modeling supermarket refrigeration systems for smart grid...
TRANSCRIPT

Modeling Supermarket Refrigeration Systemsfor Smart Grid Control
Seyed Ehsan Shafiei
Automation and ControlDepartment of Electronic Systems
Aalborg [email protected]
June 11, 2012

30
Modeling Sup. Ref.Sys. for Smart Grid
Seyed Ehsan Shafiei
2 Introduction
Booster Configuration
ModelingDisplay cases
Suction manifold
Condenser
System model
Simulations
Simulations
Automation & ControlElectronic SystemsAalborg University
The main idea
X Shifting cooling functionI from day to night hoursI from high price to low price hoursI to take part in balancing the grid
X Employing the heat capacity of food stuffs to store energy ascoldness
30
Modeling Sup. Ref.Sys. for Smart Grid
Seyed Ehsan Shafiei
3 Introduction
Booster Configuration
ModelingDisplay cases
Suction manifold
Condenser
System model
Simulations
Simulations
Automation & ControlElectronic SystemsAalborg University
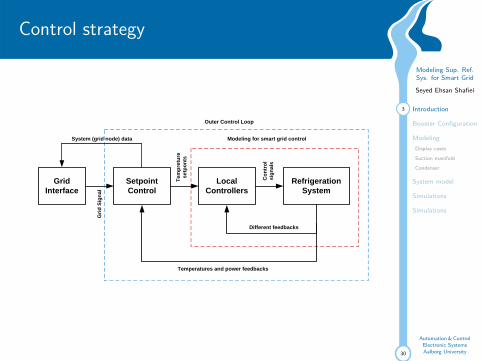
Control strategy
Decentralized Production Units
Distributers(Other Interfaces)
Grid Controller(s)
Aggregators(Service Providers)
Intelligent Consumers
MajorUnits Controvertible
Units
RefrigerationSystem
Local Controllers
SetpointControl
GridInterface
Different feedbacks
Temperatures and power feedbacks
System (grid node) data
Outer Control Loop
Gri
d S
ign
al
Te
mp
retu
re
setp
on
ts
Co
ntr
ol
sig
nal
s
Modeling for smart grid control

30
Modeling Sup. Ref.Sys. for Smart Grid
Seyed Ehsan Shafiei
4 Introduction
Booster Configuration
ModelingDisplay cases
Suction manifold
Condenser
System model
Simulations
Simulations
Automation & ControlElectronic SystemsAalborg University
Acknowledgement
I ESO2 project
“ESO2 Optimization of Supermarket Refrigeration Systems”
Lars Norbert Petersen, Henrik Madsenand Christian Heerup
I Danfoss

