movitrac® ltx movitrac® ltp-b 的伺服模块 · 2014. 8. 2. · 操作手册补充文件 –...
TRANSCRIPT
驱动技术 \驱动自动化 \系统集成 \服务
操作手册补充文件
MOVITRAC® LTXMOVITRAC® LTP-B的伺服模块
02/2011版本 17066654 / ZH
SEW-EURODRIVE—Driving the world
操作手册补充文件 – MOVITRAC® LTX伺服模块 3
目录
1 重要提示............................................................................................................................5
1.1 手册的使用...............................................................................................................5
1.2 安全提示的组成.......................................................................................................5
1.2.1 提示语含义 ................................................................................................51.2.2 针对不同章节的安全提示的组成 .............................................................61.2.3 包含在操作步骤内的安全提示的组成 ......................................................6
1.3 质保承诺...................................................................................................................7
1.4 质保范围...................................................................................................................7
1.5 版权标注...................................................................................................................7
1.6 其它适用文献...........................................................................................................7
1.7 产品名称和商标.......................................................................................................7
2 设备结构............................................................................................................................82.1 MOVITRAC® LTX..................................................................................................8
2.2 型号描述...................................................................................................................8
2.2.1 铭牌举例 ...................................................................................................8
3 机械安装............................................................................................................................9
3.1 MOVITRAC® LTX的安装........................................................................................9
3.2 拆下 MOVITRAC® LTX .......................................................................................10
4 电气安装..........................................................................................................................11
4.1 键盘模式的信号端子总览 .....................................................................................12
4.1.1 主接线端子 ..............................................................................................124.1.2 应用设备接头 X14的端子配置 ...............................................................13
4.2 端子操作模式的信号端子总览(不带控制器 / 网关的 LTP的内部斜坡控制)..................................................14
4.2.1 主接线端子 ..............................................................................................144.2.2 应用设备接头 X14的端子配置 ...............................................................15
4.3 非 SEW控制器的信号端子总览...........................................................................16
4.3.1 主接线端子 ..............................................................................................164.3.2 应用设备接头 X14的端子配置 ...............................................................17
4.4 SEW控制器的信号端子总览................................................................................18
4.4.1 主接线端子 ..............................................................................................184.4.2 应用设备接头 X14的端子配置 ...............................................................19
4.5 SEW网关的信号端子总览....................................................................................20
4.5.1 主接线端子 ..............................................................................................204.5.2 应用设备接头 X14的端子配置 ...............................................................21
4.6 继电器接线端子和 X13的总览.............................................................................22
4.6.1 继电器接线端子总览(适合所有操作模式) .........................................224.6.2 电机编码器接头 X13的端子配置(适合所有操作模式) .....................22
4 操作手册补充文件 – MOVITRAC® LTX伺服模块
目录
5 调试 .................................................................................................................................23
5.1 用户设备接口.........................................................................................................23
5.1.1 键盘 .........................................................................................................235.1.2 显示屏 .....................................................................................................24
5.2 MOVITRAC® LTX的简单调试 ..............................................................................25
5.2.1 在根据操作模式进行调试前的基本接线和设置 .....................................265.2.2 键盘模式(P1-12 = 1或 2) ..................................................................275.2.3 端子操作模式(基本设置) P1-12 = 0,用于 LTP内部斜坡控制 .......275.2.4 不同控制器的连接和调试(SEW和非 SEW控制器) .........................28
5.3 软件.........................................................................................................................30
5.3.1 Modbus控制 ...........................................................................................305.4 不同操作模式下的控制回路优化..........................................................................31
5.4.1 使用非 SEW控制器时的控制回路优化 .................................................315.4.2 使用 SEW控制器时的控制回路优化 .....................................................335.4.3 网关操作模式的控制回路优化 ...............................................................34
6 参数 .................................................................................................................................35
6.1 LTX特定参数(界面 1)......................................................................................35
6.2 P1-14 扩展参数调用..............................................................................................36
6.3 P1-15二进制输入端的功能选择, LTX特定参数..............................................36
6.4 P1-16 电机型号......................................................................................................38
