modeling • bee colonies - carleton...
TRANSCRIPT

Summary
• Introduction to swarm– Definitions by Beni, Bonabeau– Examples– Essential characteristics … repeated– Differences compared to symbolic AI
• Modeling• Bee Colonies

Speculations …• Rate of egg laying and pollen collection may be self-
regulated• Preferential removal of honey and pollen as function of
nearby brood suggests positive feedback• Amount of brood on comb increases, rate of honey
removal and pollen removal nearby increases– Provides more cells for queen– Eventually, egg laying rate will maximize at some point– Will regulate the size of the pollen storage area
• Simulation at http://beelab.case.psu.edu

Cellular Automaton (CA) Model
• Empty Cells– Can receive egg, pollen or honey (or be empty)– If threshold # of neighboring cells contain brood, then
cell will get an egg with probability, Pb. – Pb = f(egg laying rate and empty cell discovery rate)– If cell does not receive an egg, probabilities of
receiving honey and pollen are Ph and Pp (or empty Pe)– Probabilities are a function of foraging rate, nothing
else
CA Model
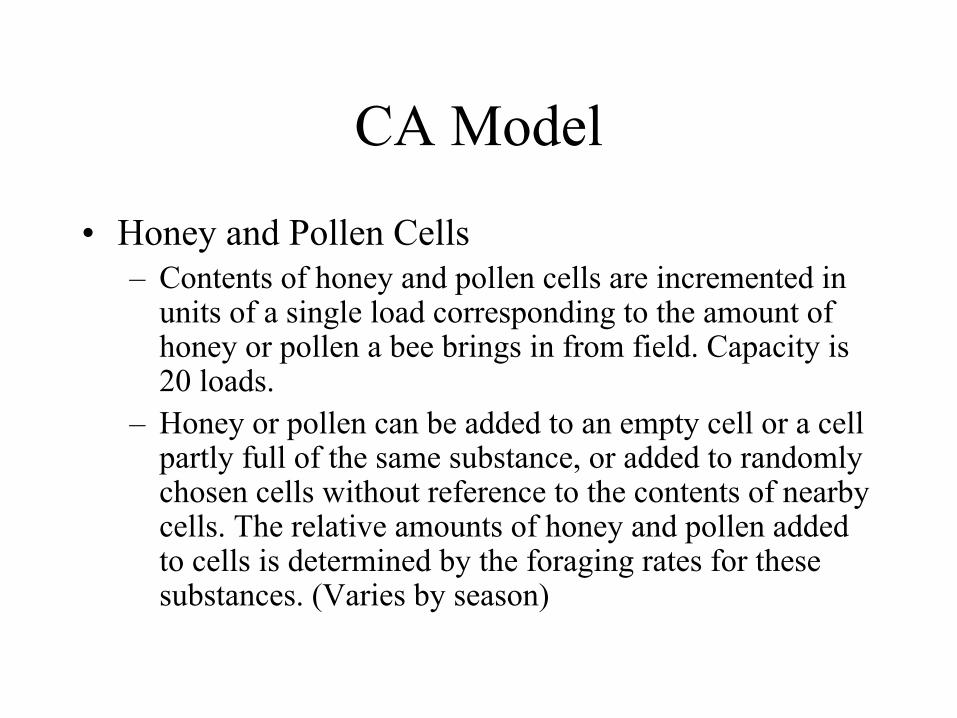
• Honey and Pollen Cells– Contents of honey and pollen cells are incremented in
units of a single load corresponding to the amount of honey or pollen a bee brings in from field. Capacity is 20 loads.
– Honey or pollen can be added to an empty cell or a cell partly full of the same substance, or added to randomly chosen cells without reference to the contents of nearby cells. The relative amounts of honey and pollen added to cells is determined by the foraging rates for these substances. (Varies by season)
CA Model
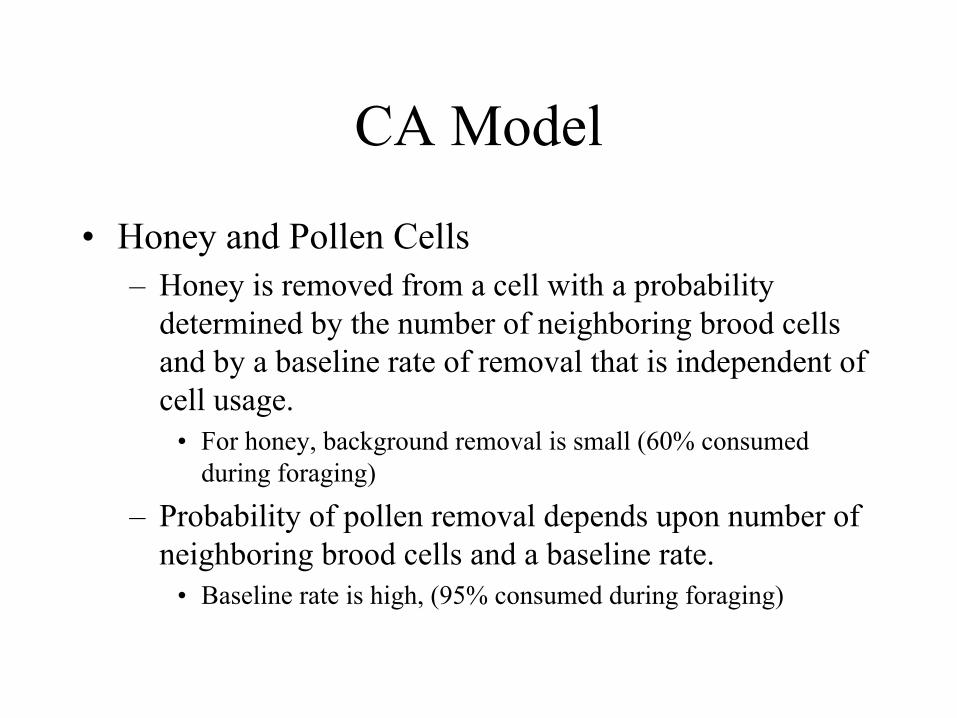
• Honey and Pollen Cells– Honey is removed from a cell with a probability
determined by the number of neighboring brood cells and by a baseline rate of removal that is independent of cell usage.
• For honey, background removal is small (60% consumed during foraging)
– Probability of pollen removal depends upon number of neighboring brood cells and a baseline rate.
• Baseline rate is high, (95% consumed during foraging)
CA Model
• Brood Cells– With each time increment the age of a brood
cell is increased by one day. When the age of the cell is 21, the cell is emptied.
• Simulation at: http://beelab.case.psu.edu• Starlogo simulation also.
Run demo

