most functions cannot be evaluated exactlytrenchea/math1070/math1070_3_interpolation.pdf · most...
TRANSCRIPT

> 4. Interpolation andApproximation
Most functions cannot be evaluated exactly:
√x, ex, lnx, trigonometric functions
since by using a computer we are limited to the use of elementaryarithmetic operations
+,−,×,÷
With these operations we can only evaluate polynomials and rationalfunctions (polynomial divided by polynomials).
4. Interpolation Math 1070

> 4. Interpolation andApproximation
Interpolation
Given pointsx0, x1, . . . , xn
and corresponding values
y0, y1, . . . , yn
find a function f(x) such that
f(xi) = yi, i = 0, . . . , n.
The interpolation function f is usually taken from a restricted class offunctions: polynomials.
4. Interpolation Math 1070

> 4. Interpolation andApproximation > 4.1 Polynomial Interpolation Theory
Interpolation of functions
f(x)
x0, x1, . . . , xn
f(x0), f(x1), . . . , f(xn)
Find a polynomial (or other special function) such that
p(xi) = f(xi), i = 0, . . . , n.
What is the error f(x) = p(x)?
4. Interpolation Math 1070

> 4. Interpolation andApproximation > 4.1.1 Linear interpolation
Linear interpolation
Given two sets of points (x0, y0) and (x1, y1) with x0 6= x1, draw a linethrough them, i.e., the graph of the linear polynomial
x0 x1
y0 y1
`(x) =x− x1
x0 − x1y0 +
x− x0
x1 − x0y1
`(x) =(x1 − x)y0 + (x− x0)y1
x1 − x0(5.1)
We say that `(x) interpolates the value yi at the point xi, i = 0, 1, or`(xi) = yi, i = 0, 1
Figure: Linear interpolation4. Interpolation Math 1070
> 4. Interpolation andApproximation > 4.1.1 Linear interpolation
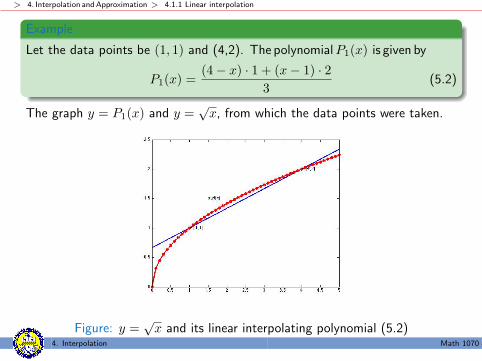
Example
Let the data points be (1, 1) and (4,2). The polynomialP1(x) is given by
P1(x) =(4− x) · 1 + (x− 1) · 2
3(5.2)
The graph y = P1(x) and y =√x, from which the data points were taken.
Figure: y =√x and its linear interpolating polynomial (5.2)
4. Interpolation Math 1070
> 4. Interpolation andApproximation > 4.1.1 Linear interpolation
Example
Obtain an estimate of e0.826 using the function values
e0.82 ·= 2.270500, e0.83 ·= 2.293319
Denote x0 = 0.82, x1 = 0.83. The interpolating polynomial P1(x)interpolating ex at x0 and x1 is
P1(x) =(0.83− x) · 2.270500 + (x− 0.82) · 2.293319
0.01(5.3)
andP1(0.826) = 2.2841914
while the true value s
e0.826 ·= 2.2841638
to eight significant digits.
4. Interpolation Math 1070

> 4. Interpolation andApproximation > 4.1.2 Quadratic Interpolation
Assume three data points (x0, y0), (x1, y1), (x2, y2), with x0, x1, x2 distinct.We construct the quadratic polynomial passing through these points usingLagrange’s folmula
P2(x) = y0L0(x) + y1L1(x) + y2L2(x) (5.4)
with Lagrange interpolation basis functions for quadratic interpolatingpolynomial
L0(x) = (x−x1)(x−x2)(x0−x1)(x0−x2)
L1(x) = (x−x0)(x−x2)(x1−x0)(x1−x2)
L2(x) = (x−x0)(x−x1)(x2−x0)(x2−x1)
(5.5)
Each Li(x) has degree 2 ⇒ P2(x) has degree ≤ 2. MoreoverLi(xj) = 0, j 6= iLi(xi) = 1 for 0 ≤ i, j ≤ 2 i.e., Li(xj) = δi,j =
{1, i = j0, i 6= j
the Kronecker delta function.
P2(x) interpolates the data
P2(x) = yi, i=0,1,2
4. Interpolation Math 1070

> 4. Interpolation andApproximation > 4.1.2 Quadratic Interpolation
Example
Construct P2(x) for the data points (0,−1), (1,−1), (2, 7). Then
P2(x)=(x−1)(x−2)
2· (−1)+
x(x−2)−1
· (−1)+x(x−1)
2· 7 (5.6)
Figure: The quadratic interpolating polynomial (5.6)
4. Interpolation Math 1070
> 4. Interpolation andApproximation > 4.1.2 Quadratic Interpolation
With linear interpolation: obvious that there is only one straight linepassing through two given data points.With three data points: only one quadratic interpolating polynomialwhose graph passes through the points.Indeed: assume ∃Q2(x), deg(Q2) ≤ 2 passing through(xi, yi), i = 0, 1, 2, then it is equal to P2(x). The polynomial
R(x) = P2(x)−Q2(x)
has deg(R) ≤ 2 and
R(xi) = P2(xi)−Q2(xi) = yi − yi = 0, for i = 0, 1, 2
So R(x) is a polynomial of degree ≤ 2 with three roots ⇒ R(x) ≡ 0
4. Interpolation Math 1070

