multi-agent learning no-regret learning - utrecht university · multi-agent learning no-regret...
TRANSCRIPT

Multi-agent learning No-regret Learning
Multi-agent learningNo-regret Learning
Gerard Vreeswijk, Intelligent Systems Group, Computer Science Department,
Faculty of Sciences, Utrecht University, The Netherlands.
Gerard Vreeswijk. Last modified on February 16th, 2012 at 10:52 Slide 1

Multi-agent learning No-regret Learning
No-regret learning: motivation
• Reinforcement
Learning. Play those
actions that were
successful in the past.
• No-regret learning: might be considered as
an extension of reinforcement learning
No-regret =Def play those actions that
would have been successful in the past.
– Similarities:
1. Driven by pastpayo�s.2. Not interested in
(the behaviour
of) the opponent.
3. Probabilistic.
4. Smooth
adaptation.
5. Myopic.
– Differences:
a) Keeping accounts of hypothetical actions
rests on the assumption that a player is
able to estimate payoffs of actions that
were actually not played.
[Knowledge of the payoff matrix
certainly helps, but is an even more
severe assumption.]
b) Bit more easy to obtain results regarding
performance.
Gerard Vreeswijk. Last modified on February 16th, 2012 at 10:52 Slide 2

Multi-agent learning No-regret Learning
Qualitative features of reinforcement and regret
1. Probabilistic choice. A choice of action is never completely determined
by history but has a random component.
• The different magnitudes of the probabilities (arisen through
experience) ensures exploitation of past experience.
• The randomness ensures exploration.
2. Smooth adaptation. The mixed strategy adapts gradually, as with
differential equations.
• No-regret learning. (Conditionally) select a pure strategy that would
have been most successful, given past play.
• Smoothed � titious play. Give a (perturbed) best response to the
(recent) empirical frequency opponents’ actions.
• Hypothesis testing with smoothed best responses. Give a best response to
maintained beliefs about patterns of play.
Gerard Vreeswijk. Last modified on February 16th, 2012 at 10:52 Slide 3

Multi-agent learning No-regret Learning
Plan for today
Three parts.
1. Basic concepts.
2. Proportional regret matching. Hart and Mas-Colell (2000).
3. ǫ-greedy off-policy regret matching. Foster and Vohra (1999).
This presentation almost exclusively follows the second half of Ch. 2 of
(Peyton Brown, 2004). This second half is dedicated to giving insight behind
convergence results in (Foster & Vohra, 1999) and (Hart & Mas-Colell, 2000).
Foster, D., and Vohra, R. (1999). “Regret in the on-line decision problem”. Games and Economic Behavior, 29,pp. 7-36.
Hart, S., and Mas-Colell, A. (2000). “A simple adaptive procedure leading to correlated equilibrium”.Econometrica, 68, pp. 1127-1150.
Peyton Young, H. (2004): Strategic Learning and it Limits, Oxford UP. Ch. 2: “Reinforcement and Regret”
Gerard Vreeswijk. Last modified on February 16th, 2012 at 10:52 Slide 4

Multi-agent learning No-regret Learning
Part I: Basic concepts
Gerard Vreeswijk. Last modified on February 16th, 2012 at 10:52 Slide 5

Multi-agent learning No-regret Learning
No-regret: example
Payoffs Player A 0 0 0 1 1 0 0 0 1 0 0
Actions Player A L R L L R R L R R R R ?
Actions Player B R L R L R L R L R L L ?
• Suppose A is offered to replay the first 11 periods, under the proviso that
he must play one pure strategy throughout.
• Payoff Average Regret
Rounds 1-11: 3
Had L been played: 6 (6 − 3)/11
Had R been played: 5 (5 − 3)/11
• It is ignored that B would likely have played different if he knew A would
play different.
• Thus, no-regret fails to take the interactive nature of play into account.
Gerard Vreeswijk. Last modified on February 16th, 2012 at 10:52 Slide 6

Multi-agent learning No-regret Learning
No-regret: some notation
• The average payo� up to and
including round t is
ut =Def1
t
t
∑s=1
u(xs, ys)
• For each action x, the hypotheti alaverage payo� for playing x is
htx =Def
1
t
t
∑s=1
u(x, ys)
• For each action x, the average regretfrom not having played x is
rtx =Def ht
x − ut
• Multiple regret may be represented
as a vector
rt =Def (rt1, . . . , rt
k)
• A given realisation of play
ω = (x1, y1), . . . , (xt, yt), . . .
is said to have no regret if, for all
actions x,
limt→∞
sup rtx(ω)
( = limT→∞
sup{ rtx(ω) | t ≥ T } )
≤ 0.
Gerard Vreeswijk. Last modified on February 16th, 2012 at 10:52 Slide 7

