moving kinks and nanopterons in the nonlinear klein–gordon lattice
TRANSCRIPT

Physica D 138 (2000) 267–281
Moving kinks and nanopterons in the nonlinear Klein–Gordon lattice
A.V. Savina, Y. Zolotaryukb,∗, J.C. Eilbeckba Institute for Problems of Physics and Technology, Moscow 119034, Russian Federation
b Department of Mathematics, Heriot-Watt University, Edinburgh EH14 4AS, UK
Received 28 January 1999; received in revised form 19 August 1999; accepted 8 September 1999Communicated by A.C. Scott
Abstract
We study moving topological solitons (kinks and antikinks) in the nonlinear Klein–Gordon chain. These solitons are shownto exist with both monotonic (non-oscillating) and oscillating asymptotics (tails). Using the pseudo-spectral method, the(anti)kink solutions with oscillating background (so-called nanopterons) are found as travelling waves of permanent profilepropagating with constant velocity. Each of these solutions may be considered as a bound state of an (anti)kink with abackground nonlinear periodic wave, so that the wave “pushes” the (anti)kink over the Peierls–Nabarro barrier. The stabilityof these bound states is confirmed numerically. Travelling-wave solutions of permanent profile are shown to exist dependingon the convexity of the on-site (substrate) potential. The set of velocities at which the (anti)kinks with monotonic asymptoticspropagate freely is calculated. We also find moving non-oscillating (anti)kink profiles with higher topological charges, eachof which appears to be the bound state of (anti)kinks with lower topological charge(|Q| = 1). ©2000 Elsevier Science B.V.All rights reserved.
PACS:03.40.Kf; 63.20.Ry
Keywords:Nonlinear lattice; Topological solitons; Nanopterons; Pseudo-spectral method
1. Introduction
It is known [1] that in some limiting cases, achain of interacting particles, subject to a nonlinearon-site (substrate) potential with two or more degen-erate minima, supports moving topological solitonsas monotonically increasing (kink) or decreasing (an-tikink) travelling-wave solutions. By travelling waves,we mean waves of stationary profile moving with con-stant velocity. (In particular, we will frequently con-
∗ Corresponding author. Present address: Max-Planck-Institut fürPhysik komplexer Systeme, Nöthnitzer Strasse 38, 01187 Dresden,Germany. Tel.:+49-351-871-1203; fax:+49-351-871-1199.E-mail address:[email protected] (Y. Zolotaryuk).
sider the case where a kink moves on a background ofa small amplitude oscillatory wave of infinite extent,travelling at the same velocity as the kink.)
In general, while propagating along the chain,the kink radiates small-amplitude waves and fi-nally stops because of the existence of the so-calledPeierls–Nabarro (PN) potential barrier (see, e.g., Ref.[1]). However, the topological soliton (kink and an-tikink) solutions appear to be well-defined travellingwaves of stationary profile while they are movingon an appropriate oscillating background [2]. If theinter-particle potential is anharmonic, the soliton so-lution obtained in Ref. [3] describes theantikinkmoving without radiation when its velocity attains
0167-2789/00/$ – see front matter ©2000 Elsevier Science B.V. All rights reserved.PII: S0167-2789(99)00202-X

268 A.V. Savin et al. / Physica D 138 (2000) 267–281
certainfixed values. This solution has the propertiesof both topological and acoustic (lattice) solitons andits existence is due to some balance of on-site andinter-particle nonlinearities. In the case of harmonicinter-particle interaction, such “transparent” motioncan also exist, but only for topological charge|Q| > 1and also with some fixed velocities (see Refs. [1,3]).
On the other hand, the discretisation of the con-tinuous sine–Gordon (SG) equation used in Refs.[4,5] yields a discrete integrable system which admitsmonotonic topological soliton solutions. However,such a discrete version does not describe a stan-dard system of coupled particles, particularly, theKlein–Gordon chain. Another discretisation proce-dure has been used in Ref. [6] for the SG equationand in Ref. [7] for theφ4 model. For both systems,the Peierls–Nabarro (PN) potential barrier was elimi-nated and, as a result, a discrete system of equationshave been obtained, describing transparent regimes ofkink propagation.
As is commonly known (see, e.g., Ref. [8]), in thecontinuum limit the nonlinear Klein–Gordon equationadmits moving kink solutions with a finite interval ofvelocities from zero to the speed of small-amplitudewaves. These kink solutions have monotonic be-haviour of the standard type. The interaction of akink with small-amplitude waves (phonons) was atopic of great interest for two decades and the de-tails of these investigations are given in the reviewpapers by Bishop et al. [8] and Jackiw [9]. In par-ticular, it was shown that a small-amplitude wavecan propagate transparently through a standing kinkwith some change in the wave phase which dependson the velocity of wave propagation. In this case thewave is not trapped by the kink and therefore sucha solution does not belong to the class of pure trav-elling waves. On the other hand, the bound states ofa kink and a wave moving with the same velocitywere studied in a generalised version of the contin-uous SG equation with nonlocal interactions [10].These solutions can be referred to as kinks on anoscillating background or asnanopterons, the termintroduced by Boyd in the case of continuous systems[11] (see also the recent review by Flach and Willis[12]).
The present paper aims at studying topological soli-ton solutions that have both non-oscillating (mono-tonic) and oscillating tails. Note that in the latter case(nanopterons), the tails propagate with the same ve-locity as the kink itself. This new type of solutionappears to be stable, resulting in the formation of abound (“self-trapped” ) state of a kink and a wavewith a nonlinear dispersion law. As a result of thisinteraction, the phase velocity of phonons decreasesto sub-sonic values. On the other hand, due to thekink-wave interaction, the kink is able to propagatein a discrete chain with any constant subsonic veloc-ity, despite the existence of the PN barrier. In otherwords, the kink is pinned to the wave decreasing itsvelocity and in its turn this wave forces the kink topropagate in a coupled way, i.e., some kind of the dy-namicalself-trappingmechanism of the kink with the(nonlinear) wave takes place.
We also study the structure of the nonlinear wavesthemselves. Similarly to the continuous Klein–Gordonsystem that supports nonlinear periodic waves(so-called cnoidal waves), we expect that nonlinearwaves of the same kind can also exist in the discretecase. However, these waves should possess specificfeatures of discrete systems.
