mmmmaaannnnuuuuaaallll dddeeee llllaaaa ... de asignatura/plan 2006/octavo... · identifique el...
TRANSCRIPT

MTMTMTMT----SUPSUPSUPSUP----XXXXXXXXXXXX REV00
MMMMMMMMAAAAAAAANNNNNNNNUUUUUUUUAAAAAAAALLLLLLLL DDDDDDDDEEEEEEEE LLLLLLLLAAAAAAAA AAAAAAAASSSSSSSSIIIIIIIIGGGGGGGGNNNNNNNNAAAAAAAATTTTTTTTUUUUUUUURRRRRRRRAAAAAAAA
ROBÓTICA I
INGENIERÍA MECATRÓNICA

1
FFFF----RPRPRPRP----CUPCUPCUPCUP----17/REV:0017/REV:0017/REV:0017/REV:00
DIRECTORIODIRECTORIODIRECTORIODIRECTORIO
Secretario de Educación PúblicaSecretario de Educación PúblicaSecretario de Educación PúblicaSecretario de Educación Pública
Dr. Reyes Taméz Guerra Subsecretario de Educación SuperiorSubsecretario de Educación SuperiorSubsecretario de Educación SuperiorSubsecretario de Educación Superior Dr. Julio Rubio Oca CoordinCoordinCoordinCoordinador de Universidades Politécnicasador de Universidades Politécnicasador de Universidades Politécnicasador de Universidades Politécnicas
Dr. Enrique Fernández Fassnacht

2
PAGINA LEGALPAGINA LEGALPAGINA LEGALPAGINA LEGAL
Ángel Díaz Pineda (UPVM) Primera Edición: 200_ DR 2005 Secretaría de Educación Pública México, D.F. ISBN-----------------

3
ÍNDICEÍNDICEÍNDICEÍNDICE
ÍNDICEÍNDICEÍNDICEÍNDICE................................................................................................................................................................................................................................................................................................................................................ 3333 INTRODUCCIÓNINTRODUCCIÓNINTRODUCCIÓNINTRODUCCIÓN .................................................................................................................................................................................................................................................................................... 4444 FICHA TÉCNICAFICHA TÉCNICAFICHA TÉCNICAFICHA TÉCNICA ........................................................................................................................................................................................................................................................................................ 5555 IDENTIFICACIÓN DE RESULTADOS DE APRENDIZAJEIDENTIFICACIÓN DE RESULTADOS DE APRENDIZAJEIDENTIFICACIÓN DE RESULTADOS DE APRENDIZAJEIDENTIFICACIÓN DE RESULTADOS DE APRENDIZAJE ................................ 7777 PLANEACIÓN DEL APRENDIZAJEPLANEACIÓN DEL APRENDIZAJEPLANEACIÓN DEL APRENDIZAJEPLANEACIÓN DEL APRENDIZAJE ............................................................................................................................................................ 11111111 DESARROLLO DE PRÁCTICADESARROLLO DE PRÁCTICADESARROLLO DE PRÁCTICADESARROLLO DE PRÁCTICA ........................................................................................................................................................................ 161616166666
INSTRUMENTOS DE EVALUACIÓNINSTRUMENTOS DE EVALUACIÓNINSTRUMENTOS DE EVALUACIÓNINSTRUMENTOS DE EVALUACIÓN .................................................................................................................................................... 21212121 GLOSARGLOSARGLOSARGLOSARIOIOIOIO ................................................................................................................................................................................................................................................................................................................ 48484848 BIBLIOGRAFÌABIBLIOGRAFÌABIBLIOGRAFÌABIBLIOGRAFÌA ........................................................................................................................................................................................................................................................................ 535353533333

4
INTRODUCCIÓNINTRODUCCIÓNINTRODUCCIÓNINTRODUCCIÓN
La robótica como hoy en día la conocemos, tiene sus orígenes hace miles de años. Aclarando que antiguamente los robots eran conocidos con el nombre de autómatas, y la robótica no era reconocida como ciencia, es mas, la palabra robot surgió después del origen de los autómatas.
En 1921, el checoslovaco Karel Capek, dio lugar al término robot. La palabra checa ‘Robota’ significa servidumbre o trabajador forzado, y cuando se tradujo al inglés se convirtió en el término robot.
La robótica es la ciencia que estudia los robots como sistemas que operan algún entorno real, estableciendo algún tipo de conexión inteligente entre percepción y acción. La diferencia fundamental de un robot y una máquina/herramienta autómata estriba en que esta última está especializada en su trabajo, mientras que el robot es más versátil y puede utilizarse como parte fundamental de una línea de producción flexible. En la actualidad el uso de los robots industriales está concentrado en operaciones muy simples, como tareas repetitivas que no requieren tanta precisión. Por lo anterior en esta asignatura se ofrece el origen y desarrollo de los robots industriales, definiciones y clasificación, descripción espacial, transformaciones homogéneas, cinemática directa y cinemática inversa de los robots, velocidades y fuerzas estáticas. El propósito del curso es que el alumno aplique los conocimientos y desarrolle las habilidades necesarias sobre el modelado de la cinemática directa e inversa de los robots. Para esto, se emplean una serie de estrategias de aprendizaje con las que se obtiene el conocimiento y se desarrollan las habilidades prácticas. Este curso aportara técnicas de utilidad para las materias tales como: robótica II.

5
FICHA TÉCNICAFICHA TÉCNICAFICHA TÉCNICAFICHA TÉCNICA
Nombre: Robótica I
Clave:
Justificación:
La robótica es una de las principales áreas de aplicación de la mecatrónica en la industria. En esta asignatura se realiza el análisis cinemático y control de robots manipuladores, obteniendo el modelo matemático del comportamiento de su geometría de movimiento sin considerar las fuerzas que lo generan. Dichos modelos se validan mediante simulaciones numéricas para realizar la implementación de un programa de control. Esta asignatura integra capacidades del área de electrónica, mecánica y de control.
Objetivo: Desarrollar la capacidad en el alumno para obtener, mediante diferentes métodos, el modelo cinemático de robots manipuladores en diferentes configuraciones de acuerdo a su estructura para simular, programar e implantar su control.
Pre - requisitos:
Algebra lineal. Análisis vectorial. Análisis de mecanismos. Análisis cinemático de partícula y cuerpo rígido. Modelado y simulación de procesos.
Capacidades y/o Habilidades Básicas
• Explicar los conceptos básicos de robótica • Configuraciones de robots. • Transformaciones homogéneas. • Descripción analítica del movimiento espacial del robot como una función del tiempo.
Estimación de tiempo (horas) necesario para transmitir el aprendizaje al alumno, por Unidad de Aprendizaje:
UNIDADES DE APRENDIZAJE
TEORÍA PRÁCTICA
presencial No
presencial
presencial No
presencial Introducción a la
Robótica Industrial 15 0 0 0
Descripción espacial y transformaciones
10 4 3 0
Modelo Cinemático Directo
21 0 3 0
Modelo Cinemático Inverso
17 0 0 0
Jacobiano: velocidades
y fuerzas estáticas 17 0 0 0
Total de horas por cuatrimestre: 90 Total de horas por semana: 6 Créditos: 6
FICHA TÉCNICAFICHA TÉCNICAFICHA TÉCNICAFICHA TÉCNICA
6
Bibliografía:
1. Introduction to robotics: Mechanics and control, J.J. Craig (1989 -2005), Prentice-Hall: Second and Third Edition.
2. Fundamentos de Robótica, A. Barrientos, L. F. Peñin, C. Balaguer, y R.
Aracil, (Primera edición en español), McGraw-Hill. 3. Robótica Industrial, M. P. Groover, M. Weiss, R. N. Nagel, N. G. Odrey
(1989), McGraw-Hill. 4. Robot Manipulator, R. P. Paul (1981), MIT Press 5. Robótica; Manipuladores y Robots Móviles, Aníbal Ollero Baturone
(2001), Marcombo. 6. Robotic engineering: And Integrated Approach, R. D. Klafter, T. A.
Chmielewski, M. Negin, Prentice-Hall. 7. Introdution to Robotics. Philip J. Mckerrow, Addison Wesley. 8. Robotics Toolbox for use with Matlab, Corke, P. (1996), Preston, Australia 9. Analytical Robotics and Mechatronics, Stadler, W. (1995), McGraw-Hill.