30
Modeling Sup. Ref.Sys. for Smart Grid
Seyed Ehsan Shafiei
Introduction
5 Booster Configuration
ModelingDisplay cases
Suction manifold
Condenser
System model
Simulations
Simulations
Automation & ControlElectronic SystemsAalborg University
A typical CO2 booster configuration
Mathematically, the optimal high side pressure PH can be obtainedby solving the following differential equation:
@COP@PH
¼ 0 ð2Þ
To solve Eq. (2), Eq. (1) is rearranged as:
COP ¼ yðh9 � h8Þ þ ð1� yÞðh11 � h10Þh1�h151�x
� �þ ð1� yÞðh12 � h11Þ
ð3Þ
Let,
F1 ¼ yðh9 � h8Þ þ ð1� yÞðh11 � h10Þ ð4Þand,
F2 ¼ ð1� yÞðh12 � h11Þ ð5Þthen,
COP ¼ F1
h1�h151�x
� �þ F2
ð6Þ
Therefore, Eq. (2) is derived as:
@COP@PH
¼@F1@PH
h1�h151�x
� �þ F2
h i� F1
@ h1�h15@PHð Þ@PH
þ @F2@PH
h ih1�h151�x
� �þ F2
h i2 ¼ 0 ð7Þ
Since both F1 and F2 are independent of PH, both@F1@PH
and @F2@PH
equalto zero. Therefore, Eq. (7) can be simplified as:
@ h1�h151�x
� �@PH
¼@ h1s�h15
ð1�xÞgis
h i@PH
¼ 0 ð8Þ
where the isentropic efficiency gis of the high stage compressor canbe calculated as:
gis ¼h1s � h15
h1 � h15¼ A� B� Rp ¼ A 1� B
A� Rp
� �
¼ Að1� Rab � RpÞ ð9Þwhere Rab ¼ B
A.Accordingly, Eq. (8) can therefore be rearranged as:
@ h1s�h15ð1�xÞ�ð1�RabRpÞ
h i@PH
¼ 0 ð10Þ
1.0
10.0
0 100 200 300 400 500 600 700
Pres
sure
(MPa
)
Enthalpy (kJ/kg)
123
47
8
5
10
12
11
614
139 15
1s
Fig. 2. P–H diagram of transcritical cycle in the CO2 booster system.
Gas cooler /Condenser
MT Evaporator
LT Evaporator
TEV_LT
TEV_MT
CV_HP
BPV_2
BPV_1
SHX
REC
COMP_LO
COMP_HI_
12
3
4
7 8
5 6
10
9
11
12
13
14
15
Fig. 1. A typical CO2 booster system applied in supermarket refrigeration system.
1870 Y.T. Ge, S.A. Tassou / Energy Conversion and Management 52 (2011) 1868–1875
[Y.T. Ge, S.A. Tassou, 2011, “Thermodynamic analysis of transcriticalCO2 booster refrigeration systems”]

30
Modeling Sup. Ref.Sys. for Smart Grid
Seyed Ehsan Shafiei
Introduction
6 Booster Configuration
ModelingDisplay cases
Suction manifold
Condenser
System model
Simulations
Simulations
Automation & ControlElectronic SystemsAalborg University
P–H diagram of transcritical cycle
Mathematically, the optimal high side pressure PH can be obtainedby solving the following differential equation:
@COP@PH
¼ 0 ð2Þ
To solve Eq. (2), Eq. (1) is rearranged as:
COP ¼ yðh9 � h8Þ þ ð1� yÞðh11 � h10Þh1�h151�x
� �þ ð1� yÞðh12 � h11Þ
ð3Þ
Let,
F1 ¼ yðh9 � h8Þ þ ð1� yÞðh11 � h10Þ ð4Þand,
F2 ¼ ð1� yÞðh12 � h11Þ ð5Þthen,
COP ¼ F1
h1�h151�x
� �þ F2
ð6Þ
Therefore, Eq. (2) is derived as:
@COP@PH
¼@F1@PH
h1�h151�x
� �þ F2
h i� F1
@ h1�h15@PHð Þ@PH
þ @F2@PH
h ih1�h151�x
� �þ F2
h i2 ¼ 0 ð7Þ
Since both F1 and F2 are independent of PH, both@F1@PH
and @F2@PH
equalto zero. Therefore, Eq. (7) can be simplified as:
@ h1�h151�x
� �@PH
¼@ h1s�h15
ð1�xÞgis
h i@PH
¼ 0 ð8Þ
where the isentropic efficiency gis of the high stage compressor canbe calculated as:
gis ¼h1s � h15
h1 � h15¼ A� B� Rp ¼ A 1� B
A� Rp
� �
¼ Að1� Rab � RpÞ ð9Þwhere Rab ¼ B
A.Accordingly, Eq. (8) can therefore be rearranged as:
@ h1s�h15ð1�xÞ�ð1�RabRpÞ
h i@PH
¼ 0 ð10Þ
1.0
10.0
0 100 200 300 400 500 600 700
Pres
sure
(MPa
)
Enthalpy (kJ/kg)
123
47
8
5
10
12
11
614
139 15
1s
Fig. 2. P–H diagram of transcritical cycle in the CO2 booster system.
Gas cooler /Condenser
MT Evaporator
LT Evaporator
TEV_LT
TEV_MT
CV_HP
BPV_2
BPV_1
SHX
REC
COMP_LO
COMP_HI_
12
3
4
7 8
5 6
10
9
11
12
13
14
15
Fig. 1. A typical CO2 booster system applied in supermarket refrigeration system.
1870 Y.T. Ge, S.A. Tassou / Energy Conversion and Management 52 (2011) 1868–1875
[Y.T. Ge, S.A. Tassou, 2011, “Thermodynamic analysis of transcriticalCO2 booster refrigeration systems”]