6.5 P1-17 智能伺服操作..............................................................................................39
6.6 P1-21 刚性..............................................................................................................39
6.7 P1-22 电机负载惯性..............................................................................................39
6.8 P2-01 预设转速 1................................................................................................40
6.9 P2-05 预设转速 5................................................................................................40
6.10 P2-06 预设转速 6................................................................................................40
6.11 LTX功能参数组(界面 3)..................................................................................40
6.11.1 P8-01 模拟编码器定标 ...........................................................................406.11.2 P8-02 步进 /方向或 A/B相位输入端每转的脉冲数 ..............................406.11.3 P8-03 / P8-04 位置偏差的动作极限值 ...................................................406.11.4 P8-05 参考运行 ......................................................................................416.11.5 P8-06 比例增益位置控制器 ....................................................................456.11.6 P8-07 测量开关脉冲沿 ...........................................................................456.11.7 P8-09 速度预控的增益 ...........................................................................466.11.8 P8-10 加速预控的增益 ...........................................................................466.11.9 P8-11, P8-12 参考偏移位置 ..................................................................466.11.10 P8-14 固定止挡的转矩 .........................................................................466.11.11 P8-15 转速和位置控制器自动调谐 ......................................................46
7 技术数据和尺寸图 ..........................................................................................................47
7.1 环境.........................................................................................................................47
7.2 应用设备接头 X14的技术数据.............................................................................47
7.3 MOVITRAC® LTX尺寸图......................................................................................48
关键词目录......................................................................................................................50
1重要提示手册的使用
操作手册补充文件 – MOVITRAC® LTX伺服模块 5
1 重要提示
1.1 手册的使用本手册是产品的组成部分,其中包含安装、调试、操作和维修的重要说明。 本手册主要针对所有从事设备安装、调试和维修作业的人员而编写。
手册必须字迹清晰并且易于理解。 确保设备和设备运行负责人及设备操作人员已仔细阅读并理解本手册。 若对手册内容存在疑问或欲了解更多信息,请联系 SEW-EURODRIVE公司。
1.2 安全提示的组成遵守相关手册中的规定是以下情况的前提:
• 无故障运行
• 满足质量缺陷索赔要求
因此,在操作设备之前,请先阅读操作手册!
本操作说明书包含重要的维修提示。 因此 ,请将操作手册存放在设备附近。
1.2.1 提示语含义
下表对安全提示、财产损失警告和其它提示的提示语进行分级并说明含义。
提示语 含义 不遵守提示引发的后果
危险! 直接面临的危险 重伤或死亡
警告! 可能出现的危险情况 重伤或死亡
当心! 可能出现危险 轻伤
当心! 可能出现财物损失 对驱动系统或周围环境造成损害
提示 有用的提示或技巧: 简化驱动系统的操作。
1 重要提示安全提示的组成
6 操作手册补充文件 – MOVITRAC® LTX伺服模块
1.2.2 针对不同章节的安全提示的组成
同章节相关的安全提示不仅适用于特别操作,也适用于同一主题内的多种操作。 所使用的图标可以表示一般或特别的危险。
此处显示了同章节相关安全提示的正式结构:
下面是针对不同章节的安全提示举例:
1.2.3 包含在操作步骤内的安全提示的组成
在描写危险的操作步骤之前,嵌入式安全提示已结合进说明当中了。
此处显示了嵌入式安全提示的正式结构:
• 提示语 危险的类别和原因。
不遵守提示可能引发的后果。
• 危险防范措施。
下面是包含在操作步骤内的安全提示举例:
• 危险! 驱动装置意外重启会造成挤伤。
重伤或死亡。
• 切断驱动装置电压。
• 采取有效措施,防止驱动装置意外重启。
提示语!
危险的类别和原因。
不遵守提示可能引发的后果。
• 避免危险的措施。
警告!
小心悬吊的重物坠落。
重伤或死亡。
• 请勿在悬吊物下停留。• 对危险区域进行保护。
1重要提示质保承诺
操作手册补充文件 – MOVITRAC® LTX伺服模块 7
1.3 质保承诺
遵守 MOVITRAC®-LTP-B 的技术文件是确保设备正常运行和履行质保承诺的前提条件。因此,在您操作设备之前,请先阅读本操作手册 !
确保设备和设备运行负责人及设备操作人员可以随时查阅本手册。
1.4 质保范围遵守本文件是确保设备正常运行并达到规定的产品性能和效率特征的前提条件。 对不遵守技术文件而造成的人员伤害和财物损失,SEW-EURODRIVE公司概不负责。 在这类情况下质保承诺失效。
1.5 版权标注© 2010 – SEW-EURODRIVE。 版权所有。
未经许可,严禁对本操作手册进行复制、更改、传播和用于其它用途。
1.6 其它适用文献本文件是 MOVITRAC® LTP-B操作手册的补充, 只能与 MOVITRAC® LTP-B的操作手册配合使用。
1.7 产品名称和商标本手册中涉及的商标和产品名称是相关产品的商标或注册商标。
2 设备结构MOVITRAC® LTX
8 操作手册补充文件 – MOVITRAC® LTX伺服模块
2 设备结构
2.1 MOVITRAC® LTX
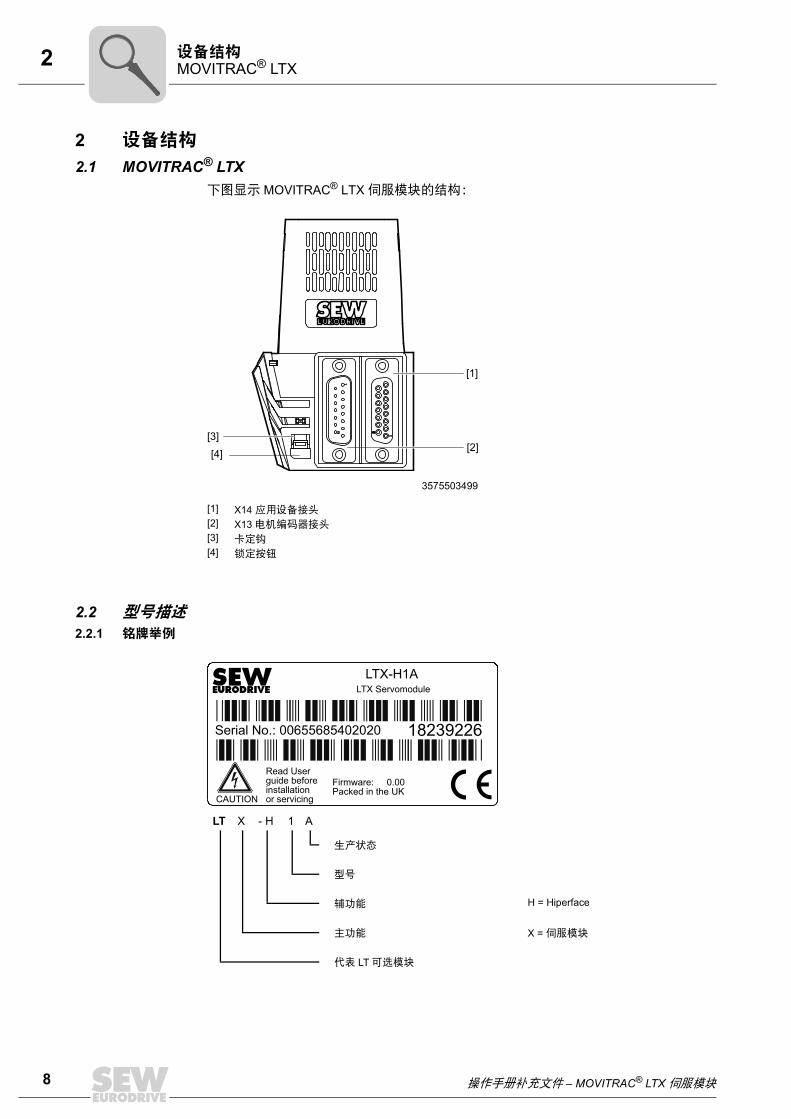
下图显示 MOVITRAC® LTX伺服模块的结构:
2.2 型号描述2.2.1 铭牌举例
3575503499
[1] X14 应用设备接头[2] X13 电机编码器接头[3] 卡定钩[4] 锁定按钮
[1]
[2][3][4]
LT X - H 1 A
生产状态
型号
辅功能 H = Hiperface
主功能 X = 伺服模块
代表 LT可选模块
LTX-H1ALTX Servomodule
Serial No.: 00655685402020 18239226
Read User guide beforeinstallationor servicing
Firmware: 0.00Packed in the UK
CAUTION
3机械安装MOVITRAC® LTX的安装
操作手册补充文件 – MOVITRAC® LTX伺服模块 9
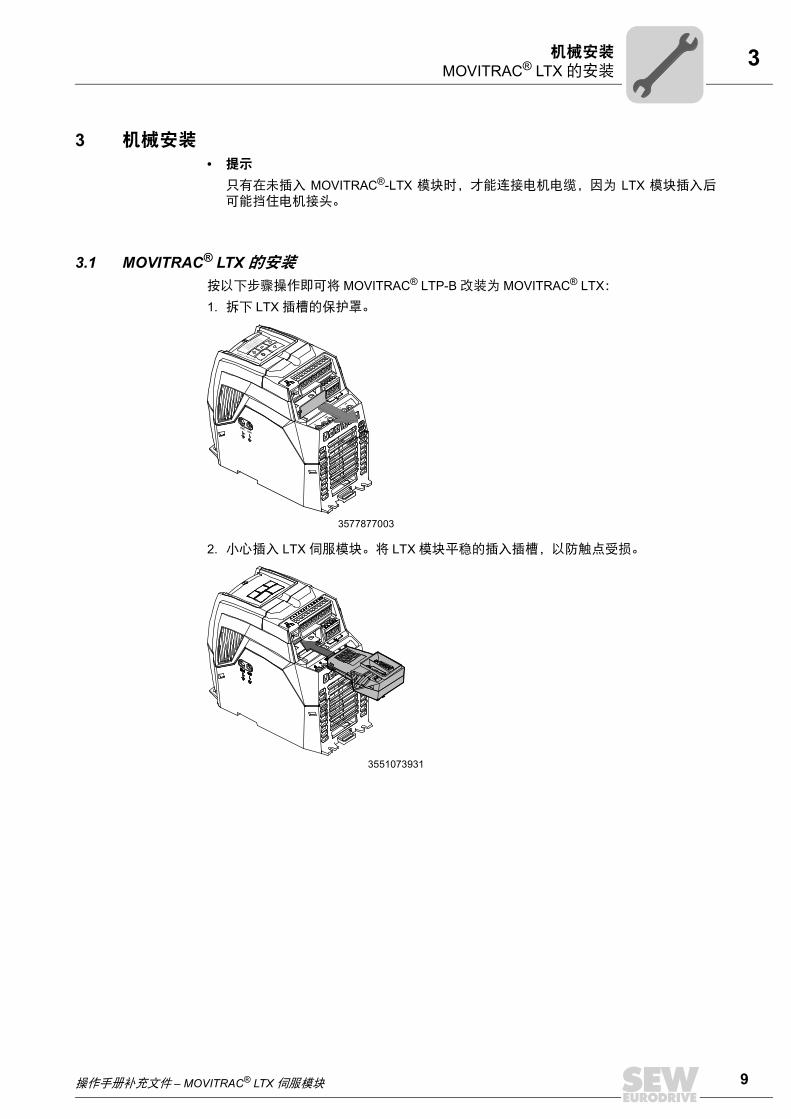
3 机械安装• 提示
只有在未插入 MOVITRAC®-LTX 模块时,才能连接电机电缆,因为 LTX 模块插入后可能挡住电机接头。
3.1 MOVITRAC® LTX的安装
按以下步骤操作即可将 MOVITRAC® LTP-B改装为 MOVITRAC® LTX:
1. 拆下 LTX插槽的保护罩。
2. 小心插入 LTX伺服模块。 将 LTX模块平稳的插入插槽,以防触点受损。
3577877003
3551073931
MOVITRAC® LTP-B
12
34
56
78
910
1112
13
18
1416
W
V
BR
EMCVAR
+
17
15
3 机械安装拆下 MOVITRAC® LTX
10 操作手册补充文件 – MOVITRAC® LTX伺服模块
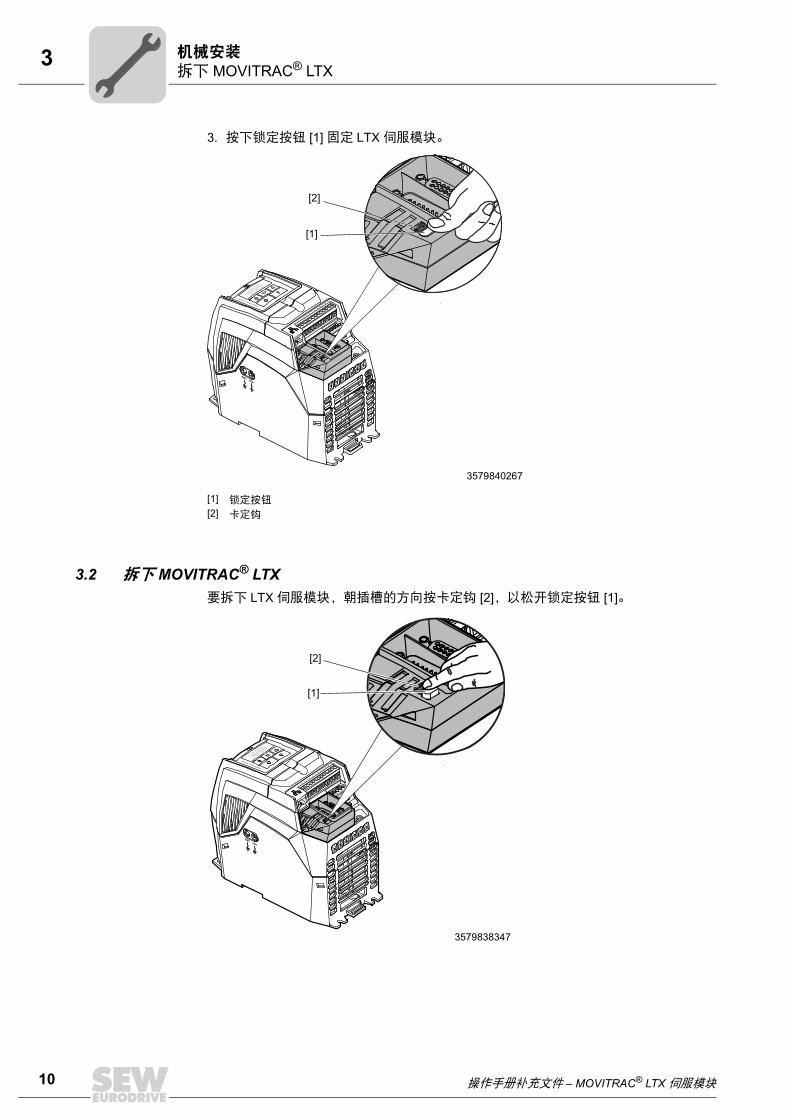
3. 按下锁定按钮 [1] 固定 LTX伺服模块。
3.2 拆下 MOVITRAC® LTX
要拆下 LTX伺服模块,朝插槽的方向按卡定钩 [2],以松开锁定按钮 [1]。
3579840267
[1] 锁定按钮[2] 卡定钩
MOVITRAC® LTP-B
12
34
56
78
910
1112
13
18
1416
W
V
BR
EMCVAR
+
17
15
[2]
[1]
3579838347
MOVITRAC® LTP-B
12
34
56
78
910
1112
13
18
1416
W
V
BR
EMCVAR
+
17
15
[2]
[1]
4电气安装拆下 MOVITRAC® LTX
操作手册补充文件 – MOVITRAC® LTX伺服模块 11
4 电气安装本章介绍以下接口的接线:
• 主接线端子
• 继电器接线端子
• 电机编码器 X13
• X14 应用设备接头
主接线端子和应用设备接头的接线取决于驱动装置的操作模式。 驱动装置有以下标准的操作模式:
• 键盘模式
• 端子操作模式
• 非 SEW控制器操作模式
• SEW控制器操作模式
• 网关操作模式
根据操作模式进行接线时确保功能正常不可缺少的前提条件。 因此不同的接线方式分小节介绍。
强烈建议用户先执行一次简单的调试,因为在阅读本章内容时需要根据所选择的操作模式相应查看对应小节内的接线说明。
无论选择什么操作模式,电机编码器接头 X13和继电器接线端子的接线方式相同。 因此对这两个接头的接线只作一次说明。

4 电气安装键盘模式的信号端子总览
12 操作手册补充文件 – MOVITRAC® LTX伺服模块
4.1 键盘模式的信号端子总览4.1.1 主接线端子
信号端子板有以下信号接头:
IP20和 IP55
端子编号 信号 功能P1-12 = 1P1-15 = 1(预设)
说明
1 +24 V +24 V参考电压输出 激活 DI1~ DI3的参考电位(最大 100 mA)
2 DI 1 使能 正逻辑“逻辑 1”输入电压范围: DC 8 ~ 30 V“逻辑 0”输入电压范围: DC 0 ~ 2 V如果在端子 7或 9连接 0 V,和 PLC要求兼容。
3 DI 2 不作说明 1)
1) 不接线
4 DI 3 不作说明 1)
5 +10 V 不作说明 1) 模拟输入端的 10 V参考电位(电位供应 +,最大 10 mA,最小 1 kΩ)
6 AI 1 / DI 4 不作说明 1) 0 ~ 10 V、 0 ~ 20 mA、 4 ~ 20 mA“逻辑 1”输入电压范围: DC 8 ~ 30 V
7 0 V 0 V参考电位 0 V参考电位(电位供应 –)
8 AO 1 / DO 1 不作说明 1) 0 ~ 10 V, 20 mA模拟24 V, 20 mA数字
9 0 V 0 V参考电位 0 V参考电位
10 AI 2 / DI 5 不作说明 1) 0 ~ 10 V、 0 ~ 20 mA、 4 ~ 20 mA“逻辑 1”输入电压范围: DC 8 ~ 30 V
11 AO 2 / DO 2 不作说明 1) 0 ~ 10 V, 20 mA模拟24 V, 20 mA数字
12 PSE+ 输出级使能 +24 V必须与 PSE+ 连接
13 PSE– GND必须与 PSE– 连接
+24
V
DI 1
DI 2
DI 3
+10
VA
