moderní vymoženosti vědy – 2017 • díl 8 · 0rghuqty\pråhqrvwly g\ ± 'to 8 2...
TRANSCRIPT

MATERIÁLY
XIII MEZINÁRODNÍ VĚDECKO - PRAKTICKÁ
KONFERENCE
«MODERNÍ VYMOŽENOSTI VĚDY-
2017»
27 ledna - 05 února 2017 roku
Díl 8
Technické vědy
Fyzika
Matematika
Stavebnictví a architektura
Moderních informačních technologií
Praha
Publishing House «Education and Science» s.r.o
2017

Moderní vymoženosti vědy – 2017 • Díl 8
2
Vydáno Publishing House «Education and Science»,
Frýdlanská 15/1314, Praha 8
Spolu s DSP SHID, Berdianskaja 61 Б, Dnepropetrovsk
Materiály XIII mezinárodní vědecko - praktická konference
« Moderní vymoženosti vědy– 2017».
- Díl 8. Technické vědy. Fyzika. Matematika. Stavebnictví a architektura. Moderních informačních technologií: Praha.
Publishing House «Education and Science» s.r.o - 86 stran
Šéfredaktor: Prof. JUDr Zdenĕk Černák
Náměstek hlavního redaktor: Mgr. Alena Pelicánová
Zodpovědný za vydání: Mgr. Jana Štefko
Manažer: Mgr. Helena Žákovská
Technický pracovník: Bc. Kateřina Zahradníčková
XIII sběrné nádobě obsahují materiály mezinárodní vědecko - praktická
konference «Moderní vymoženosti vědy»
(27 ledna - 05 února 2017 roku) po sekcích Technické vědy. Fyzika. Matematika . Stavebnictví a architektura. Moderních informačních technologií
Pro studentů, aspirantů a vědeckých pracovníků
Cena 270 Kč
ISBN 978-966-8736-05-6
© Kolektiv autorů, 2017
© Publishing house «Education and Science» s.r.o.
Moderní vymoženosti vědy – 2017 • Díl 8
87

Moderní vymoženosti vědy – 2017 • Díl 8
86
STAVEBNICTVÍ A ARCHITEKTURA
Urban design a krajinářské architektury
Чан Куок Вьет БОЛЬШЕПРОЛЕТНЫЕ СВЕТОПРОЗРАЧНЫЕ
КОНСТРУКЦИИ В АРХИТЕКТУРНОМ ОБЛИКЕ ГОРОДА РОСТОВА- НА-
ДОНУ XXI ВЕКА ................................................................................................. 69
Moderní stavební materiály
Мирюк О.А. ВЛИЯНИЕ ГОРЮЧИХ СЛАНЦЕВ НА ФОРМИРОВАНИЕ
СТРУКТУРЫ ПЕНОСТЕКОЛЬНОГО МАТЕРИАЛА ....................................... 71
MODERNÍCH INFORMAČNÍCH TECHNOLOGIÍ
Computer engineering
Мясищев А.А. НАСТРОЙКА PID РЕГУЛЯТОРОВ ДЛЯ ПОЛЕТНОГО
КОТРОЛЛЕРА НА БАЗЕ ARDUINO MEGA256 И ПРОШИВКИ
MEGAPIRATENG ............................................................................................... 76
OBSAH ....................................................................................................................... 84
Moderní vymoženosti vědy – 2017 • Díl 8
3
TECHNICKÉ VĚDY
Větev inženýrství Женсикбай Ж.Ж.,Болатхан Н., Толеуов К.К., Калиев Б.З. Задачи технической диагностики силовых агрегатов
Женсикбай Ж., магистрант
Болатхан Н., магистрант
Толеуов К.К. , доцент, к.т.н.
Калиев Б.З., доцент, к.тн.
Казахский национальный исследовательский технический университет
имени К.И. Сатпаева
ЗАДАЧИ ТЕХНИЧЕСКОЙ ДИАГНОСТИКИ СИЛОВЫХ АГРЕГАТОВ
В статье раскрываются основные моменты процесса диагностирования
силовых агрегатов применяемых в нефтегазовой отрасли. В качестве примера
для анализа расмотрены мероприятия производимые с газоперкачивающими
агрегатами (ГПА). Основными типами ГПА используемыми в производственных
условиях в настоящее время являются: агрегаты с приводом от газотурбинных
установок (ГТУ), электроприводные агрегаты и поршневые
газомотокомпрессоры. Грамотное проведение диагностических мероприятий с
такими машинами – основа долговечности работы силовых установок.
The article describes the main points of the process of diagnosing powertrains
used in the oil and gas industry. As an example, for the analysis examined events
produced with gazoperkachivayuschimi units (GPU). The main types of compressor
units used in industrial conditions are now: units driven by gas turbine units (GTU),
electrically driven machines and piston gas motor compressors. Proper conduct of
diagnostic procedures such machines - the basis of durability of power plants.
Трубопроводный транспорт Казахстана - важнейшая составная часть
производственной инфраструктуры, а его развитие и совершенствование - одна
из приоритетных задач государственной политики. Создание динамично
развивающейся, устойчиво функционирующей и сбалансированной
Moderní vymoženosti vědy – 2017 • Díl 8
4
национальной системы трубопроводного транспорта - необходимое условие
стабилизации и дальнейшего подъема экономики республики, повышения
уровня жизни населения.
Развитие газовой и ряда смежных отраслей промышленности сегодня в
значительной степени зависит от дальнейшего совершенствования эксплуатации
и обслуживания систем трубопроводного транспорта природных газов из
отдаленных и порой слабо освоенных регионов в центральные районы страны.
Оптимальный режим эксплуатации магистральных газопроводов
заключается прежде всего в максимальном использовании их пропускной
способности при минимальных энергозатратах на компримирование и
транспортировку газа по газопроводу. В значительной степени этот режим
определяется работой компрессорных станций (КС), устанавливаемых по трассе
газопровода, как правило, через каждые 100-150 км. Длина участков газопровода
между КС рассчитывается, с одной стороны, исходя из величины падения
давления газа на данном участке трассы, а с другой - исходя из привязки станции
к населенным пунктам, источникам водоснабжения, электроэнергии и т.п.
Оптимальный режим работы компрессорных станций в значительной
степени зависит от типа и числа газоперекачивающих агрегатов (ГПА),
установленных на станции, их энергетических показателей и технологических
режимов работы.
Основными типами ГПА на КС в настоящее время являются: агрегаты с
приводом от газотурбинных установок (ГТУ), электроприводные агрегаты и
поршневые газомотокомпрессоры. Особенности работы газотурбинного привода
в наилучшей степени, среди отмеченных типов ГПА, отвечают требованиям
эксплуатации газотранспортных систем: высокая единичная мощность (от 6 до
25 МВт), небольшая относительная масса, блочно-комплектная конструкция,
высокий уровень автоматизации и надежности, автономность привода и работа
его на перекачиваемом газе. Именно поэтому этот вид привода получил
наибольшее распространение на газопроводах (свыше 85% общей
установленной на КС мощности агрегатов).
Подачу газа по магистральным газопроводам, протяженность
которых в Казахстане с каждым годом возрастает, обеспечивают
большое количество компрессорных станций (КС) с установленными на них
Moderní vymoženosti vědy – 2017 • Díl 8
85
Inženýrů elektrotechniky a elektroniky
Микаева С.А., Микаева А.С. УЛЬТРАФИОЛЕТОВОЕ
ОБЕЗЗАРАЖИВАНИЕ . .................................................................................... 31
Automatizované systémy řízení ve zpracovatelském průmyslu
Борин В.С., Тихий А.Б. МАТЕМАТИЧНА МОДЕЛЬ ТЕХНОЛОГІЧНОГО
ПРОЦЕСУ РЕГЕНЕРАЦІЇ ЛИЕТИЛЕНГЛІКОЛЮ . ......................................... 34
Occupational health
Батесова Ф.К., Жумабаева А.К. ИССЛЕДОВАНИЕ ЭНЕРГИИ ВЗРЫВА
ДЛЯ ТУШЕНИЯ ПОЖАРОВ В НЕФТЕГАЗОВОЙ ОТРАСЛИ . ..................... 38
FYZIKA
Lyubimov V. V. TEST RESULTS OF DIFFERENT ELECTROMETRIC
VARIOMETER SENSORS . ............................................................................... 43
MATEMATIKA
Aplikovaná matematika
Аубакирова Г.А. ДИАЛОГТІК ОҚЫТУ ТІРБИЕ ЖҰМЫСЫНДА............... 56
Зинченко А.Б., Королевская Е.Л. ОПТИМАЛЬНЫЕ КОАЛИЦИОННЫЕ
СТРУКТУРЫ ДЛЯ ЧАСТНОГО КЛАССА НЕЧЕТКИХ ИГР . ......................... 62

Moderní vymoženosti vědy – 2017 • Díl 8
84
OBSAH
TECHNICKÉ VĚDY
Větev inženýrství
Женсикбай Ж.Ж.,Болатхан Н., Толеуов К.К., Калиев Б.З. ЗАДАЧИ
ТЕХНИЧЕСКОЙ ДИАГНОСТИКИ СИЛОВЫХ АГРЕГАТОВ .......................... 3
Арсланова Г. Р., Габидуллин А. М., Зайнуллина Р. Р., Степанова Т. О.
ПОЛУЧЕНИЕ БИОЛОГИЧЕСКИ АКТИВНЫХ ВЕЩЕСТВ ИЗ ДРЕВЕСИНЫ
МЕТОДОМ ЭКСТРАКЦИИ ................................................................................ 10
Transport
Кабикенов С.Ж., Жунусбекова Ж.Ж, КЛАССИФИКАЦИЯ СИЛ
СОПРОТИВЛЕНИЯ ДВИЖЕНИЮ РАБОЧИХ ОРГАНОВ
ВРАЩАТЕЛЬНОГО ДЕЙСТВИЯ ...................................................................... 13
Фомін О.В., Стецько А.А. ФОРМАЛІЗОВАНЕ ОПИСАННЯ
ПОТЕНЦІЙНИХ ПОПЕРЕДНЬО НАПРУЖЕНИХ ВАГОННИХ СКЛАДОВИХ
............................................................................................................................. 17
Уриналиева А.А. ОРГАНИЗАЦИЯ АГРЕГАТНОГО МЕТОДА РЕМОНТА В
АВТОТРАКТОРНОМ ПАРКЕ ........................................................................... 19
Cherepakha A. , Kopytkov D. THE MODEL DEVELOPMENT TO CREATE
THE VIRTUAL CARGO DELIVERY ROUTES IN THE SERVICE REGION .... 23
Moderní vymoženosti vědy – 2017 • Díl 8
5
различными газоперекачивающими агрегатами (ГПА) суммарной мощностью
свыше 5…7 млн. кВт.
Техническое диагностирование газоперекачивающего агрегата, как
правило решает три типа задач [1,2,3]:
Первый тип. Определение технического состояния, в котором находится
объект или его элементы в данный момент времени: от заключения «годен - не
годен», применительно ко всей установке, до поэлементного анализа состояния
отдельных узлов и агрегатов. В основном это и есть главная задача диагностиро-
вания, решение которой позволяет сделать вывод о гарантированной исправной
работе объекта в данный период времени.
Второй тип. Задачи по определению состояния, в котором окажется
изучаемая система (или ее элементы) в определенный будущий момент времени.
Это мероприятия по прогнозу, проводимые для определения безотказного
периода работы, при дальнейшем развитии выявленных неисправностей
необходимые для установления сроков проведения профилактических осмотров
и текущих ремонтов.
Третий тип. Установление технического состояния, в котором вышедший
из строя объект находился в некоторый момент времени в прошлом и истинных
причин, приведших к отказу. Как правило, это задачи «генеза», которые должны
решаться в связи с расследованием происшествий или предпосылок к ним.
Последовательная постановка этих задач может обеспечить [1]: прямое
или косвенное задание класса возможных, наиболее вероятных дефектов,
неисправностей, отказов, аварийных ситуаций и случайных нештатных входных
воздействий; взаимосвязи неисправностей и последовательность их
возникновения; наличие формализованных методов построения алгоритмов ди-
агностирования, реализация которых обеспечивает обнаружение дефектов за-
данного класса с требуемой полнотой или их поиск с необходимой глубиной;
распознавание трудноразличимых между собой неисправностей, что определяет
степень детализации поиска и служит качественным показателем эффективности
диагностирования; обеспечение быстрого поиска для выявления и устранения
дефектов и неисправностей агрегатов и систем или их регулировки с целью
сокращения времени простоя и эксплуатационных затрат.

Moderní vymoženosti vědy – 2017 • Díl 8
6
Общая схема пошаговой последовательности принципиального решения
задач технической диагностики приведена на рисунке 1.1 [1].
Самым важным моментом в данной работе является определение
значимых проблем при разработке систем диагностирования и получение в
достаточном объеме достоверной информации о техническом состоянии
исследуемого объекта. Сбор такого рода данных возможен только путем
применения надежных измерительных систем, использующих современные
аппаратные средства, обеспечивающие высокую точность измерений и
автоматическую возможность анализа различных ситуации.
В настоящее время, в практике эксплуатации ГПА, для их диагностики
используется в основном пять групп методов неразрушающего контроля
текущего технического состояния сложной технической системы [1].
1.Вибрационная и параметрическая диагностика (динамические методы)
- контроль вибраций, шумов, ПДК вредных выбросов, систематически контроль
текущих параметров.
2. Контроль загрязнений при работе агрегата (трибодиагностика) - метод
определения присутствия "продуктов" износа в смазке, который соотносится
качественно и количественно со степенью изнашивания того или иного элемента
в парах трения.
3.Методы дефектоскопии (определении повреждений элементов машин в
основном после разборки в процессе ремонта) - методы неразрушающего
контроля, предназначенные для обнаружения и предупреждения появления де-
фектов или определенного типа разрушений таких как: нарушение сплошности
и однородности материала и изделия, испытания на герметичность, контроль за
скоростью коррозии, эмиссией волны от нагрузки, определение запахов и т.д.
4.Прогнозирование развития обнаруженного дефекта (или
неисправности) во времени с целью предупреждения возникновения возможных
критических ситуаций.
Moderní vymoženosti vědy – 2017 • Díl 8
83
Литература.
1. PID controller. [Electronic resource]. - Mode of access:
https://en.wikipedia.org/wiki/PID_controller, 2017.
2. Ефимов И. И еще о ПИД - регуляторах. [Electronic resource]. - Mode
of access: http://copterpilot.ru/articles/o-pid-regulyatorax-2/, 2014.
3. Mission Planner Home. [Electronic resource]. - Mode of access:
http://ardupilot.org/planner/, 2017.
4. Ефимов И. Программируем квадрокоптер на Arduino (часть 1).
[Electronic resource]. - Mode of access:
https://habrahabr.ru/post/227425/, 2014.

Moderní vymoženosti vědy – 2017 • Díl 8
82
2. Изменяют I пока коррекция после отклонения коптера не станет
недопустимо слабой, затем его немного увеличивают;
3. Уменьшают D до тех пор, пока стабилизация после резких движений
органами управления не станет слишком медленной. После этого D немного
увеличивают.
После этих настроек можно немного уменьшить Р. Должен быть
выбран компромисс между оптимальными настройками стабильного зависания
и обычным полетом мультикоптера. Из приведенного выше видно, что настройка
PID - регулятор требует определенного опыта и искусства. Автоматическая
подстройка PID параметров не представляется возможной.
Для экспериментальной модели рассматриваемого квадрокоптера на
раме F450, настройки PID - регулятора представлены на рисунке 1, которые были
установлены в программе mission planner[3] для прошивки MegapirateNG
3.1.5R2.
Рис.1. Значения параметров PID - регулятора
Выводы.
1. Рассмотрена практическая настройка PID - регулятора на прошивках
MegapirateNG 2.7R4, 2.8R3 и MegapirateNG 3.1.5R2 для полетного контроллера
на основе Arduino Mega256. Выявлен более устойчивый полет коптера на базе
дефолтных настроек для прошивки MegapirateNG 3.1.5R2.
2. Показано назначение каждого параметра PID - регулятора при
получении его формулы применительно для коптера в двумерном пространстве,
где у него есть только один угол - угол крена.
3. Дана практическая рекомендация настройки PID - регулятора для
мультироторных систем.
Moderní vymoženosti vědy – 2017 • Díl 8
7
Рисунок. 1. Принципиальная схема решения задач технической
диагностики
Техническая система как
объект диагностирования
Установление класса опасности
технической системы в целом, и
ее элементов
Выявление возможных
состояний технической
системы и ее элементов
подлежащих распознаванию
Разработка и утверждение руководящих документов
Обучение персонала Комплектация приборного
оснащения
Определение элементов
подлежащих контролю:
постоянному, периодическому Разделение технической системы
на подсистемы и технические
блоки
Выбор методов и средств
неразрушающего контроля на
работающем агрегате
Анализ параметров объекта для
выявления информативных
параметров
Испытания системы по выявлению и
уточнению диагностических параметров
Составление схем диагностирования
Разработка действующей системы диагностирования
объекта

Moderní vymoženosti vědy – 2017 • Díl 8
8
5.Анализ и предупреждение появления возможных нежелательных
событий в соответствии с разработанным прогнозом отказов, на основании
«прецедентов», изучения технической и ремонтной документации, опыта
предыдущей эксплуатации.
Из представленных методов, первые три метода можно отнести к методам
активного или оперативного контроля, остальные - к пассивному. Из практики
эксплуатации известно, что лучше всего задачи диагностики решаются при
комплексном или совместном использовании нескольких методов.
Из методов активного контроля текущего технического состояния систе-
мы, в период нахождения агрегата в рабочем состоянии наиболее важны первый
и второй: динамический (вибрационная и параметрическая диагностика) и
контроль загрязнений [1 ].
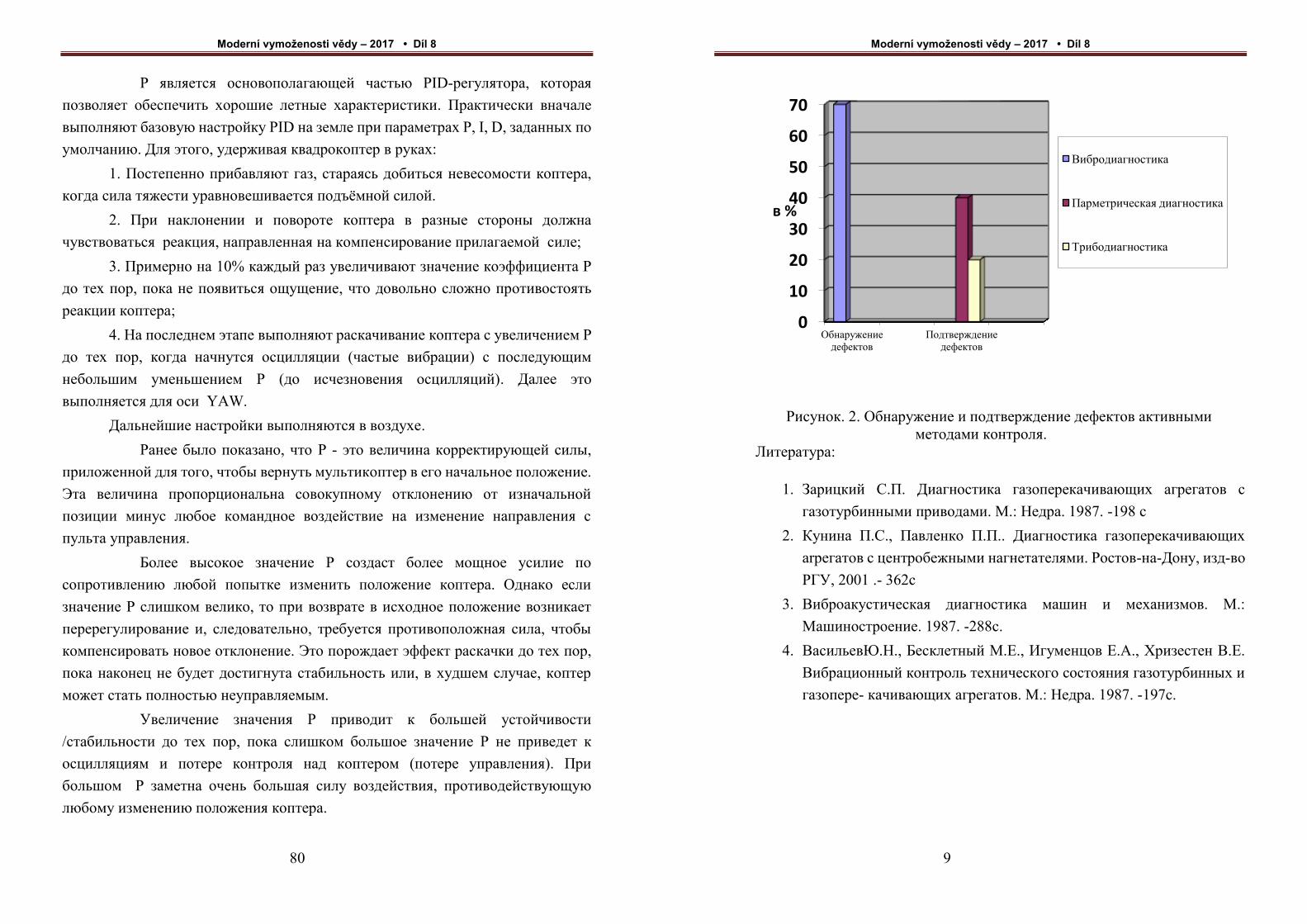
Если оценить вклад каждого из методов в изучение текущего состояния
компрессорной установки [2] (рисунок 1.), то большая часть дефектов и неис-
правностей, примерно 60-70%,
Из существующих динамических методов технической диагностики как
показывают проведенные исследования (термическая индикация,
ароматическая диагностика, рентгенография, радиоволновое диагностирование,
интроскопия, диагностирование по спектральному анализу радиоактивных
изотопов, по угару масла и пр.) для оценки технического состояния газопе-
рекачивающих агрегатов наиболее эффективны вибродиагностика [3],
параметрическая диагностика и трибодиагностика [2].
Moderní vymoženosti vědy – 2017 • Díl 8
81
Уменьшение значения Р приведет к дрейфу в управлении. Если Р
слишком мало, коптер становится очень нестабильным. Коптер будет меньше
сопротивляться любым попыткам изменить его положение.
Пилотажные (акробатические) полеты требуют чуть более высоких Р,
аккуратные и плавные полеты – чуть более низкого Р.
I – это период времени, в течение которого записываются и
усредняются угловые отклонения.
Величина силы, прикладываемой для возврата в исходное положение,
увеличивается, если с течением времени угловое отклонение сохраняется, пока
не будет достигнута максимальная величина усилия. Более высокое значение I
способствует улучшению курсовой устойчивости.
Увеличение значения I улучшает способность удерживать начальное
положение и уменьшает дрейф, но так же увеличивает задержку возврата в
начальное положение и уменьшает влияние Р.
Уменьшение значения I улучшает реакцию на изменения, но
увеличивает дрейф и уменьшит способность удерживать положение. Так же
увеличивает влияние Р.
Пилотажный режим требует меньших значений I. Аккуратное плавное
руление требует больших значений I.
D – это скорость, с которой мультикоптер вернется в начальное
положение. Высокие D означают, что мультикоптер вернется в первоначальное
положение очень быстро.
Увеличение значения D увеличивает скорость, с которой все
отклонения будут скомпенсированы. Количество колебаний при возврате в
исходное положение уменьшается. Но здесь увеличивается вероятность
появления перерегулирования и осцилляций.
Уменьшение D увеличивает количество колебаний при возврате в
начальное положение. Возврат в начальное положение происходит медленнее.
При пилотажном режиме увеличивают D. Аккуратные плавные
полеты требуют уменьшения D. Вышесказанное можно промоделировать на
виртуальном PID - регуляторе на страничке [2].
Практическая настройка для реализации стабильных полетов:
1. Увеличивают значение Р до появления осцилляций, затем его немного
уменьшают;
Moderní vymoženosti vědy – 2017 • Díl 8
80
Р является основополагающей частью PID-регулятора, которая
позволяет обеспечить хорошие летные характеристики. Практически вначале
выполняют базовую настройку PID на земле при параметрах P, I, D, заданных по
умолчанию. Для этого, удерживая квадрокоптер в руках:
1. Постепенно прибавляют газ, стараясь добиться невесомости коптера,
когда сила тяжести уравновешивается подъёмной силой.
2. При наклонении и повороте коптера в разные стороны должна
чувствоваться реакция, направленная на компенсирование прилагаемой силе;
3. Примерно на 10% каждый раз увеличивают значение коэффициента Р
до тех пор, пока не появиться ощущение, что довольно сложно противостоять
реакции коптера;
4. На последнем этапе выполняют раскачивание коптера с увеличением Р
до тех пор, когда начнутся осцилляции (частые вибрации) с последующим
небольшим уменьшением Р (до исчезновения осцилляций). Далее это
выполняется для оси YAW.
Дальнейшие настройки выполняются в воздухе.
Ранее было показано, что Р - это величина корректирующей силы,
приложенной для того, чтобы вернуть мультикоптер в его начальное положение.
Эта величина пропорциональна совокупному отклонению от изначальной
позиции минус любое командное воздействие на изменение направления с
пульта управления.
Более высокое значение Р создаст более мощное усилие по
сопротивлению любой попытке изменить положение коптера. Однако если
значение Р слишком велико, то при возврате в исходное положение возникает
перерегулирование и, следовательно, требуется противоположная сила, чтобы
компенсировать новое отклонение. Это порождает эффект раскачки до тех пор,
пока наконец не будет достигнута стабильность или, в худшем случае, коптер
может стать полностью неуправляемым.
Увеличение значения Р приводит к большей устойчивости
/стабильности до тех пор, пока слишком большое значение Р не приведет к
осцилляциям и потере контроля над коптером (потере управления). При
большом P заметна очень большая силу воздействия, противодействующую
любому изменению положения коптера.
Moderní vymoženosti vědy – 2017 • Díl 8
9
Рисунок. 2. Обнаружение и подтверждение дефектов активными
методами контроля.
Литература:
1. Зарицкий С.П. Диагностика газоперекачивающих агрегатов с
газотурбинными приводами. М.: Недра. 1987. -198 с
2. Кунина П.С., Павленко П.П.. Диагностика газоперекачивающих
arpeгaтов с центробежными нагнетателями. Ростов-на-Дону, изд-во
РГУ, 2001 .- 362с
3. Виброакустическая диагностика машин и механизмов. М.:
Машиностроение. 1987. -288с.
4. ВасильевЮ.Н., Бесклетный М.Е., Игуменцов Е.А., Хризестен В.Е.
Вибрационный контроль технического состояния газотурбинных и
газопере- качивающих агрегатов. М.: Недра. 1987. -197с.
0
10
20
30
40
50
60
70
Обнаружение
дефектов
Подтверждение
дефектов
в %
Вибродиагностика
Парметрическая диагностика
Трибодиагностика