7
IDENTIFICACIÓN DE RESULTADOS DE APREIDENTIFICACIÓN DE RESULTADOS DE APREIDENTIFICACIÓN DE RESULTADOS DE APREIDENTIFICACIÓN DE RESULTADOS DE APRENDIZAJENDIZAJENDIZAJENDIZAJE
Unidades de Aprendizaje
Resultados de Aprendizaje
Criterios de Desempeño
El alumno será competente cuando:
Evidencias
(EP, ED, EC, EA)
Horas Totales
Introducción a la Robótica Industrial
El alumno identificara la historia y los conceptos básicos de la robótica.
Identifique la historia de la Robótica. EC: origen y desarrollo de la robótica, desarrollo industrial, robot, mercado y tendencias.
5 Identifique las características generales de un robot.
EC: grados de libertad, precisión repetitiva, capacidad de carga, región espacial de trabajo, área de trabajo lineal, velocidad, coordenadas de los movimientos, tipo de actuador, programabilidad, manipulación, locomoción.
El alumno interpretará la organización funcional del robot.
Identifique los elementos del Robot.
EC: Estructura mecánica, transmisiones, sistemas de accionamiento, sistemas sensoriales, sistemas de control, elementos terminales (efectores).
6 Identifique los tipos de articulaciones.
ED: Clasificación de las articulaciones (esférica o rotula, planar, tornillo, prismática, rotación, cilíndrica). Clasificación de las configuraciones (cartesiano, cilíndrico, esférico o polar, SCARA, angular o antropomórfico)
Identifique los tipos de configuraciones.
El alumno interpretará la clasificación de robots
Identifique la clasificación de robots por los institutos y asociaciones mundiales.
ED: Robot Institute of America (RIA), Japan Industrial Robot Association (JIRA), Association Francaise de Robotique Industrielle (AFRI).
4
Descripción espacial y transformaciones
El alumno interpretará los conceptos básicos de la geometría espacial.
Identifique la descripción de una posición, la descripción de una orientación, la descripción de un frame, la representación gráfica de frames.
EC: Describirá la posición de un punto en el espacio con un vector de posición, describirá con un conjunto de tres vectores una orientación, con un conjunto de cuatro vectores dará información de posición y orientación. EC: describirá un sistema coordenado relativo a otro.
IDENTIFICACION DE RESULTADOS DE APRENDIZAJEIDENTIFICACION DE RESULTADOS DE APRENDIZAJEIDENTIFICACION DE RESULTADOS DE APRENDIZAJEIDENTIFICACION DE RESULTADOS DE APRENDIZAJE

8
Unidades de Aprendizaje
Resultados de Aprendizaje
Criterios de Desempeño
El alumno será competente cuando:
Evidencias
(EP, ED, EC, EA)
Horas Totales
Identifique los Sistemas de coordenadas, traslaciones y rotaciones, descripción de la orientación (Euler - y/p/r).
EC: Sistemas ortonormales y dextrógiros. EC: traslación de un punto por un vector, rotación alrededor de un eje. EC: descripción de la orientación en términos de tres ángulos.
10
Identifique transformaciones homogéneas.
EC: Localización de objetos, posición relativa de un objeto respecto a otro. Representación de frames.
Modelo Cinemático Directo
El alumno interpretará la cinemática directa del manipulador.
Identifique el problema de la cinemática directa del manipulador. Identifique las juntas (consideraciones y definiciones).
ED: Numeración de eslabones y articulaciones.
5
Obtiene las matrices homogéneas compuestas y la inversión de estás.
EC: Construir matrices homogéneas para especificar rotación, traslación, perspectiva y escalados en un espacio tridimensional.
6
Identifique el Modelo de Denavit – Hartenberg.
ED: Encontrar los parámetros
de D-H ( ),,, iiii ad θα para
una articulación giratoria y para una articulación prismática.
6
Identifique el algoritmo de D-H para la obtención del Modelo Cinemático Directo.
EC: Diferencia el algoritmo de D-H estándar vs Modificado.
4
Modelo Cinemático Inverso
El alumno interpretará la cinemática inversa del manipulador.
Identifique el problema de la cinemática inversa del manipulador. Identifique la importancia del modelo Cinemático Inverso.
EC: Obtención del Modelo Cinemàtico Inverso.
5

9
Unidades de Aprendizaje
Resultados de Aprendizaje
Criterios de Desempeño
El alumno será competente cuando:
Evidencias
(EP, ED, EC, EA)
Horas Totales
Identifique la técnica de aproximación directa para resolver la cinemática inversa de los robots.
EC: Obtención del Modelo Cinemático Inverso por aproximación directa.
4
Identifique la técnica de aproximación geométrica para resolver la cinemática inversa de los robots.
EC: Obtención del Modelo Cinemático Inverso por aproximación geométrica.
4
Identifique la técnica del método de la transformada inversa.
EC: Obtención del Modelo Cinemático Inverso por el método de la transformada inversa.
4
Jacobiano: velocidades y fuerzas estáticas.
El alumno interpretará las nociones de velocidad angular y lineal de un cuerpo rígido y usa estos conceptos para analizar el movimiento de un manipulador.
Identifique la notación para la variación en tiempo de la posición y la orientación. Identifique la velocidad lineal y angular de cuerpos rígidos.
EC: Descripción del movimiento de un cuerpo rígido. EC: La velocidad de un punto debido a una velocidad angular. EC: La velocidad de un punto debido a la rotación de un frame de referencia.
5
Identifique el jacobiano en el dominio de la fuerza. Identifique singularidades.
EC: Uso de jacobianos para relacionar velocidades de las uniones a velocidades cartesianas dependiendo del tipo de brazo. EC: Singularidades en el espacio de trabajo.
6

10
Unidades de Aprendizaje
Resultados de Aprendizaje
Criterios de Desempeño
El alumno será competente cuando:
Evidencias
(EP, ED, EC, EA)
Horas Totales
Identifique fuerzas estáticas en manipuladores.
EC: Fuerza estática o torque estático (o ambos) actuando sobre el último enlace.
6
11
PLANEACIÓN DEL APRENDIZAJEPLANEACIÓN DEL APRENDIZAJEPLANEACIÓN DEL APRENDIZAJEPLANEACIÓN DEL APRENDIZAJE
Resultados de Aprendizaje
Criterios de Desempeño (El alumno es
competente cuando…)
Evidencias
(EP, ED, EC, EA)
Instrument o de
evaluación
Técnicas de aprendizaje
Espacio educativo Total de horas Teoría Práctica
Aula Lab. otro HP HNP HP HNP
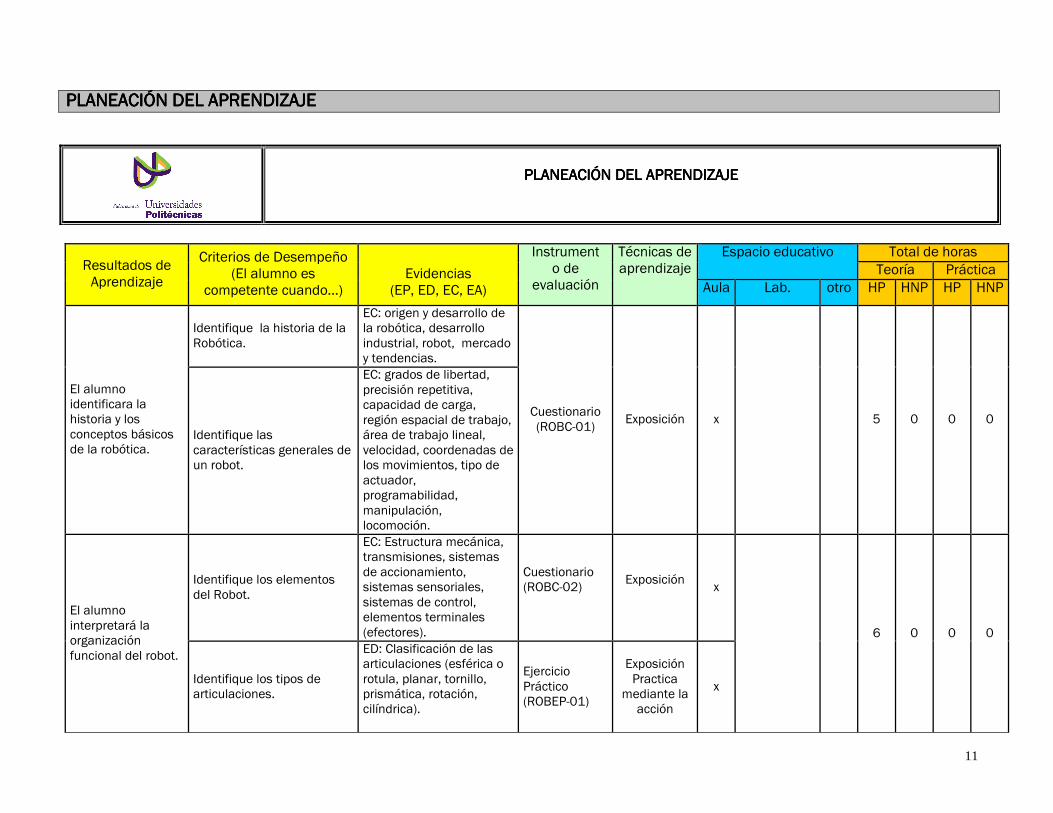
El alumno identificara la historia y los conceptos básicos de la robótica.
Identifique la historia de la Robótica.
EC: origen y desarrollo de la robótica, desarrollo industrial, robot, mercado y tendencias.
Cuestionario (ROBC-01)
Exposición x 5 0 0 0 Identifique las características generales de un robot.
EC: grados de libertad, precisión repetitiva, capacidad de carga, región espacial de trabajo, área de trabajo lineal, velocidad, coordenadas de los movimientos, tipo de actuador, programabilidad, manipulación, locomoción.
El alumno interpretará la organización funcional del robot.
Identifique los elementos del Robot.
EC: Estructura mecánica, transmisiones, sistemas de accionamiento, sistemas sensoriales, sistemas de control, elementos terminales (efectores).
Cuestionario (ROBC-02)
Exposición
x
6 0 0 0
Identifique los tipos de articulaciones.
ED: Clasificación de las articulaciones (esférica o rotula, planar, tornillo, prismática, rotación, cilíndrica).
Ejercicio Práctico (ROBEP-01)
Exposición Practica
mediante la acción
x
PLANEAPLANEAPLANEAPLANEACIÓN DEL APRENDIZAJE CIÓN DEL APRENDIZAJE CIÓN DEL APRENDIZAJE CIÓN DEL APRENDIZAJE

