modeling of integrated rf passive devicesmodeling of integrated rf passive devices sharad kapur and...
TRANSCRIPT

Modeling of Integrated RF Passive Devices
Sharad Kapur and David E. Long
Integrand Software, Inc.
Berkeley Heights, NJ 07922 USA
http://www.integrandsoftware.com
Abstract—We describe the use of an electromagnetic (EM) sim-ulator for modeling integrated RF components and circuits. Mod-ern EM simulators are fast and accurate enough to provide goodmodels of such components. An important aspect of advancedIC processes is that the physical properties of wires (width,thickness, and resistance) vary depending on the surroundingwiring. We discuss how the EMX simulator [1] handles width-and spacing-dependent properties in the process description.Because the simulator handles mask-ready layout without theneed for manual simplification, it is feasible to simulate thousandsof possible designs and build scalable component models. Suchscalable models allow fast choices of optimal components thatmeet user-supplied specifications.
I. INTRODUCTION
Technology trends have made on-chip passive components
pervasive. Thick metals and high-resistivity substrates lead to
high-quality on-chip inductors, transformers, and baluns. For
example, integrated baluns can now be designed that have
insertion loss comparable to off-chip LTCC or ceramic baluns.
High-density interdigitated (MoM) capacitors are possible
because of fine feature sizes (0.1µm and below) and a large
number of interconnect layers (ten or more). IC processes also
offer tight tolerances, so variability from chip to chip is low.
And of course integration offers cost savings as well. Because
of their increased prevalence, fast and accurate modeling of
integrated passives is important. There are two main aspects
of this modeling:
1) EM simulation to evaluate candidate physical designs,
and possibly to refine the physical design.
2) Converting the EM simulation results into models that
can be used with higher level simulators, e.g., at the
circuit netlist level.
EM simulators fall into two broad categories: those based
on a differential formulation of Maxwell’s equations, and
those based on integral formulations. Examples of the former
include finite difference (both frequency- and time-domain)
and finite element simulators [2]. These offer flexibility, but
have the drawback that dielectrics, including a suitably large
amount of space surrounding the physical conductors, must
be discretized. This is because Maxwell’s equations must be
enforced wherever there is a non-trivial field. Integral (or
boundary element) formulations [3] are typically frequency-
domain, and are most appropriate when the enclosing dielectric
media is largely planar. They require discretization only of the
conductors, not the surrounding dielectrics. For IC passives,
planarity is an excellent approximation. Further, understanding
of how to efficiently implement boundary-element methods
has increased notably with the development of the Fast Mul-
tipole Method and related techniques [4]. Overall, frequency-
domain integral methods are usually the most efficient choice
when they are applicable, and hence are the most appropriate
for simulation of IC passives. We will concentrate on these
methods.
Converting frequency-domain simulation data into a form
suitable for a circuit simulator is a difficult problem in the
general case. However, in the more constrained domain of
modeling basic types of components, there are two basic
approaches. One is to use an optimizer to pick the parameters
of a user-specified circuit topology that is appropriate to the
device. While non-linear optimization in general is difficult, it
works reasonably well for this application. Approaches based
on pole-zero fitting are also workable. Care must be taken to
maintain passivity, but commercial tools are available, both
internally in some circuit simulators [5] or as stand-alone
applications [6]. Either optimization or pole-zero fitting are
appropriate for modeling individual passive components. Opti-
mization also offers the possibility of making scalable models.
A scalable model is parameterized by physical quantities. For
example, a scalable inductor model might be parameterized
by number of turns, diameter, wire width, and turn-to-turn
spacing. A scalable model captures the whole design space
of possible components. Having a scalable model makes it
possible to quickly synthesize an optimal design from a user-
supplied specification by searching the entire design space [7].
