monitoring numerical stability of coupled mc codes...
TRANSCRIPT

1
Monitoring Numerical Stability of
Coupled MC codes
Serpent User's group meeting, Berkeley, CA,
November 6-8, 2013
D. Kotlyar, E. Shwageraus
Department of Nuclear Engineering,
Ben Gurion University of the Negev

2
Outline
Background
Demonstration how instabilities can occur (PWR/BWR)
Description of coupling schemes
Definition of a couple scheme
Explicit vs. Implicit
BWR test case
BOT and SIMP results
Computational requirements of the implicit method
Quantitative stability assessment
Performance of hybrid coupling scheme
Stability monitoring
Computational requirements
Summary and conclusions

3
MC-Burnup-Thermal hydraulic coupling
The objective of the coupled MC analysis is to obtain:
Nuclide density field as a function of t
TH properties as a function of t
This non-linear problem is solved by operator splitting
Described by 3 coupled equations:
Burnup: describes the changes in ND
Heat balance equation: computes temperature distribution
Eigenvalue neutron transport equation: provides the neutron flux
How to couple the independent solutions ?

4
Explicit vs. Implicit methods
The explicit BOT method
Neutronic-TH convergence at BOS
Depletion with BOS (explicit) flux values
May be unstable due to the numerical explicit coupling scheme
Stochastic Implicit Mid-Point (SIMP) method
Simultaneous convergence of ND and TH fields
Uses EOS fluxes and thus implicit
Flux/power/temperatures are time-step averaged quantities
Proven to be numerically stable

5
Example of an oscillatory behavior: PWR
Spatial oscillatory behavior
BOT vs. SIMP methods
0
200
400
600
800
1000
1200
1400
1600
1800
0 50 100 150 200 250 300 350 400
Height, cm
Ce
nte
r li
ne t
em
pe
ratu
re d
istr
ibu
tio
n
200
250
300
0.0E+00
2.0E-09
4.0E-09
6.0E-09
8.0E-09
1.0E-08
1.2E-08
0 50 100 150 200 250 300 350 400
Time, days
Co
ncen
trati
on
of
Xe135 in
no
de 4
dt =10d
dt = 25d
dt = 50d
0.00E+00
2.00E-09
4.00E-09
6.00E-09
8.00E-09
1.00E-08
1.20E-08
0 50 100 150 200 250 300 350 400
Time, days
Co
nc
en
tra
tio
n o
f X
e1
35
in
no
de 4
dt = 10 days
dt = 25 days
dt = 50 days
dt = 100 days
0
200
400
600
800
1000
1200
1400
1600
1800
0 50 100 150 200 250 300 350 400
Height, cm
Cen
ter
lin
e t
em
pera
ture
dis
trib
uti
on
t = 210 days
t = 220 days
t = 230 days

6
Test Case Description
77 BWR assembly, UO2 fuel
36 axial burnup regions
Previous work examined PWR assembly
The oscillations developed immediately (BOL)
Axial void dist. determines the flux dist. @ BOL
Initially, local burnup effects do not affect the flux shape
Numerical oscillations can still develop at higher burnup
Void dist. effect is compensated by the burnup dist. effect

7
BOT vs. SIMP results
BOT coupling scheme becomes unstable after ~ 15 MWd/kg
Oscillations in spatial dist. of neutronic and TH parameters
Can be visually observed
K-eff and nuclide density dist.
- all oscillate
SIMP is numerically stable
0.85
0.90
0.95
1.00
1.05
1.10
1.15
1.20
1.25
0 5 10 15 20 25 30 35 40 45 50
ke
ff
Burnup, MWd/kg
BOT
SIMP
0.0E+00
2.0E-09
4.0E-09
6.0E-09
8.0E-09
1.0E-08
1.2E-08
0 5 10 15 20 25 30 35 40 45 50
Co
ncen
tra
tio
n o
f X
e13
5
Burnup, MWd/kg
BOT
SIMP
0.0E+00
1.0E-04
2.0E-04
3.0E-04
4.0E-04
5.0E-04
6.0E-04
7.0E-04
8.0E-04
9.0E-04
0 5 10 15 20 25 30 35 40 45 50
Co
ncen
tra
tio
n o
f U
23
5
Burnup, MWd/kg
BOT
SIMP

