motion&drives - copiti cádiz · rotor y estator de motores con pares similares ... una nueva...
TRANSCRIPT

Motion&Drives
Schneider Electric 2
¿Qué se entiende por MOTION?¿Qué se entiende por MOTION?
• Posicionamiento y sincronización de sistemas o elementos mecánicos, hechos mediante accionamientos eléctricos.
• Enlaces mecánicos de una máquina,son sustituidos por enlaces eléctrico-electrónicos.
• En vez de utilizar un solo motor para mover toda la máquina, se disponen de una serie de motores de menor potencia, accionando las diversas partes de la máquina.
¿Que ventajas nos aporta a las máquinas?¿Que ventajas nos aporta a las máquinas?
• Simplificación mecánica: complejos mecanismos mecánicos de sincronización son eliminados.
• Flexibilidad: los enlaces eléctrico-electrónicos pueden fácilmente ser cambiados mediante software.
• Series cortas de fabricación: el tiempo de acondicionamiento de la máquina para diversos formatos de fabricación de producto se reduce enormemente.
• Adaptabilidad a nuevos productos.
• Sincronización de movimientos (precisión) con el paso de producto es fácil de ejecutar.
Sistemas donde se aplica MOTION
• Empaquetadoras, etiquetadoras (“ Packaging “).
• Maquinaria de la industria de la alimentación.
• Máquinas del textil.
• Impresión flexográfica.
• Máquinas de manipulación del cartón y papel.
• Manipuladores de varios ejes.
• Máquinas de corte por laser, plasma, chorro de agua.
• Robots.

¿Qué se entiende por un servoaccionamiento?
• Es el conjunto drive+motor que convierte pulsos eléctricosen movimientos mecánicos discretos.
• El sistema de regulación funciona en lazo cerrado, necesita siempre de un mecanismo de realimentación de la posición.
motor
measuringdeviceSistema de medición
-
variable controlada posición
variable de referencia drive
+
Un servoaccionamiento debe ofrecer:Un servoaccionamiento debe ofrecer:
• Gran precisión de posicionado.
• Estabilidad de velocidad.
• Alta estabilidad de par.
• Repetitividad del movimiento.
• Elevada respuesta dinámica.
• Configuración sencilla del sistema.
• Bajo coste.

Schneider Electric 7
¿ Que significa Alta Respuesta DinámicaAlta Respuesta Dinámica?
• Posicionado preciso
• Precisión en velocidad
• Capacidad de sobrecarga
• Rango de velocidad
• Par estable
• Comportamiento dinámico
Unas altas prestaciones dinámicas producenprocesos de producción mas rápidos, con másciclos y como consecuencia una mayor eficienciade producción
• Capacidad de sobre-par en momentos puntuales, hasta 3 veces el par nominal, para conseguir aceleraciones / deceleraciones rápidas.
• Alta capacidad de aceleración. Esta característica depende del par y de la inercia del motor.
• Estabilidad de par en un rango amplio de velocidades, incluso a motor parado.
Factores que influyen en la respuesta dinámica

Schneider Electric 9
Peso
Factores que influyen en la respuesta dinámica
Los servomotores son claramente los de menor peso. En particular en sistemas donde el motor se mueve junto con el elementoaccionado un menor peso representa una gran ventaja.
El gráfico muestra el peso de
rotor y estator de motores
con pares similares
Inductionmotor
DCmotor
Servomotor
• Motores Inducción : 8,8 kg/kW• Motores C.C. : 12,7 kg/kW• Servomotores : 5,2 kg/kW
Schneider Electric 10
Inercia
Un motor con un bajo momento de inercia es mas favorable en prestaciones dinámicas.
Tanto mas cuanto mayor sea el momento de inercia de la masa a mover
Vemos que un motor C.C.
Tiene el 467% mas inercia
que uno de inducción, que
tiene un 220% mas que un
servomotorInductionInduction
motormotorDCDC
motormotorServoServomotormotor
Factores que influyen en la respuesta dinámica

Schneider Electric 11
Tiempo de aceleración
El servomotor tiene entre
sus caracteristicas un
tiempo de acceleración
muy bajo incluso con el
par máximo.
Su aceleración es el 1000%
que la del Motor C.C. Y el
400% que el de inducciónInductionInduction
motormotorDCDC
motormotorServoServomotormotor
Factores que influyen en la respuesta dinámica
Schneider Electric 12
Comportamiento dinámico
El servomotor es :
10 veces mas dinámico que el motor de C.C. y
5 veces mas que el de inducción.
InductionInductionmotormotor
DCDCmotormotor
ServoServomotormotor
Factores que influyen en la respuesta dinámica

Tipos de servoaccionamientosTipos de servoaccionamientos
Schneider Electric 14
• Los motores tiene perdidas en el cobre y en el hierro
• En motores con escobillas tenemos hierro y bobinas en el rotor, causando altas temperaturas y limitando susprestaciones.
• Los que no tienen escobillas tienen hierro y bobinas en el estator donde la disipación del calor es mas fácil.
• El diseño del rotor sin escobillas reduce su inercia y permiteuna respuesta dinámica mas rápida.
• La vida de un rotor bobinado es mas corta debido a lasescobillas y el colector.
¿ Por que motores brushless ?

Schneider Electric 15
• El número de aplicaciones de servomotores crecerá en el futuro inmediato.
• Lo hará especialmente en aplicaciones de altaprecisión.
• No todas las aplicaciones requieren un servo.
• El variador de velocidad basado en control de flujovectorial con motor de inducción está mejorando susprestaciones en los últimos tiempos.
• Se trata de una solución mas económica y suficientepara muchas aplicaciones.
• No es previsible que alcance las prestaciones de losservos a corto plazo
ConclusionesConclusiones
Schneider Electric 16
Lexium 05

Schneider Electric 17
●Aspecto externo similar al Altivar 31
●Fácil de elegir●Detección automática de los servomotores BSH●Alta integración: filtro de entrada, funciones de seguridad y
resistencia de frenado incluidos
●Fácil de utilizar, comparte similitud de conexión con Altivar 31●Función de autoajuste●Software PowerSuite 2.6 para configuración, ajuste y monitorización●Configuración básica por medio de display integrado en el equipo
●El rango de potencia 750 W – 6 kW cubre aproximadamente el 80 % de aplicaciones del mercado
Lexium 05
Schneider Electric 18
Talla 2:
( L105 x H143 x D150 )
Talla 3:
( L140 x H180 x D150 )
Talla 4:
( L180 x H232 x D170 )
Tallas y dimensionesTallas y dimensiones
Talla 1:
( L72 x H145 x D140 )
Lexium 05

Schneider Electric 19
Distribución de conectores E/SDistribución de conectores E/S
Alimentación 24 VDC
2 entradas analógicas (Pin11-14)CANopen o Profibus (Pin 21-23)E/S digitales (Pin 31-39)
Encoder servomotor
Conexión RJ45 bus(Modbus & CANopen
o Profibus)
Salida ESIM oEntrada P/D o
Entrada segundo encoder
Resistencia final de linea CANopen
Lexium 05
Schneider Electric 20
PotenciasPotencias
Gama de drives Lexium 05
• De 0,4 a 1,4 kW - 110…120 V monofásico• De 0,75 a 2,5 kW - 200...240 V monofásico• De 0,75 a 3,2 kW - 200…240 V trifásico• De 1,4 a 6 kW - 380…480 V trifásico
Servomotores BSH
• Par nominal de 0,5 a 36 Nm• Velocidad nominal de 1500 a 8000 rpm
Lexium 05

Schneider Electric 21
Características generalesCaracterísticas generales
Baja inercia de los servomotores BSH
Tiempos de respuesta rápidos en los lazos de regulación
Compacto gracias a su nueva tecnología de bobinados de polos salientes
Una combinacióndinámica
Tiempo de respuesta del bucle de corriente
62,5 µs !
Lexium 05
Schneider Electric 22
Una nueva fórmula sin aditivosFiltro CEM de nivel A, con conformidad CE
Función de seguridad «Power Removal» para facilitar la instalación y reducir costes
Resistencia de frenado
Bus de campo CANopen o Profibus DP y comunicación serie Modbus
2 entradas analógicas +/- 10 V
Interfaz para el encoder absoluto SinCos monovueltao multivuelta del servomotor
Interfaz para salida de repetición de pulsos, control P/D o conexión de segundo encoder
Características generalesCaracterísticas generales
Lexium 05

Schneider Electric 23
Una adaptación perfectaen el control del movimiento
Control con precisión y elección de5 modos de operación
Posicionado punto a punto• Movimiento relativo o absoluto• Búsqueda de origen
Control de par o de velocidad
Engranaje electrónico
Movimiento manual
Modo secuencial de 16 movimientos
Características generalesCaracterísticas generales
Lexium 05
Schneider Electric 24
Una total libertadde comunicación
CANopen integrado en la versión LXM05A
• Beneficios de una alta velocidad
Tiempo de respuesta a nuevas consignas de 1 ms!
Versión LXM05B con Profibus DP
• Conexión rápida y fácil a otrosautomatismos industriales
Comunicación serie Modbus integrada
Características generalesCaracterísticas generales
Lexium 05