II. INTEGRAL FORMULATIONS FOR EM SIMULATION
Planar EM simulators based on integral formulations only
require discretization of the conductors, not the surrounding
dielectrics. All of the dielectric and substrate effects are
implicitly captured in the form of a Green’s function [8]. In the
frequency domain, the stimulus electric field Es at a point r
must match the field arising from ohmic losses, the vector
potential A and the scalar potential φ:
Es(r) =1
σJ(r) + jωA(r) +∇φ(r). (1)
The vector and scalar potentials are obtained by integrat-
ing over the conductors: A(r) =∫GA(r, r
′)J(r′) dr′, and
φ(r) =∫Gφ(r, r
′)ρ(r′)dr′. J is the current density, ρ is the
charge density, GA is the vector potential Green’s function,
and Gφ is the scalar potential Green’s function. For computer
simulation, this continuous equation is discretized by cutting
the conductors up into individual mesh elements, each with an
Custom Integrated Circuits Conference September, 2010

Fig. 1. 3D mesh of a stacked inductor
unknown charge and/or current. The integrals become finite
sums, and the problem can be expressed as a linear system.
Because of the integrals over conductor surfaces, integral
formulations give rise to dense systems of linear equations
after discretization. That is, a bit of current or charge in one
mesh element influences the potentials in all of the other mesh
elements. Dealing with this dense system of equations made
early simulators that used integral formulations comparable
in speed to those that used differential formulations, despite
the fact that the former required only a small number of
discretization elements. Later research in iterative methods for
the solution of linear systems [9] and in techniques for com-
pactly representing the linear systems that arise from integrals
involving potentials [4] dramatically increased the speed of in-
tegral formulation simulators. The techniques pioneered in first
generation fast field solvers from research institutions [10],
[11], [12], [13], [14] have been making their way into com-
mercial tools such as Agilent’s Momentum [15], Ansoft’s
Q3D Extractor [16], and Integrand Software’s EMX [1]. These
tools have added further improvements in speed and memory
efficiency. Additional refinements such as the use of fast direct
solvers are now appearing in academic contexts [17]. Since we
are familiar with the internals of EMX, we will discuss some
of the refinements that it uses [18].
In order to accurately model IC layouts, it is important
to simulate skin-effect and sidewall capacitances correctly.
Especially for MoM capacitors, a “2.5D” approximation using
thin conductors is insufficient. We use a volume integral
formulation that treats conductors and vias as true 3D objects,
as shown in figure 1.
EMX uses a special representation of the vector potential
interactions (normally the most computationally expensive
part of the simulation). The representation allows the vector
potential interactions to be computed with about the same cost
as the scalar interactions. The method depends on decom-
posing the currents into divergence-free and curl-free parts.
The divergence-free parts give the dominant contributions to
the vector potential, and these are captured exactly. The less-
important contributions of the curl-free part are approximated
in a way that is accurate to a bit better than 1%, which suffices
for IC problems.
Typical IC layouts are very regular. Beyond repeated in-
stances of a subcircuit or component, wires tend to be paths
of constant width, the distance between adjacent routing is
typically constant, and most routing is at 90 or 45 degree
angles. Simulators can use regularity to reduce both time and
memory requirements. Figure 2 shows repeated shapes in the
mesh of an inductor that can be exploited.
Fig. 2. Wire mesh with isomorphic shapes shaded
In practice, automation is just as important as simulation
speed and memory efficiency. If getting the layout into a
suitable form for the simulator requires significant hand edit-
ing, the human becomes the bottleneck. Most commercial EM
simulators have interfaces to the major IC design systems, and
they have methods for automating tasks such as via merging.
EMX automatically handles features typical of modern IC
layouts, such as via arrays, context-dependent contacts, and
metal fill and slotting.
III. PATTERN-DEPENDENT EFFECTS
One feature of advanced IC processes is that the physical
width, thickness, and resistance of a wire generally depends
on the surrounding wiring. Sometimes the variations are very
significant. Fabricated widths may vary by up to 50% from
the nominal (drawn) width, and sheet resistance can change
by a factor of two. Such variations are called pattern-dependent
effects. Because these effects can be so large, it is important
to account for them in simulation and modeling.
Some foundries now provide detailed information about
pattern dependencies. This information is usually in the form
of tabulated data, with the tables indexed by wire width and
spacing to adjacent wires. An example is TSMC’s interopera-
ble R(L)C extraction technology file format iRCX [19], [20].