Multi-agent learning No-regret Learning
Part II: proportional regret
matching
Gerard Vreeswijk. Last modified on February 16th, 2012 at 10:52 Slide 8

Multi-agent learning No-regret Learning
Strategies and regret matching
A strategy g : H → ∆(X) is said to have no regret if almost all its realisations
of play have no regret.
The objective is to formulate a strategy without regret. One such strategy (we
can already say) is proposed by Hart and Mas-Colell (2000):
qt+1x =Def
[rtx]+
∑x′∈X[rtx′ ]+
where [z]+ =Def z ≥ 0 ? z : 0. This rule is called proportional regret mat hing,
or regret mat hing (RM for short).
Theorem (Hart & Mas-Colell, 2000). In a finite game, regret matching by a given
player almost surely yields no regret against every possible sequence of play by the
opponent(s).
Hart & Mas-Colell (2000). “A simple adaptive procedure leading to correlated equilibrium”. Econometrica,68, pp. 1127-1150.
Gerard Vreeswijk. Last modified on February 16th, 2012 at 10:52 Slide 9
Multi-agent learning No-regret Learning
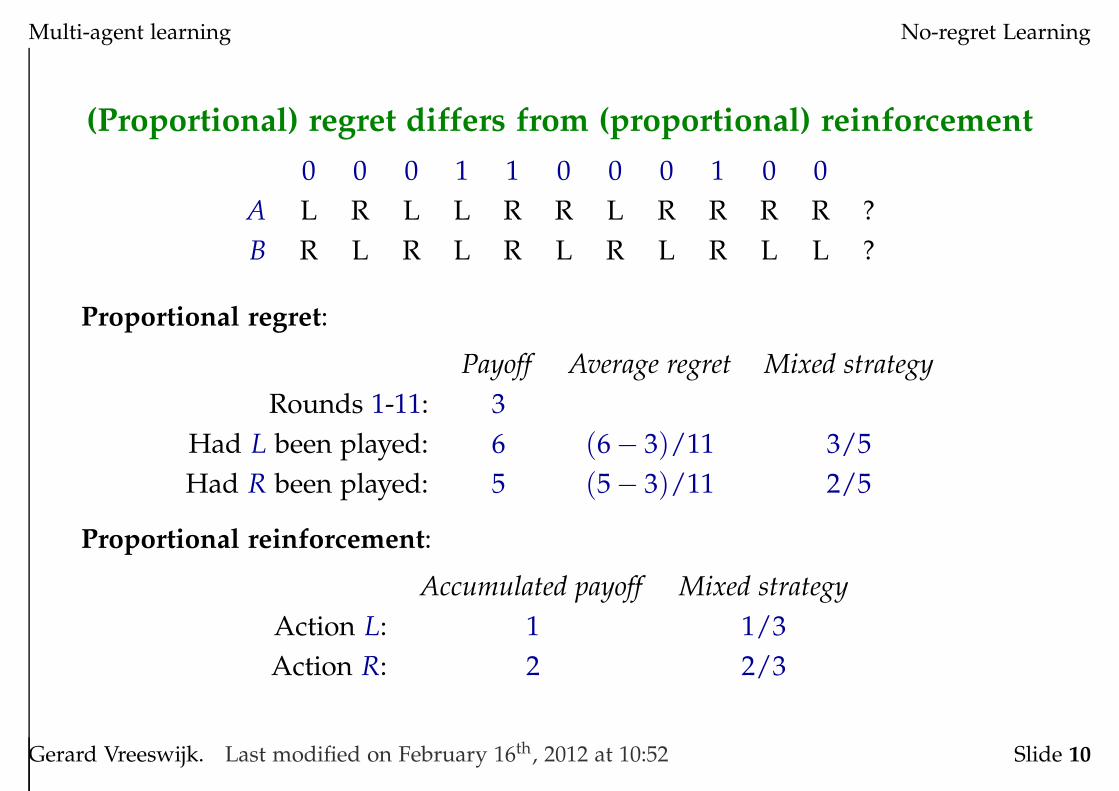
(Proportional) regret differs from (proportional) reinforcement
0 0 0 1 1 0 0 0 1 0 0
A L R L L R R L R R R R ?
B R L R L R L R L R L L ?
Proportional regret:
Payoff Average regret Mixed strategy
Rounds 1-11: 3
Had L been played: 6 (6 − 3)/11 3/5
Had R been played: 5 (5 − 3)/11 2/5
Proportional reinforcement:
Accumulated payoff Mixed strategy
Action L: 1 1/3
Action R: 2 2/3
Gerard Vreeswijk. Last modified on February 16th, 2012 at 10:52 Slide 10