Schneider Electric 25
Una total libertadde comunicación
Conectado en CANopen a un controlador M238 presenta unafácil solución de bajo coste para aplicaciones «pick and place»
Magelis
M238
CANopen
Características generalesCaracterísticas generales
Lexium 05
Schneider Electric 26
Funcionamiento hasta 50°Csin desclasificación
Formato reducido• 4 tallas de drives para dar respuesta a todas las aplicaciones
Montaje sencillo• Instalación en rail DIN• Utilización de bornes tipo resorte• Conectores acodados orientables en los motores• Freno de estacionamiento opcional• Amplia gama de reductores planetarios
Características generalesCaracterísticas generales
Simplicidad de instalación
Lexium 05
Schneider Electric 27
Conexión para comunicaciónsin hilos Bluetooth
Sencillez de puesta en marchaPowerSuite, una herramienta útil para ayudarte
• Menu arranque rápido la configuración básica delequipo
• Identificación automática de los parámetros delservomotor, gracias a su encoder del tipo SinCosHiperface
• Autoajuste de los lazos de regulación
• Función de seguridad «Power Removal» para suprimir las redundancias electromecánicas y reducir costes
• Función osciloscopio para visualizar las magnitudes eléctricas y mecánicas del movimiento
Software de configuraciónSoftware de configuración
Lexium 05
Schneider Electric 28
Modo de operación: diagrama de estados
●Diagrama de estados:
● La operatividad del servovariador está siempre unida al control del diagramade estados
●El diagrama de estados sirve para saber el estado del servovariador(habilitado, deshabilitado, referenciado, etc. ).● Esta información es disponible desde la palabra de estado 'DCOMstatus'
via:●HMI (por partes) ●El software (Power Suite)●Bus de campo
●Y controlar al servovariador (habilitado, deshabilitado, referenciado, etc. ).● Usando la palabra de control 'DCOMcontrol' via:
●HMI (por partes) ●El software (Power Suite)●Bus de campo●Sistema de control (clase 1-2-3 respuesta al fallo)

Schneider Electric 29
Modo de operación: diagrama de estados
Servo
deshabilitado
Servo
habilitado
Schneider Electric 30
Modo operación: control de velocidad con control de posición
●En control de velocidad con control de posición, el bus de campo suministra la referencia de velocidad, la cual es aplicada con unarampa de aceleración y deceleración.
●La referencia de velocidad es aplicada por ‘PVn_target’ en rpm y puede ser cambiada en movimiento.
●Cualquier referencia de velocidad es aplicada inmediatamente.
Schneider Electric 31
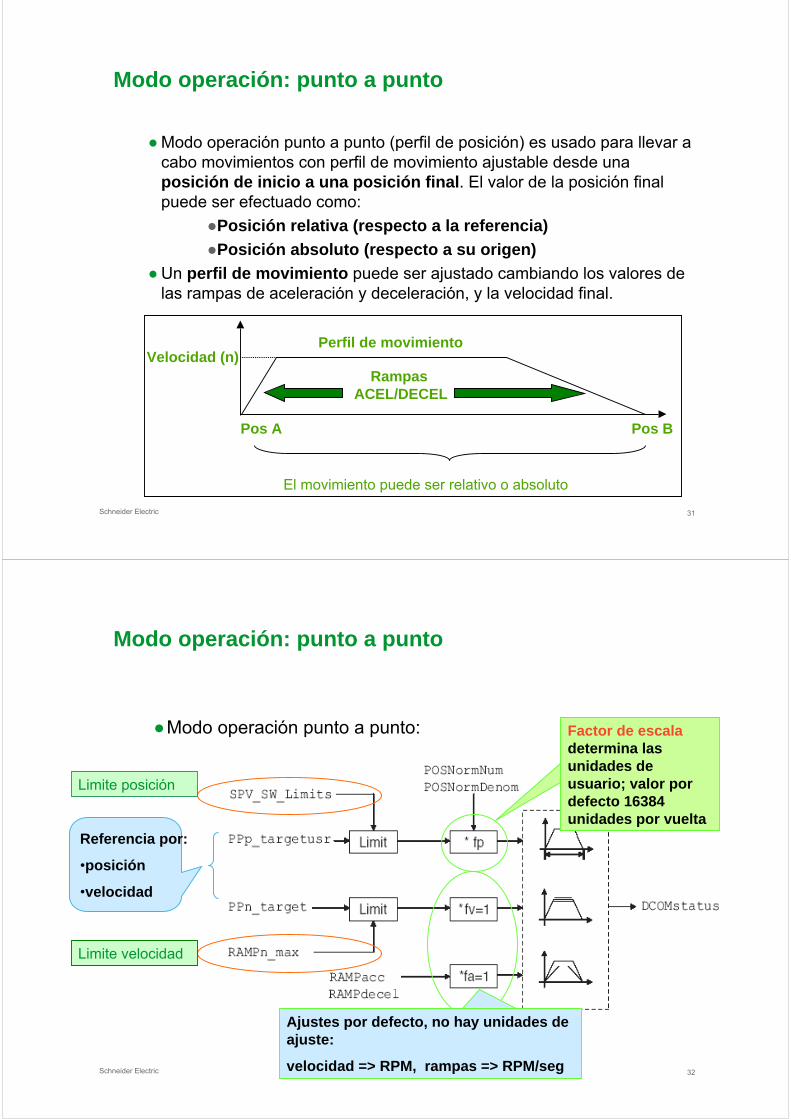
Modo operación: punto a punto
●Modo operación punto a punto (perfil de posición) es usado para llevar a cabo movimientos con perfil de movimiento ajustable desde unaposición de inicio a una posición final. El valor de la posición final puede ser efectuado como:
●Posición relativa (respecto a la referencia)
●Posición absoluto (respecto a su origen)
●Un perfil de movimiento puede ser ajustado cambiando los valores de las rampas de aceleración y deceleración, y la velocidad final.
Pos A Pos B
Velocidad (n)
El movimiento puede ser relativo o absoluto
Rampas ACEL/DECEL
Perfil de movimiento
Schneider Electric 32
Modo operación: punto a punto
●Modo operación punto a punto:
Referencia por:
•posición
•velocidad
Limite velocidad
Limite posición
Factor de escaladetermina lasunidades de usuario; valor pordefecto 16384 unidades por vuelta
Ajustes por defecto, no hay unidades de ajuste:
velocidad => RPM, rampas => RPM/seg

Schneider Electric 33
Modo operación: punto a punto
●Unidades de posición:
● Los ajustes del servovariador por defecto 16384 unidades de usuario/vuelta motor. El movimiento deseado puede ser definido porunidades de usuario, usando los siguientes parámetros:
●POSscaledenom●POSscalenum
●Con ambos parámetros es posible definir exactamente la distancia real necesaria de movimiento por cada vuelta de motor.
Schneider Electric 34
Modo operación: punto a punto
●Límites de posición:●El servovariador opera en módulo +/-2 exp 14 veces la resolución
por vuelta de motor, la resolución por defecto es de 16.384 unids/rev nos da:
Características especiales: en modo Punto a Punto.
Movi.relativo: superando los límites máximos, la actual posición cambia a 0.
Movi.absoluto: comando rechazado 'Parámetro fuera de rango'
2exp 14 x res=> 268 435 455 usr
- 2exp 14 x res=> -268 435 456 usr
- 2exp 14 x res=> -268 435 456 usr
- 2exp 14 x res=> -268 435 456 usr
2exp 14 x res=> 268 435 455 usr
- 2exp 14 x res=> -268 435 456 usr
0 usr0 usr
Schneider Electric 35
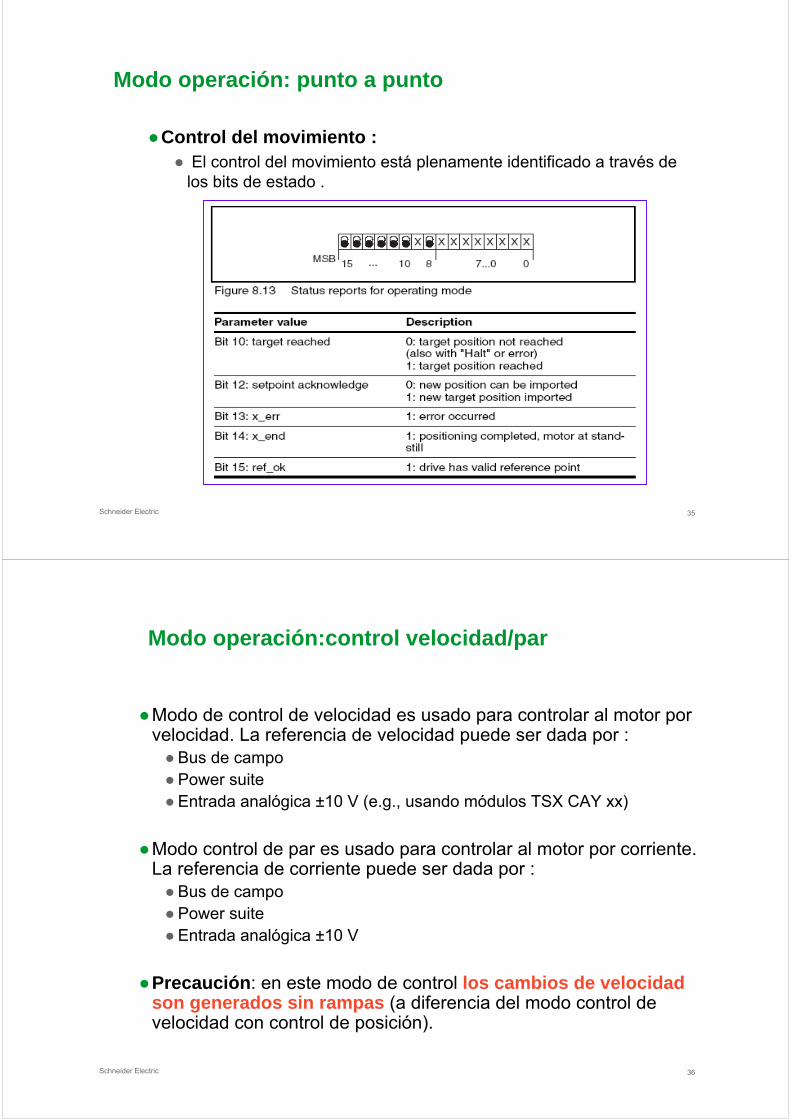
Modo operación: punto a punto
●Control del movimiento :● El control del movimiento está plenamente identificado a través de
los bits de estado .
Schneider Electric 36
Modo operación:control velocidad/par
●Modo de control de velocidad es usado para controlar al motor porvelocidad. La referencia de velocidad puede ser dada por :●Bus de campo ●Power suite●Entrada analógica ±10 V (e.g., usando módulos TSX CAY xx)
●Modo control de par es usado para controlar al motor por corriente. La referencia de corriente puede ser dada por :●Bus de campo ●Power suite●Entrada analógica ±10 V
●Precaución: en este modo de control los cambios de velocidadson generados sin rampas (a diferencia del modo control de velocidad con control de posición).