12
Resultados de Aprendizaje
Criterios de Desempeño (El alumno es
competente cuando…)
Evidencias
(EP, ED, EC, EA)
Instrument o de
evaluación
Técnicas de aprendizaje
Espacio educativo Total de horas Teoría Práctica
Aula Lab. otro HP HNP HP HNP
Identifique los tipos de configuraciones.
ED: Clasificación de las configuraciones (cartesiano, cilíndrico, esférico o polar, SCARA, angular o antropomórfico)
Ejercicio Práctico (ROBEP-01)
Exposición Practica
mediante la acción
x
El alumno interpretará la clasificación de robots.
Identifique la clasificación de robots por los institutos y asociaciones mundiales.
ED: Robot Institute of America (RIA), Japan Industrial Robot Association (JIRA), Association Francaise de Robotique Industrielle (AFRI).
Ejercicio Práctico (ROBEP-02)
Exposición Practica
mediante la acción
x 4 0 0 0
El alumno interpretará los conceptos básicos de la geometría espacial.
Identifique la descripción de una posición, la descripción de una orientación, la descripción de un frame, la representación gráfica de frames.
EC: Describirá la posición de un punto en el espacio con un vector de posición, describirá con un conjunto de tres vectores una orientación, con un conjunto de cuatro vectores dará información de posición y orientación. EC: Describirá un sistema coordenado relativo a otro.
Cuestionario (ROBC-03)
Exposición X
X Práctica No.1
10 4 3 0 Identifique los Sistemas de coordenadas, traslaciones y rotaciones, descripción de la orientación (Euler - y/p/r).
EC: Sistemas ortonormales y dextrógiros. EC: traslación de un punto por un vector, rotación alrededor de un eje. EC: descripción de la orientación en términos de tres ángulos.
Identifique transformaciones homogéneas.
EC: Localización de objetos, posición relativa de un objeto respecto a otro. Representación de frames.

13
Resultados de Aprendizaje
Criterios de Desempeño (El alumno es
competente cuando…)
Evidencias
(EP, ED, EC, EA)
Instrument o de
evaluación
Técnicas de aprendizaje
Espacio educativo Total de horas Teoría Práctica
Aula Lab. otro HP HNP HP HNP
El alumno interpretará la cinemática directa del manipulador.
Identifique el problema de la cinemática directa del manipulador. Identifique las juntas (consideraciones y definiciones).
ED: Numeración de eslabones y articulaciones.
Cuestionario (ROBEP-03)
Exposición Práctica
mediante la acción
X X
Práctica No. 2
5 0 3 0
Obtiene las matrices homogéneas compuestas y la inversión de estás.
EC: Construir matrices homogéneas para especificar rotación, traslación, perspectiva y escalados en un espacio tridimensional.
Cuestionario (ROBC-04)
Exposición
X
6 0 0 0
Identifique el Modelo de Denavit – Hartenberg.
EC: Encontrar los parámetros de D-H
( ),,, iiii ad θα para una
articulación giratoria y para una articulación prismática.
Cuestionario (ROBEP-04)
Exposición Práctica
mediante la acción
X
6 0 0 0
Identifique el algoritmo de D-H para la obtención del Modelo Cinemático Directo.
EC: Diferencia el algoritmo de D-H estándar vs Modificado.
Cuestionario (ROBC-05)
4 0 0 0
El alumno interpretará la cinemática inversa del manipulador.
Identifique el problema de la cinemática inversa del manipulador. Identifique la importancia del modelo Cinemático Inverso.
ED: Obtención del Modelo Cinemàtico Inverso.
Cuestionario (ROBEP-05)
Exposición Práctica
mediante la acción
X 5 0 0 0
Identifique la técnica de
EC: Obtención del Modelo Cinemático Inverso por
Cuestionario (ROBC-06)
Exposición
X
4 0 0 0

14
Resultados de Aprendizaje
Criterios de Desempeño (El alumno es
competente cuando…)
Evidencias
(EP, ED, EC, EA)
Instrument o de
evaluación
Técnicas de aprendizaje
Espacio educativo Total de horas Teoría Práctica
Aula Lab. otro HP HNP HP HNP
aproximación directa para resolver la cinemática inversa de los robots.
aproximación directa.
Identifique la técnica de aproximación geométrica para resolver la cinemática inversa de los robots.
EC: Obtención del Modelo Cinemático Inverso por aproximación geométrica.
Cuestionario (ROBC-07)
Exposición
X
4 0 0 0
Identifique la técnica del método de la transformada inversa.
EC: Obtención del Modelo Cinemático Inverso por el método de la transformada inversa.
Cuestionario (ROBC-08)
Exposición
X
4 0 0 0
El alumno interpretará las nociones de velocidad angular y lineal de un cuerpo rígido y usa estos conceptos para analizar el movimiento de un manipulador.
Identifique la notación para la variación en tiempo de la posición y la orientación Identifique la velocidad lineal y angular de cuerpos rígidos.
EC: Descripción del movimiento de un cuerpo rígido. EC: La velocidad de un punto debido a una velocidad angular. EC: La velocidad de un punto debido a la rotación de un frame de referencia.
Cuestionario (ROBC-9)
Exposición
X
5 0 0 0
Identifique el jacobiano en el dominio de la fuerza. Identifique singularidades.
EC: Uso de jacobianos para relacionar velocidades de las uniones a velocidades cartesianas dependiendo del tipo de brazo. EC: Singularidades en el espacio de trabajo.
Cuestionario (ROBC-10)
Exposición
X
6 0 0 0
Identifique fuerzas estáticas en manipuladores.
EC: Fuerza estática o torque estático (o ambos) actuando sobre el último enlace.
Cuestionario (ROBC-11)
Exposición
X
6 0 0 0


16
DESARROLLO DE PRÁCTICADESARROLLO DE PRÁCTICADESARROLLO DE PRÁCTICADESARROLLO DE PRÁCTICA
Fecha:
Nombre de la asignatura:
Robótica I
Nombre:
Número :
1
Duración (horas) :
3
Resultado de aprendizaje:
El alumno Interpretará las trayectorias descritas por el efector del manipulador RR.
Actividades a desarrollar: • Familiarizarse con Matlab como herramienta adecuada para cálculo matricial y, en concreto,
para simulación de robots. • Representar la localización de objetos en el espacio. • Dar al alumno la cantidad de puntos que recorre el efector de un manipulador RR, la
longitud de los enlaces y la variación de las variables rotacionales. Evidencia a generar en el desarrollo de la práctica: Instrumento de
evaluación
ED: Utiliza Matlab para obtener el análisis de la trayectorias del efector del manipulador RR.
ROBLC-01
EP: tres simulaciones, variando los parámetros para el efector del manipulador RR.
ROBLC-01
EP: Reporte de practica de simulación. ROBLC-02
DESARROLLO DE PRACTICADESARROLLO DE PRACTICADESARROLLO DE PRACTICADESARROLLO DE PRACTICA