Other models are possible …
Get ready for some mathematics …
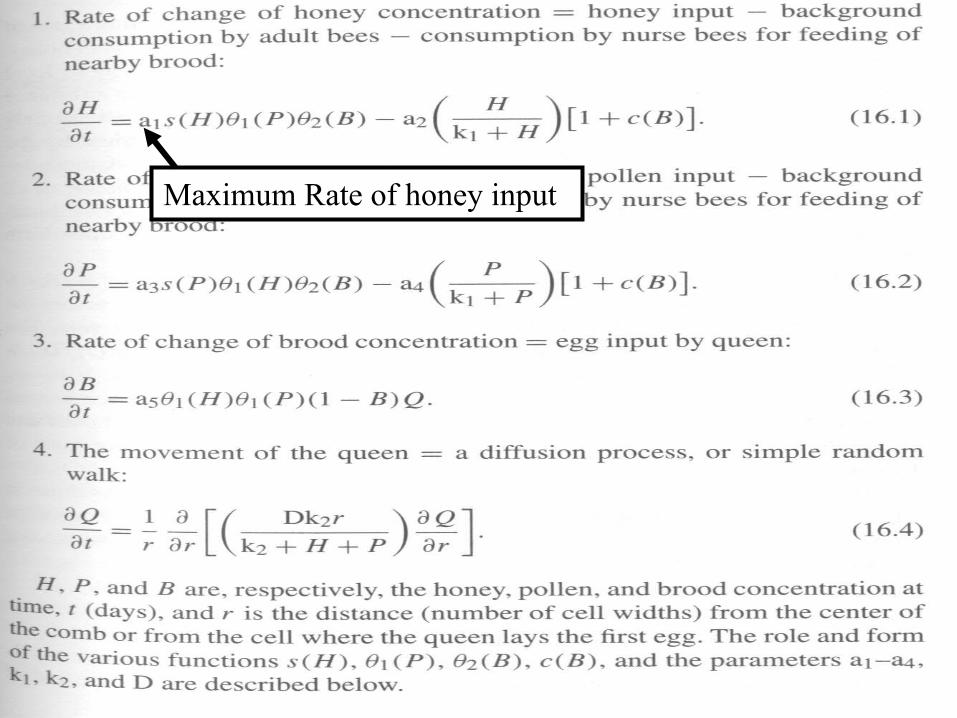
Camazine’s ModelMaximum Rate of honey input
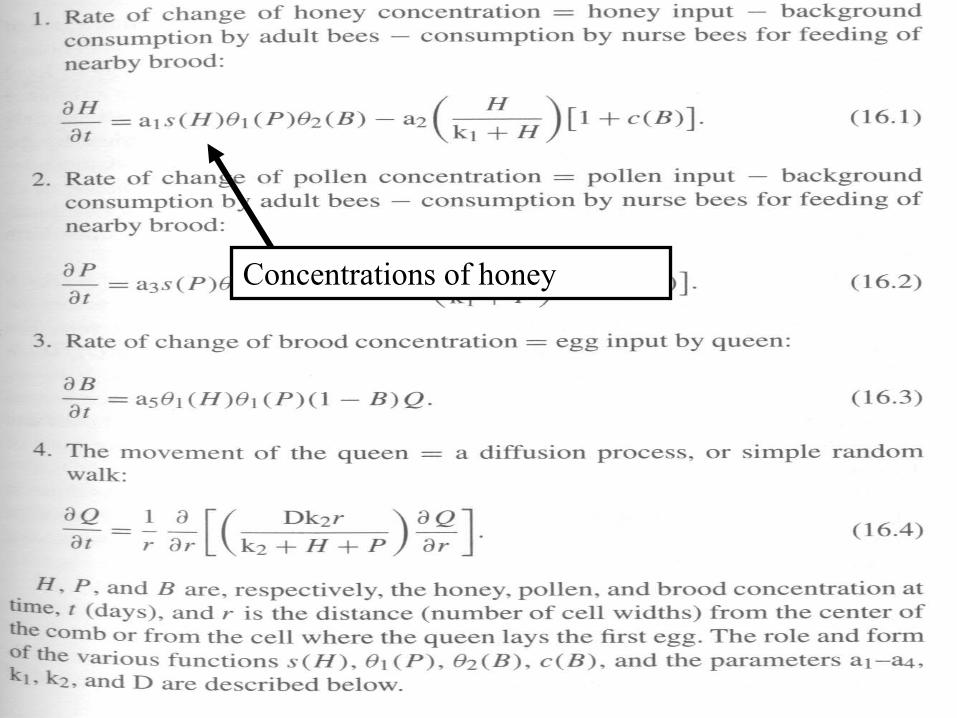
Camazine’s Model
Concentrations of honey