Moderní vymoženosti vědy – 2017 • Díl 8
10
Арсланова Г. Р., Габидуллин А. М., Зайнуллина Р. Р., Степанова Т. О. Получение биологически активных веществ из древесины методом экстракции
Маг. Арсланова Г. Р., маг. Габидуллин А. М., маг. Зайнуллина Р. Р., маг.
Степанова Т. О.
Казанский национальный исследовательский технологический
университет, Россия
ПОЛУЧЕНИЕ БИОЛОГИЧЕСКИ АКТИВНЫХ ВЕЩЕСТВ ИЗ ДРЕВЕСИНЫ МЕТОДОМ ЭКСТРАКЦИИ
В последние годы в развитых странах наблюдается тенденция к
увеличению применения лекарственных растений и экстрактов из них взамен
синтетических лекарственных препаратов. Так как они обладают рядом
преимуществ перед вторыми, а именно: низкий риск развития побочных
эффектов, безопасное лечение, широкая доступность и дешевизна. Важное место
среди источников природных лекарственных веществ занимают ива и осина. В
почках, листьях и ветвях осины содержатся углеводы (рафиноза, фруктоза и др.),
ароматические кислоты, триглицериды фенолкарбоновых кислот, органические
кислоты, каротиноиды, витамин C, каротин, флавоноиды, фенолгликозиды,
антоцианы и дубильные вещества. Препараты, содержащие экстракт осины
коры, обладают жаропонижающим, желчегонным, противовоспалительным,
гепатозащитным, противомикробным, противокашлевым и антигельминтным
свойствами [1]. Ивовые растения содержат в коре, ветвях и листьях большое
число фенольных гликозидов. Экстракты из этих растений широко используются
в фитотерапии многих стран и обладают антиревматическими,
антисептическими, противовоспалительными, обезболивающими свойствами
[1]. Также доказано, что экстракт коры ивы ингибирует рост опухолевых клеток
Получение биологически активных добавок методом экстракции
позволяет решить две задачи: расширение ассортимента и сырьевой базы для
лекарственных препаратов, и утилизации отходов деревоперерабатывающих
производств [2]. К основному биологически активному веществу в древесине
ивы и осины можно отнести фенольные гликозиды, в частности салицин и его
производные.
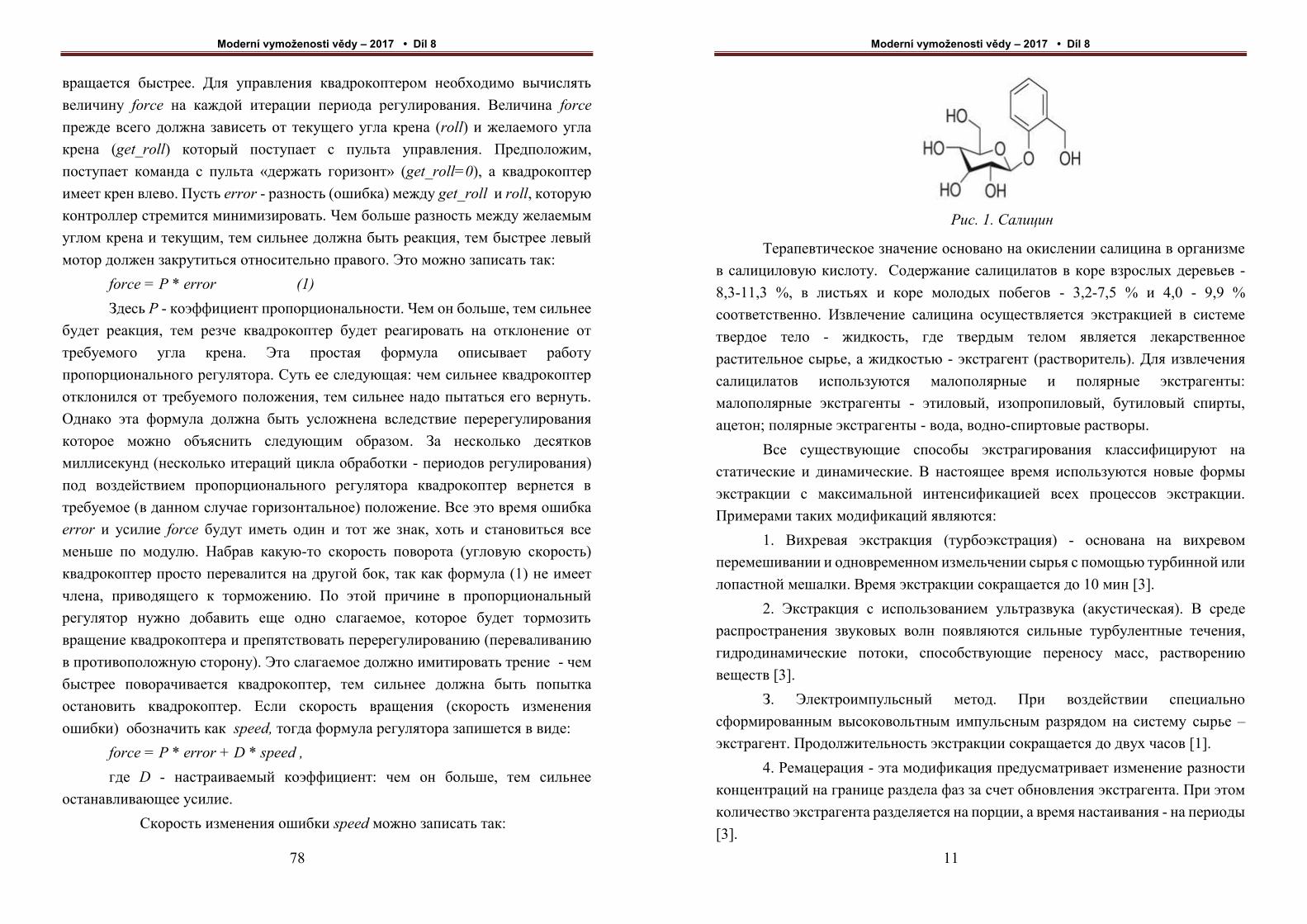
Салицин (Salicin) (рис. 1) — кристаллический глюкозид салицилового
спирта или салигенина. Он имеет горький вкус, нейтральную реакцию.
Moderní vymoženosti vědy – 2017 • Díl 8
79
speed = derror /dt
Или в разностной форме:
speed ~ (error-errorprevious)/t
Здесь: t - период регулирования, errorprevious - значение ошибки с
предыдущей итерации цикла регуляции.
Пусть левый край будет весить чуть больше правого. Тогда
квадрокоптер будет немного наклонен влево. Повернуться обратно
(выровняться) он не сможет, так как дифференциальное слагаемое равно нулю,
а пропорционального слагаемого не хватает, чтобы вернуть квадрокоптер в
горизонтальное положение, так как левый край весит чуть больше правого.
Вследствие этого квадрокоптер будет тянуть влево. Поэтому необходим
механизм, который бы отслеживал такие отклонения и исправлял их.
Характерной особенностью таких ошибок является то, что они проявляют себя
со временем. Поэтому здесь можно ввести интегральное слагаемое. Оно хранит
сумму всех ошибок error по всем итерациям цикла обработки. Если после
стабилизации квадрокоптера существует error, например 1 градус, то через 10
циклов регулирования по 0.1сек. сумма примет значение 1+0.8+0.7 +... <10
градусов. Если результат умножить на цикл регулирования, в данном примере
0.1сек, то получим число < 1. Таким образом здесь имеем дело с интегральной
величиной:
errort
Или в интегральной форме
errortdterrorT
0
Окончательная формула для пропорционально-интегрально-
дифференциального регулятора имеет вид:
force = P * error +I *t error + D *(error-errorprevious)/t
или в интегральной форме:
dt
derrorDdterrorIerrorPforce
T
0
,
которая совпадает с известной формулой PID - регулятора[1].
Ниже представлена практическая настройка PID - регулятора
квадрокоптера.
Moderní vymoženosti vědy – 2017 • Díl 8
78
вращается быстрее. Для управления квадрокоптером необходимо вычислять
величину force на каждой итерации периода регулирования. Величина force
прежде всего должна зависеть от текущего угла крена (roll) и желаемого угла
крена (get_roll) который поступает с пульта управления. Предположим,
поступает команда с пульта «держать горизонт» (get_roll=0), а квадрокоптер
имеет крен влево. Пусть error - разность (ошибка) между get_roll и roll, которую
контроллер стремится минимизировать. Чем больше разность между желаемым
углом крена и текущим, тем сильнее должна быть реакция, тем быстрее левый
мотор должен закрутиться относительно правого. Это можно записать так:
force = P * error (1)
Здесь P - коэффициент пропорциональности. Чем он больше, тем сильнее
будет реакция, тем резче квадрокоптер будет реагировать на отклонение от
требуемого угла крена. Эта простая формула описывает работу
пропорционального регулятора. Суть ее следующая: чем сильнее квадрокоптер
отклонился от требуемого положения, тем сильнее надо пытаться его вернуть.
Однако эта формула должна быть усложнена вследствие перерегулирования
которое можно объяснить следующим образом. За несколько десятков
миллисекунд (несколько итераций цикла обработки - периодов регулирования)
под воздействием пропорционального регулятора квадрокоптер вернется в
требуемое (в данном случае горизонтальное) положение. Все это время ошибка
error и усилие force будут иметь один и тот же знак, хоть и становиться все
меньше по модулю. Набрав какую-то скорость поворота (угловую скорость)
квадрокоптер просто перевалится на другой бок, так как формула (1) не имеет
члена, приводящего к торможению. По этой причине в пропорциональный
регулятор нужно добавить еще одно слагаемое, которое будет тормозить
вращение квадрокоптера и препятствовать перерегулированию (переваливанию
в противоположную сторону). Это слагаемое должно имитировать трение - чем
быстрее поворачивается квадрокоптер, тем сильнее должна быть попытка
остановить квадрокоптер. Если скорость вращения (скорость изменения
ошибки) обозначить как speed, тогда формула регулятора запишется в виде:
force = P * error + D * speed ,
где D - настраиваемый коэффициент: чем он больше, тем сильнее
останавливающее усилие.
Скорость изменения ошибки speed можно записать так:
Moderní vymoženosti vědy – 2017 • Díl 8
11
Рис. 1. Салицин
Терапевтическое значение основано на окислении салицина в организме
в салициловую кислоту. Содержание салицилатов в коре взрослых деревьев -
8,3-11,3 %, в листьях и коре молодых побегов - 3,2-7,5 % и 4,0 - 9,9 %
соответственно. Извлечение салицина осуществляется экстракцией в системе
твердое тело - жидкость, где твердым телом является лекарственное
растительное сырье, а жидкостью - экстрагент (растворитель). Для извлечения
салицилатов используются малополярные и полярные экстрагенты:
малополярные экстрагенты - этиловый, изопропиловый, бутиловый спирты,
ацетон; полярные экстрагенты - вода, водно-спиртовые растворы.
Все существующие способы экстрагирования классифицируют на
статические и динамические. В настоящее время используются новые формы
экстракции с максимальной интенсификацией всех процессов экстракции.
Примерами таких модификаций являются:
1. Вихревая экстракция (турбоэкстрация) - основана на вихревом
перемешивании и одновременном измельчении сырья с помощью турбинной или
лопастной мешалки. Время экстракции сокращается до 10 мин [3].
2. Экстракция с использованием ультразвука (акустическая). В среде
распространения звуковых волн появляются сильные турбулентные течения,
гидродинамические потоки, способствующие переносу масс, растворению
веществ [3].
З. Электроимпульсный метод. При воздействии специально
сформированным высоковольтным импульсным разрядом на систему сырье –
экстрагент. Продолжительность экстракции сокращается до двух часов [1].
4. Ремацерация - эта модификация предусматривает изменение разности
концентраций на границе раздела фаз за счет обновления экстрагента. При этом
количество экстрагента разделяется на порции, а время настаивания - на периоды
[3].

Moderní vymoženosti vědy – 2017 • Díl 8
12
Из динамических методов используется способ - перколяция.
Перколяция - это процесс непрерывной фильтрации, процеживания
экстрагента сквозь слой сырья. Наиболее широко применяется многократная
перколяция. Сущность ее заключается в использовании батарей диффузоров.
При этом вытяжка из одного перколятора используется для перколирования
сырья в следующем перколяторе/
Использование лекарственных препаратов на основе лечебных растений
неизмеримо растет. Однако, существующие на сегодняшний день способы
экстракции салицилатов не позволяют извлекать максимально возможное его
количество.
Литература:
1. Арсланова, Г. Р. Получение биологически активных веществ из
древесины осины методом экстракции. / Г. Р. Арсланова, Р. С.
Альмухаметов, А. Р. Шакиров// Воронеж. гос. ун-т инж. технол. –
Воронеж: ВГУИТ, 2016. – 624 с
2. Габидуллин А. М. Экспериментальная установка термической
переработки древесного сырья под давлением / А. М. Габидуллин,
А. Р. Садртдинов, Г. Р. Арсланова // сборник статей
Международной научно - практической конференции г. Омск Ч.2 /
- Уфа: МЦИИ ОМЕГА САЙНС, 2016. – 183 с
3. Арсланова Г. Р. Закономерности процесса экстракции
растительного сырья / Г. Р. Арсланова, Т. О. Степанова, А. М.
Габидуллин // Международная научная конференция Areas of
scientific thought, 2017. – 19-22 с.
Moderní vymoženosti vědy – 2017 • Díl 8
77
стабильность тестового полета. Осцилляции наблюдались лишь при высоких
оборотах двигателей. Загрузка прошивки MegapirateNG 3.1.5R2 показало
стабильность полета квадрокоптера для параметров PID регуляторов,
установленных по умолчанию. Рассмотрим схему назначения параметров PID
регуляторов для обеспечения стабильного полета квадрокоптера для
рассматриваемых здесь прошивках. Для лучшего представления принципа
настройки параметров PID регулятора рассмотрим следующее объяснение его
работы.
PID-регулятор представляет математический аппарат, который
применяется почти во всех задачах стабилизации: стабилизация углов
квадрокоптера в воздухе, полет и удержание позиции по GPS, удержание высоты
по барометру, бесколлекторные механизмы стабилизации видеокамеры в полете
(подвес камеры). Рассмотрим формулу PID-регулятора, предполагая, что
квадрокоптер имеет только угол крена (Roll) и два двигателя (плоская модель).
В полетный контроллер непрерывно поступают команды с земли:
«крен 30 градусов», «крен -10 градусов», «крен 0 градусов (держать горизонт)».
Задача контроллера - быстрее и точнее их выполнять с помощью моторов с
учетом: ветра, неравномерного распределения веса квадрокоптера, инерции
квадрокоптера и т.д. Поэтому им постоянно решается задача, какую скорость
вращения необходимо подавать на каждый мотор с учетом текущего значения
угла крена и требуемого. Adruino одну итерацию цикла обработки и управления
может выполнять за 10 миллисекунд, которые являются периодом
регулирования. Чем меньше период, тем точнее происходит регулирование.
Уровень открытия дроссельной заслонки, который поступает из
приемника в передатчик обозначим throttle. Это среднее арифметическое между
скоростями вращения всех моторов, выраженное в процентах от максимальной
скорости вращения. Если left и right - скорости вращения левого и правого
моторов, то:
left = throttle + force,
right = throttle - force.
Здесь force - приведенная к скорости вращения реакция (усилие)
квадрокоптера, которая создает момент вращения за счет того, что левый мотор
вращается на force быстрее, чем throttle, а правый на force медленнее. Ясно, что
force может принимать и отрицательные значения, тогда правый мотор