> 4. Interpolation andApproximation > 4.1.2 Quadratic Interpolation
Example
Calculate a quadratic interpolate to e0.826 from the function values
e0.82 ·= 2.27050 e0.83 ·= 2.293319 e0.84 ·= 2.231637
With x0 = e0.82, x1 = e0.83, x2 = e0.84, we have
P2(0.826) ·= 2.2841639
to eight digits, while the true answer e0.826 ·= 2.2841638 andP1(0.826) ·= 2.2841914.
4. Interpolation Math 1070

> 4. Interpolation andApproximation > 4.1.3 Higher-degree interpolation
Lagrange’s Formula
Given n+ 1 data points (x0, y0), (x1, y1), . . . , (xn, yn) with all xi’sdistinct, ∃ unique Pn, deg(Pn) ≤ n such that
Pn(xi) = yi, i = 0, . . . , ngiven by Lagrange’s Formula
Pn(x) =n∑i=0
yiLi(x) = y0L0(x) + y1L1(x) + · · · ynLn(x) (5.7)
where Li(x)=n∏
j=0,j 6=i
x−xjxi−xj
=(x−x0) · · · (x−xi−1)(x−xi+1) · · · (x−xn)(xi−x0) · · · (xi−xi−1)(xi−xi) · · · (xi−xn)
,
where Li(xj) = δij
4. Interpolation Math 1070
> 4. Interpolation andApproximation > 4.1.4 Divided differences
Remark; The Lagrange’s formula (5.7) is suited for theoretical uses,but is impractical for computing the value of an interpolating polynomial:knowing P2(x) does not lead to a less expensive way to compute P3(x).But for this we need some preliminaries, and we start with a discrete versionof the derivative of a function f(x).
Definition (First-order divided difference)
Let x0 6= x1, we define the first-order divided difference of f(x) by
f [x0, x1] =f(x1)− f(x2)
x1 − x2(5.8)
If f(x) is differentiable on an interval containing x0 and x1, then the meanvalue theorem gives
f [x0, x1] = f ′(c), for c between x0 and x1.
Also if x0, x1 are close together, then
f [x0, x1] ≈ f ′(x0 + x1
2
)usually a very good approximation.
4. Interpolation Math 1070

> 4. Interpolation andApproximation > 4.1.4 Divided differences
Example
Let f(x) = cos(x), x0 = 0.2, x1 = 0.3.
Then
f [x0, x1] =cos(0.3)− cos(0.2)
0.3− 0.2·= −0.2473009 (5.9)
while
f ′(x0 + x1
2
)= − sin(0.25) ·= −0.2474040
so f [x0, x1] is a very good approximation of this derivative.
4. Interpolation Math 1070
> 4. Interpolation andApproximation > 4.1.4 Divided differences
Higher-order divided differences are defined recursively
Let x0, x1, x2 ∈ R distinct. The second-order divideddifference
f [x0, x1, x2] =f [x1, x2]− f [x0, x1]
x2 − x0(5.10)
Let x0, x1, x2, x3 ∈ R distinct. The third-order divideddifference
f [x0, x1, x2, x3] =f [x1, x2, x3]− f [x0, x1, x2]
x3 − x0(5.11)
In general, let x0, x1, . . . , xn ∈ R, n+ 1 distinct numbers. Thedivided difference of order n
f [x0, . . . , xn] =f [x1, . . . , xn]− f [x0, . . . , xn−1]
xn − x0(5.12)
or the Newton divided difference.
4. Interpolation Math 1070

> 4. Interpolation andApproximation > 4.1.4 Divided differences
Theorem
Let n ≥ 1, f ∈ Cn[α, β] and x0, x1, . . . , xn n+ 1 distinct numbers in [α, β].Then
f [x0, x1, . . . , xn] = 1n!
f (n)(c) (5.13)
for some unknown point c between the maximum and the minimum ofx0, . . . , xn.
Example
Let f(x) = cos(x), x0 = 0.2, x1 = 0.3, x2 = 0.4.
The f [x0, x1] is given by (5.9), and
f [x1, x2] =cos(0.4)− cos(0.3)
0.4− 0.3·= −0.3427550
hence from (5.11)f [x0, x1, x2]
·=−0.3427550− (−0.2473009)
0.4− 0.2= −0.4772705 (5.14)
For n = 2, (5.13) becomes
f [x0, x1, x2] =12f ′′(c) = −1
2cos(c) ≈ −1
2cos(0.3) ·= −0.4776682
which is nearly equal to the result in (5.14).
4. Interpolation Math 1070