Camazine’s Model
Concentrations of pollen

Camazine’s Model
Concentrations of brood
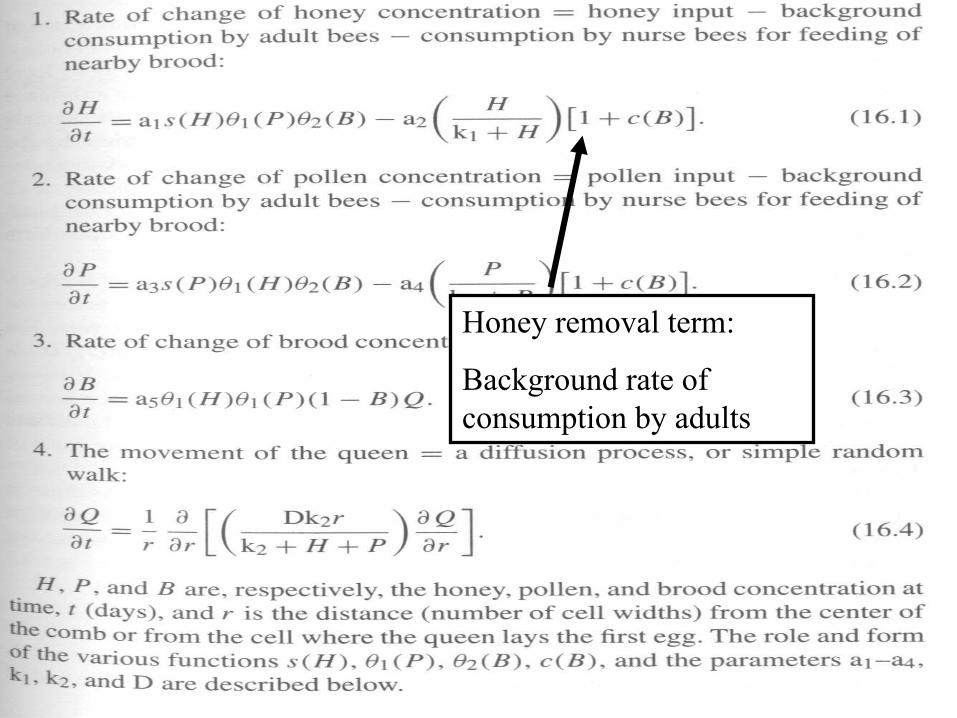
Camazine’s Model
Honey removal term:
Background rate of consumption by adults
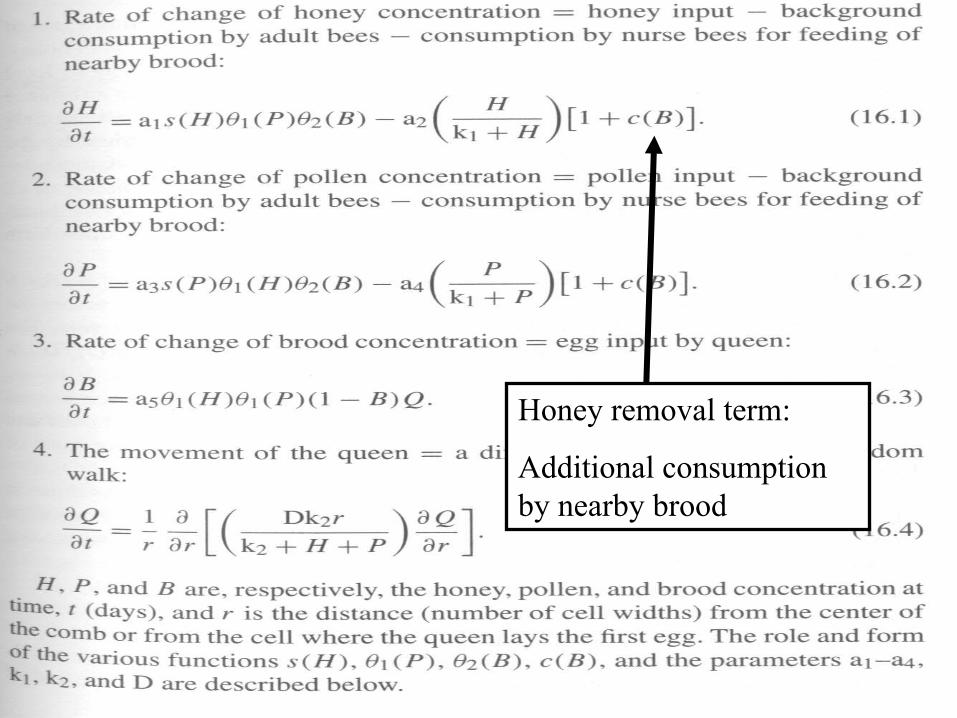
Camazine’s Model
Honey removal term:
Additional consumption by nearby brood