Moderní vymoženosti vědy – 2017 • Díl 8
76
MODERNÍCH INFORMAČNÍCH TECHNOLOGIÍ
Computer engineering
Мясищев А.А. НАСТРОЙКА PID РЕГУЛЯТОРОВ ДЛЯ ПОЛЕТНОГО КОТРОЛЛЕРА НА БАЗЕ ARDUINO MEGA256 И ПРОШИВКИ MEGAPIRATENG
Мясищев А.А.
Хмельницкий национальный университет, Украина
НАСТРОЙКА PID РЕГУЛЯТОРОВ ДЛЯ ПОЛЕТНОГО КОТРОЛЛЕРА НА БАЗЕ ARDUINO MEGA256 И ПРОШИВКИ MEGAPIRATENG
В последнее время высокую степень интереса вызывают дроны или
беспилотные летающие роботы, построенные на базе мультикоптеров. Среди
них наиболее распространенным является четырехмоторный коптер -
квадрокоптер. Сейчас они используются для исследования местности, для
проведения спасательных операций МЧС, в работе пожарных служб, военной
разведки. Рассмотрим обеспечение стабилизации полета квадрокоптера на
основе полетного контроллера, собранного на базе микроконтроллера
atmega2560. В состав полетного контроллера входят:
- Микроконтроллер ATMega 2560-16AU на плате Arduino Mega 256;
- 6-ти осевой гироскоп-акселерометр MPU6050;
- 3-х осевой компас HMC5883L
- барометр/высотомер BMP180;
- GPS приемник u-blox NEO-6M.
Полетный контроллер установлен на раме F450 с пропеллерами размером
10х45". Для этого полетного контроллера использовались прошивки
MegapirateNG 2.7R4, 2.8R3 и MegapirateNG 3.1.5R2, конфигурационные файлы
которых были откорректированы для использованного набора микросхем-
датчиков. Испытания показали, что для одинаковых параметрах квадрокоптера
наиболее нестабильной прошивкой оказалась MegapirateNG 2.8R3. При тестовом
полете наблюдались сильные осцилляции по Pitch, Roll даже при средних
оборотах двигателей. Параметры PID регуляторов были установлены по
умолчанию, как в прошивке. Переход к MegapirateNG 2.7R4 показал большую
Moderní vymoženosti vědy – 2017 • Díl 8
13
Transport
Кабикенов С.Ж., Жунусбекова Ж.Ж, КЛАССИФИКАЦИЯ СИЛ СОПРОТИВЛЕНИЯ ДВИЖЕНИЮ РАБОЧИХ ОРГАНОВ ВРАЩАТЕЛЬНОГО ДЕЙСТВИЯ
Кандидат технических наук, доцент Кабикенов С.Ж.
Докторант Жунусбекова Ж.Ж.
Карагандинский государственный технический университет,
Казахстан
КЛАССИФИКАЦИЯ СИЛ СОПРОТИВЛЕНИЯ ДВИЖЕНИЮ РАБОЧИХ ОРГАНОВ ВРАЩАТЕЛЬНОГО ДЕЙСТВИЯ
Разработка новых высокопроизводительных машин, специально
предназначенных для проходки узких глубоких траншей и внедрение на их
основе рациональных технологических схем, позволит значительно повысить
эффективность способа «стена в грунте». В связи с этим, при проектировании
машин специально предназначенных для проходки узких глубоких траншей и
внедрение на их основе рациональных технологических схем возникает вопрос
установления сил сопротивления движению рабочих органов землеройных
машин.
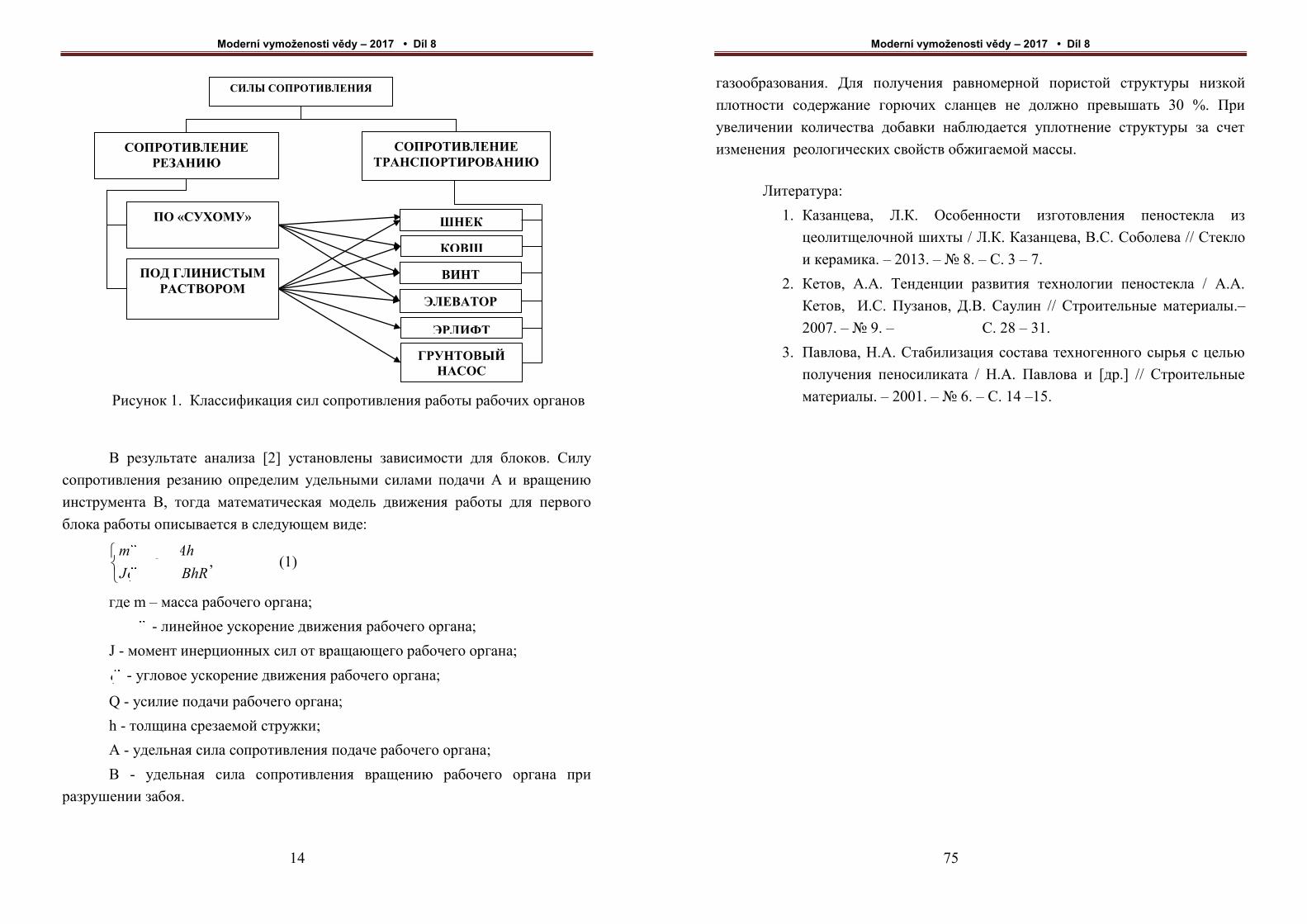
Для установления сил сопротивления работы землеройных машин
проведена классификация сил. Классификация показывает что, при работе
землеройных машин рабочими органами возникают силы резания и
транспортирования (рисунок 1) [1].
Резания грунта осуществляется по «сухому» забою и под глинистым
раствором. Разрушенный грунт при «сухом» способе транспортируется шнеком,
ковшом, винтом, также элеватором. Под глинистым раствором разрушенный
грунт транспортируется эрлифтом и грунтовым раствором.
Представленная классификация сил сопротивления движению работы
рабочих органов дает четыре блоков работы: 1 блок - сопротивление резанию по
сухому без влияния транспортера; 2. блок - сопротивление резанию по сухому с
влиянием транспортера; 3. блок - под водой (в жидкости) без влияния
транспортера; 4. блок - под водой (в жидкости) с влиянием транспортера.
Moderní vymoženosti vědy – 2017 • Díl 8
14
Рисунок 1. Классификация сил сопротивления работы рабочих органов
В результате анализа [2] установлены зависимости для блоков. Силу
сопротивления резанию определим удельными силами подачи А и вращению
инструмента В, тогда математическая модель движения работы для первого
блока работы описывается в следующем виде:
,mz Q Ah
J M BhR
(1)
где m – масса рабочего органа;
z - линейное ускорение движения рабочего органа;
J - момент инерционных сил от вращающего рабочего органа;
- угловое ускорение движения рабочего органа;
Q - усилие подачи рабочего органа;
h - толщина срезаемой стружки;
А - удельная сила сопротивления подаче рабочего органа;
В - удельная сила сопротивления вращению рабочего органа при
разрушении забоя.
СИЛЫ СОПРОТИВЛЕНИЯ
СОПРОТИВЛЕНИЕ
РЕЗАНИЮ
СОПРОТИВЛЕНИЕ
ТРАНСПОРТИРОВАНИЮ
ПО «СУХОМУ»
ПОД ГЛИНИСТЫМ
РАСТВОРОМ
КОВШ
ЭЛЕВАТОР
ВИНТ
ШНЕК
ГРУНТОВЫЙ
НАСОС
ЭРЛИФТ
Moderní vymoženosti vědy – 2017 • Díl 8
75
газообразования. Для получения равномерной пористой структуры низкой
плотности содержание горючих сланцев не должно превышать 30 %. При
увеличении количества добавки наблюдается уплотнение структуры за счет
изменения реологических свойств обжигаемой массы.
Литература:
1. Казанцева, Л.К. Особенности изготовления пеностекла из
цеолитщелочной шихты / Л.К. Казанцева, В.С. Соболева // Стекло
и керамика. – 2013. – № 8. – C. 3 – 7.
2. Кетов, А.А. Тенденции развития технологии пеностекла / А.А.
Кетов, И.С. Пузанов, Д.В. Саулин // Строительные материалы.–
2007. – № 9. – С. 28 – 31.
3. Павлова, Н.А. Стабилизация состава техногенного сырья с целью
получения пеносиликата / Н.А. Павлова и [др.] // Строительные
материалы. – 2001. – № 6. – С. 14 –15.

Moderní vymoženosti vědy – 2017 • Díl 8
74
Рисунок 2 – Влияние горючих сланцев на структуру пеностекла
Рисунок 3 – Микроструктура пеностекла из шихты с 20 % горючих
сланцев
Исследованы пирогенные превращения при различных режимах обжига
стекольной шихты. Для получения пеностекла с наименьшим значением
плотности и равномерной пористостью целесообразен двухстадийный обжиг.
Выводы. Установлено влияние горючих сланцев в стекольной шихте на
пиропластические изменения материала и характер образования пористой
структуры. Введение углеродсодержащего наполнителя в стекольную шихту
снижает температуру вспучивания, обеспечивает дополнительный источник
0
%
2
0 %
Moderní vymoženosti vědy – 2017 • Díl 8
15
Математическая модель движения работы по «сухому», с влиянием
транспортера описывается в следующем виде:
,реакmz Q Ah Pz P
J М ВRh
(2)
где Рреак - реактивная сила со стороны транспортера;
Рz - вес грунта на одном метре длины транспортера.
Математическая модель движения работы под водой (в жидкости) без
влияния транспортераописывается в следующем виде:
2,
z в в
z р
mz Q А Zh P k Z k Z
J М В ZhR k
(3)
где АαzZh – величина, определяющая сопротивление подаче рабочего
органа со стороны забоя;
Рв–выталкивающая сила, действующая на часть рабочего органа,
постоянно находящуюся в жидкости;
kвZ – сила, действующая на часть конструкции рабочего органа (например
штангу), объем погружения в раствор которой увеличивается при возрастании
глубины траншеи;
kδZ – сила трения штанги рабочего органа о раствор;
ВαzZhR – момент от сил сопротивления разрушения грунта;
kрω2 – гидродинамическое сопротивление вращению РО.
Под водой (в жидкости) с влиянием транспортера математическая модель
движения работы описывается в следующем виде:
2.
z т в в
z р
mz Q А Zh P Рz P k Z k Z
J М В ZhR k
(4)
где Рт - реакция со стороны транспортера на забой;
Рz - вес грунта на одном метре длины транспортера.
При строительстве способом «стена в грунте» целесообразно
использовать глинистые растворы плотностью 1 т/м3 и вязкостью 30…60 с,
возрастание значений показателей плотности и вязкости оказывают сильное
влияние на увеличение сил сопротивления при движении рабочих органов в
глинистом растворе [3]. Установленные силы сопротивления рабочих органов
Moderní vymoženosti vědy – 2017 • Díl 8
16
землеройных машин являются базой для разработки математических моделей
движения работы рабочего органа вращательного действия.
Список литературы:
1. Федоров Д. И. Рабочие органы землеройных машин. М.:
Машиностроение, 1990. - 360 с.
2. Кадыров А.С., Жунусбекова Ж.Ж. Нагружение и
экспериментальное исследование конструкции рабочего органа
землеройной машины в глинистом растворе. Вестник Казахской
Академии транспорта и коммуникаций им. М. Тынышпаева,
Выпуск № 2-3 (93), Алматы, КазАТК, 2015, - С. 70 – 76.
3. Kochetkova R. G. Influence of modern stabilizers on improved
properties of clayey soils//Journal. Soil Mechanics and Foundation
Engineering. - 2012, Volume 49, Issue 1, pp 12-15.
Moderní vymoženosti vědy – 2017 • Díl 8
73
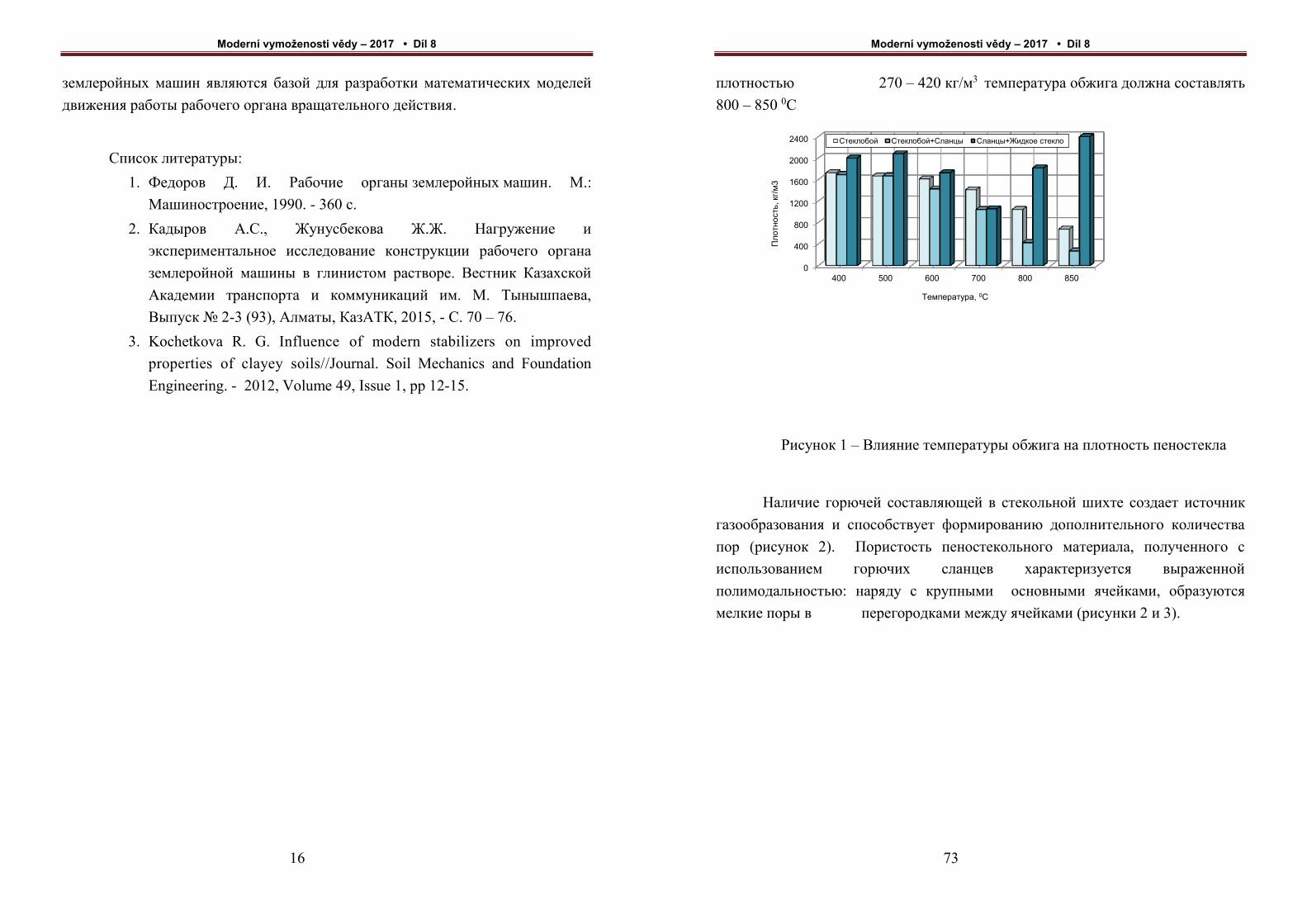
плотностью 270 – 420 кг/м3 температура обжига должна составлять
800 – 850 0С
0
400
800
1200
1600
2000
2400
400 500 600 700 800 850
Пл
отн
ость
, кг
/м3
Температура, 0С
Стеклобой Стеклобой+Сланцы Сланцы+Жидкое стекло
Рисунок 1 – Влияние температуры обжига на плотность пеностекла
Наличие горючей составляющей в стекольной шихте создает источник
газообразования и способствует формированию дополнительного количества
пор (рисунок 2). Пористость пеностекольного материала, полученного с
использованием горючих сланцев характеризуется выраженной
полимодальностью: наряду с крупными основными ячейками, образуются
мелкие поры в перегородками между ячейками (рисунки 2 и 3).
Moderní vymoženosti vědy – 2017 • Díl 8
72
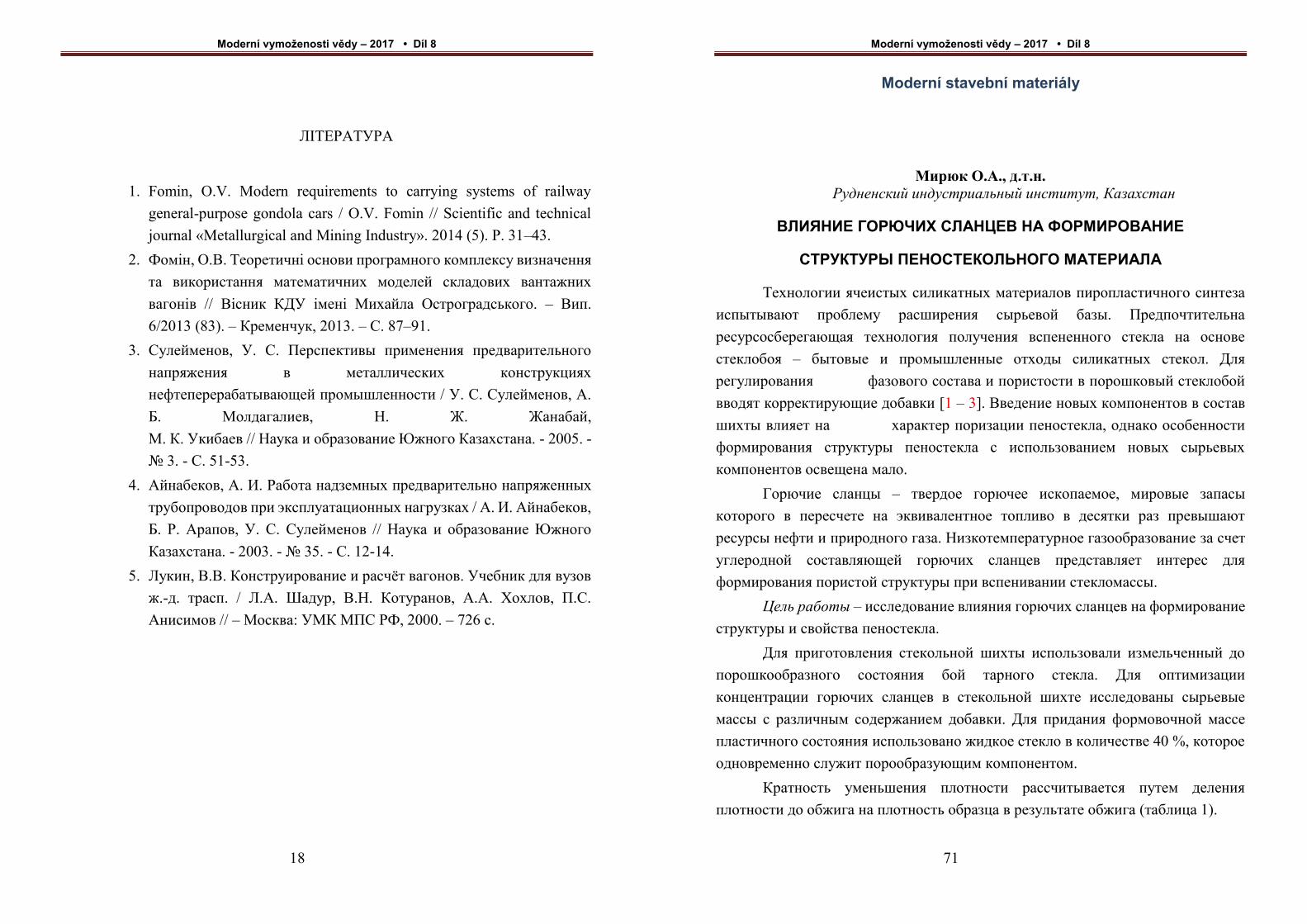
Для обеспечения высокой равномерной пористости пеностекла
содержание добавки целесообразно ограничить. Содержание добавки следует
ограничить 30 % . Наименьшая плотность при введении горючих сланцев 250
кг/м3 при содержании добавки 20 %. При увеличении добавки свыше 40 %
наблюдается ухудшение структуры.
Таблица 1 – Влияние горючих сланцев на структуру и плотность
пеностекла
Состав сырьевой шихты, % Кратность
уменьшения плотности
Коэффициент
вспучивания стеклобой горючие сланцы
100 0 5,4 0,10
90 10 7,4 0,20
80 20 6,1 0,22
70 30 3,8 0,35
60 40 3,9 0,55
50 50 2,3 0,60
40 60 2,7 0,60
30 70 2,7 1,0
20 80 2,1 1,0
10 90 1,8 1,0
0 100 1,2 1,0
Для оптимизации температуры обжига сырьевых шихт исследована
кинетика превращений материалов при обжиге в интервале температур 400 – 850 0С. В качестве объектов исследования выбраны составы сырьевых шихт, %:
стеклобой – 100; стеклобой – 80 и сланцы горючие –20; сланцы горючие – 100.
В сырьевые массы добавляли жидкое стекло. Влияние температуры обжига на
плотность пеностекла из шихт различного состава отражено на рисунке 1.
При обжиге шихты с добавлением горючих сланцев в интервале
температур 500 – 700 0С наблюдается снижение плотности, при последующем
нагреве происходит увеличение плотности за счет спекания материала и
уплотнения структуры. При обжиге шихты сложного состава (стеклобой +
сланцы горючие), начиная с 600 0С , снижается плотность, которая достигает
наименьшего значения 280 кг/м3 при 850 0С. Для получения пеностекла
Moderní vymoženosti vědy – 2017 • Díl 8
17
Фомін О.В., Стецько А.А. Формалізоване описання потенційних попередньо напружених вагонних складових
Д.т.н., проф. Фомін О. В., ст. викл. Стецько А. А.
Державний економіко-технологічний університет транспорту, Київ,
Україна
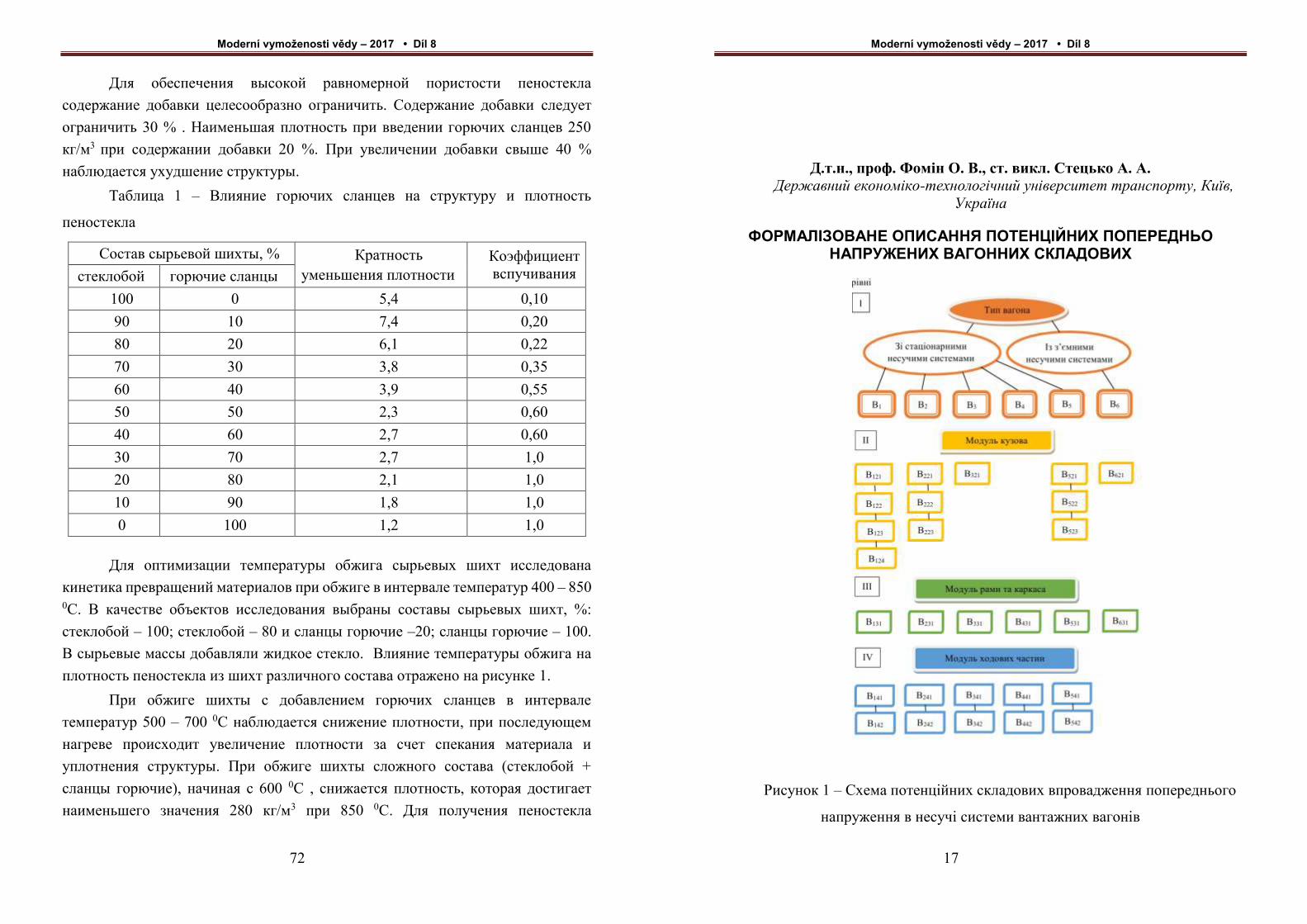
ФОРМАЛІЗОВАНЕ ОПИСАННЯ ПОТЕНЦІЙНИХ ПОПЕРЕДНЬО НАПРУЖЕНИХ ВАГОННИХ СКЛАДОВИХ
Рисунок 1 – Схема потенційних складових впровадження попереднього
напруження в несучі системи вантажних вагонів
Moderní vymoženosti vědy – 2017 • Díl 8
18
ЛІТЕРАТУРА
1. Fomin, O.V. Modern requirements to carrying systems of railway
general-purpose gondola cars / О.V. Fomin // Scientific and technical
journal «Metallurgical and Mining Industry». 2014 (5). P. 31–43.
2. Фомін, О.В. Теоретичні основи програмного комплексу визначення
та використання математичних моделей складових вантажних
вагонів // Вісник КДУ імені Михайла Остроградського. – Вип.
6/2013 (83). – Кременчук, 2013. – С. 87–91.
3. Сулейменов, У. С. Перспективы применения предварительного
напряжения в металлических конструкциях
нефтеперерабатывающей промышленности / У. С. Сулейменов, А.
Б. Молдагалиев, Н. Ж. Жанабай,
М. К. Укибаев // Наука и образование Южного Казахстана. - 2005. -
№ 3. - С. 51-53.
4. Айнабеков, А. И. Работа надземных предварительно напряженных
трубопроводов при эксплуатационных нагрузках / А. И. Айнабеков,
Б. Р. Арапов, У. С. Сулейменов // Наука и образование Южного
Казахстана. - 2003. - № 35. - С. 12-14.
5. Лукин, В.В. Конструирование и расчёт вагонов. Учебник для вузов
ж.-д. трасп. / Л.А. Шадур, В.Н. Котуранов, А.А. Хохлов, П.С.
Анисимов // – Москва: УМК МПС РФ, 2000. – 726 с.
Moderní vymoženosti vědy – 2017 • Díl 8
71
Moderní stavební materiály Мирюк О.А. Влияние горючих сланцев на формирование структуры пеностекольного материала
Мирюк О.А., д.т.н.
Рудненский индустриальный институт, Казахстан
ВЛИЯНИЕ ГОРЮЧИХ СЛАНЦЕВ НА ФОРМИРОВАНИЕ
СТРУКТУРЫ ПЕНОСТЕКОЛЬНОГО МАТЕРИАЛА
Технологии ячеистых силикатных материалов пиропластичного синтеза
испытывают проблему расширения сырьевой базы. Предпочтительна
ресурсосберегающая технология получения вспененного стекла на основе
стеклобоя – бытовые и промышленные отходы силикатных стекол. Для
регулирования фазового состава и пористости в порошковый стеклобой
вводят корректирующие добавки [1 – 3]. Введение новых компонентов в состав
шихты влияет на характер поризации пеностекла, однако особенности
формирования структуры пеностекла с использованием новых сырьевых
компонентов освещена мало.
Горючие сланцы – твердое горючее ископаемое, мировые запасы
которого в пересчете на эквивалентное топливо в десятки раз превышают
ресурсы нефти и природного газа. Низкотемпературное газообразование за счет
углеродной составляющей горючих сланцев представляет интерес для
формирования пористой структуры при вспенивании стекломассы.
Цель работы – исследование влияния горючих сланцев на формирование
структуры и свойства пеностекла.
Для приготовления стекольной шихты использовали измельченный до
порошкообразного состояния бой тарного стекла. Для оптимизации
концентрации горючих сланцев в стекольной шихте исследованы сырьевые
массы с различным содержанием добавки. Для придания формовочной массе
пластичного состояния использовано жидкое стекло в количестве 40 %, которое
одновременно служит порообразующим компонентом.
Кратность уменьшения плотности рассчитывается путем деления
плотности до обжига на плотность образца в результате обжига (таблица 1).
Moderní vymoženosti vědy – 2017 • Díl 8
70
Проектирование стадиона предполагает, что он станет частью естественного
ландшафта. Архитекторами был учтён опыт проектирования лучших стадионов
и спортивных комплексов Европы и остального мира.
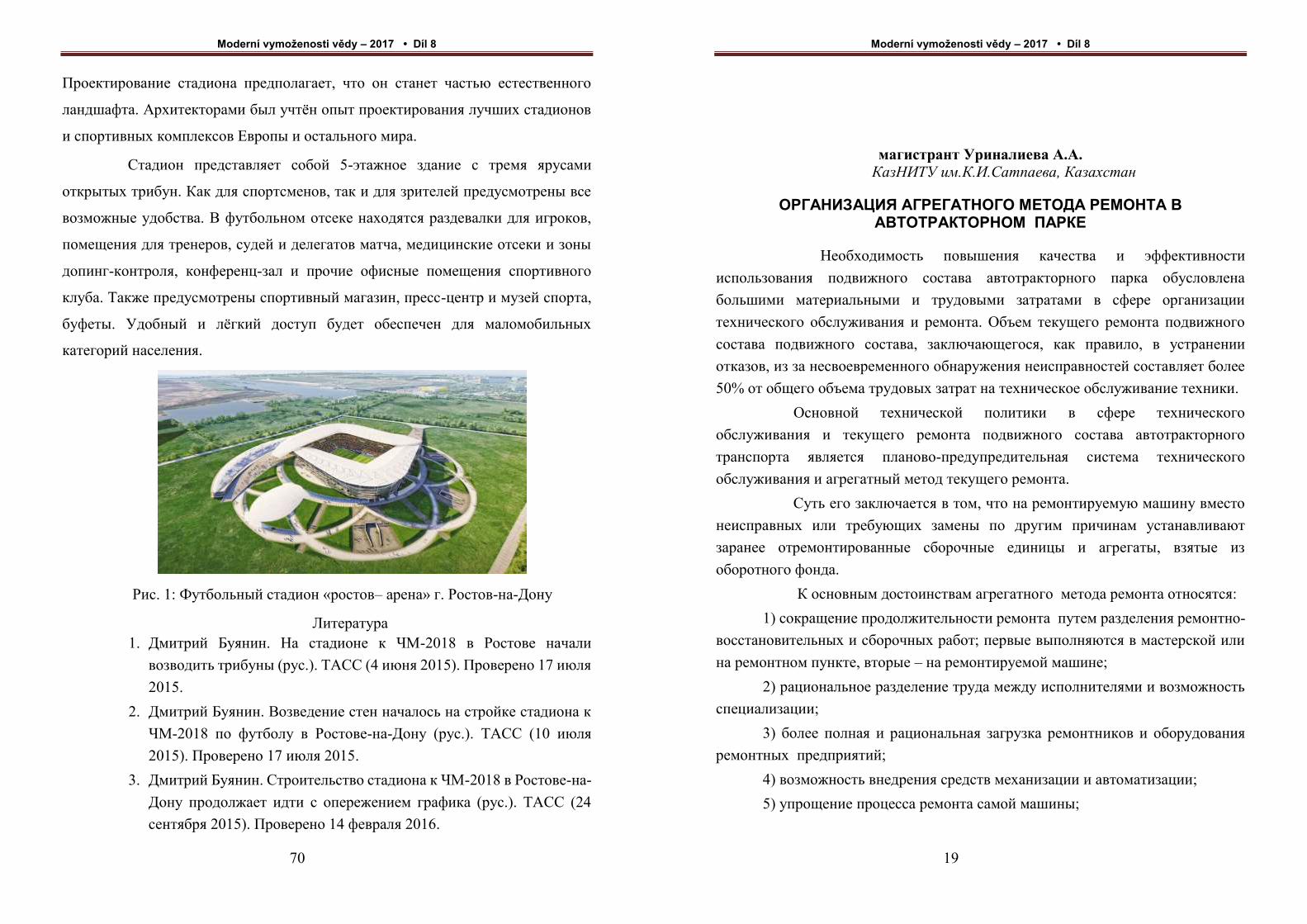
Стадион представляет собой 5-этажное здание с тремя ярусами
открытых трибун. Как для спортсменов, так и для зрителей предусмотрены все
возможные удобства. В футбольном отсеке находятся раздевалки для игроков,
помещения для тренеров, судей и делегатов матча, медицинские отсеки и зоны
допинг-контроля, конференц-зал и прочие офисные помещения спортивного
клуба. Также предусмотрены спортивный магазин, пресс-центр и музей спорта,
буфеты. Удобный и лёгкий доступ будет обеспечен для маломобильных
категорий населения.
Рис. 1: Футбольный стадион «ростов– арена» г. Ростов-на-Дону
Литeрaтyрa
1. Дмитрий Буянин. На стадионе к ЧМ-2018 в Ростове начали
возводить трибуны (рус.). ТАСС (4 июня 2015). Проверено 17 июля
2015.
2. Дмитрий Буянин. Возведение стен началось на стройке стадиона к
ЧМ-2018 по футболу в Ростове-на-Дону (рус.). ТАСС (10 июля
2015). Проверено 17 июля 2015.
3. Дмитрий Буянин. Строительство стадиона к ЧМ-2018 в Ростове-на-
Дону продолжает идти с опережением графика (рус.). ТАСС (24
сентября 2015). Проверено 14 февраля 2016.
Moderní vymoženosti vědy – 2017 • Díl 8
19
Уриналиева А.А. Организация агрегатного метода ремонта в автотракторном парке
магистрант Уриналиева А.А.
КазНИТУ им.К.И.Сатпаева, Казахстан
ОРГАНИЗАЦИЯ АГРЕГАТНОГО МЕТОДА РЕМОНТА В АВТОТРАКТОРНОМ ПАРКЕ
Необходимость повышения качества и эффективности
использования подвижного состава автотракторного парка обусловлена
большими материальными и трудовыми затратами в сфере организации
технического обслуживания и ремонта. Объем текущего ремонта подвижного
состава подвижного состава, заключающегося, как правило, в устранении
отказов, из за несвоевременного обнаружения неисправностей составляет более
50% от общего объема трудовых затрат на техническое обслуживание техники.
Основной технической политики в сфере технического
обслуживания и текущего ремонта подвижного состава автотракторного
транспорта является планово-предупредительная система технического
обслуживания и агрегатный метод текущего ремонта.
Суть его заключается в том, что на ремонтируемую машину вместо
неисправных или требующих замены по другим причинам устанавливают
заранее отремонтированные сборочные единицы и агрегаты, взятые из
оборотного фонда.
К основным достоинствам агрегатного метода ремонта относятся:
1) сокращение продолжительности ремонта путем разделения ремонтно-
восстановительных и сборочных работ; первые выполняются в мастерской или
на ремонтном пункте, вторые – на ремонтируемой машине;
2) рациональное разделение труда между исполнителями и возможность
специализации;
3) более полная и рациональная загрузка ремонтников и оборудования
ремонтных предприятий;
4) возможность внедрения средств механизации и автоматизации;
5) упрощение процесса ремонта самой машины;