Schneider Electric 37
Modo operación:control de velocidad (directo )
●Modo control de velocidad.
Referencia de VELOCIDAD . Es elegida usando el parámetroSPEEDreference
Limitación de velocidad o corriente por‘Ana2limmode’
Schneider Electric 38
Referencia de PAR. Es elegida usandoel parámetroCURreference
Modo operación: control de par
●Modo control de par.
Limitación de velocidad o corriente por‘Ana2limmode’
Schneider Electric 39
Modo operación:control velocidad/par
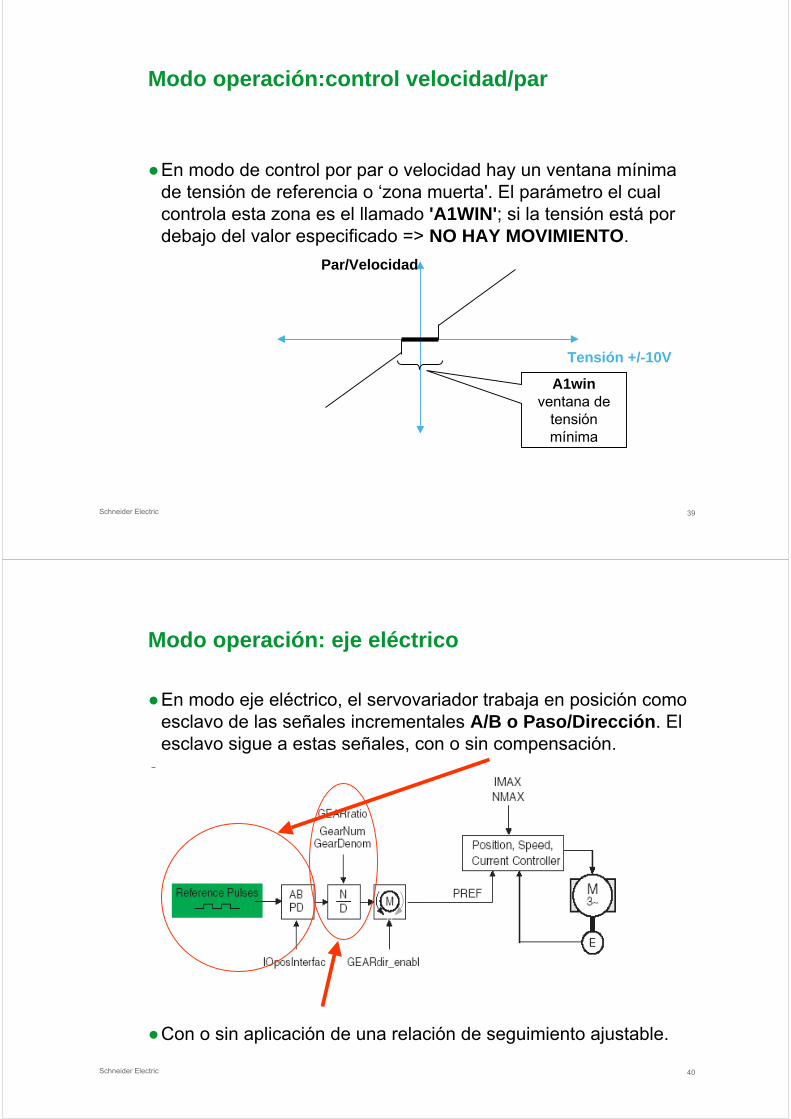
●En modo de control por par o velocidad hay un ventana mínimade tensión de referencia o ‘zona muerta'. El parámetro el cualcontrola esta zona es el llamado 'A1WIN'; si la tensión está pordebajo del valor especificado => NO HAY MOVIMIENTO.
Par/Velocidad
Tensión +/-10V
A1win ventana de
tensiónmínima
Schneider Electric 40
Modo operación: eje eléctrico
●En modo eje eléctrico, el servovariador trabaja en posición comoesclavo de las señales incrementales A/B o Paso/Dirección. El esclavo sigue a estas señales, con o sin compensación.
●
●Con o sin aplicación de una relación de seguimiento ajustable.