Camazine’s Model
Functions H, P and B are decreasing functions, which exhibit threshold-like behavior
k1 << 1
H/(k1 + H) ensures that if honey in cell bees remove it at a uniform rate

Camazine’s Model
Maximum Rate of pollen input

Camazine’s Model
Concentrations of pollen

Camazine’s Model
Concentrations of honey
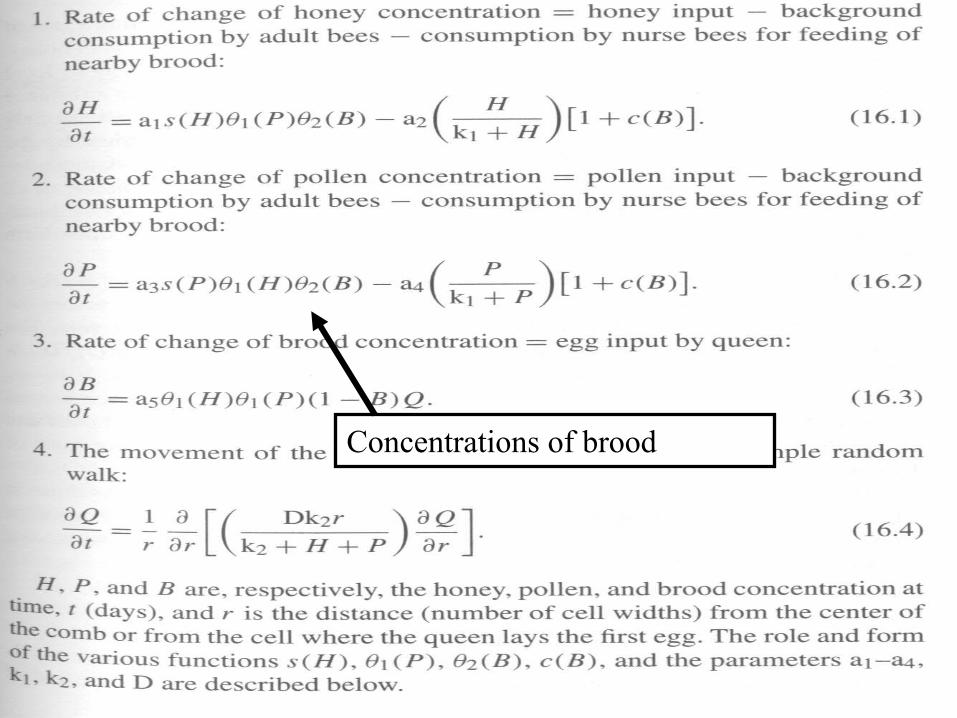
Camazine’s Model
Concentrations of brood
Camazine’s Model