18
Fecha:
Nombre de la asignatura:
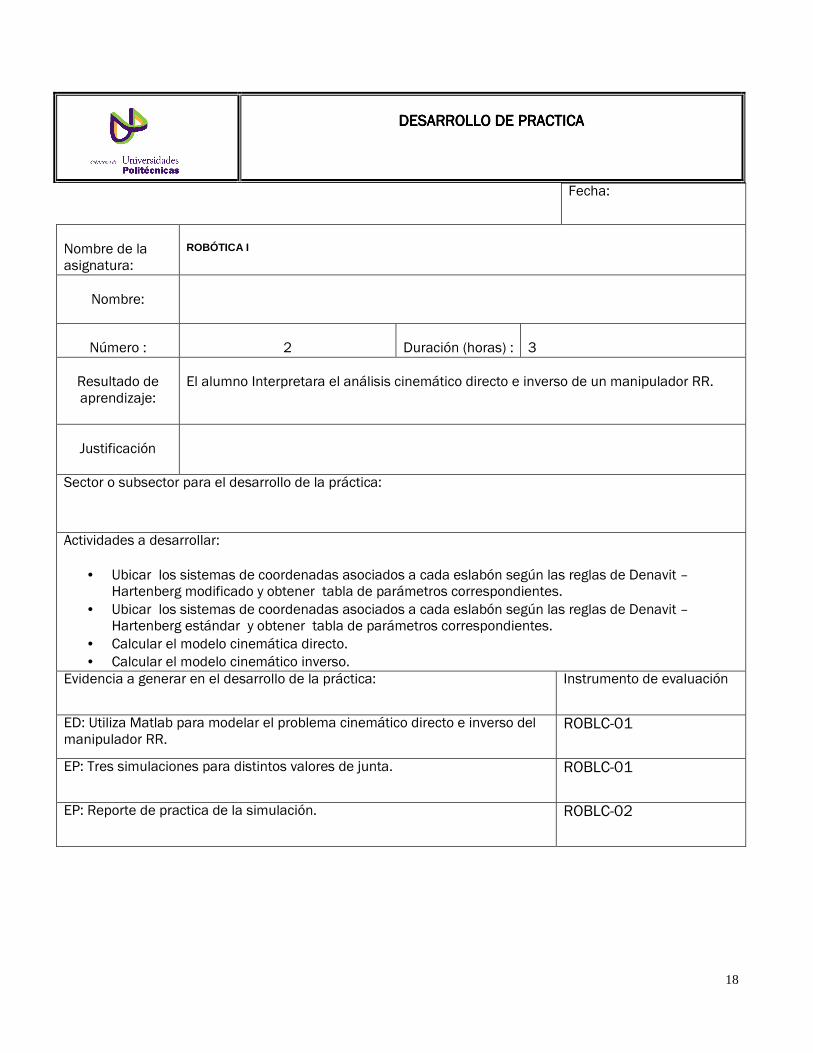
ROBÓTICA I
Nombre:
Número :
2
Duración (horas) :
3
Resultado de aprendizaje:
El alumno Interpretara el análisis cinemático directo e inverso de un manipulador RR.
Justificación
Sector o subsector para el desarrollo de la práctica:
Actividades a desarrollar:
• Ubicar los sistemas de coordenadas asociados a cada eslabón según las reglas de Denavit – Hartenberg modificado y obtener tabla de parámetros correspondientes.
• Ubicar los sistemas de coordenadas asociados a cada eslabón según las reglas de Denavit – Hartenberg estándar y obtener tabla de parámetros correspondientes.
• Calcular el modelo cinemática directo. • Calcular el modelo cinemático inverso.
Evidencia a generar en el desarrollo de la práctica: Instrumento de evaluación
ED: Utiliza Matlab para modelar el problema cinemático directo e inverso del manipulador RR.
ROBLC-01
EP: Tres simulaciones para distintos valores de junta. ROBLC-01
EP: Reporte de practica de la simulación. ROBLC-02
DESARROLLO DE PRACTICADESARROLLO DE PRACTICADESARROLLO DE PRACTICADESARROLLO DE PRACTICA

19
DATOS GENERALES DEL PROCESO DE EVALUACIÓN
NOMBRE DE LA ASIGNATURA,: ROBÓTICA I CODIGO:
NOMBRE DEL ALUMNO: FIRMA DEL ALUMNO:
MATRICULA:: CARRERA:: GRUPO: FECHA:
NOMBRE DEL EVALUADOR: FIRMA DEL EVALUADOR:
INSTRUCCIONES
Revise los documentos o actividades que se solicita n; y marque “SI” cuando la evidencia a evaluar se cumple; y NO en caso contrario. En La columna de “OBSERVACIONES ” registre los datos relevantes asociados a la evaluación
ACTIVIDAD 1 Dar al alumno los parámetros necesarios para simul ar la localización espacial y el problema cinemático directo e inverso del manipulador RR.
CÓDIGO ITEM SI NO OBSERVACIONES
ROBLC01 - R01 Los valores encontrados en la simulación son correctos.
ROBLC01 - R02 La simulación se realiza con orden, claridad y limpieza
ROBLC01 - R03 Se alcanza el resultado esperado con la simulación.
LISTA DE COTEJOLISTA DE COTEJOLISTA DE COTEJOLISTA DE COTEJO
ROBLCROBLCROBLCROBLC----00001111

20
DATOS GENERALES DEL PROCESO DE EVALUACIÓN
NOMBRE DE LA ASIGNATURA,: ROBÓTICA I CODIGO:
NOMBRE DEL ALUMNO: FIRMA DEL ALUMNO:
MATRICULA:: CARRERA:: GRUPO: FECHA:
NOMBRE DEL EVALUADOR: FIRMA DEL EVALUADOR:
INSTRUCCIONES
Revise los documentos o actividades que se solicita n; y marque “SI” cuando la evidencia a evaluar se cumple; y NO en caso contrario. En La columna de “OBSERVACIONES ” registre los datos relevantes asociados a la evaluación
CÓDIGO ITEM SI NO OBSERVACIONES
ROBLC02- R01
El reporte contiene los elementos requeridos conforme a su formato (Numero mínimo de cuartillas., antecedentes, justificación, Introducción, desarrollo, indicadores de resultados, conclusiones, fuentes bibliografiítas, etc.), de acuerdo a la practica desarrollada.
ROBLC02- R02 Se indican los materiales y herramienta utilizados durante la práctica.
ROBLC02- R03 Las actividades realizadas, sus procedimientos y resultados obtenidos son reportados de forma ordenada y sistemática.
ROBLC02- R04 La práctica fue realizada de manera correcta.
ROBLC02- R05 El contenido del reporte es claro y congruente con las actividades realizadas.
ROBLC02- R06 Las conclusiones son congruentes con la información obtenida y aportan una interpretación de los resultados.
ROBLC02 -R07
El reporte de actividades cumple con los Requisitos de:
Buena presentación. No tiene faltas de ortografía. Maneja del lenguaje técnico apropiado.
ROBLC02- R08 Entrego el reporte en la fecha y hora señalada.
LISTA DE COTEJOLISTA DE COTEJOLISTA DE COTEJOLISTA DE COTEJO
ROROROROBBBBLCLCLCLC----00002222

21
INSTRUMEINSTRUMEINSTRUMEINSTRUMENTOS DE EVALUACIÓNNTOS DE EVALUACIÓNNTOS DE EVALUACIÓNNTOS DE EVALUACIÓN
DATOS GENERALES DEL PROCESO DE EVALUACIÓN
NOMBRE DE LA ASIGNATURA,: ROBÓTICA I CODIGO:
NOMBRE DEL ALUMNO: FIRMA DEL ALUMNO:
MATRICULA:: CARRERA:: GRUPO: FECHA:
NOMBRE DEL EVALUADOR: FIRMA DEL EVALUADOR:
INSTRUCCIONES
Estimado usuario: • Usted tiene en las manos un instrumento de evaluación que permitirá fundamentar las actividades que ha demostrado a
través de su desempeño o en la entrega de sus productos. • Conteste los siguientes planteamientos de manera clara.
• Le recordamos tomar el tiempo necesario para contestar y desarrollar su contenido. CÓDIGO ASPECTO
ROBC01 – R01
1. El origen de la robótica empieza con…
A) El león mecánico construido por Leonardo Da Vinci
B) El hombre de palo, por Juanelo Turriano.
C) Muñecos animados, por Jacques Vaucanson.
D) El gallo de Estrasburgo.
CUMPLE : SI NO
ROBC01 – R02
2. Califica como verdadera o falsa la siguiente afirmación.
La robótica intenta establecer una conexión entre las ideas que tenemos sobre el mundo físico y el flujo de información sobre él, las cuáles plasmamos mediante programas y el mundo físico mismo.
A) Cierto
B) Falso
CUMPLE : SI NO
ROBC01 – R03
3. Identifica que el robot como “máquina” lleva un desarrollo independiente del término robot.
CUMPLE : SI NO
CUESTIONARIOCUESTIONARIOCUESTIONARIOCUESTIONARIO
ROBROBROBROBCCCC----01010101