Schneider Electric 41
Modo operación: eje eléctrico
●Concepto de seguimiento INMEDIATO o seguimiento con integración de una compensación adicional de movimiento.
● En modo eje eléctrico, el servovariador sigue a una referencia desde un equipo externo (señales A/B o paso/dirección).
● Este modo permite dos tipos de seguimiento: ●Modo seguimiento INMEDIATO.
– En este modo, el servovariador solamente toma en cuenta las señales del encoder maestro, si está listo paraseguir (servovariador habilitado, y listo para arrancar).
●Modo seguimiento con integración de una compensaciónadicional de movimiento.●En este modo, el servovariador toma las señales en cuenta del encoder maestro tan pronto como el modo seguidor es activado, incluso si el servovariador está en estado de HALT o QUICKSTOP. Los incrementosdel encoder son almacenados y añadidos a la referencia o consigna, cuando el modo es reactivado.
Schneider Electric 42
Modo operación: eje eléctrico
●E.g.: Seguimiento INMEDIATO: el seguimiento del eje eléctricoes realizado parando el esclavo (con la entrada de HALT), sin pararde mover el maestro.
Acción sobre entrada HALT:
la posición se para
Esclavo sigue
con relación 1
La entrada HALT es activada, seguidor eje eléctrico
es habilitado de nuevo, pero sin compensación de la posición
Schneider Electric 43
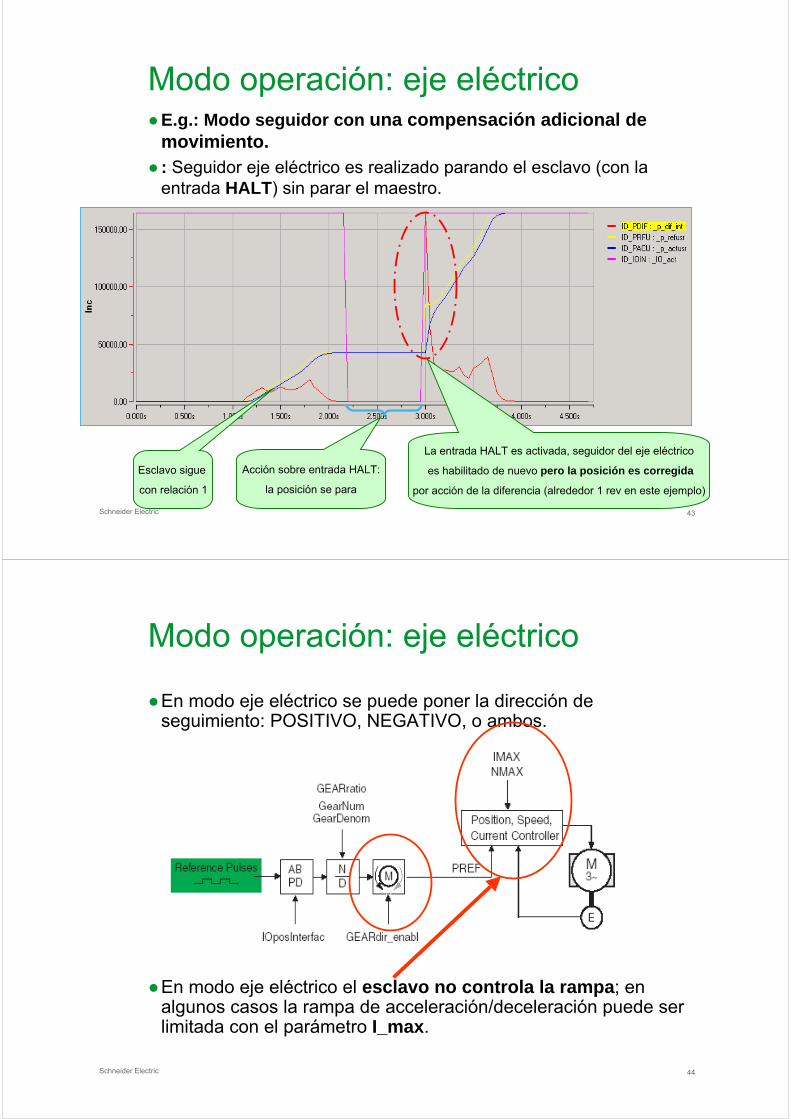
Modo operación: eje eléctrico●E.g.: Modo seguidor con una compensación adicional de
movimiento.● : Seguidor eje eléctrico es realizado parando el esclavo (con la
entrada HALT) sin parar el maestro.
Acción sobre entrada HALT:
la posición se para
Esclavo sigue
con relación 1
La entrada HALT es activada, seguidor del eje eléctrico
es habilitado de nuevo pero la posición es corregida
por acción de la diferencia (alrededor 1 rev en este ejemplo)
Schneider Electric 44
Modo operación: eje eléctrico
●En modo eje eléctrico se puede poner la dirección de seguimiento: POSITIVO, NEGATIVO, o ambos.
●En modo eje eléctrico el esclavo no controla la rampa; en algunos casos la rampa de acceleración/deceleración puede ser limitada con el parámetro I_max.
Schneider Electric 45
Modo operación: eje eléctrico
● Característica especial de la función habilitación del sentido de giro, GEARdir_enable
● Este parámetro puede ser usado para fijar la dirección de giro: POSITIVO, NEGATIVO, o ambos (valor de fábrica es ambos).
● Dirección positiva:●En este caso el sentido de giro positivo del motor es fijado:
– Si el encoder gira en sentido negativo, el seguimiento es anulado.– El motor arranca el seguimiento de nuevo después de hacer una
corrección positiva, viniendo de las vueltas del sentido negativo.● Dirección negativa:
●En este caso el sentido de giro negativo del motor es fijado :– Si el encoder gira en sentido positivo, el seguimiento es anulado.– El motor arranca el seguimiento de nuevo después de hacer una
corrección negativa, viniendo de las vueltas del sentido positivo.
Schneider Electric 46
Modo operación: eje eléctrico
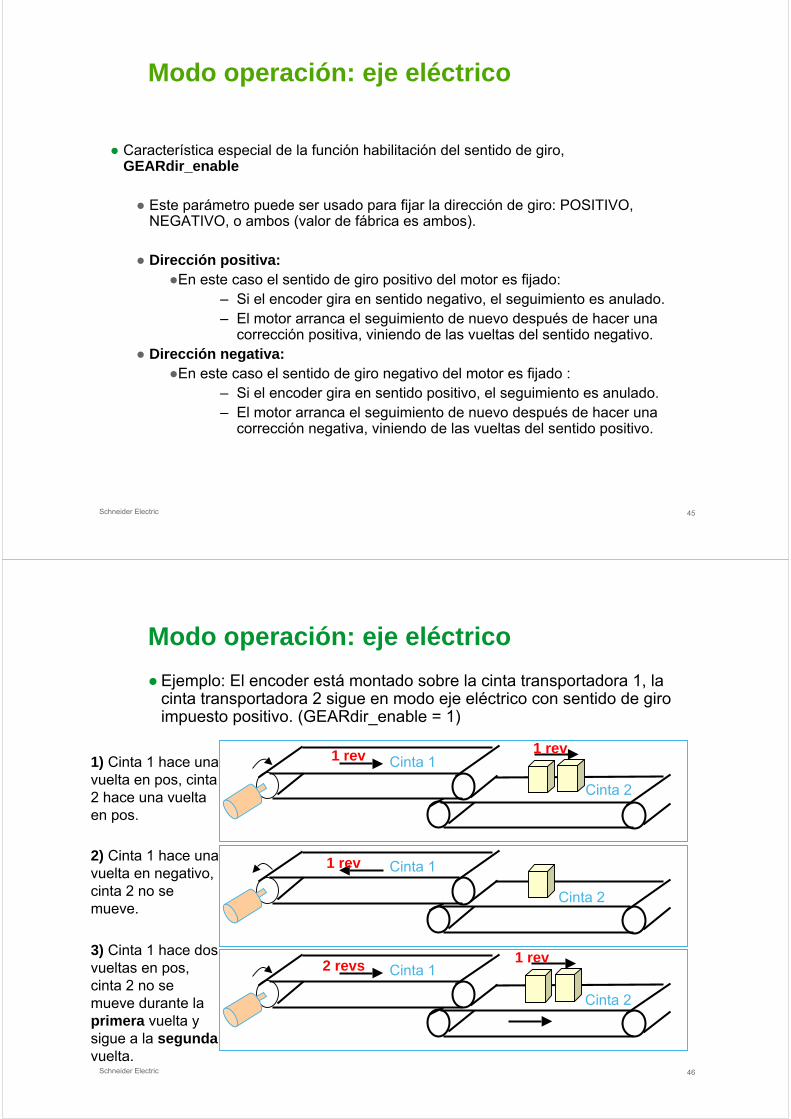
●Ejemplo: El encoder está montado sobre la cinta transportadora 1, la cinta transportadora 2 sigue en modo eje eléctrico con sentido de giroimpuesto positivo. (GEARdir_enable = 1)
Cinta 1
Cinta 2
1) Cinta 1 hace unavuelta en pos, cinta2 hace una vueltaen pos.
2) Cinta 1 hace unavuelta en negativo, cinta 2 no se mueve.
Cinta 1
Cinta 2
Cinta 1
1 rev
2 revs
1 rev
1 rev
1 rev
Cinta 2
3) Cinta 1 hace dos vueltas en pos, cinta 2 no se mueve durante la primera vuelta y sigue a la segundavuelta.
Schneider Electric 47
Diferentes ajustes del modo: Homing
●Modo Homing puede ser usado para definir una posición absoluta:
● 1 – Conforme al flanco de subida de las entradas digitales (LIMP, LIMN o REF).
●Movimiento positivo sobre final de carrera LIMP
●Movimiento negativo sobre final de carrera LIMN
●Movimiento positivo o negativo sobre entrada REF
● 2 – Forzando la posición actual (valor máximo +/- 2exp14 x resolución). Home inmediato.
● Nota:LEXIUM 05 usa realimentación de encoder absoluto en el motor, pero en el caso de encoder monovuelta, LEXIUM 05 se ha de referenciar en el momento de una pérdida de tensión de alimentación.
Schneider Electric 48
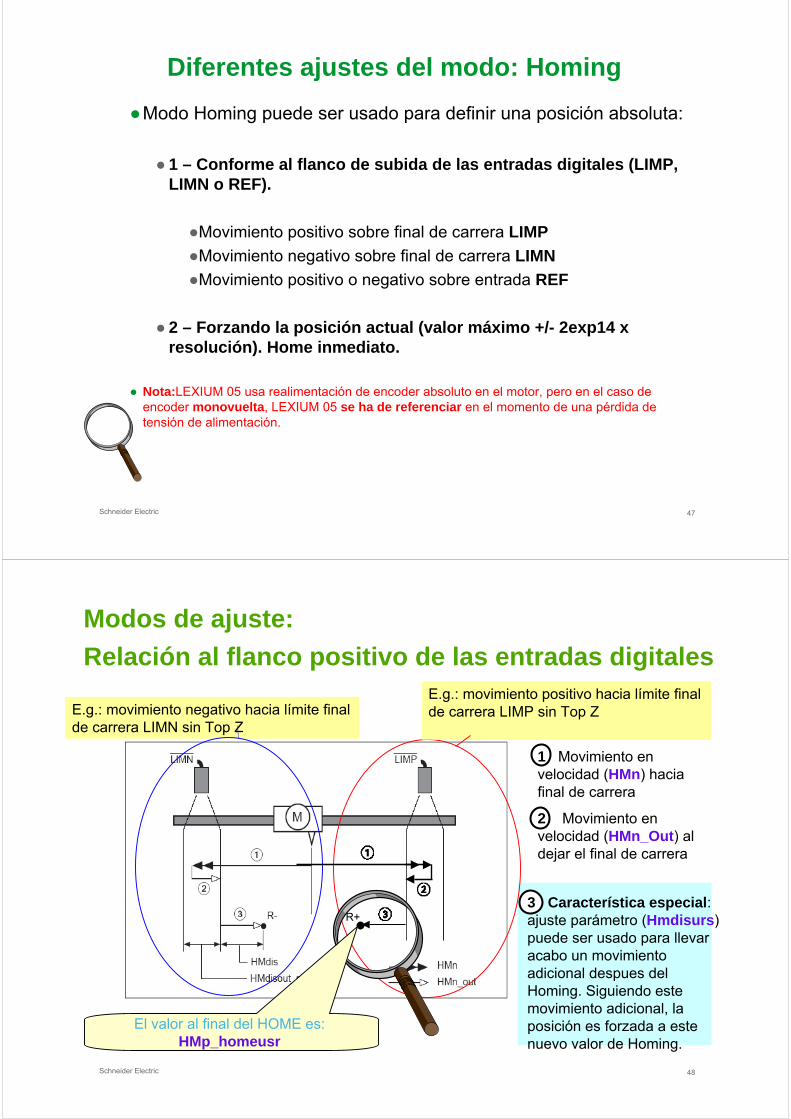
E.g.: movimiento negativo hacia límite final de carrera LIMN sin Top Z
E.g.: movimiento positivo hacia límite final de carrera LIMP sin Top Z
R+
1 Movimiento en velocidad (HMn) haciafinal de carrera
2 Movimiento en velocidad (HMn_Out) al dejar el final de carrera
Modos de ajuste:
Relación al flanco positivo de las entradas digitales
3 Característica especial: ajuste parámetro (Hmdisurs) puede ser usado para llevaracabo un movimientoadicional despues del Homing. Siguiendo estemovimiento adicional, la posición es forzada a estenuevo valor de Homing.
El valor al final del HOME es: HMp_homeusr
Schneider Electric 49
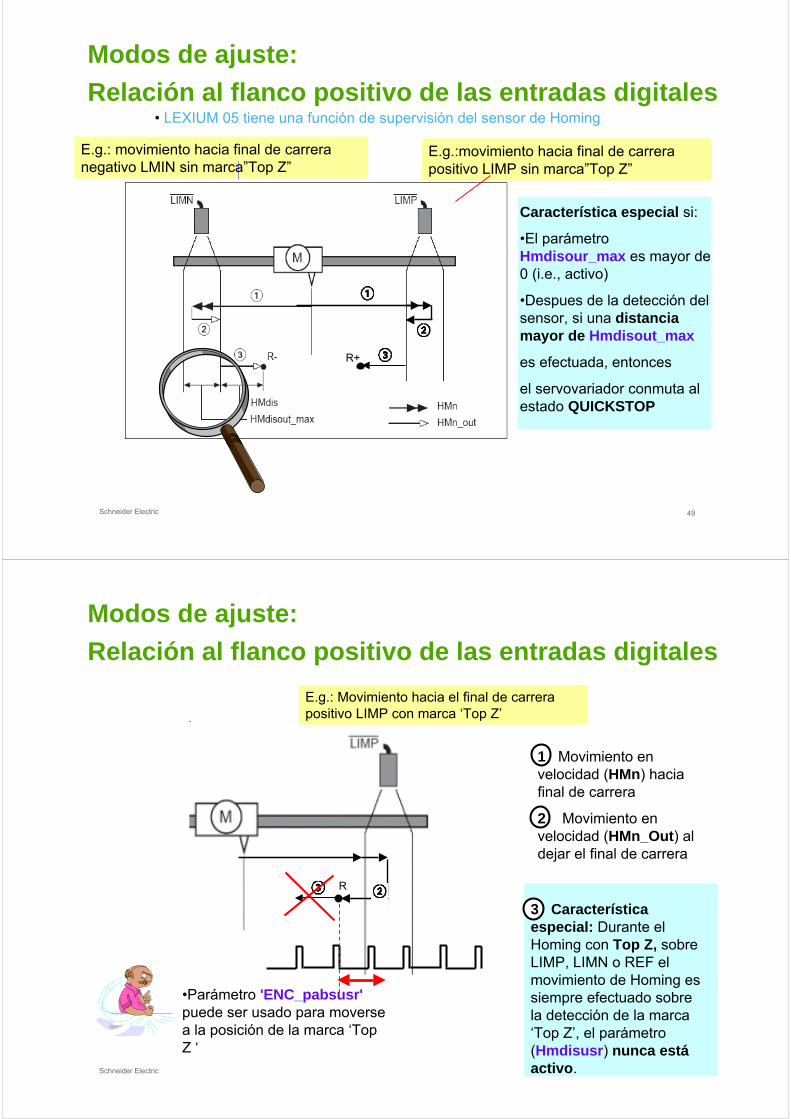
E.g.: movimiento hacia final de carreranegativo LMIN sin marca”Top Z”
E.g.:movimiento hacia final de carrerapositivo LIMP sin marca”Top Z”
R+
Característica especial si:
•El parámetroHmdisour_max es mayor de 0 (i.e., activo)
•Despues de la detección del sensor, si una distanciamayor de Hmdisout_max
es efectuada, entonces
el servovariador conmuta al estado QUICKSTOP
Modos de ajuste:
Relación al flanco positivo de las entradas digitales• LEXIUM 05 tiene una función de supervisión del sensor de Homing
Schneider Electric 50
E.g.: Movimiento hacia el final de carrerapositivo LIMP con marca ‘Top Z’
1 Movimiento en velocidad (HMn) haciafinal de carrera
2 Movimiento en velocidad (HMn_Out) al dejar el final de carrera
3 Característicaespecial: Durante el Homing con Top Z, sobreLIMP, LIMN o REF el movimiento de Homing essiempre efectuado sobrela detección de la marca‘Top Z’, el parámetro(Hmdisusr) nunca estáactivo.
R
•Parámetro 'ENC_pabsusr'puede ser usado para moversea la posición de la marca ‘Top Z ‘
Modos de ajuste:
Relación al flanco positivo de las entradas digitales
Schneider Electric 51
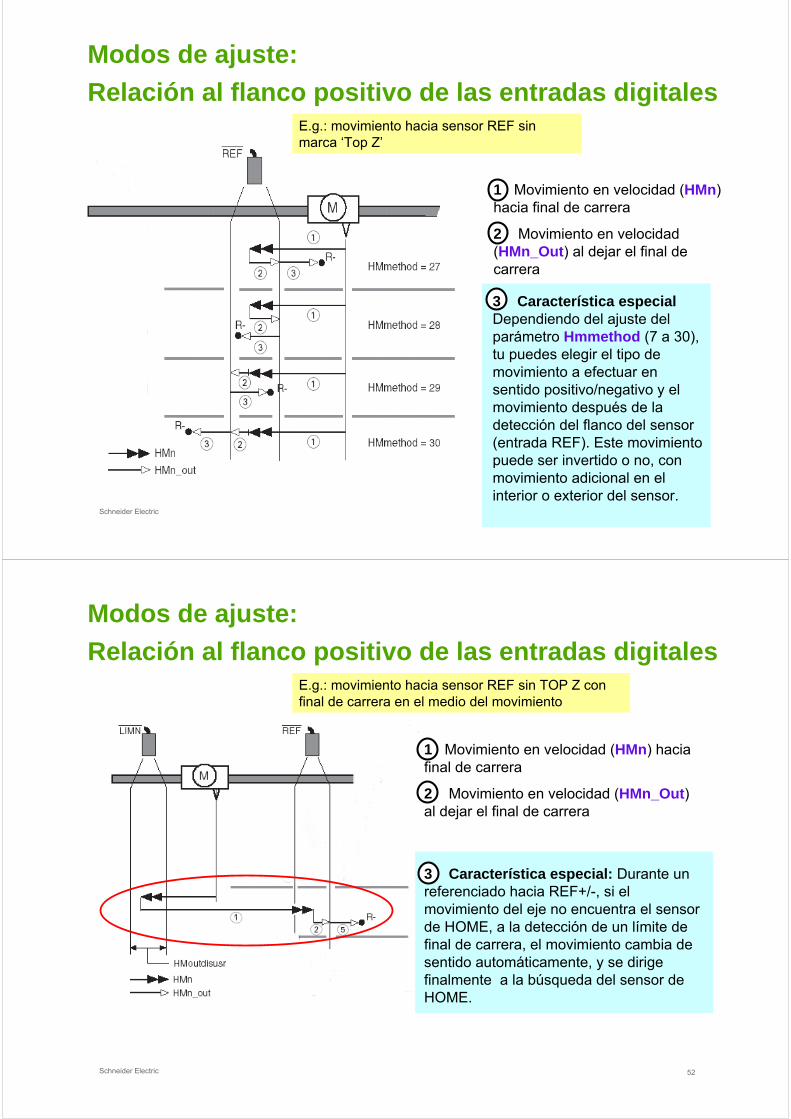
1 Movimiento en velocidad (HMn) hacia final de carrera
2 Movimiento en velocidad(HMn_Out) al dejar el final de carrera
E.g.: movimiento hacia sensor REF sin marca ‘Top Z’
3 Característica especialDependiendo del ajuste del parámetro Hmmethod (7 a 30), tu puedes elegir el tipo de movimiento a efectuar en sentido positivo/negativo y el movimiento después de la detección del flanco del sensor (entrada REF). Este movimientopuede ser invertido o no, con movimiento adicional en el interior o exterior del sensor.
Modos de ajuste:
Relación al flanco positivo de las entradas digitales
Schneider Electric 52
1 Movimiento en velocidad (HMn) haciafinal de carrera
2 Movimiento en velocidad (HMn_Out) al dejar el final de carrera
E.g.: movimiento hacia sensor REF sin TOP Z con final de carrera en el medio del movimiento
3 Característica especial: Durante unreferenciado hacia REF+/-, si el movimiento del eje no encuentra el sensor de HOME, a la detección de un límite de final de carrera, el movimiento cambia de sentido automáticamente, y se dirigefinalmente a la búsqueda del sensor de HOME.
Modos de ajuste:
Relación al flanco positivo de las entradas digitales
Schneider Electric 53
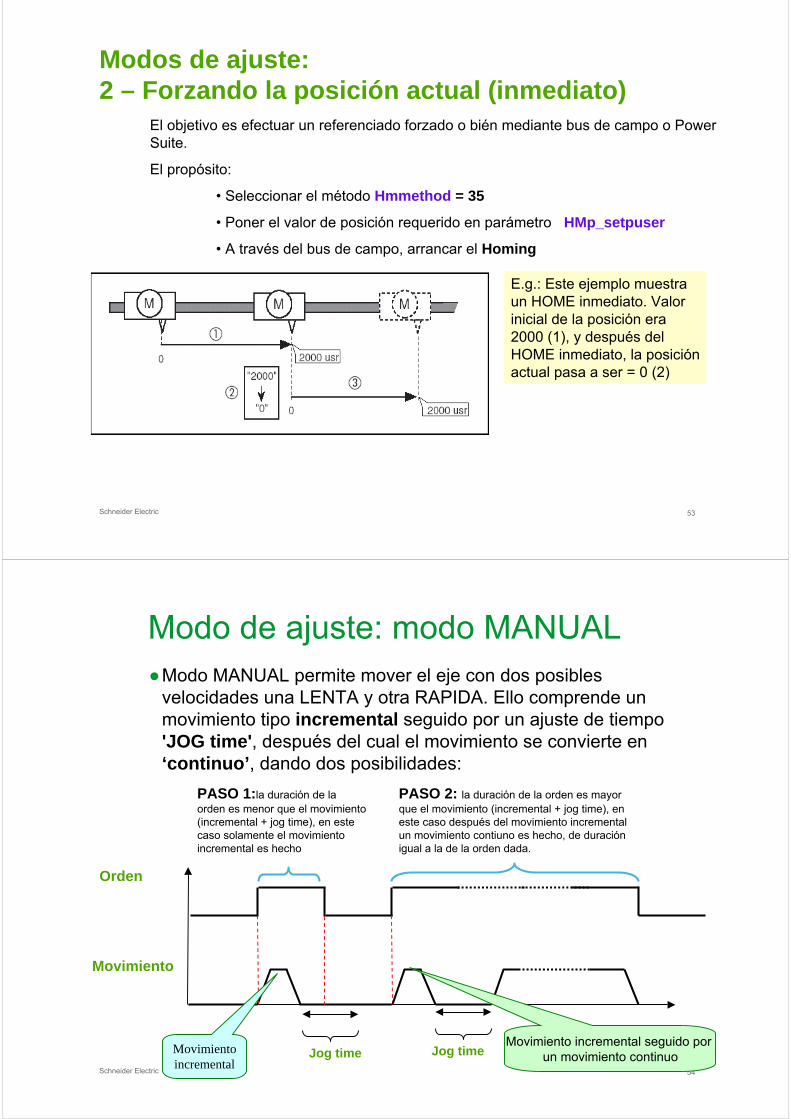
Modos de ajuste:2 – Forzando la posición actual (inmediato)
El objetivo es efectuar un referenciado forzado o bién mediante bus de campo o Power Suite.
El propósito:
• Seleccionar el método Hmmethod = 35
• Poner el valor de posición requerido en parámetro HMp_setpuser
• A través del bus de campo, arrancar el Homing
E.g.: Este ejemplo muestraun HOME inmediato. Valorinicial de la posición era2000 (1), y después del HOME inmediato, la posiciónactual pasa a ser = 0 (2)
Schneider Electric 54
Modo de ajuste: modo MANUAL●Modo MANUAL permite mover el eje con dos posibles
velocidades una LENTA y otra RAPIDA. Ello comprende un movimiento tipo incremental seguido por un ajuste de tiempo'JOG time', después del cual el movimiento se convierte en ‘continuo’, dando dos posibilidades:
Orden
Movimiento
Movimientoincremental
PASO 1:la duración de la orden es menor que el movimiento(incremental + jog time), en estecaso solamente el movimientoincremental es hecho
Jog timeJog timeMovimiento incremental seguido por
un movimiento continuo
PASO 2: la duración de la orden es mayor que el movimiento (incremental + jog time), en este caso después del movimiento incremental un movimiento contiuno es hecho, de duraciónigual a la de la orden dada.
Schneider Electric 55
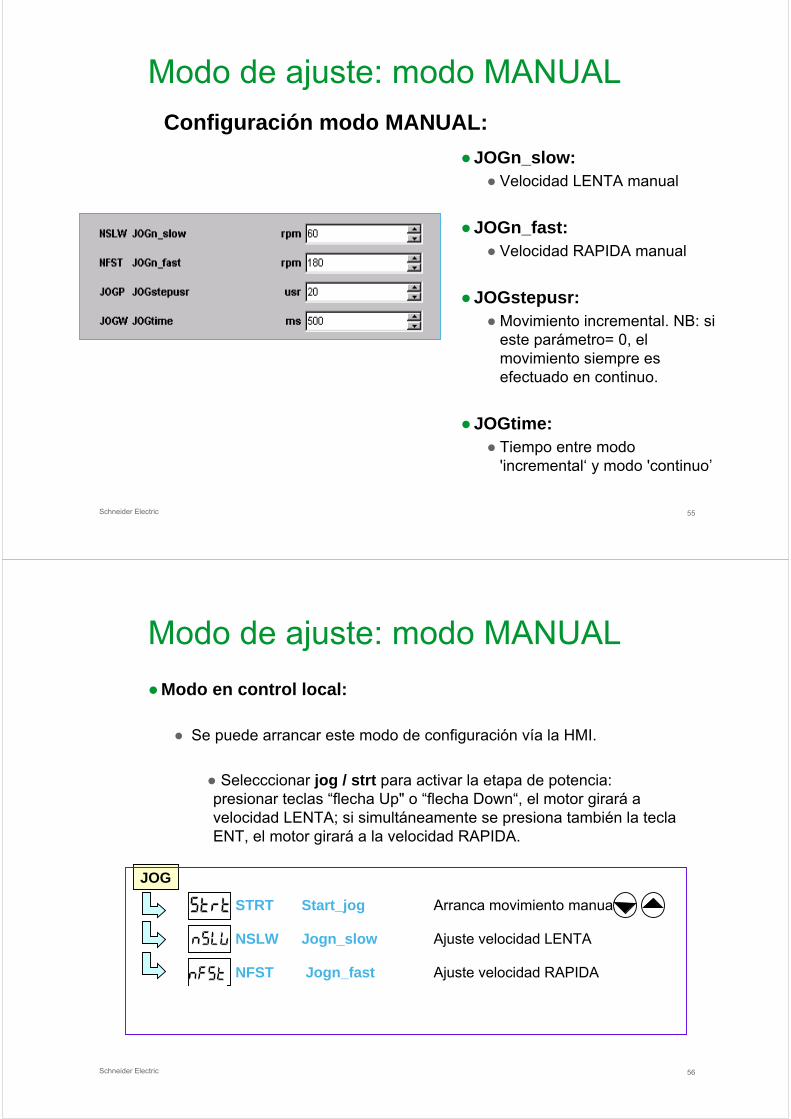
Modo de ajuste: modo MANUAL
●JOGn_slow: ● Velocidad LENTA manual
●JOGn_fast: ● Velocidad RAPIDA manual
●JOGstepusr: ● Movimiento incremental. NB: si
este parámetro= 0, el movimiento siempre esefectuado en continuo.
●JOGtime: ● Tiempo entre modo
'incremental‘ y modo 'continuo’
Configuración modo MANUAL:
Schneider Electric 56
Modo de ajuste: modo MANUAL
●Modo en control local:
● Se puede arrancar este modo de configuración vía la HMI.
● Selecccionar jog / strt para activar la etapa de potencia: presionar teclas “flecha Up" o “flecha Down“, el motor girará a velocidad LENTA; si simultáneamente se presiona también la teclaENT, el motor girará a la velocidad RAPIDA.
STRT Start_jog Arranca movimiento manual
NSLW Jogn_slow Ajuste velocidad LENTA
NFST Jogn_fast Ajuste velocidad RAPIDA
JOG