30
Modeling Sup. Ref.Sys. for Smart Grid
Seyed Ehsan Shafiei
Introduction
Booster Configuration
7 ModelingDisplay cases
Suction manifold
Condenser
System model
Simulations
Simulations
Automation & ControlElectronic SystemsAalborg University
Modular approach
� Display casesI Dynamical equationsI Gray-Box modelingI Simulation and validation
� Suction manifoldI Dynamical equationsI parameter estimationsI Simulation and validation
� CondenserI Dynamical equationsI parameter estimationsI Simulation and validation

30
Modeling Sup. Ref.Sys. for Smart Grid
Seyed Ehsan Shafiei
Introduction
Booster Configuration
7 ModelingDisplay cases
Suction manifold
Condenser
System model
Simulations
Simulations
Automation & ControlElectronic SystemsAalborg University
Modular approach
� Display casesI Dynamical equationsI Gray-Box modelingI Simulation and validation
� Suction manifoldI Dynamical equationsI parameter estimationsI Simulation and validation
� CondenserI Dynamical equationsI parameter estimationsI Simulation and validation

30
Modeling Sup. Ref.Sys. for Smart Grid
Seyed Ehsan Shafiei
Introduction
Booster Configuration
7 ModelingDisplay cases
Suction manifold
Condenser
System model
Simulations
Simulations
Automation & ControlElectronic SystemsAalborg University
Modular approach
� Display casesI Dynamical equationsI Gray-Box modelingI Simulation and validation
� Suction manifoldI Dynamical equationsI parameter estimationsI Simulation and validation
� CondenserI Dynamical equationsI parameter estimationsI Simulation and validation

30
Modeling Sup. Ref.Sys. for Smart Grid
Seyed Ehsan Shafiei
Introduction
Booster Configuration
Modeling8 Display cases
Suction manifold
Condenser
System model
Simulations
Simulations
Automation & ControlElectronic SystemsAalborg University
Dynamical equations
MfoodsCpfoodsdTfoods
dt = −Qfoodsair
MwallCpwalldTwall
dt = Qairwall − Qe + Qfan
Mair Cpair � MwallCpwall ⇒ Qfoodsair + Qload − Qairwall = 0
Qfoodsair = UAfoodsair (Tfoods − Tair )
Qairwall = UAairwall (Tair − Twall )
Qload = UAload (Tindoor − Tair )