Moderní vymoženosti vědy – 2017 • Díl 8
20
6) упрощение составления ремонтных нормативов и другой ремонтной
документации.
Агрегатный метод ремонта по сравнению с индивидуальным
позволяет в 2-3 раза сократить продолжительность пребывания в ремонте,
снизить стоимость и улучшить качество ремонта.
Необходимость внедрения агрегатного метода ремонта в
автотракторных парках обусловлена рядом причин: в сельском хозяйстве
эксплуатируется разнотипное и сложное самоходное оборудование, поэтому
ремонт сборочных единиц и агрегатов на месте в большинстве случаев
невозможен, так как для этого требуются: больше времени на ремонт,
высококвалифицированные ремонтники, специальная оснастка, испытательные
стенды; машины на полях, как правило, работают без резерва, поэтому только
быстрая замена агрегата или сборочной единицы вместо их ремонта на месте
ускоряет ввод машины в работу; из-за жесткого регламента ведения полевых
работ на техническое обслуживание и ремонт машин выделяется ограниченное
время.
Вот почему поддержание действующих технологических машин в
работоспособном состоянии возможно только с применением агрегатно-
узлового метода ремонта.
Успешному внедрению этого метода ремонта в автотранспорте
способствуют следующие обстоятельства: комплектовка большинства
самоходных машин быстросъемными сборочными единицами, блоками,
агрегатами; эксплуатация большого числа однотипных машин ; возможности
организации ремонта части съемных сборочных единиц и агрегатов в ремонтных
мастерских.
Эффективность внедрения агрегатного метода должна быть
обоснована технико-экономическим расчетом.
Внедрение агрегатного метода ремонта накладывает определенные
требования к конструкции машины и организации ремонтной службы в парке,
составлению ремонтной документации, обеспечению машин запасными
съемными элементами.
Основным условием для перевода основного технологического
оборудования на агрегатный метод ремонта является практическое расчленение
машины на взаимозаменяемые съемные агрегаты, сборочные единицы и детали.
Moderní vymoženosti vědy – 2017 • Díl 8
69
STAVEBNICTVÍ A ARCHITEKTURA
Urban design a krajinářské architektury Чан Куок Вьет Большепролетные светопрозрачные конструкции в архитектурном облике города Ростова- на- Дону XXI века
Чан Куок Вьет
БОЛЬШЕПРОЛЕТНЫЕ СВЕТОПРОЗРАЧНЫЕ КОНСТРУКЦИИ В АРХИТЕКТУРНОМ ОБЛИКЕ ГОРОДА РОСТОВА- НА- ДОНУ XXI ВЕКА
Большепролетные светопрозрачные конструкции становятся неотъемлемой
частью городской архитектуры ХХI века. Лучшие зодчие сегодня все чаще
создают удивительные комплексы зданий, центром притяжения в которых,
неким пространственным ядром, являются большие атриумные пространства –
объемные, наполненные светом и комфортом, хорошо защищенные от
негативных внешних воздействий и накрытые надежными светопрозрачными
покрытиями. Перспективным направлением применения светопрозрачных
покрытий, сегодня видится строительство крупных футбольных стадионов и
других большепролетных спортивных сооружений. С каждым годом спрос на
крытые спортивные стадионы в мире. В преддверии подготовки к футбольному
чемпионату 2018 года в Ростове-на-Дону возводится Ростов Арена.
По архитектурной задумке крыша стадиона представляет собой крылья,
развёрнутые в полёте под наклоном, которые накрывают собой трибуны,
охватывающие футбольное поле. Стремительность конструкционного образа
прекрасно вписывается в окружающее пространство. Стадион располагается на
искусственной насыпи на берегу Дона и обращен к нему северной открытой
стороной, позволяя зрителям любоваться красотами великой реки. Важно, что
учтен окружающий пейзаж.
Участок для застройки занимает площадь 37,6816 га. За транспортной
магистралью, расположенной с юга стадиона, располагается зона, которая в
перспективе будет застроена объектами водного гребного канала.
Moderní vymoženosti vědy – 2017 • Díl 8
68
Литература:
1. Aubin J.P. Cooperative fuzzy games // Mathematics of Operations
Research. 1981. No. 6. P. 1–13.
2. Owen G. Multilinear extensions of games // Management Sciences.
1972. Vol. 18. No. 5. P. 64- 79.
3. Meng F.Y., Zhang Q. The Shapley value on a kind of cooperative fuzzy
games // Journal of Computational Information Systems. 2011. Vol. 7.
No. 6. P. 1846–1854.
4. Tsurumi M., Tanino T., Inuiguchi M. A Shapley function on a class of
cooperative fuzzy games // European Journal of Operational Research.
2001. Vol. 129. No. 3. P. 596–618.
5. Mares M., Vlach M. Fuzzy Coalitional structures (alternatives) //
Mathware & Soft Computing. 2006. Vol. 13. P. 59-70.
6. Meng F.Y., Zhang Q., Cheng H. The Owen value for fuzzy games with
a coalition structure // International Journal of Fuzzy Systems. 2012. Vol.
14. No. 1. P. 22–34.
7. Billot A. Economic theory of fuzzy equilibria // Lecture Notes in
Economics and Mathematical Systems. 1992. Vol. 373.
Moderní vymoženosti vědy – 2017 • Díl 8
21
Расчленение машин имеет своей целью разработку такой
номенклатуры сменных элементов, которая обеспечила бы наиболее
экономичный путь восстановления работоспособности и ресурса машин в
эксплуатационных условиях. Следовательно, для каждой машины должна быть
сформирована оптимальная номенклатура заменяемых элементов.
Расчленяемые элементы машин должны обладать следующими
свойствами:
1) быть конструктивно законченными, автономными, т.е. легко
отделимыми от других частей машины без сложных разборочно-сборочных и
наладочных операций;
2) быть нетрудоемкими в демонтаже при отказе и монтаже на машину
вместо отказавшего элемента; быть транспортабельными и удобными для
хранения, т.е. допускать транспортирование без особой деформации, нарушения
регулировки, попадания пыли, влаги и т.п.; иметь допустимое для
транспортирования массу и габариты;
3) быть взаимозаменяемыми.
Кроме того, эти элементы должны допускать самостоятельный ремонт
на специализированных предприятиях и обеспечивать экономическую
целесообразность специализации их ремонта.
Расчленение машины должно производиться в три этапа.
На первом этапе формируется первоначальный проект номенклатуры
обменного фонда с учетом указанных выше требований, а также с условием, что
средние ресурсы сменных элементов не должны превышать соответствующих
показателей основных сборочных единиц и агрегатов.
На втором этапе производится уточнение номенклатуры обменного
фонда. Делается опись элементов, долговечность которых обеспечивает
безотказную работу машины за весь период эксплуатации. Затем номенклатура
обменного фонда уточняется путем сравнения оставшихся элементов по
критерию
pii TT 3 ,
где зiT -трудоемкость замены отказавшего i-го элемента с учетом
доставки

Moderní vymoženosti vědy – 2017 • Díl 8
22
к машине со склада; piT - трудоемкость ремонта i-того элемента на
машине.
На третьем этапе производиться окончательное формирование
номенклатуры обменного фонда и дается оценка экономической
целесообразности включения элементов в нее.
Оценка производиться по следующему критерию: если экономия
средств ∆Эi от включения i-го элемента в номенклатуру обменного фонда за весь
срок службы машины до списания ∆Эi > 0, то элемент включается, если ∆Эi < 0,
то не включается в номенклатуру обменного фонда.
Литература
1. Топилин Г.Е., Заброцкий В.М. Работоспособность тракторов. М.,
Колос, 1984
2. Волков Д.П., Николаев С.Н. Надежность строительных машин и
оборудования. М., Высшая школа, 1979
3. Пасечников Н.С. Научные основы методики оптимизации
технического обслуживания машин.Тр.ВИМ, т .85. М., 1979
4. 4.Рекомендации по организации технического обслуживания и
ремонта дорожных машин. М., Стройиздат 1978.
5. Локшин В.А. Эксплуатация. и техническое обслуживание
дорожных машин, автомобилей и тракторов –М.:
Машиностроение, 2006.
Moderní vymoženosti vědy – 2017 • Díl 8
67
семейство оптимальных структур содержит, по крайней мере, одну
структуру 2F*FC ;
существует взаимно однозначное соответствие между оптимальными
структурами 2F*FC и оптимальными решениями задачи
max)()(\2
NS
SSf , , (4)
где - допустимое множество системы (3).
Доказательство. (a) Рассмотрим произвольную оптимальную
структуру 1F*FC , не принадлежащую 2F . Согласно лемме 1 существует такая
структура 2F**FС , что )()( *** FСuFСu .
(b) Значение )(f целевой функции задачи (4) равно весу нечеткой
структуры 2F0
}{S
SSeFC
, соответствующей вектору . Пусть * -
множество оптимальных решений задачи (4). Учитывая лемму 2, получаем, что
каждому ** взаимооднозначно соответствует оптимальная структура
2F0
***}{S
SSeFC
.
Приведенный ниже пример показывает, что, при сделанных
предположениях, существуют игры, в которых вес нечеткой структуры больше,
чем вес любой четкой структуры и больше веса максимальной коалиции.
Пример 2. Дана игра ),( vN , где N={1,2,3,4},
6)3,1()2,1( vv , 9)4,3()4,2()4,1( vvv , 12)3,2,1( v , 15)( Nv ,
0)( Sv для остальных nS }1,0{ . Все четкие коалиционные структуры
(15 структур для игры 4 лиц) имеют вес, не превосходящий )(Nv . Задача (4)
имеет единственное оптимальное решение: 3
1*}4,3{
*}4,2{
*}4,1{ ,
3
2*}3,2,1{ ,
0* S для остальных nS }1,0{ , которое определяет нечеткую структуру
)}0,,,(),,,0,0,0(),,0,0,,0(),,0,0,0,{(3
2
3
2
3
2
3
1
3
1
3
1
3
1
3
1
3
1* FC
с весом 15)(17)( * NvFCu .