The following important result concerning kink mo-bility, has been obtained in Refs. [13,14]. Here themodel with the on-site periodic potential constructedfrom pieces of parabolas has been considered. In thismodel the switching of the ground state from the kinksolution centred on a chain site to the kink solution,centred in-between two sites and vice versa depend-ing on the on-site potential convexity was shown tooccur. This observation gives a good reason to believethat for a general nonlinear on-site potential, depend-ing on its convexity, atransparentregime of the kinkpropagation can occur as well.
In the majority of cases, due to symmetry argu-ments, the PN barrier that describes the pinning poten-tial experienced by narrow kinks is defined through themodulus of the energy difference1E = |E0 − E1/2|,whereE0 (E1/2) is the energy of a kink centred on achain site (in-between two sites), as described in [15].However, as shown by Peyrard and Remoissenet [16],strictly speaking, this definition is not correct in all

A.V. Savin et al. / Physica D 138 (2000) 267–281 269
cases because the two particular states 0 and 1/2 donot always have highest and lowest potential energies.Therefore in a general case, the height of the PN bar-rier should be calculated taking into account all inter-mediate positions of a kink (or an antikink) within anunit chain cell [17,18]. On the other hand, it shouldbe noticed that in itself the absence of a PN barrier isnot a condition for the existence of a travelling wavesolution of constant profile because the PN barrier isdefined for static (standing) kinks, i.e., when the kinkvelocity s = 0.
If for a certain value of the kink velocitys 6= 0,there exists a moving kink of permanent profile, thishappens for some parameter values of the chain that ingeneral differ from those for which the switching of thekink ground state occurs. Consequently, if we find a setof the chain parameter values for which1E = 0, onecan expect that for a slightly changed set of parametersthere exists a moving kink solution with some small,but non-zero value of the velocitys. In the presentpaper, we find these parameter values, starting from aninfinitesimal value of the velocitys, with subsequentcontinuation step by step for all admissible velocities.
It should be also mentioned that the existence ofnon-oscillating kink solutions with higher topologicalcharges (|Q| > 1) has been demonstrated at some spe-cial values of the velocity. However, the mechanism ofsuch a transparent regime differs from that discussedabove. Thus, Peyrard and Kruskal [1] explained thisphenomenon as the result of the “resonance” interac-tion of the waves emitted by two kinks with topolog-ical chargeQ = 1 when these waves happen to beout-of-phase. The waves suppress each other, so thatthey annihilate and, as a result, the composite kink(with chargeQ = 2) propagates without radiation.The same situation can happen for|Q| = 3, 4, . . . .Such non-oscillating topological solitons can be con-sidered asboundstates of solitons (kinks or antikinks)with lower topological charge, formed due to attrac-tive interaction through phonons. We expect that moresophisticated configurations (profiles) of such boundstates which may be similar to those obtained in Ref.[10], can exist in the discrete Klein–Gordon lattice. Itis also worth of mentioning results on damped and d.c.driven Josephson-junction arrays where similar kink
(fluxon) structures have been studied (see, e.g., Refs.[19,20]).
The paper is organised as follows. In Section 2 wedescribe the model and derive the equations of motion.The linear and nonlinear periodic wave solutions toour model are studied in the next section. In Section 4we investigate the Peierls–Nabarro barrier for standingkink solutions. Section 5 is devoted to moving kinks:both with monotonic and oscillating tails. Concludingremarks and a discussion are contained in Section 6.
2. The model
We consider a chain of coupled particles subjectedto an external on-site potential. The dimensionlessHamiltonian of such a system can be written as fol-lows:
H =∑n∈Z
[1
2p2
n + U(un+1 − un) + V (un)
], (1)
wherepn = un is the conjugate momentum of thenth particle in the chain,un is the displacement of thenth particle from its equilibrium position, andU(r)
is the inter-particle interaction potential normalisedby U(0) = 0 andU ′′(0) = 1. We consider only aharmonic approximation to the inter-particle potential:U(r) = r2/2. The on-site potentialV (u) is assumedto be a symmetric periodic function with period 2π . Itsminima are situated atu = 2πk, k ∈ Z, and maxima atu = (2k+1)π , k ∈ Z. For the periodic functionV (u),we choose the slightly modified Peyrard–Remoissenetpotential [16]
V =V (u; α)=γ(1 + 2α)(1 − cosu)
1 + α(1 − cosu), γ > 0, (2)
where the parameterα ≥ 0 measures the convexity ofthe on-site potential barrier and 2γ is its height. Theshape of the potential (2) forα = 0, 1, 5 and 20 isshown in Fig. 1.
When α = 0, the function (2) coincides with theon-site potential for the SG model. For all values ofthe parameterα ≥ 0 the minima of this potential are0 and the maxima are 2γ . The increase ofα leads tothe monotonic growth of the convexity of the barrier

270 A.V. Savin et al. / Physica D 138 (2000) 267–281
Fig. 1. The shape of the on-site potentialV (u; α) for α = 0 (curve1), α = 1 (curve 2),α = 5 (curve 3),α = 20 (curve 4) andγ = 1.
(see Fig. 1). In the limitα → ∞ the potentialV (u)
tends to the discrete periodic potential
V (u; ∞) = 2γ
{0, u = 2πk, k ∈ Z,
1, u 6= 2πk, k ∈ Z.(3)
The Hamiltonian (1) gives the discrete nonlinearKlein–Gordon equation:
un = un+1 − 2un + un−1 − V ′(un), n ∈ Z. (4)
In this paper we focus on travelling-wave solutionsof stationary profile moving with constant velocitys.For this type of solutions one can write
un(t) = u(n − st) ≡ u(z), z = n − st. (5)
Then Eq. (4) is reduced to the following differential-difference equation:
s2u′′(z) = u(z + 1)−2u(z) + u(z−1)−V ′[u(z)]. (6)
It is extremely difficult to perform a complete analysisof Eq. (5) analytically and therefore, in order to findtravelling-wave solutions in the form of periodic wavesor (anti)kinks, we shall study this equation numericallyusing the so-called pseudo-spectral method [21].