30
Modeling Sup. Ref.Sys. for Smart Grid
Seyed Ehsan Shafiei
Introduction
Booster Configuration
Modeling8 Display cases
Suction manifold
Condenser
System model
Simulations
Simulations
Automation & ControlElectronic SystemsAalborg University
Dynamical equations
MfoodsCpfoodsdTfoods
dt = −Qfoodsair
MwallCpwalldTwall
dt = Qairwall − Qe + Qfan
Mair Cpair � MwallCpwall ⇒ Qfoodsair + Qload − Qairwall = 0
Qfoodsair = UAfoodsair (Tfoods − Tair )
Qairwall = UAairwall (Tair − Twall )
Qload = UAload (Tindoor − Tair )
30
Modeling Sup. Ref.Sys. for Smart Grid
Seyed Ehsan Shafiei
Introduction
Booster Configuration
Modeling9 Display cases
Suction manifold
Condenser
System model
Simulations
Simulations
Automation & ControlElectronic SystemsAalborg University
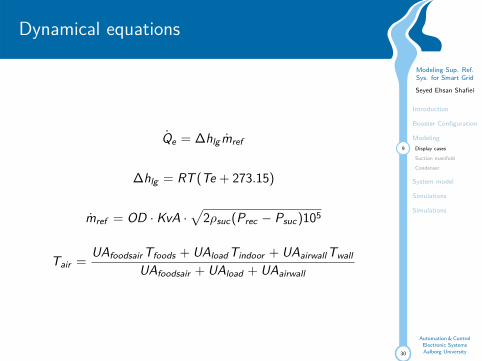
Dynamical equations
Qe = ∆hlgmref
∆hlg = RT (Te + 273.15)
mref = OD · KvA ·√
2ρsuc(Prec − Psuc)105
Tair =UAfoodsair Tfoods + UAloadTindoor + UAairwallTwall
UAfoodsair + UAload + UAairwall
30
Modeling Sup. Ref.Sys. for Smart Grid
Seyed Ehsan Shafiei
Introduction
Booster Configuration
Modeling10 Display cases
Suction manifold
Condenser
System model
Simulations
Simulations
Automation & ControlElectronic SystemsAalborg University
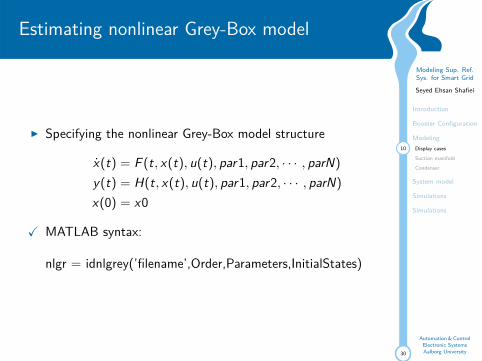
Estimating nonlinear Grey-Box model
I Specifying the nonlinear Grey-Box model structure
x(t) = F (t, x(t), u(t), par1, par2, · · · , parN)
y(t) = H(t, x(t), u(t), par1, par2, · · · , parN)
x(0) = x0
X MATLAB syntax:
nlgr = idnlgrey(’filename’,Order,Parameters,InitialStates)

30
Modeling Sup. Ref.Sys. for Smart Grid
Seyed Ehsan Shafiei
Introduction
Booster Configuration
Modeling11 Display cases
Suction manifold
Condenser
System model
Simulations
Simulations
Automation & ControlElectronic SystemsAalborg University
Estimating nonlinear Grey-Box model
I Prediction error minimization method
θ = argminθ
VN(θ)
VN(θ) =N∑
k=1||ydata(k)− y(k)||2
[Lennart Ljung, 2002, “Prediction error estimation methods”]
X MATLAB syntax:
nlgr = pem(data,nlgr)

30
Modeling Sup. Ref.Sys. for Smart Grid
Seyed Ehsan Shafiei
Introduction
Booster Configuration
Modeling12 Display cases
Suction manifold
Condenser
System model
Simulations
Simulations
Automation & ControlElectronic SystemsAalborg University
Input-output pair and parameters
I Input-output pair for identification
u =[Psuc Tindoor OD1 · · · ODN
]Ty = [mcr Tair ,1 Twall,1 Tfoods,1 · · · Tair ,N Twall,N Tfoods,N ]T
I predefined parametersPrec = 38, Cpwall = 385, Cpfoods = 1000 (The same as ESO2report)
I To be estimated parametersUAload , UAairwall , UAfoodsair , Mwall , Mfoods , Qfan, KvA

30
Modeling Sup. Ref.Sys. for Smart Grid
Seyed Ehsan Shafiei
Introduction
Booster Configuration
Modeling13 Display cases
Suction manifold
Condenser
System model
Simulations
Simulations
Automation & ControlElectronic SystemsAalborg University
Estimation results
UAload =
21.4838.90
3121.4829.1614.638.02
UAairwall =
471.77835.55579.03363.42488.90345.95278.77
UAfoodsair =
84.14141.71146.96174.60351.6958.1895.87
Mwall =
209.06451.38401.14299.31161.19159.27262.23
Mfoods =
2316.46450.4
13364.619112
97939907.45133.4
Qfan =
251.24231.05804.85
5.200.00
436.223.89
KvA = [0.89 1.60 1.50 1.10 2.18 0.57 0.83]× 10−6