> 4. Interpolation andApproximation > 4.1.5 Properties of divided differences
The divided differences (5.12) have special properties that help simplify workwith them.(1) Let (i0, i1, . . . , in) be a permutation (rearrangement) of the integers(0, 1, . . . , n). It can be shown that
f [xi0 , xi1 , . . . , xin] = f [x0, x1, . . . , xn] (5.15)
The original definition (5.12) seems to imply that the order of x0, x1, . . . , xn
is important, but (5.15) asserts that it is not true.For n = 1
f [x0, x1] =f(x0)− f(x1)
x0 − x1=f(x1)− f(x0)
x1 − x0= f [x1, x0]
For n = 2 we can expand (5.11) to get
f [x0, x1, x2] =f(x0)
(x0 − x1)(x0 − x2)+
f(x1)(x1 − x0)(x1 − x2)
+f(x2)
(x2 − x0)(x2 − x1)
(2) The definitions (5.8), (5.11) and (5.12) extend to the case where some or
all of the xi coincide, provided that f(x) is sufficiently differentiable.
4. Interpolation Math 1070

> 4. Interpolation andApproximation > 4.1.5 Properties of divided differences
For example, define
f [x0, x0] = limx1→x0
f [x0, x1] = limx1→x0
f(x0)− f(x1)x1 − x0
f [x0, x0] = f ′(x0)
For an arbitrary n ≥ 1, let all xi → x0; this leads to the definition
f [x0, . . . , x0] =1n!f (n)(x0) (5.16)
For the cases where only some of nodes coincide: using (5.15), (5.16)we can extend the definition of the divided difference.For example
f [x0, x1, x0] = f [x0, x0, x1] =f [x0, x1]− f [x0, x0]
x1 − x0=f [x0, x1]− f ′(x0)
x1 − x0
4. Interpolation Math 1070

> 4. Interpolation andApproximation > 4.1.5 Properties of divided differences
MATLAB program: evaluating divided differences
Given a set of values f(x0), . . . , f(xn) we need to calculate the set ofdivided differences
f [x0, x1], f [x0, x1, x2], . . . , f [x0, x1, . . . , xn]
We can use the MATLAB function divdif using the function calldivdif y = divdif(x nodes, y values)Note that MATLAB does not allow zero subscripts, hence x nodes andy values have to be redefined as vectors containing n+ 1 components:
x nodes = [x0, x1, . . . , xn]x nodes(i) = xi−1, i = 1, . . . , n+ 1y values = [f(x0), f(x1), . . . , f(xn)]y values(i) = f(xi−1), i = 1, . . . , n+ 1
4. Interpolation Math 1070

> 4. Interpolation andApproximation > 4.1.5 Properties of divided differences
MATLAB program: evaluating divided differences
function divdif y = divdif(x nodes,y values) %% This is a function% divdif y = divdif(x nodes,y values)% It calculates the divided differences of the function% values given in the vector y values, which are the values of% some function f(x) at the nodes given in x nodes. On exit,% divdif y(i) = f[x 1,...,x i], i=1,...,m% with m the length of x nodes. The input values x nodes and% y values are not changed by this program.%divdif y = y values;m = length(x nodes);for i=2:mfor j=m:-1:idivdif y(j) = (divdif y(j)-divdif y(j-1)) ...
/(x nodes(j)-x nodes(j-i+1));end
end
4. Interpolation Math 1070

> 4. Interpolation andApproximation > 4.1.5 Properties of divided differences
This program is illustrated in this table.
i xi cos(xi) Di
0 0.0 1.000000 0.1000000E+1
1 0.1 0.980067 -0.9966711E-1
2 0.4 0.921061 -0.4884020E+0
3 0.6 0.825336 0.4900763E-1
4 0.8 0.696707 0.3812246E-1
5 1.0 0.540302 -0.3962047E-2
6 1.2 0.36358 -0.1134890E-2
Table: Values and divided differences for cos(x)
4. Interpolation Math 1070

> 4. Interpolation andApproximation > 4.1.6 Newton’s Divided Differences
Newton interpolation formula
Interpolation of f at x0, x1, . . . , xnIdea: use Pn−1(x) in the definition of Pn(x):
Pn(x) = Pn−1(x) + C(x)
C(x) ∈ Pn correction termC(xi) = 0 i = 0, . . . , n− 1
}=⇒
=⇒ C(x) = a(x− x0)(x− x1) . . . (x− xn−1)Pn(x) = axn + . . .
4. Interpolation Math 1070
> 4. Interpolation andApproximation > 4.1.6 Newton’s Divided Differences
Definition: The divided difference of f(x) at points x0, . . . , xn
is denoted by f [x0, x1, . . . , xn] and is defined to be the coefficient ofxn in Pn(x; f).
C(x) = f [x0, x1, . . . , xn](x− x0) . . . (x− xn−1)pn(x; f) = pn−1(x; f)+f [x0, x1, . . . , xn](x−x0) . . . (x−xn−1) (5.17)
p1(x; f) = f(x0) + f [x0, x1](x− x0) (5.18)
p2(x; f)=f(x0)+f [x0, x1](x−x0)+f [x0, x1, x2](x−x0)(x−x1) (5.19)
...
pn(x; f) = f(x0) + f [x0, x1](x− x0) + . . . (5.20)
+f [x0, . . . , xn](x− x0) . . . (x− xn−1)=⇒ Newton interpolation formula
4. Interpolation Math 1070