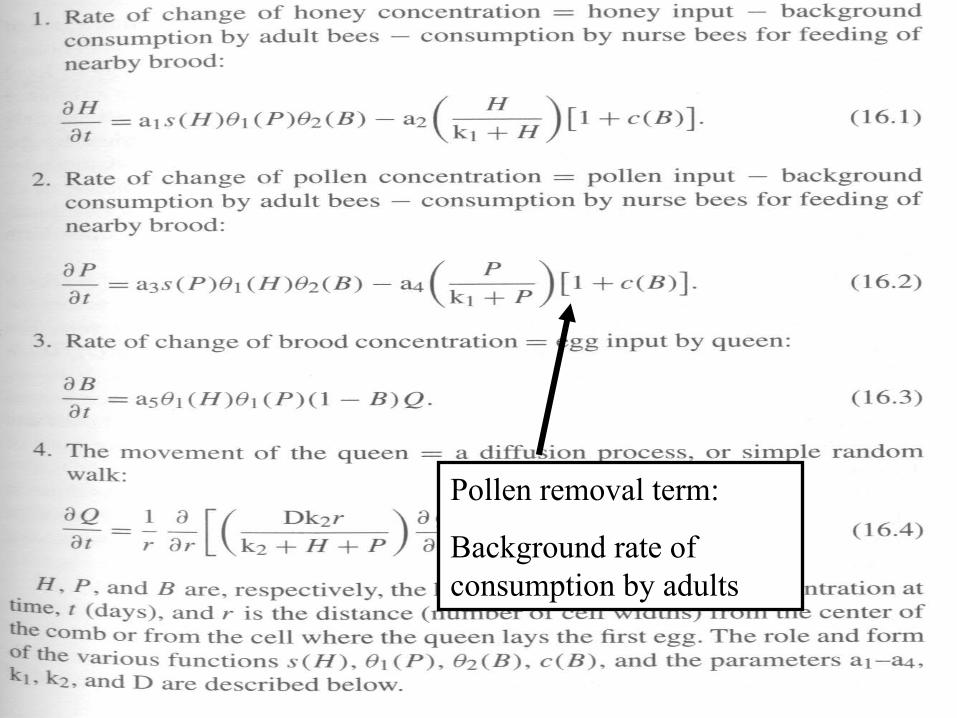
Pollen removal term:
Background rate of consumption by adults
Camazine’s Model
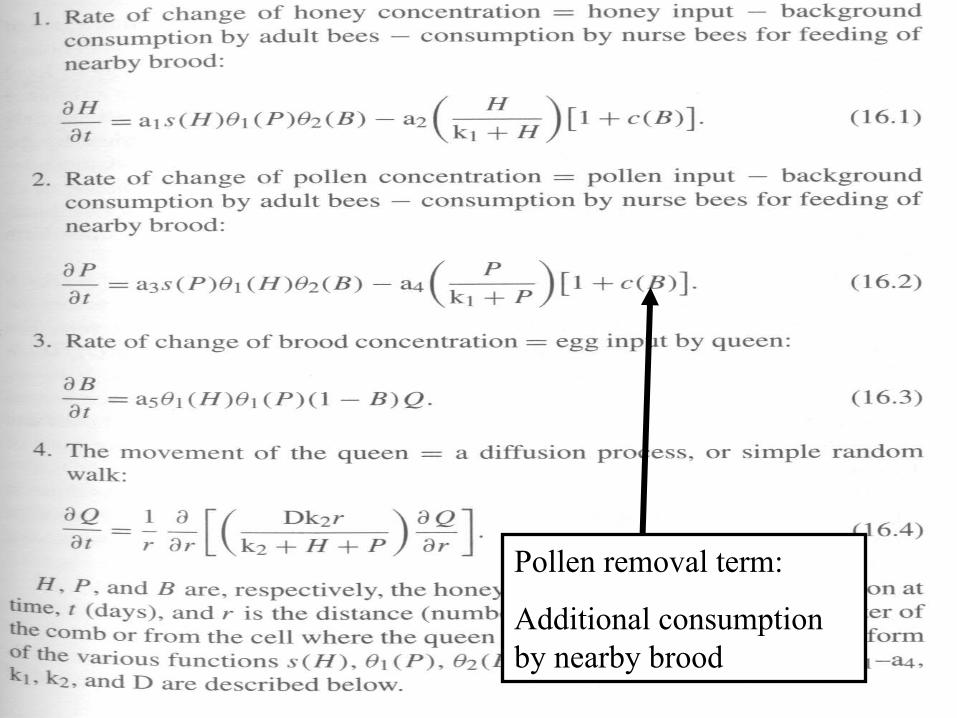
Pollen removal term:
Additional consumption by nearby brood
Camazine’s Model
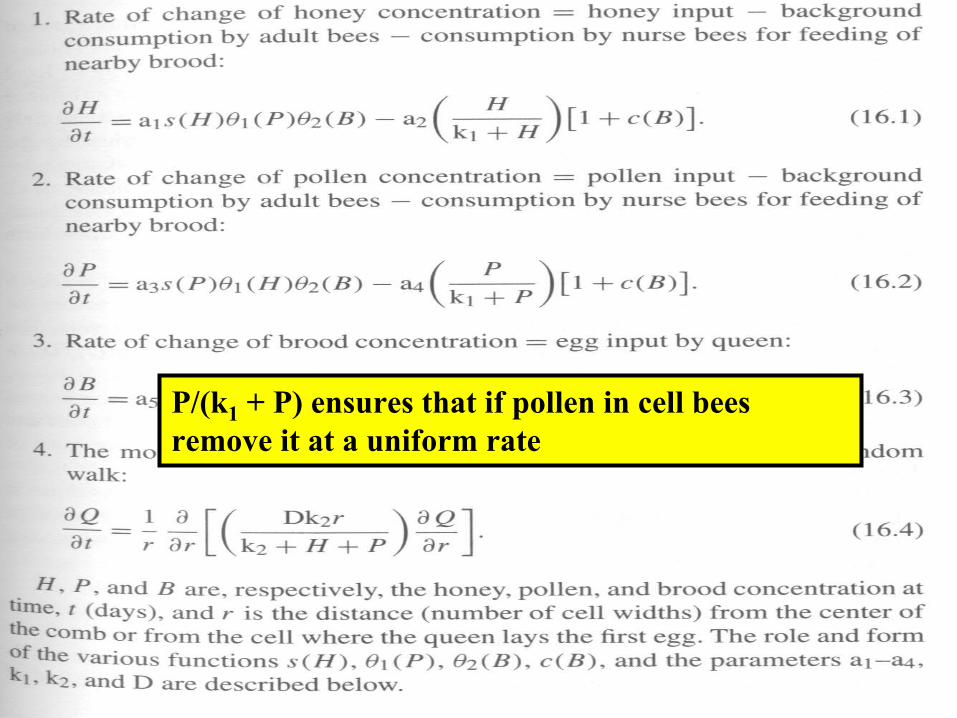
P/(k1 + P) ensures that if pollen in cell bees remove it at a uniform rate
Camazine’s Model
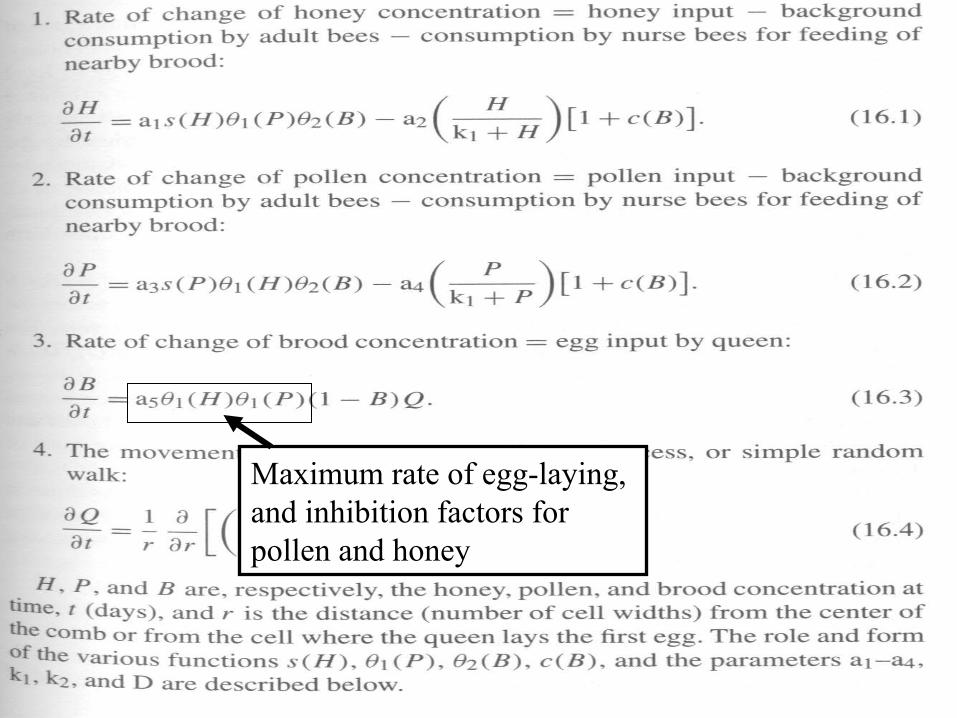