This file format is now used for both static RLC extraction
and high frequency EM simulations.
The process description used by a simulator must include all
of the definitions of material properties (such as dielectrics and
conductivities) and all the cross-section dimensions (layer and
conductor thicknesses). EMX also allows the specification of
conductor properties to include width and spacing dependen-
cies. Internally, the the input (drawn) layout is automatically
modified in order to accurately model the fabricated structure.
Handling pattern-dependent effects requires:
• devising appropriate definitions of the local width and
spacing and developing efficient algorithms for comput-
ing these quantities; and
• manipulating the input geometry as a function of them.
We discuss these steps in the following two subsections.

Fig. 3. Exterior Voronoi diagram of some wiring
A. Computing Width and Spacing
For simple repetitive layout (e.g., multiple parallel wires)
width and spacing have intuitive meanings. However a simu-
lator must handle more complicated situations involving non-
uniform layout. We want definitions that match the intuitive
meanings in regular regions and that lend themselves to effi-
cient computation. For width and spacing, a natural geometric
data structure for representing local distances between objects
is the Voronoi diagram [21].
In the case of layout, the objects of interest are line segments
representing the edges of wires, and points where segments
join. Each segment and point has a region around it that
is closer to that object than to any other object. Following
this idea, the entire plane is partitioned into non-overlapping
regions, and this partitioning is the Voronoi diagram of the
segments and points. Note that part of the Voronoi diagram
lies within the wiring, and the rest lies outside. These two
parts are called the interior and exterior Voronoi diagrams.
A portion of a MoM capacitor layout and the associated
exterior Voronoi diagram is shown in figure 3. The shaded ar-
eas are the wires. Between the wires, there are some segments
which represent the boundaries of the Voronoi regions.1 Also
shown are some maximal inscribed circles. Each such circle
just touches three objects, and the circles cannot be made any
bigger while touching those objects.
The local spacing is taken from the diameter of the appro-
priate maximal inscribed circle that touches the segment and
the nearest other object(s). The local width is calculated in the
same way as the local spacing, except it is based on the interior
Voronoi diagram instead of the exterior one. Local width
and spacing can be calculated at key points throughout the
layout during the Voronoi diagram construction. Afterwards,
the values can be quickly interpolated at any desired location.
B. Mimicing Fabrication Effects
Typically the most significant fabrication effect is that
physical line width differs from the drawn width by a bias
amount which depends on the local width and spacing in the
1Technically, some of the boundaries are parts of parabolas, but computa-tionally it is easier to approximate these parts by segments.
TABLE IEXAMPLE VARIATION OF PHYSICAL WIDTH (MICRONS) AS A FUNCTION OF
DRAWN WIDTH AND SPACING
w\s 0.1000 0.1300 0.1500 0.2000 . . .
0.1000 0.1025 0.1125 0.1220 0.1470 . . .0.1300 0.1265 0.1285 0.1340 0.1525 . . .0.1500 0.1459 0.1459 0.1459 0.1599 . . .0.2000 0.1783 0.1783 0.1783 0.1783 . . .
. . . . . . . . . . . . . . . . . .
Fig. 4. Wires before (gray) and after (outline) bias
layout. The bias is obtained from a table provided by the
foundry. Table I shows an example of how the physical width
of a metal wire depends on the drawn width and spacing. For
example, a 0.1 µm drawn wire at a spacing of 0.2 µm will
physically expand to be 0.147 µm wide. That represents an
increase of almost 50% from the drawn width.
Interpolating in such a table produces a continuous function
for the bias as a function of drawn width and spacing. An
example of a layout before and after such a variable bias
operation is shown in figure 4. Note that the biased geometry
is not rectilinear when the width and spacing are not uniform.
Another significant effect is sheet resistance variation. After
calculating the local width and spacing and the biased geome-
try, the simulator can proceed with mesh generation as normal.
Then at each point in the mesh, the sheet resistance can be
calculated as a function of width and spacing. Each shape in
the mesh may be assigned a sheet resistance by averaging over
the area of the shape. An example of how resistance varies is
shown in table II. Note that the sheet resistance changes by
almost a factor of two as a function of width and spacing.