Moderní vymoženosti vědy – 2017 • Díl 8
66
полученное из FС удалением j
FC , p
FC
и добавлением коалиции
),...,( 1rn
rr FCFCFC , где pi
ji
ri FCFCFC , Ni . Очевидно, что
pjr FCsuppFCsuppsuppFC и
rsuppFCpj
r eFC )( . Значит, 1FFC и
|||| FCFC . Из (1) следует, что )()( FCuFCu . Повторяя аналогичные
преобразования, мы построим необходимую для завершения доказательства
структуру, принадлежащую 2F .
Покажем, что существует связь между нечеткими структурами,
удовлетворяющими (2), и решениями линейной системы с n уравнениями и
)12( n неизвестными.
Лемма 2. Существует взаимно однозначное соответствие между
2FFC и допустимыми решениями системы
1,\2
SiS
SN
, Ni , 12
\2)(
n
N RSS . (3)
Доказательство. Пусть - допустимое множество системы (3).
Каждый вектор однозначно определяет нечеткую структуру
1F0
}{S
SSeFC
, удовлетворяющую (2). Обратно, пусть 2FFC . Тогда
}...,,{1
1
msuppFCm
suppFC eeFC , 11
m
kk , ]1,0(k . Вектору ),...,( 1 m
соответствует единственный неотрицательный вектор 12
\2)(
n
N RSS ,
где
.яхслучаостальныхв,0
,,, FCFCsuppFCS kkk
S
Из 11
m
kk следует, что 1
,\2
SiS
SN
, т.е. .
Доказанные леммы позволяют свести проблему нахождения
оптимальной нечеткой структуры к задаче линейного программирования.
Теорема 1. Пусть ),( N - четкая игра, соответствующая нечеткой
игре ),( uN , удовлетворяющей (1). Тогда:
Moderní vymoženosti vědy – 2017 • Díl 8
23
Cherepakha A. , Kopytkov D. The model development to create the virtual cargo delivery routes in the service region
Assoc. Prof., Ph. D., A. Cherepakha, Assoc. Prof., Ph. D., D. Kopytkov
Kharkov National Automobile and Highway University
THE MODEL DEVELOPMENT TO CREATE THE VIRTUAL CARGO DELIVERY ROUTES IN THE SERVICE REGION
The process to create the routes for delivery of consumer goods is carried out
by a transport service enterprise during its operation under conditions of stochastic
transport market macro system.
In the model of the route formation it is supposed to allocate the parameters of
transport services demand as input parameters, the random effects of the environment
are offered to be taken into account by simulation of the random variables of the
delivery process technical and operational parameters [1, 2], but the result of the
process are suggested to evaluate on the service quality indicators (Figure 1).
Figure 1 – Cybernetic model to create the delivery routes of consumer goods
The cargo owners are the demand generating subjects of the consumer goods
market. Transport service customer when applying a request specifies the source and
destination of the goods, in this case, any of the cargo owners can act both as a shipper
and as a consignee. A number of shippers SFO can be defined as a set of the following
objects
1 2{ , , ..., }FOFO NS FO FO FO , (1)
where FO1, FO2, …, FONFO – cargo owners functioning in the transport market
of consumer goods in the region;
Moderní vymoženosti vědy – 2017 • Díl 8
24
NFO – number of cargo owners in the transport market.
The single cargo owner in the transport market model should be characterized
by the location parameters [3] and by the request flow to describe its demand [4]
{ , }FO FOFO L D , (2)
where LFO – cargo owner location characteristics;
DFO – request flow characteristics to describe the cargo delivery demand.
Characteristics of the cargo owners geographical location is determined by the
coordinates with taking into account the scale [3]. However, if there are some
assumptions about the size of the grid for the service region, characteristic of the
geographic location can be estimated by the number of the square [3]. For example, in
paper [6] in order to describe the geographical location the Location class has been
proposed to use. The Location class contains the x and y fields giving the coordinates
of the subject on a square grid, the size of which is specified in the areaSize entry.
Associating with the real geographical areas is done in the class with the help
of the city and region string fields, containing the name of the locality and the name of
the region, respectively. By default, the name of the region is defined as the number of
the cell in the grid. To access the value of this entry the Area property is used that is of
only the accessory reader and is determined via x, y and the areaSize. Thus, in
accordance with the approach [4] to describe the cargo owner geographical location is
sufficient to specify the following set of parameters
р{ , , }FOL x y N , (3)
where x, y – cargo owner grid coordinates in the Cartesian system;
Nр – geographic specification level.
The article [3] states that the most important parameter of the transport market
model is the geographic specification level Nр. At the same time the geographic
specification level refers to the size of a square grid that defines the cargo owner
coordinates (the areaSize field in the Location class). The coordinates are determined
in accordance with the principle illustrated in Figure 2 (option for Nр = 4). The cargo
owner location is
Moderní vymoženosti vědy – 2017 • Díl 8
65
Как отмечено в [7], «... ничто не дает нам повода для экономического
объяснения, почему агенты имеют различные уровни принадлежности
коалиции». Иногда разная "временная" степень участия агентов в одной и той же
коалиции может привести к распаду коалиции.
Предположим также, что
)()( kk
k suppFCvFCu , 1FFCFC k , ]1,0(k , (1)
где ),( N - четкая игра, соответствующая нечеткой игре ),( uN , т.е.
)()( SeuSv для всех непустых четких коалиций nS }1,0{ . Условию (1)
удовлетворяют, например: депозитные игры, в которых ставки по вкладам
зависят от срока вклада, но не зависят от величины вклада; частные классы игр
коллективного страхования.
Согласно определению нечеткой структуры, количество структур FFC
бесконечно и каждая структура может содержать компоненты с одинаковыми
носителями. Определим на множестве 1F бинарное отношение
1F )(,)( FСFС : )()( FСFС ))(())(( FСuFСu ,
которое рефлексивно, транзитивно и симметрично, т.е. разбивает 1F на
классы эквивалентности. Покажем, что каждый класс содержит структуру FС ,
все компоненты которой имеют разные носители
pj suppFCsuppFC ; FCFCFC pj , ; pj . (2)
Подмножество структур из 1F , удовлетворяющих (2), обозначим через 2F
.
Лемма 1. Пусть ),( uN - нечеткая игра, удовлетворяющая (1), и 1FFС .
Тогда существует такая структура 2FFС , что )()( FCuFCu .
Доказательство. Если 2FFС , то доказательство закончено. В
противном случае, для некоторой пары структурных компонент FCFCFCpj,
, pj , справедливо равенство pj
FCsuppFCsupp . Из 1FFС следует, что
jFCsupp
j
jeFC и
pFCsupp
p
peFC . Рассмотрим семейство коалиций
rpjFCFCFCFCFC )\)\(( ,

Moderní vymoženosti vědy – 2017 • Díl 8
64
mk ,1 , удовлетворяющее условию 1FCFC
ki
k
FC , Ni , т.е. компоненты
структуры FC могут пересекаться и суммарная интенсивность участия каждого
игрока во всех компонентах структуры равна 1. Множество всех таких структур
обозначим через F . Вес структуры FFC равен сумме весов ее компонент
)()(
FСFC
k
k
FCuFCu , FFC .
Структуру FFC , все компоненты которой – четкие коалиции, будем
называть четкой структурой.
Существует также другое определение нечеткой структуры,
использованное при обобщении эффективных коалиционных значений.
Нечеткой коалиционной структурой },...,{ 1 mBBB в [6] названо разбиение
нечеткой коалиции FFS , т.е. FSBBB kn
kk },...,{ 1 , mk ,1 , FSBsupp kmk 1
и pj suppBsuppB для всех BBB pj , ; pj . Включение FSBk
означает, что iki FSB или 0kiB для всех Ni .
Если структура FC не сформировалась до начала игры, то желательно
найти наиболее выгодную (оптимальную) структуру, т.е. структуру с
максимальным весом
FСFC
k
FCFC k
FCuFCu )(max)(maxFF
.
Из примера 1 видно, что различные представления нечеткой игры с
помощью известной четкой игры могут сильно отличаться и неизвестно, какое
из них лучше. Поэтому представляют интерес нечеткие игры, однозначно
определенные четкой игрой, а также алгоритмы вычисления их решений.
Предположим, что отличные от нуля доли участия игроков в каждой
компоненте kFC структуры FC одинаковы, т.е.
,,0
,,
k
kkk
isuppFCi
suppFCiFC
FFCFC k , ]1,0(k .
Множество всех таких структур обозначим через 1F . Любую
коалиционную структуру 1FFC можно записать в виде
}...,,{1
1
msuppFCm
suppFC eeFC .
Moderní vymoženosti vědy – 2017 • Díl 8
25
Figure 1 – Service region zoning based on the geographic specification level
This approach to the cargo owner geographical location is sufficient to describe
a pair of parameters
р{ , }FOL k N , (4)
where k – number of geographical segment of the territory, on which the cargo
owner is located.
It should be noted that the approach (4) is only justified in the case of a square
grid.
These approaches to the characterization of the geographical segments are
interchangeable. Thus, geographical segment number can be determined from a set of
parameters (3) as follows
рk x y N . (5)
Conversely, the x and y coordinates are determined from the set of parameters
(4) in the formulas
р
ky
N
, (6)

Moderní vymoženosti vědy – 2017 • Díl 8
26
р
р
kx k N
N
, (7)
where a – integer part of a.
Since (3) and (4) are interchangeable, then, resulting from the principle of
minimizing the number of parameters of interest, the preferred approach is to determine
the characteristics of the cargo owners' geographical location from a pair of the set of
parameters р{ , }FOL k N .
In general, for a time horizon the demand for cargo transport services is a set
of requests
1 2{ , , ..., }RFO ND r r r , (8)
where r1, r2, …, rNR – cargo owner requests for transport services;
NR – number of requests submitted during the period under consideration.
The single request flow describing the demand for delivery of consumer goods
[5] should be found from the set of random variables, which are the parameters of
single transportation requests. At the same time as the main parameters of the cargo
lot, the delivery distance and the request interval were considered [4, 5]. The study [6]
was done to outline a zero mileage as a request flow characteristic.
If there are a number of the cargo owners SFO, thus, there are the geographic
location characteristics of each cargo owner, provided that the transport network
misalignment ratio close to 1, the delivery distance can be determined from the
consignor and consignee geographical location parameters. So, in presence of LFO it is
inappropriate to consider the distance delivery as the request flow parameter. As a
necessary characteristic of the delivery request is an indication of the consignor FOS
and consignee FOO, where S FOFO S , O FOFO S and S OFO FO , the distance of
delivery can be estimated as follows
22 )()(OSOSryyxxl
, (9)
,
Moderní vymoženosti vědy – 2017 • Díl 8
63
1. Мультилинейным расширением [2] (multilinear extension) четкой
игры ),( N называется нечеткая игра ),( vmеN , где
)())1(()(\
SvFSFSFSmеsuppFSS SNi
iSi
i
, nFS ]1,0[ .
2. Мультилинейной формой [3] (multilinear form) четкой игры
),( N называется нечеткая игра ),( vmfN , где
),()(),(
),()(),()(
suppFSvFSusuppFSv
suppFSvFSuFSuFSmfv
)()()( SvFSFSusuppFSS Si
i
, nFS ]1,0[ .
3. Интегральной формой [4] (Choquet integral form) четкой игры
),( N называется нечеткая игра ),( vifN , где
)(
11))(]([)(
FSq
lllhv hhFSvFSif
l, nFS ]1,0[ ,
|)(|)( FSQFSq , },0|{)( NiFSFSFSQ ii ,
элементы )(FSQ упорядочены по неубыванию и обозначены через lh :
)(21 ... FSqhhh , 00 h ,
}|{][ lih hFSsuppFSiFSl
, )(,...,1 FSql .
4. Каноническим представлением [5] игры ),( vN называется
нечеткая игра ),( vkN , где
},1|)({)(\2\2\212
FSеSνмахFSkNNNn
S
SS
S
S
S
S
R
v
, nFS ]1,0[ .
Пример 1. Пусть {1,2,3}N и известна характеристическая
функция четкой игры
3)1( v , 5)2( v , 2)3( v , 10)2,1( v , 8)3,1( v , 12)3,2( v , 18)( Nv ,
Для нечеткой коалиции )8.0,3.0,5.0(FS с носителем }3,2,1{suppFS
получаем: 06.7)( FSmе , 34.14)( FSv
mf , 6.7)( FSifv и 7)( FSkv .
Нечеткой коалиционной структурой [5] называется конечное
семейство }...,,,{ 21 mFCFCFCFC нечетких коалиций ),...,( 1kn
kk FCFCFC ,

Moderní vymoženosti vědy – 2017 • Díl 8
62
Зинченко А.Б., Королевская Е.Л. Оптимальные коалиционные структуры для частного класса нечетких игр
К.ф.-м.н. Зинченко А.Б., Королевская Е.Л.
Южный федеральный университет. Россия
ОПТИМАЛЬНЫЕ КОАЛИЦИОННЫЕ СТРУКТУРЫ ДЛЯ
ЧАСТНОГО КЛАССА НЕЧЕТКИХ ИГР
Традиционные модели формирования коалиций разработаны для
детерминированной среды. Но в реальной жизни решения часто принимаются в
условиях неопределенности. Поэтому, для подстраховки от крупных потерь,
агенты иногда не вкладывают все имеющиеся средства или ресурсы в один
проект, а распределяют их между несколькими проектами.
Нечеткой коалицией называется вектор FS ),...,( 1 nFSFS , где FSi [0,1] -
степень участия игрока i в коалиции FS. Величина iFS может быть равной доли
времени, которую игрок i готов выделить для участия в коалиции FS, или частью
ресурсов, которыми владеет игрок i. Множество }0|{ iFSNisuppFS
называется носителем нечеткой коалиции FS. Если все компоненты вектора FS
целые FSi{0,1}, то нечеткая коалиция FS является характеристическим
вектором четкой коалиции suppFSeFS . Нечеткие коалиции соответствуют
точкам n -мерного единичного гиперкуба n]1,0[ , а четкие коалиции - вершинам
куба.
Нечеткой кооперативной игрой [1] называется пара ),( uN , где
Ru n]1,0[: - характеристическая функция, которая каждой нечеткой
коалиции FS ставит в соответствие вещественное число )(FSu и удовлетворяет
условию 0)( FSu , если nRFS )0,...,0( .
Характеристическую функцию нечеткой игры ),( uN обычно трудно
описать явно, но можно вычислить ее значения для четких коалиций. В этом
случае нечеткую игру определяют с помощью соответствующей четкой игры
),( N , где Rv n}1,0{: . Рассмотрим некоторые из существующих подходов к
решению этой проблемы.
Moderní vymoženosti vědy – 2017 • Díl 8
27
where xS, yS и xO, yO – consignor's and consignee's coordinates, respectively.
Obviously, the larger the value Nр and the closer the value of the transport
network misalignment factor to 1 (this assumption is usually true in large cities), the
formula (9) is more accurate.
The specifics of the consumer goods transportation is expressed in respect of
cargo owners’ needs to fulfill the delivery time. Therefore, one of the main
characteristics of the consumer goods delivery request is the shipment time expected
by the consignee. If it is possible to estimate the request processing duration, then as
the request characteristics an allowable service waiting time can be taken, wherein
destwttt , (10)
where estt – consignee-expected shipment time, hours;
dt – actual duration of the transport service request, hours.
Thus, the consumer goods transportation request is minimally described by a
set of the following parameters
wrtrOSttqFOFOr ,,,, , (11)
where rtt – request reception time, hours;
rq – cargo amount specified in the request, tons.
Except the above-stated parameters, the delivery requests have other
characteristics. However, within the routing task the set (11) is sufficient.
Transport service demand DFF should be determined as a summation of cargo
owners' needs
1
FON
FF FOi
i
D D
. (12)
In the mathematical model to form the consumer goods delivery routes the
transport service demand is the incoming parameter and is described by a set of
characteristics
Moderní vymoženosti vědy – 2017 • Díl 8
28
LTIQDwFF
~,
~,
~,
~ , (13)
where Q , I , wT~
and L – random variables of the cargo amount, request
reception interval, critical waiting time for the request service and delivery distance for
the incoming flow of requests.
As criterions to take into account the impact of the environment on the delivery
routes formation process, in the model it is proposed to consider the main technical and
operational parameters as random variables – the 1 ton loading and unloading time 1тT
, and the average road speed тV on the network.
The process of forming the delivery route is considered as the aggregation of
the incoming requests to the current point in the group so as to meet the cargo owners’
requirements from one side, and to provide the most effective option service of the
incoming request flow – from the other side.
In this context, the delivery route ρ can be mathematically defined as the set of
requests, the satisfaction of which is provided by one vehicle during a carrying cycle
ρ(1) (2) ( )ρ { , , ..., }Nr r r , (14)
where r(1), r(1), …, r(Nρ) – cargo owners’ requests to be serviced in the route
delivery process;
Nρ – number of the requests served by one vehicle per ride.
The processing quality of the delivery request flow is determined by trouble-
free operation of the hauler and can be estimated as the "number of the requests served-
to-the total number of the requests received" ratio
n
nR serv. , (15)
where R – cargo owners service level;
nserv. – number of the requests serviced;
nΣ – total number of the requests in the flow.
Moderní vymoženosti vědy – 2017 • Díl 8
61
3) Оқушылар әнгімелесу кезіндегі әлеуметтік ортасы жағдайында
жетіледі. Осы зияткерлік жаттығу кезінде оқушылар ой-пайымдарының негізін
құрып, мәнін ұғады.
3)Топтық жұмысты ұйымдастыру арқылы (Диалог барысында оқушылар
(сонымен қатар олардың мұғалімдері) келісілген нәтижеге қол жеткізу үшін күш
жігерін жұмсайтын , білімді бірлесіп алу немесе пікір алмасу барысында тең
құқылы серіктестер болып табылады. Пікір алмасу оқушылармен диалог құру
арқылы іске асады, дегенмен оны оқушылар бірлескен зерттеу барысында да
анықтай алады
Пайдаланылған әдебиеттер:
1. Мұғалімдерге арналған нұсқаулық І деңгей
2. Портал материалдары
3. К. Дайрабаев, А. Дайрабаева Педагогика негіздері
4. Жас ерекшелік психологиясы Аманова Алматы 2011 39-42 б
5. Интербелсенді әдістемені ЖОО-да қолдану мәселелері А.Әлімов
Алматы 2013
6. Мирсеитова С.Сын тұрғысынан ойлау технологиясы.-1998

Moderní vymoženosti vědy – 2017 • Díl 8
60
Төртінші кезең – тапсырмалар бөлістіріледі, тәрбиеленушілердің
баршасын түгелдей қамтыған жеке – дара, топтық, ұжымдық іс – шаралар
жүктеме ретінде тапсырылады.
Бесінші кезең – тәрбиеленушілердің бәрі өз борышына алған
шығармашыл жұмыстарды дайындауға кіріседі.
Алтыншы кезең – дайындалған тәрбиелік шығармашыл іс өткізіледі.
Жетінші кезең – тәрбиелік іс – шара өткізілгеннен соң ынталы топ және
ұжым мүшелерінің қатысуымен көзделген бағдарламаның орындалуына
ұжымдық талдау беріледі, сапасы бағаланады.
Топтық жұмыстарда әр топ басшылары өз топ мүшелеріне міндеттерін
белгілетіп, қабілеті төмен оқушының көшбасшы оқушыға ұмтылғандығы,
ілескісі келетіндігін байқадым. Осындай тапсырмалар оқушының
қызығушылығын, белсенділігін арттыратыны сөзсіз. Оқушылардың сабақты
талқылағаннан байқағаным, топ басшысы оқушыларға атқаратын міндеттерін
бөліп, әр оқушының не нәрсеге жауапты екенін белгілеп отырды. Оқушылар
өзара бір-бірімен келісіп әр топтың жұмысына түрлі бағалаулар беріп
отырды.Постермен жұмыс жасағанда оқушылардың шығармашылығы артқанын
аңғардым, алғашқыда бұл жұмысты білмейтін болатын, кейін бұл әдіс
оқушыларға ұнағандарын айтты. Әдеттегідей үндемей отырған оқушы, өзіне
берілген жауапкершілікті сезінді. Оқушылардың тәрбие сабаққа деген ынтасы,
қызығушылығы, балалардың көп ізденетініне көзім жетті. Рөлдік ойын арқылы
оқушылардың сыни ойлайтынын байқадым, өйткені сыни ойлайтын оқушы
жағдаятты сұрақты шеше алады. Осындай рөлдік ойындар арқылы оқушының
қызығушылығы артады, өзіне сенімі молаяды, сол жағдаяттан шешу жолын таба
алады. Ұлы неміс педагогы А.Дистервергтің «Жаман мұғалім ақиқатты өзі айтып
береді, ал жақсы мұғалім оқушының өзін ізденуге жетелейді, ойға үйретеді»
дегені мәлім. Мұғалім бұл жағдайларда танымдық іс-әрекетті ұйымдастыратын
ұжымдық істердің ұйтқысы болатындықтан, оқушының шығармашылығын
арттырады.
Мектептегі іс-әрекеттегі зерттеу жұмысымда қол жеткізген нәтижелерім.
1) Оқушылар топтық жұмыстар жасай отырып, бірі-білмегенді
екіншісінен үйреніп, жақын арадағы даму аймағы орнатылады
2) Тапсырмаларды орындау үшін құрдастардың белсенді қатысып,
ақпараттарды өңдеуі және қорытуын талап етеді.
Moderní vymoženosti vědy – 2017 • Díl 8
29
For the set of the routes obtained the number of the requests serviced can be
calculated as the sum of capacities of all the sets ρ
Nr
iiserv
Mn1
.)( , (16)
where )(i
M – set capacity (number of elements);
Nr – number of the delivery routes obtained.
Accordingly, the total number of the requests in the flow can be found as the
sum of the set capacities DFO that designates the cargo owners’ demand for the time
range
1
( )FO
i
N
FO
i
n M D
. (17)
Thus, the task to obtain the delivery routes for the consumer goods can be
formulated as a determination, in the course of client servicing, of such set of the routes
Sρ, for which the value of cargo owners’ service level is optimal
ρ( ) 1R S . (18)
The following restrictions must be taken into account when solving the above-
stated problem: a) request service time limitation: for the requests aggregated into the
route the time interval of their income should not exceed the allowable waiting time
for the request received earlier; b) delivery route efficiency limitation: exceeding the
dynamic load factor for a set of requests aggregated into the route over the minimum
acceptable dynamic load factor (this value is determined by the ratio of market price to
the transport service cost); c) cargo amount limitation: there are vehicles used for the
delivery, which are of a carrying capacity value that is not less than the maximum
possible value of the cargo lot; if the cargo amount exceeds the carrying capacity, such
lot is considered as two or more lots with an cargo amount not exceeding the vehicle
carrying capacity.