Multi-agent learning No-regret Learning
Regret matching cast into a form similar to reinforcement
• Through reinforcement with an
aspiration level ut.
• Define the reinfor ement in rementfor every x in round t as
∆rtx =Def u(x, yt)− ut
• Define the propensities in round
t + 1 as
θt+1x =Def
[t
∑s=1
∆rtx
]
+
• This is like standard
reinforcement, but now all
actions in a given period are
reinforced, whether or not they
are actually played.
• Hypotheti al reinfor ement takes
into account virtual payoffs.
(Payoffs that never materialised.)
The vector ∆rt is a vector of
“virtual” reinforcements—gains
or losses relative to the current
average that that would have
materialised if a given action x
had been played at time t.
Gerard Vreeswijk. Last modified on February 16th, 2012 at 10:52 Slide 11

Multi-agent learning No-regret Learning
Adequacy of regret matching: proof outline
• Let
rtx =Def a umulated regret for not playing x, up to and including t
and
rtx =Def average regret for not playing x, up to and including t.
Let
[rtx]+ =Def rt
x ≥ 0 ? : rtx : 0
Dropping the subscript, x, is a way to denote the complete vector [rt]+ of
average regrets.
• The objective is to show that
limt→∞
sup [rt]+ = 0
with probability one. (The zero on the RHS again is a vector.)
Gerard Vreeswijk. Last modified on February 16th, 2012 at 10:52 Slide 12

Multi-agent learning No-regret Learning
Incremental regret
Suppose there are only two actions, “1” and “2,” say.
1. If 1 is executed at t + 1 then
• rt+11 will not change.
• rt+12 changes with u(2, yt+1) − u(1, yt+1).
2. If 2 is executed at t + 1 then
• rt+11 changes with u(1, yt+1) − u(2, yt+1).
• rt+12 will not change.
Thus, if αt+1 =Def u(2, yt+1)− u(1, yt+1) then incremental regret will be either
(0, αt+1) or (−αt+1, 0).
Suppose in round t + 1 a mixed strategy qt+1 = (qt+11 , qt+1
2 ) is played. Then
the expe ted in remental regret is
E[∆rt+1] = (qt+11 · 0 + qt+1
2 · −αt+1 , qt+11 · αt+1 + qt+1
2 · 0)
Gerard Vreeswijk. Last modified on February 16th, 2012 at 10:52 Slide 13

Multi-agent learning No-regret Learning
Decrease of expected regret
The objective is to find a (mixed) strategy g : H → ∆({1, 2}) such that
E[ [rt+1]+ | rt, . . . , r1] < rt (1)
because then again one of the martingale convergence theorems can be
applied to conclude limt→∞[rt]+ = 0. Since ∆E[rt+1] is known, we have
E[ rt+1 | rt, . . . , r1] = E[rt + ∆rt+1
t + 1| rt, . . . , r1]
=t
t + 1E[
rt
t| rt, . . . , r1] +
1
t + 1E[∆rt+1 | rt, . . . , r1]
=t
t + 1rt +
1
t + 1E[∆rt+1 | rt, . . . , r1]
=t
t + 1rt +
1
t + 1(−αt+1qt+1
2 , αt+1qt+11 )
The objective is to find a strategy qt+1 = g(ξt) such that Eq. (1) is satisfied.
Gerard Vreeswijk. Last modified on February 16th, 2012 at 10:52 Slide 14

Multi-agent learning No-regret Learning
A strategy q such that limt→∞[rt]+ = 0 : 1st attempt
Take qt1 = qt
2 = 1/2 for all t.
Then
E[rt1 + rt
2] = E[rt−1
1 + ∆rt1
t+
rt−12 + ∆rt
2
t]
= E[rt−1
1 + αt/2
t+
rt−12 − αt/2
t]
= E[rt−11 + rt−1
2 ]
Hence,
E[rt1 + rt
2] = 0,
so that limt→∞ rt1 + rt
2 = 0 with probability one.
However, the two regrets themselves may be unbounded and neutralise each
other. (Which is not what we want—we want all regrets to be non-positive.)
Gerard Vreeswijk. Last modified on February 16th, 2012 at 10:52 Slide 15