Figure 5 shows the variation in sheet resistance for a MoM
capacitor.
IV. EXAMPLES
We start with three examples that show the size of problems
that can be handled by a modern EM simulator. The ability
to simulate larger blocks containing multiple components al-
lows modeling more complicated structures where interactions
between components are also taken into account. All these
examples were run using EMX on a machine with eight

TABLE IIEXAMPLE VARIATION OF SHEET RESISTANCE (OHMS/SQUARE) AS A
FUNCTION OF DRAWN WIDTH AND SPACING
w\s 0.1000 0.1300 0.1500 0.2000 . . .
0.1000 0.1399 0.1220 0.1084 0.0839 . . .0.1300 0.1355 0.1316 0.1235 0.1034 . . .0.1500 0.1285 0.1275 0.1266 0.1116 . . .0.2000 0.1315 0.1305 0.1295 0.1286 . . .
. . . . . . . . . . . . . . . . . .
Fig. 5. Variation of sheet resistance in the mesh
2.5 GHz CPUs and 24 GB of memory. The speed-up for eight
CPUs compared to a single CPU depends on the characteristics
of the example and the number of ports, but it can be up to
six. In all of the examples, the input was mask-ready GDSII
layout. No hand-editing or simplification was done for any
of the examples. Wall-clock simulation times for even the
largest example was under two hours, fast enough that EM
simulation can be part of the design process instead of being
used only as a final step during “sign-off.” The maximum
memory requirement was under 10 GB.
A. IC Diplexer
Figure 6 shows an integrated diplexer in a 0.18 µm 5-layer
metal BiCMOS technology. The design contains resistors,
inductors, MiM capacitors, and probe pads. One main issue
for the designers was accounting for all of the couplings
Fig. 6. IC diplexer layout
0 2 4 6 8 10−50
−40
−30
−20
−10
0
GHz
dB
High Band
Measurement
EMX
0 2 4 6 8 10−50
−40
−30
−20
−10
0
GHz
dB
Low Band
Measurement
EMX
Fig. 7. IC diplexer measurements
Fig. 8. Integrated VCO layout
between inductors, and between inductors and interconnect.
Direct simulation of the whole structure ensured that no
significant interactions were missed. Comparisons of the high-
and low-band simulated and measured responses (figure 7)
show excellent agreement.
B. VCO
Figure 8 is an integrated VCO fabricated in a 6-layer
90 nm CMOS technology. It consists of an inductor and a
bank of 66 MiM capacitors that are switchable for tuning.
The inductor here is small, enough so that parasitic coupling
between the inductor and the interconnect and the details
of how the capacitors are hooked up must be considered.
Indeed, a block-by-block model failed to predict the VCO’s
behavior. Simulating the whole structure gave much more
accurate results. The simulated and measured tuning curves
are shown in figure 9.
C. IPD Diplexer
Figure 10 shows another diplexer built in an IPD (Integrated
Passive Device) technology. The design includes resistors,
inductors, and thin-film capacitors, plus the measurement pads.

10 20 30 40 50 609.5
10
10.5
11
11.5
12
Capacitor bank control
Outp
ut fr
equency (
GH
z)
MeasurementEMX
Fig. 9. VCO tuning characteristic measurements
Fig. 10. IPD diplexer layout
EM simulation was an integral part of this design. Starting
from the diplexer specification, an appropriate topology and
approximate component values were chosen. A preliminary
layout included the coils and ports where tuning capacitors
should connect, but the capacitor values were not yet fixed.
EM simulation produced a model that was used in a circuit
simulator and optimizer to pick appropriate capacitor values.
A final EM simulation confirmed that the device should
meet specifications, just as subsequent measurements proved.
Figure 11 compares simulations and measurements for the IPD
diplexer.
D. Pattern-Dependent Effects
Here we show the significance of pattern-dependent effects
by comparing simulations and measurements for MoM capac-
itors and stacked inductors. The technology is TSMC’s 65 nm
9-metal process, and the width and spacing dependencies are
given by an iRCX file.