Schneider Electric 57
Funciones genéricas: Quick Stop
● "Quick Stop" es una función de frenado rápido la cual permite parar el motor debido a dos acciones:
Fallo de clase 1 o 2, o con parada por software via la orden del bit 2 de la palabra de control 'DCOMcontrol‘.
●QUICK STOP es una parada rápida por corriente, no por tiempode rampa.
●Se ajusta a través del parámetro: LIM_I_maxQSTP
●El valor por defecto y el máximo,depende del motor asociado y de la etapa de potencia del servovariador.
NOTA: después de solicitar un QUICK STOP, al trabajar en modo punto a punto, el movimiento es totalmente abortado.
Sería el equivalente a un PARO DE EMERGENCIA
Schneider Electric 58
Funciones genéricas: Halt
● 'HALT' es una función de frenado rápido, la cual para al motor pordiversas acciones:
vía una entrada digital, o orden dada por el bit 8 de la palabra de control 'DCOMcontrol‘, o la cónsola remota HMI.
●HALT es una parada rápida por corriente, no por tiempo de rampa.
●Se ajusta a través del parámetro: LIM_I_maxHALT●El valor por defecto y el máximo, depende del motor asociado y de
la etapa de potencia del servovariador.
NOTA: caso de estar en modo de posicionado punto a punto, después de anular una orden de HALT, el movimiento que se estaba ejecutando, es completado