8
Open issues
Numerical instability of BOT method is a real issue
Was only qualitatively assessed by visual inspection of the results
In some cases (few initial time steps) – no oscillations observed
The oscillations disappear if SIMP method is used throughout
SIMP is unconditionally stable
But, requires more iterations higher computational cost
For cases when only depletion is considered
Explicit Euler method → 1 MC transport solutions
Implicit methods → ≥ 3 MC transport solutions
Can the two methods be combined?
Use fast BOT but continuously monitor numerical stability
Switch to more computationally intensive SIMP if instability is observed

9
Open issues: computational costs
SIMP requires more iterations than BOT
Simultaneous convergence on TH & ND
BOT converges only on TH field
Oscillation problem is case specific
Oscillation may not appear at all or may develop later
Therefore, employing implicit methods may be unefficient

10
Alternative solution approach
Diagnostic mechanism is required:
To identify the onset of numerical instabilities,
To alert the user, or
Automatically switch to SIMP algorithm
BOT (fast and simple) → SIMP unconditionally stable but
computationally more expensive
Such hybrid algorithm was developed and implemented in BGCore
Assures numerical stability
Improves computational efficiency of coupled MC codes
Does not require any intervention from the user

11
The irradiation time is subdivided into time steps
At each time-step
Iteratively solve MC, depletion and TH problems
The procedure is repeated for the following steps
The global solution at any base point n is achieved by:
Sequentially solving the prior sub-steps (≤ n)
Analyzing the behavior of time integration method
Define amplification (growth) factor: G
The solution is stable if G is bounded
Keep monitoring G for the following steps
Depletion calculations
⋯
n
Time
0 1 2
⋯
i

12
Stability of numerical schemes
A stable scheme produces a bounded solution if the exact
solution is bounded
Error between computed solution and the exact solution
should not be amplified as we progress in time
Notation:
𝑈 𝑁 Exact solution
𝑈𝑁 Computed solution
𝜀𝑁 error = 𝑈 𝑁- 𝑈𝑁
The stability requires that:
𝐺 =𝑁+1
𝑁 ≤ 1
The growth factor must satisfy this condition for all time-steps

13
Computing the stability criterion (1)
For a given base point n
𝐔 𝐧(RR dist.) is approximated by the finest available time-steps set
𝐔𝐧←𝐢 RR at point n are obtained by re-depleting:
Starting from point i, with 𝑵𝒊 and 𝝓𝒊and ∆t = tn - ti
Calculate the error in RR
δn = U n − Un←n−1
δi = U n − Un←𝑖
n
Time
0 1 i-1
⋯ i
⋯ n-1

14
Computing the stability criterion (2)
Calculate Gi
𝐺𝑖 = 𝛿𝑛
𝛿𝑖
Repeat the procedure of calculating Gi for all i ∈ 0, 𝑛 − 2
The quantity of interest is: 𝐺 = 𝑚𝑎𝑥 𝐺𝑖
The error should not be amplified regardless of the step-size (i)
i.e. all the solutions for different ∆t must be bounded
The scheme is stable if 𝐺 ≤ 1 and unstable otherwise
The procedure is repeated for each time point n
n
Time
0 1 i-1 i n-1

