modern contral systems1 lecture 06 analysis (ii) controllability and observability 6.1...
TRANSCRIPT

Modern Contral Systems 1
Lecture 06 Analysis (II) Controllability and Observability
6.1 Controllability and Observability
6.2 Kalman Canonical Decomposition
6.3 Pole-zero Cancellation in Transfer Function
6.4 Minimum Realization

Modern Contral Systems 2
Motivation1
2
1
2
1
2
1
01
)(0
1
10
12
x
xy
tux
x
x
x
1s 1s 1
1 2
u y1x2x
s
x )0(2
s
x )0(1
1 1x2x
1controllable
uncontrollable

Modern Contral Systems 3
DuCxy
RxBuAxx n
,
Controllability and Observability
Plant:
Definition of Controllability
A system is said to be (state) controllable at time , if there exists a finite such for any and any , there exist an input that will transfer the state to the state at time , otherwise the system is said to be uncontrollable at time .
0t01 tt )( 0tx 1x
][ 1,0 ttu )( 0tx
1x 1t
0t

Modern Contral Systems 4
1
1
)(sU
)(sY1
-1s
3 -1s 2
Example: An Uncontrollable System
xy
uxx
21
0
1
30
01
1x
2x
※ State is uncontrollable.2x
BABAABBU
nUrankBAn 12
,)(leControllab ,
0)det( U
Controllability Matrix
BABAABBU n 12Matrix ility Controllab
Ru if
Modern Contral Systems 5
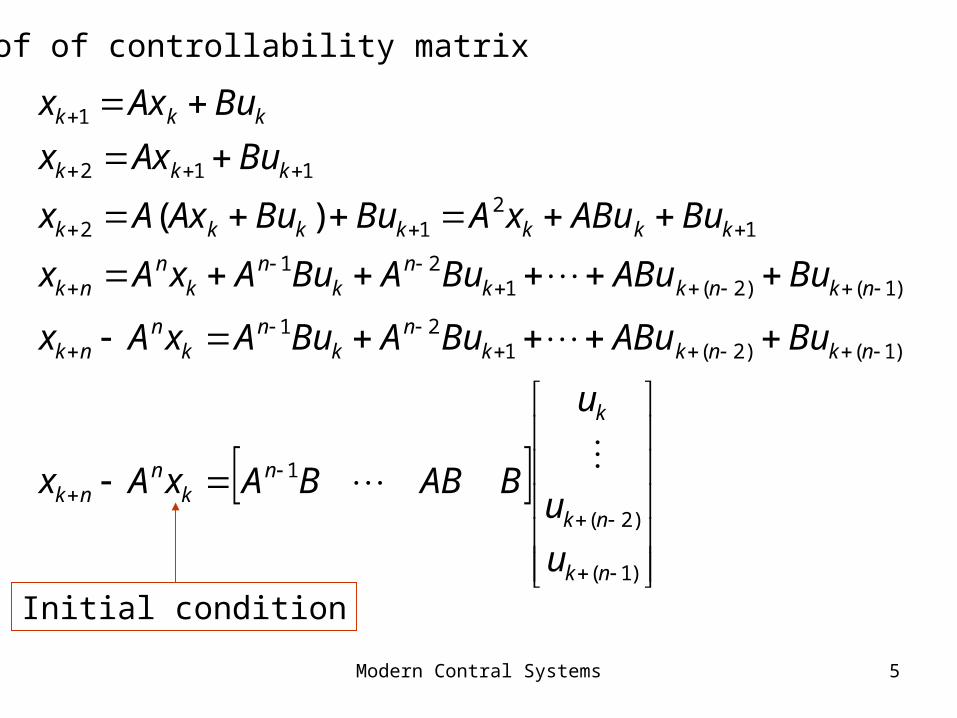
Proof of controllability matrix
)1(
)2(
1
)1()2(121
)1()2(121
12
12
112
1
)(
nk
nk
k
nk
nnk
nknkkn
kn
kn
nk
nknkkn
kn
kn
nk
kkkkkkk
kkk
kkk
u
u
u
BABBAxAx
BuABuBuABuAxAx
BuABuBuABuAxAx
BuABuxABuBuAxAx
BuAxx
BuAxx
Initial condition