Schneider Electric 59
Funciones genéricas: inversión sentido de giro
● El sentido de giro puede ser invertido mediante el parámetroPOSdirOfRotat
●Por defecto, la posición incrementa cuando el motor gira en sentidohorario (sentido positivo).
Atención: si el sentido de giro es invertido, los límites de final de carrera LIMP y LIMN, también deberán ser cambiados de posición.
Sentido horario
Pos +
LIMP
LIMN
Sentido antihorario
Pos -
LIMP
LIMN
Schneider Electric 60
Funciones genéricas: auto ajuste
● El sistema de auto ajuste, sirve para poder optimizar las ganancias de lazos de velocidad y posición.
●Se determina la inercia del sistema de forma dinámica:
• Se hace girar el motor a una velocidad aprox. de 200 rpm, y aquí se determina el par de carga (M.Load), haciendo una lectura de la corriente enviada al motor.
• Aplicando un par constante, la velocidad debe variar linealmentesegún la ley:
M - M.Load = J . (dw/dt)
Por lo tanto observando la evolución de la velocidad, es posiblecalcular la inercia del sistema

Schneider Electric 61
Funciones genéricas: auto ajuste
● Una vez efectuado el auto ajuste se ponen las ganancias de los lazosde velocidad y posición.
●Por su puesto, si estos valores se desean ser cambiados, puedehacerse sin ningún problema.
●Hay un parámetro específico llamado AT_gain el cual es ajustado unavez hecho el auto ajuste en el entorno del 100%. Si este parámetro esvariado, el ajuste del sistema en cuanto a respuesta dinámica se puedehacer más rígido o más suave. Si se incrementa el valor el sistema esmás rígido, y si se decrementa se hace más suave.
Schneider Electric 62
Funciones genéricas: auto ajuste
● Parámetros que se pueden ajustar antes de efectuar la orden de ejecución del auto ajuste:
●AT_dir: elección del sentido de giro para hacer el auto ajuste.
●AT_n_ref: escalón de velocidad al arrancar el proceso de auto ajuste.
●AT_dismax: distancia de movimiento que hará el motor en el proceso de auto ajuste.
●AT_mechanics: tipo de acoplamiento entre carga y motor.
●AT_wait: tiempo de espera entre paso y paso del procesode auto tuning.