Maximum rate of egg-laying, and inhibition factors for pollen and honey
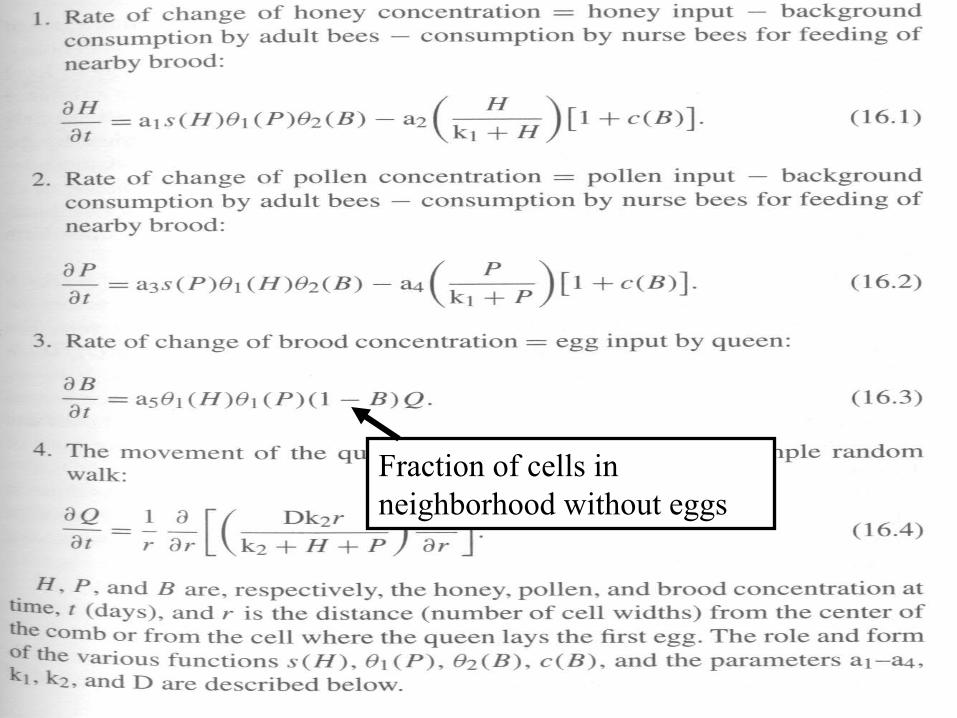
Camazine’s Model
Fraction of cells in neighborhood without eggs
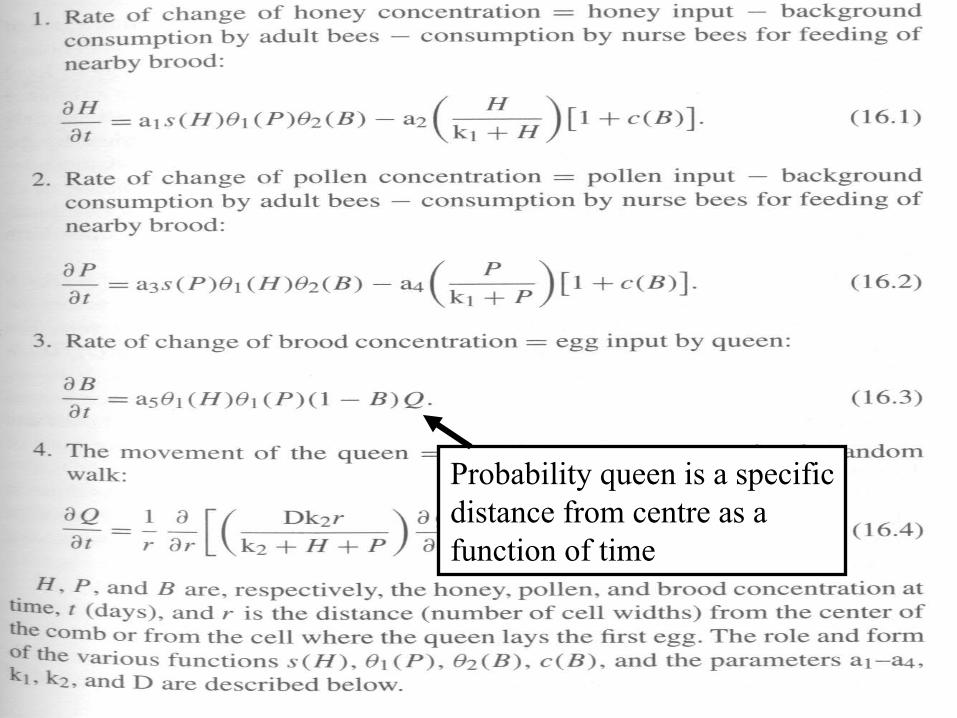
Camazine’s Model
Probability queen is a specific distance from centre as a function of time
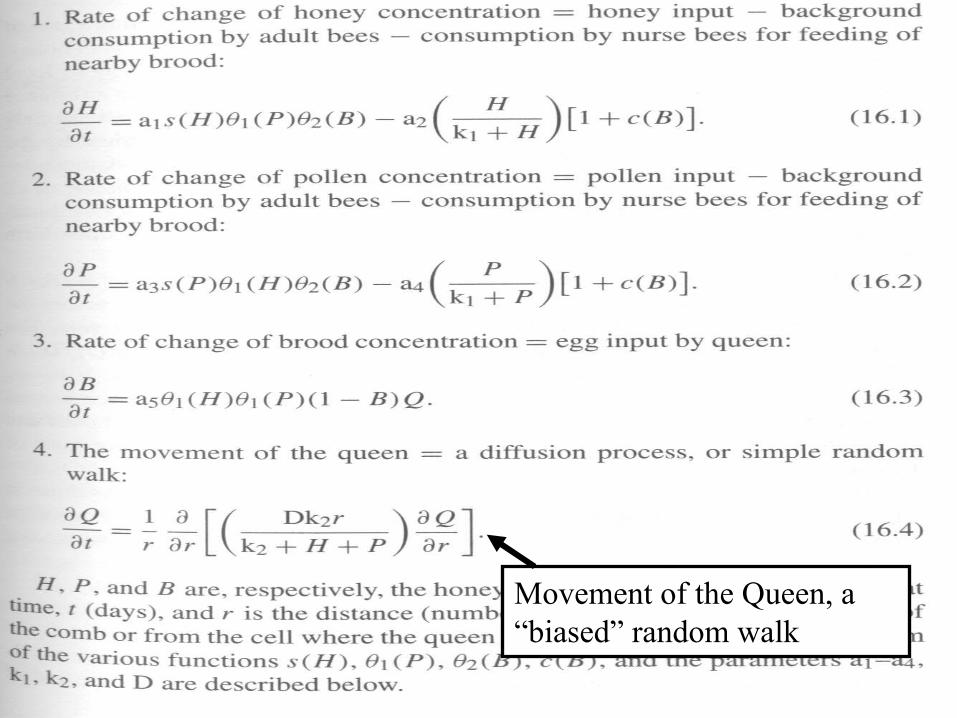
Camazine’s Model
Movement of the Queen, a “biased” random walk