3. Periodic waves of stationary profile
First, let us study the dispersion law for a nonlinearperiodic wave. This wave can be considered as a linearwave only in the following two opposite limiting cases:(i) for small amplitudes (|un| << π ) and (ii) for largeamplitudes (|un| >> π ). In the small-amplitude limitthe dispersion law can be written as follows:
ω2(q) = 2(1 − cosq) + γ, (7)
whereq = 2π/λ is the wave number andλ ≥ 2 is thewave length. In the large-amplitude limit the on-sitepotentialV (u) essentially does not influence the wavepropagation and therefore the dispersion law becomesapproximately
ω2(q) = 2(1 − cosq). (8)
The phase velocity of a linear wave depends only on itslength: s = ω(q)/q (the velocity of small-amplitudelong-length waves iss0 = limq→0ω(q)/q = 1). Sincethe system of equations of motion (4) is nonlinear, thevelocity of a periodic wave depends not only on itslength but also on its amplitude. We look for periodictravelling-wave solutions of the form (5) whereu(z)
should be an even periodic function with periodL =λ. Then this solution should have zero average∫ L
0u(z) dz = 0. (9)
We can find such a solution by using the pseudo-spectralmethod which is briefly described as follows. Let theperiod L and the velocitys be fixed. Then we canlook for the wave profile as the expansion in a finiteFourier series
u(z) 'N∑
j=1
cjφj (z), (10)
whereφj (z) = cos(2πjz/L). The numberN of thecoefficientscj should be chosen in such a way that thefurther increase ofN does not cause a change of thewave profile to a given numerical tolerance (usually,it is sufficient to chooseN = 100). Substituting theexpansion (10) into Eq. (6), for anyz we obtain thefollowing expression:
F(z) =N∑
j=1
[φj (z + 1) − 2φj (z) + φj (z − 1)
+s2(
2πj
L
)2
φj (z)
]cj
−V ′ N∑
j=1
cjφj (z)
= 0. (11)
Next, calculating the function (11) for theN collo-cation pointszi = (i − 1)L/2(N − 1), we obtain a
A.V. Savin et al. / Physica D 138 (2000) 267–281 271
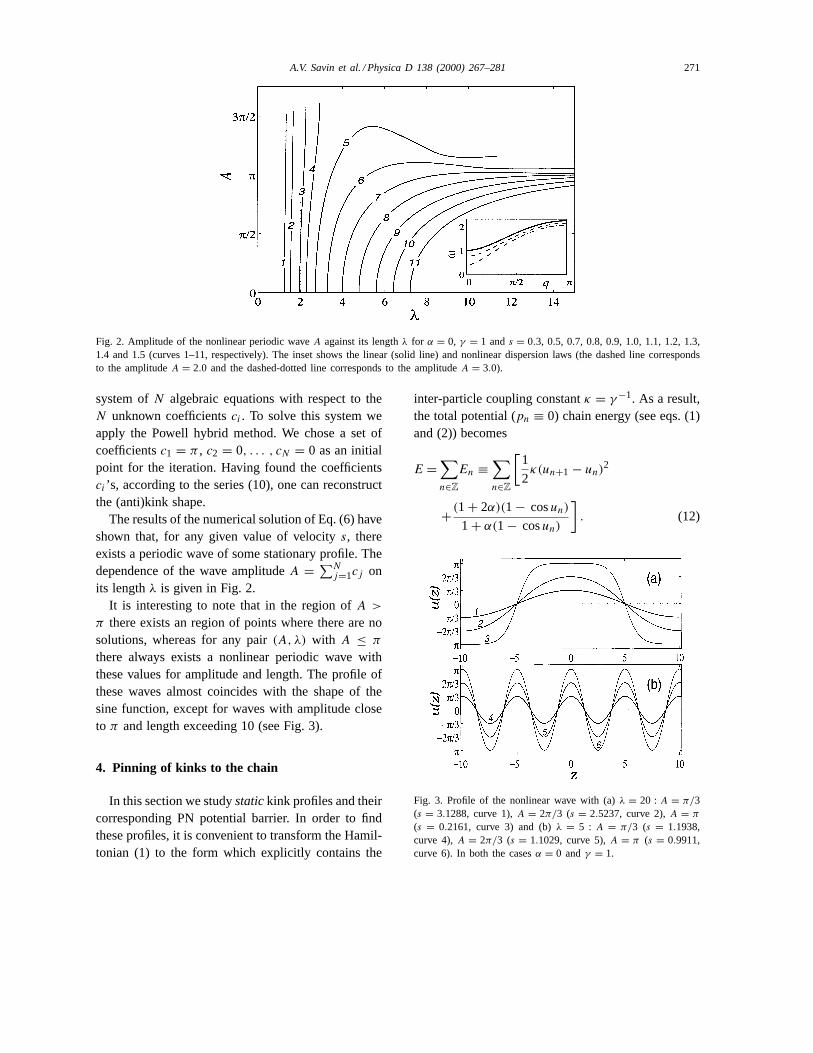
Fig. 2. Amplitude of the nonlinear periodic waveA against its lengthλ for α = 0, γ = 1 ands = 0.3, 0.5, 0.7, 0.8, 0.9, 1.0, 1.1, 1.2, 1.3,1.4 and 1.5 (curves 1–11, respectively). The inset shows the linear (solid line) and nonlinear dispersion laws (the dashed line correspondsto the amplitudeA = 2.0 and the dashed-dotted line corresponds to the amplitudeA = 3.0).
system ofN algebraic equations with respect to theN unknown coefficientsci . To solve this system weapply the Powell hybrid method. We chose a set ofcoefficientsc1 = π , c2 = 0, . . . , cN = 0 as an initialpoint for the iteration. Having found the coefficientsci ’s, according to the series (10), one can reconstructthe (anti)kink shape.
The results of the numerical solution of Eq. (6) haveshown that, for any given value of velocitys, thereexists a periodic wave of some stationary profile. Thedependence of the wave amplitudeA = ∑N
j=1cj onits lengthλ is given in Fig. 2.
It is interesting to note that in the region ofA >
π there exists an region of points where there are nosolutions, whereas for any pair(A, λ) with A ≤ π
there always exists a nonlinear periodic wave withthese values for amplitude and length. The profile ofthese waves almost coincides with the shape of thesine function, except for waves with amplitude closeto π and length exceeding 10 (see Fig. 3).