Multi-agent learning No-regret Learning
A strategy q such that limt→∞[rt]+ = 0 : 2nd attempt
• Each round t, choose an action
that would have minimised regret
in the previous round.
• Matching Pennies:
– Switch if wrong action in
previous round; else stay.
– Won’t work: suppose you
meet an opponent who
happens to switch every
round as well . . .
• Won’t work in general: your
corrections may by coincidence
be “in phase” with the path of
play of your opponent. Peyton
Young:
“Recall the no-regret must
hold even when Nature is
malevolent.”
(p. 26)
Gerard Vreeswijk. Last modified on February 16th, 2012 at 10:52 Slide 16

Multi-agent learning No-regret Learning
A strategy q such that limt→∞[rt]+ = 0 : E[∆rt+1] ⊥ rt+
• Recall: our objective is [rt]+ → 0.
• To this end, choose qt+1 such that
E[∆rt+1] ⊥ [rt]+
Thus:
E[∆rt+1]· rt+ = 0
⇔ (αt+1qt+12 , −αt+1qt+1
1 )· rt+ = 0
⇔ αt+1(qt+12 [rt
1]+ − qt+11 [rt
2]+) = 0
⇔ qt+11 : qt+1
2 = [rt1]+ : [rt
2]+
The last equation precisely
amounts to proportional regret
matching.
(Notice that αt+1 has left the
stage.)
• Boundary cases are obvious and
can be treated as follows:
– If rt1 > 0 and rt
2 ≤ 0, then let
qt+1 =Def (1, 0).
– If rt1 ≤ 0 and rt
2 > 0, then let
qt+1 =Def (0, 1).
– If all regret is non-positive,
then play a random action.
Gerard Vreeswijk. Last modified on February 16th, 2012 at 10:52 Slide 17

Multi-agent learning No-regret Learning
Stochastic dynamics of regret matching
• Expected incremental regret, E[∆rt+1] is
made orthogonal to the current regret,
independently of the unknown αt+1.
(Because A does not know what B
plays at t + 1, it is crucial that qt+1 does
not depend on αt+1.)
• E[rt+1] is a convex combination of rt+
and E[∆rt+1].
• Since E[∆rt+1] ⊥ rt+, E[rt+1] lies closer
to the non-positive orthant than does
rt+, provided t is large.
• rt+ → 0 follows from Bla kwell'sapproa hability theorem (PY, 2004, Ch. 4).
•[rt]+
•E[rt+1]
•E[∆rt+1]
Gerard Vreeswijk. Last modified on February 16th, 2012 at 10:52 Slide 18

Multi-agent learning No-regret Learning
Stochastic dynamics of regret matching
••••
•
••••
•
•
• •
•
••••
(Not sure whether the trace below the x-axis makes sense.)
Gerard Vreeswijk. Last modified on February 16th, 2012 at 10:52 Slide 19

Multi-agent learning No-regret Learning
Part III:
ǫ-Greedy Off-policy
Regret Matching
Gerard Vreeswijk. Last modified on February 16th, 2012 at 10:52 Slide 20

Multi-agent learning No-regret Learning
ǫ-Greedy regret matching (Foster & Vohra, 1998)
ǫ-greedy regret matching. Let ǫ > 0 small.
1. Explore. Play randomly ǫ% of the time. Only then compute regret.
2. Exploit. Else, play o�-poli y no regret.Define o�-poli y no regret for x in round t as
rtx =Def rt
x(E) − ut, where rtx(E) =
[
1
|Ex|∑
t∈Ex
u(xt, yt)
]
and
Ex = {t | A experimented in round t and played x }.
• Proposed as a forecasting heuristic by Foster and Vohra (1993).
• Can be conceived as a way of estimating regrets without knowing, or
having to care for, the actions of the opponent.
Gerard Vreeswijk. Last modified on February 16th, 2012 at 10:52 Slide 21

Multi-agent learning No-regret Learning
ǫ-Greedy regret matching (outline of proof)
Theorem (Foster et al., 1998). For all δ > 0 there exists an ǫ > 0 such that
ǫ-greedy regret matching has at most δ regret against all realisations of play.
By letting ǫ → 0 through time at a sufficiently slow rate, one can guarantee there is
no regret in the long run.
Proof . Suppose there are k different actions. Let et ∈ Rk such that
etx = ( A explores at t and chooses x ) ? 1 : 0.
For each action i
Pr(xt = i | A explores at round t) = 1/k.
Hence,
E[et] = (ǫ/k, . . . , ǫ/k).
Gerard Vreeswijk. Last modified on February 16th, 2012 at 10:52 Slide 22