30
Modeling Sup. Ref.Sys. for Smart Grid
Seyed Ehsan Shafiei
Introduction
Booster Configuration
Modeling14 Display cases
Suction manifold
Condenser
System model
Simulations
Simulations
Automation & ControlElectronic SystemsAalborg University
Estimation results (training data)
02468
Tai
r,1
MeasurementError: 0.71
−20246
Tai
r,2
MeasurementError: 0.86
−202468
Tai
r,3
MeasurementError: 0.71
024
Tai
r,4
MeasurementError: 0.78
−20246
Tai
r,5
MeasurementError: 1.2
02468
Tai
r,6
MeasurementError: 0.92
1 61 121 181 241 301−1
01
Tai
r,7
MeasurementError: 0.2

30
Modeling Sup. Ref.Sys. for Smart Grid
Seyed Ehsan Shafiei
Introduction
Booster Configuration
Modeling15 Display cases
Suction manifold
Condenser
System model
Simulations
Simulations
Automation & ControlElectronic SystemsAalborg University
Estimation results (test data)
−20246
Tai
r,1
MeasurementError: 0.87
−20246
Tai
r,2
MeasurementError: 1
−20246
Tai
r,3
MeasurementError: 1.1
024
Tai
r,4
MeasurementError: 0.87
−2024
Tai
r,5
MeasurementError: 1
02468
Tai
r,6
MeasurementError: 1
1 61 121 181 241 301−0.50
0.511.5
Tai
r,7
MeasurementError: 0.18

30
Modeling Sup. Ref.Sys. for Smart Grid
Seyed Ehsan Shafiei
Introduction
Booster Configuration
ModelingDisplay cases
16 Suction manifold
Condenser
System model
Simulations
Simulations
Automation & ControlElectronic SystemsAalborg University
Suction manifold dynamical equations
dPsucdt =
mcr + mdist − Vcompρsuc
VsucdρsucdPsuc
Vcomp =cap100 · ηvol · Vd
Wcomp =1
ηcompVcompρsuc(hic − hoe)
hic = hoe +1ηis
(his − hoe)
Vd = 6.5× 70/50 + 120, Vsuc = 2, ηvol =?, ηis =?, ηcomp =?

30
Modeling Sup. Ref.Sys. for Smart Grid
Seyed Ehsan Shafiei
Introduction
Booster Configuration
ModelingDisplay cases
17 Suction manifold
Condenser
System model
Simulations
Simulations
Automation & ControlElectronic SystemsAalborg University
Estimating compressor parameters
50 100 150 200 250 300
2
4
6
8
10
12
14
Wcom
p[K
W]
dWcompdWcomp
est
ηvol = 0.535, ηis = 0.836, and ηcomp = 0.465

30
Modeling Sup. Ref.Sys. for Smart Grid
Seyed Ehsan Shafiei
Introduction
Booster Configuration
ModelingDisplay cases
18 Suction manifold
Condenser
System model
Simulations
Simulations
Automation & ControlElectronic SystemsAalborg University
Suction manifold simulation
25
26
27
28
Psu
c
Psuc
Psucest
50 100 150 200 250 3002
4
6
8
10
12
Wcom
p[K
W]
dWcomp
dWcompest
u =[Pc mref cap
]T and y =[Psuc Wcomp
]T
30
Modeling Sup. Ref.Sys. for Smart Grid
Seyed Ehsan Shafiei
Introduction
Booster Configuration
ModelingDisplay cases
Suction manifold
19 Condenser
System model
Simulations
Simulations
Automation & ControlElectronic SystemsAalborg University
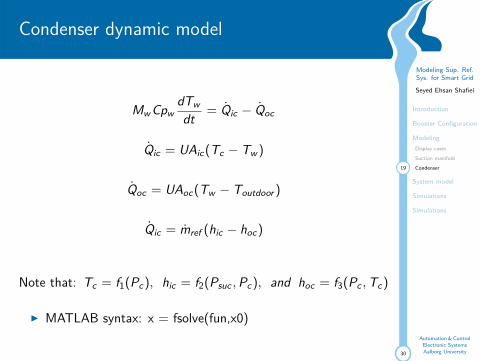
Condenser dynamic model
Mw CpwdTwdt = Qic − Qoc
Qic = UAic(Tc − Tw )
Qoc = UAoc(Tw − Toutdoor )
Qic = mref (hic − hoc)
Note that: Tc = f1(Pc), hic = f2(Psuc ,Pc), and hoc = f3(Pc ,Tc)
I MATLAB syntax: x = fsolve(fun,x0)