4. Pinning of kinks to the chain
In this section we studystatickink profiles and theircorresponding PN potential barrier. In order to findthese profiles, it is convenient to transform the Hamil-tonian (1) to the form which explicitly contains the
inter-particle coupling constantκ = γ −1. As a result,the total potential (pn ≡ 0) chain energy (see eqs. (1)and (2)) becomes
E =∑n∈Z
En ≡∑n∈Z
[1
2κ(un+1 − un)
2
+ (1 + 2α)(1 − cosun)
1 + α(1 − cosun)
]. (12)
Fig. 3. Profile of the nonlinear wave with (a)λ = 20 : A = π/3(s = 3.1288, curve 1),A = 2π/3 (s = 2.5237, curve 2),A = π
(s = 0.2161, curve 3) and (b)λ = 5 : A = π/3 (s = 1.1938,curve 4),A = 2π/3 (s = 1.1029, curve 5),A = π (s = 0.9911,curve 6). In both the casesα = 0 andγ = 1.

272 A.V. Savin et al. / Physica D 138 (2000) 267–281
In general, topological solitons (kinks and an-tikinks) are pinned to the lattice, so that a non-zeroPN potential barrier appears. Its height measures theactivation energy for the kink propagation through onelattice site. However, as shown in Refs. [13,14], forsufficiently large convexity of the on-site piece-wiseparabolic potential, there exists a finite number ofvalues of the coupling parameterκ for which the kinkmotion becomes free. In this case the PN potentialbarrier completely disappears.
Let us study this phenomenon more precisely. LetuK
n , n ∈ Z, be an (anti)kink profile obtained by solvingthe stationary version of the Klein–Gordon equationenergy (12). Then we can define the position of thekink centre
n =∑n∈Z
nqn, qn = uKn+1 − uK
n−1
2(uK∞ − uK−∞),
uK±∞ = lim
n→±∞ uKn , (13)
and the kink width
D = 2√∑
n∈Z(n − n)2qn. (14)
The symmetrickink profiles are centred either ex-actly on a lattice site (we call them site-centred kinksor antikinks) or in the middle between two latticesites (called bond-centred ones). The symmetry of thesite-centred kink (on the siten0 = n) is described bythe relation
uKn0−n − π = π − uK
n0+n, n ∈ Z, (15)
while for the bond-centred kink [between then0th andthe (n0 + 1)th sites] the symmetry relation is
uKn0−n − π = π − uK
n0+n+1, n ∈ Z. (16)
Let E0 be the energy of a site-centred (anti)kink andE1/2 be the energy of this kink, but now centred be-tween lattice sites. In order to find the shape of the PNbarrier, we have to solve the following minimisationproblem:
E =N−1∑n=1
→ En minu1=0, uN=2π
(17)
with the constraintuN/2 = ρ(0 < ρ < 2π).The problem (17) has been solved by using theconjugate-gradients method, starting from the initialcondition
un = 0, for n < N/2; uN/2 = ρ;un = 2π, for n > N/2.
For reasonable numerical accuracy of results ob-tained by this method, the number of chain sitesN
should be 10 times greater than the average kink widthD. Then the kink profile does not depend on thechain length. With monotonic decrease of the param-eter ρ, the position of the kink centren(ρ) will in-crease monotonically. As a result, it is possible to findthe dependence of the kink energyE on its positionn : E(n) = E[ρ(n)].
The shape of the PN potential normalised to theminimal kink energyEmin = minE(n) is given in Fig.4. As demonstrated by this figure, the PN potential isa periodic function with the period 1. Depending onthe system parametersκ andα, a minimum of the PNpotential corresponds to the static kink centred eitherat a site(Emin = E0) or between sites(Emin = E1/2).As can be seen from Fig. 4, by changing system
Fig. 4. Peierls–Nabarro (PN) potential relief for (a)κ = 0.97(Emin = E1/2), (b) κ = 0.9790104 (Emin = E0 = E1/2) and (c)κ = 0.99 (Emin = E0). In all casesα = 0.1.

A.V. Savin et al. / Physica D 138 (2000) 267–281 273
Fig. 5. Height of the barrier1E against the couplingκ for theconvexity parameter values: (a)α = 0 (curve 1),α = 0.01 (curve2), α = 0.1 (curve 3) and (b)α = 1 (curve 4).
parameters, namely, the coupling constantκ, one canobtain the switching of the kink ground state. In-deed, forκ = 0.97 the ground state isEmin = E1/2
corresponding to the bond-centred kink whereas thesite-centred kink has an energy maximum (see Fig.4a). Forκ = 0.979 both the site-and bond-centredkinks are ground states (Emin = E0 = E1/2) and thekink solution corresponding to the energy maximumlies in-between these two configurations (see Fig.4b). Finally, in Fig. 4c forκ = 0.99 we have the PNpotential opposite to the case withκ = 0.97.
Let us study this switching phenomenon with moredetails. In Fig. 5 we plot the dependence of the energydifference1E = |E0 − E1/2| on the coupling param-eterκ for different values:α, α = 0.01, α = 0.1. Itfollows from this figure that the barrier height1E de-cays exponentially with the growth of the couplingκ
for all values of the convexity parameterα. Note thatfor the SG potential (α = 0), 1E is always non-zero,so that for this case the bond-centred state appears tobe the ground state of the chain. A small increase ofthe convexity parameter (α = 0.01) gives the couplingparameter valueκ1 = 8.3257 for whichE0 = E1/2.For this value ofκ the switching of the symmetry ofthe kink ground state occurs. The pinning energy (thehight of the PN barrier) abruptly decreases by several
orders. For allκ < κ1, the ground state of the chainis a bond-centred profile, while forκ > κ1 the groundstate has a (anti)kink profile centred on a lattice site. Afurther increase inα results in the growth of the cou-pling parameter valuesκl , l = 1, 2, . . . , ν for whichthe energy (12) does not depend on the position ofthe (anti)kink centre. Thus, forα = 0.1, the numberof states for whichE0 = E1/2 is ν = 4 while forα = 1 the number of such states isν = 14. With thegrowth of α, the pointsκl shift monotonically to theleft, and additional pointsκl for whichE0 = E1/2 ap-pear from the right. For each valueκ = κl , theswitch-ing of the ground state symmetry occurs. For exam-ple, for 0≤ κ < κ1 the ground state of the chain is astanding (anti)kink state with bond-centred symmetry,for κ1 < κ < κ2 that with site-centred symmetry, forκ2 < κ < κ3 that with bond-centred symmetry and soon. For each “transparent” pointκ = κl , the pinningenergy decreases by several orders, so that the chainbecomes more “transparent” for kink motion. The de-pendence of the transparent pointsκl on the convexityparameterα is given in Table 1.