I 1 /
DI 4
0 V
AO
1 /
DO
1
0 V
AO
2 /
DO
2
PS
E+
PS
E–
AI 2
/ D
I 5
1 2 3 4 5 6 7 8 9 10 11 12 13
4电气安装键盘模式的信号端子总览
操作手册补充文件 – MOVITRAC® LTX伺服模块 13
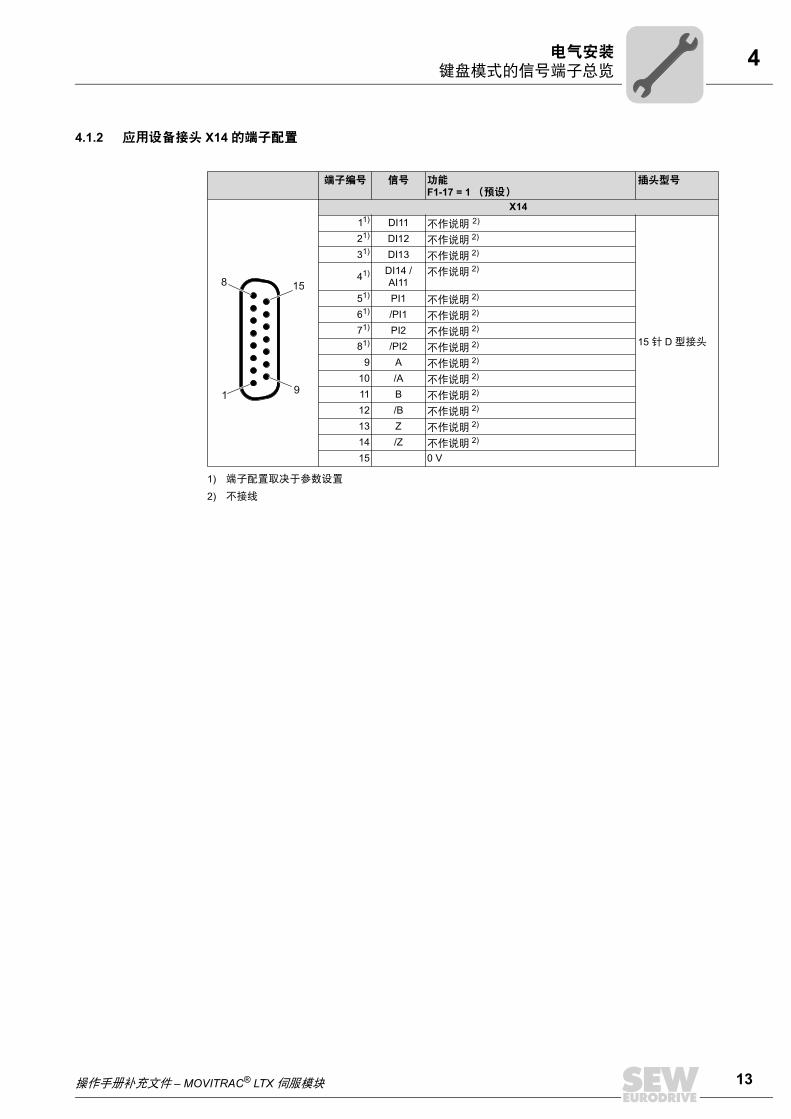
4.1.2 应用设备接头 X14的端子配置
端子编号 信号 功能F1-17 = 1(预设)
插头型号
X14
11)
1) 端子配置取决于参数设置
DI11 不作说明 2)
2) 不接线
15针 D型接头
21) DI12 不作说明 2)
31) DI13 不作说明 2)
41) DI14 / AI11
不作说明 2)
51) PI1 不作说明 2)
61) /PI1 不作说明 2)
71) PI2 不作说明 2)
81) /PI2 不作说明 2)
9 A 不作说明 2)
10 /A 不作说明 2)
11 B 不作说明 2)
12 /B 不作说明 2)
13 Z 不作说明 2)
14 /Z 不作说明 2)
15 0 V
9
15
1
8
4 电气安装端子操作模式的信号端子总览(不带控制器 / 网关的 LTP的内部斜坡控制)
14 操作手册补充文件 – MOVITRAC® LTX伺服模块
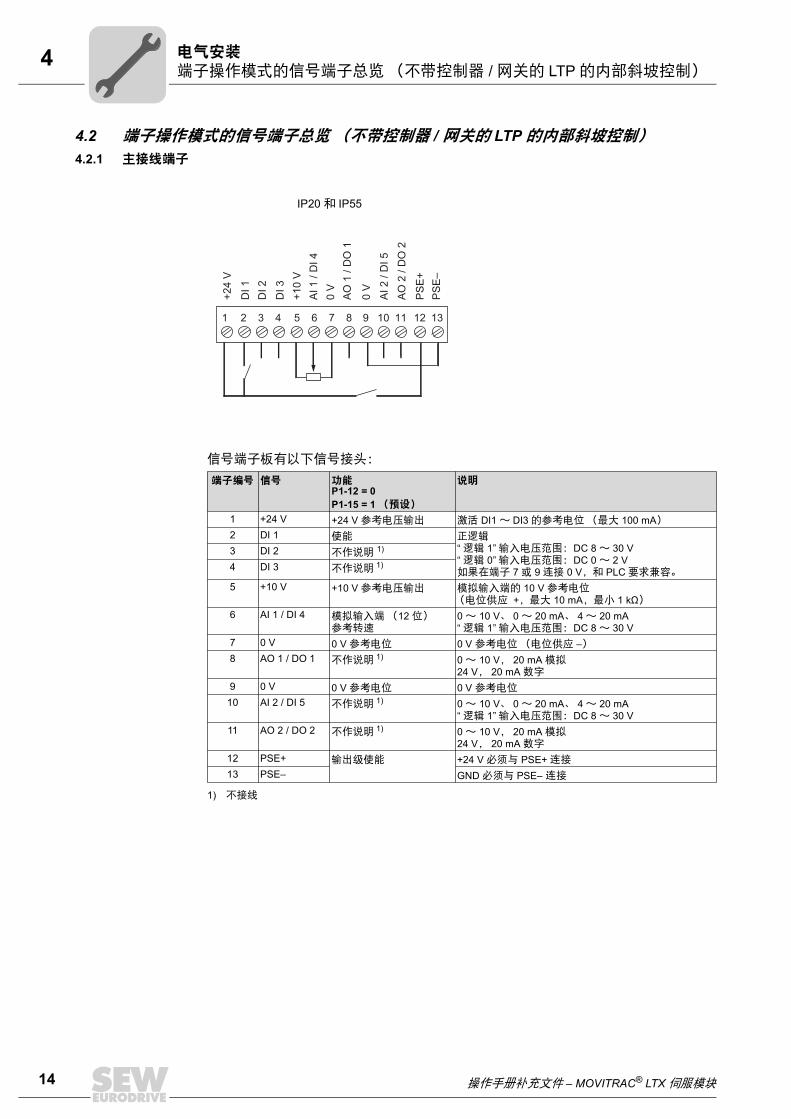
4.2 端子操作模式的信号端子总览(不带控制器 / 网关的 LTP的内部斜坡控制)
4.2.1 主接线端子
信号端子板有以下信号接头:
IP20和 IP55
端子编号 信号 功能P1-12 = 0P1-15 = 1(预设)
说明
1 +24 V +24 V参考电压输出 激活 DI1~ DI3的参考电位(最大 100 mA)
2 DI 1 使能 正逻辑“逻辑 1”输入电压范围: DC 8 ~ 30 V“逻辑 0”输入电压范围: DC 0 ~ 2 V如果在端子 7或 9连接 0 V,和 PLC要求兼容。
3 DI 2 不作说明 1)
1) 不接线
4 DI 3 不作说明 1)
5 +10 V +10 V参考电压输出 模拟输入端的 10 V参考电位(电位供应 +,最大 10 mA,最小 1 kΩ)
6 AI 1 / DI 4 模拟输入端(12位)参考转速
0 ~ 10 V、 0 ~ 20 mA、 4 ~ 20 mA“逻辑 1”输入电压范围: DC 8 ~ 30 V
7 0 V 0 V参考电位 0 V参考电位(电位供应 –)
8 AO 1 / DO 1 不作说明 1) 0 ~ 10 V, 20 mA模拟24 V, 20 mA数字
9 0 V 0 V参考电位 0 V参考电位
10 AI 2 / DI 5 不作说明 1) 0 ~ 10 V、 0 ~ 20 mA、 4 ~ 20 mA“逻辑 1”输入电压范围: DC 8 ~ 30 V
11 AO 2 / DO 2 不作说明 1) 0 ~ 10 V, 20 mA模拟24 V, 20 mA数字
12 PSE+ 输出级使能 +24 V必须与 PSE+ 连接
13 PSE– GND必须与 PSE– 连接
+24
V
DI 1
DI 2
DI 3
+10
VA
I 1 /
DI 4
0 V
AO
1 /
DO
1
0 V
AO
2 /
DO
2
PS
E+
PS
E–
AI 2
/ D
I 5
1 2 3 4 5 6 7 8 9 10 11 12 13
4电气安装端子操作模式的信号端子总览(不带控制器 / 网关的 LTP的内部斜坡控制)
操作手册补充文件 – MOVITRAC® LTX伺服模块 15
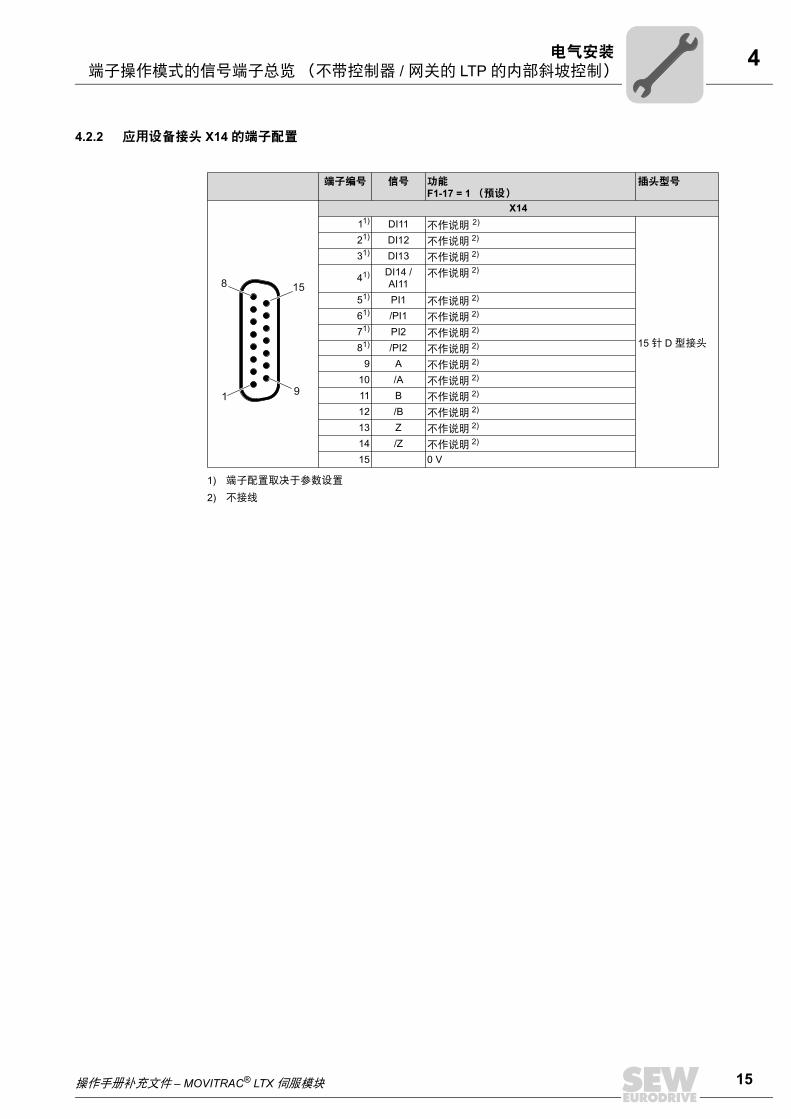
4.2.2 应用设备接头 X14的端子配置
端子编号 信号 功能F1-17 = 1(预设)
插头型号
X14
11)
1) 端子配置取决于参数设置
DI11 不作说明 2)
2) 不接线
15针 D型接头
21) DI12 不作说明 2)
31) DI13 不作说明 2)
41) DI14 / AI11
不作说明 2)
51) PI1 不作说明 2)
61) /PI1 不作说明 2)
71) PI2 不作说明 2)
81) /PI2 不作说明 2)
9 A 不作说明 2)
10 /A 不作说明 2)
11 B 不作说明 2)
12 /B 不作说明 2)
13 Z 不作说明 2)
14 /Z 不作说明 2)
15 0 V
9
15
1
8
4 电气安装非 SEW控制器的信号端子总览
16 操作手册补充文件 – MOVITRAC® LTX伺服模块
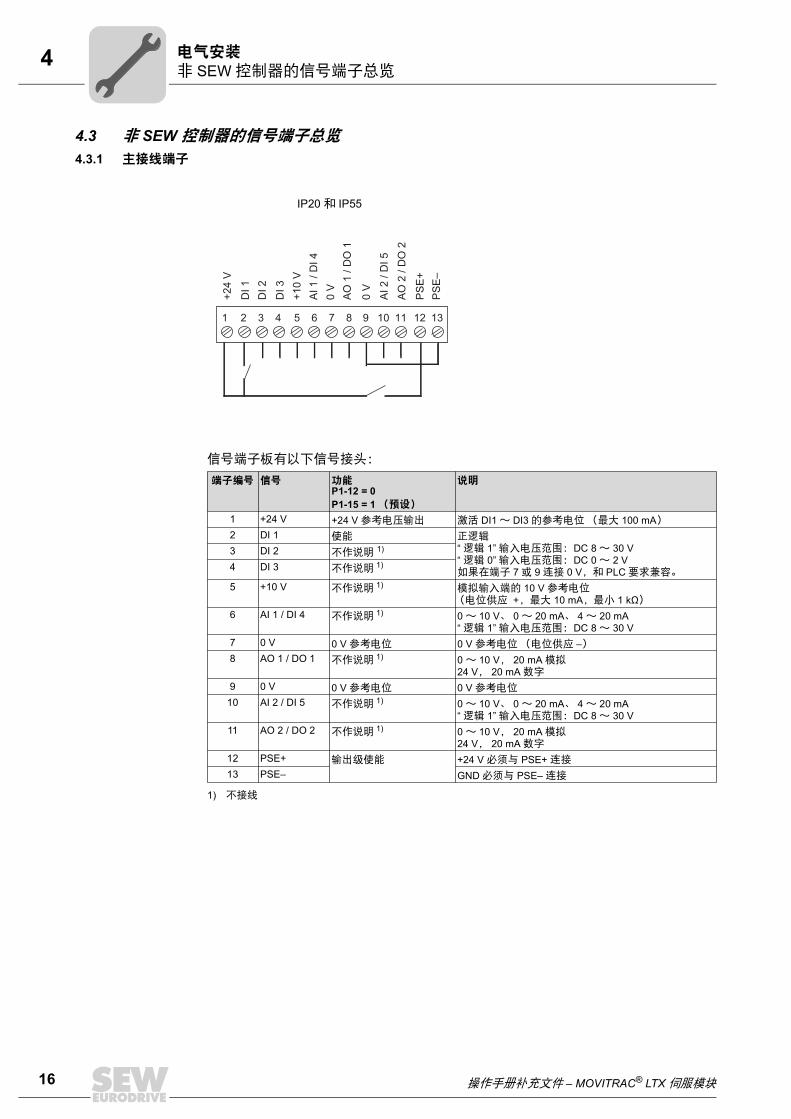
4.3 非 SEW控制器的信号端子总览
4.3.1 主接线端子
信号端子板有以下信号接头:
IP20和 IP55
端子编号 信号 功能P1-12 = 0P1-15 = 1(预设)
说明
1 +24 V +24 V参考电压输出 激活 DI1~ DI3的参考电位(最大 100 mA)
2 DI 1 使能 正逻辑“逻辑 1”输入电压范围: DC 8 ~ 30 V“逻辑 0”输入电压范围: DC 0 ~ 2 V如果在端子 7或 9连接 0 V,和 PLC要求兼容。
3 DI 2 不作说明 1)
1) 不接线
4 DI 3 不作说明 1)
5 +10 V 不作说明 1) 模拟输入端的 10 V参考电位(电位供应 +,最大 10 mA,最小 1 kΩ)
6 AI 1 / DI 4 不作说明 1) 0 ~ 10 V、 0 ~ 20 mA、 4 ~ 20 mA“逻辑 1”输入电压范围: DC 8 ~ 30 V
7 0 V 0 V参考电位 0 V参考电位(电位供应 –)
8 AO 1 / DO 1 不作说明 1) 0 ~ 10 V, 20 mA模拟24 V, 20 mA数字
9 0 V 0 V参考电位 0 V参考电位
10 AI 2 / DI 5 不作说明 1) 0 ~ 10 V、 0 ~ 20 mA、 4 ~ 20 mA“逻辑 1”输入电压范围: DC 8 ~ 30 V
11 AO 2 / DO 2 不作说明 1) 0 ~ 10 V, 20 mA模拟24 V, 20 mA数字
12 PSE+ 输出级使能 +24 V必须与 PSE+ 连接
13 PSE– GND必须与 PSE– 连接
+24
V
DI 1
DI 2
DI 3
+10
VA
I 1 /
DI 4
0 V
AO
1 /
DO
1
0 V
AO
2 /
DO
2
PS
E+
PS
E–
AI 2
/ D
I 5
1 2 3 4 5 6 7 8 9 10 11 12 13

4电气安装非 SEW控制器的信号端子总览
操作手册补充文件 – MOVITRAC® LTX伺服模块 17
4.3.2 应用设备接头 X14的端子配置
±10 V参考电位和编码器模拟
步进 /方向或 A/B相位接口
端子编号 信号 功能P1-17 = 5
功能P1-17 = 6
插头型号
X14
11)
1) 端子配置取决于参数设置
DI11 无 左限位开关
15针 D型接头
21) DI12 无 右限位开关
31) DI13 参考输入端的快速参考凸轮
41) DI14 / AI11
快速 + –10 V参考转速信号输入端
51) PI1 无
61) /PI1 无
71) PI2 无
81) /PI2 无
9 A 编码器模拟输出端 A
10 /A 编码器模拟输出端 /A
11 B 编码器模拟输出端 B
12 /B 编码器模拟输出端 /B
13 Z 编码器模拟 Z
14 /Z 编码器模拟 /Z
15 0 V
9
15
1
8
端子 信号 功能P1-17 = 7
功能P1-17 = 8
插头型号
X14
11)
1) 端子配置取决于参数设置
DI11 无
15针 D型接头
21) DI12 无
31) DI13 无
41) DI14 / AI11
无
51) PI1 步进输入端 A相位输入端
61) /PI1 \步进输入端 \A相位输入端
71) PI2 方向输入端 B相位输入端
81) /PI2 \方向输入端 \B相位输入端
9 A 不作说明 2)
2) 不接线
10 /A 不作说明 2)
11 B 不作说明 2)
12 /B 不作说明 2)
13 Z 不作说明 2)
14 /Z 不作说明 2)
15 0 V
9
15
1
8
4 电气安装SEW控制器的信号端子总览
18 操作手册补充文件 – MOVITRAC® LTX伺服模块
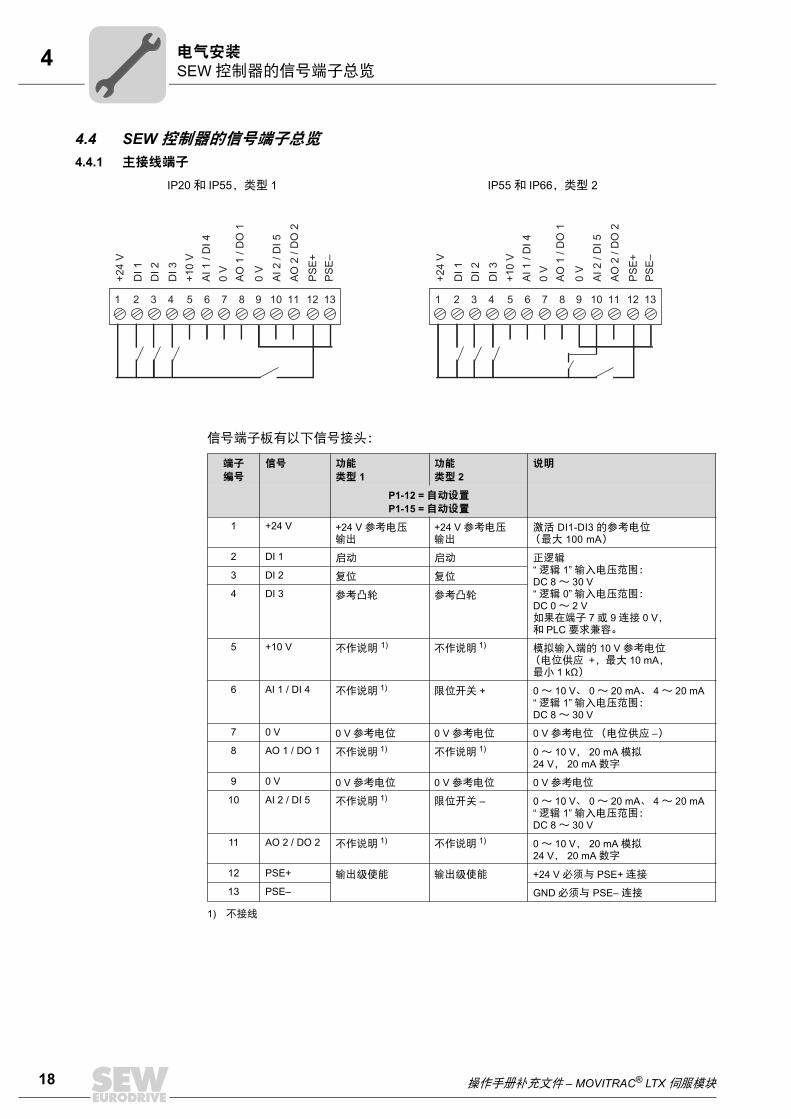
4.4 SEW控制器的信号端子总览
4.4.1 主接线端子
信号端子板有以下信号接头:
IP20和 IP55,类型 1 IP55和 IP66,类型 2
+24
V
DI 1
DI 2
DI 3
+10
VA
I 1 /
DI 4
0 V
AO
1 /
DO
1
0 V
AO
2 /
DO
2
PS
E+
PS
E–
AI 2
/ D
I 5
1 2 3 4 5 6 7 8 9 10 11 12 13
+24
V
DI 1
DI 2
DI 3
+10
VA
I 1 /
DI 4
0 V
AO
1 /
DO
1
0 V
AO
2 /
DO
2
PS
E+
PS
E–
AI 2
/ D
I 5
1 2 3 4 5 6 7 8 9 10 11 12 13
端子编号
信号 功能类型 1
功能类型 2
说明
P1-12 = 自动设置P1-15 = 自动设置
1 +24 V +24 V参考电压输出
+24 V参考电压输出
激活 DI1-DI3的参考电位(最大 100 mA)
2 DI 1 启动 启动 正逻辑“逻辑 1”输入电压范围: DC 8 ~ 30 V“逻辑 0”输入电压范围: DC 0 ~ 2 V如果在端子 7或 9连接 0 V,和 PLC要求兼容。
3 DI 2 复位 复位
4 DI 3 参考凸轮 参考凸轮
5 +10 V 不作说明 1)
1) 不接线
不作说明 1) 模拟输入端的 10 V参考电位(电位供应 +,最大 10 mA,最小 1 kΩ)
6 AI 1 / DI 4 不作说明 1) 限位开关 + 0 ~ 10 V、 0 ~ 20 mA、 4 ~ 20 mA“逻辑 1”输入电压范围: DC 8 ~ 30 V
7 0 V 0 V参考电位 0 V参考电位 0 V参考电位(电位供应 –)
8 AO 1 / DO 1 不作说明 1) 不作说明 1) 0 ~ 10 V, 20 mA模拟24 V, 20 mA数字
9 0 V 0 V参考电位 0 V参考电位 0 V参考电位
10 AI 2 / DI 5 不作说明 1) 限位开关 – 0 ~ 10 V、 0 ~ 20 mA、 4 ~ 20 mA“逻辑 1”输入电压范围: DC 8 ~ 30 V
11 AO 2 / DO 2 不作说明 1) 不作说明 1) 0 ~ 10 V, 20 mA模拟24 V, 20 mA数字
12 PSE+ 输出级使能 输出级使能 +24 V必须与 PSE+ 连接
13 PSE– GND必须与 PSE– 连接
4电气安装SEW控制器的信号端子总览
操作手册补充文件 – MOVITRAC® LTX伺服模块 19
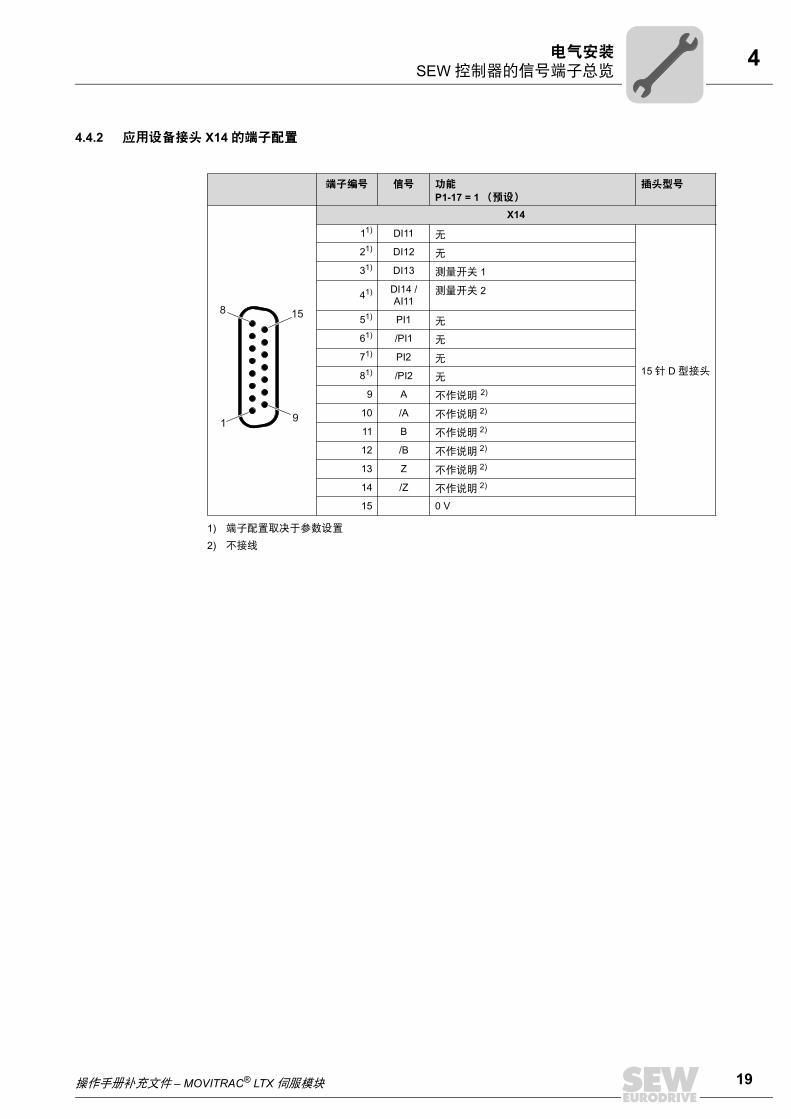
4.4.2 应用设备接头 X14的端子配置
端子编号 信号 功能P1-17 = 1(预设)
插头型号
X14
11)
1) 端子配置取决于参数设置
DI11 无
15针 D型接头
21) DI12 无
31) DI13 测量开关 1
41) DI14 / AI11
测量开关 2
51) PI1 无
61) /PI1 无
71) PI2 无
81) /PI2 无
9 A 不作说明 2)
2) 不接线
10 /A 不作说明 2)
11 B 不作说明 2)
12 /B 不作说明 2)
13 Z 不作说明 2)
14 /Z 不作说明 2)
15 0 V
9
15
1
8
4 电气安装SEW网关的信号端子总览
20 操作手册补充文件 – MOVITRAC® LTX伺服模块
4.5 SEW网关的信号端子总览
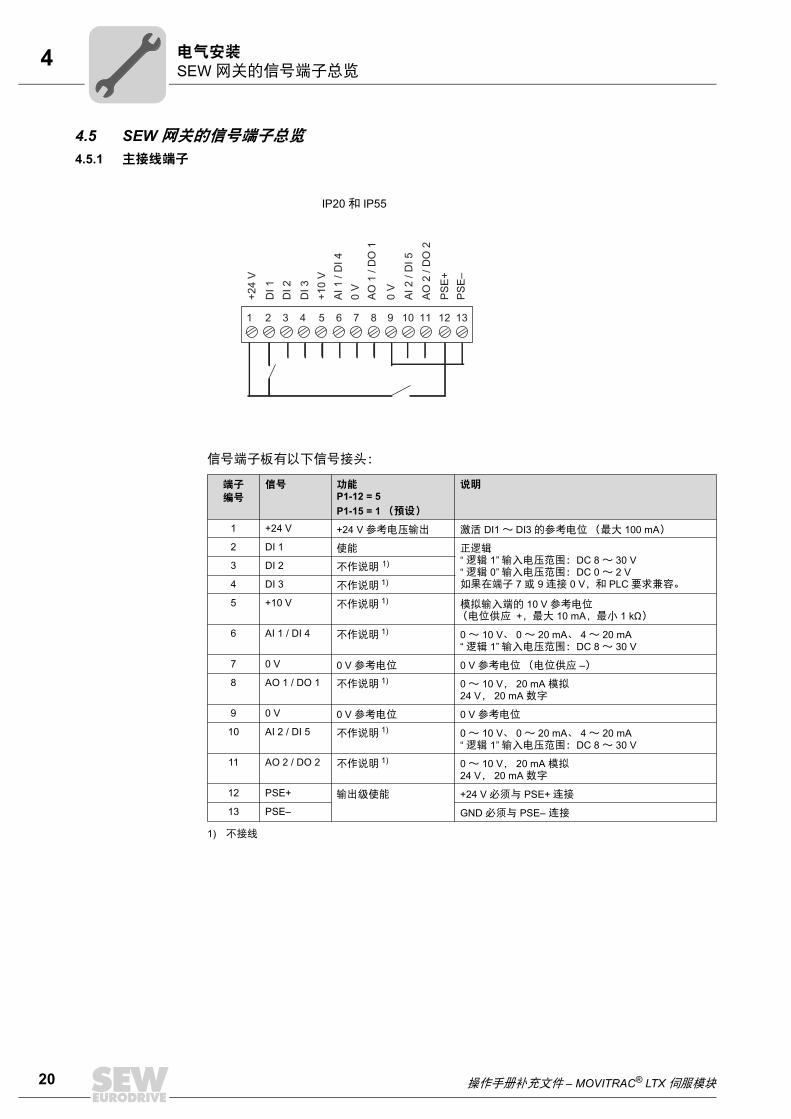
4.5.1 主接线端子
信号端子板有以下信号接头:
IP20和 IP55
端子编号
信号 功能P1-12 = 5
P1-15 = 1(预设)
说明
1 +24 V +24 V参考电压输出 激活 DI1~ DI3的参考电位(最大 100 mA)
2 DI 1 使能 正逻辑“逻辑 1”输入电压范围: DC 8 ~ 30 V“逻辑 0”输入电压范围: DC 0 ~ 2 V如果在端子 7或 9连接 0 V,和 PLC要求兼容。
3 DI 2 不作说明 1)
1) 不接线
4 DI 3 不作说明 1)
5 +10 V 不作说明 1) 模拟输入端的 10 V参考电位(电位供应 +,最大 10 mA,最小 1 kΩ)
6 AI 1 / DI 4 不作说明 1) 0 ~ 10 V、 0 ~ 20 mA、 4 ~ 20 mA“逻辑 1”输入电压范围: DC 8 ~ 30 V
7 0 V 0 V参考电位 0 V参考电位(电位供应 –)
8 AO 1 / DO 1 不作说明 1) 0 ~ 10 V, 20 mA模拟24 V, 20 mA数字
9 0 V 0 V参考电位 0 V参考电位
10 AI 2 / DI 5 不作说明 1) 0 ~ 10 V、 0 ~ 20 mA、 4 ~ 20 mA“逻辑 1”输入电压范围: DC 8 ~ 30 V
11 AO 2 / DO 2 不作说明 1) 0 ~ 10 V, 20 mA模拟24 V, 20 mA数字
12 PSE+ 输出级使能 +24 V必须与 PSE+ 连接
13 PSE– GND必须与 PSE– 连接
+24
V
DI 1
DI 2
DI 3
+10
VA
I 1 /
DI 4
0 V
AO
1 /
DO
1
0 V
AO
2 /
DO
2
PS
E+
PS
E–
AI 2
/ D
I 5
1 2 3 4 5 6 7 8 9 10 11 12 13
4电气安装SEW网关的信号端子总览
操作手册补充文件 – MOVITRAC® LTX伺服模块 21
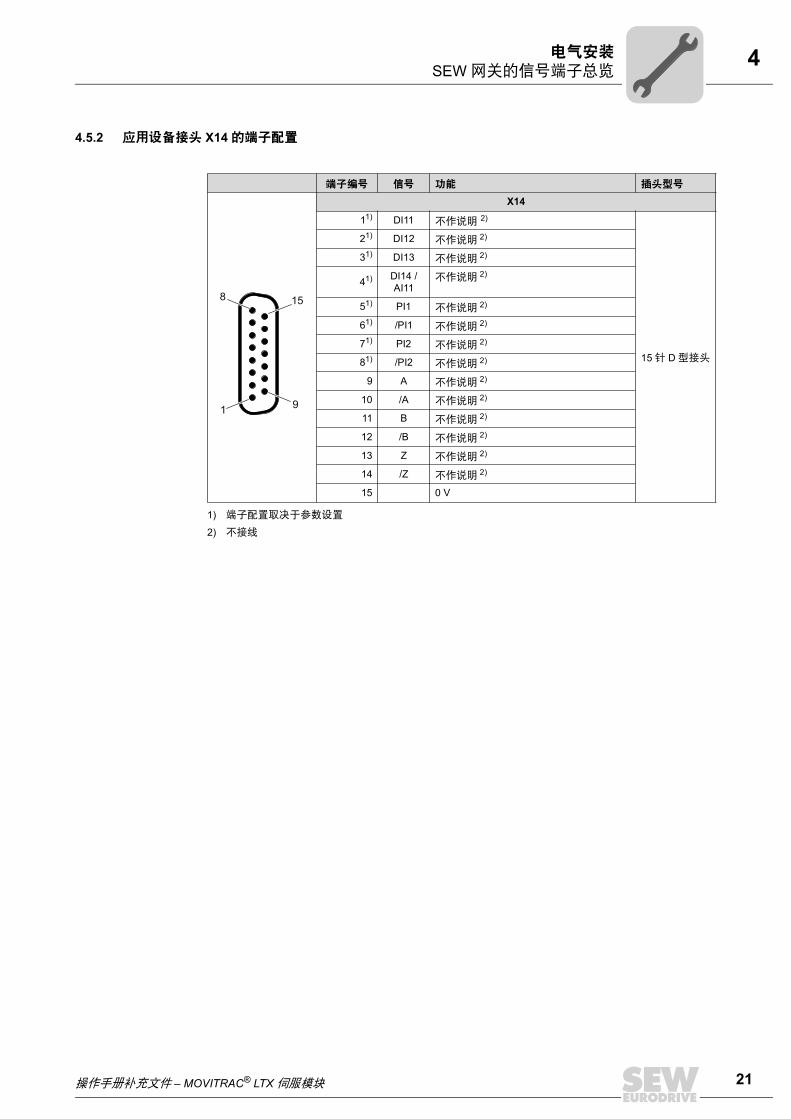
4.5.2 应用设备接头 X14的端子配置
端子编号 信号 功能 插头型号
X14
11)