22
((ROBC-01) CONTINUACIÓN…
ROBC01 – R04
4. Identificar con claridad los elementos del concepto de robot:
A) Funciones ordinariamente asignadas a los seres humanos.
B) Ejecuta automáticamente operaciones o movimientos muy variados.
C) Esta fijo en un sitio o puede moverse.
D) Diseñado para mover materiales, piezas herramientas, o dispositivos especiales.
CUMPLE : SI NO
ROBC01 – R05 5. ¿Cuál es el mercado y la tendencia actual de la robótica?.
CUMPLE : SI NO
ROBC01 – R06
6. Relacione ambas columnas, indicando la letra del elemento, en el paréntesis de la definición que le corresponda :
a) Grados de libertad. ( )
Es la capacidad de volver a situarse la mano en un punto determinado un número indefinido de veces.
b) Precisión repetitiva. ( ) Es el peso máximo que el robot puede manipular.
c) Capacidad de carga. ( )
Es el volumen en el cuál el robot puede manipular objetos. Se define según las coordenadas de programación
d) Región espacial de trabajo. ( )
Es el tipo de sistema de posicionamiento y orientación del elemento Terminal del robot
e) Área de trabajo lineal. ( ) Es la facultad de un robot para desplazarse de un lugar a otro.
f) Velocidad. ( ) Es la manera como se programa el robot para sus tareas.
g) Coordenadas de los movimientos. ( )
Es la superficie plana sobre la que el robot puede manipular objetos
h) Tipo de actuador. ( ) Capacidad de actuar sobre los objetos, trasladándolos o modificándolos.
i) Programabilidad. ( )
Es el número de movimientos básicos e independientes que posicionan a los elementos de un robot.
j) Manipulación. ( ) Es el tipo del elemento motriz que genera los movimientos de las las articulaciones del robot.
k) Locomoción. ( )
Es la rapidez con que trabaja el robot, una medida de su rendimiento.
CUMPLE : SI NO
TOTAL % Aciertos

23
DATOS GENERALES DEL PROCESO DE EVALUACIÓN
NOMBRE DE LA ASIGNATURA,: ROBÓTICA I CODIGO:
NOMBRE DEL ALUMNO: FIRMA DEL ALUMNO:
MATRICULA:: CARRERA:: GRUPO: FECHA:
NOMBRE DEL EVALUADOR: FIRMA DEL EVALUADOR:
INSTRUCCIONES
Estimado usuario: • Usted tiene en las manos un instrumento de evaluación que permitirá fundamentar las actividades que ha demostrado a
través de su desempeño o en la entrega de sus productos. • Conteste los siguientes planteamientos de manera clara. • Le recordamos tomar el tiempo necesario para contestar y desarrollar su contenido.
CÓDIGO ASPECTO
ROBC02 – R01
1. Identifica con claridad los elementos del robot:
A) Estructura mecánica.
B) Transmisiones.
C) Sistemas de accionamiento.
D) Sistema sensorial.
E) Sistemas de control.
F) Elementos terminales.
CUMPLE : SI NO
ROBC02 – R02 2. Dibuje un esquema de la organización funcional de un robot.
CUMPLE : SI NO
CUESTIONARIOCUESTIONARIOCUESTIONARIOCUESTIONARIO
ROBCROBCROBCROBC----02020202

24
(ROBC-02) CONTINUACIÓN…
ROBC02 – R03
3. Relacione ambas columnas, indicando la letra del elemento, en el paréntesis de la definición que le corresponda :
a) Estructura Mecánica. ( )
Tienen por misión generar el movimiento de los elementos del robot según las órdenes dadas por la unidad de control.
b) Transmisiones. ( ) También llamados “efectores finales” (end effector) son los encargados de interactuar directamente con el entorno del robot.
c) Actuadores.
( )
Determinar las siguientes características del robot: Adaptabilidad. Polivalencia. Grado de Automatismo.
d) Sensores. ( )
Son los elementos encargados de transmitir el movimiento desde los actuadores hasta las articulaciones.
e) Sistemas de control. ( )
Permite al robot el conocimiento de su propio estado y el de su entorno.
f) Elementos terminales. ( )
Está formado por una serie de elementos o eslabones unidos mediante articulaciones que permiten un movimiento relativo entre cada dos eslabones consecutivos. Existen varios tipos de articulaciones.
CUMPLE : SI NO
TOTAL % Aciertos

25
DATOS GENERALES DEL PROCESO DE EVALUACIÓN
NOMBRE DE LA ASIGNATURA,: ROBÓTICA I CODIGO:
NOMBRE DEL ALUMNO: FIRMA DEL ALUMNO:
MATRICULA:: CARRERA:: GRUPO: FECHA:
NOMBRE DEL EVALUADOR: FIRMA DEL EVALUADOR:
INSTRUCCIONES
Estimado usuario: • Usted tiene en las manos un instrumento de evaluación que permitirá fundamentar las actividades que ha demostrado a
través de su desempeño o en la entrega de sus productos. • Conteste los siguientes planteamientos de manera clara. • Le recordamos tomar el tiempo necesario para contestar y desarrollar su contenido.
CÓDIGO ASPECTO
ROBC03 – R01
1. Relacione ambas columnas, indicando la letra del elemento, en el paréntesis de la definición que le corresponda :
a) Posición. ( )
Se describe con un conjunto de tres vectores.
b) Orientación. ( ) El tercer eje es producto vectorial de los otros dos.
c) Frame. ( )
Se describe con un vector de posición.
d) Representación gráfica de frames. ( )
Se describe con cuatro vectores dando información de orientación y posición.
e) Dextrógiros ( )
Describe la posición de un sistema coordenado con respecto a otro.
f) Ortonormales ( )
Sus tres ejes son perpendiculares dos a dos y las longitudes de los vectores básicos de cada eje son iguales.
CUMPLE : SI NO
ROBC03 – R02
2. Identifica la orientación en función de las componentes de un vector unitario, es apropiado para muchos propósitos describirlas en términos de tres ángulos: hay dos representaciones usuales: los llamados ángulos de Euler, y el sistema y/p/r.
CUMPLE : SI NO
CUESTIONARIOCUESTIONARIOCUESTIONARIOCUESTIONARIO
ROBCROBCROBCROBC----00003333

26
(ROBC-03) CONTINUACIÓN…
ROBC03 – R03
3. Identifica los operadores de rotación y traslación.
CUMPLE : SI NO
ROBC03 – R04
4. Identifica la matriz de transformación homogénea como una matriz de 4 x 4 que transforma un vector de posición expresado en coordenadas homogéneas desde un sistema de coordenadas a otro.
CUMPLE : SI NO

27
(ROBC-03) CONTINUACIÓN…
ROBC03 – R05
5. Interpreta geométricamente las matrices de transformación homogénea.
CUMPLE : SI NO
TOTAL % Aciertos