In order to understand the regime of free kink prop-agation, let us consider the limiting case when the con-vexity parameterα → ∞. In this case, for each valueof κ, a countable set of kink states exists. Each state is
Table 1Dependence of the transparent pointsκl , l = 1, 2, . . . , ν on theconvexity parameterα
κ α
0 0.01 0.1 1 ∞κ1 ∞ 8.3257 0.9790 0.2667 0.2026κ2 ∞ 3.0834 0.7872 0.6079κ3 6.3808 1.6140 1.2159κ4 10.881 2.7470 2.0264κ5 ∞ 4.1819 3.0396κ6 5.9186 4.2555κ7 7.9576 5.6740κ8 10.2993 7.2951κ9 12.9440 9.1189κ10 15.8918 11.1453κ11 19.1430 13.3744κ12 22.1430 15.8061κ13 25.5500 18.4405κ14 30.7100 21.2774κ15 ∞ 24.3171

274 A.V. Savin et al. / Physica D 138 (2000) 267–281
uniquely defined by the number of particlesj whichare located on the inter-well barrier of the on-site po-tentialV (u; ∞). In the case of evenj the kink is cen-tred between chain sites while for oddj its centre islocated on a chain site. The energy of the (anti)kinkstate withj particles on the barrier is
Ej = Ej(κ) = 2j + 2π2
j + 1κ. (18)
Therefore, the symmetry switching of the ground stateoccurs for
κ = κj = j (j + 1)
π2(19)
when a new chain particle appears on the potentialbarrier:Ej−1(κ) = Ej(κ), j = 1, 2, . . . . For instance,when 0≤ κ < κ1, the ground state energy isE0(κ),for κ1 < κ < κ2 it is E1(κ) and in the general case theground state energyEj(κ) corresponds to the intervalκj < κ < κj+1. Therefore, one can conclude that thetransparent pointsκl → l(l + 1)/π2 as the convexityparameterα tends to infinity.
5. Families of moving kinks
As we have already seen, in general it is not possibleto find kinks (and antikinks) with monotonic asymp-totics which propagate in a discrete lattice with perma-nent profile and velocity, except for some fixed valuesof velocity. However, their uniform propagation is pos-sible on an oscillating background. The existence oftransparent points for the coupling parameterα givesus reason to expect that for considerably large con-vexity of the substrate potentialV (u; α), regimes offree kink propagation can occur. We look for kink so-lutions of Eq. (6), both with non-oscillating and oscil-lating asymptotics, using the pseudo-spectral methoddeveloped in [2,21] and described in detail in Ref. [3].
5.1. Kinks with non-oscillating asymptotics
Let us consider the case of antikink solutions (thesame results are valid for kink solutions due to thekink-antikink symmetry) with topological chargeQ =−1. We take the fixed value:γ = κ−1 = 1. For the
Fig. 6. Velocitiess1 (curve 1) ands2 (curve 2) of the non-oscillatingtopological soliton (kink or antikink) motion against the convexityparameterα for γ = 1.
standing profile1E = 0 if α = α1 = 0.0975 andα = α2 = 0.5387. This means that the anti(kink)should also possess a travelling-wave solution withsome fixed velocitiess > 0. Therefore one can expectthat for other values ofα which are close toα1 or α2,the velocity of the anti(kink) is different from zero.
Using the pseudo-spectral method, the numericalsearch for (anti)kink solutions of Eq. (6) withγ = 1has shown that non-oscillating (anti)kinks exist onlyfor α ≥ α1. The shift of the transparent point to theright is expected because the coefficientγ is effec-tively reduced, approximately by the factor(1− s2)−1
in the case of sufficiently broad (anti)kink profiles.We have found that there exists onenon-zerovalueof velocity s1 = s1(α) for which the non-oscillating(anti)kink propagates with permanent shape. Forα2 ≤α ≤ 0.9 there exists also another value of the velocitys2 = s2(α). Note that moving kinks do not exist at in-finitesimal values ofs and start from some small butfinite value of velocity. The dependence of the veloc-ities s1 and s2 of the (anti)kink on the convexity pa-rameterα is shown in Fig. 6 forγ = 1. The shape ofthe antikink solution forα = 1, γ = 1 ands = s1 =0.5907 is shown in Fig. 7(a) by a solid line. The kinksolution is the corresponding monotonically increas-ing function. The particle velocitiesun are depicted inFig. 7(b).
Let us check the accuracy of our solution. For thispurpose we integrate numerically the system of equa-

A.V. Savin et al. / Physica D 138 (2000) 267–281 275
Fig. 7. Shape of the antikink forα = 1, γ = 1 and s = 0.5907.Solid lines represent the profiles of (a) the antikinku(z) and(b) the particle-velocities field−su′(z) obtained by using thepseudo-spectral method. Circles represent the final (a) positionsun(t) of the chain particles and (b) particle velocitiesun(t) at thetime instantt = 6780.
tions of motion (4) with periodic boundary conditionsun±N ≡ un and un±N ≡ un, whereN = 200 isthe number of particles in the chain. Numerical sim-ulations (here and in what follows the fourth-orderRunge–Kutta method with the time step1t = 0.01is used) have shown that the topological soliton canpropagate along the chain with constant velocity andshape. Thus, during the timet = 6780 the solitonpassed around the chain 20 times and its initial profile(shown by circles in Fig. 7) coincided exactly with theinitial one (shown by solid line in Fig. 7).
Let us study the collision of topological solitons. Tothis end we simulate the system of equations of mo-tion (4) with fixed boundary conditions for the chainconsisting ofN = 200 particles. In order to dimin-ish the influence of radiation, we introduce some fric-tion at the chain ends by adding the term−0un with0 = 0.1 to the r.h.s. of the equations of motion (4)for the particles with numbersn = 1, 2, . . . , 10 and191, 192, . . . , 200. We choose the initial conditionswhich correspond to two solitons (two antikinks) withthe parameter valuesα = 1, γ = 1 ands = 0.5907which move towards each other. The collision of the
solitons with opposite topological charges results intheir annihilation with the creation of a breather. How-ever, the result of the collision of the solitons withthe same topological charge is rather unexpected (seeFig. 8). This collision leads to a non-elastic reflec-tion of the solitons which is accompanied by radia-tion of phonons. After the collision, the interaction ofthe solitons with these phonons leads to their attrac-tion and finally to the formation of a standingboundstate of these solitons that have the same topologi-cal charge (see Fig. 8 for the two colliding antikinks).This bound state consists of three components: twoantikinks with a breather in-between. Therefore, in adiscrete chain, stable standing bound states of topo-logical solitons with the same charge can exist. Thedynamics of such bound states will be studied below. Itshould be emphasised that such a scenario of the kink(or antikink) collision is possible only in a discretemodel. In the continuum sine–Gordon model such acollision always results in elastic reflection of collidingsolitons.