Modern Contral Systems 6
Motivation2
2
1
2
1
2
1
01
)(1
3
10
02
x
xy
tux
x
x
x
1s 1s 1
1 2
u y1x2x
s
x )0(2
s
x )0(1
1 1x2x
3 observableunobservable

Modern Contral Systems 7
Definition of Observability
A system is said to be (completely state) observable at time , if there exists a finite such that for any at time , the knowledge of the input and the output over the time interval suffices to determine the state , otherwise the system is said to be unobservable at .
0t 01 tt )( 0tx][ 1,0 ttu
],[ 10 tt
0x
0t
0t][ 1,0 tty
Modern Contral Systems 8
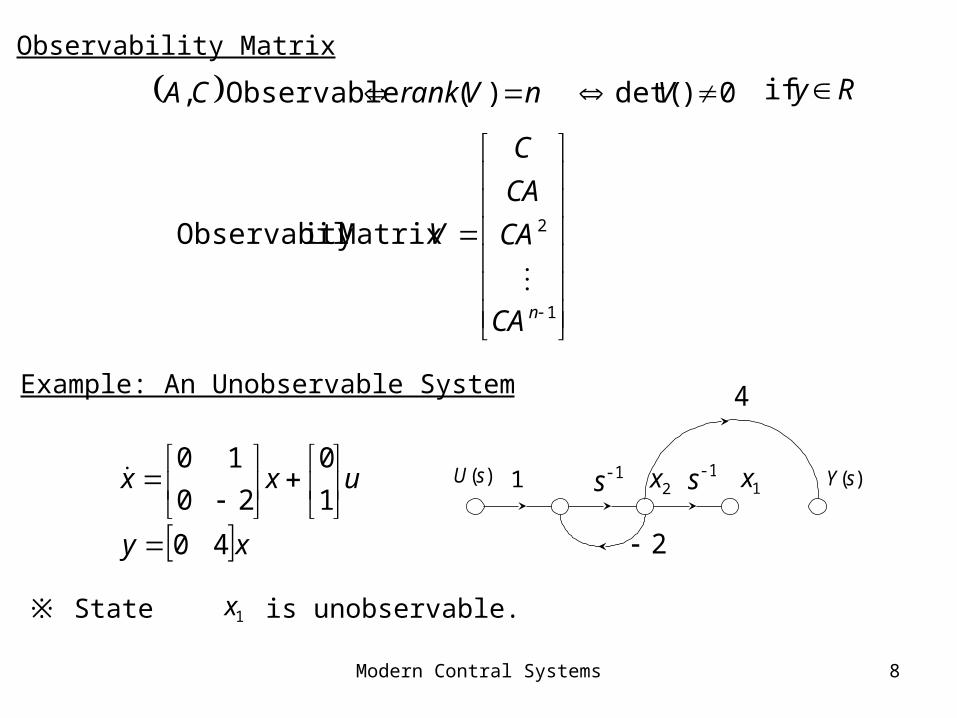
Example: An Unobservable System
xy
uxx
40
1
0
20
10
※ State is unobservable.1x
1)(sU -1s -1s 1x2x
2
4
)(sY
nVrankCA )(Observable , 0)det( V
1
2Matrix ity Observabil
nCA
CA
CA
C
V
Observability Matrix
Ry if

Modern Contral Systems 9
Proof of observability matrix
)1()2()3(11
1
)1()2(1321
1
111
111
1
)(),2(),1(
)(
)2()(
)1(
nknknkkkkkk
k
n
nknkkn
kn
kn
nk
kkkkkkk
kkk
kkk
kkk
DuCBuCABuDuCBuyDuy
x
CA
CA
C
n
nDuCBuBuCABuCAxCAy
DuCBuCAxDuBuAxCy
DuCxy
DuCxy
BuAxx
Inputs & outputs

Modern Contral Systems 10
10,1
0,
01
10
CBA
2)()( NrankVrank
01
10 ty Matrix Obervabili
01
10ix ility MatrControllab
CA
CN
ABBV
Example
DuCxy
RxBuAxx n
,
Plant:
Hence the system is both controllable and observable.