28
DATOS GENERALES DEL PROCESO DE EVALUACIÓN
NOMBRE DE LA ASIGNATURA,: ROBÓTICA I CODIGO:
NOMBRE DEL ALUMNO: FIRMA DEL ALUMNO:
MATRICULA:: CARRERA:: GRUPO: FECHA:
NOMBRE DEL EVALUADOR: FIRMA DEL EVALUADOR:
INSTRUCCIONES
Estimado usuario: • Usted tiene en las manos un instrumento de evaluación que permitirá fundamentar las actividades que ha demostrado a
través de su desempeño o en la entrega de sus productos. • Conteste los siguientes planteamientos de manera clara. • Le recordamos tomar el tiempo necesario para contestar y desarrollar su contenido.
CÓDIGO ASPECTO
ROBC04 – R01
1. Identifica La construcción de matrices homogéneas compuestas., Ejemplo:
CUMPLE : SI NO
CUESTIONARIOCUESTIONARIOCUESTIONARIOCUESTIONARIO
ROBCROBCROBCROBC----00004444
29
(ROBC-04) CONTINUACIÓN…
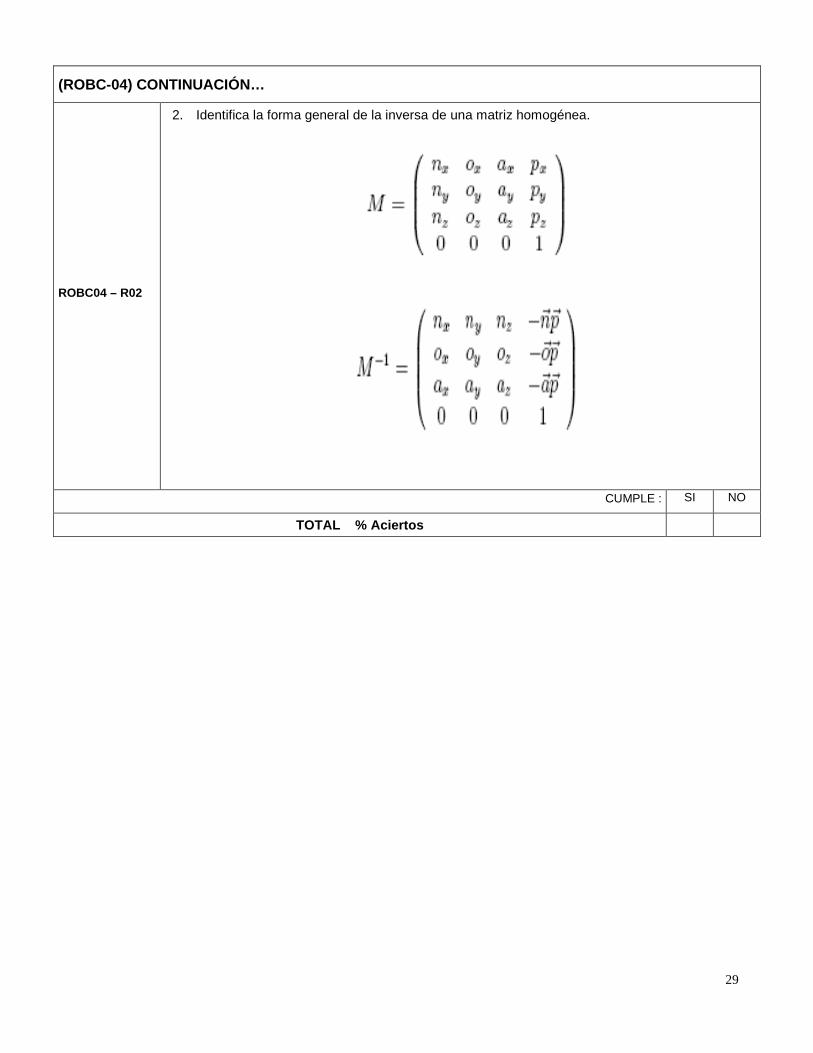
ROBC04 – R02
2. Identifica la forma general de la inversa de una matriz homogénea.
CUMPLE : SI NO
TOTAL % Aciertos

30
DATOS GENERALES DEL PROCESO DE EVALUACIÓN
NOMBRE DE LA ASIGNATURA,: ROBÓTICA I CODIGO:
NOMBRE DEL ALUMNO: FIRMA DEL ALUMNO:
MATRICULA:: CARRERA:: GRUPO: FECHA:
NOMBRE DEL EVALUADOR: FIRMA DEL EVALUADOR:
INSTRUCCIONES
Estimado usuario: • Usted tiene en las manos un instrumento de evaluación que permitirá fundamentar las actividades que ha demostrado a
través de su desempeño o en la entrega de sus productos. • Conteste los siguientes planteamientos de manera clara. • Le recordamos tomar el tiempo necesario para contestar y desarrollar su contenido.
CÓDIGO ASPECTO
ROBC05 – R01
1. Identifica el algoritmo D-H estándar.
CUMPLE : SI NO
CUESTIONARIOCUESTIONARIOCUESTIONARIOCUESTIONARIO
ROBCROBCROBCROBC----00005555

31
ROBC-05) CONTINUACIÓN…
ROBC05 – R02
2. Identifica el algoritmo D-H modificado.
CUMPLE : SI NO

32
ROBC-05) CONTINUACIÓN…
ROBC05 – R03
3. Identifica el Algoritmo D-H Estándar Vs Modificado.
UMPLE : SI NO
ROBC05 – R04 4. Explica la existencia del algoritmo D-H estándar y modificado que pueden encontrase en
distinta bibliografía y publicaciones.
CUMPLE : SI NO
TOTAL % Aciertos

33
DATOS GENERALES DEL PROCESO DE EVALUACIÓN
NOMBRE DE LA ASIGNATURA,: ROBÓTICA I CODIGO:
NOMBRE DEL ALUMNO: FIRMA DEL ALUMNO:
MATRICULA:: CARRERA:: GRUPO: FECHA:
NOMBRE DEL EVALUADOR: FIRMA DEL EVALUADOR:
INSTRUCCIONES
Estimado usuario: • Usted tiene en las manos un instrumento de evaluación que permitirá fundamentar las actividades que ha demostrado a
través de su desempeño o en la entrega de sus productos. • Conteste los siguientes planteamientos de manera clara. • Le recordamos tomar el tiempo necesario para contestar y desarrollar su contenido.
CÓDIGO ASPECTO
ROBC06 – R01
1. Identifica el problema de la cinemática inversa.
CUMPLE : SI NO
ROBC06 – R02
2. Explica la problemática inversa y su diferencia con la problemática directa.
a) cinemática inversa
El objetivo es encontrar los valores de las variables de junta que permitan alcanzar una determinada posición y orientación en el espacio cartesiano.
b) cinemática directa
Encontrar una matriz de transformación homogénea T que describa la posición y orientación cartesiana del efector final a partir del conocimiento de las variables y parámetros de junta.
CUMPLE : SI NO
CUESTIONARIOCUESTIONARIOCUESTIONARIOCUESTIONARIO
ROBCROBCROBCROBC----00006666

34
ROBC06 – R03
3. Calcula valores para 321 ,, qqq , empleando el método de aproximación directa, para la
figura mostrada.
CUMPLE : SI NO
TOTAL % Aciertos

35
DATOS GENERALES DEL PROCESO DE EVALUACIÓN
NOMBRE DE LA ASIGNATURA,: ROBÓTICA I CODIGO:
NOMBRE DEL ALUMNO: FIRMA DEL ALUMNO:
MATRICULA:: CARRERA:: GRUPO: FECHA:
NOMBRE DEL EVALUADOR: FIRMA DEL EVALUADOR:
INSTRUCCIONES
Estimado usuario: • Usted tiene en las manos un instrumento de evaluación que permitirá fundamentar las actividades que ha demostrado a
través de su desempeño o en la entrega de sus productos. • Conteste los siguientes planteamientos de manera clara.
• Le recordamos tomar el tiempo necesario para contestar y desarrollar su contenido. CÓDIGO ASPECTO
ROBC07 - R01
1. Identifica la obtención del Modelo Cinemático Inverso por aproximación geométrica.
a) Lo utiliza para obtener los valores de las primeras variables articulares, que son las que posicionan el robot (prescindiendo de la orientación de su extremo).
b) Utiliza relaciones geométricas y trigonométricas sobre los elementos del robot.
CUMPLE : SI NO
ROBC07- R02
2. Resuelve el problema planteado en la figura, usando el método de aproximación geométrica.
CUMPLE : SI NO
TOTAL % Aciertos
CUESTIONARIOCUESTIONARIOCUESTIONARIOCUESTIONARIO
ROBCROBCROBCROBC----00007777
36
DATOS GENERALES DEL PROCESO DE EVALUACIÓN
NOMBRE DE LA ASIGNATURA,: ROBÓTICA I CODIGO:
NOMBRE DEL ALUMNO: FIRMA DEL ALUMNO:
MATRICULA:: CARRERA:: GRUPO: FECHA:
NOMBRE DEL EVALUADOR: FIRMA DEL EVALUADOR:
INSTRUCCIONES
Estimado usuario: • Usted tiene en las manos un instrumento de evaluación que permitirá fundamentar las actividades que ha demostrado a
través de su desempeño o en la entrega de sus productos. • Conteste los siguientes planteamientos de manera clara. • Le recordamos tomar el tiempo necesario para contestar y desarrollar su contenido.
CÓDIGO ASPECTO
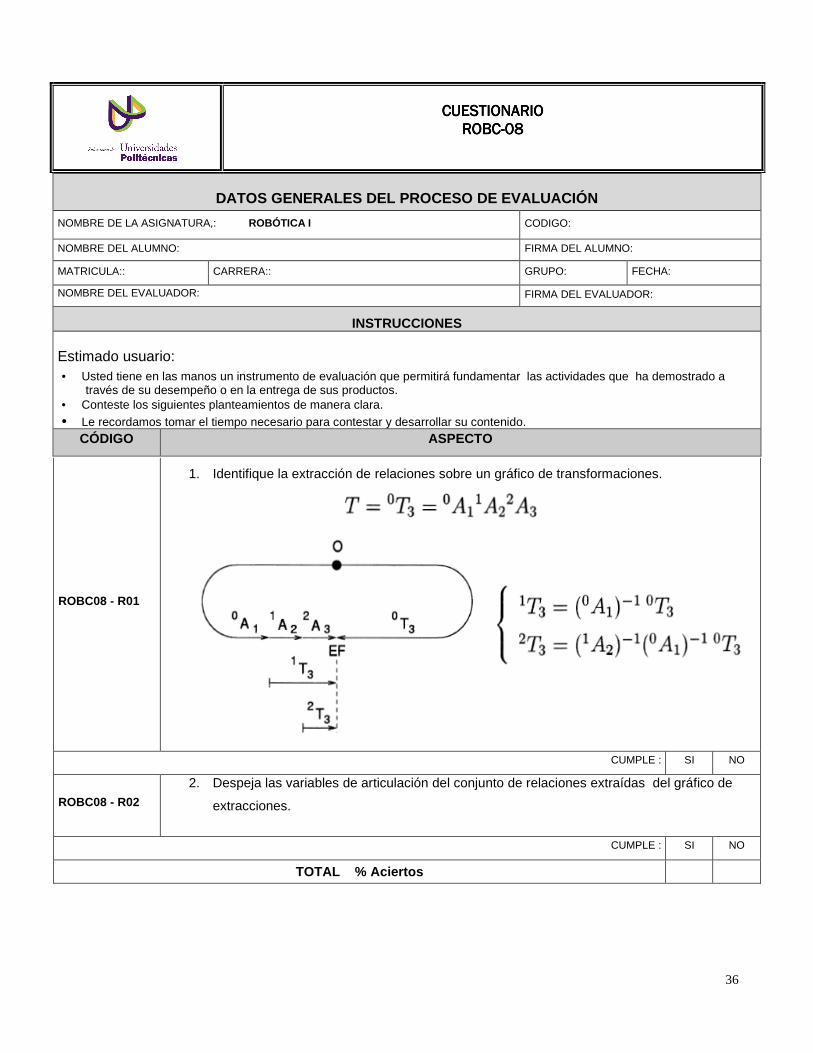
ROBC08 - R01
1. Identifique la extracción de relaciones sobre un gráfico de transformaciones.
CUMPLE : SI NO
ROBC08 - R02
2. Despeja las variables de articulación del conjunto de relaciones extraídas del gráfico de
extracciones.
CUMPLE : SI NO
TOTAL % Aciertos
CUESTIONARIOCUESTIONARIOCUESTIONARIOCUESTIONARIO
ROBROBROBROBCCCC----00008888