In further stability studies we investigated collisionsbetween kinks (or antikinks) for different values ofα.Results of these simulations show that, depending onα, collisions can be near to elastic or non-elastic withdifferent interaction scenarios. For smallα, collisionsare close to elastic with relatively small radiation
Fig. 8. Creation of the standing bound state of the two antikinks(Q = −1) after their collision (α = 1, γ = 1 ands = 0.5907).

276 A.V. Savin et al. / Physica D 138 (2000) 267–281
Fig. 9. Contour plots of antikink–antikink collisions for different values ofα: (a) α = 0.55, s = 0.5473; (b)α = 0.75, s = 0.5737; (c)α = 1.2, s = 0.5982; (d)α = 5, = 0.592.
appearing as a result [see, for example, Fig. 9(a)]. Forlargerα, interactions are more complicated [see Figs.9(b) and (c)], with several collisions and repulsionsas shown in Fig. 9(d). A similar situation was ob-served for the two non-integrable models: the doublesine–Gordon model (see [22]) and theφ4 model (see[23]). Finally, for even largerα, kinks merge togetherwithout any visible fine structure.
From the above results we conclude that hereα
acts in some sense as a measure of the “integrabil-ity” of a system. Indeed, whenα is small, we arecloser to the discrete sine–Gordon equation (which al-though still non-integrable, is close to the continuoussine–Gordon equation, which is integrable). This canbe seen from mutual kink–kink (or antikink–antikink)collisions, which are elastic in integrable systems andnearly elastic for systems close to integrable. Increas-ing α, we move further from the integrable model and,
as a result, we obtain completely non-elastic interac-tions.
5.2. Topological solitons on an oscillatingbackground (nanopterons)
A topological soliton (kink or antikink) with mono-tonic asymptotics can move along the discrete chainonly with some preferred values of velocitys. In allother cases the soliton can move only on the back-ground of a nonlinear periodic wave as found in Ref.[2].
Let us consider the case withα = 0 andγ = 1.In this case there are no values of velocitys whennon-oscillating kink propagation is possible. The nu-merical search for travelling-wave solutions satisfyingthe condition (5) by using the pseudo-spectral methodhas shown that for the velocity range 0< s < 1 the

A.V. Savin et al. / Physica D 138 (2000) 267–281 277
Fig. 10. Shape of the nanopteron for the parameter valuesα = 0 andγ = 1 that moves with velocitys = 0.1. Solid lines represent (a)the antikink profileu(z) and (b) the particle-velocities field−su′(z) obtained by using the pseudo-spectral method. Circles represent thefinal (a) particle positionsun(t) and (b) particle velocitiesun(t) at the time instantt = 2400 (the chain consists ofN = 60 particles).
system of equations of motion (4) admits kink solu-tions on the background of a periodic wave (callednanopterons [11]). The phase velocity of these wavescoincides exactly with the kink velocity. The profileof such a solution is presented in Fig. 10. As onecan see from this figure, the soliton motion occurs ona background of a nonlinear modulated wave whichperforms de-pinning of the soliton. Fors ≥ 0.72, thewave length of the periodic wave is greater than 2 (seeFig. 2). In this case the accompanying wave becomespurely monochromatic (see Fig. 11).
It should be emphasised that the nanopteron solu-tion is not unique for each value of velocitys. Thisnon-uniqueness of the solution happens because non-linear waves of different length can have the same ve-locity (see Fig. 2). The two different solutions for thevelocity s = 0.73 are given in Figs. 11 and 12. Thefirst solution corresponds to antikink motion on thebackground of the wave with amplitudeA = 0.47 andlengthλ = 2.05, while the second one corresponds tothe motion on the background of a wave withA =0.557 andλ = 2.053.
Fig. 11. Shape of the nanopteron for the system parametersα = 0andγ = 1 that propagates with velocitys = 0.73. Solid lines rep-resent (a) the nanopteron profileu(z) and (b) the particle-velocitiesfield −su′(z) obtained by the pseudo-spectral method. Circles rep-resent the final (a) particle positionsun(t) and (b) particle veloc-ities un(t) at the time instantt = 1042 (the chain consists of 40particles). The wave length isλ = 2.05 and the wave amplitudeis A = 0.41.

278 A.V. Savin et al. / Physica D 138 (2000) 267–281
Fig. 12. Shape of the nanopteron forα = 0, γ = 1 ands = 0.73. Solid lines represent (a) the nanopteron profileu(z)
and (b) the particle-velocities field−su′(z) obtained by using thepseudo-spectral method. Circles represent the final (a) particle po-sitions un(t) and (b) particle velocitiesun(t) at the time instantt = 1009 (the chain consists of 46 particles). The wave length isλ = 2.053 and the wave amplitude isA = 0.557.
The displacement and velocity fields obtained aboveby using the pseudo-spectral method were used as ini-tial conditions for numerical simulations of the equa-tions of motion (4) in the chain with periodic bound-ary conditions. These simulations have demonstratedthe stability of the nanopteron profiles shown in Figs.10–12 that move with velocitiess < 1. In general, theamplitude of oscillations increases with the growth ofvelocity s. Solutions of the nanopteron type also ex-ist for s ≥ 1. In this case the amplitude of the wavereachesπ , i.e., it becomes comparable with the am-plitude (height) of the topological soliton. Numericalsimulations of the evolution of these solutions haveshown that they are unstable. During their propaga-tion, very rapid separation of the topological solitonfrom the periodic wave takes place.