1) 端子配置取决于参数设置
DI11 不作说明 2)
2) 不接线
15针 D型接头
21) DI12 不作说明 2)
31) DI13 不作说明 2)
41) DI14 / AI11
不作说明 2)
51) PI1 不作说明 2)
61) /PI1 不作说明 2)
71) PI2 不作说明 2)
81) /PI2 不作说明 2)
9 A 不作说明 2)
10 /A 不作说明 2)
11 B 不作说明 2)
12 /B 不作说明 2)
13 Z 不作说明 2)
14 /Z 不作说明 2)
15 0 V
9
15
1
8
4 电气安装继电器接线端子和 X13的总览
22 操作手册补充文件 – MOVITRAC® LTX伺服模块
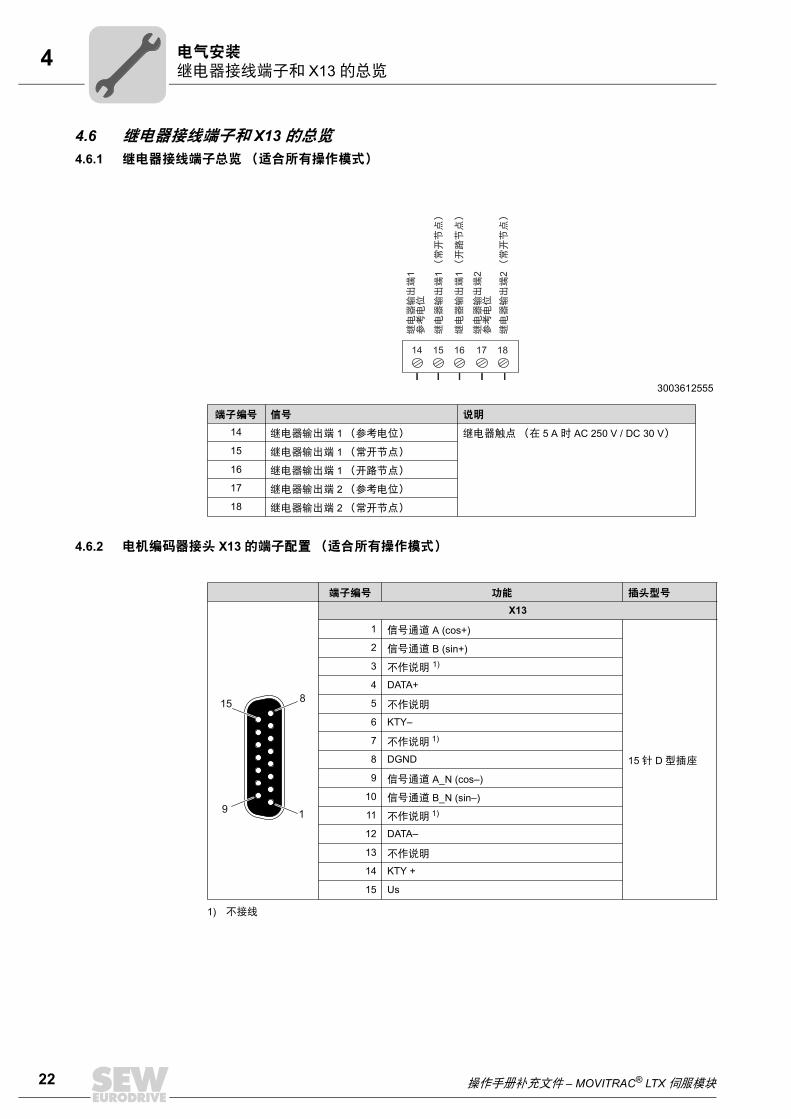
4.6 继电器接线端子和 X13的总览
4.6.1 继电器接线端子总览(适合所有操作模式)
4.6.2 电机编码器接头 X13的端子配置(适合所有操作模式)
3003612555
端子编号 信号 说明
14 继电器输出端 1(参考电位) 继电器触点(在 5 A时 AC 250 V / DC 30 V)
15 继电器输出端 1(常开节点)
16 继电器输出端 1(开路节点)
17 继电器输出端 2(参考电位)
18 继电器输出端 2(常开节点)
继电器输出端
1参考电位
继电器输出端
2参考电位
继电器输出端
1 (常开节点)
继电器输出端
2 (常开节点)
继电器输出端
1 (开路节点)
14 15 16 17 18
端子编号 功能 插头型号
X13
1 信号通道 A (cos+)
15针 D型插座
2 信号通道 B (sin+)
3 不作说明 1)
1) 不接线
4 DATA+
5 不作说明
6 KTY–
7 不作说明 1)
8 DGND
9 信号通道 A_N (cos–)
10 信号通道 B_N (sin–)
11 不作说明 1)
12 DATA–
13 不作说明
14 KTY +
15 Us
9
15
1
8
5调试用户设备接口
操作手册补充文件 – MOVITRAC® LTX伺服模块 23
5 调试
5.1 用户设备接口5.1.1 键盘
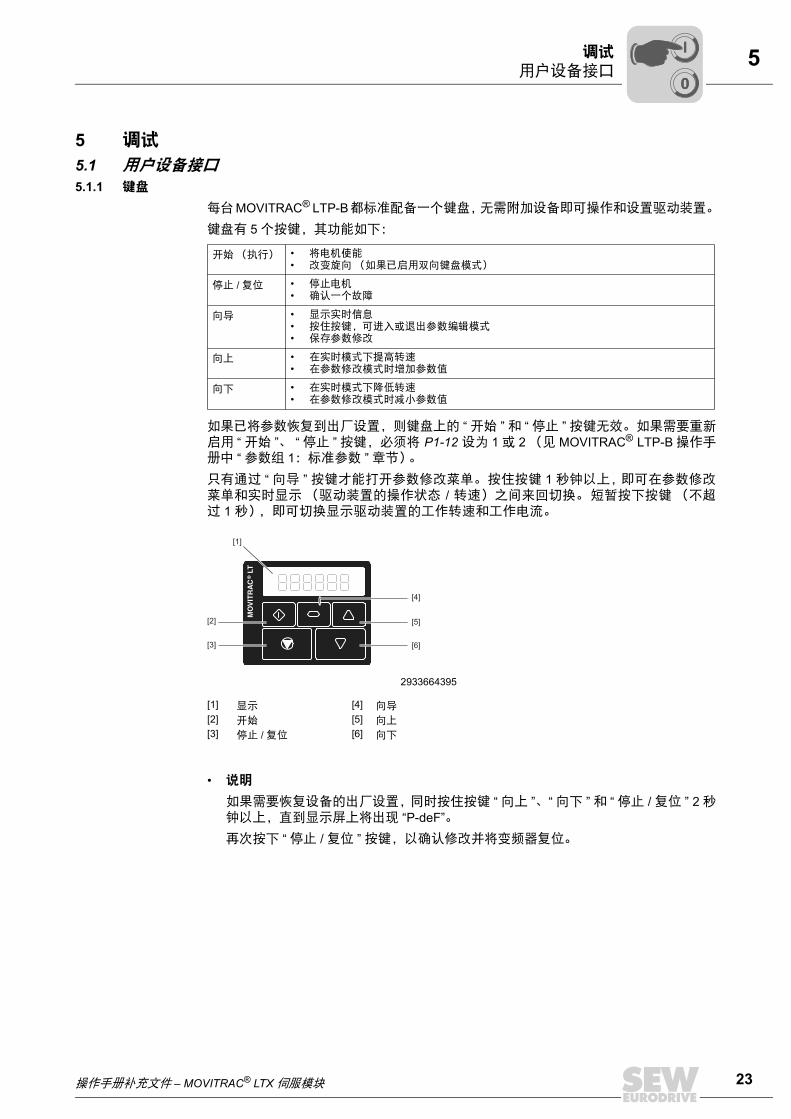
每台MOVITRAC® LTP-B都标准配备一个键盘,无需附加设备即可操作和设置驱动装置。
键盘有 5个按键,其功能如下:
如果已将参数恢复到出厂设置,则键盘上的 “开始 ”和 “停止 ”按键无效。 如果需要重新启用 “开始 ”、 “停止 ”按键,必须将 P1-12 设为 1或 2(见 MOVITRAC® LTP-B操作手册中 “参数组 1:标准参数 ”章节)。
只有通过 “向导 ”按键才能打开参数修改菜单。 按住按键 1秒钟以上,即可在参数修改菜单和实时显示(驱动装置的操作状态 / 转速)之间来回切换。 短暂按下按键(不超过 1秒),即可切换显示驱动装置的工作转速和工作电流。
• 说明
如果需要恢复设备的出厂设置,同时按住按键 “向上 ”、“向下 ”和 “停止 / 复位 ” 2秒钟以上,直到显示屏上将出现 “P-deF”。
再次按下 “停止 / 复位 ”按键,以确认修改并将变频器复位。
开始(执行) • 将电机使能• 改变旋向(如果已启用双向键盘模式)
停止 / 复位 • 停止电机• 确认一个故障
向导 • 显示实时信息• 按住按键,可进入或退出参数编辑模式• 保存参数修改
向上 • 在实时模式下提高转速• 在参数修改模式时增加参数值
向下 • 在实时模式下降低转速• 在参数修改模式时减小参数值
2933664395
[1] 显示 [4] 向导[2] 开始 [5] 向上[3] 停止 / 复位 [6] 向下
MO
VIT
RA
C® L
T
[4]
[5]
[6]
[1]
[2]
[3]
00
I
5 调试用户设备接口
24 操作手册补充文件 – MOVITRAC® LTX伺服模块
扩展按键组合
5.1.2 显示屏
每台驱动装置上都有一个 6位数 7段式显示屏,用于监控驱动装置功能和设置参数。
功能 显示屏显示内容 操作的按键 结果 举例
快速选择参数组1)
1) 必须将 P1-14 设为 “101”以启用参数组访问功能。
Px-xx “向导 ” + “向上 ” 选择高一级的参数组 • 显示屏上显示 “P110”• 按 “向导 ” + “向上 ”按键• 此时显示屏显示 “P2-01”
Px-xx “向导 ” + “向下 ” 选择低一级的参数组 • 显示屏上显示 “P226”• 按 “向导 ” + “向下 ”按键• 此时显示屏显示 “P1-01”
选择一组内最低的参数
Px-xx “向上 ” + “向下 ” 选择一个参数组内的第一个参数
• 显示屏上显示 “P110”• 按 “向上 ” + “向下 ”按键• 此时显示屏显示 “P1-01”
为参数设置最低值 数值(修改一个参数值时)
“向上 ” + “向下 ” 参数值将被设为最小值 修改参数 P1-01时:
• 显示屏上显示 “50.0”• 按 “向上 ” + “向下 ”按键• 此时显示屏显示 “0.0”
分别修改参数值的各位数
数值(修改一个参数值时)
“停止 / 复位 ” + “向导 ” 可以分别修改参数的各位数值
设置参数 P1-10时:
• 显示屏上显示 “0”• 按 “停止 / 复位 ” + “向导 ”按键• 此时显示屏显示 “_0”• 按 “向上 ”按键• 此时显示屏显示 “10”• 按 “停止 / 复位 ” + “向导 ”按键• 此时显示屏显示 “_10”• 按 “向上 ”按键• 此时显示屏显示 “110”依此类推。
00
I
5调试MOVITRAC® LTX的简单调试
操作手册补充文件 – MOVITRAC® LTX伺服模块 25
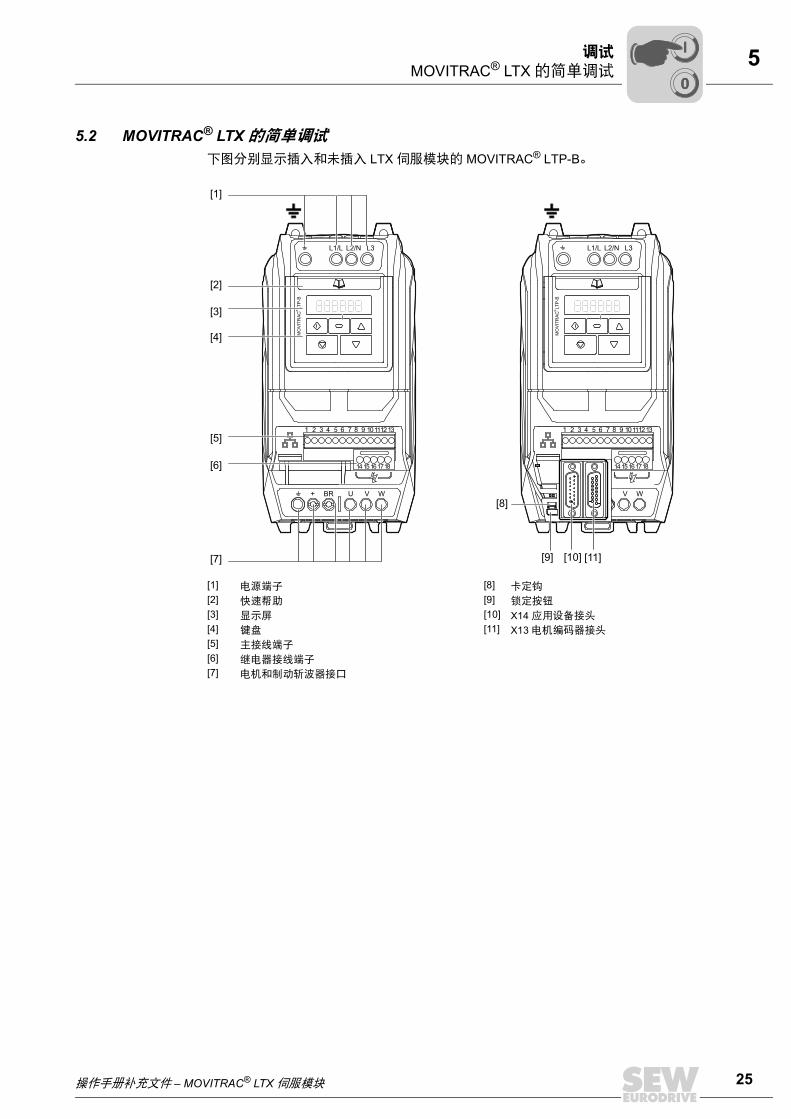
5.2 MOVITRAC® LTX的简单调试
下图分别显示插入和未插入 LTX伺服模块的 MOVITRAC® LTP-B。
[1] 电源端子 [8] 卡定钩[2] 快速帮助 [9] 锁定按钮[3] 显示屏 [10] X14 应用设备接头[4] 键盘 [11] X13 电机编码器接头[5] 主接线端子[6] 继电器接线端子[7] 电机和制动斩波器接口
+
L1/L L2/N L3
BR U V W
MO
VIT
RA
C® L
TP-B
[1]
[2]
[3]
[4]
[5]
[6]
[7]
+
L1/L L2/N L3
BR U V W
MO
VIT
RA
C® L
TP-B
[10] [11]
[8]
[9]
00
I
5 调试MOVITRAC® LTX的简单调试
26 操作手册补充文件 – MOVITRAC® LTX伺服模块
5.2.1 在根据操作模式进行调试前的基本接线和设置
• 用一根预制的 SEW电机电缆将 CMP电机连接到电机接口 [7] 上。
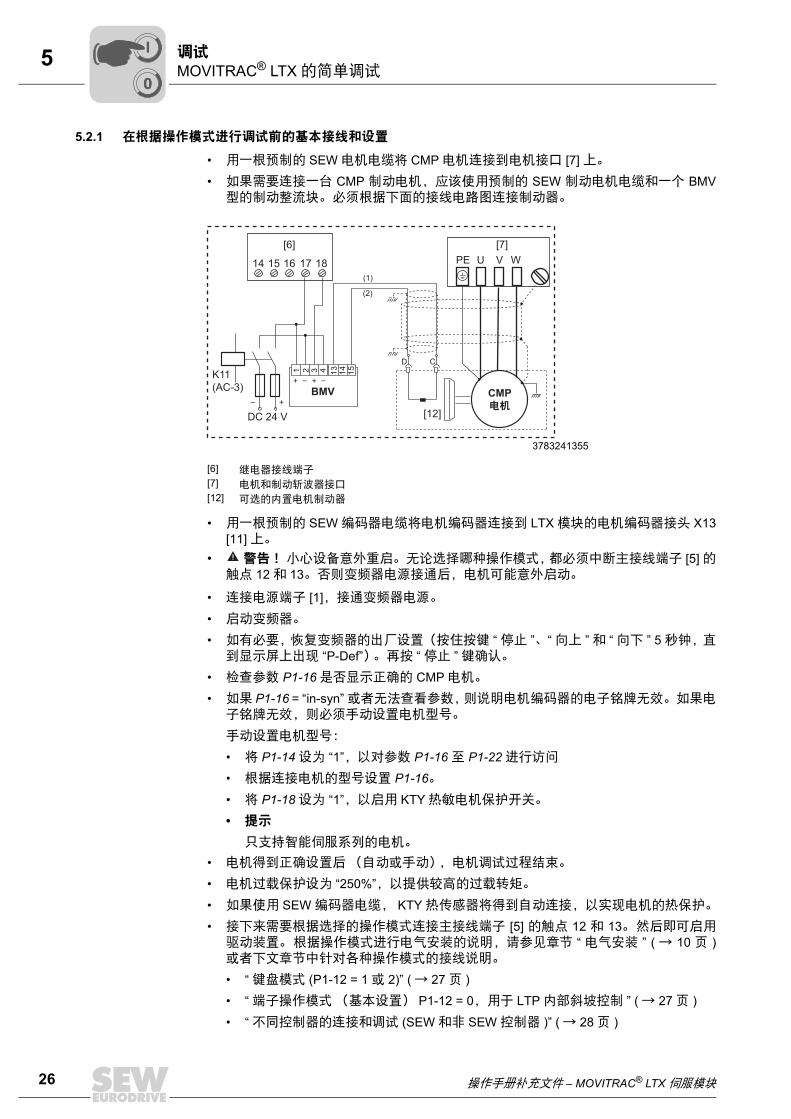
• 如果需要连接一台 CMP 制动电机,应该使用预制的 SEW 制动电机电缆和一个 BMV型的制动整流块。 必须根据下面的接线电路图连接制动器。
• 用一根预制的 SEW编码器电缆将电机编码器连接到 LTX模块的电机编码器接头 X13[11] 上。
• 警告! 小心设备意外重启。 无论选择哪种操作模式,都必须中断主接线端子 [5] 的触点 12和 13。 否则变频器电源接通后,电机可能意外启动。
• 连接电源端子 [1],接通变频器电源。
• 启动变频器。
• 如有必要,恢复变频器的出厂设置(按住按键 “停止 ”、“向上 ”和 “向下 ” 5秒钟,直到显示屏上出现 “P-Def”)。 再按 “停止 ”键确认。
• 检查参数 P1-16 是否显示正确的 CMP电机。
• 如果 P1-16 = “in-syn”或者无法查看参数,则说明电机编码器的电子铭牌无效。 如果电子铭牌无效,则必须手动设置电机型号。
手动设置电机型号:
• 将 P1-14 设为 “1”,以对参数 P1-16 至 P1-22 进行访问
• 根据连接电机的型号设置 P1-16。
• 将 P1-18 设为 “1”,以启用 KTY热敏电机保护开关。
• 提示
只支持智能伺服系列的电机。
• 电机得到正确设置后(自动或手动),电机调试过程结束。
• 电机过载保护设为 “250%”,以提供较高的过载转矩。
• 如果使用 SEW编码器电缆, KTY热传感器将得到自动连接,以实现电机的热保护。
• 接下来需要根据选择的操作模式连接主接线端子 [5] 的触点 12 和 13。 然后即可启用驱动装置。 根据操作模式进行电气安装的说明,请参见章节 “电气安装 ” (→ 10页 )或者下文章节中针对各种操作模式的接线说明。
• “键盘模式 (P1-12 = 1或 2)” (→ 27页 )
• “端子操作模式(基本设置) P1-12 = 0,用于 LTP内部斜坡控制 ” (→ 27页 )
• “不同控制器的连接和调试 (SEW和非 SEW控制器 )” (→ 28页 )
3783241355
[6] 继电器接线端子[7] 电机和制动斩波器接口[12] 可选的内置电机制动器
CMP电机
PE U V W
1 2 3 4 13 14 15
BMV
DC 24 V
K11(AC-3)
D
– +
C
14 15 16 17 18
+ – –+
[6] [7]
[12]
(1)
(2)
00
I
5调试MOVITRAC® LTX的简单调试
操作手册补充文件 – MOVITRAC® LTX伺服模块 27
• 警告! 小心电击! 接线不规范可能导致受高压电击的危险。
• 提示
采用变频器的转速和位置控制标准参数时,所有的智能伺服系列电机均可正常工作。首次进行简单的控制优化时,可以对参数 P1-22 进行修改。 参数 P1-22 表示总惯性(J外部 = J负载 + J变速器)和电机惯性(J电机 或 J制动电机)之间的比例。
转速和位置控制的其它优化途径,请参见章节 “ 不同操作模式下的控制回路优化 ”(→ 31页 )。
5.2.2 键盘模式(P1-12 = 1或 2)
键盘模式下:
• 因为电气安装由具体的操作模式决定,接线说明在章节 “ 键盘模式的信号端子总览 ”(→ 12页 )中详细介绍。
• 将 P1-12 设为 “1”(单向)或 “2”(双向)。
• 在用户设备接线板的端子 1和 2之间安装一个跳线或开关,以启用电机。
• 按下 “开始 ”按键。 驱动装置启用,频率为 0.0 Hz。
• 按 “向上 ”按键,提高转速,或者按 “向下 ”按键,降低转速。
• 按 “停止 / 复位 ”按键,以停止驱动装置。
• 再次按下 “开始 ”按键,驱动装置重新恢复原来的转速。
如果启用了双向模式(P1-12 = 2),按 “开始 ”按键可以改变转向。
• 提示
在停止状态下按 “停止 / 复位 ”按键,可以预设需要的转速。 再按 “开始 ”按键,驱动装置即加速到此转速。
5.2.3 端子操作模式(基本设置) P1-12 = 0,用于 LTP内部斜坡控制
端子操作模式(基本设置)下:
• 因为电气安装由具体的操作模式决定,接线说明在章节 “端子操作模式的信号端子总览 ” (→ 14页 )中详细介绍。
• P1-12必须设为 “0”(基本设置)。
• 在用户设备接线板的端子 1和 2之间安装一个开关。
• 在端子 5、 6、 7之间连接一个电位计(1 ~ 10 k),滑动触点与插头 6相连。
• 连接端子 1和 2,启用驱动装置。
• 用电位计设置转速。
− =P JJ外部
电机
1 22
00
I
5 调试MOVITRAC® LTX的简单调试
28 操作手册补充文件 – MOVITRAC® LTX伺服模块
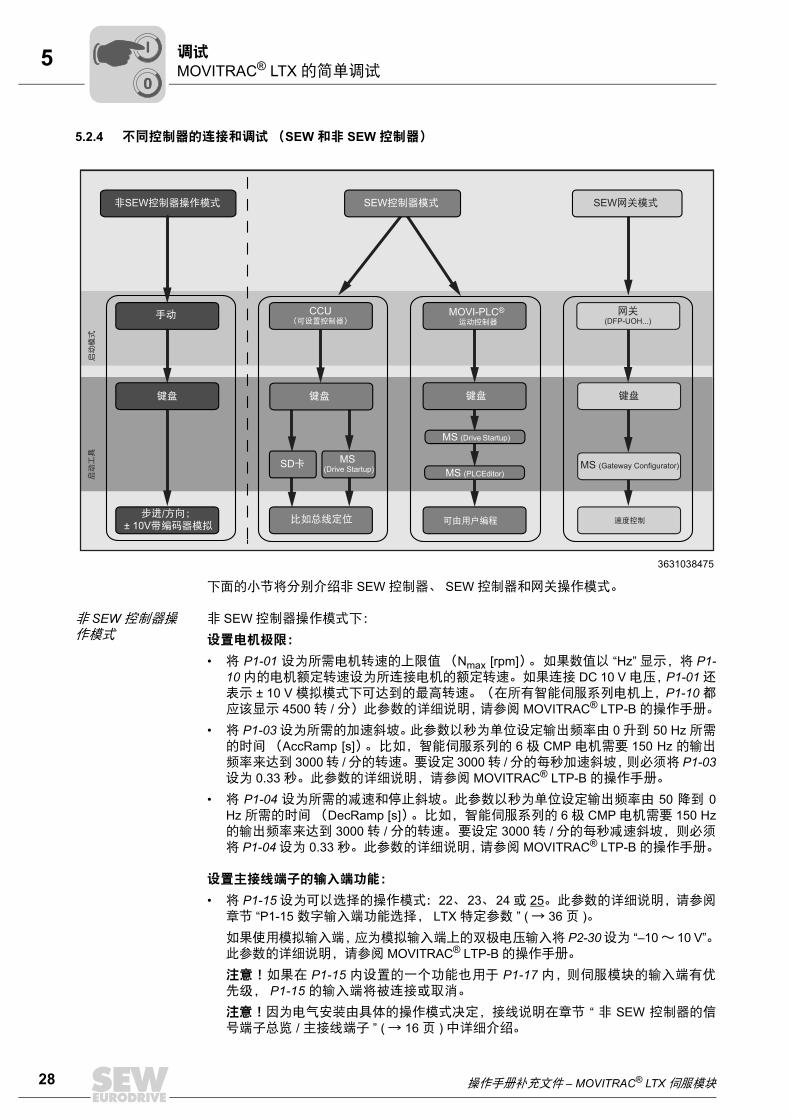
5.2.4 不同控制器的连接和调试(SEW和非 SEW控制器)
下面的小节将分别介绍非 SEW控制器、 SEW控制器和网关操作模式。
非 SEW控制器操作模式
非 SEW控制器操作模式下:
设置电机极限:
• 将 P1-01 设为所需电机转速的上限值(Nmax [rpm])。 如果数值以 “Hz”显示,将 P1-10内的电机额定转速设为所连接电机的额定转速。 如果连接 DC 10 V电压,P1-01 还表示 ± 10 V模拟模式下可达到的最高转速。 (在所有智能伺服系列电机上,P1-10 都应该显示 4500转 /分) 此参数的详细说明,请参阅 MOVITRAC® LTP-B的操作手册。
• 将 P1-03 设为所需的加速斜坡。此参数以秒为单位设定输出频率由 0升到 50 Hz所需的时间(AccRamp [s])。 比如,智能伺服系列的 6极 CMP电机需要 150 Hz的输出频率来达到 3000转 /分的转速。 要设定 3000转 /分的每秒加速斜坡,则必须将 P1-03设为 0.33秒。 此参数的详细说明,请参阅 MOVITRAC® LTP-B的操作手册。
• 将 P1-04 设为所需的减速和停止斜坡。此参数以秒为单位设定输出频率由 50 降到 0Hz所需的时间(DecRamp [s])。 比如,智能伺服系列的 6极 CMP电机需要 150 Hz的输出频率来达到 3000转 /分的转速。 要设定 3000转 /分的每秒减速斜坡,则必须将 P1-04 设为 0.33秒。 此参数的详细说明,请参阅 MOVITRAC® LTP-B的操作手册。
设置主接线端子的输入端功能:
• 将 P1-15 设为可以选择的操作模式: 22、23、24或 25。 此参数的详细说明,请参阅章节 “P1-15数字输入端功能选择, LTX特定参数 ” (→ 36页 )。
如果使用模拟输入端,应为模拟输入端上的双极电压输入将 P2-30 设为 “–10 ~ 10 V”。此参数的详细说明,请参阅 MOVITRAC® LTP-B的操作手册。
注意!如果在 P1-15 内设置的一个功能也用于 P1-17 内,则伺服模块的输入端有优先级, P1-15 的输入端将被连接或取消。
注意!因为电气安装由具体的操作模式决定,接线说明在章节 “ 非 SEW 控制器的信号端子总览 / 主接线端子 ” (→ 16页 )中详细介绍。
3631038475
启动模式
启动工具
非SEW控制器操作模式
键盘
手动
步进/方向;± 10V带编码器模拟 速度控制
CCU(可设置控制器)
可由用户编程
MS (PLCEditor)
比如总线定位
网关(DFP-UOH...)