37
DATOS GENERALES DEL PROCESO DE EVALUACIÓN
NOMBRE DE LA ASIGNATURA,: ROBÓTICA I CODIGO:
NOMBRE DEL ALUMNO: FIRMA DEL ALUMNO:
MATRICULA:: CARRERA:: GRUPO: FECHA:
NOMBRE DEL EVALUADOR: FIRMA DEL EVALUADOR:
INSTRUCCIONES
Estimado usuario: • Usted tiene en las manos un instrumento de evaluación que permitirá fundamentar las actividades que ha demostrado a
través de su desempeño o en la entrega de sus productos. • Conteste los siguientes planteamientos de manera clara.
• Le recordamos tomar el tiempo necesario para contestar y desarrollar su contenido. CÓDIGO ASPECTO
ROBC09 - R01
1. Identifica que el Frame B es rotado con velocidad angular relativa al Frame A.
CUMPLE : SI NO
CUESTIONARIOCUESTIONARIOCUESTIONARIOCUESTIONARIO
ROBCROBCROBCROBC----9999

38
(ROBC-9) CONTINUACIÓN…
ROBC09 - R02
2. Identifica que el Frame B es trasladado con velocidad relativa al Frame A.
CUMPLE : SI NO
ROBC09 - R03
3. Identifica la velocidad de un punto debido a la rotación de un Frame de referencia.
CUMPLE : SI NO
TOTAL % Aciertos
39
DATOS GENERALES DEL PROCESO DE EVALUACIÓN
NOMBRE DE LA ASIGNATURA,: ROBÓTICA I CODIGO:
NOMBRE DEL ALUMNO: FIRMA DEL ALUMNO:
MATRICULA:: CARRERA:: GRUPO: FECHA:
NOMBRE DEL EVALUADOR: FIRMA DEL EVALUADOR:
INSTRUCCIONES
Estimado usuario: • Usted tiene en las manos un instrumento de evaluación que permitirá fundamentar las actividades que ha demostrado a través
de su desempeño o en la entrega de sus productos. • Conteste los siguientes planteamientos de manera clara. • Le recordamos tomar el tiempo necesario para contestar y desarrollar su contenido.
CÓDIGO ASPECTO
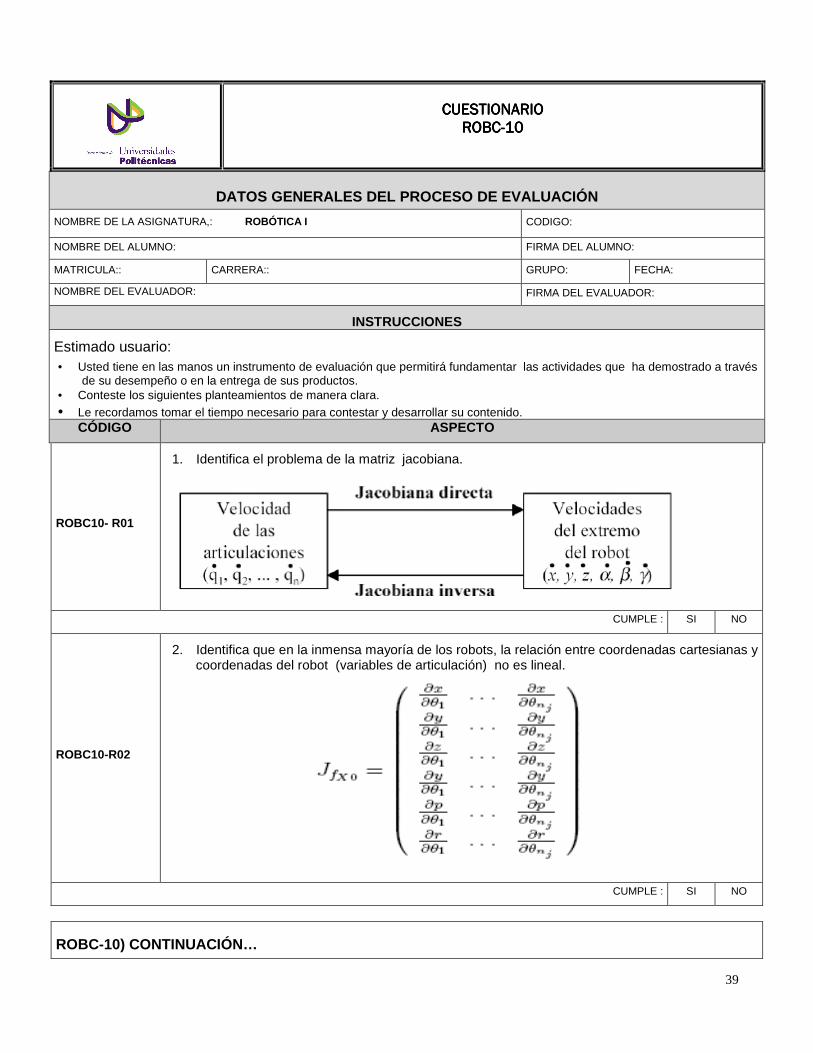
ROBC10- R01
1. Identifica el problema de la matriz jacobiana.
CUMPLE : SI NO
ROBC10-R02
2. Identifica que en la inmensa mayoría de los robots, la relación entre coordenadas cartesianas y coordenadas del robot (variables de articulación) no es lineal.
CUMPLE : SI NO
ROBC-10) CONTINUACIÓN…
CUESTIONARIOCUESTIONARIOCUESTIONARIOCUESTIONARIO
ROBCROBCROBCROBC----11110000

40
ROBC10 - R03
3. Identifica la utilidad del jacobiano de relacionar velocidades del espacio de articulaciones con velocidades cartesianas.
CUMPLE : SI NO
ROBC11 -R04
4. Identifica que el jacobiano en ele punto x tenga inversa.
CUMPLE : SI NO
TOTAL % Aciertos

41
DATOS GENERALES DEL PROCESO DE EVALUACIÓN
NOMBRE DE LA ASIGNATURA,: ROBÓTICA I CODIGO:
NOMBRE DEL ALUMNO: FIRMA DEL ALUMNO:
MATRICULA:: CARRERA:: GRUPO: FECHA:
NOMBRE DEL EVALUADOR: FIRMA DEL EVALUADOR:
INSTRUCCIONES
Estimado usuario: • Usted tiene en las manos un instrumento de evaluación que permitirá fundamentar las actividades que ha demostrado a través
de su desempeño o en la entrega de sus productos. • Conteste los siguientes planteamientos de manera clara. • Le recordamos tomar el tiempo necesario para contestar y desarrollar su contenido.
CÓDIGO ASPECTO
ROBC11 - R01
5. Identifica el balance fuerza estática – momento para un enlace.
CUMPLE : SI NO
TOTAL % Aciertos
CUESTIONARIOCUESTIONARIOCUESTIONARIOCUESTIONARIO
ROBCROBCROBCROBC----11111111