The MoM capacitors vary in the number of metals used, the
widths of the metal fingers, and the spacings between fingers.
For this 65 nm technology the minimum width and minimum
spacing are both 0.1 µm. A mesh of one of the MoM capacitors
is shown in figure 12.
We did two sets of simulations: once with the wire proper-
ties fixed at their minimum-width, minimum-spacing values
(no iRCX), and once with the full iRCX information that
allowed EMX to mimic the fabricated layout. Figure III shows
the measured and simulated (low frequency) capacitance val-
0 2 4 6 8 10−50
−40
−30
−20
−10
0
GHz
dB
Low band
Meas
EMX
0 2 4 6 8 10−50
−40
−30
−20
−10
0
GHz
dB
High band
Meas
EMX
Fig. 11. IPD diplexer measurements
Fig. 12. Mesh of a MoM capacitor
ues for these MoM capacitors. For capacitors with minimum
width and minimum spacing, both simulations provided ex-
cellent agreement with measurements. However, for MOM36
with width 0.1 µm and spacing 0.16 µm there is a 0.2% error
when the iRCX file is used and a 13% error when it is not.
This ties in with the iRCX table in table I, which shows that
the bias is most significant for wires that have increased width
or spacing.
Figures 13 and 14 show the high-frequency characteristics
of the capacitors. For MOM06, with minimum width and
spacing, both iRCX and non-iRCX simulations agree well with
TABLE IIIMEASURED AND SIMULATED MOM CAPACITOR VALUES AT VARIOUS
WIDTHS AND SPACINGS OF FINGERS
cell meas iRCX no iRCXw, s µm pF pF %err pF %err
MOM060.1, 0.1 0.611 0.617 0.9 0.614 0.5
MOM670.16, 0.16 0.293 0.295 0.7 0.300 2.4
MOM270.1, 0.16 0.061 0.061 0.3 0.053 -13.1
MOM360.1, 0.16 0.682 0.680 -0.2 0.591 -13.3

0 5 10 150.5
1
1.5C
pF
0 5 10 150
100
200
300
400Q
0 5 10 150.5
1
1.5R
Oh
ms
GHz
Capacitor MOM06: w=0.1, s=0.1
0 5 10 1510
−3
10−2
10−1
Y
1/O
hm
s
GHz
Meas
EMX iRCX
EMX no iRCX
Fig. 13. Comparison of MoM capacitor simulation to measurement for acapacitor using minimum width and spacing
0 5 10 150.5
1
1.5C
pF
0 5 10 150
50
100Q
0 5 10 152
3
4
5R
Oh
ms
GHz
Capacitor MOM36: w=0.1, s=0.16
0 5 10 1510
−4
10−2
100
Y
1/O
hm
s
GHz
Meas
EMX iRCX
EMX no iRCX
Fig. 14. Comparison of MoM capacitor simulation to measurement for acapacitor using non-minimum width and spacing
measurements. However, for MOM36 the iRCX simulation has
excellent agreement while the and non-iRCX simulations has
a large discrepancy in C and Q.
We also simulated a stacked inductor. The inductor winds
from metal 5 through metal 9, and includes two thin metals as
well as the two thicker ones. The Q of the inductor depends
significantly on the resistance in the thin metals, and this
resistance varies as a function of metal width and the spacing
to nearby wires. This is exactly the effect seen in measurement
(figure 15). Again, the simulation taking width and spacing
dependence into account is significantly more accurate.
E. Balun Modeling and Synthesis
Now we discuss the production of a scalable model that is
suitable for synthesis of optimal components. As an example,
we consider on-chip baluns.
We start with a transformer layout generator whose inputs
are turns ratio, number of turns, trace width and coil diameter.
In the first step, we used EM simulator to characterize the
range of about 1000 possible transformer layouts. Thanks to
the simulators efficiency and automated layout handling, it
required only a day to cover the full possible design space:
wire width of 4 to 10µm, 2 through 5 turns, a turns ratio of
1:1 through 1:4, and a diameter of 50 to 400µm.