> 4. Interpolation andApproximation > 4.1.6 Newton’s Divided Differences
For (5.18), consider p1(x0), p1(x1). Easily, p1(x0) = f(x0), and
p1(x1)=f(x0)+(x1−x0)[f(x1)−f(x0)x1 − x0
]=f(x0)+[f(x1)−f(x0)]=f(x1)
So: deg(p1) ≤ 1 and satisfies the interpolation conditions. Then theuniqueness of polynomial interpolation ⇒ (5.18) is the linearinterpolation polynomial to f(x) at x0, x1.
For (5.19), note that
p2(x) = p1(x) + (x− x0)(x− x1)f [x0, x1, x2]
It satisfies: deg(P2) ≤ 2 and
p2(xi) = p1(xi) + 0 = f(xi), i = 0, 1p2(x2) = f(x0) + (x2 − x0)f [x0.x1] + (x2 − x0)(x2 − x1)f [x0, x1, x2]
= f(x0) + (x2 − x0)f [x0.x1] + (x2 − x1){f [x1, x2]− f [x0, x1]}= f(x0) + (x1 − x0)f [x0.x1] + (x2 − x1)f [x1, x2]= f(x0) + {f(x1)− f(x0)}+ {f(x2)− f(x1)} = f(x2)
By the uniqueness of polynomial interpolation, this is the quadraticinterpolating polynomial to f(x) at {x0, x1, x2}.
4. Interpolation Math 1070

> 4. Interpolation andApproximation > 4.1.6 Newton’s Divided Differences
Example
Find p(x) ∈ P2 such that p(−1) = 0, p(0) = 1, p(1) = 4.
p(x) = p(x0) + p[x0, x1](x− x0) + p[x0, x1, x2](x− x0)(x− x1)
xi p(xi) p[xi, xi+1] p[xi, xi+1, xi+1]−1 0 1 10 1 31 4
p(x) = 0 + 1(x+ 1) + 1(x+ 1)(x− 0) = x2 + 2x+ 1
4. Interpolation Math 1070

> 4. Interpolation andApproximation > 4.1.6 Newton’s Divided Differences
Example
Let f(x) = cos(x). The previous table contains a set of nodes xi, the valuesf(xi) and the divided differences computed with divdif
Di = f [x0, . . . , xi] i ≥ 0
pn(0.1) pn(0.3) pn(0.5)1 0.9900333 0.9700999 0.95016642 0.9949173 0.9554478 0.87690613 0.9950643 0.9553008 0.87764134 0.9950071 0.9553351 0.87758415 0.9950030 0.9553369 0.87758236 0.9950041 0.9553365 0.8775825
True 0.9950042 0.9553365 0.8775826
Table: Interpolation to cos(x) using (5.20)
This table contains the values of pn(x) for various values of n, computed
with interp, and the true values of f(x).
4. Interpolation Math 1070

> 4. Interpolation andApproximation > 4.1.6 Newton’s Divided Differences
In general, the interpolation node points xi
need not to be evenly spaced,nor be arranged in any particular order
to use the divided difference interpolation formula (5.20)
To evaluate (5.20) efficiently we can use a nested multiplicationalgorithm
Pn(x) = D0 + (x− x0)D1 + (x− x0)(x− x1)D2
+ . . .+ (x− x0) · · · (x− xn−1)Dn
with D0 = f(x0), Di = f [x0, . . . , xi] for i ≥ 1Pn(x) = D0 + (x− x0)[D1 + (x− x1)[D2 + · · · (5.21)
+ (x− xn−2)[Dn−1 + (x− xn−1)Dn] · · · ]]For example
P3(x) = D0 + (x− x0)D1 + (x− x1)[D2 + (x− x2)D3]
(5.21) uses only n multiplications to evaluate Pn(x) and is more convenient
for a fixed degree n. To compute a sequence of interpolation polynomials of
increasing degree is more efficient to se the original form (5.20).
4. Interpolation Math 1070

> 4. Interpolation andApproximation > 4.1.6 Newton’s Divided Differences
MATLAB: evaluating Newton divided difference for polynomial interpolation
function p eval = interp(x nodes,divdif y,x eval) %% This is a function% p eval = interp(x nodes,divdif y,x eval)% It calculates the Newton divided difference form of% the interpolation polynomial of degree m-1, where the% nodes are given in x nodes, m is the length of x nodes,% and the divided differences are given in divdif y. The% points at which the interpolation is to be carried out% are given in x eval; and on exit, p eval contains the% corresponding values of the interpolation polynomial.%m = length(x nodes);p eval = divdif y(m)*ones(size(x eval));for i=m-1:-1:1p eval = divdif y(i) + (x eval - x nodes(i)).*p eval;
end
4. Interpolation Math 1070

> 4. Interpolation andApproximation > 4.2 Error in polynomial interpolation
Formula for error E(t) = f(t)− pn(t; f)
Pn(x) =n∑j=0
f(xj)Lj(x)
Theorem
Let n ≥ 0, f ∈ Cn+1[a, b], x0, x1, . . . , xn distinct points in [a, b]. Then
f(x)− Pn(x) = (x− x0) . . . (x− xn)f [x0, x1, . . . , xn, x] (5.22)
=(x− x0)(x− x1) · · · (x− xn)
(n+ 1)!f (n+1)(cx) (5.23)
for x ∈ [a, b], cx unknown between the minimum and maximum ofx0, x1, . . . , xn.
4. Interpolation Math 1070