MOVI-PLC® 运动控制器
键盘
MS (Drive Startup)
键盘
MS (Gateway Configurator)
SEW网关模式SEW控制器模式
键盘
SD卡 MS(Drive Startup)
00
I
5调试MOVITRAC® LTX的简单调试
操作手册补充文件 – MOVITRAC® LTX伺服模块 29
设置伺服模块的输入端功能:
应该在需要参考凸轮或一个快速模拟输入端时,使用伺服模块输入端。 这样,步进和方向控制功能或编码器输入端功能也得到启用。
• 将 P1-17 设为可以选择的操作模式: 5、6、7或 8。 此参数的详细说明,请参阅章节“P1-17智能伺服操作 ” (→ 39页 )。
如果使用模拟输入端,应为模拟输入端上的双极电压输入将 P2-30 设为 “–10 ~ 10 V”。此参数的详细说明,请参阅 MOVITRAC® LTP-B的操作手册。
注意!如果在 P1-15 内设置的一个功能也用于 P1-17 内,则伺服模块的输入端有优先级, P1-15 的输入端将被连接或取消。
注意!因为电气安装由具体的操作模式决定,接线说明在章节 “应用设备接头 X14的端子配置 ” (→ 17页 )中详细介绍。
• 警告! 小心电击! 接线不规范可能在启用电机、驱动装置时导致高压电击的危险。
• 驱动调整的详细信息,请参阅章节“使用非SEW控制器时的控制回路优化” (→ 31页)。
SEW控制器模式 使用一个带 CCU或 MOVI-PLC® 的 SEW控制器的操作模式(通过 “驱动设置向导 ”进行设置):
• 在 P1-19 内设置需要的驱动装置地址(1 ~ 63)。
• 在 P1-20 内设置需要的波特率(125、 250、 500、 1000 kBaud)。 如果采用 CCU操作模式,必须将波特率设为 500 kBaud。
• 这两个参数的详细说明,请参阅 MOVITRAC® LTP-B的操作手册。
• MOVITOOLS® MotionStudio的网络视图显示 LTX变频器与 SEW控制器相连。 点击鼠标右键打开上下文菜单,选择 “DriveStartUpLTX”。 用 MOVITOOLS® MotionStudio 执行一次网络扫描。
• 按照提示操作,并在MOVITOOLS® MotionStudio内的“驱动设置软件”进行必要的设置。
• 注意!因为电气安装由具体的操作模式决定,接线说明在章节 “SEW控制器的信号端子总览 ” (→ 18页 )中详细介绍。
• 警告! 小心电击! 接线不规范可能在启用电机或驱动装置时导致高压电击的危险。
• 驱动调整的详细信息,请参阅章节 “使用SEW控制器时的控制回路优化 ” (→ 33页 )。
SEW网关操作模式 直接连接现场总线(通过网关)的操作模式下:
设置电机极限
• 将参数 P1-01 设为所需电机转速的上限值(Nmax [rpm])。 如果数值以 “Hz”显示,将P1-10 内的电机额定转速设为所连接电机的额定转速。 P1-01 也显示网关操作时可达到的最高转速。 定标: 0x4000 = 100% 最高转速(P-01 的设置)。 高于 0x4000或低于 0xC000的数值将被限制为 0x4000 / 0xC000。 (在所有智能伺服系列电机上,P1-10都应该显示4500转 /分) 此参数的详细说明,请参阅MOVITRAC® LTP-B的操作手册。
• 将参数 P1-03 设为所需的加速斜坡。此参数以秒为单位设定输出频率由 0升到 50 Hz所需的时间(AccRamp [s])。 比如,智能伺服系列的 6极 CMP电机需要 150 Hz的输出频率来达到 3000转 /分的转速。 要设定 3000转 /分的每秒加速斜坡,则必须将P1-03 设为 0.33秒。 此参数的详细说明,请参阅 MOVITRAC® LTP-B的操作手册。
• 将参数 P1-04 设为所需的减速和停止斜坡。此参数以秒为单位设定输出频率由 50 降到 0 Hz所需的时间(DecRamp [s])。
比如,智能伺服系列的 6极 CMP电机需要 150 Hz的输出频率来达到 3000转 /分的转速。 要设定 3000转 /分的每秒减速斜坡,则必须将 P1-04 设为 0.33秒。 此参数的详细说明,请参阅 MOVITRAC® LTP-B的操作手册。
00
I
5 调试软件
30 操作手册补充文件 – MOVITRAC® LTX伺服模块
控制信号源的设置
• 将参数 P1-12 设为 “5”,也就是通过 SBus MOVILINK® 和网关进行控制。 此参数的详细说明,请参阅 MOVITRAC® LTP-B的操作手册。
通讯参数的设置
• 将 P1-14 设为 “101”以对参数进行调用。
此参数的详细说明,请参阅 MOVITRAC® LTP-B的操作手册。
• 在 P5-01 内设置需要的驱动装置地址(1 ~ 63)。
此参数的详细说明,请参阅 MOVITRAC® LTP-B的操作手册。
• 在 P5-02 内设置需要的波特率(125、250、500、1000 kBaud)。 如果采用网关操作模式,必须将参数设为 500 kBaud。
此参数的详细说明,请参阅 MOVITRAC® LTP-B的操作手册。
• 根据所需的 “通讯中断反应 ”设置 P5-05。 (0 = 报告故障并停止,1 = 报告故障并减速停止, 2 = 减速停止但不报告故障、 3 = 预设的转速 8)。
此参数的详细说明,请参阅 MOVITRAC® LTP-B的操作手册。
• 将 P5-06 设置为所需的 “通讯中断超时 ”(0.0 ~ 1.0 ~ 5.0秒)。 在此设置的时间(以秒为单位)结束后,变频器将按 P5-05 的设置做出反应。 如果设为 “0.0秒 ”,则变频器即使在通讯中断的情况下也将保持实际速度。
此参数的详细说明,请参阅 MOVITRAC® LTP-B的操作手册。
• 通过 P5-07 选用 “内部或外部 ”斜坡。 通过参数可以选用内部或外部斜坡控制。 如果选择 “启用 ”,变频器将根据 MOVILINK® 过程数据定义的外部斜坡进行控制(PO3)。(0 = 禁用, 1 = 启用)。
此参数的详细说明,请参阅 MOVITRAC® LTP-B的操作手册。
• 注意!因为电气安装由具体的操作模式决定,接线说明在章节 “SEW网关的信号端子总览 ” (→ 20页 )中详细介绍。
• 警告! 小心电击! 接线不规范可能在启用电机、驱动装置时导致高压电击的危险。
• 驱动调整的详细信息,请参阅章节 “网关操作模式时的控制回路优化 ” (→ 34页 )。
5.3 软件5.3.1 Modbus控制
使用 LTX模块时不能进行 Modbus控制。
00
I
5调试不同操作模式下的控制回路优化
操作手册补充文件 – MOVITRAC® LTX伺服模块 31
5.4 不同操作模式下的控制回路优化5.4.1 使用非 SEW控制器时的控制回路优化
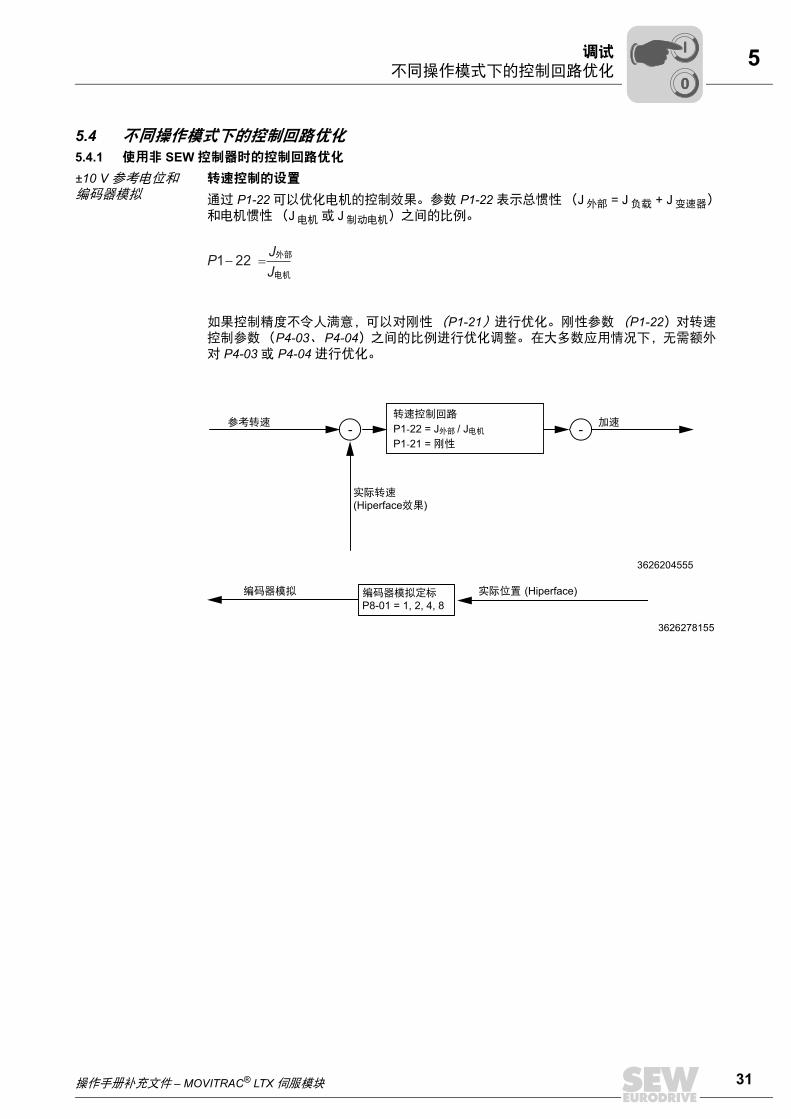
±10 V参考电位和编码器模拟
转速控制的设置
通过 P1-22 可以优化电机的控制效果。 参数 P1-22 表示总惯性(J外部 = J负载 + J变速器)和电机惯性(J电机 或 J制动电机)之间的比例。
如果控制精度不令人满意,可以对刚性(P1-21)进行优化。 刚性参数(P1-22)对转速控制参数(P4-03、P4-04)之间的比例进行优化调整。 在大多数应用情况下,无需额外对 P4-03 或 P4-04 进行优化。
3626204555
3626278155
− =P JJ外部
电机
1 22
参考转速转速控制回路
P1-22 = J外部 / J电机P1-21 = 刚性
-
实际转速(Hiperface效果)
- 加速
编码器模拟定标P8-01 = 1, 2, 4, 8
实际位置 (Hiperface)编码器模拟
00
I
5 调试不同操作模式下的控制回路优化
32 操作手册补充文件 – MOVITRAC® LTX伺服模块
步进 /方向接口(A/B相位)
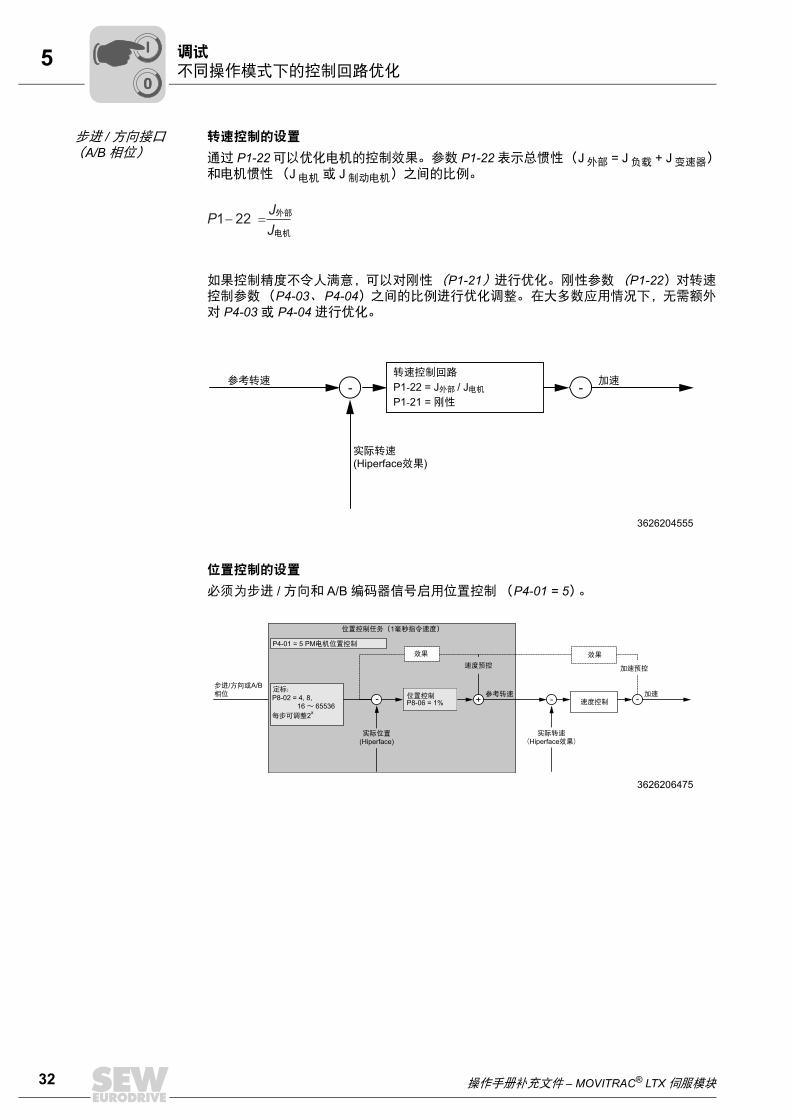
转速控制的设置
通过 P1-22 可以优化电机的控制效果。 参数 P1-22 表示总惯性(J外部 = J负载 + J变速器)和电机惯性(J电机 或 J制动电机)之间的比例。
如果控制精度不令人满意,可以对刚性(P1-21)进行优化。 刚性参数(P1-22)对转速控制参数(P4-03、P4-04)之间的比例进行优化调整。 在大多数应用情况下,无需额外对 P4-03 或 P4-04 进行优化。
位置控制的设置
必须为步进 /方向和 A/B编码器信号启用位置控制(P4-01 = 5)。
3626204555
3626206475
− =P JJ外部
电机
1 22
参考转速转速控制回路
P1-22 = J外部 / J电机P1-21 = 刚性
-
实际转速(Hiperface效果)
- 加速
位置控制任务(1毫秒指令速度)
效果
位置控制P8-06 = 1%- + 速度控制-
效果
- 加速定标:P8-02 = 4, 8, 16 ~ 65536 每步可调整2x
步进/方向或A/B相位
P4-01 = 5 PM电机位置控制
速度预控
参考转速
加速预控
实际位置(Hiperface)
实际转速(Hiperface效果)
00
I
5调试不同操作模式下的控制回路优化
操作手册补充文件 – MOVITRAC® LTX伺服模块 33
5.4.2 使用 SEW控制器时的控制回路优化
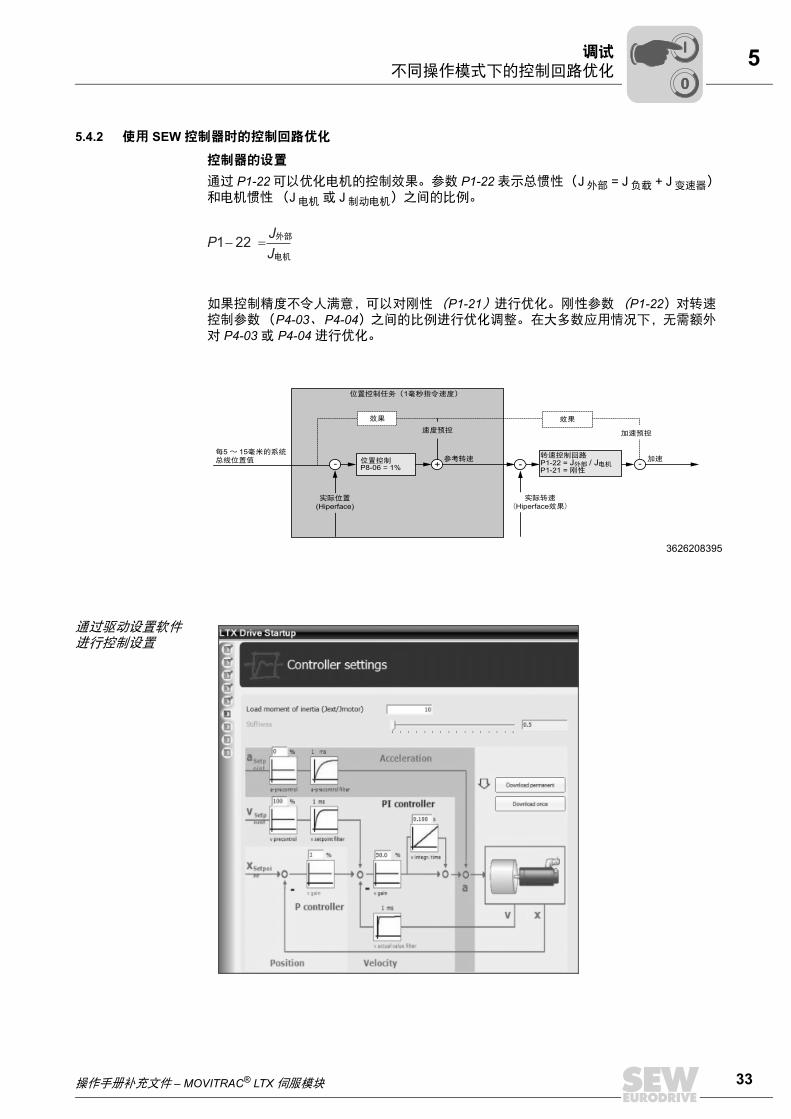
控制器的设置
通过 P1-22 可以优化电机的控制效果。 参数 P1-22 表示总惯性(J外部 = J负载 + J变速器)和电机惯性(J电机 或 J制动电机)之间的比例。
如果控制精度不令人满意,可以对刚性(P1-21)进行优化。 刚性参数(P1-22)对转速控制参数(P4-03、P4-04)之间的比例进行优化调整。 在大多数应用情况下,无需额外对 P4-03 或 P4-04 进行优化。
通过驱动设置软件进行控制设置
3626208395
− =P JJ外部
电机
1 22
位置控制任务(1毫秒指令速度)
效果
位置控制P8-06 = 1%- + -
效果
- 加速
速度预控
参考转速
加速预控
实际位置(Hiperface)
实际转速(Hiperface效果)
每5 ~ 15毫米的系统总线位置值
转速控制回路P1-22 = J外部 / J电机P1-21 = 刚性
00
I
5 调试不同操作模式下的控制回路优化
34 操作手册补充文件 – MOVITRAC® LTX伺服模块
5.4.3 网关操作模式的控制回路优化
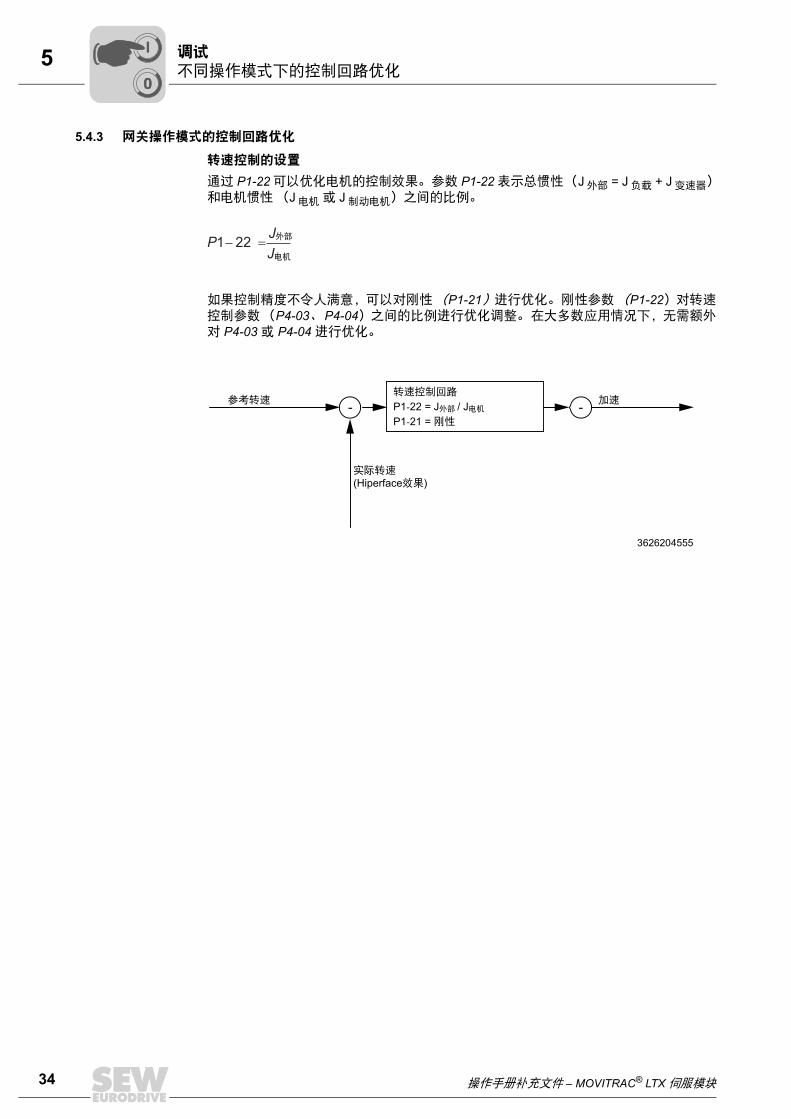
转速控制的设置
通过 P1-22 可以优化电机的控制效果。 参数 P1-22 表示总惯性(J外部 = J负载 + J变速器)和电机惯性(J电机 或 J制动电机)之间的比例。
如果控制精度不令人满意,可以对刚性(P1-21)进行优化。 刚性参数(P1-22)对转速控制参数(P4-03、P4-04)之间的比例进行优化调整。 在大多数应用情况下,无需额外对 P4-03 或 P4-04 进行优化。
3626204555
− =P JJ外部
电机
1 22
参考转速转速控制回路
P1-22 = J外部 / J电机P1-21 = 刚性
-
实际转速(Hiperface效果)
- 加速
00
I
6参数LTX特定参数(界面 1)
操作手册补充文件 – MOVITRAC® LTX伺服模块 35
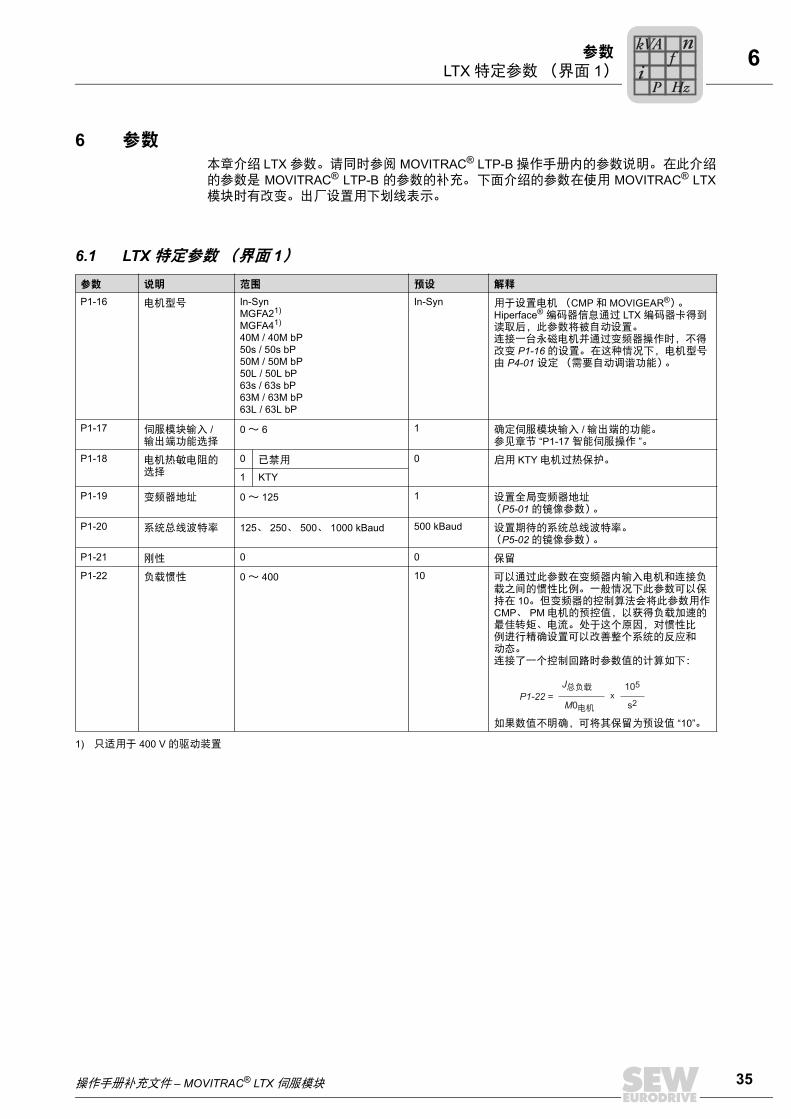
6 参数本章介绍 LTX参数。 请同时参阅 MOVITRAC® LTP-B操作手册内的参数说明。 在此介绍的参数是 MOVITRAC® LTP-B 的参数的补充。 下面介绍的参数在使用 MOVITRAC® LTX模块时有改变。 出厂设置用下划线表示。
6.1 LTX特定参数(界面 1)
参数 说明 范围 预设 解释
P1-16 电机型号 In-SynMGFA21)
MGFA41)
40M / 40M bP50s / 50s bP50M / 50M bP50L / 50L bP63s / 63s bP63M / 63M bP63L / 63L bP
1) 只适用于 400 V的驱动装置
In-Syn 用于设置电机(CMP和 MOVIGEAR®)。 Hiperface® 编码器信息通过 LTX编码器卡得到读取后,此参数将被自动设置。连接一台永磁电机并通过变频器操作时,不得改变 P1-16 的设置。 在这种情况下,电机型号由 P4-01 设定(需要自动调谐功能)。
P1-17 伺服模块输入 /输出端功能选择
0 ~ 6 1 确定伺服模块输入 /输出端的功能。参见章节 “P1-17智能伺服操作 ”。
P1-18 电机热敏电阻的选择
0 已禁用 0 启用 KTY电机过热保护。
1 KTY
P1-19 变频器地址 0 ~ 125 1 设置全局变频器地址(P5-01 的镜像参数)。
P1-20 系统总线波特率 125、 250、 500、 1000 kBaud 500 kBaud 设置期待的系统总线波特率。(P5-02 的镜像参数)。
P1-21 刚性 0 0 保留
P1-22 负载惯性 0 ~ 400 10 可以通过此参数在变频器内输入电机和连接负载之间的惯性比例。 一般情况下此参数可以保持在 10。 但变频器的控制算法会将此参数用作CMP、 PM电机的预控值,以获得负载加速的最佳转矩、电流。 处于这个原因,对惯性比例进行精确设置可以改善整个系统的反应和动态。连接了一个控制回路时参数值的计算如下:
如果数值不明确,可将其保留为预设值 “10”。
P1-22 = J总负载
M0电机
105
s2x
Pi
fkVA
Hz
n
6 参数P1-14 扩展参数调用
36 操作手册补充文件 – MOVITRAC® LTX伺服模块
6.2 P1-14 扩展参数调用
输入范围: 0 ~ 30000
通过此参数可以对标准参数以外的其它参数组进行访问(参数 P1-01 ~ P1-15)。 以下输入的数值有效时,即可对参数进行访问。
• 0 / P1-01 ~ P1-15
• 1 / P1-01 ~ P1-22
• 101 / P1-01 ~ P5-08
• 201 / P1-01 ~ P8-15
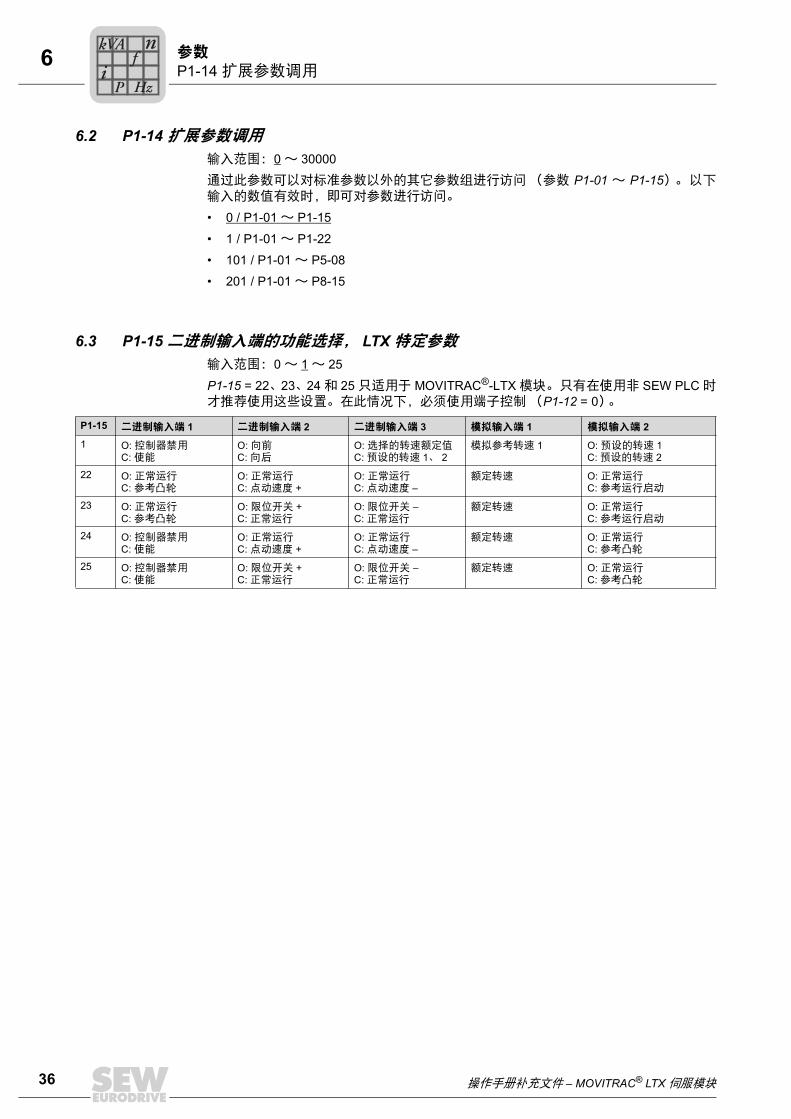
6.3 P1-15二进制输入端的功能选择, LTX特定参数
输入范围: 0 ~ 1 ~ 25
P1-15 = 22、23、24和 25只适用于 MOVITRAC®-LTX模块。 只有在使用非 SEW PLC时才推荐使用这些设置。 在此情况下,必须使用端子控制(P1-12 = 0)。
P1-15 二进制输入端 1 二进制输入端 2 二进制输入端 3 模拟输入端 1 模拟输入端 2
1 O: 控制器禁用C: 使能
O: 向前C: 向后
O: 选择的转速额定值C: 预设的转速 1、 2
模拟参考转速 1 O: 预设的转速 1C: 预设的转速 2
22 O: 正常运行C: 参考凸轮
O: 正常运行C: 点动速度 +
O: 正常运行C: 点动速度 –
额定转速 O: 正常运行C: 参考运行启动
23 O: 正常运行C: 参考凸轮
O: 限位开关 +C: 正常运行
O: 限位开关 –C: 正常运行
额定转速 O: 正常运行C: 参考运行启动
24 O: 控制器禁用C: 使能
O: 正常运行C: 点动速度 +
O: 正常运行C: 点动速度 –
额定转速 O: 正常运行C: 参考凸轮
25 O: 控制器禁用C: 使能
O: 限位开关 +C: 正常运行
O: 限位开关 –C: 正常运行
额定转速 O: 正常运行C: 参考凸轮
Pi
fkVA
Hz
n
6参数P1-15二进制输入端的功能选择, LTX特定参数
操作手册补充文件 – MOVITRAC® LTX伺服模块 37
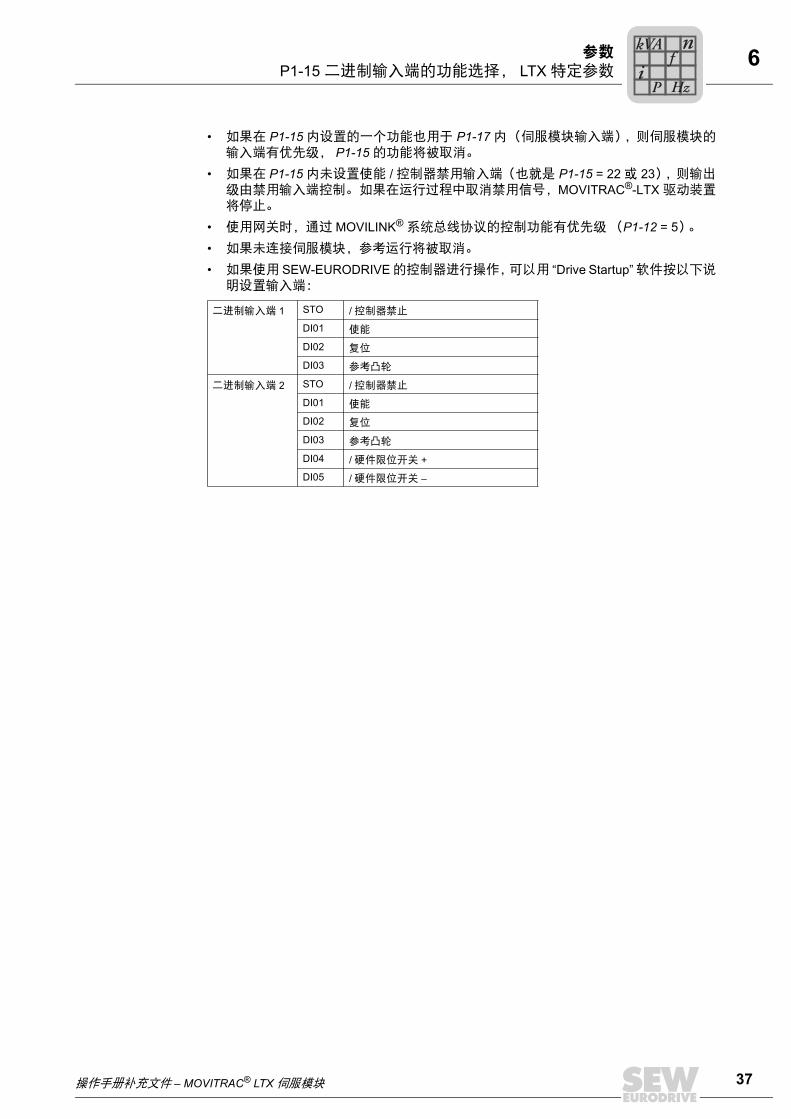
• 如果在 P1-15 内设置的一个功能也用于 P1-17 内(伺服模块输入端),则伺服模块的输入端有优先级, P1-15 的功能将被取消。
• 如果在 P1-15 内未设置使能 /控制器禁用输入端(也就是 P1-15 = 22或 23),则输出级由禁用输入端控制。 如果在运行过程中取消禁用信号,MOVITRAC®-LTX驱动装置将停止。
• 使用网关时,通过 MOVILINK® 系统总线协议的控制功能有优先级(P1-12 = 5)。
• 如果未连接伺服模块,参考运行将被取消。
• 如果使用 SEW-EURODRIVE的控制器进行操作,可以用 “Drive Startup”软件按以下说明设置输入端:
二进制输入端 1 STO /控制器禁止
DI01 使能
DI02 复位
DI03 参考凸轮
二进制输入端 2 STO /控制器禁止
DI01 使能
DI02 复位
DI03 参考凸轮
DI04 /硬件限位开关 +
DI05 /硬件限位开关 –
Pi
fkVA
Hz
n
6 参数P1-16 电机型号
38 操作手册补充文件 – MOVITRAC® LTX伺服模块
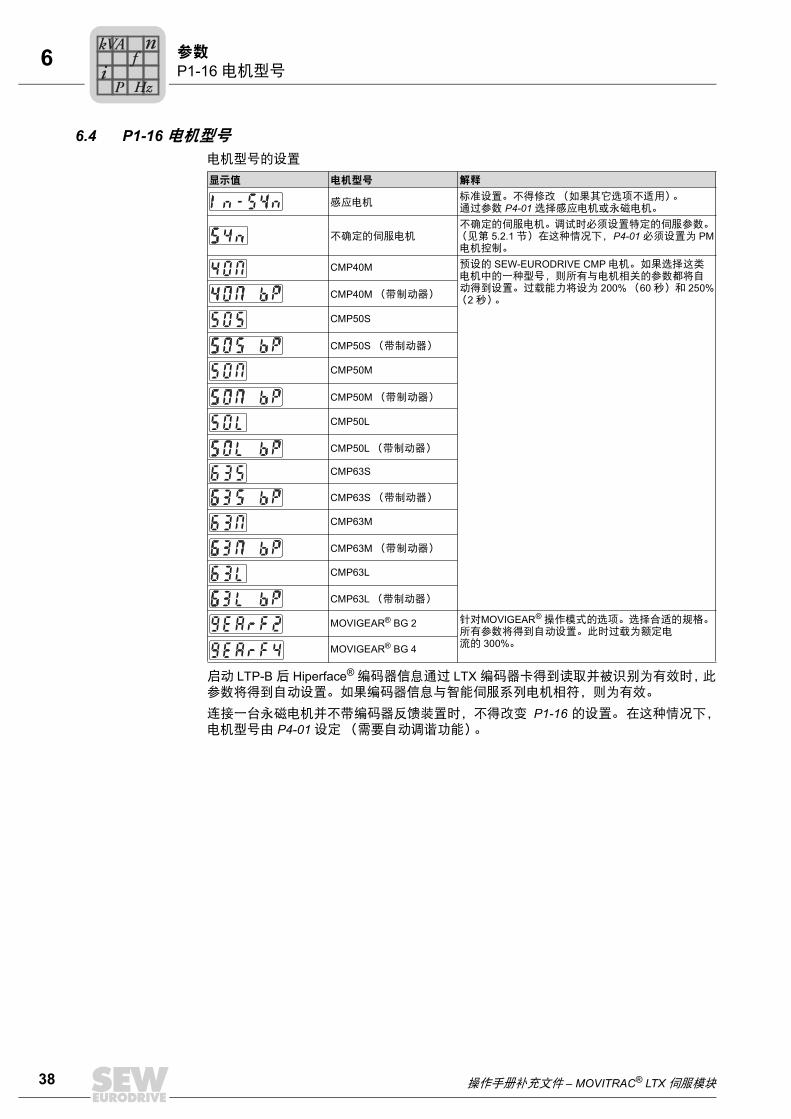
6.4 P1-16 电机型号
电机型号的设置
启动 LTP-B后 Hiperface® 编码器信息通过 LTX编码器卡得到读取并被识别为有效时,此参数将得到自动设置。 如果编码器信息与智能伺服系列电机相符,则为有效。
连接一台永磁电机并不带编码器反馈装置时,不得改变 P1-16 的设置。 在这种情况下,电机型号由 P4-01 设定(需要自动调谐功能)。
显示值 电机型号 解释
感应电机标准设置。 不得修改(如果其它选项不适用)。通过参数 P4-01 选择感应电机或永磁电机。
不确定的伺服电机不确定的伺服电机。 调试时必须设置特定的伺服参数。 (见第 5.2.1节) 在这种情况下,P4-01 必须设置为 PM电机控制。
CMP40M 预设的 SEW-EURODRIVE CMP电机。 如果选择这类电机中的一种型号,则所有与电机相关的参数都将自动得到设置。 过载能力将设为 200%(60秒)和 250%(2秒)。
CMP40M(带制动器)
CMP50S
CMP50S(带制动器)
CMP50M
CMP50M(带制动器)
CMP50L
CMP50L(带制动器)
CMP63S
CMP63S(带制动器)
CMP63M
CMP63M(带制动器)
CMP63L
CMP63L(带制动器)
MOVIGEAR® BG 2 针对MOVIGEAR® 操作模式的选项。 选择合适的规格。 所有参数将得到自动设置。 此时过载为额定电流的 300%。MOVIGEAR® BG 4
Pi
fkVA
Hz
n
6参数P1-17 智能伺服操作
操作手册补充文件 – MOVITRAC® LTX伺服模块 39
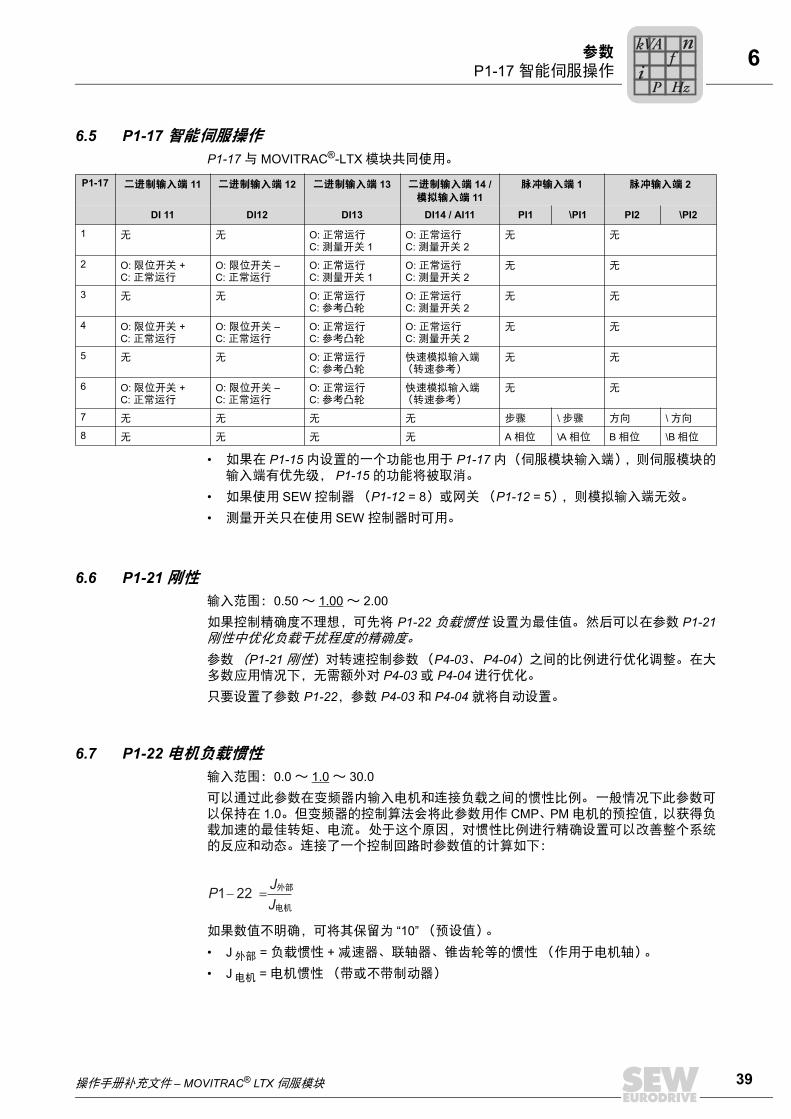
6.5 P1-17 智能伺服操作
P1-17 与 MOVITRAC®-LTX模块共同使用。
• 如果在 P1-15 内设置的一个功能也用于 P1-17 内(伺服模块输入端),则伺服模块的输入端有优先级, P1-15 的功能将被取消。
• 如果使用 SEW控制器(P1-12 = 8)或网关(P1-12 = 5),则模拟输入端无效。
• 测量开关只在使用 SEW控制器时可用。
6.6 P1-21 刚性
输入范围: 0.50 ~ 1.00 ~ 2.00
如果控制精确度不理想,可先将 P1-22 负载惯性 设置为最佳值。 然后可以在参数 P1-21刚性中优化负载干扰程度的精确度。
参数(P1-21 刚性)对转速控制参数(P4-03、P4-04)之间的比例进行优化调整。 在大多数应用情况下,无需额外对 P4-03 或 P4-04 进行优化。
只要设置了参数 P1-22,参数 P4-03 和 P4-04 就将自动设置。
6.7 P1-22 电机负载惯性
输入范围: 0.0 ~ 1.0 ~ 30.0
可以通过此参数在变频器内输入电机和连接负载之间的惯性比例。 一般情况下此参数可以保持在 1.0。 但变频器的控制算法会将此参数用作 CMP、PM电机的预控值,以获得负载加速的最佳转矩、电流。 处于这个原因,对惯性比例进行精确设置可以改善整个系统的反应和动态。 连接了一个控制回路时参数值的计算如下:
如果数值不明确,可将其保留为 “10”(预设值)。
• J外部 = 负载惯性 + 减速器、联轴器、锥齿轮等的惯性(作用于电机轴)。
• J电机 = 电机惯性(带或不带制动器)
P1-17 二进制输入端 11 二进制输入端 12 二进制输入端 13 二进制输入端 14 / 模拟输入端 11
脉冲输入端 1 脉冲输入端 2
DI 11 DI12 DI13 DI14 / AI11 PI1 \PI1 PI2 \PI2
1 无 无 O: 正常运行C: 测量开关 1
O: 正常运行C: 测量开关 2
无 无
2 O: 限位开关 +C: 正常运行
O: 限位开关 –C: 正常运行
O: 正常运行C: 测量开关 1
O: 正常运行C: 测量开关 2
无 无
3 无 无 O: 正常运行C: 参考凸轮
O: 正常运行C: 测量开关 2
无 无
4 O: 限位开关 +C: 正常运行
O: 限位开关 –C: 正常运行
O: 正常运行C: 参考凸轮
O: 正常运行C: 测量开关 2
无 无
5 无 无 O: 正常运行C: 参考凸轮
快速模拟输入端(转速参考)
无 无
6 O: 限位开关 +C: 正常运行
O: 限位开关 –C: 正常运行
O: 正常运行C: 参考凸轮
快速模拟输入端(转速参考)
无 无
7 无 无 无 无 步骤 \步骤 方向 \方向
8 无 无 无 无 A相位 \A相位 B相位 \B相位
− =P JJ外部
电机
1 22
Pi
fkVA
Hz
n
6 参数P2-01 预设转速 1
40 操作手册补充文件 – MOVITRAC® LTX伺服模块
6.8 P2-01 预设转速 1
输入范围: –P1-01 – 5.0 Hz – P1-01
也用于点动运行加速和减速。
6.9 P2-05 预设转速 5
输入范围: –P1-01 – 0.0 Hz – P1-01
也用于参考运行的定位速度。
6.10 P2-06 预设转速 6
输入范围: –P1-01 – 0.0 Hz – P1-01
也用于参考运行的自由运行速度。
6.11 LTX功能参数组(界面 3)
6.11.1 P8-01 模拟编码器定标
输入范围: 1, 2, 4, 8
P8-01 × 2 × 编码器系统的增量 = 每转的输出脉冲
如果 P8-01 = 1,则每转的模拟编码器脉冲次数与编码器系统相符(xx0H = 128次脉冲,xx1H = 1024次脉冲)。 详细说明请参阅章节 5.4.1 “转速控制的设置 ”。
6.11.2 P8-02 步进 /方向或 A/B相位输入端每转的脉冲数
输入范围: 4, 8 ~ 32768, 65536
P8-02 用于确定电机每转一周在 LTX模块输入端 X14上产生的脉冲次数。 到达的脉冲直接进入位置控制装置。 见章节 5.4.1“位置控制的设置 ”。
为了实现与 P8-01、P8-02 和 AK0H编码器系统的主站从站位置耦合,必须将 P8-01 设为“1”, P8-02 设为 “256”。
6.11.3 P8-03 / P8-04 位置偏差的动作极限值
输入范围: 0, 1 ,2 ~ 65535, 6536 P8-03 低字
输入范围: 0, 1, 2 ~ 65535, 65536 P8-04 高字
P8-02 包含一个位置偏差的动作极限值。 位置偏差直接由位置控制器计算。 将 P8-03 和P8-04 设为 “0”,可以取消位置偏差功能。
详细说明请参阅章节 “位置控制的设置 ”。
Pi
fkVA
Hz
n
6参数LTX功能参数组(界面 3)
操作手册补充文件 – MOVITRAC® LTX伺服模块 41
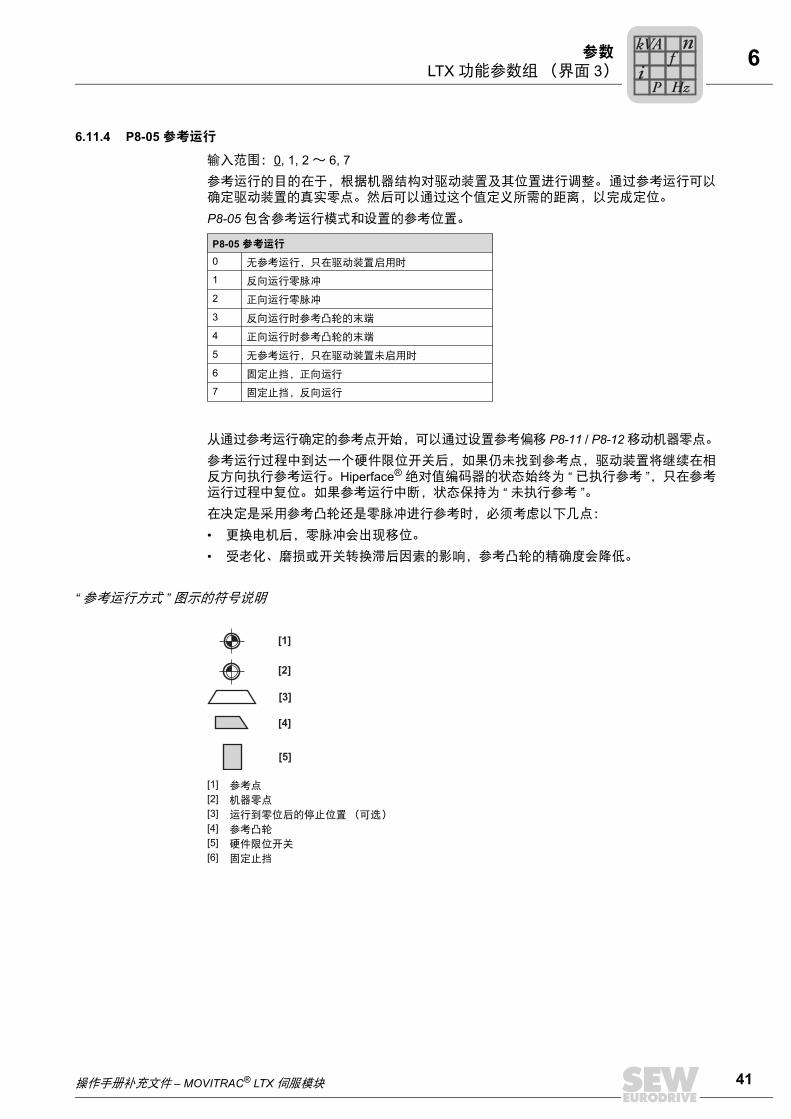
6.11.4 P8-05 参考运行
输入范围: 0, 1, 2 ~ 6, 7
参考运行的目的在于,根据机器结构对驱动装置及其位置进行调整。 通过参考运行可以确定驱动装置的真实零点。 然后可以通过这个值定义所需的距离,以完成定位。
P8-05 包含参考运行模式和设置的参考位置。
从通过参考运行确定的参考点开始,可以通过设置参考偏移 P8-11 / P8-12 移动机器零点。
参考运行过程中到达一个硬件限位开关后,如果仍未找到参考点,驱动装置将继续在相反方向执行参考运行。 Hiperface® 绝对值编码器的状态始终为 “已执行参考 ”,只在参考运行过程中复位。 如果参考运行中断,状态保持为 “未执行参考 ”。
在决定是采用参考凸轮还是零脉冲进行参考时,必须考虑以下几点:
• 更换电机后,零脉冲会出现移位。
• 受老化、磨损或开关转换滞后因素的影响,参考凸轮的精确度会降低。
“参考运行方式 ”图示的符号说明
P8-05 参考运行
0 无参考运行,只在驱动装置启用时
1 反向运行零脉冲
2 正向运行零脉冲
3 反向运行时参考凸轮的末端
4 正向运行时参考凸轮的末端
5 无参考运行,只在驱动装置未启用时
6 固定止挡,正向运行
7 固定止挡,反向运行
[1] 参考点[2] 机器零点[3] 运行到零位后的停止位置(可选)[4] 参考凸轮[5] 硬件限位开关[6] 固定止挡
[1]
[2]
[3]
[4]
[5]
Pi
fkVA
Hz
n
6 参数LTX功能参数组(界面 3)
42 操作手册补充文件 – MOVITRAC® LTX伺服模块
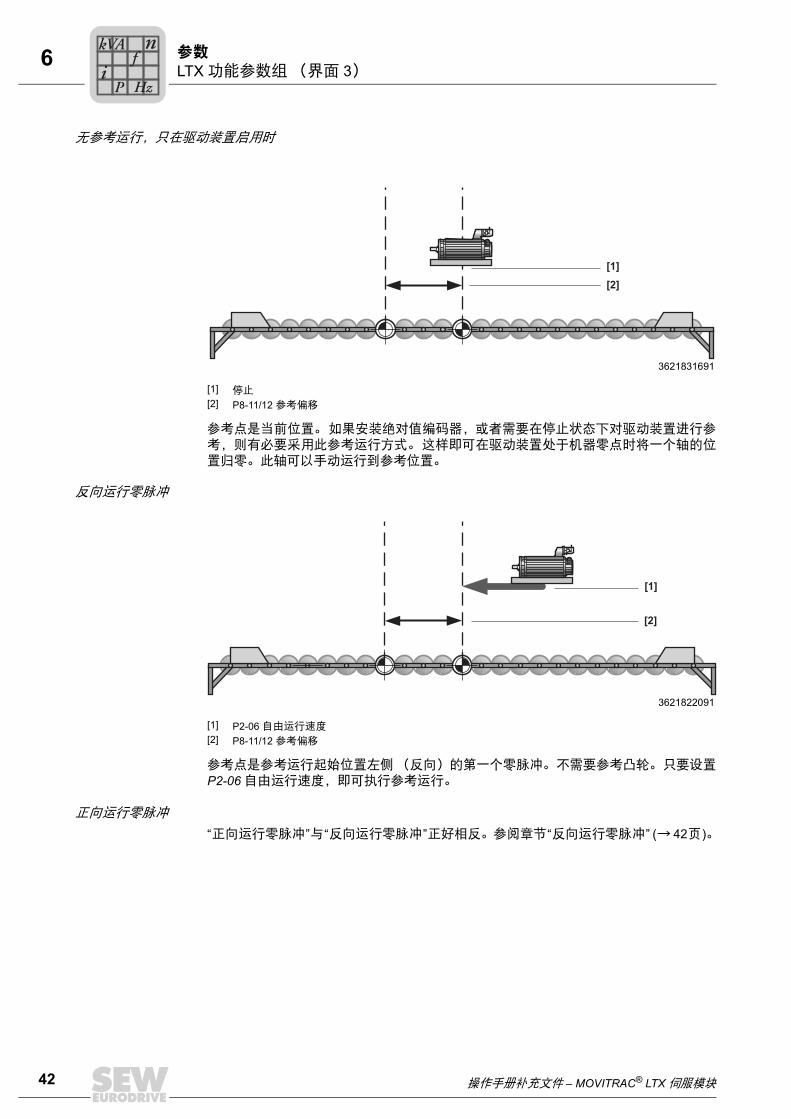
无参考运行,只在驱动装置启用时
参考点是当前位置。 如果安装绝对值编码器,或者需要在停止状态下对驱动装置进行参考,则有必要采用此参考运行方式。 这样即可在驱动装置处于机器零点时将一个轴的位置归零。 此轴可以手动运行到参考位置。
反向运行零脉冲
参考点是参考运行起始位置左侧(反向)的第一个零脉冲。 不需要参考凸轮。 只要设置P2-06 自由运行速度,即可执行参考运行。
正向运行零脉冲
“正向运行零脉冲”与“反向运行零脉冲”正好相反。 参阅章节“反向运行零脉冲” (→ 42页)。
3621831691
[1] 停止[2] P8-11/12 参考偏移
[1]
[2]
3621822091
[1] P2-06 自由运行速度[2] P8-11/12 参考偏移
[1]
[2]
Pi
fkVA
Hz
n
6参数LTX功能参数组(界面 3)
操作手册补充文件 – MOVITRAC® LTX伺服模块 43
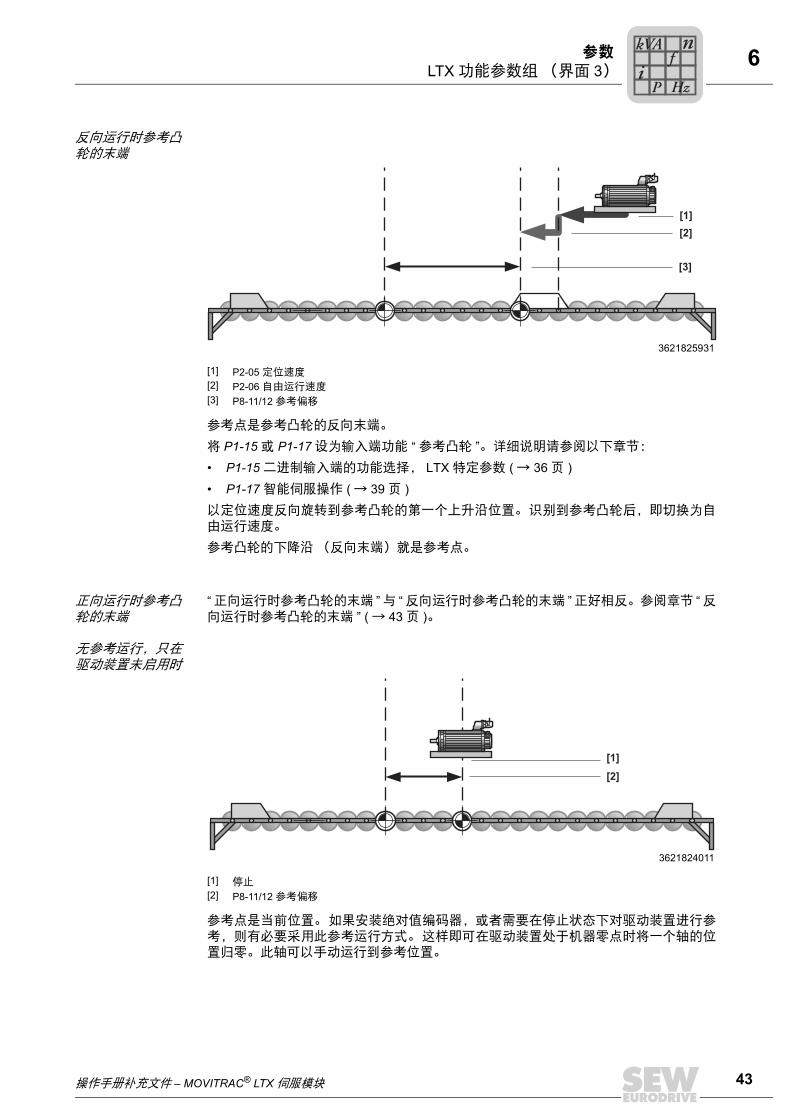
反向运行时参考凸轮的末端
参考点是参考凸轮的反向末端。
将 P1-15 或 P1-17 设为输入端功能 “参考凸轮 ”。 详细说明请参阅以下章节:
• P1-15 二进制输入端的功能选择, LTX特定参数 (→ 36页 )
• P1-17 智能伺服操作 (→ 39页 )
以定位速度反向旋转到参考凸轮的第一个上升沿位置。 识别到参考凸轮后,即切换为自由运行速度。
参考凸轮的下降沿(反向末端)就是参考点。
正向运行时参考凸轮的末端
“正向运行时参考凸轮的末端 ”与 “反向运行时参考凸轮的末端 ”正好相反。 参阅章节 “反向运行时参考凸轮的末端 ” (→ 43页 )。