Moderní vymoženosti vědy – 2017 • Díl 8
30
In solving the problem (18) it is proposed to use the following assumptions to
the correctness of the mathematical statement: the transport network density for a large
city is so high that the misalignment factor is close to 1; a set of shippers is final and
cannot be changed during the simulation period: the situation of new customers in the
region as well as their disappearance (company dissolution) is not considered; the
model presented assumes that the vehicles are of the same body type (vans) used to
carry the consumer goods; if the vehicles of different types of body are required when
generating the routes it is necessary to consider the flow of requests for the appropriate
nature of goods.
REFERENCES
1. Кельтон В. Имитационное моделирование: Пер. с англ. /
В. Кельтон, А. Лоу. – СПб. : Питер, 2004. – 847 с.
2. Наумов В. С. Развитие научно-технологических основ
экспедиторского обслуживания на автомобильном транспорте: дис.
… доктора техн. наук: 05.22.01 / Наумов Виталий Сергеевич. –
Харьков, 2013. – 352 с.
3. Наумов В. С. Повышение эффективности информационных систем
управления процессами транспортно-экспедиторского
обслуживания / В. С. Наумов, О. А. Скорик, А. А. Васютина //
Вісник Севастопольського нац. техн. ун-ту: Зб. наук. пр. –2013. –
Вип. 143. – С. 211 – 214.
4. Нефедов Н. А. Относительная эффективность развозочных
маршрутов / Н. А. Нефедов // Автомоб. трансп.: Сб. науч. тр. – 2002.
– Вып. 10 – С. 82 – 84.
5. Naumov V. An approach to modeling of demand on freight forwarding
services / V. Naumov, Ie. Nagornyi // Trip Modelling and Demand
Forecasting. – Kraków, 2014. – Vol. 1(103). – P. 267 – 277.
6. Наумов В. С. Развитие научно-технологических основ
экспедиторского обслуживания на автомобильном транспорте: дис.
… доктора техн. наук: 05.22.01 / Наумов Виталий Сергеевич. –
Харьков, 2013. – 352 с.
Moderní vymoženosti vědy – 2017 • Díl 8
59
көзқарастарды тыңдап, өз идеяларын айтуға мәжбүр болады. Осылайша
ынтымақтастық оқу жағдайында оқушылар құрбы-құрдастарымен қарым-
қатынас жасауға, идеяларды ұсынуға және қорғауға, әртүрлі ұстанымдармен
алмасуға, басқа тұжырымдамаларға күмәнмен қарауға және оған белсенді
қатысуға мүмкіндік алады.
Мерсер мен Литлтонның (2007) еңбектерінде көрсетуінше диалог
сабақта оқушылардың қызығушылықтарын арттырумен қатар олардың білім
деңгейінің өсуіне үлес қосатындығын атап көрсеткен. Жалпы айтқанда
диалогтік оқыту – тәрбие процесін тиімді етудің бір әдісі. Өйткені, диалогтік
оқыту балалардың сөйлеу дағдыларын қалыптастыруда орны ерекше. Тәрбие
сабақтарында оқушыларға сұрақ қойғанда, оқушының ойына түрткі болатындай
сұрақтарда болды. Сабақты жоспарлауда берілген тапсырмалар топтық жұмысты
қамтуға көбірек пайдалануға тырыстым және оның тиімділігіне тәжірибе
жүргізуде айқындалды. Қазіргі білім беру тұжырымдамасының талабында
мұғалім мен оқушының қарым-қатынасы жаңа болмыстық мазмұнда өзгеріп,
мұғалім – ұйымдастырушы, бағыттаушы, оқушы – ізденуші, белсенді болуы
керек. Оқушының өз бетімен білім алуының бір түрі – шығармашылық
тапсырмалар орындау арқылы білім алу. Оқушыларға өз бетімен жұмыстар
орнату арқылы шығармашылықпен білім алуға қол жеткізуге болады.Өзіндік
жұмыстарда :
-Оқушының шығармашылық қабілеті дамиды;
-Ізденушілік қабілеті артады;
-жауапкершілігі жоғарлайды;
-Ақпаратты бағдарлау біліктілігі қалыптасады;
-Сыни тұрғыдан ойлау қабілеті артады.
Топтық жұмыстың кезеңдері:
Бірінші кезең – уақытша ынталы топ құрылады. Ол алдағы жұмыстарды
жоспарлайды.
Екінші кезең – басқарушы топ алдағы жұмыстардың бағыттарын
белгілейді, қатысушылар өз ұсыныстарын береді, ұсыныстар талданады, ниетке
алынған істердің жалпы бағдарламасы пайда болады.
Үшінші кезең – ойға алынған істердің орындалуына қажет дайындық
жұмыстарының, құрал – жабдықтардың, материалдардың тізімі жасалады.

Moderní vymoženosti vědy – 2017 • Díl 8
58
Адам тағдырына немқұрайлы қарамау керек. Оқушының жеке тұлға
болып қалыптасу үшін мұғалімнің қателесуіне жол жоқ. Мұғалім білім беріп,
ұрпақ тәрбилеуде негізгі тұлға, олай болса оқушыға берілетін білімді нәтижелі,
жүйелі түрде жеткізіп қателеспей оқыту міндетін, парызың. Тәрбие сабағымда
психологиялық ахуал туғызғаным оқушылардың көңіл күйлерін көтеріп тастады.
Жақсы көңіл күй адамның табысты жұмыс жасауына оң әсерін тигізеді.
Жағымды көтеріңкі көңіл-күймен оқушылар сабақ барысында ынтымақтастықта
жұмыс жасай отырып, тапсырмаларды белсенділікпен орындап, бір-бірімен
пікірталастыра отырып пікір алмасты. Топпен жұмыс жасағанда тәрбие сабағын
өкізуде түрлендіріп, топты алмастырып , оқушылардың түгел қамтылуын ,
сабақтан тыс қалмауын қадағалау. Оқушы нені ойлау керектігін ұғынуын,
топтық жұмысты ұйымдастырғанда, олардың бірлесе жұмыс істеуіне мүмкіндік
жасау.
Іс-әрекеттегі зерттеу жұмысымның тақырыбы: «Тәрбие сабағында
диалогтік әдісті пайдалану .» Зерттеудің негізгі мақсаты: Оқушылардың топта
жұмыс жасау дағдыларын қалыптастыру. Топтық жұмысты ұйымдастыра
отырып қызығушылығын арттыру арқылы, әлеуметтік ортаға бейімдеу.
Зертеудің нысаны –топтық жұмысты ұйымдастыру арқылы оқушының жеке
тұлғасын қалыптастыру, шығармашылық ойлауын дамыту, ізденуге деген
қызығушылығын арттыру. Зерттеу жұмысының міндеттері: - оқушылардың
топтық жұмыс жасау дағдыларын қалыптастыру. Тәрбие сабақтарында жаңа
технологияларды (СТО, эссе жазу, АКТ мүмкіншілігін) пайдалану арқылы
оқушыларды сыни тұрғыдан ойлануға дағдыландыру. Зерттеу сұрақтары:
Топтық жұмысты ұйымдастыру арқылы, оқушылардың тәрбиенің әр
бағыттағы сұрақтарына деген қызығушылығын арттыру жолдарын қарастыру;
Тәрбиедегі кедергілерді қалай анықтауға және шешу жолдарын
табуға болады?
Іс-әрекеттегі зерттеудің бір маңызды ерекшелігі – оны іс-әрекетке
қатысты оқытушылар немесе оқушыларды зерттейтін сырттан келген зерттеу
тобы емес, сол ұйымдағы не қоғамдағы мүше немесе сол ұжымның өзге
мүшелерінің қатысуымен жүзеге асырылатынында.
Зерттеу барысында көптеген отандық және шетелдік ғалымдардың
еңбектерін негізге алдым. Тәрбиелеудің ынтымақтастық ортасында оқушылар
әлеуметтік және эмоциональдық тұрғыдан да дами түседі,өйткені олар түрлі
Moderní vymoženosti vědy – 2017 • Díl 8
31
Inženýrů elektrotechniky a elektroniky Микаева С.А., Микаева А.С. Ультрафиолетовое обеззараживание
Д.т.н., зав. кафедрой Микаева С.А.
ФГБОУ ВО «Московский технологический университет» (МИРЭА),
Россия
К. э. н. Микаева А.С.
ФГБОУ ВО «Московский технологический университет» (МИРЭА),
Россия
УЛЬТРАФИОЛЕТОВОЕ ОБЕЗЗАРАЖИВАНИЕ
С ростом численности населения Земли и загрязнения окружающей
среды, чистый воздух, поверхности и вода становятся дефицитом.
Бактериологическое загрязнение питьевых вод, рек и морей, а также воздуха –
несет угрозу здоровью человека и окружающей среды. В настоящее время
уделяется большое внимание исследованиям в области эффективного и
безопасного обеззараживания воды и воздуха [1-3]. Также изучаются новые
сферы применения ультрафиолета (УФ) [4].
В УФ системах источником УФ является амальгамная лампа. Именно
современные амальгамные лампы позволяют обеспечить высокую
эффективность и безопасность обеззараживания. Основная задача – это создать
лучшее решение для людей и экологии.
Бактерицидное УФ излучение широко применяется для обеззараживания
воздуха и поверхностей вот уже более 60 лет. УФ излучение способно проникать
сквозь биопленку образующуюся бактериями на различных поверхностях
(металл, пластик, дерево, резина, вода) в отличие от многих химических
дезинфектантов.
УФ излучение – это физический метод обеззараживания, основанный на
фотохимических реакциях, которые приводят к необратимым повреждениям
ДНК и РНК микроорганизмов. В результате микроорганизм теряет способность
к размножению (инактивируется) и, таким образом, теряет свои патогенные
свойства.
Максимальный обеззараживающий эффект УФ излучения наблюдается в
интервале длин волн от 205 до 280 нм. Волны этого диапазона хорошо
Moderní vymoženosti vědy – 2017 • Díl 8
32
поглощаются молекулами ДНК и РНК. Именно на этот участок спектра
приходится длина волны, генерируемая бактерицидными УФ лампами низкого
давления – 254 нм, что практически совпадает с пиком кривой бактерицидной
эффективности.
Преимущества УФ обеззараживания: высокая эффективность в
отношении широкого спектра микроорганизмов: бактерий, вирусов, спор и
паразитарных простейших, в том числе устойчивых к химическим
дезинфектантам. Экологическая безопасность: обеззараживание без влияния на
физико-химические и органолептические свойства воздуха, без использования
химикатов и обеззараживания вредных побочных эффектов, опасных для
здоровья и окружающей среды. Высокая скорость обеззараживания: УФ
действует мгновенно. Экономичность и энергоэффективность: небольшие
затраты на расходные материалы (лампы).
В настоящее время бактерицидные лампы используются в борьбе с
патогенными микроорганизмами во всех направлениях и объектах массового
скопления людей. Новое поколение УФ источников – амальгамные лампы.
Созданы амальгамные лампы с мощностью от 15 Вт до 1 кВт, с КПД 40% и
ресурсом до 16 000 часов (до 2-х лет непрерывной работы).
Постоянное улучшение технологии и УФ источников позволяет создавать
более мощное и компактное оборудование: при одинаковых размерах
амальгамных и традиционных ртутных ламп низкого давления, выход УФ
излучения с одного сантиметра амальгамной лампы в несколько раз выше, что
позволило значительно сократить габаритные размеры оборудования. Ртуть в
амальгамных лампах находится в «связанном» состоянии. В случае разрушения
колбы амальгамной лампы нет необходимости проведения демеркуризации
(удаления ртути с целью исключения отравления людей). Срок службы этих
ламп в два раза превышает срок службы обычных ртутных ламп, кроме того,
лампы отличаются повышенной эффективностью.
По этому, основная цель – это создание надежных, безопасных и простых
устройств обеззараживания воздуха и поверхностей. Новейшие УФ системы
обеззараживания воздуха обеспечивают высокое качество и безопасность
воздушной среды при минимальных временных и эксплуатационных затратах.
Всего 3 минуты требуется облучателю для обеззараживания с эффективностью
99,99%.
Moderní vymoženosti vědy – 2017 • Díl 8
57
отырамын. Өйткені, ол оқушының ойлауын, елестету мен есте сақтау
белсенділігін, дағдысын білім саласының дамуын қамтамасыз етеді.Мұғалім
бала бойындағы туа біткен түрлі қасиеттерді дәл байқап, оның сапалық
ерекшеліктеріне баға беріп, ары қарай өз бетінше дамыта түсуіне жағдай туғызуы
керек, көмектесуі қажет. Бұл үшін, әрине ұстаздың өзі де өзгеруі, яғни дәстүрлі
оқытудың таптаулары сүрлеуінен арылуы тиіс. Осылайша оқытудың жаңа
мазмұнын жасауға бетбұрысты әрбір мұғалім өзінен бастағаны жөн. Мұғалім
шәкіртке білім, білік, дағды беріп қана қоймай, ақыл-ойы мен қабілетінің
дамуына көңіл бөліп, «оқи алуға үйрету керек». Мұғалім оқытуға кіріспес бұрын
оқушылардың мінездерін зерттеп, білімдерін тексеруі тиіс. «Қазіргі заманда
жастарға ақпараттық технологиялармен байланысты әлемдік стандартқа сай
мүдделі жаңа білім беру өте қажет»-деп елбасымыз өз жолдауында айтып қана
қоймай, әр мектепті түрлі ақпаратты техногиялармен қамтамасыз етуде. Яғни,
ақпараттық технологиялардың білім беруде маңызы зор. Өйткені ол оқушыларға
үлкен ақпараттық білім кеңістігіне жол көрсетеді.
ҚР «Білім туралы» Заңында «Білім беру жүйесінің басты міндеті – ұлттық
және азаматтық құндылықтар, ғылым мен практика жетістіктері негізінде жеке
адамды қалыптастыруға және кәсіби шыңдауға бағытталған, білім алу үшін
қажетті жағдайлар жасау, оқытудың жаңа технологияларын енгізу, білім беруді
ақпараттандыру, халықаралық ғаламдық коммуникациялық желілерге шығу»
деп, білім беру жүйесін одан әрі дамыту міндеттері көзделді. Бұл міндеттерді
шешу үшін мұғалімнің күнделікті ізденісі арқылы барлық жаңалықтар мен қайта
құру, өзгерістерге жол ашады . Бұл баланың ой өрісін кеңейтіп қана қоймайды,
білім деңгейін көтеруге үлкен үлесін қосады. Сабақ беруде мұғалім
оқушылардың жас ерекшелігін негізге алуы керек. Тапсырамаларды да меңгере
алатындай, сұрақтарға дұрыс жауап іздей алатындай етіп қою керек.Сол кезде
сабақ күтілген нәтижеге қол жеткізеді.
1. Мұғалім тәрбие сағаты кезінде билік жүргізу әдісінен арылуы керек.
2. Тәрбие сағаты кезінде сабақтағы басты тұлға мұғалім емес, оқушы
болуы тиіс.
3. Балалардың ізденуге деген ынтасын күшейту керек
4. Өз дербестігін, белсенділігін дамыту қажет.
5. Тәрбиелеу, дамыту жұмысын ұтымды жүргізу үшін баланың табиғи
талабын, қасиетін дер кезінде айқындау керек.
Moderní vymoženosti vědy – 2017 • Díl 8
56
MATEMATIKA
Aplikovaná matematika Аубакирова Г.А. диалогическое обучение
Аубакирова Гульнара Аблаевна
ДИАЛОГТІК ОҚЫТУ ТІРБИЕ ЖҰМЫСЫНДА
Бүгінгі таңда Қазақстанның дүниежүзілік білім кеңістігіне
ену қажеттілігі көтеріліп отырған кезеңде білім беру мәселесін, әдіс-тәсілдерді
инновациялық үрдістермен алмастыру арқылы жалпы білім сапасын арттыру
көзделген. Елімізде жүріп жатқан орта білім беру жүйесін реформалау ісі
мектептегі тәрбие жұмыстарын ғылыми негізде ұйымдастыру қажеттігін
туғызып отыр. Қоғам өміріндегі әлеуметтік-экономикалық жағдай неғұрлым
күрделене түскен сайын, соғұрльш мектеп оқушыларының да өсіп, жетілуінде
толып жатқан кедергілер мен қиыншылықтар көбейе түсуде. Осы орайда әрбір
мұғалім озық технологияларды терең талдаудан өткізіп, өзіне тиімдісін таңдауы
керек.Сонау ХХ ғасырдың басында Ж.Аймауытов: «Сабақ беру – жай үйреншікті
нәрсе емес, ол – жаңадан жаңаны табатын нәрсе» деген екен. Ал мен тарих пәні
мұғалімі және тәрбие беруші ретінде ұлттық құндылықтарды бойына сіңірген,
мәдени мұраларды жадында өшпестей етіп сақтаған құзіретті жеке тұлға
қалыптастыруда оқытудағы және тәрбиедегі жаңа тәсіл диалогтік оқытуды өз
сабақтарымда пайдаланып жүрмін.Бұл тәсілдің басқа технологиялардан
ерекшелігі жеті модуль арқылы іске асады. «Сабақ – оқытушының
педагогикалық мәдениетінің айнасы», -деп А.Сухомлинский айтқандай, осы жеті
модульдің ішінде өзімнің пәніме тиімдісі, жарыққа шығарары, баланың
қызығушылығын оятары, білімін жетілдірері қайсы екен деп көп ойланғаным
рас. Саралай келе әр сабақта бір немесе бірнеше модульді бірден қолдануға
болатынын анықтадым. Бұл қолданыстан ұтылғанымнан ұтқаным көп болды. Әр
мұғалім өз сабағының –көшбасшысы. Ал көшті дұрыс бағыттай білу ол
шеберлігіне байланысты.Жалпы менің оқу мен тәрбиелеудегі өз міндетім
оқушыларды өз бетімен жұмыс жасауға тәрбиелеу, үйрету, шығармашылық
қабілетін дамыту. Сондықтан тәрбие сағаттарында оқушылардан жиі тақырып
бойынша жеке ,жұптық,топтық жұмыс яғни пирамидалық тәсіл түрлерін алып
Moderní vymoženosti vědy – 2017 • Díl 8
33
Литература:
1. Микаева С.А., Микаева А.С., Железникова О.Е. Системы
обеззараживания ультрафиолетом. //Сборка в машиностроении,
приборостроении. - 2015. - №2. - С.44-48.
2. Микаева С.А., Микаева А.С. Системы обеззараживания
ультрафиолетовым излучением. //Справочник. Инженерный
журнал. - 2015. - №11. - С.59-64.
3. Микаева С.А., Петренко Ю.П. Экспериментальные исследования
генерации ультрафиолетового излучения.// Учебный эксперимент в
образовании. 2010. № 4. С. 82-88.
4. Микаева С.А., Микаева А.С. Обеззараживание ультрафиолетовым
излучением. // Учебный эксперимент в образовании. 2015. № 1 (73).
С. 82-89.