5.3. Bound states of topological solitons
Stable bound states of topological solitons of thesame charge have been discovered first in Ref. [1] forthe discrete SG model which admits dynamically sta-ble kink solutions with higher charges (|Q| = 2, 3).Let us consider the caseα = 0. For this case (i.e.,
for the standard SG model) the numerical solution ofEq. (6) with the boundary conditionsu(−∞) = 4π
and u(∞) = 0 has shown the existence of severaltypes of kink solutions with topological chargeQ =±2. The profile of these solutions is presented in Fig.13. All these solutions can be considered as boundstates of two topological solitons and their bindingcan occur atdifferentdistances between them. More-over, the profile of such a bound state in the vicin-ity of its centre has an odd number 2k + 1, k =0, 1, 2, . . . , of inflection points. This number (ork)determines the distance between the 2π (anti)kinks,so that it describes the type of solutions obtained byusing the pseudo-spectral method. Thus, Fig. 13(a)
Fig. 13. Shape of the antikinks with topological chargeQ = −2 forα = 0. Solid lines represent the soliton profile obtained by usingthe pseudo-spectral method. Circles represent the final particledisplacementsun(t) obtained after integration timet : (a) k = 0,γ = 4, s = 0.6134 andt = 815.0; (b) k = 1, γ = 2, s = 0.4724and t = 1058.0; (c) k = 2, γ = 1.5, s = 0.4157 andt = 1203.0;(d) k = 3, γ = 0.55, s = 0.6155 andt = 789.6.

A.V. Savin et al. / Physica D 138 (2000) 267–281 279
demonstrates the profile of the solution with zero dis-tance between the solitons of chargeQ = −1 (k =0, one inflection point). In Fig. 13(b) the distance islonger with one lattice spacing (k = 1, three inflec-tion points). The solution shown in Fig. 13(c) has adistance greater than two lattice spacings (k = 2, fiveinflection points). Finally, Fig. 13(d) illustrates the so-lution with the inter-soliton distance greater than threelattice spacings (k = 3, seven inflection points). Thebinding of the 2π (anti)kinks is realised through thewave radiated by the first (anti)kink and absorbed bythe other one. Each of these bound states has a pre-ferred value of velocitysk, k = 0, 1, 2, . . . for each setof the system parameters. The dependence of the fourvelocitiess0, s1, s2 ands3 on the on-site parameterγis illustrated by Fig. 14. The kink solution exists onlyfor sufficiently strong coupling parameterκ, so thatγ = κ−1 is bounded from above:γ < γk (γ0 = 7.9,γ1 = 3.2, γ2 = 2.0 andγ3 = 0.8). With the growth ofκ (or the decrease of the on-site parameterγ ), eachof the preferred velocitiessk of the (anti)kink propa-gation increases monotonically as shown in Fig. 14.
It should be noticed that the “transparent” veloc-ities sk obtained above cannot equal zero. In otherwords, standing bound states of the topological soli-tons with |Q| = 1 do not exist. As shown above, theexistence of a localised nonlinear vibration (breather)at the soliton centre is necessary for the existence ofthe standing bound state. Of course, the solutions ofthis type should also exist fors > 0, but using the
Fig. 14. Velocitiessk for the (anti)kink with topological chargeQ = ±2 against the on-site parameterγ with α = 0 for k = 0(curve 1),k = 1 (curve 2),k = 2 (curve 3) andk = 3 (curve 4).
pseudo-spectral method, we are able to find only so-lutions of permanent profile.
The solutions with topological charge|Q| = 2 aredynamically stable. The circles in Fig. 13 representthe particle displacements obtained by the numericalsimulations of Eq. (4). The integration time was suffi-ciently large and, as demonstrated in Fig. 13, the finalparticle distributions (shown by circles) exactly coin-cide with the initial soliton profiles (depicted by solidlines).
We also studied the collision of the bound states ofkinks (and antikinks) withα = 0. As illustrated in Fig.15, the interaction picture depends on the parameterγ . For smallγ , our system is close to the integrablesine–Gordon equation and, therefore, the collision isalmost elastic [see Fig. 15(a)]. For largerγ , we arefurther away from the continuous sine–Gordon equa-tion and, consequently, after collision 4π kinks (or an-tikinks) disintegrate into the 2π kinks (antikinks) (seeFig. 15(b)).
The absence of elastic collisions of these boundstates means that our chain is far from being an inte-grable system.
The same effect of the existence of fixed values ofvelocity s was also observed for topological charges|Q| = 3. In this case the bound state is expected toappear due to the three-wave resonance interaction.Some of these solutions have already been obtained inRefs. [1,3]. The non-oscillating kink profiles for thiscase have the similar form as in the case with|Q| = 2.
Fig. 15. Contour plots of collisions of two antikinks with topo-logical chargeQ = −2 for different values ofγ : (a) γ = 0.3,s = 0.906 and (b)γ = 1 ands = 0.8233.

280 A.V. Savin et al. / Physica D 138 (2000) 267–281
6. Discussion and conclusions
We have shown that the uniform propagation ofnar-row (anti)kinks with both monotonic and oscillatingasymptotics can take place in the discrete nonlinearKlein–Gordon chain. The motion of the kinks on anoscillating background (nanopterons) happens for anygiven sub-sonic velocity in the Klein–Gordon latticewith arbitrary on-site potential and the nanopteronsare generic solutions of such a system. From the phys-ical point of view, this motion can be considered asa nonlinear interaction of a kink with a wave propa-gating along the chain. As a result of this interaction,a boundstate of the kink and the wave is formed, sothat the wave “pushes” the kink, on one hand, and thewave appears to be pinned to the kink, on the otherhand. As a result of this kink-wave interaction, thewave velocity is reduced to sub-sonic values. In otherwords, some kind of “self-trapping” of a kink and awave takes place. The numerical simulations of theequations of motion have demonstrated the stability ofsuch a bound (anti)kink-wave state which propagatesas a whole object and has a stationary profile.
The oscillating background is simply a nonlinearperiodic wave which is also a generic solution of thediscrete Klein–Gordon lattice. When the amplitude ofthis nonlinear wave is small, its shape is close to thesolution of the linearised problem. Obviously, becauseof the nonlinear nature of such waves, their dispersionlaw depends on the wave amplitude. These waves re-semble the cnoidal waves in continuous systems, likethe sine–Gordon (SG) model.