> 4. Interpolation andApproximation > 4.2 Error in polynomial interpolation
Proof of Theorem
Fix t ∈ R. Consider
pn+1(x; f)− interpolates f at x0, . . . , xn, t
pn(x; f)− interpolates f at x0, . . . , xn
From Newton
pn+1(x; f) = pn(x; f) + f [x0, . . . , xn, t](x− x0) . . . (x− xn)
Let x = t.
f(t) := pn+1(t, f) = pn(t; f) + f [x0, . . . , xn, t](t− x0) . . . (t− x)E(t) := f [x0, x1, . . . , xn, t](t− x0) . . . (t− xn) �
4. Interpolation Math 1070

> 4. Interpolation andApproximation > 4.2 Error in polynomial interpolation
Examples
f(x) = xn, f [x0, . . . , xn] = n!n! = 1 or
pn(x; f) = 1 · xn ⇒ f [x0, . . . , xn] = 1f(x) ∈ Pn−1, f [x0, x1, . . . , xn] = 0f(x) = xn+1, f [x0, . . . , xn] = x0 + x1 + . . .+ xn
R(x) = xn+1 − pn(x; f) ∈ Pn+1
R(xi) = 0, i = 0, . . . , n
R(xi) = (x− x0) . . . (x− xn) = xn+1 − (x0 + . . .+ xn)xn + . . .︸ ︷︷ ︸Pn
=⇒ f [x0, . . . , xn] = x0 + x1 + . . .+ xn.
If f ∈ Pm,
f [x0, . . . , xm, x] ={
polynomial degree m− n− 1 if n ≤ m− 10 if n > m− 1
4. Interpolation Math 1070
> 4. Interpolation andApproximation > 4.2 Error in polynomial interpolation
Example
Take f(x) = ex, x ∈ [0, 1] and consider the error in linear interpolationto f(x) using x0, x1 satisfying 0 ≤ x0 ≤ x1 ≤ 1.
From (5.23)
ex − P1(x) =(x− x0)(x− x1)
2ecx
for some cx between the max and min of x0, x1 and x. Assumingx0 < x < x1, the error is negative and approximately a quadraticpolynomial
ex − P1(x) = −(x1 − x)(x− x0)2
ecx
Since x0 ≤ cx ≤ x1
(x1 − x)(x− x0)2
ex0 ≤ |ex − P1(x)| =(x1 − x)(x− x0)
2ex1
4. Interpolation Math 1070

> 4. Interpolation andApproximation > 4.2 Error in polynomial interpolation
For a bound independent of x
maxx0≤x≤x1
(x1 − x)(x− x0)2
=h2
8, h = x1 − x0
and ex1 ≤ e on [0, 1]
|ex − P1(x)| ≤h2
8e, 0 ≤ x0 ≤ x ≤ x1 ≤ 1
independent of x, x0, x1.Recall that we estimated e0.826 ·= 2.2841914 by e0.82 and e0.83, i.e.,h = 0.01.
|ex − P1(x)| ≤h2
8e = |ex − P1(x)| ≤
0.012
82.72 = 0.0000340,
The actual error being −0.0000276, it satisfies this bound.
4. Interpolation Math 1070
> 4. Interpolation andApproximation > 4.2 Error in polynomial interpolation
4. Interpolation Math 1070

> 4. Interpolation andApproximation > 4.2 Error in polynomial interpolation
Example
Again let f(x) = ex on [0, 1], but consider the quadratic interpolation.
ex − P2(x) =(x− x0)(x− x1)(x− x2)
6ecx
for some cx between the min and max of x0, x1, x2 and x.Assuming evenly spaced points, h = x1 − x0 = x2 − x1, and0 ≤ x0 < x < x2 ≤ 1, we have as before
|ex − P2(x)| ≤∣∣∣∣ (x− x0)(x− x1)(x− x2)
6
∣∣∣∣ e1while
maxx0≤x≤x2
(x− x0)(x− x1)(x− x2)6
=h3
9√
3(5.24)
hence
|ex − P2(x)| ≤h3e
9√
3≈ 0.174h3
4. Interpolation Math 1070

> 4. Interpolation andApproximation > 4.2 Error in polynomial interpolation
For h = 0.01, 0 ≤ x ≤ 1
|ex − P2(x)| ≤ 1.74× 10−7
4. Interpolation Math 1070

> 4. Interpolation andApproximation > 4.2 Error in polynomial interpolation
Let w2(x) =(x+ h)x(x− h)
6=x3 − xh
6
a translation along x-axis of polynomial in (5.24). Then x = ± h√3
satisfies
0 = w′2(x) =3x2 − h2
6and gives
∣∣∣∣w2
(± h√
3
)∣∣∣∣ = h3
9√
3
Figure: y = w2(x)4. Interpolation Math 1070
> 4. Interpolation andApproximation > 4.2.2 Behaviour of the error
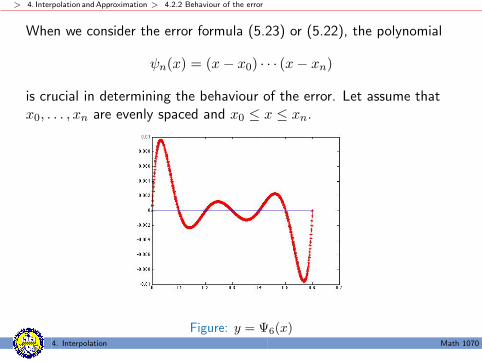
When we consider the error formula (5.23) or (5.22), the polynomial
ψn(x) = (x− x0) · · · (x− xn)
is crucial in determining the behaviour of the error. Let assume thatx0, . . . , xn are evenly spaced and x0 ≤ x ≤ xn.
Figure: y = Ψ6(x)4. Interpolation Math 1070