Modern Contral Systems 11
Theorem I
)()()( tuBtxAtx cccc
Controllable canonical form Controllable
Theorem II
)()(
)()()(
txCty
tuBtxAtx
oo
oooo
Observable canonical form Observable

Modern Contral Systems 12
example
c
cc
xy
uxx
12
1
0
32
10
Controllable canonical form
12
12
31
10
CA
CV
ABBU
nVrank
nUrank
1][
2][
o
oo
xy
uxx
10
1
2
31
20
Observable canonical form
31
10
11
22
CA
CV
ABBU
nVrank
nUrank
2][
1][
)2)(1(
2)(
ss
ssT

Modern Contral Systems 13
Theorem III
)()()(
)()()(
tDutCxty
tButJxtx
Jordan form
321
3
2
1
3
2
1
CCCC
B
B
B
B
J
J
J
J
Jordan block
Least row has no zero row
First column has no zero column
Linear system1. Analysis

Modern Contral Systems 14
Example
xccy
ub
b
xx
3
1100
020
012
1211
12
11
If 012 b uncontrollable
If 011 c unobservable

Modern Contral Systems 15
xy
uxx
2
1
0
203
102
200
201
101
211
100010
211
100010
001
000
1
1
1
2
2
2
1
1
1
1
11b
12b13b
21b
11C 12C 13C 21C

Modern Contral Systems 16
....
....
21131211
21131211
ILCILCCC
ILbILbbb
controllable
observable
In the previous example
....
....
21131211
21131211
DLCILCCC
ILbILbbb
controllable
unobservable

Modern Contral Systems 17
0
0
1
001
002
113
111
111
122
0
1
0
0
1
1001
123111
112
112
11
112
22
12
y
uxxL.I.
L.I.
L.I. L.D.
Example
Modern Contral Systems 18
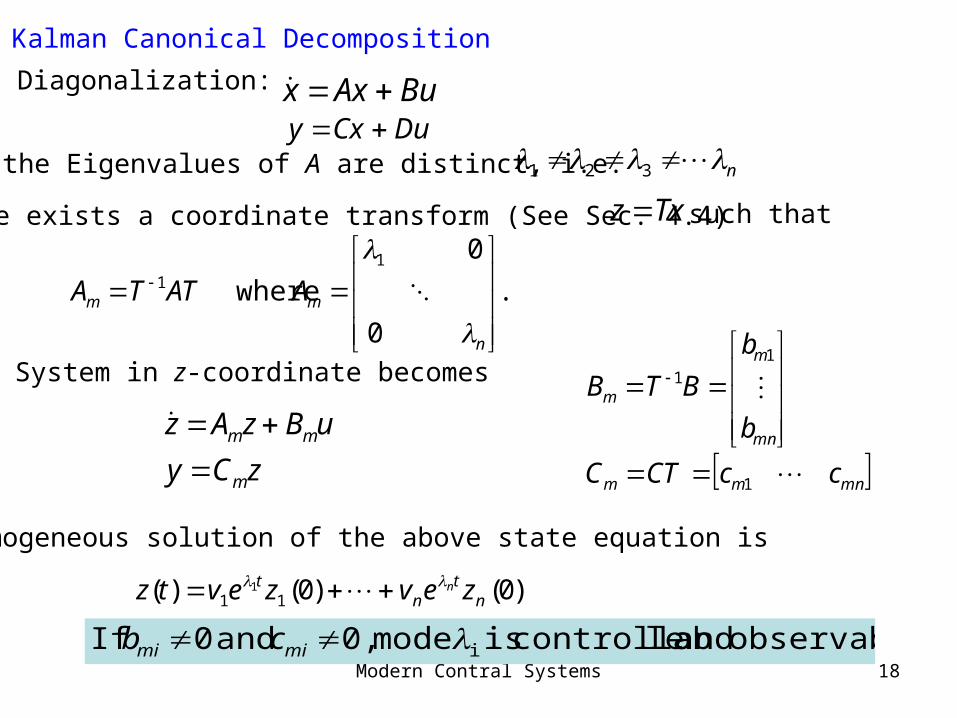
zCy
uBzAz
m
mm
)0()0()( 111
nt
nt zevzevtz n
BuAxx DuCxy
Txz
observable and lecontrollab is mode 0, and 0 If i mimi cb
Kalman Canonical Decomposition
Diagonalization:
There exists a coordinate transform (See Sec. 4.4)
n 321All the Eigenvalues of A are distinct, i.e.
such that
mnmm
mn
m
m
ccCTC
b
b
BTB
1
11
.
0
0
where1
1
n
mm AATTA
System in z-coordinate becomes
Homogeneous solution of the above state equation is