The non-oscillating kinks appear as solutions of thenonlinear Klein–Gordon equation for some finite num-ber of preferred values of velocity, if the correspondingtime-independent problem admits discrete (anti)kinksolutions when the energy difference1E (defined inSection 4) is zero. This happens if the convexity ofthe on-site potential is sufficiently large (see Fig. 1).In particular, the potential (2) for anyα > 0 satis-fies such a condition. The fact that moving kinks canhave only discrete velocity spectrum was also con-firmed recently in [24] for modifiedφ4 model whereone explicit kink solution is known. Note, that in Refs.[6,7] some kink-bearing systems without the PN bar-
rier have been obtained. Kink solutions of this modelcan also propagate freely along the lattice. However,they were obtained in the “inverse” way by using ap-propriate discretisations of standard systems, like thecontinuousφ4 or SG models. As a result of such dis-cretisations, the final systems have rather complicatedforms that are not commonly used in physical appli-cations.
In our case we can find the values (points of trans-parency) of the system parameters in the realistic dis-crete nonlinear Klein–Gordon family of models, likethe discrete SG model with a slightly modified on-sitepotential [see Eq. (2)], at which free kink propaga-tion in the lattice occurs. Another important point tonotice is that in contrast to the case of the nonlinearinter-particle interaction (see Ref. [3]), where we wereable to find non-oscillating antikinks (with supersonicor subsonic, but close to 1, velocities), here we obtainboth the kinks and antikinks with subsonic velocitiesand the inter-particle potentialU(r) in this case is har-monic. The non-oscillatingantikink solutions studiedin Ref. [3] exist due to the inter-particle anharmonicityand therefore they have properties of both topologicaland acoustic (lattice) solitons.
The bound states of several simple topological soli-tons of chargeQ = ±1 form solitons of higher charge.They also can move freely and their motion does notrequire any conditions on the convexity of the on-sitepotential. These solutions are formed as a result of theinteraction of two nanopterons in such a way that theiroscillating asymptotics annihilate each other. This typeof the (anti)kink–(anti)kink interaction was first dis-covered by Peyrard and Kruskal [1]. Note that such a“bound” solution with permanent profile does not ex-ist for zero velocity. However, in the simulations of thekink dynamics, we have obtained bound state of twostanding kinks coupled through a breather. The boundstates described here are not possible in the continuousKlein–Gordon model and therefore they are featuresof discreteness in lattice models.
Acknowledgements
One of us (Y.Z.) is grateful to Heriot-Watt Univer-sity for financial support.

A.V. Savin et al. / Physica D 138 (2000) 267–281 281
References
[1] M. Peyrard, M.D. Kruskal, Kink dynamics in the highlydiscrete sine–Gordon system, Physica D 14 (1984) 88–102.
[2] D.B. Duncan, J.C. Eilbeck, H. Feddersen, J.A.D. Wattis,Solitons on lattices, Physica D 68 (1993) 1–11.
[3] Y. Zolotaryuk, J.C. Eilbeck, A.V. Savin, Bound states of latticesolitons and their bifurcations, Physica D 108 (1997) 81–91.
[4] S.J. Orfanidis, Discrete sine–Gordon equations, Phys. Rev. D18 (1978) 3823–3827.
[5] L. Pilloni, D. Levi, The inverse scattering transform forsolving the discrete sine–Gordon equation, Phys. Lett. 92A(1982) 5-8.
[6] J.M. Speight, R.S. Ward, Kink dynamics in a novel discretesine–Gordon system, Nonlinearity 7 (1994) 475–484.
[7] J. Speight, A discreteφ4 system without a Peierls–Nabarrobarrier, Nonlinearity 10 (1997) 1615–1625.
[8] A.R. Bishop, J.A. Krumhansl, S.E. Trullinger, Solitons incondensed matter: a paradigm, Physica D 1 (1980) 1–44.
[9] R. Jackiw, Quantum meaning of classical field theory, Rev.Mod. Phys. 49 (1977) 681–706.
[10] G.L. Alfimov, V.M. Eleonskii, N.E. Kulagin, N.V. Mitskevich,Dynamics of topological solitons in models with nonlocalinteractions, Chaos 3 (1993) 405–414.
[11] J.P. Boyd, A numerical calculation of a weakly non-localsolitary wave: theφ4 breather, Nonlinearity 3 (1990) 177–195.
[12] S. Flach, C.R. Willis, Discrete breathers, Phys. Rep. 295(1998) 181–264.
[13] J.H. Weiner, W.T. Sanders, Peierls stress and creep of a linearchain, Phys. Rev. A 134 (1964) 1007–1015.
[14] J.H. Weiner, A. Askar, Proton migration in hydrogen-bondedchains, Nature 226 (1970) 842–844.
[15] A. Seeger, P. Schiller, in: W.P. Mason (Ed.), PhysicalAcoustics, vol. IIIA, Chap. 8, Academic Press, New York,1966.
[16] M. Peyrard, M. Remoissenet, Soliton-like excitations in aone-dimensional atomic chain with a non-linear deformablesubstrate potential, Phys. Rev. B 26 (1982) 2886–2899.
[17] R. Hobart, Peierls stress dependence on dislocation width, J.Appl. Phys. 36 (1965) 1944–1948.
[18] R. Hobart, Peierls-Barrier Minima, J. Appl. Phys. 36 (1965)1948–1952.
[19] A.V. Ustinov, M. Cirillo, B.A. Malomed, Fluxon dynamicsin one-dimensional Josephson-junction arrays, Phys. Rev. B47 (1993) 8357–8360.
[20] A.V. Ustinov, B.A. Malomed, S. Sakai, Bunched fluxon statesin one-dimensional Josephson-junction arrays, Phys. Rev. E57 (1998) 11691–11697.
[21] J.C. Eilbeck, R. Flesch, Calculation of families of solitarywaves on discrete lattices, Phys. Lett. A 149 (1990) 200–202.
[22] D.K. Campbell, M. Peyrard, P. Sodano, Kink–antikinkinteractions in the double sine–Gordon equation, Physica D19 (1986) 165–205.
[23] R.K. Dodd, J.C. Eilbeck, J.D. Gibbon, H.C. Morris, Solitonsand Nonlinear Wave Equations, Academic Press, London,1982.
[24] S. Flach, Y. Zolotaryuk, K. Kladko, Moving lattice kinks andpulses: an inverse method, Phys. Rev. E 59 (1999) 6105–6115.