> 4. Interpolation andApproximation > 4.2.2 Behaviour of the error
Remark that the interpolation error
is relatively larger in [x0, x1] and [x5, x6], and
is likely to be smaller near the middle of the node points
⇒ In practical interpolation problems, high-degree polynomial interpolationwith evenly spaced nodes is seldom used.But when the set of nodes is suitable chosed, high-degree polynomials can bevery useful in obtaining polynomial approximations to functions.
Example
Let f(x) = cos(x), h = 0.2, n = 8 and then interpolate at x = 0.9.
Case (i) x0 = 0.8, x8 = 2.4⇒ x = 0.9 ∈ [x0, x1]. By direct calculation ofP8(0.9),
cos(0.9)− P8(0.9) ·= −5.51× 10−9
Case (ii) x0 = 0.2, x8 = 1.8⇒ x = 0.9 ∈ [x3, x4], where x4 is the midpoint.
cos(0.9)− P8(0.9) ·= 2.26× 10−10,
a factor of 24 smaller than the first case.
4. Interpolation Math 1070

> 4. Interpolation andApproximation > 4.2.2 Behaviour of the error
Example
Le f(x) = 11+x2 , x ∈ [−5, 5], n > 0 an even integer, h = 10
n
xj = −5 + jh, j = 0, 1, 2, . . . , n
It can be shown that for many points x in [−5, 5], the sequence of {Pn(x)}does not converge to f(x) as n→∞.
Figure: The interpolation to 11+x2
4. Interpolation Math 1070

> 4. Interpolation andApproximation > 4.3 Interpolation using spline functions
x 0 1 2 2.5 3 3.5 4
y 2.5 0.5 0.5 1.5 1.5 1.125 0The simplest method of interpolating data in a table: connecting the nodepoints by straight lines: the curve y = `(x) is not very smooth.
Figure: y = `(x): piecewise linear interpolation
We want to construct a smooth curve that interpolates the given data point
that follows the shape of y = `(x).4. Interpolation Math 1070

> 4. Interpolation andApproximation > 4.3 Interpolation using spline functions
Next choice: use polynomial interpolation. With seven data point, weconsider the interpolating polynomial P6(x) of degree 6.
Figure: y = P6(x): polynomial interpolation
Smooth, but quite different from y = `(x)!!!
4. Interpolation Math 1070
> 4. Interpolation andApproximation > 4.3 Interpolation using spline functions
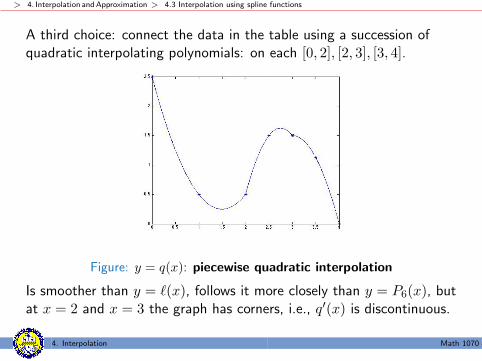
A third choice: connect the data in the table using a succession ofquadratic interpolating polynomials: on each [0, 2], [2, 3], [3, 4].
Figure: y = q(x): piecewise quadratic interpolation
Is smoother than y = `(x), follows it more closely than y = P6(x), butat x = 2 and x = 3 the graph has corners, i.e., q′(x) is discontinuous.
4. Interpolation Math 1070

> 4. Interpolation andApproximation > 4.3.1 Spline interpolation
Cubic spline interpolation
Suppose n data points (xi, yi), i = 1, . . . , n are given and
a = x1 < . . . < xn = b
We seek a function S(x) defined on [a, b] that interpolates the data
S(xi) = yi, i = 1, . . . , n
Find S(x) ∈ C2[a, b], a natural cubic spline such that
S(x)is a polynomial of degree ≤ 3on each subinterval [xj−1, xj ], j = 2, 3, . . . ,n;S(xi) = yi, i = 1, . . . , n,S′′(a) = S′′(b).
On [xi−1, xi]: 4 degrees of freedom (cubic spline) ⇒ 4(n− 1) DOF.
4. Interpolation Math 1070