0 5 10 15 202
3
4
5
6L
nH
0 5 10 15 200
1
2
3
4Q
0 1 2 3 420
25
30R
Oh
ms
GHz
Stacked inductor
0 5 10 15 200
500
1000Z
GHz
Meas
EMX iRCX
EMX no IRCX
Fig. 15. Comparison of stacked inductor simulation to measurement
In the next step, we use optimization to create an accu-
rate scalable model parameterized by these same physical
design parameters. The topology for the scalable model was
derived from physical intuition and is shown in Figure 16.
The schematic shows a center-tapped pair of coils. Each coil
includes additional resistors and inductors for modeling skin-
effect. A combination of resistors and capacitors is used to
model the substrate.
P1 S1
S2P2
SCT
Fig. 16. Scalable model schematic
Each element in the model has a value that is a non-linear
function of the geometric parameters. The specific forms of
these functions are chosen based on physical intuition. For
example, the main series resistance in each coil is proportional
to the diameter and inversely proportional to the width. The
fitting coefficients within the functions are determined by a
non-linear least squares optimizer. A playback was done of
the model compared to the individual EM simulations, and
the model was verified to match within a few percent for
derived quantities like inductance, k, Q, etc. For example, the
histogram of Figure 17 shows the percentage error in primary
inductance L1, secondary inductance L2, and k across the
design space. The optimizer took a few hours to build the
scalable model.
Given the scalable model of the transformer, simulation
0 1 2 3 40
100
200
300
400
500
600
700
800
900
L1 L2
k
Percent error
Nu
mb
er
of
insta
nce
s
Fig. 17. Comparison of model to simulations
of the performance of any particular balun (including the
tuning capacitors) takes only a fraction of a second. This
means that an exhaustive examination of the entire design
space can be done in under a minute. Constraints may be
placed on any combination of area, insertion loss, return loss
(matching), phase imbalance or amplitude imbalance. The
entire bandwidth of interest can be checked, and the desired
input and output impedances can also be specified during the
search. While the EM simulation and the construction of the
scalable model is time-consuming, the actual synthesis of any
given balun is very quick. Such scalable models derived from
EM simulations and linked with optimal synthesis capabilities
are now provided by some foundries as part of their design
kits for components like inductors, capacitors, transformers,
and baluns.
This method was used to design four baluns for common
applications: 802.11A, 802.11B, DCS and GSM. A standard
single-ended impedance of 50Ω and a differential output
impedance of 200Ω were chosen for demonstration. The