Multi-agent learning No-regret Learning
ǫ-Greedy regret matching (outline of proof)
Define
ztx =Def
(k
ǫ· et
x· u(x, yt)
)
− u(x, yt).
In words, ztx is the difference between (properly magni�ed) empiri al payo� for x
and ( orre t but) virtual payo� for x. Hence,
E[ztx] = E
[(k
ǫ· et
x· u(x, yt)
)
− u(x, yt)
]
= E
[k
ǫ· et
x· u(x, yt)
]
− E[u(x, yt)]
=k
ǫ· E[et
x]· E[u(x, yt)] − E[u(x, yt)] (et and ut are independent)
=k
ǫ·
ǫ
k· E[u(x, yt)] − E[u(x, yt)]
= 0.
Gerard Vreeswijk. Last modified on February 16th, 2012 at 10:52 Slide 23

Multi-agent learning No-regret Learning
ǫ-Greedy regret matching (outline of proof)
Strong law of large numbers for dependent random variables. Let {wt}t
be a bounded sequence of possibly dependent random variables in Rk. Let
zt = E[ wt |wt−1, wt−2, . . . , w1 ] − wt, and zt the average of the zt’s. Then
limt→∞ zt = 0 with probability one.
We have
ztx =Def
(k
ǫ· et
x· u(x, yt)
)
− u(x, yt).
and
E[ztx] = 0.
If
zt =Def average of zs, s ≤ t
then it follows from the above strong law of large numbers that limt→∞ zt = 0
with probability one. (PY refers to Loève, 1978, Book II, Th. 32.E.1.)
Gerard Vreeswijk. Last modified on February 16th, 2012 at 10:52 Slide 24

Multi-agent learning No-regret Learning
Estimated vs. true regret
Now write ztx as follows (!):
ztx =
1
t
k
ǫ
t
∑s=1
esx· u(x, ys)− ut
︸ ︷︷ ︸
regret estimated
in experimentation
−1
t
t
∑s=1
u(x, ys) − ut
︸ ︷︷ ︸
proper regret
a) The first term approaches regret
as estimated in experimental
rounds, since ǫt/k → ∞ when
t → ∞.
b) The second term is true regret.
c) Since we know limt→∞ zt = 0,
empirical regret converges to true
regret almost certainly.
d) (1 − ǫ)% of the time A plays
estimated regret true regret.
e) ǫ% of the time A explores, and
strategies are within 1 + 1 = 2.
f) In the long run, play is within 2ǫ
of minimal regret.
g) If ǫ is set to δ/2, the error
remains within 2 · δ/2. �
Gerard Vreeswijk. Last modified on February 16th, 2012 at 10:52 Slide 25

Multi-agent learning No-regret Learning
Literature
• No-regret learning can be traced
to Bla kwell's approa habilitytheorem and Hannan’s notion ofuniversal onsisten y.
• The diagram on regret matching
is taken from Peyton Young, and
Foster and Vohra (who formulate
the problem from a decision
theoretic point of view).
• The regret-matching algorithm
and the analysis of its
convergence to correlated
equilibria (a generalisation of
Nash equilibria) is given by Hart
and Mas-Colell.
Blackwell, D. (1956). “Controlled random walks”.Proc. of the Int. Congress of Mathematicians, North-Holland Publishing Comp., pp. 336-338.
Hannan, J. F. (1957). “Approximation to Bayes riskin repeated plays”. Contributions to the Theory ofGames, 3, pp. 97-139.
Hart, S., and Mas-Colell, A. (2000). “A simple adap-tive procedure leading to correlated equilibrium”.Econometrica, 68, pp. 1127-1150.
Foster, D., and Vohra, R. (1999). “Regret in the on-line decision problem”. GEB: Games and EconomicBehavior, 29, pp. 7-36.
Gerard Vreeswijk. Last modified on February 16th, 2012 at 10:52 Slide 26

Multi-agent learning No-regret Learning
What next?
• Fictitious Play. Monitor actions of opponent(s) and play a best response to
most frequent actions. As opposed to no-regret, fictitious play is
interested in the opponent's behaviour to predict future play.
• Smoothed fictitious play. With fictitious play, the probability to play
sub-optimal responses is zero. Smoothed fictitious play plays sub-optimal
responses proportional to their expected payoff, given opponents’ play.
• Conditional no-regret. Conditions on particular actions. There is regret if
there is a pair of actions (x, x′) such that, with hindsight, playing x′ was
better than playing x.
• Satisficing Play. While payoffs equal or supersede the average of past
payoffs, keep playing the same action.
Gerard Vreeswijk. Last modified on February 16th, 2012 at 10:52 Slide 27