> 4. Interpolation andApproximation > 4.3.1 Spline interpolation
S(xi) = yi : n constraints
S′(xi − 0) = S′(xi + 0) continuity 2 = 1, . . . , n− 1S′′(xi − 0) = S′′(xi + 0) i = 2, . . . , n− 1S(xi − 0) = S(xi + 0) i = 2, . . . , n− 1
3n− 6
n+ (3n− 6) = 4n− 6 constraints
Two more constraints needed to be added, Boundary Conditions:
S′′ = 0 at a = x1, xn = b,
for a natural cubic spline.(Linear system, with symmetric, positive definite, diagonally dominantmatrix.)
4. Interpolation Math 1070
> 4. Interpolation andApproximation > 4.3.2 Construction of the cubic spline
Introduce the variables M1, . . . ,Mn with
Mi ≡ S′′(xi), i = 1, 2, . . . , n
Since S(x) is cubic on each [xj−1, xj ]⇒ S′′(x) is linear, hence determinedby its values at two points:
S′′(xj−1) = Mj−1, S′′(xj) = Mj
⇒S′′(x) =(xj − x)Mj−1 + (x− xj−1)Mj
xj − xj−1, xj−1 ≤ x ≤ xj (5.25)
Form the second antiderivative of S′′(x) on [xj−1, xj ] and apply theinterpolating conditions
S(xj−1) = yj−1, S(xj) = yj
we get
S(x) =(xj − x)3Mj−1 + (x− xj−1)3Mj
6(xj − xj−1)+
(xj − x)yj−1 + (x− xj−1)yj
6(xj − xj−1)
− 16(xj − xj−1) [(xj − x)Mj−1 + (x− xj−1)Mj ] (5.26)
for x ∈ [xj−1, xj ], j = 1, . . . , n.
4. Interpolation Math 1070

> 4. Interpolation andApproximation > 4.3.2 Construction of the cubic spline
Formula (5.26) implies that S(x) is continuous over all [a, b] andsatisfies the interpolating conditions S(xi) = yi.Similarly, formula (5.25) for S′′(x) implies that is continuous on [a, b].To ensure the continuity of S′(x) over [a, b]: we require S′′(x) on[xj−1, xj ] and [xj , xj+1] have to give the same value at their commonpointxj , j = 2, 3, . . . , n− 1, leading to the tridiagonal linear system
xj − xj−1
6Mj−1 +
xj+1 − xj−1
3Mj +
xj+1 − xj6
Mj+1 (5.27)
=yj+1 − yjxj+1 − xj
− yj − yj−1
xj − xj−1, j = 2, 3, . . . , n− 1
These n− 2 equations together with the assumptionS′′(a) = S′′(b) = 0:
M1 = Mn = 0 (5.28)
leads to the values M1, . . . ,Mn, hence the function S(x).
4. Interpolation Math 1070

> 4. Interpolation andApproximation > 4.3.2 Construction of the cubic spline
Example
Calculate the natural cubic spline interpolating the data{(1, 1), (2,
12), (3,
13), (4,
14)}
n = 4, and all xj−1 − xj = 1. The system (5.27) becomes
16M1+ 2
3M2 + 16M3 = 1
316M2 + 2
3M3 + 16M4 = 1
12
and with (5.28) this yields
M2 =12, M3 = 0
which by (5.26) gives
S(x) =
112x
3 − 14x
2 − 13x+ 3
2 , 1 ≤ x ≤ 2− 1
12x3 + 3
4x2 − 7
3x+ 176 , 2 ≤ x ≤ 3
− 112x+ 7
12 , 3 ≤ x ≤ 4
Are S′(x) and S′′(x) continuous?
4. Interpolation Math 1070

> 4. Interpolation andApproximation > 4.3.2 Construction of the cubic spline
Example
Calculate the natural cubic spline interpolating the datax 0 1 2 2.5 3 3.5 4
y 2.5 0.5 0.5 1.5 1.5 1.125 0
n = 7, system (5.27) has 5 equations
Figure: Natural cubic spline interpolation y = S(x)Compared to the graph of linear and quadratic interpolation y = `(x) and
y = q(x), the cubic spline S(x) no longer contains corners.
4. Interpolation Math 1070

> 4. Interpolation andApproximation > 4.3.3 Other interpolation spline functions
So far we only interpolated data points, wanting a smooth curve.
When we seek a spline to interpolate a known function, we are interested also
in the accuracy.
Let f(x) be given on [a, b], that we want to interpolate on evenlyspaced values of x. For n > 1, let
h =b− an− 1
, xj = a+ (j − 1)h, j = 1, 2, . . . , n
and Sn(x) be the natural cubic spline interpolating f(x) at x1, . . . , xn.It can be shown that
maxa≤x≤b
|f(x)− Sn(x)| ≤ ch2 (5.29)
where c depends on f ′′(a), f ′′(b) and maxa≤x≤b |f (4)(x)|. The reasonwhy Sn(x) doesn’t converge more rapidly (have an error bound with ahigher power of h) is that f ′′(a) 6= 0 6= f ′′(b), while by definitionS′′n(a) = S′′n(b) = 0. For functions f(x) with f ′′(a) = f ′′(b) = 0, theRHS of (5.29) can be replaced with ch4.
4. Interpolation Math 1070

> 4. Interpolation andApproximation > 4.3.3 Other interpolation spline functions
To improve on Sn(x), we look for other interpolating functions S(x) thatinterpolate f(x) on
a = x1 < x2 < . . . < xn = b
Recall the definition of natural cubic spline:
1 S(x) cubic on each subinterval [xj−1, xj ];2 S(x), S′(x) and S′′(x) are continuous on [a, b];3 S′′(x1) = S′′(xn) = 0.
We say that S(x) is a cubic spline on [a, b] if
1 S(x) cubic on each subinterval [xj−1, xj ];2 S(x), S′(x) and S′′(x) are continuous on [a, b];
With the interpolating conditions
S(xi) = yi, i = 1, . . . , n
the representation formula (5.26) and the tridiagonal system (5.27) arestill valid.
4. Interpolation Math 1070