30
Modeling Sup. Ref.Sys. for Smart Grid
Seyed Ehsan Shafiei
Introduction
Booster Configuration
ModelingDisplay cases
Suction manifold
20 Condenser
System model
Simulations
Simulations
Automation & ControlElectronic SystemsAalborg University
Condenser simulation
50 100 150 200 250 300
44
46
48
50
52
54
56
Pc
Pc
Pcest
u =[mref Toutdoor Psuc
]T and y = Pc
30
Modeling Sup. Ref.Sys. for Smart Grid
Seyed Ehsan Shafiei
Introduction
Booster Configuration
ModelingDisplay cases
Suction manifold
Condenser
21 System model
Simulations
Simulations
Automation & ControlElectronic SystemsAalborg University
Simulation setup
I Inputs and disturbances from real data
u =
OD1...
OD7
d =
[mdist
Toutdoor
]
I Compressor control
Requested Capacity(%) = 100 · Vcomp/(ηvolVd )
Running Capacity = Requested Capacity

30
Modeling Sup. Ref.Sys. for Smart Grid
Seyed Ehsan Shafiei
Introduction
Booster Configuration
ModelingDisplay cases
Suction manifold
Condenser
22 System model
Simulations
Simulations
Automation & ControlElectronic SystemsAalborg University
Modeling results
50 100 150 200 250 300−2
0246
Tcr
1
MeasurementsModel
50 100 150 200 250 300−2
0246
Tcr
2
MeasurementsModel
50 100 150 200 250 300−2
0246
Tcr
3
MeasurementsModel
50 100 150 200 250 300−2
024
Tcr
4
MeasurementsModel
50 100 150 200 250 300−4−2
024
Tcr
5
MeasurementsModel
50 100 150 200 250 30002468
Tcr
6
MeasurementsModel
50 100 150 200 250 300−0.5
00.5
11.5
Tcr
7
MeasurementsModel

30
Modeling Sup. Ref.Sys. for Smart Grid
Seyed Ehsan Shafiei
Introduction
Booster Configuration
ModelingDisplay cases
Suction manifold
Condenser
23 System model
Simulations
Simulations
Automation & ControlElectronic SystemsAalborg University
Modeling results
50 100 150 200 250 3000
2
4
6
8
10
Wcom
p[K
W]
MeasurementModel

30
Modeling Sup. Ref.Sys. for Smart Grid
Seyed Ehsan Shafiei
Introduction
Booster Configuration
ModelingDisplay cases
Suction manifold
Condenser
System model
24 Simulations
Simulations
Automation & ControlElectronic SystemsAalborg University
Simulation set up
I Time setting
Sampling time = 60 s simulationtime = 2 days
I Solver
ODE45
30
Modeling Sup. Ref.Sys. for Smart Grid
Seyed Ehsan Shafiei
Introduction
Booster Configuration
ModelingDisplay cases
Suction manifold
Condenser
System model
25 Simulations
Simulations
Automation & ControlElectronic SystemsAalborg University
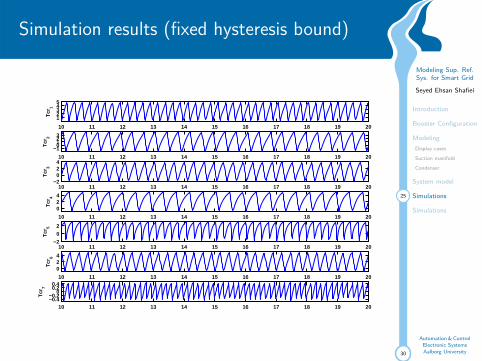
Simulation results (fixed hysteresis bound)
10 11 12 13 14 15 16 17 18 19 20
12345
Tcr
1
10 11 12 13 14 15 16 17 18 19 20
−10123
Tcr
2
10 11 12 13 14 15 16 17 18 19 20−2
024
Tcr
3
10 11 12 13 14 15 16 17 18 19 20
024
Tcr
4
10 11 12 13 14 15 16 17 18 19 20−2
0
2
Tcr
5
10 11 12 13 14 15 16 17 18 19 20
024
Tcr
6
10 11 12 13 14 15 16 17 18 19 20−0.4−0.2
00.20.4
Tcr
7