Schneider Electric 63
Oferta Motion
Controladoras de ejes
Paso a paso Servo
Ejes simples Ejes múltiples
Drives y Motores
Guías lineales
Integrados
Schneider Electric 64
Lexium Controller

Schneider Electric 65
1. Eje simple
2. Ejes coordinados
3. Perfiles de leva (tablas CAM)
4. Ejes sincronizados e interpolación
X
Z Y
X
Z Y
Lexium ControllerTipos de control de movimientoTipos de control de movimiento
Schneider Electric 66
Lexium ControllerOferta controladoras de ejesOferta controladoras de ejes

Schneider Electric 67
●Gestión multitarea
●Tarea master sincronizada con el bus Motion●Hasta 8 ejes reales sincronizados
● Tiempo de ciclo: 2 ms para 4 ejes, 4 ms para 8 ejes
● +1 eje remoto para el encoder master externo
●Tareas auxiliares de ejecución cíclica● Tiempo de ciclo configurable
●Tareas de eventos lanzadas por E/S
Lexium ControllerFuncionesFunciones
Schneider Electric 68
●Tiempo de ejecución de 120 µs para 1000 líneas
de programa●60% lógica booleana
●20% aritmética de coma fija
●20% aritmética de coma flotante
●Memoria ● 1 Mbyte de RAM para programa y datos
● 1 Mbyte de FLASH EPROM para programa
● 60 Kbytes de RAM no volátil (NVRAM) para datos
●Reloj en tiempo real
Lexium ControllerFuncionesFunciones

Schneider Electric 69
Alimentación 24V
Panel frontal
Ethernet
Motion bus
SL / Modbus
CANopenautomatización
Encoder externo
Conector E/S HE10
Alimentación encoder externo
Lexium ControllerHardwareHardware
Schneider Electric 70
●Funciones●Para sincronizar diferentes ejes●El encoder externo es considerado
como un eje por el LMC
●Encoders incrementales● 1 MHz●Señales RS422
●Encoders SSI
●Alimentación externa del encoder● 5 Vcc ó 24 Vcc
Conector SUB D15 de alta densidad para encoder
Conector removible para alimentación
Lexium ControllerEntrada encoder externoEntrada encoder externo

Schneider Electric 71
●Compatible con bases Telefast●ABE 7 B20 MPN22
●ABE 7 B20 MPN20
●Cables manufacturados Telefast
Conector E/SHE10 / 26 pines
Lexium ControllerE/S localesE/S locales
Schneider Electric 72
●8 entradas digitales● 24 Vcc (19 a 30 Vcc)
●8 salidas digitales● 24 Vcc (19 a 30 Vcc)
● 200 mA
●2 entradas de captura TP1 y TP2 ● 24 Vcc
● Tiempo de muestreo: 30 µs
●2 entradas de eventos EI1 y EI2● 24 Vcc
● Tiempo de muestreo máximo: 1 ms
Conector E/SHE10 / 26 pines
Lexium ControllerE/S localesE/S locales
Schneider Electric 73
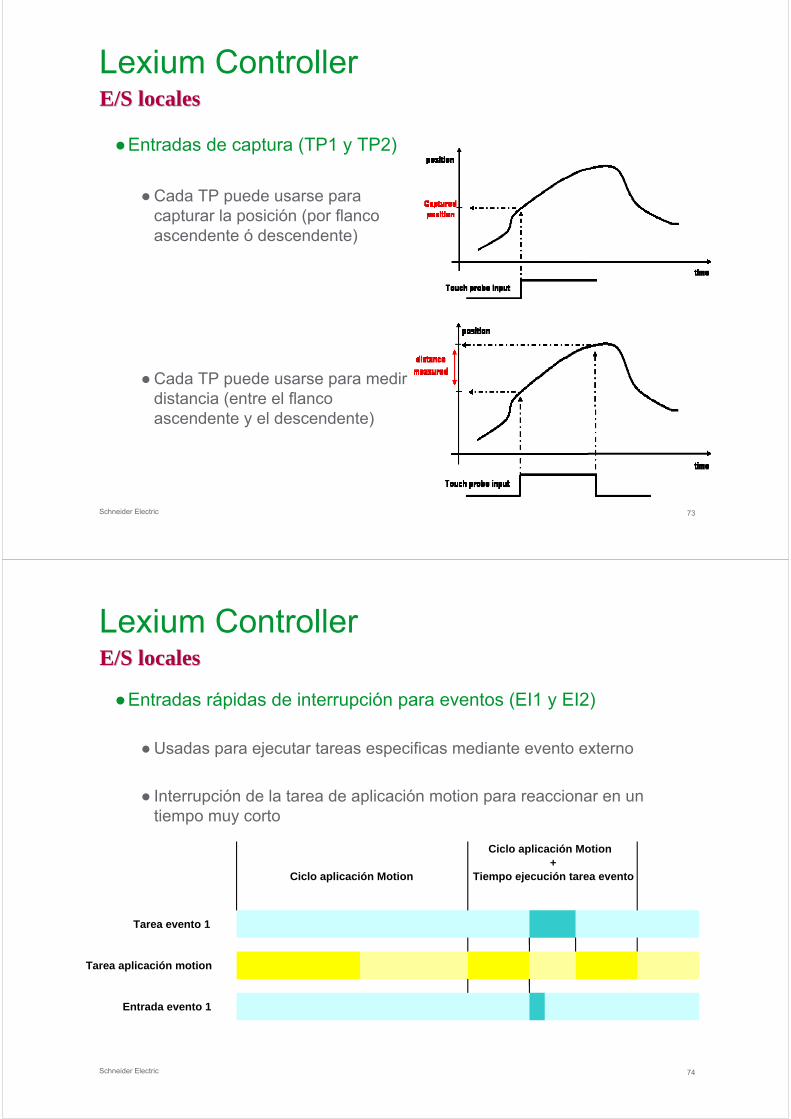
●Entradas de captura (TP1 y TP2)
●Cada TP puede usarse para capturar la posición (por flanco ascendente ó descendente)
●Cada TP puede usarse para medir distancia (entre el flanco ascendente y el descendente)
Lexium ControllerE/S localesE/S locales
Schneider Electric 74
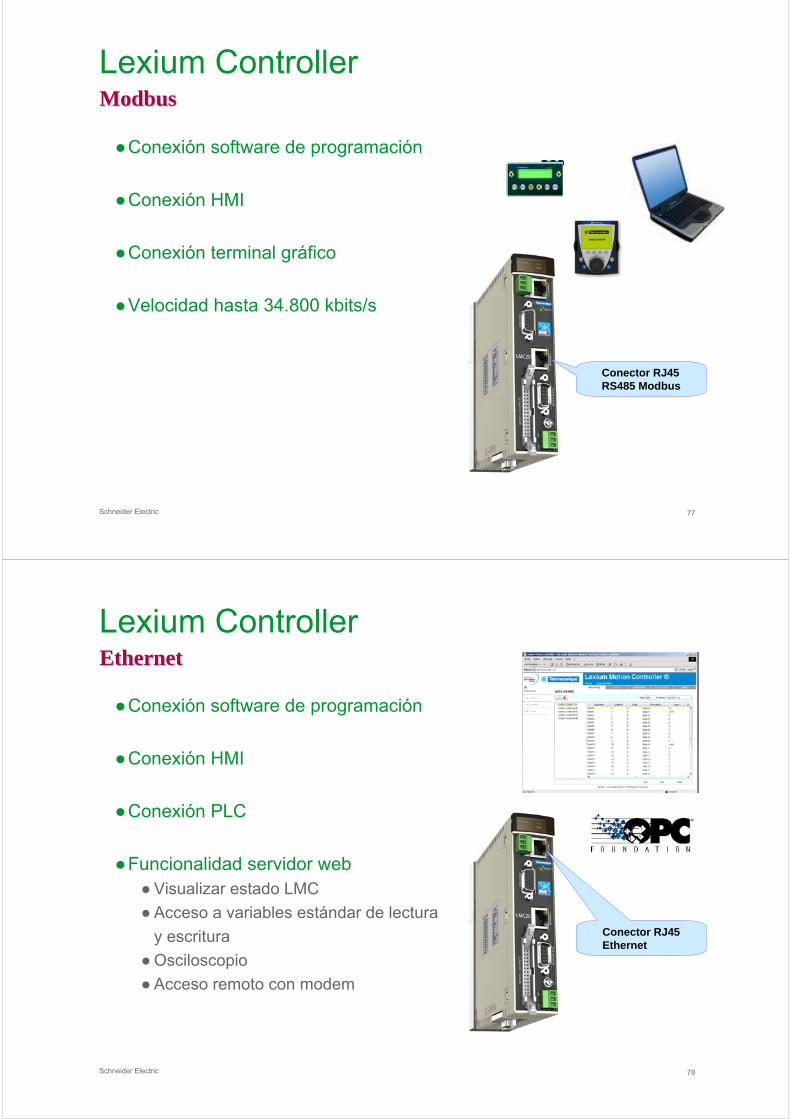
●Entradas rápidas de interrupción para eventos (EI1 y EI2)
●Usadas para ejecutar tareas especificas mediante evento externo
● Interrupción de la tarea de aplicación motion para reaccionar en un tiempo muy corto
Tiempo ejecución tarea evento
Ciclo aplicación Motion+
Ciclo aplicación Motion
Entrada evento 1
Tarea evento 1
Tarea aplicación motion
Lexium ControllerE/S localesE/S locales