无参考运行,只在驱动装置未启用时
参考点是当前位置。 如果安装绝对值编码器,或者需要在停止状态下对驱动装置进行参考,则有必要采用此参考运行方式。 这样即可在驱动装置处于机器零点时将一个轴的位置归零。 此轴可以手动运行到参考位置。
3621825931
[1] P2-05 定位速度[2] P2-06 自由运行速度[3] P8-11/12 参考偏移
[1][2]
[3]
3621824011
[1] 停止[2] P8-11/12 参考偏移
[1]
[2]
Pi
fkVA
Hz
n
6 参数LTX功能参数组(界面 3)
44 操作手册补充文件 – MOVITRAC® LTX伺服模块
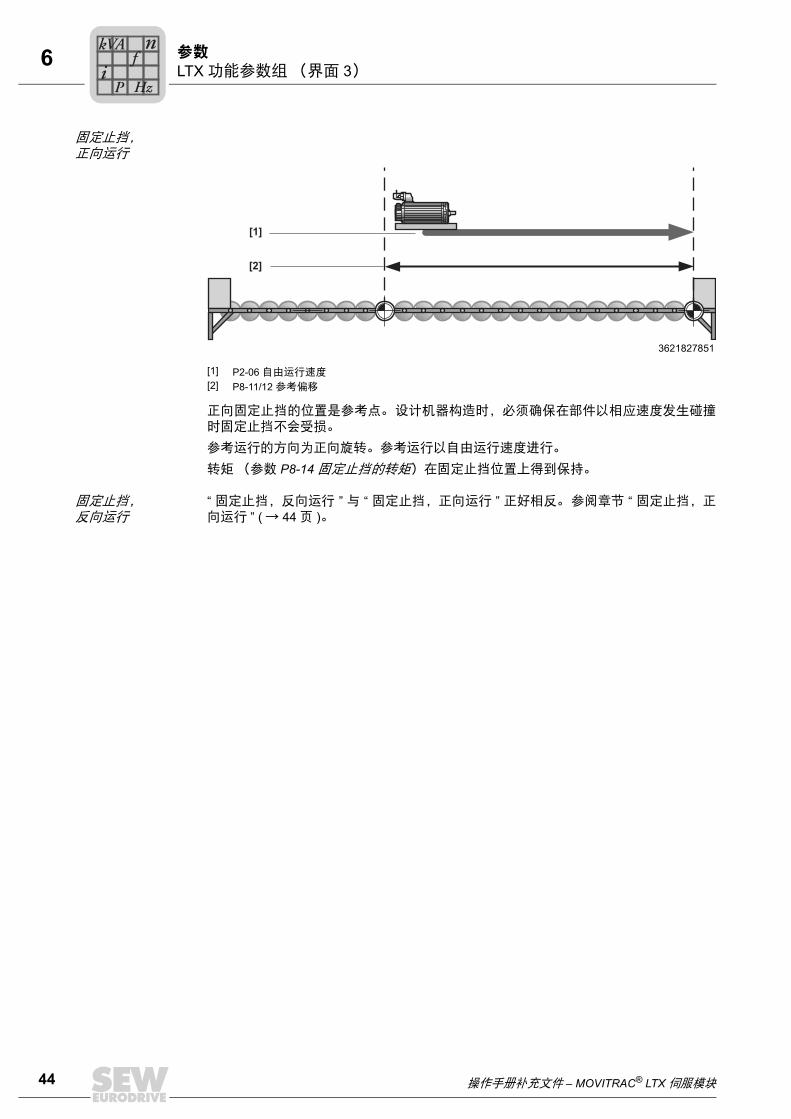
固定止挡,正向运行
正向固定止挡的位置是参考点。 设计机器构造时,必须确保在部件以相应速度发生碰撞时固定止挡不会受损。
参考运行的方向为正向旋转。 参考运行以自由运行速度进行。
转矩(参数 P8-14 固定止挡的转矩)在固定止挡位置上得到保持。
固定止挡,反向运行
“固定止挡,反向运行 ”与 “固定止挡,正向运行 ”正好相反。 参阅章节 “固定止挡,正向运行 ” (→ 44页 )。
3621827851
[1] P2-06 自由运行速度[2] P8-11/12 参考偏移
[1]
[2]
Pi
fkVA
Hz
n
6参数LTX功能参数组(界面 3)
操作手册补充文件 – MOVITRAC® LTX伺服模块 45
6.11.5 P8-06 比例增益位置控制器
输入范围: 0.1 ~ 1 ~ 400%
设置位置控制器的比例增益。 数值越高,定位精度就越高。 但数值过高可能影响运行的稳定性,甚至造成电流过载故障。 对于需要最佳控制的应用场合来说: 应该逐渐增加数值并同时观察负载的实际速度,以根据实际连接的设备调整参数值。 执行此设置,直到获得所需的动态效果,确保不超出或只稍微超出控制范围(即输出速度高于额定值)。
详细说明请参阅章节 “控制器的设置 ”。
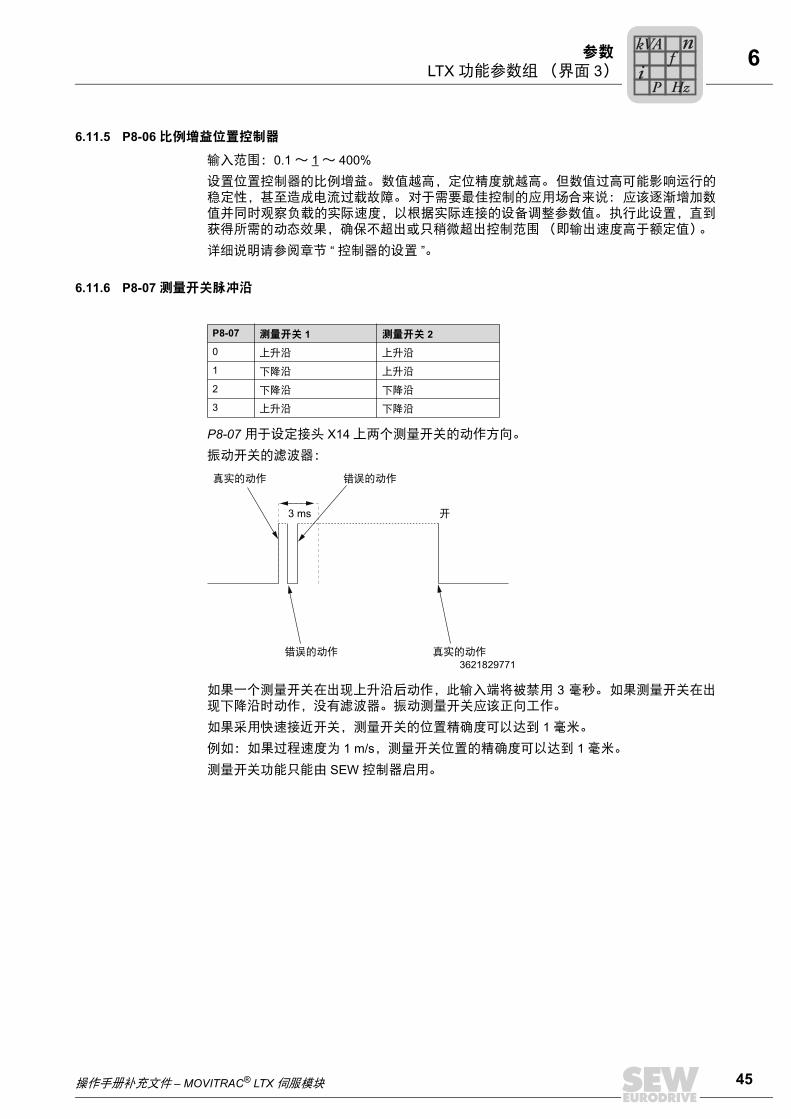
6.11.6 P8-07 测量开关脉冲沿
P8-07 用于设定接头 X14上两个测量开关的动作方向。
振动开关的滤波器:
如果一个测量开关在出现上升沿后动作,此输入端将被禁用 3 毫秒。 如果测量开关在出现下降沿时动作,没有滤波器。 振动测量开关应该正向工作。
如果采用快速接近开关,测量开关的位置精确度可以达到 1毫米。
例如: 如果过程速度为 1 m/s,测量开关位置的精确度可以达到 1毫米。
测量开关功能只能由 SEW控制器启用。
P8-07 测量开关 1 测量开关 2
0 上升沿 上升沿
1 下降沿 上升沿
2 下降沿 下降沿
3 上升沿 下降沿
3621829771
真实的动作
真实的动作
错误的动作
错误的动作
开3 ms
Pi
fkVA
Hz
n
6 参数LTX功能参数组(界面 3)
46 操作手册补充文件 – MOVITRAC® LTX伺服模块
6.11.7 P8-09 速度预控的增益
输入范围: 0.0 ~ 100 ~ 400%
此参数增强位置额定值的效果。 不应该改变标准设置。 只在输出的位置额定值无法确保信号稳定时,才应该减小参数值。 这样可以降低电机的响声。
详细说明请参阅章节 5.4.2 “通过驱动设置软件进行控制设置 ”。
6.11.8 P8-10 加速预控的增益
输入范围: 0.0 ~ 100 ~ 400%
不应该改变标准设置。 此参数增强加速预控的效果。
如果使用定位效果好,定位速度快(< 100 ms)的 SEW 控制器,可以通过提高此参数的设置值来降低一个斜坡内的定位偏差。
详细说明请参阅章节 5.4.2 “通过驱动设置软件进行控制设置 ”。
6.11.9 P8-11, P8-12 参考偏移位置
输入范围: 0, 1, 2 ~ 65535, 65536 [增量 ] P8-11 低字 ; 216 = 1周
输入范围: 0, 1, 2 ~ 65535, 65536 [转数 ] P8-12 高字
参数 P8-11 和 P8-12 包含参考偏移。参考运行结束后参考偏移将被设为实际位置。 详细说明请参阅章节 “P8-05 参考运行 ”。
6.11.10 P8-14 固定止挡的转矩
输入范围: 0.1 ~ 100 ~ 400% [P1-08]
朝固定止挡方向的参考运行的转矩电流为P8-14 × P1-08。 详细说明请参阅章节 “P8-05 参考运行 ”。
6.11.11 P8-15 转速和位置控制器自动调谐
准备中。
Pi
fkVA
Hz
n
7技术数据和尺寸图环境
操作手册补充文件 – MOVITRAC® LTX伺服模块 47
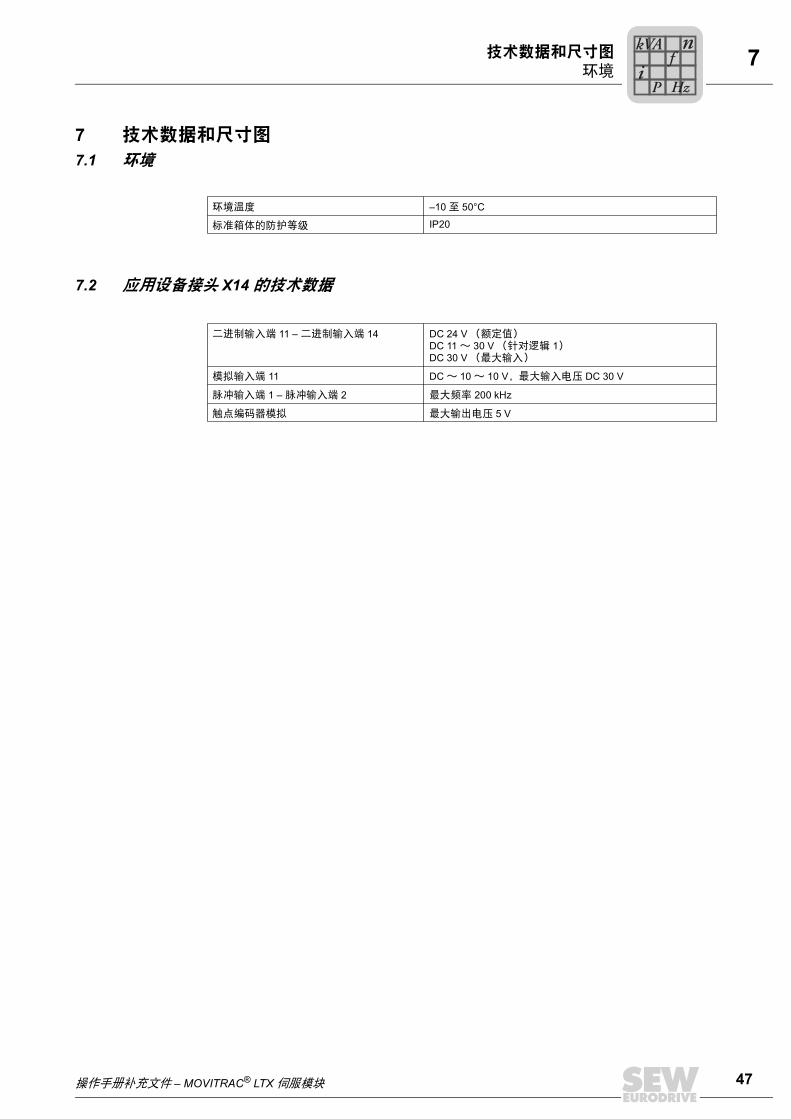
7 技术数据和尺寸图
7.1 环境
7.2 应用设备接头 X14的技术数据
环境温度 –10至 50°C
标准箱体的防护等级 IP20
二进制输入端 11 – 二进制输入端 14 DC 24 V(额定值)DC 11 ~ 30 V(针对逻辑 1)DC 30 V(最大输入)
模拟输入端 11 DC ~ 10 ~ 10 V,最大输入电压 DC 30 V
脉冲输入端 1 – 脉冲输入端 2 最大频率 200 kHz
触点编码器模拟 最大输出电压 5 V
Pi
fkVA
Hz
n
7 技术数据和尺寸图MOVITRAC® LTX尺寸图
48 操作手册补充文件 – MOVITRAC® LTX伺服模块
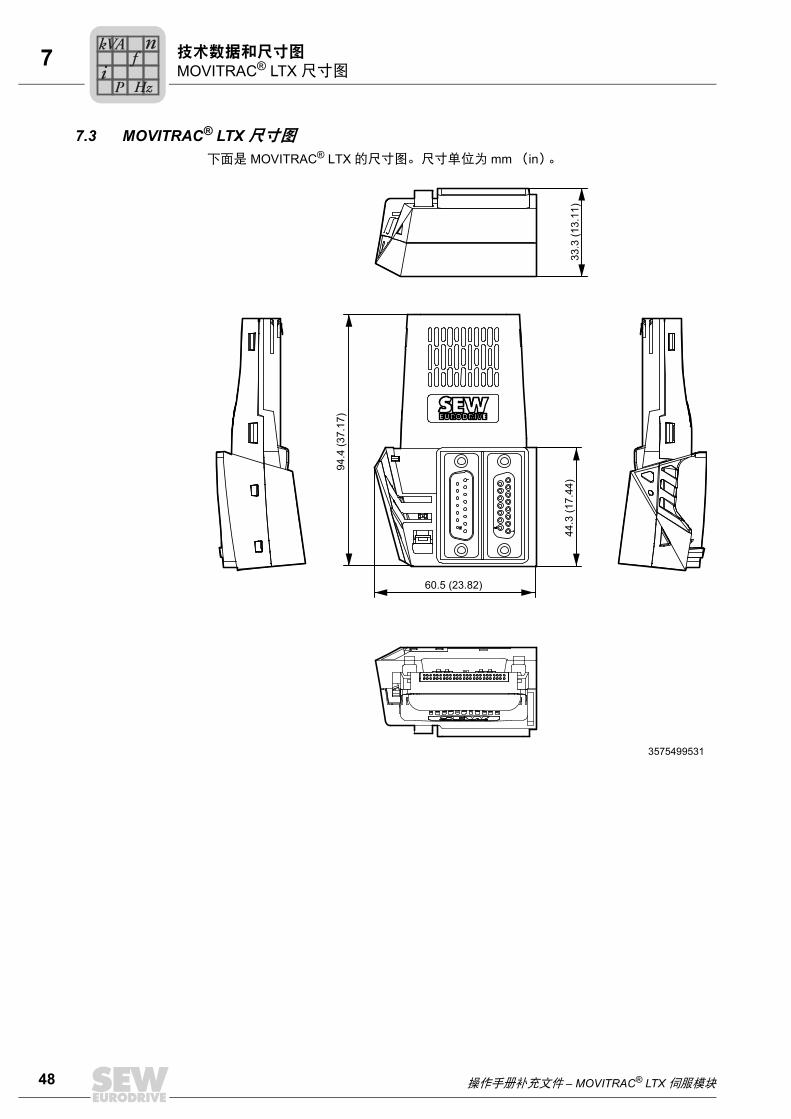
7.3 MOVITRAC® LTX尺寸图
下面是 MOVITRAC® LTX的尺寸图。 尺寸单位为 mm(in)。
3575499531
94.4
(37.
17)
60.5 (23.82)44
.3 (1
7.44
)33
.3 (1
3.11
)
Pi
fkVA
Hz
n
操作手册补充文件 – MOVITRAC® LTX伺服模块 49
关键词目录
关键词目录
A
按键组合 ......................................................24
安全提示
包含在操作步骤内的安全提示的组成 ........... 6
针对不同章节的安全提示的组成 .................. 6
组成 ........................................................ 5
安装 ............................................................. 9
电气 .......................................................11
机械 ........................................................ 9
接线 .......................................................11
B
版权标注 ....................................................... 7
比例增益位置控制器(P8-06) ........................45
标准设置 ......................................................23
步进 /方向或 A/B相位输入端每转的脉冲数(P8-02) ......................................................40
C
CCU ............................................................29
CMP电机接口 ...............................................26
参考偏移位置(P8-11, P8-12) ........................46
参考运行(P8-05) ........................................41..........................................................................40
参数 ............................................................35
LTX特定 ................................................35
LTX功能参数组................................................40
P1-14 扩展参数调用 .................................36
P1-15二进制输入端的功能选择 .................36
P1-16 电机型号 .......................................38
P1-17 智能伺服操作 .................................39
P1-21 刚性 ..............................................39
P1-22 电机负载惯性 .................................39
P2-01 预设转速 1 .....................................40
P2-05 预设转速 5 .....................................40
P2-06 预设转速 6 .....................................40
P8-01 模拟编码器定标 ..............................40
P8-02 步进 /方向或 A/B相位输入端每转的脉冲数 ..................................40
P8-03, P8-04 位置偏差的动作极限值 ...........40
P8-05 参考运行 .......................................41
P8-06 比例增益位置控制器 ........................45
P8-07 测量开关脉冲沿 ..............................45
P8-09 速度预控的增益 ..............................46
P8-10 加速预控的增益 ..............................46
P8-11, P8-12 参考偏移位置 ........................46
P8-14 固定止挡的转矩 ..............................46
P8-15 转速和位置控制器自动调谐 ..............46
操作模式 ..................................................... 11
端子操作模式 ......................................... 27
非 SEW控制器操作模式 ........................... 28
键盘模式 ................................................ 27
SEW控制器模式 ..................................... 29
SEW网关操作模式 .................................. 29
测量开关脉冲沿(P8-07) .............................. 45
拆卸 ............................................................ 10
尺寸图 ......................................................... 48
D
电机负载惯性(P1-22) ................................. 39
电机极限 ................................................28, 29
电机型号参数(P1-16) ................................. 38
电气安装 ..................................................... 11
调试 .......................................................23, 28
简单 ...................................................... 25
端子操作模式 ............................................... 27
端子操作模式的信号端子总览 ......................... 14
E
二进制输入端的功能选择(P1-15) ................. 36
F
非 SEW控制器操作模式 ................................ 28
非 SEW控制器的信号端子总览 ....................... 16
G