Summary
• Concentric Patterns form when:– Eggs are deposited near previously laid eggs– Preferential removal factor > 0– Ratios of pollen and honey deposition to
consumption correspond to those found in nature
How did the system evolve
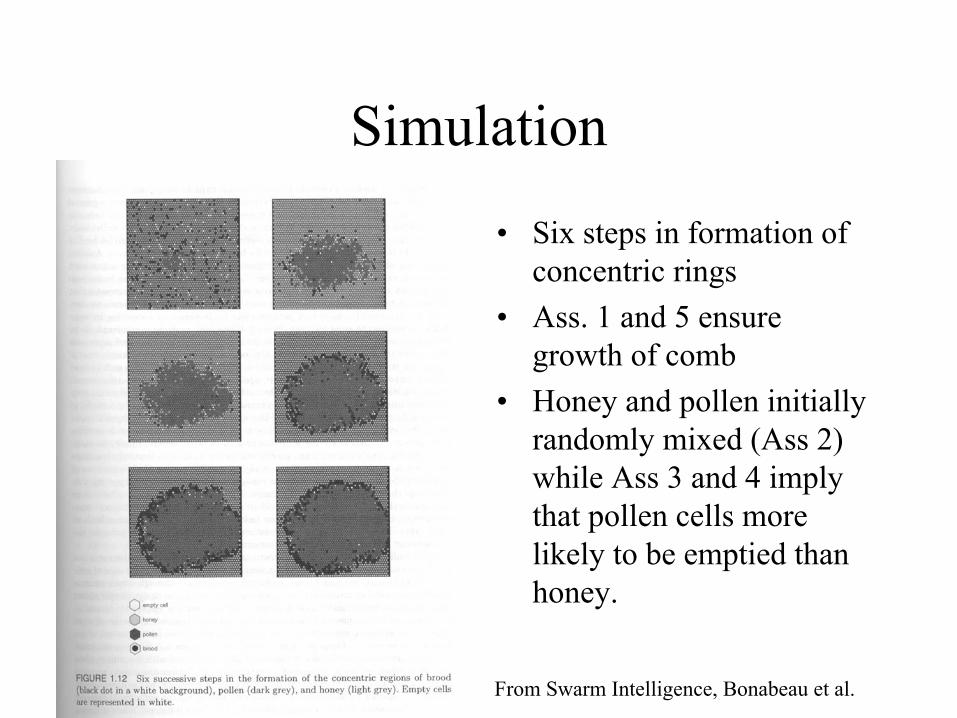
Simulation
• Figure 1.12 • Six steps in formation of concentric rings
• Ass. 1 and 5 ensure growth of comb
• Honey and pollen initially randomly mixed (Ass 2) while Ass 3 and 4 imply that pollen cells more likely to be emptied than honey.
From Swarm Intelligence, Bonabeau et al.