Moderní vymoženosti vědy – 2017 • Díl 8
34
Automatizované systémy řízení ve zpracovatelském průmyslu Борин В.С., Тихий А.Б. Математична модель технологічного процесу регенерації лиетиленгліколю
К.т.н. Борин В.С., магістр Тихий А.Б.
Івано-Франківський національний технічний університет нафти і газу,
Україна
МАТЕМАТИЧНА МОДЕЛЬ ТЕХНОЛОГІЧНОГО ПРОЦЕСУ РЕГЕНЕРАЦІЇ ДИЕТИЛЕНГЛІКОЛЮ
Відхилення технологічних параметрів процесу регенерації
від заданих норм призводить до зменшення концентрації регенерованого
розчину диетиленгліколю, що у свою чергу призводить до неефективного
осушення природного газу. Бажану якість (концентрацію) ДЕГу можна отримати
тільки при повному інформаційному забезпеченні і оптимальному керуванні
технологічним процесом. Одним з можливих шляхів вирішення цієї задачі є
автоматизація технологічного процесу регенерації диетиленгліколю з
використанням штучних нейронних мереж, яка дасть можливість моделювати за
допомогою ЕОМ даний технологічний процес та визначати вплив того чи іншого
параметру на процес регенерації. Абсорбція і десорбція – масообміні процеси,
які створюють основу абсорбційного розділення нафтових і природних газів.
Абсорбційний метод розділення вуглеводневих газів використовується в
промисловості для отримання газового бензину і рідких газів (пропан-бутанова
суміш). На процес регенерації диетиленгліколю впливають наступні параметри:
концентрація і кількість абсорбенту, температура і тиск в десорбері. При
осушенні газу до температури крапки роси -10С використовуються водні
розчини гліколю з концентрацією від 99% до 99,5% масових. Концентрація
гліколю залежить від ефективності регенерації. При регенерації ДЕГу при 0,1
МПа його концентрація становить 97,5%. Для одержання більш високої
концентрації створюють вакуум в десорбері. Концентрацію гліколя вибирають
виходячи з умов рівноваги між тиском насичених парів над розчином гліколя і в
газі при заданій температурі контакту. Кількість гліколя, який подається в групу
абсорберів залежить від тиску і температури в абсорбері (від 25 м3/год до 35
м3/год).
Moderní vymoženosti vědy – 2017 • Díl 8
55
3. Afinogenov L. P., Grushin S. I., Romanov V. E. Apparatus for research in the
atmospheric surface layer. - L.: Gidrometeoizdat, 1977. - 319 p.
4. Shvarts Ya. M. Rotary converter of the atmospheric electric field to AC
current. Copyright certificate №558241 G01W1/16. Published 15.05.1977.
Bulletin of inventions No. 18.
5. Zykov M. V., Yunda T. N. The analysis of the input circuit of the electrometer
with reverse connection // Metrology, 1981, №5. P. 58-62.
6. Sensor of electric field intensity "FIELD-2". Technical description and
manual. Leningrad: USSR State Committee for Hydrometeorology, 1989. –
35 p.
7. A device for measuring electric field strength. Technical description and user
manual. Rostov-na-Donu: Radiation physics environmental center, research
Institute of physics, Rostov state University, 1990. – 5 p.
8. RD 52.04.168-2001. The observations of atmospheric electricity. Methodical
instructions. 2002. – 31 p.
9. Grunskaya, L. V., Electromagnetism surface layer and its relationship with
geophysical and astrophysical processes. Vladimir: Posada, 2003. -103 p.
10. Electric field meter Vaisala EFM550. Prospect of VAISALA. – 4 p.
(www.vaisala.com)
11. Anisimov S. V. Device for measuring the electrical conductivity of the
atmosphere. RF patent № 2397515 G01W1/16 G01R29/12. Posted
20.08.2010.
12. Kopeikin V. V. Use of surface electric field for detecting underground
inhomogeneities // Geomagnetism and Aeronomy. Moscow: Nauka, 2011.
Volume 51, No. 5. P. 690-694.
13. Kiriakov V. Kh., Lyubimov V. V. Digital magnetic automatic variation station
// Dynamika naukowych badan – 2012 / Materialy VIII Miedzynarodowej
naukowi-praktycznej konferencji 07 – 15 lipca 2012/ Fizyka. Vol.22,
Przemysl. 2012. S. 31-35.
14. Lyubimov V., Kiriakov V. Digital autonomous automatic station/Exhibition
centre of the Russian Academy of Sciences. M. 2012
(http://www.expo.ras.ru/base/prod_data.asp?prod_id=5300).
15. Lyubimov V. V. Electrometric variometer // Sensors and Systems / Design
and manufacture of sensors, devices and systems. New appliances. M: "OOO
SenSiDat", 2014. No.2. P. 47-48.
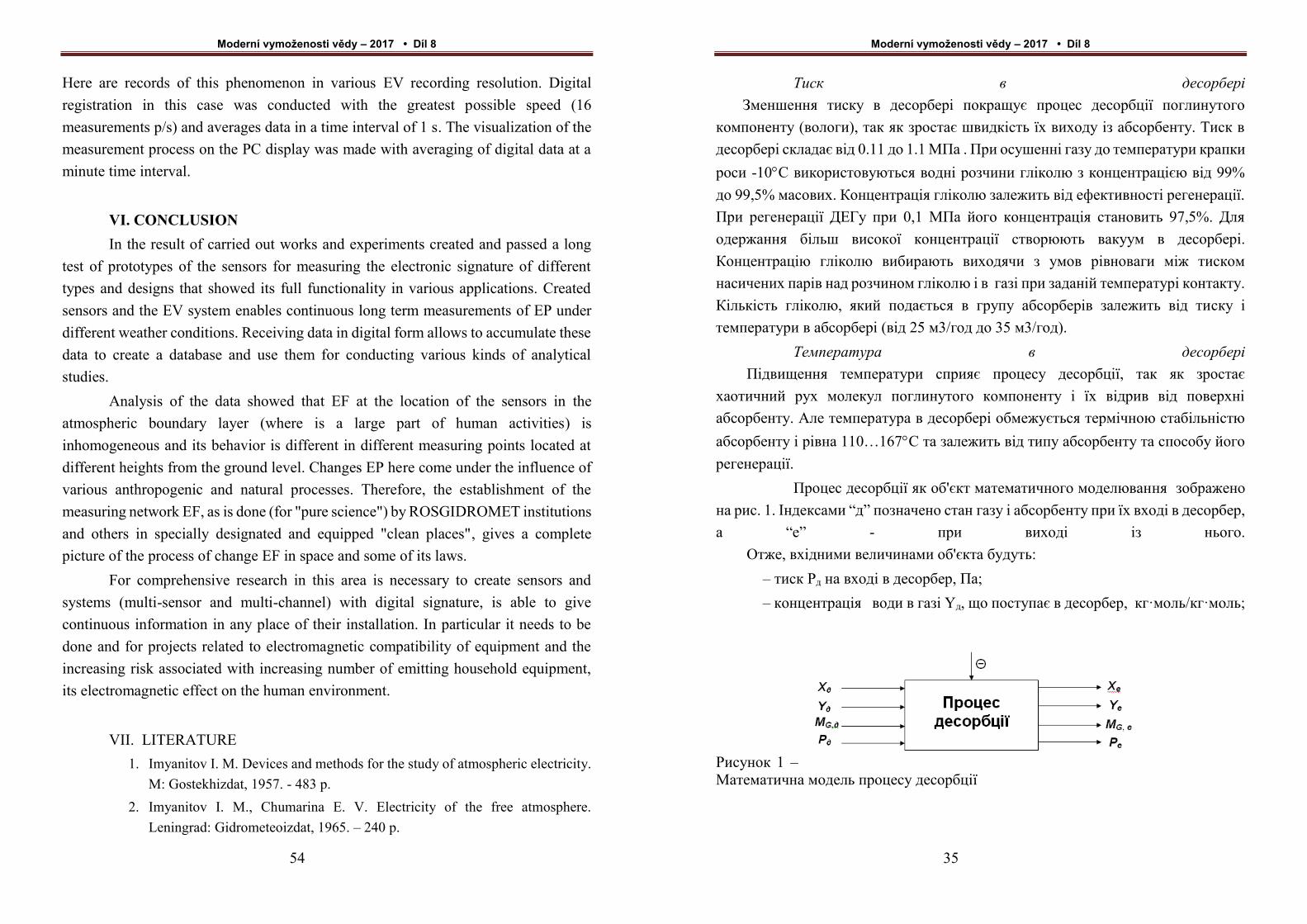
Moderní vymoženosti vědy – 2017 • Díl 8
54
Here are records of this phenomenon in various EV recording resolution. Digital
registration in this case was conducted with the greatest possible speed (16
measurements p/s) and averages data in a time interval of 1 s. The visualization of the
measurement process on the PC display was made with averaging of digital data at a
minute time interval.
VI. CONCLUSION
In the result of carried out works and experiments created and passed a long
test of prototypes of the sensors for measuring the electronic signature of different
types and designs that showed its full functionality in various applications. Created
sensors and the EV system enables continuous long term measurements of EP under
different weather conditions. Receiving data in digital form allows to accumulate these
data to create a database and use them for conducting various kinds of analytical
studies.
Analysis of the data showed that EF at the location of the sensors in the
atmospheric boundary layer (where is a large part of human activities) is
inhomogeneous and its behavior is different in different measuring points located at
different heights from the ground level. Changes EP here come under the influence of
various anthropogenic and natural processes. Therefore, the establishment of the
measuring network EF, as is done (for "pure science") by ROSGIDROMET institutions
and others in specially designated and equipped "clean places", gives a complete
picture of the process of change EF in space and some of its laws.
For comprehensive research in this area is necessary to create sensors and
systems (multi-sensor and multi-channel) with digital signature, is able to give
continuous information in any place of their installation. In particular it needs to be
done and for projects related to electromagnetic compatibility of equipment and the
increasing risk associated with increasing number of emitting household equipment,
its electromagnetic effect on the human environment.
VII. LITERATURE
1. Imyanitov I. M. Devices and methods for the study of atmospheric electricity.
M: Gostekhizdat, 1957. - 483 p.
2. Imyanitov I. M., Chumarina E. V. Electricity of the free atmosphere.
Leningrad: Gidrometeoizdat, 1965. – 240 p.
Moderní vymoženosti vědy – 2017 • Díl 8
35
Тиск в десорбері
Зменшення тиску в десорбері покращує процес десорбції поглинутого
компоненту (вологи), так як зростає швидкість їх виходу із абсорбенту. Тиск в
десорбері складає від 0.11 до 1.1 МПа . При осушенні газу до температури крапки
роси -10С використовуються водні розчини гліколю з концентрацією від 99%
до 99,5% масових. Концентрація гліколю залежить від ефективності регенерації.
При регенерації ДЕГу при 0,1 МПа його концентрація становить 97,5%. Для
одержання більш високої концентрації створюють вакуум в десорбері.
Концентрацію гліколю вибирають виходячи з умов рівноваги між тиском
насичених парів над розчином гліколю і в газі при заданій температурі контакту.
Кількість гліколю, який подається в групу абсорберів залежить від тиску і
температури в абсорбері (від 25 м3/год до 35 м3/год).
Температура в десорбері
Підвищення температури сприяє процесу десорбції, так як зростає
хаотичний рух молекул поглинутого компоненту і їх відрив від поверхні
абсорбенту. Але температура в десорбері обмежується термічною стабільністю
абсорбенту і рівна 110…167С та залежить від типу абсорбенту та способу його
регенерації.
Процес десорбції як об'єкт математичного моделювання зображено
на рис. 1. Індексами “д” позначено стан газу і абсорбенту при їх вході в десорбер,
а “е” - при виході із нього.
Отже, вхідними величинами об'єкта будуть:
– тиск Рд на вході в десорбер, Па;
– концентрація води в газі Yд, що поступає в десорбер, кг·моль/кг·моль;
Рисунок 1 –
Математична модель процесу десорбції
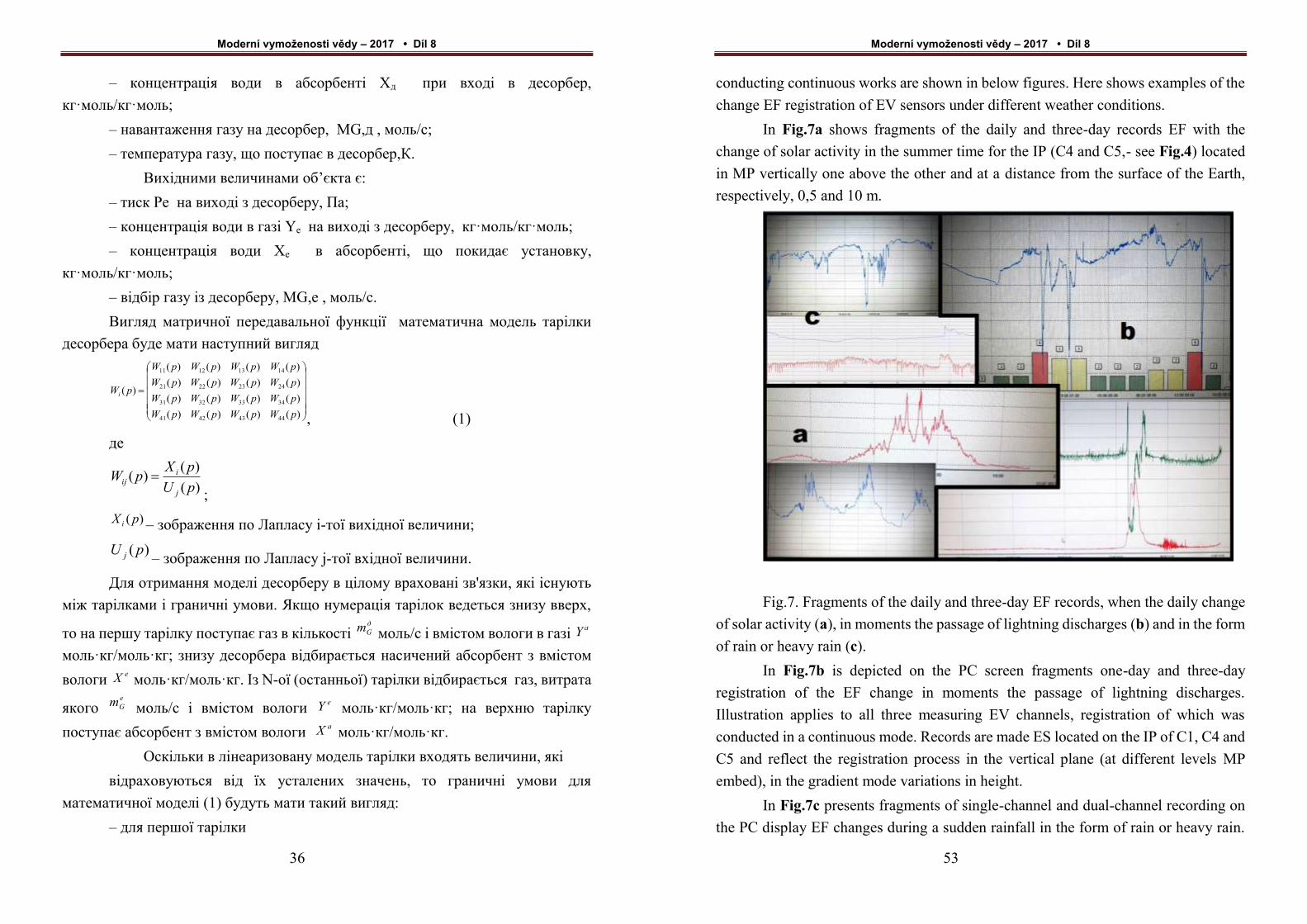
Moderní vymoženosti vědy – 2017 • Díl 8
36
– концентрація води в абсорбенті Хд при вході в десорбер,
кг·моль/кг·моль;
– навантаження газу на десорбер, MG,д , моль/с;
– температура газу, що поступає в десорбер,К.
Вихідними величинами об’єкта є:
– тиск Ре на виході з десорберу, Па;
– концентрація води в газі Yе на виході з десорберу, кг·моль/кг·моль;
– концентрація води Хе в абсорбенті, що покидає установку,
кг·моль/кг·моль;
– відбір газу із десорберу, MG,е , моль/с.
Вигляд матричної передавальної функції математична модель тарілки
десорбера буде мати наступний вигляд
)()()()(
)()()()(
)()()()(
)()()()(
)(
44434241
34333231
24232221
14131211
pWpWpWpW
pWpWpWpW
pWpWpWpW
pWpWpWpW
pWi
, (1)
де
)(
)()(
pU
pXpW
j
iij
;
)(pX i – зображення по Лапласу і-тої вихідної величини;
)(pU j – зображення по Лапласу j-тої вхідної величини.
Для отримання моделі десорберу в цілому враховані зв'язки, які існують
між тарілками і граничні умови. Якщо нумерація тарілок ведеться знизу вверх,
то на першу тарілку поступає газ в кількості д
Gm моль/с і вмістом вологи в газі aY
моль·кг/моль·кг; знизу десорбера відбирається насичений абсорбент з вмістом
вологи eX моль·кг/моль·кг. Із N-ої (останньої) тарілки відбирається газ, витрата
якого e
Gm моль/с і вмістом вологи eY моль·кг/моль·кг; на верхню тарілку
поступає абсорбент з вмістом вологи aX моль·кг/моль·кг.
Оскільки в лінеаризовану модель тарілки входять величини, які
відраховуються від їх усталених значень, то граничні умови для
математичної моделі (1) будуть мати такий вигляд:
– для першої тарілки
Moderní vymoženosti vědy – 2017 • Díl 8
53
conducting continuous works are shown in below figures. Here shows examples of the
change EF registration of EV sensors under different weather conditions.
In Fig.7a shows fragments of the daily and three-day records EF with the
change of solar activity in the summer time for the IP (C4 and C5,- see Fig.4) located
in MP vertically one above the other and at a distance from the surface of the Earth,
respectively, 0,5 and 10 m.
Fig.7. Fragments of the daily and three-day EF records, when the daily change
of solar activity (a), in moments the passage of lightning discharges (b) and in the form
of rain or heavy rain (c).
In Fig.7b is depicted on the PC screen fragments one-day and three-day
registration of the EF change in moments the passage of lightning discharges.
Illustration applies to all three measuring EV channels, registration of which was
conducted in a continuous mode. Records are made ES located on the IP of C1, C4 and
C5 and reflect the registration process in the vertical plane (at different levels MP
embed), in the gradient mode variations in height.
In Fig.7c presents fragments of single-channel and dual-channel recording on
the PC display EF changes during a sudden rainfall in the form of rain or heavy rain.
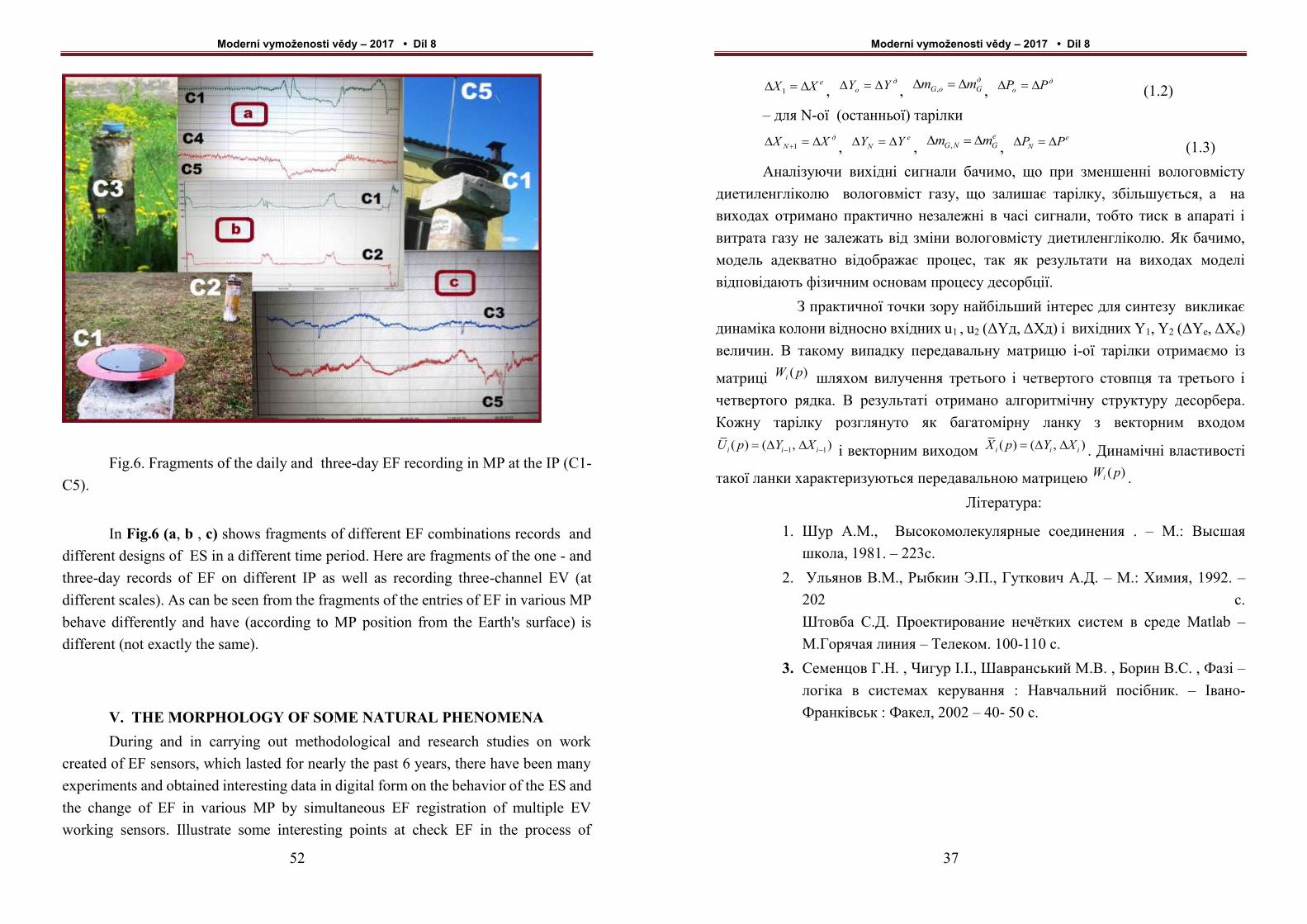
Moderní vymoženosti vědy – 2017 • Díl 8
52
Fig.6. Fragments of the daily and three-day EF recording in MP at the IP (C1-
C5).
In Fig.6 (a, b , c) shows fragments of different EF combinations records and
different designs of ES in a different time period. Here are fragments of the one - and
three-day records of EF on different IP as well as recording three-channel EV (at
different scales). As can be seen from the fragments of the entries of EF in various MP
behave differently and have (according to MP position from the Earth's surface) is
different (not exactly the same).
V. THE MORPHOLOGY OF SOME NATURAL PHENOMENA
During and in carrying out methodological and research studies on work
created of EF sensors, which lasted for nearly the past 6 years, there have been many
experiments and obtained interesting data in digital form on the behavior of the ES and
the change of EF in various MP by simultaneous EF registration of multiple EV
working sensors. Illustrate some interesting points at check EF in the process of
Moderní vymoženosti vědy – 2017 • Díl 8
37
eXX 1 , д
o YY , д
GoG mm , , д
o PP (1.2)
– для N-ої (останньої) тарілки
д
N XX 1 , e
N YY , e
GNG mm , , e
N PP (1.3)
Аналізуючи вихідні сигнали бачимо, що при зменшенні вологовмісту
диетиленгліколю вологовміст газу, що залишає тарілку, збільшується, а на
виходах отримано практично незалежні в часі сигнали, тобто тиск в апараті і
витрата газу не залежать від зміни вологовмісту диетиленгліколю. Як бачимо,
модель адекватно відображає процес, так як результати на виходах моделі
відповідають фізичним основам процесу десорбції.
З практичної точки зору найбільший інтерес для синтезу викликає
динаміка колони відносно вхідних u1 , u2 (ΔYд, ΔХд) і вихідних Y1, Y2 (ΔYе, ΔХе)
величин. В такому випадку передавальну матрицю і-ої тарілки отримаємо із
матриці )(pWi шляхом вилучення третього і четвертого стовпця та третього і
четвертого рядка. В результаті отримано алгоритмічну структуру десорбера.
Кожну тарілку розглянуто як багатомірну ланку з векторним входом
1 1( ) ( , )i i iU p Y X і векторним виходом ( ) ( , )i i iX p Y X . Динамічні властивості
такої ланки характеризуються передавальною матрицею )(pWi .
Література:
1. Шур А.М., Высокомолекулярные соединения . – М.: Высшая
школа, 1981. – 223с.
2. Ульянов В.М., Рыбкин Э.П., Гуткович А.Д. – М.: Химия, 1992. –
202 с.
Штовба С.Д. Проектирование нечётких систем в среде Matlab –
М.Горячая линия – Телеком. 100-110 с.
3. Семенцов Г.Н. , Чигур І.І., Шавранський М.В. , Борин В.С. , Фазі –
логіка в системах керування : Навчальний посібник. – Івано-
Франківськ : Факел, 2002 – 40- 50 с.
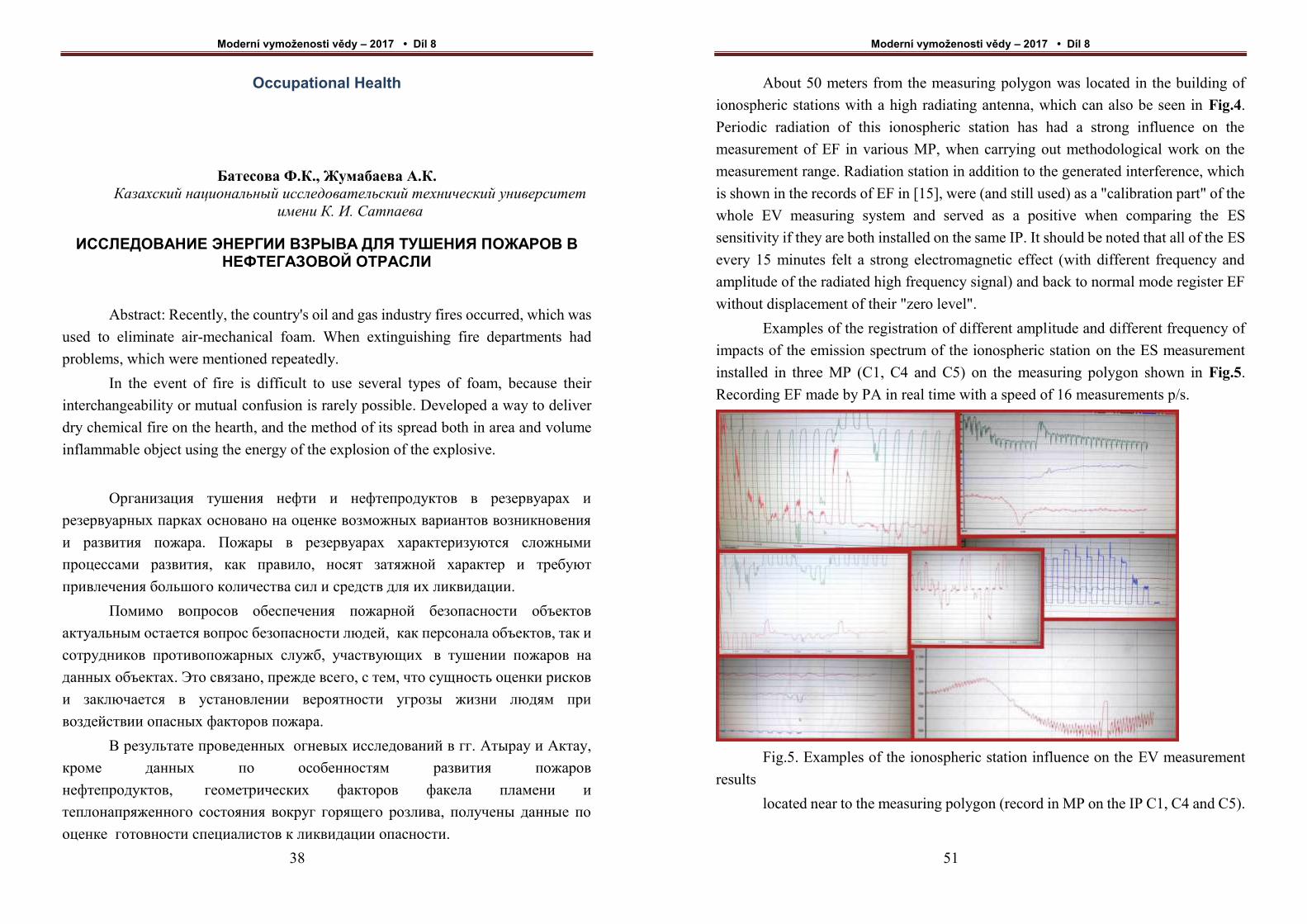
Moderní vymoženosti vědy – 2017 • Díl 8
38
Occupational Health Батесова Ф.К., Жумабаева А.К. ИССЛЕДОВАНИЕ ЭНЕРГИИ ВЗРЫВА ДЛЯ ТУШЕНИЯ ПОЖАРОВ В НЕФТЕГАЗОВОЙ ОТРАСЛИ
Батесова Ф.К., Жумабаева А.К.
Казахский национальный исследовательский технический университет
имени К. И. Сатпаева
ИССЛЕДОВАНИЕ ЭНЕРГИИ ВЗРЫВА ДЛЯ ТУШЕНИЯ ПОЖАРОВ В НЕФТЕГАЗОВОЙ ОТРАСЛИ
Abstract: Recently, the country's oil and gas industry fires occurred, which was
used to eliminate air-mechanical foam. When extinguishing fire departments had
problems, which were mentioned repeatedly.
In the event of fire is difficult to use several types of foam, because their
interchangeability or mutual confusion is rarely possible. Developed a way to deliver
dry chemical fire on the hearth, and the method of its spread both in area and volume
inflammable object using the energy of the explosion of the explosive.
Организация тушения нефти и нефтепродуктов в резервуарах и
резервуарных парках основано на оценке возможных вариантов возникновения
и развития пожара. Пожары в резервуарах характеризуются сложными
процессами развития, как правило, носят затяжной характер и требуют
привлечения большого количества сил и средств для их ликвидации.
Помимо вопросов обеспечения пожарной безопасности объектов
актуальным остается вопрос безопасности людей, как персонала объектов, так и
сотрудников противопожарных служб, участвующих в тушении пожаров на
данных объектах. Это связано, прежде всего, с тем, что сущность оценки рисков
и заключается в установлении вероятности угрозы жизни людям при
воздействии опасных факторов пожара.
В результате проведенных огневых исследований в гг. Атырау и Актау,
кроме данных по особенностям развития пожаров
нефтепродуктов, геометрических факторов факела пламени и
теплонапряженного состояния вокруг горящего розлива, получены данные по
оценке готовности специалистов к ликвидации опасности.
Moderní vymoženosti vědy – 2017 • Díl 8
51
About 50 meters from the measuring polygon was located in the building of
ionospheric stations with a high radiating antenna, which can also be seen in Fig.4.
Periodic radiation of this ionospheric station has had a strong influence on the
measurement of EF in various MP, when carrying out methodological work on the
measurement range. Radiation station in addition to the generated interference, which
is shown in the records of EF in [15], were (and still used) as a "calibration part" of the
whole EV measuring system and served as a positive when comparing the ES
sensitivity if they are both installed on the same IP. It should be noted that all of the ES
every 15 minutes felt a strong electromagnetic effect (with different frequency and
amplitude of the radiated high frequency signal) and back to normal mode register EF
without displacement of their "zero level".
Examples of the registration of different amplitude and different frequency of
impacts of the emission spectrum of the ionospheric station on the ES measurement
installed in three MP (C1, C4 and C5) on the measuring polygon shown in Fig.5.
Recording EF made by PA in real time with a speed of 16 measurements p/s.
Fig.5. Examples of the ionospheric station influence on the EV measurement
results
located near to the measuring polygon (record in MP on the IP C1, C4 and C5).