> 4. Interpolation andApproximation > 4.3.3 Other interpolation spline functions
This system has n− 2 equations and n unknowns: M1, . . . ,Mn. Byreplacing the end conditions (5.28) S′′(x1) = S′′(xn) = 0, we canobtain other interpolating cubic splines.
If the data (xi, yi) is obtained by evaluating a function f(x)
yi = f(xi), i = 1, . . . , n
then we choose endpoints (boundary conditions) for S(x) that wouldyield a better approximation to f(x). We require
S′(x1) = f ′(x1), S′(xn) = f ′(xn)
or
S′′(x1) = f ′′(x1), S′′(xn) = f ′′(xn)
When combined with(5.26-5.27), either of these conditions leads to aunique interpolating spline S(x), dependent on which of theseconditions is used. In both cases, the RHS of (5.29) can be replacedby ch4, where c depends on maxx∈[a,b]
∣∣f (4)(x)∣∣.
4. Interpolation Math 1070

> 4. Interpolation andApproximation > 4.3.3 Other interpolation spline functions
If the derivatives of f(x) are not known, then extra interpolatingconditions can be used to ensure that the error bond of (5.29) isproportional to h4. In particular, suppose that
x1 < z1 < x2, xn−1 < z2 < xn
and f(z1), f(z2) are known. Then use the formula for S(x) in (5.26)and
s(z1) = f(z1), s(z2) = f(z2) (5.30)
This adds two new equations to the system (5.27), one for M1 andM2, and another equation for Mn−1,Mn. This form is preferable tothe interpolating natural cubic spline, and is almost equally easy toproduce. This is the default form of spline interpolation that isimplemented in MATLAB. The form of spline formed in this way issaid to satisfy the not-a-knot interpolation boundary conditions.
4. Interpolation Math 1070

> 4. Interpolation andApproximation > 4.3.3 Other interpolation spline functions
Interpolating cubic spline functions are a popular way to represent dataanalytically because
1 are relatively smooth: C2,
2 do not have the rapid oscillation that sometime occurs with thehigh-degree polynomial interpolation,
3 are relatively easy to work with on a computer.
They do not replace polynomials, but are a very useful extension ofthem.
4. Interpolation Math 1070

> 4. Interpolation andApproximation > 4.3.4 The MATLAB program spline
The standard package MATLAB contains the functionrm spline.The standard calling sequence is
y = spline(x nodes, y nodes, x)
which produces the cubic spline function S(x) whose graph passesthrough the points {(ξi, ηi) : i = 1, . . . , n} with
(ξi, ηi) = (x nodes(i), y nodes (i))
and n the length of x nodes (and y nodes). The not-a-knotinterpolation conditions of (5.30) are used. The point (ξ2, η2) is thepoint (z1, f(z1)) of (5.30) and (ξn−1, ηn−1) is the point (z2, f(z2)).
4. Interpolation Math 1070
> 4. Interpolation andApproximation > 4.3.4 The MATLAB program spline
Example
Approximate the function f(x) = ex on the interval [a, b] = [0, 1]. Forn > 0, define h = 1/n and interpolating nodes
x1 = 0, x2 = h, x3 = 2h, . . . , xn+1 = nh = 1
Using spline, we produce the cubic interpolating spline interpolantSn,1 to f(x). With the not-a-knot interpolation conditions, the nodesx2 and xn are the points z1 and z2 in (5.30). For a general smoothfunction f(x), it turns out that te magnitude of the errorf(x)− Sn,1(x) is largest around the endpoints of the interval ofapproximation.
4. Interpolation Math 1070
> 4. Interpolation andApproximation > 4.3.4 The MATLAB program spline
Example
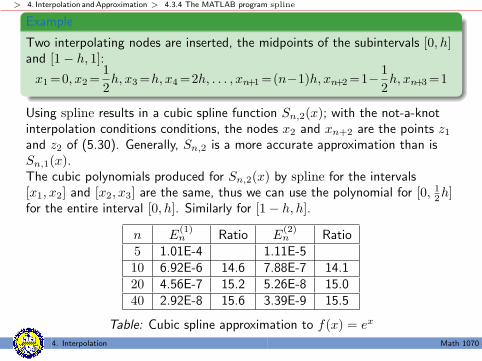
Two interpolating nodes are inserted, the midpoints of the subintervals [0, h]and [1− h, 1]:
x1 =0, x2 =12h, x3 =h, x4 =2h, . . . , xn+1 =(n−1)h, xn+2 =1− 1
2h, xn+3 =1
Using spline results in a cubic spline function Sn,2(x); with the not-a-knotinterpolation conditions conditions, the nodes x2 and xn+2 are the points z1and z2 of (5.30). Generally, Sn,2 is a more accurate approximation than isSn,1(x).The cubic polynomials produced for Sn,2(x) by spline for the intervals[x1, x2] and [x2, x3] are the same, thus we can use the polynomial for [0, 1
2h]for the entire interval [0, h]. Similarly for [1− h, h].
n E(1)n Ratio E
(2)n Ratio
5 1.01E-4 1.11E-510 6.92E-6 14.6 7.88E-7 14.120 4.56E-7 15.2 5.26E-8 15.040 2.92E-8 15.6 3.39E-9 15.5
Table: Cubic spline approximation to f(x) = ex
4. Interpolation Math 1070