baluns were fabricated in UMC’s 90nm, 9-level IC process.
3µm copper was used for the coil, and thinner metals were
stacked to form the underpasses. Tuning MIM capacitors of
2fF/µm2 were used. In all the layouts, coil area dominated
capacitor area. A chip photograph of one of the fabricated
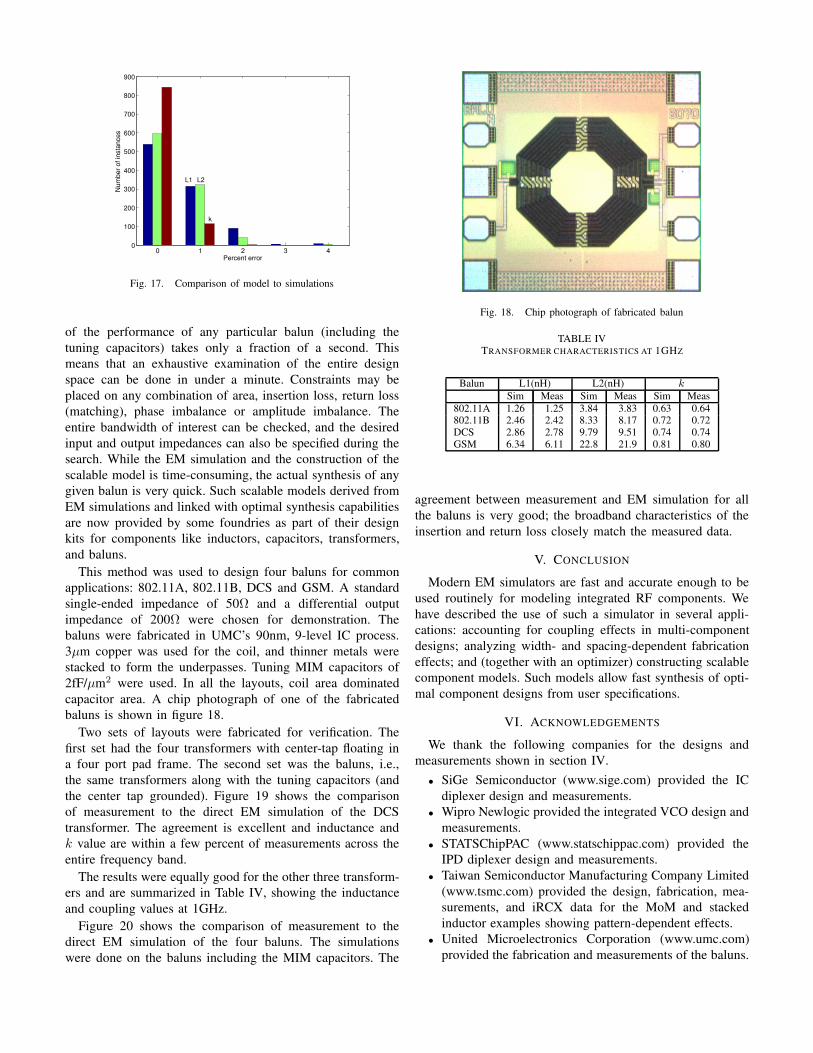
baluns is shown in figure 18.
Two sets of layouts were fabricated for verification. The
first set had the four transformers with center-tap floating in
a four port pad frame. The second set was the baluns, i.e.,
the same transformers along with the tuning capacitors (and
the center tap grounded). Figure 19 shows the comparison
of measurement to the direct EM simulation of the DCS
transformer. The agreement is excellent and inductance and
k value are within a few percent of measurements across the
entire frequency band.
The results were equally good for the other three transform-
ers and are summarized in Table IV, showing the inductance
and coupling values at 1GHz.
Figure 20 shows the comparison of measurement to the
direct EM simulation of the four baluns. The simulations
were done on the baluns including the MIM capacitors. The
Fig. 18. Chip photograph of fabricated balun
TABLE IVTRANSFORMER CHARACTERISTICS AT 1GHZ
Balun L1(nH) L2(nH) k
Sim Meas Sim Meas Sim Meas
802.11A 1.26 1.25 3.84 3.83 0.63 0.64802.11B 2.46 2.42 8.33 8.17 0.72 0.72DCS 2.86 2.78 9.79 9.51 0.74 0.74GSM 6.34 6.11 22.8 21.9 0.81 0.80
agreement between measurement and EM simulation for all
the baluns is very good; the broadband characteristics of the
insertion and return loss closely match the measured data.
V. CONCLUSION
Modern EM simulators are fast and accurate enough to be
used routinely for modeling integrated RF components. We
have described the use of such a simulator in several appli-
cations: accounting for coupling effects in multi-component
designs; analyzing width- and spacing-dependent fabrication
effects; and (together with an optimizer) constructing scalable
component models. Such models allow fast synthesis of opti-
mal component designs from user specifications.
VI. ACKNOWLEDGEMENTS
We thank the following companies for the designs and
measurements shown in section IV.
• SiGe Semiconductor (www.sige.com) provided the IC
diplexer design and measurements.
• Wipro Newlogic provided the integrated VCO design and
measurements.
• STATSChipPAC (www.statschippac.com) provided the
IPD diplexer design and measurements.
• Taiwan Semiconductor Manufacturing Company Limited
(www.tsmc.com) provided the design, fabrication, mea-
surements, and iRCX data for the MoM and stacked
inductor examples showing pattern-dependent effects.
• United Microelectronics Corporation (www.umc.com)
provided the fabrication and measurements of the baluns.