Moderní vymoženosti vědy – 2017 • Díl 8
50
IV. METHODICAL WORK
For testing sensors EV was organized measuring polygon (see Fig.4), which
includes technical building (pavilion) and measuring poles (IP). In the technical
building recording equipment (PA) system three-channel EV, which includes EB, SA
and PC. All was arranged five MP, four IP (C1...C4), which were located on both sides
of the technical building, and one of MP (C5) is mast-mounted above the roof of this
building at a distance of 10 m from the surface of the Earth. EV sensors were located
on the IP from different sides of the pavilion in the direction East-West. Extreme of
these IP separated from each other horizontally at a maximum distance of 30 m.
The IP was located at a different fixed distance from each other and from the
Earth's surface. On these measuring poles alternately or simultaneously varying the
investigated sensors in various combinations. General view of the technical building,
measuring polygon (top view and side view) and IP (C1...C5) fitted ES shown in Fig.4.
Fig.4. The scheme of technical building location and IP with ES at the
measuring polygon.
Moderní vymoženosti vědy – 2017 • Díl 8
39
Каждый из опасных факторов пожара, таких как тепло, токсические газы,
дым, открытый огонь, являются угрожающими для жизни человека. Степень
угрозы этих факторов зависит не только от объективных характеристик пожара
(задымленность, фронт огня, температура и др.), но также и от субъективных
особенностей человека. Любые экстремальные ситуации, а тем более связанные
с факторами смертельной опасности, предъявляют повышенные требования к
физиологическому и психическому состоянию пожарного и вызывают особую
перестройку поведения. При этом могут наблюдаться дезорганизация
деятельности, нарушения в протекании процессов восприятия, мышления,
памяти и эмоций по типу «блокады» психических функций.
Частота возникновения пожаров на объектах нефтегазовой отрасли здесь
гораздо выше, чем в других регионах. По данным анализа пожаров, количество
пожаров, произошедших в Атырауской (18 пожаров, 17%), Мангистауской (16
пожаров, 15%) областях, составляет 32% всех пожаров произошедших на
объектах нефтегазовой отрасли Казахстана (далее – НГО).
Каждый пожар представляет собой единственную в своем роде ситуацию,
определяемую различными событиями и явлениями, носящими случайный
характер, например особенности объекта, пожароопасные свойства горючего,
особенности противопожарной защиты объекта, изменение направления и
скорости ветра во время пожара и т. п. Поэтому точно предсказать развитие
пожара во всех деталях не представляется возможным. Однако пожары обладают
общими закономерностями, что позволяет построить аналитическое описание
общих явлений пожаров и их параметров. Знание теоретических основ развития
пожара помогает определить тактику тушения пожара, безопасное расстояние
для участников тушения к каждой конкретной ситуации, что в свою очередь,
отразится на эффективности тушения пожара.
Чем ближе к очагу пожара находятся участники тушения, тем более
эффективным будет процесс тушения. Следовательно, наибольшее количество
людей должны находиться в непосредственной близости к очагу пожара, на
расстоянии 2-3 м. При этом для обеспечения безопасности людей, они должны
быть соответствующим образом защищены.
Во время крупномасштабных огневых исследований пожара розлива
нефтепродуктов на полигонах в г. Атырау в 2010году и г. Актау в 2011 году при
тушении горящего нефтепродукта использовались новые установки пенного

Moderní vymoženosti vědy – 2017 • Díl 8
40
пожаротушения типа «Пурга»: УКТП «Пурга -2,-5, -10,-30» (см рисунок 1),
которые зарекомендовали себя как надежные и эффективные средства для
тушения пожаров нефтепродуктов.
Рисунок 1 – Тушение горящего нефтепродукта установками пенного
пожаротушения типа «Пурга» во время крупномасштабных огневых
исследований пожара розлива нефтепродуктов
Вместе с тем, преимуществом применения установки «Пурга» является
увеличение дальности подачи пены в очаг пожара, что позволяет увеличить
расстояние от позиции ствольщика до очага пожара на более безопасное
расстояние. Кроме того, дальность подачи огнетушащего вещества всегда
позитивно влияет на маневренность.
В данной работе предлагается один из методов использования порошков
для более широкого его применения, а именно использование энергии взрыва
для тушения пожара порошком.
Огнетушащие порошки представляют собой мелко измельченные
минеральные соли с различными добавками, препятствующими слеживаемости
и комкованию.
Тушение пожаров порошковыми составами объясняются действием
следующих факторов:
- разбавлением горючей среды газообразными продуктами разложения
порошка или порошковым облаком;
- охлаждением зоны горения в результате затрат тепла на нагрев части
порошка, их частичное испарение и разложение в пламени;
- эффектом огнепреграждения, достигаемые при прохождении пламени
через узкие каналы порошковым облаком;
Moderní vymoženosti vědy – 2017 • Díl 8
49
described in [13, 14], but without the positioning systems and systems connected with
the wireless transmission distance.
EB included three-channel amplifier (US), a control circuit (CC), control
microprocessor (CMP), ADC, and power supply unit (PSU). To control the
temperature of the external environment used precision integrated temperature sensor
(DT) made on the basis of LM35 chip connected to one of the ADC channels. When
powered EV from AC voltage of 220 V and frequency 50 Hz device consumption was
not more than 1,5 VA.
Fig.3. A functional sheme of a three-channel EV.
Structurally, EB was performed in a metal box dimensions 225х145х80 mm,
on the side panels which are all the controls for EV and connectors to connect the three
ES, SA (or RB) and PC. The device is designed for long continuous operation in any
weather, both in the field and in the Observatory conditions with the installation of the
ES on a pedestal, on a special stand outside the room (on MP) or on the measuring post
(IP). Connecting ES with EB was carried out using a shielded cable type UL2464 4C
and 9C (see Fig.3) different lengths depending on the distance from MP to IP.

Moderní vymoženosti vědy – 2017 • Díl 8
48
from 120 to 375 Hz. All the ES and EB schemes were powered a constant voltage of ±
5 V from the power source, which used rechargeable battery (RB) voltage 9...24 V (in
the field) or standard SA when powered EV from AC voltage of 220 V and frequency
50 Hz, the consumption of the device was not more than 1,2 VA. The cable, which will
connect ES and EB, were screened and had a length (at different points in experimental
studies) from 10 to 25 m. With this cable were feeding the supply voltage for all ES
circuits, as well as the transmission of analog data in EB. Further, by using located in
EB of 24-bit ADC (based on the AD7734 chip), the analog data is converted into digital
form and then supplied to the registrar, as using a PC.
Fig.2. General view of various ES designs installed in MP to IP.
III. THE THREE-CHANNEL ELECTROMETRIC VARIOMETER
All created by the EP sensors have different sensitivity and to compare them
with each other in scale and in time, was designed multichannel data acquisition
system, functional sheme of which is shown in Fig.3. This system includes three
measuring channel and was created based on EB, which was used in the devices
Moderní vymoženosti vědy – 2017 • Díl 8
41
- ингибированием химических реакций в результате развития процесса
горения, испарения и разложения порошком.
Установка тушения пожаров порошковыми составами могут быть
стационарными (с ручным, дистанционным и автоматическим включением) и
передвижными (автомобили порошкового тушения, возимые и ручные
огнетушители). Порошковый огнетушащий состав подается в очаг горения
стволом – пистолетом, снабженный запорным устройством для включения и
выключения подачи порошка. Недостатком данного способа является
ограниченная дальность подачи порошка и нахождение операторов в зоне
высоких температур.
Разработан способ доставки огнетушащего порошка на очаг горения и
метод его разброса как по площади, так и по объему возгораемого объекта с
использованием энергии взрыва взрывчатого вещества. Доставка и разброс
огнетушащего вещества осуществляется с безопасного расстояния, что очень
важно при тушении больших очагов горения углеводородного состава. На
небольшие расстояния доставка может осуществляться и механическими
средствами.
Рисунок 2 – Принципиальная схема процесса доставки контейнеров при
тушении пожаров ЛВЖ и ГЖ твердой двуокисью углерода: 1 - стволовая
установка контейнерной доставки огнетушащих веществ; 2 - контейнер,
начиненный гранулами твердой двуокиси углерода; 3 - резервуар с ГЖ и ЛВЖ
Учитывая, что огнетушащий порошок может разлетаться по ветру
предполагаемый способ предусматривает компактную доставку порошка на очаг
возгорания, где срабатывает взрыватель и взрывом разбрасывается порошок по

Moderní vymoženosti vědy – 2017 • Díl 8
42
объемной поверхности. При сильном пламени горения предусмотрено двойное
действие, т.е. сперва пламя огня сдувается направленной энергией, а затем на это
место принудительно наносится управляемый поток огнетушащего вещества.
ЛИТЕРАТУРА
1. Руководство по тушению пожаров нефти и нефтепродуктов в
резервуарах. ВНИИПО, ГУГПС МЧС РФ, МИПБ, М., 2000г.- 48 с.
2. Указания по тушению пожаров нефти и нефтепродуктов в
резервуарах. ВНИИПО, ГУПО, МВД, М., 1991г.- 60 с.
3. "Пожаровзрывоопасность веществ и материалов и средства
тушения". Справочник. 4.1 и П, М., "Химия", 1990г.- 384 с.
Moderní vymoženosti vědy – 2017 • Díl 8
47
charging. That is, with the period of the operating frequency, which is MDM
transformation, MDM-amplifier controls the change of the potential difference on the
working of measuring plates. The output of such a converting is a slowly varying
voltage proportional to the change in EF between the measuring plates. This scheme
of input part of the EV has a low level of noise, high sensitivity and very low “zero
drift”. The performance of the amplifier circuit A1 is limited in our case, the value of
the carrier frequency (110-130 Hz) at which the signal conversion.
The main part of the scheme was implemented on the basis of the operational
amplifier (OA) type 140 UD13 and placed inside the grounded housing of ES under
measuring plates. The ES connection with the recording equipment located in the
technical building, was carried out by means of connecting shielded cable of 25 m
length. Power schemes EV was carried out using the AC adaptor (SA) with 12 V DC
from AC.
In early 2012, created a new design ES shown in Fig. 2a, Fig.2c and Fig.2e,
which differed from the previously described sensor of EF the fact that there was no
built-in electronic unit, as well as were designed protection from bad weather
conditions for use of MP in conducting continuous research. ES is designed to work in
open atmosphere. Operating conditions: temperature from -50° to 50°C, humidity
≤100%, pressure 750 ± 30 mm Hg.St. The dynamic range of the measured values of
variation of the EF intensity from 0 to ± 1500 V/m (regulated and had the ability to
scale by means of specially written programs for the PC).
In the same year, has been designed and developed EV new design described
in [15], and a general view of the ES is shown in Fig.2b and Fig.2d. Case of ES is
made in the form of a flat cylinder with a diameter of 120 mm and a height of 40 mm
(see diagram in Fig.1a.), within which are mounted: MDM-amplifier, integrator,
bandpass filter and DC-DC converter and control circuit for the calibration of the
device. The measuring plates of this sensor EV are flat (sectional) metal plate thickness
of 1 mm and a diameter of 240 mm, mounted on the insulator polycarbonate at a
distance of 10 mm from each other. On the sensor housing are EV controls, which are
the inclusion and calibration of the sensor.
MDM-amplifier was made on the basis of OA type ICL7650, which had a high
input impedance (10¹² Ohm), low temperature coefficient (0,01 µv/°C) and very low
drift over time (100 nV/month). This OA was already a higher frequency compared to
the previously used, the operating frequency of MDM-conversion was in the range

Moderní vymoženosti vědy – 2017 • Díl 8
46
Fig.1. A simplified scheme of the field voltage converter EV is made
with the use of MDM-amplifier (a) and general view of various ES designs (b), (c) and (d).
The operation of the circuit is as follows. The flow electrostatic induction
measured EF induces an electric charge on the sensors measuring plates, which is made
in the form of a flat capacitor. Further, with the help of the electronics box (EB), is the
transformation of the electric field – current – voltage – digital code, whereby on the
recorder (e.g. on the display of a personal computer - PC) is indicated by process
changes (variations) of EF in time, and the digital data recorded on the hard disk (or
flash drive) in a PC.
At the input of the amplifier A1 (to improve its stability covered both internal
and external negative feedback) is a precision modulator which converts the input DC
voltage to the amplitude of the AC. Next, the AC signal is amplified and is demodulated
by a synchronous demodulator, which allows to maintain the linearity of the conversion
and small zero drift. MDM-amplifier circuit performs the function similar to the
exposure plates in the sensors-"turntables" [4, 6, 7, 11], which periodically with the
frequency of rotation of the ground (exposed) potential EF, achiever the working plate
Moderní vymoženosti vědy – 2017 • Díl 8
43
FYZIKA Lyubimov V. V. TEST RESULTS OF DIFFERENT ELECTROMETRIC VARIOMETER SENSORS
Lyubimov V. V.
Pushkov institute of terrestrial magnetism, ionosphere and radio wave
propagation (IZMIRAN) Russian Academy of Sciences
TEST RESULTS OF DIFFERENT ELECTROMETRIC VARIOMETER SENSORS
I. INTRODUCTION
The existence of the electric field (EF) in the Earth's atmosphere is mainly due
to the processes of air ionization and spatial separation of the ionization occurs when
positive and negative electric charges. EF, in spite of the complexity of the systems
and conditions of their registration, are considered in geophysics as one of the main
physical factors of the processes occurring in the surface layer.
From [1-3, 9] show that variation of the EF surface layer caused by geophysical
processes may experience changes up to orders of magnitude above the background.
Many atmospheric processes such as solar activity, convection and formation of
clouds, precipitation, lightning discharges cause partial separation of opposite charges
and the emergence of atmospheric EF, with respect to the atmosphere surface of the
earth is charged negatively. Existence EF the atmosphere causes currents, discharge
electric "condenser" atmosphere - surface of the Earth.
In recent years more and more attention of researchers attracts the problem of
the impact on the environment geophysical factors [9], has created quite a lot of
different methods and unique instrumentation for the measurement of EF, some of
which are presented in [1-12]. It was important to research the electrical characteristics
of the atmospheric boundary layer, where flows a large part of human activity. Changes
EF here come under the influence of various anthropogenic and natural processes.
Therefore, the main objective of the research is the monitoring of the EF surface layer
of the atmosphere with the impact of anthropogenic processes on the natural EF.
Improvement of techniques for the study of EF surface layer of the atmosphere
is currently pressing problem for researchers and practitioners, including the creation

Moderní vymoženosti vědy – 2017 • Díl 8
44
of new methods and devices for monitoring atmospheric EF. An important task is the
creation, for example - ROSGIDROMET (methods RD52.04.567-96 and
RD52.04.168-2001) [8], a measurement network spaced stations equipped with
modern instruments capable of operating in all weather conditions.
Described in this article work is proactive and is based on the results of long-
term stationary measurements of EF in the atmospheric surface layer carried out on the
territory of IZMIRAN at spaced measuring points (MP) for small measuring range. At
the same time, the ideology of the whole work was aimed at the creation of new sensors
and modern digital devices that can operate under various weather conditions and to
ensure the monitoring of atmospheric EF in all of MP. Using these sensors and
instruments the researchers will be able to implement ground-based diagnostics of
different nature EF and analysis of their interactions with the geophysical and
meteorological processes, as well as the possibility of creating a digital database of the
measured data.
II. THE SENSORS
The analysis of the works of some Russian and foreign authors and the currently
available devices [1, 3, 6, 10, 11] designs of the EF sensors [3-6, 12] showed that the
main drawback of their work is the limited possibility of their application to work in
all weather conditions, rain and snow. Designs used EF sensors made in the form of
"turntables" [4, 6, 7, 10, 11], with mechanical drives of various modifications and
embodiments. This scheme sensors used for converting slowly varying values of EF in
the AC signal (field-voltage), which was easier to work and carry out amplification,
filtering and subsequent data registration. These sensors are used for absolute
measurements of EF, quite unreliable and unstable in time, as all "mechanics" as a
result of intensive exploitation have limited resource. The replacement of the
mechanical moving parts the sensors of EF leads to real change of their metrological
characteristics. There are problems with prolonged operation and use of devices that
are associated with the need for periodic calibration of sensors due to the instability of
the "zero" (leaving "zero"). Because unsecured design, the EF sensors typically operate
intermittently and are unable to work effectively during periods of precipitation or in
conditions of high humidity. In addition to the installation of such sensors must, in
accordance with the recommendations of methodic [8], to choose and equip a certain
Moderní vymoženosti vědy – 2017 • Díl 8
45
place and MP, free from manmade noise and interference, where distortion EF of the
atmosphere are minimal or constant.
The purpose of our work and research was the establishment of the construction
of all-weather sensor that can work in any MP.
The first prototype sensor design with digital signature, according to the above
requirements, was created in 2010. The idea of the sensor construction (field-voltage
converter) consisted in the rejection of mechanical components using in the external
sensor (ES). It was proposed to build not an absolute instrument for measuring
potential EF relative to the surface of the Earth, and to measure the value of EF and its
variations between the two isolated from each other and spaced at a certain distance of
the electrodes and measuring plates or disks. Neither of these two electrodes discs
should not be grounded. The distance between disks and their size could vary and raise
(move to MP) relative to the level of the Earth's surface, including measurements below
this level, for example, in natural and artificial cavities. That is, a device to record the
change in the potential difference between two insulated electrodes and, in fact, was –
electrometric variometer (EV). It was assumed and implemented the replacement of
the mechanical node of the inverter slowly changing EF signal to the electronic part,
based on the DC amps with MDM (modulator-demodulator) signal processing, which
have high stability and low drift of the zero time. A simplified functional diagram of
such a field-voltage converter EV is shown in Fig.1a and includes sensor and
measuring amplifier A1. As the EF sensor used two ungrounded measuring plates
round shape of the foil fiberglass (in the form of a capacitor), which were placed in a
grounded housing at some (defined) distance from each other. General view of the ES
sensors shown in Fig.1 (b, c, d) and Fig.2e.