Modern Contral Systems 19
][ 21 n,v, , vvT
The coordinate matrix for diagonalization
t.independen are , rs,Eigenvecto 21 n,v, , vv
n 321All the Eigenvalues of A are distinct, i.e.
How to construct coordinate transformation matrix for diagonalization
ubzλz
ubzz
ubzz
mnnnn
m
m
2222
1111
nmnmm zczczcy 2211
Consider diagonalized system

Modern Contral Systems 20
n
mnmnmmn
i i
mimi
s
bc
s
bc
s
bcsH
1
11
1
)(
Transfer function is
le,unobservabor ableuncontroll is mode 0,or 0 If i mimi cb
H(s) has pole-zero cancellation.
1
1mc1mb
2
2mc2mb
n
mncmnb
∑
)(tu
)(ty

Modern Contral Systems 21
)(ty
OCS
COS
OCSOCS
)(tu
Kalman Canonical Decomposition
Subsystem ble Unobservale,Controllab:OCS
Subsystem Observable able,Uncontroll:OCS
Subsystem Observable le,Controllab :COS
Subsystem ble Unobservaable,Uncontroll:OCS

Modern Contral Systems 22
xCCy
uB
B
x
x
x
x
A
A
A
A
x
x
x
x
OCCO
OC
CO
OC
OC
OC
CO
OC
OC
OC
CO
OC
OC
OC
CO
00
0
0
000
000
000
000