刚性(P1-21) ............................................. 39
构造
安全提示 ..................................................5固定止挡的转矩(P8-14) .............................. 46
H
环境条件 ..................................................... 47
环境温度 ..................................................... 47
恢复出厂设置 ............................................... 23
J
继电器接线端子 ............................................ 22
继电器接线端子和 X13的信号端子总览 ............ 22
机械安装 .......................................................9技术数据 ..................................................... 47
加速预控的增益(P8-10) .............................. 46
简单调试 ..................................................... 25
键盘 ............................................................ 23
键盘模式 ..................................................... 27
键盘模式的信号端子总览 ............................... 12
50 操作手册补充文件 – MOVITRAC® LTX伺服模块
关键词目录
结构 ............................................................. 8
包含在操作步骤内的安全提示 ..................... 6
针对不同章节的安全提示 ........................... 6
接口
CMP电机 ...............................................26
接线 ...................................................... 11, 26
K
控制回路的优化 .............................................31
控制回路优化 ................................................31
控制器
非 SEW控制器 ........................................33
控制器操作
非 SEW控制器操作模式 ...........................28
控制器模式
SEW控制器模式 ......................................29
SEW网关操作模式 ..................................29
控制信号源 ...................................................30
L
LTX功能参数组 .............................................40
LTX特定参数 .......................................... 35, 36
M
Modbus控制 .................................................30MOVI-PLC® .................................................. 29
MOVITRAC® LTX的拆卸 .................................10
名称 ............................................................. 8
铭牌 ............................................................. 8
模拟编码器定标(P8-01) ..............................40
P
P1-14 扩展参数调用 .......................................36
P1-15二进制输入端的功能选择 .......................36
P1-16 电机型号 .............................................38
P1-17 智能伺服操作 .......................................39
P1-21 刚性 ...................................................39
P1-22 电机负载惯性 .......................................39
P2-01 预设转速 1 ...........................................40
P2-05 预设转速 5 ...........................................40
P2-06 预设转速 6 ...........................................40
P8-01 模拟编码器定标 ....................................40
P8-02 步进 /方向或 A/B相位输入端每转的脉冲数 ...................................................40
P8-03, P8-04 位置偏差的动作极限值 .................40
P8-05 参考运行 .............................................41
P8-06 比例增益位置控制器 .............................45
P8-07 测量开关脉冲沿 ....................................45
P8-09 速度预控的增益 ....................................46
P8-10 加速预控的增益 ....................................46
P8-11, P8-12 参考偏移位置 .............................46
P8-14 固定止挡的转矩 ................................... 46
P8-15 转速和位置控制器自动调谐 ................... 46
Q
驱动设置向导(Drive Startup) ....................... 29
R
软件 ............................................................ 30
Modbus控制 ........................................... 30
S
SEW控制器的信号端子总览 ........................... 18
SEW控制器模式 ........................................... 29
SEW网关操作模式 ........................................ 29
SEW网关的信号端子总览 .............................. 20
设备结构 .......................................................8设备名称 .......................................................8使用网关进行操作 ......................................... 29
手册的使用 ....................................................5速度预控的增益(P8-09) .............................. 46
T
提示语
含义 ........................................................5通讯参数 ..................................................... 30
W
网关连接 ..................................................... 29
位置控制
非 SEW控制器 ....................................... 32
位置偏差的动作极限值(P8-03, P8-04) ........... 40
X
X13
针对所有操作模式的端子配置 ................... 22
X13接头针对所有操作模式的端子配置 ............. 22X14
技术数据 ................................................ 47
现场总线 ..................................................... 29
显示屏 ......................................................... 24
信号端子总览
端子操作模式 ......................................... 14
非 SEW控制器 ....................................... 16
继电器接线端子和 X13 ............................. 22
键盘模式 ................................................ 12
SEW控制器 ........................................... 18
SEW网关 .............................................. 20
操作手册补充文件 – MOVITRAC® LTX伺服模块 51
关键词目录
Y
应用设备接头 X14的端子配置
端子操作模式 ..........................................15
非 SEW控制器 ........................................17
键盘模式 ................................................13
SEW控制器 ............................................19
SEW网关 ...............................................21
用户设备接口 ................................................23
预设转速 1(P2-01) .....................................40
预设转速 5(P2-05) .....................................40
预设转速 6(P2-06) .....................................40
Z
展参数调用(P1-14) .....................................36
质保承诺 ....................................................... 7
质保范围 ....................................................... 7
智能伺服操作(P1-17) .................................39
重要提示 ....................................................... 5
转速和位置控制器自动调谐(P8-15) ..............46
转速控制
非 SEW控制器 .................................. 31, 32
网关操作模式 ..........................................34
SEW-EURODRIVE—Driving the world
SEW-EURODRIVEDriving the world
www.sew-eurodrive.com
SEW-EURODRIVE GmbH & Co KGP.O. Box 3023D-76642 Bruchsal/GermanyPhone +49 7251 75-0Fax +49 7251 [email protected]