15
Results: amplification factor G
Quantitative assessment of the stability
SIMP is stable (G<1)
BOT is stable only up until ~15 MWd/kg
0
4
8
12
16
20
0 9 18 27 36 45
Am
plifi
ca
tio
n f
ac
tor
G
Burnup, MWd/kg
BOT
SIMP
unstable region
stable region
16
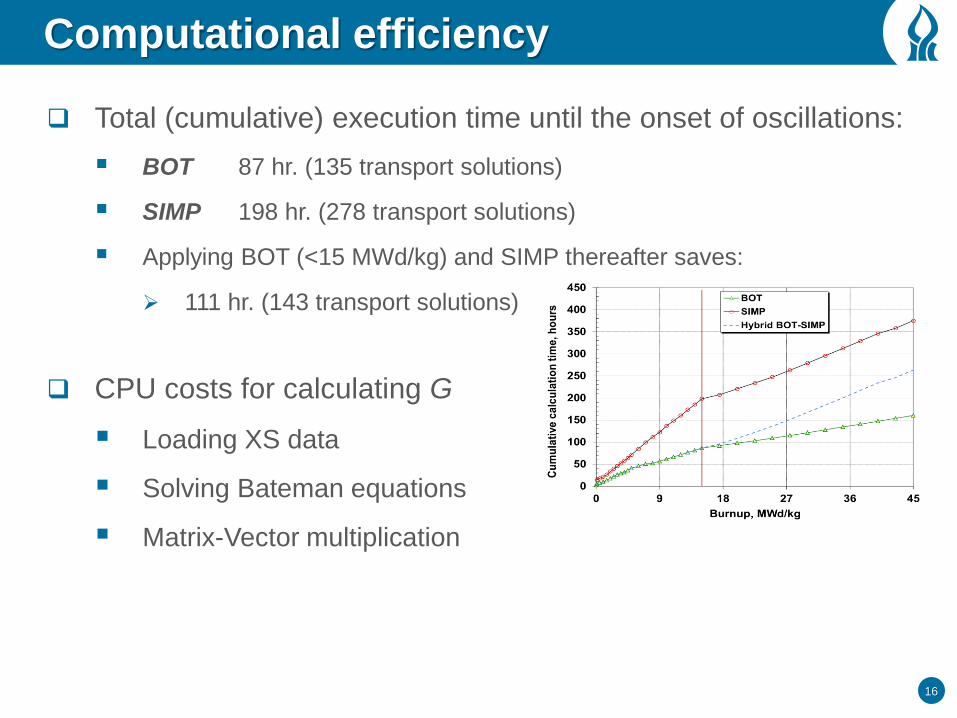
Computational efficiency
Total (cumulative) execution time until the onset of oscillations:
BOT 87 hr. (135 transport solutions)
SIMP 198 hr. (278 transport solutions)
Applying BOT (<15 MWd/kg) and SIMP thereafter saves:
111 hr. (143 transport solutions)
CPU costs for calculating G
Loading XS data
Solving Bateman equations
Matrix-Vector multiplication

17
Conclusions (1)
Existing MC coupling methods may be unstable
Stochastic implicit mid-point (SIMP) methods was developed
Unconditionally stable
But, more computationally intensive
Some problems do not have stability issues
Always using SIMP would be a waste of computing resources

18
Conclusions (2)
A method for monitoring numerical stability was developed
Evaluates error amplification factor which must be bounded
Capable of identifying the onset of instability
Can automatically trigger the transition:
From: Explicit BOT
To: Implicit SIMP method
The hybrid method is more computationally efficient
Computational requirements for monitoring stability are negligible

19
Thank you for your attention

20
Absorption reaction rate distribution
Comparison of BOT and SIMP methods
Absorption reaction rate
BOT method
SIMP method
0.0E+00
5.0E+13
1.0E+14
1.5E+14
2.0E+14
2.5E+14
0 100 200 300 400A
bs
orp
tio
n r
ea
cti
on
ra
tes
, 1
/se
cAxial height, cm
i<-- i
i<-- i-1
i<-- i-2
i<-- i-3
i<-- i-4
0.0E+00
5.0E+13
1.0E+14
1.5E+14
2.0E+14
2.5E+14
0 100 200 300 400
Ab
so
rpti
on
re
ac
tio
n r
ate
s, 1/s
ec
Axial height, cm
i<-- i
i<-- i-1
i<-- i-2
i<-- i-3
i<-- i-4