Schneider Electric 75
●Muy ergonómico y fácil de usar
●Menor tiempo para los primeros movimientos
●Carga y descarga de la configuración completa
Lexium ControllerTerminal gráficoTerminal gráfico
Schneider Electric 76
Ether
net
Motion Bus
Modbus
CANopen
Profibus/DeviceNet
Lexium ControllerComunicacionesComunicaciones
Schneider Electric 77
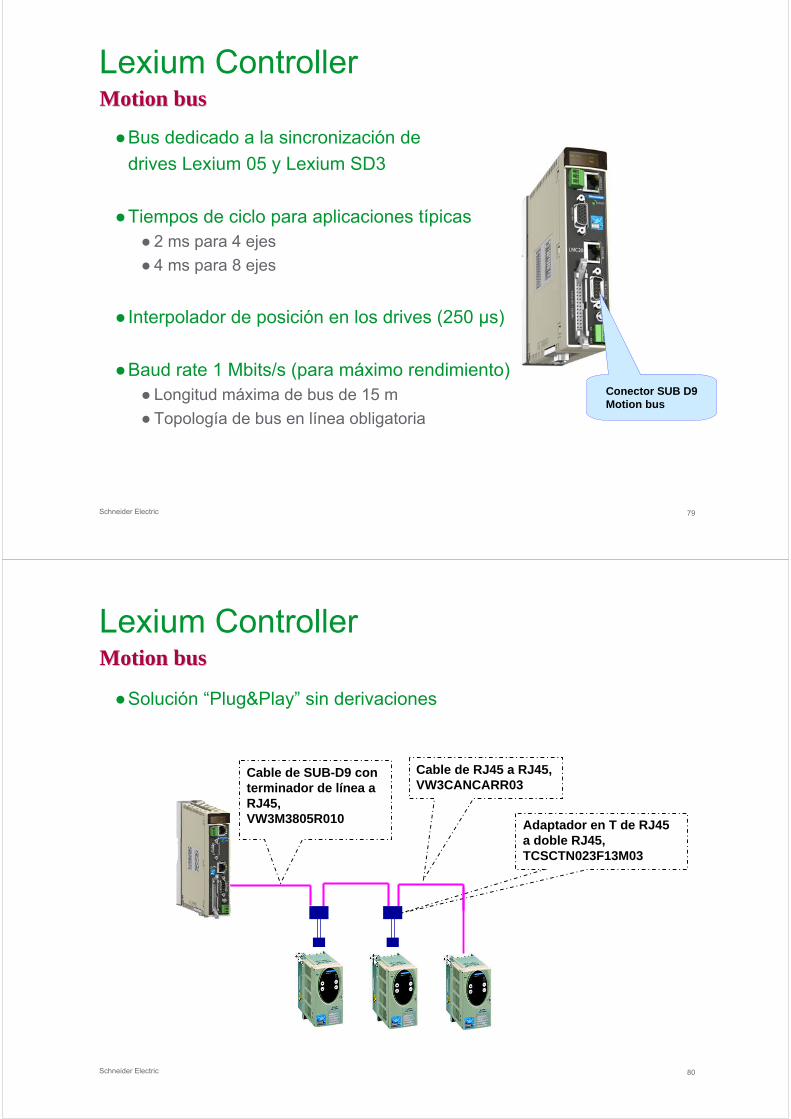
●Conexión software de programación
●Conexión HMI
●Conexión terminal gráfico
●Velocidad hasta 34.800 kbits/s
Conector RJ45 RS485 Modbus
Lexium ControllerModbusModbus
Schneider Electric 78
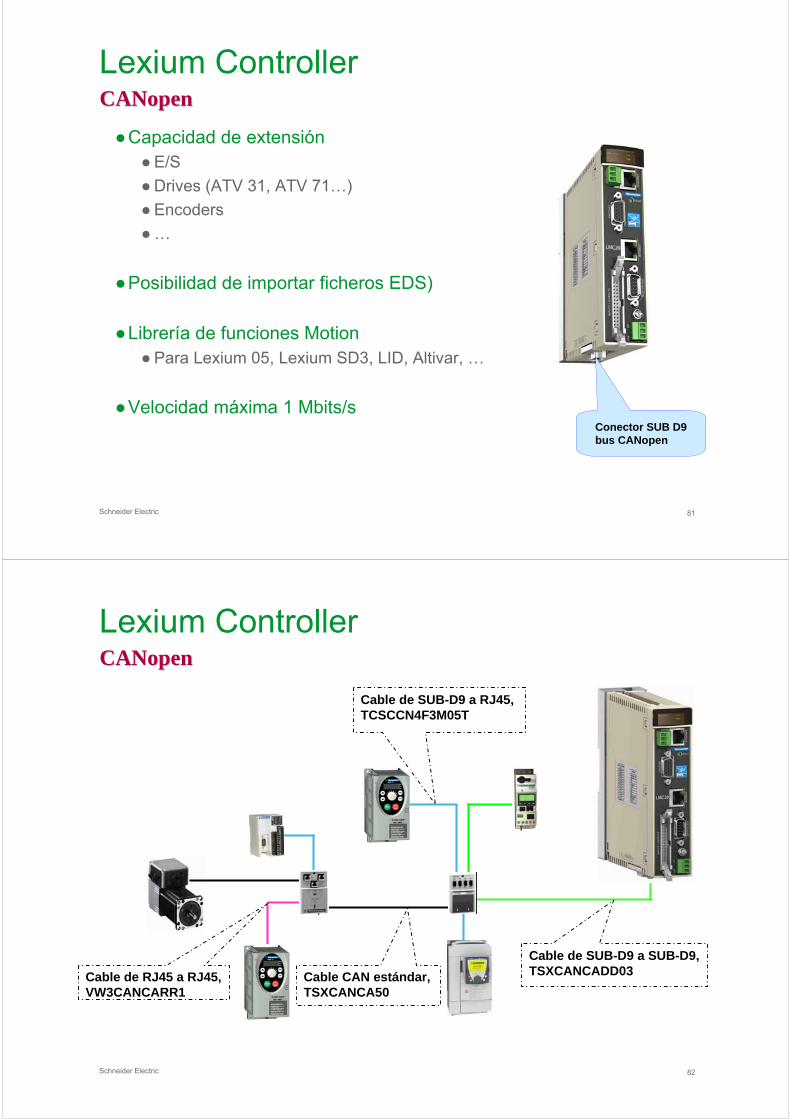
●Conexión software de programación
●Conexión HMI
●Conexión PLC
●Funcionalidad servidor web●Visualizar estado LMC
●Acceso a variables estándar de lectura
y escritura
●Osciloscopio
●Acceso remoto con modem
Conector RJ45 Ethernet
Lexium ControllerEthernetEthernet
Schneider Electric 79
●Bus dedicado a la sincronización de
drives Lexium 05 y Lexium SD3
●Tiempos de ciclo para aplicaciones típicas● 2 ms para 4 ejes
● 4 ms para 8 ejes
● Interpolador de posición en los drives (250 µs)
●Baud rate 1 Mbits/s (para máximo rendimiento)● Longitud máxima de bus de 15 m
● Topología de bus en línea obligatoria
Conector SUB D9Motion bus
Lexium ControllerMotion busMotion bus
Schneider Electric 80
Adaptador en T de RJ45 a doble RJ45,TCSCTN023F13M03
Cable de RJ45 a RJ45, VW3CANCARR03
●Solución “Plug&Play” sin derivaciones
Cable de SUB-D9 con terminador de línea a RJ45,VW3M3805R010
Lexium ControllerMotion busMotion bus
Schneider Electric 81
●Capacidad de extensión●E/S
●Drives (ATV 31, ATV 71…)
●Encoders
●…
●Posibilidad de importar ficheros EDS)
●Librería de funciones Motion●Para Lexium 05, Lexium SD3, LID, Altivar, …
●Velocidad máxima 1 Mbits/s Conector SUB D9bus CANopen
Lexium ControllerCANopenCANopen
Schneider Electric 82
Cable de RJ45 a RJ45,VW3CANCARR1
Cable de SUB-D9 a SUB-D9,TSXCANCADD03
Cable de SUB-D9 a RJ45,TCSCCN4F3M05T
Cable CAN estándar, TSXCANCA50
Lexium ControllerCANopenCANopen

Schneider Electric 83
2 LEDs de diagnóstico
Conector
●Modelo Profibus DP V1 (LMC20A1307)●Conector SUB-D9
●Hasta 12 Mbits
●Selección del tamaño de PPO
●Mensajería no cíclica
●Configuración de dirección con interruptores
●Mismos accesorios de conexión que el ATV71
● 2 LEDs de diagnóstico
●Modelo DeviceNet (LMC20A1309)●Conector con terminales
●Mensajería E/S
●Mensajería explicita (acceso a todas las %MW)
●Configuración de dirección y velocidad con interruptores
Lexium ControllerLMC20ALMC20A
Schneider Electric 84
●Software de programación Motion Pro
●CoDeSys (estándar IEC 61131)
●Utilizado por distintas marcas
●Control monoeje (habilitación, búsqueda de origen, punto a punto, ...) y multieje (engranaje electrónico, perfiles de leva, …)
● Incluye bloques de función PLCopen
Lexium ControllerSoftwareSoftware

Schneider Electric 85
Lexium ControllerArquitecturasArquitecturas
Schneider Electric 86
●Detección del tamaño de producto
●Taladro e inserción al vuelo
●Precisión y alta velocidad necesarias
●Alta flexibilidad
●Proceso continuo
Lexium ControllerMáquina de ensamblajeMáquina de ensamblaje

Schneider Electric 87
Motion Bus
CANopenModbus
●Función de apriete con control de par para inserción
●Función cizalla volante para taladro e inserción
●Sensores de detección de producto en entradas rápidas
●Encoder externo como maestro
Lexium ControllerMáquina de ensamblajeMáquina de ensamblaje
Schneider Electric 88
●Corte a medida con la cuchilla giratoria
●Sincronización de ejes
●Proceso continuo
●Flexibilidad: puede cortar a diferentes medidas, materiales distintos
●Material a tensión constante
Lexium ControllerMáquina de corte al vueloMáquina de corte al vuelo

Schneider Electric 89
●Función cuchilla giratoria (bobina de alimentación como maestro)
●Control de par
●Entradas rápidas de capturaMotion Bus
Modbus
Lexium ControllerMáquina de corte al vueloMáquina de corte al vuelo
Schneider Electric 90
●Los materiales llegan de forma aleatoria
●Agrupamiento de productos en pares
●Colocación de los materiales en cajas mediante un robot de tres ejes
●Proceso continuo
●Etiquetado
●Ciclos rápidos
Lexium ControllerMáquina manipuladoraMáquina manipuladora

Schneider Electric 91
●Encoder externo como maestro
●Detección del producto mediante entradas rápidas
●Función de agrupamiento
●Función de cizalla volante para sincronizar el brazo del robot con la cinta
●Función de cuchilla giratoria para el etiquetado
● Interpolación lineal o circular
Motion Bus
Modbus
CA
Nop
en
Lexium ControllerMáquina manipuladoraMáquina manipuladora
Schneider Electric 92
Make the most of your energy
www.schneiderelectric.es

Schneider Electric 93
Make the most of your energy
www.schneiderelectric.es