30
Modeling Sup. Ref.Sys. for Smart Grid
Seyed Ehsan Shafiei
Introduction
Booster Configuration
ModelingDisplay cases
Suction manifold
Condenser
System model
26 Simulations
Simulations
Automation & ControlElectronic SystemsAalborg University
Simulation results (fixed hysteresis bound)
10 11 12 13 14 15 16 17 18 19 200
0.5
1
OD
1
10 11 12 13 14 15 16 17 18 19 200
0.5
1
OD
2
10 11 12 13 14 15 16 17 18 19 200
0.5
1
OD
3
10 11 12 13 14 15 16 17 18 19 200
0.5
1
OD
4
10 11 12 13 14 15 16 17 18 19 200
0.5
1
OD
5
10 11 12 13 14 15 16 17 18 19 200
0.5
1
OD
6
10 11 12 13 14 15 16 17 18 19 200
0.5
1
OD
7

30
Modeling Sup. Ref.Sys. for Smart Grid
Seyed Ehsan Shafiei
Introduction
Booster Configuration
ModelingDisplay cases
Suction manifold
Condenser
System model
27 Simulations
Simulations
Automation & ControlElectronic SystemsAalborg University
Simulation results (fixed hysteresis bound)
0 5 10 15 20 25 30 35 40 452
4
6
8
10
12
14
16
Wcom
p[K
W]
0 5 10 15 20 25 30 35 40 454
6
8
10
12
14
16
To
utd
oo
r

30
Modeling Sup. Ref.Sys. for Smart Grid
Seyed Ehsan Shafiei
Introduction
Booster Configuration
ModelingDisplay cases
Suction manifold
Condenser
System model
28 Simulations
Simulations
Automation & ControlElectronic SystemsAalborg University
Simulation results (varying hysteresis bound)
0 5 10 15 205
1015
To
utd
oo
r
0 5 10 15 20
12345
Tcr
1
0 5 10 15 20
024
Tcr
2
0 5 10 15 20−2
02
Tcr
3
0 5 10 15 20024
Tcr
4
0 5 10 15 20−2
02
Tcr
5
0 5 10 15 20024
Tcr
6
0 5 10 15 20−0.4−0.20
0.20.4
Tcr
7

30
Modeling Sup. Ref.Sys. for Smart Grid
Seyed Ehsan Shafiei
Introduction
Booster Configuration
ModelingDisplay cases
Suction manifold
Condenser
System model
29 Simulations
Simulations
Automation & ControlElectronic SystemsAalborg University
Simulation results (varying hysteresis bound)
0 5 10 15 20
4
6
8
10
12
14
16
Wcom
p[K
W]
0 5 10 15 204
6
8
10
12
14
16
To
utd
oo
r

30
Modeling Sup. Ref.Sys. for Smart Grid
Seyed Ehsan Shafiei
Introduction
Booster Configuration
ModelingDisplay cases
Suction manifold
Condenser
System model
Simulations
30 Simulations
Automation & ControlElectronic SystemsAalborg University
Future works
� Improving the modelI Modifying the subsystems and parametersI Modeling freezer roomsI Considering opening and closing hoursI Identifying a model for closing hours
� Using the model toI Estimate available thermal capacityI Develop energy storage model/functionI Define system flexibilityI Investigate different control scenariosI · · ·