0 1 2 3 4−60
−40
−20
0
20
40
60
GhZ
nH
L1 and L2
L1
L2
0 1 2 3 4−1
−0.5
0
0.5
1
1.5
GhZ
k
k=L12/sqrt(L1*L2)
0 1 2 3 4−10
−5
0
5
10
GhZ
Q1 and Q2
Q1
Q2
EMX
Meas
Fig. 19. Inductance, k, and Q of the DCS transformer: simulation vs measurement
2 4 6 8 10−35
−30
−25
−20
−15
−10
−5
GHz
802.11A
dB
RL
IL
2 4 6 8−35
−30
−25
−20
−15
−10
−5
GHz
802.11B
1 2 3 4 5 6
−35
−30
−25
−20
−15
−10
−5
GHz
DCS
1 2 3 4
−35
−30
−25
−20
−15
−10
−5
GHz
GSM
EMX IL
EMX RL
Meas IL
Meas RL
Fig. 20. Insertion loss (IL) and return loss (RL) of baluns: simulation vs measurement
REFERENCES
[1] EMX User’s Manual, Integrand Software, Inc., 2010.[2] R. Garg, Analytical and Computational Methods in Electromagnetics.
Artech House, 2008.[3] J. J. H. Wang, Generalized Moment Methods in Electromagnetics.
Wiley, 1991.[4] L. Greengard and V. Rokhlin, “A new version of the fast multipole
method for the Laplace equation in three dimensions,” Acta Numerica,vol. 6, pp. 229–269, 1997.
[5] Spectre Circuit Simulator User Guide, Cadence Design Systems, Inc.,2009.
[6] Sigrity, “Broadband SPICE,” http://www.sigrity.com.[7] S. Kapur, D. E. Long, R. C. Frye, Y.-C. Chen, M.-H. Cho, H.-W. Chang,
J.-H. Ou, and B. Hung, “Synthesis of optimal on-chip baluns,” in Proc.
Custom Integrated Circuits Conf., 2007, pp. 507–510.[8] W. C. Chew, Waves and Fields in Inhomogeneous Media. IEEE Press,
1995.[9] R. Barrett et al., Templates for the Solution of Linear Systems. SIAM,
1994.[10] S. Kapur and D. E. Long, “Large-scale capacitance calculation,” in Proc.
37th Design Automation Conf., Jun. 2000, pp. 744–749.[11] S. Kapur, D. E. Long, and J. Zhao, “Efficient full-wave simulation in
layered, lossy media,” in Proc. Custom Integrated Circuits Conf., May1998, pp. 211–214.
[12] K. Nabors and J. K. White, “FastCap: A multipole accelerated 3-Dcapacitance extraction program,” IEEE Trans. on CAD, vol. 10, no. 11,pp. 1447–1459, Nov. 1991.
[13] J. R. Phillips and J. K. White, “A precorrected-FFT method for elec-trostatic analysis of complicated 3-D structures,” IEEE Trans. on CAD,vol. 16, no. 10, pp. 1059–1072, Oct. 1997.
[14] Z. Zhu, B. Song, and J. K. White, “Algorithms in FastImp: A fast andwideband impedance extraction program for complicated 3-D geome-tries,” in Proc. 40th Design Automation Conf., 2003, pp. 712–717.
[15] Momentum – ADS 2009, Agilent Technologies, 2009,http://edocs.soco.agilent.com/display/ads2009/Momentum.
[16] “Q3D extractor,” Ansys, Inc., 2009, http://www.ansoft.com/products/si/q3d extractor.
[17] W. Chai, D. Jiao, and C.-K. Koh, “A direct integral-equation solverof linear complexity for large-scale 3d capacitance and impedanceextraction,” in Proc. 46th Design Automation Conf., 2009, pp. 752–757.
[18] S. Kapur and D. E. Long, “Large-scale full-wave simulation,” in Proc.
41st Design Automation Conf., 2004, pp. 806–809.[19] iRCX Unified Technology File Format Usage, TSMC, 2008, verion 1.4.[20] T-N65-CL-SP-009-I1 65nm iRCX file at http://online.tsmc.com, TSMC,
2008.[21] T. Imai, “A topology-oriented algorithm for the Voronoi diagram of poly-
gons,” in Proc. 8th Canadian Conference on Computational Geometry,1996, pp. 107–112.