From Swarm Intelligence Bonabeau et al.

SO Properties continued
• Co-existence of several stable states (multistability)
• Fluctuations are amplified, implying many stable points in state space may be reached; e.g. example of identical food sources.– Mass recruitment in ants is based solely upon trail-
laying trail following
• Depends upon attractors in space and initial conditions.
SO Properties continued• Existence of bifurcations when parameters are
varied. Behavior changes dramatically at bifurcations.
• Macrotermes (termite) uses soil pellets impregnated with pheromone for pillar building.Two phases:– Non-coordinated when random deposits occur.– When critical size, coordination phase and pillars
emerge.– Existence of initial deposits stimulates (+ve feedback)
others to collect materials for pillar building.– Diffusion of pheromone is also key.
• Autocatalytic or “snow ball” effect.

Stigmergy
• Interactions between agents can be:– Direct– Indirect
• Direct: obvious, easily observable– Antennation (antenna touching)– Exchange of food, liquids– Mandibular contact
• Indirect: more subtle– Usually through environment, which is an active
component of system– Stigmergy (Grasse)
Stigmergy
• From Greek:– Stigma (sting)– Ergon (work)
• Explains Macrotermes observed nest building behaviour
• Coordination of activities is implicit, through the actual pillar structure
• Nest contruction occurs through:– Building strips and pillars with soil pellets and “mortar”– Arches are then created between pillars– Gaps are then filled to create walls

Nest Building (Figure 1.13)From Swarm IntelligenceBonabeau et al.
SematectonicCommunication
Stigmergy
• Individuals modify the environment in response to the local state (some aspect).
• Future behavior is then modified by that altered environmental state.
• Movement allows “interesting” patterns to develop.
• Achieves coordination of individual and collective behavior.
Other Examples of Stigmergy• Recruitment: ensure sufficient resources are allocated to a
task.• Trail laying: the stronger the trail, the more ants will tend
to follow it rather than deviate from it.• Nest cleaning: the more ants clean, the less ants need to
clean (NOT IN MY HOUSE!)• Pile formation: how ants create piles of dead ants, larvae,
or sand.• Wasp nest building: specific configurations of bricks
stimulate more bricks to be added to the structure.• Insect coordinate for carrying prey. When ants change
position they change forces on the prey, causing other ants to change their alignment. (NOT PHEROMONE HERE, THE ENVIRONMENT IS THE PREY).
Advantages of Stigmergy
• Direct communication is not required for coordination– Don’t need to know agent locations– Little, or no, global information is required
• No single agent is responsible for problem solving:– Individual agent loss is tolerated
• Environment is dynamic:– Stigmergy has built-in ability to deal with changing
environments– Very flexible, colony, not individuals respond to
environmental perturbations.

Areas of Application
• Software agents are interesting … but– Swarm-based robotics rapidly accelerating
• Also referred to as reactive collective robotics
– See: Journal of Autonomous Robots– Why?
• Colonies of robots make individuals simpler• Reduces communication complexity• Scales better• Decentralized• Cheaper
Nice talk orProject here
Swarm Robotic limitations
• Can end up with stagnation or deadlock– No referee to pull the protagonists apart!
• Solution, being emergent can be difficult to program– What are the individual rules of behavior?– Learn? GP, RL …
• Little or no theory to guide us – Heterogeneous agent systems are particularly difficult
to develop

So, why bother?
• Symbolic AI failures:– Brittle– Domain theory requirements– Frame problem– “Failure” of first order logics– Higher order logic theories being domain
specific with limited natural plausibility– Scalability
So, why bother?
• Rise of connectionism– Domain theory not symbolic, and can be
learned• Alife has emergence as guiding principle• Appreciation and understanding of
collective behaviour has increased– Learning from Nature
Where’s it going?
• Deveza: odor sensing for robot guidance– A literal implementation of pheromones
• Russell: heat trails– Electromagnetic pheromones
• Prescott and Ibbotson: paper trails– Robots dispense tissue
Potential Applications
• Satellite repair• NASA multi-robot system for investigating
the solar system … and beyond– Self-organize to optimize imaging performance
• Ship maintenance– Underwater robots clean ships collectively
• Kube: microsurgery