Kalman Canonical Decomposition: State Space Equation
(5.X)
Modern Contral Systems 23
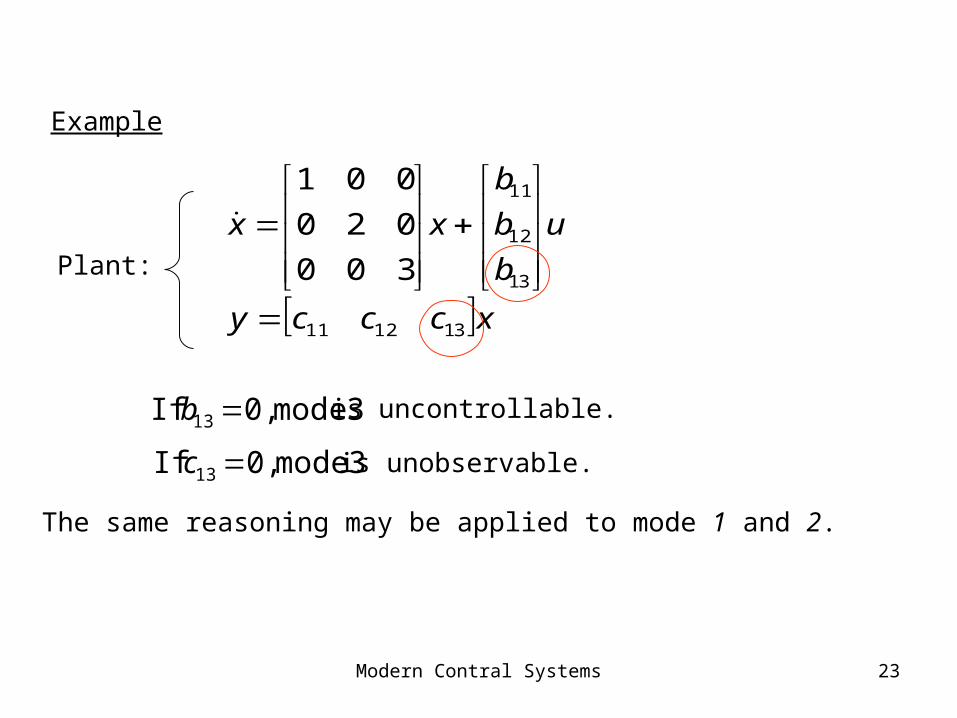
Example
xcccy
u
b
b
b
xx
311211
31
12
11
300
020
001
3 mode 0, If 13 b
3 mode 0, If 13 c
The same reasoning may be applied to mode 1 and 2.
Plant:
is uncontrollable.
is unobservable.
Modern Contral Systems 24
n
mnmnmmn
i i
mimi
s
bC
s
bC
s
bCsH
1
11
1
)(
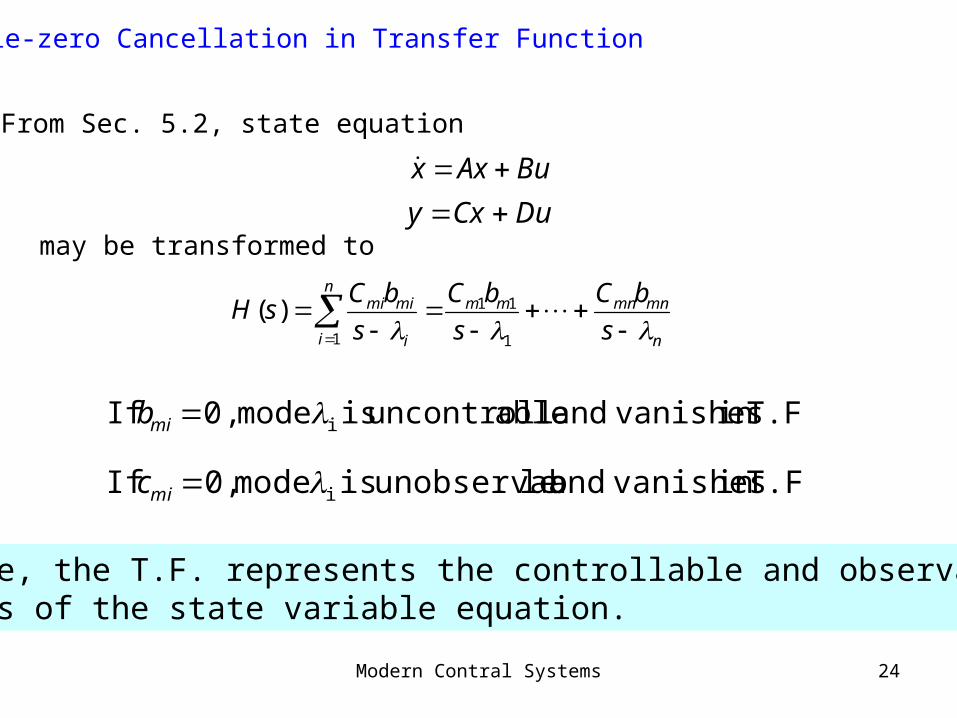
From Sec. 5.2, state equation
Hence, the T.F. represents the controllable and observableparts of the state variable equation.
may be transformed to
BuAxx
DuCxy
T.F.. in vanishesand ableuncontroll is mode , 0 If imib
T.F.. in vanishesand leunobservab is mode 0, If imic
Pole-zero Cancellation in Transfer Function
Modern Contral Systems 25
BAsICsHsU
sY 1)()(
)(
4
1
2
2210
42
1
1
2
41
0210
42
1
s
s
s
ss
s
s
ss
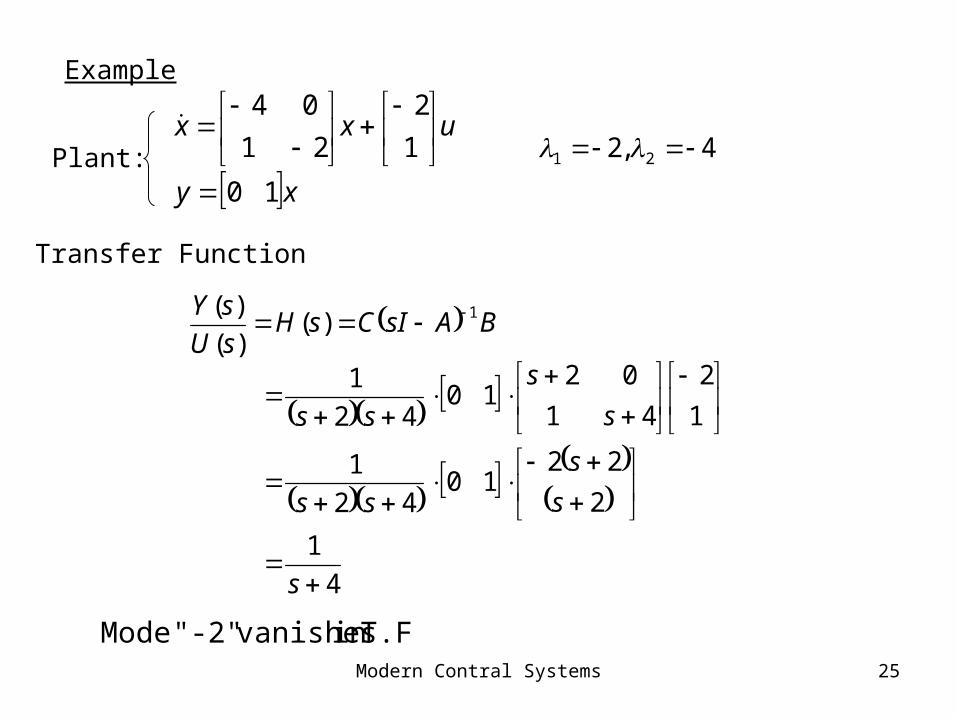
4,2 21
Example
xy
uxx
10
1
2
21
04
Transfer Function
T.F.. in vanishes"-2" Mode
Plant:

Modern Contral Systems 26
uxx
1
2
11
60
xy 10
3
1)(
)(
)( 1
sBAsICsT
sU
sY
Example 5.6
Plant:
Transfer Function
T.F.. in vanishes"2" Mode
-3,2 21

Modern Contral Systems 27
Minimum Realization
Realization: Realize a transfer function via a state space equation.
3
1)(
)(
)(
ssT
sU
sY
2
2
3
1)(
)(
)(
s
s
ssT
sU
sY
1 1)(sU )(sY
3
1 1)(sU )(sY-1s
3
2
-1s
-1s1
ExampleRealization of the T.F.
3
1)(
ssT
Method 1:
Method 2:
※There is infinity number of realizations for a given T.F. .
Modern Contral Systems 28
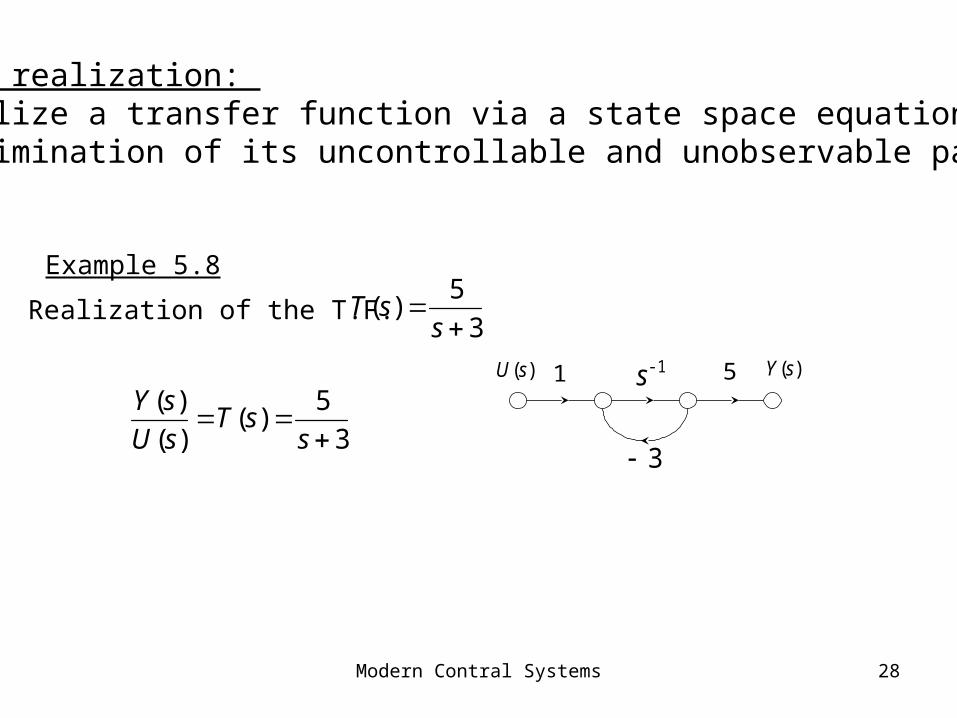
Minimum realization: Realize a transfer function via a state space equation with elimination of its uncontrollable and unobservable parts.
3
5)(
)(
)(
ssT
sU
sY1 5)(sU )(sY
3
-1s
Example 5.8
Realization of the T.F.3
5)(
ssT