42
DATOS GENERALES DEL PROCESO DE EVALUACIÓN
NOMBRE DE LA ASIGNATURA,: ROBÓTICA I CODIGO:
NOMBRE DEL ALUMNO: FIRMA DEL ALUMNO:
MATRICULA:: CARRERA:: GRUPO: FECHA:
NOMBRE DEL EVALUADOR: FIRMA DEL EVALUADOR:
INSTRUCCIONES
Revise los documentos o actividades que se solicita n; marque “SI” cuando la evidencia a evaluar se cumple; y “NO” en caso contrario. En la columna de “OBSERVACIONES ” registre los datos relevantes asociados a la evaluación.
ACTIVIDAD 1 Dar al alumno ejercicios que permitan desarrollar la habilidad, para identificar los tipos de articulaciones.
Ejemplo:
Articulaciones a) Esférica o rotula. b) Planar. c) Tornillo d) Prismática e) Rotación. f) Cilíndrica
CÓDIGO ITEM SI NO OBSERVACIONES
ROBEP01 – R01 1. Identifica de manera correcta, cada una de los tipos de articulación utilizadas en la robótica.
ROBEP01 – R02 2. Identifica de manera correcta, el movimiento de rotación y traslación en una articulación.
ROBEP01 – R03 3. Identifica de manera correcta, los grados de libertad en una articulación.
EJERCICIO PRÁCTICOEJERCICIO PRÁCTICOEJERCICIO PRÁCTICOEJERCICIO PRÁCTICO
ROBROBROBROBEPEPEPEP----00001111

43
(ROBEP-01) CONTINUACIÓN…
ACTIVIDAD 2 Dar al alumno ejercicios que permitan desarrollar la habilidad, para identificar los tipos de configuraciones.
Ejemplo:
Config uraciones a) Cartesiana. b) Cilíndrica. c) Esférica o polar. d) SCARA e) Angular o antropomórfica.
CÓDIGO ITEM SI NO OBSERVACIONES
ROBEP01 – R04 4. Identifica de manera correcta, las configuraciones utilizadas en la robótica.
ROBEP01 – R05 5. Identifica de manera correcta, los movimientos de
rotación o traslación según sea el caso, en cada una de las configuraciones.

44
DATOS GENERALES DEL PROCESO DE EVALUACIÓN
NOMBRE DE LA ASIGNATURA,: ROBÓTICA I CODIGO:
NOMBRE DEL ALUMNO: FIRMA DEL ALUMNO:
MATRICULA:: CARRERA:: GRUPO: FECHA:
NOMBRE DEL EVALUADOR: FIRMA DEL EVALUADOR:
INSTRUCCIONES
Revise los documentos o actividades que se solicita n; marque “SI” cuando la evidencia a evaluar se cumple; y “NO” en caso contrario. En la columna de “OBSERVACIONES ” registre los datos relevantes asociados a la evaluación.
ACTIVIDAD 1 Dar al alumno ejercicios que permitan desarrollar la habilidad, para realizar la clasificación de robots por los institutos mundiales.
Ejemplo:
Realizar las siguientes clasificaciones:
Robots RIA JIRA AFRI a) Manipulador simple. b) Manipulador manual. c) Manipulador secuencial. d) Robots secuénciales. e) Manipulador automático. f) Robot de aprendizaje. g) Robot programable. h) Robot con control numérico. i) Robot inteligente.
CÓDIGO ITEM SI NO OBSERVACIONES
ROBEP02 – R01 1. Identifica el tipo de robot de manera correcta.
ROBEP02 – R02 2. Explica de manera clara la definición de cada uno de estos.
ROBEP02 – R03 3. Identifica los criterios de clasificación de los robots por estos organismos.
EJERCICIO PRÁCTICOEJERCICIO PRÁCTICOEJERCICIO PRÁCTICOEJERCICIO PRÁCTICO
ROBEPROBEPROBEPROBEP----00002222

45
DATOS GENERALES DEL PROCESO DE EVALUACIÓN
NOMBRE DE LA ASIGNATURA,: ROBÓTICA I CODIGO:
NOMBRE DEL ALUMNO: FIRMA DEL ALUMNO:
MATRICULA:: CARRERA:: GRUPO: FECHA:
NOMBRE DEL EVALUADOR: FIRMA DEL EVALUADOR:
INSTRUCCIONES
Revise los documentos o actividades que se solicita n; marque “SI” cuando la evidencia a evaluar se cumple; y “NO” en caso contrario. En la columna de “OBSERVACIONES ” registre los datos relevantes asociados a la evaluación.
ACTIVIDAD 1 Dar al alumno ejercicios que permitan desarrollar la habilidad de la numeración de eslabones y articulaciones en una cadena cinemática abierta
. Ejemplo:
CÓDIGO ITEM SI NO OBSERVACIONES
ROBEP03 – R01 1. La numeración de enlaces en una cadena abierta es correcta.
ROBEP03 – R02 2. La numeración de uniones en una cadena abierta es correcta.
EJERCICIO PRÁCTICOEJERCICIO PRÁCTICOEJERCICIO PRÁCTICOEJERCICIO PRÁCTICO
ROBEPROBEPROBEPROBEP----00003333

46
DATOS GENERALES DEL PROCESO DE EVALUACIÓN
NOMBRE DE LA ASIGNATURA,: ROBÓTICA I CODIGO:
NOMBRE DEL ALUMNO: FIRMA DEL ALUMNO:
MATRICULA:: CARRERA:: GRUPO: FECHA:
NOMBRE DEL EVALUADOR: FIRMA DEL EVALUADOR:
INSTRUCCIONES
Revise los documentos o actividades que se solicita n; marque “SI” cuando la evidencia a evaluar se cumple; y “NO” en caso contrario. En la columna de “OBSERVACIONES ” registre los datos relevantes asociados a la evaluación.
ACTIVIDAD 1 Dar al alumno ejercicios que permitan desarrollar la habilidad, para encontrar loe parámetros D-H.
Ejemplo:
Articulación id ia iα iθ
1 2 3 4
CÓDIGO ITEM SI NO OBSERVACIONES
ROBEP04 – R01
1 Identifica la distancia id , entre los puntos de
intersección de la normal a los ejes i/i+1 con el eje i, y la normal a los ejes i-1/i también con el eje, medida a lo largo de este eje, es correcta.
ROBEP04 – R02 2 Identifica la mínima distancia ia (perpendicular) ,
entre el eje de la articulación i y el eje i+1, es correcta.
ROBEP04 – R03
3 Identifica el ángulo iα , que forman el eje i y el eje
i+1, medido en un plano perpendicular al segmento ia , es correcta.
ROBEP04 – R04 4 Identifica el ángulo iθ entre la normal a los ejes i-
1/i y la normal a los ejes i/i+i, medido en un plano perpendicular al eje i, es correcta.
EJERCICIO PRÁCTICOEJERCICIO PRÁCTICOEJERCICIO PRÁCTICOEJERCICIO PRÁCTICO
ROBEPROBEPROBEPROBEP----00004444

47
DATOS GENERALES DEL PROCESO DE EVALUACIÓN
NOMBRE DE LA ASIGNATURA,: ROBÓTICA I CODIGO:
NOMBRE DEL ALUMNO: FIRMA DEL ALUMNO:
MATRICULA:: CARRERA:: GRUPO: FECHA:
NOMBRE DEL EVALUADOR: FIRMA DEL EVALUADOR:
INSTRUCCIONES
Revise los documentos o actividades que se solicita n; marque “SI” cuando la evidencia a evaluar se cumple; y “NO” en caso contrario. En la columna de “OBSERVACIONES ” registre los datos relevantes asociados a la evaluación.
ACTIVIDAD 1 Dar al alumno ejercicios que permitan desarrollar la habilidad, para la obtención del modelo cinemática inverso. Ejemplo:Obtener los siguientes parámetros:
Variables nq ...1 Valor de la variable
Articulaciones prismáticas (distancias) Articulaciones resolutas (ángulos) Coordenadas de la posición del extremo del robot
x y z Ángulos de orientación del extremo del robot α β
γ Grados de libertad n
CÓDIGO ITEM SI NO OBSERVACIONES
ROBEP05 – R01 Identifica el tipo y cantidad de articulaciones, de manera correcta.
ROBEP05 - R02 Identifica las coordenadas x, y, z en la posición extrema del robot, de manera correcta.
ROBEP05 – R03 Identifica los ángulos de orientación α , β , γ en la
posición extrema del robot, de manera correcta.
ROBEP05 – R04 Identifica la cantidad correcta de grados de libertad de la cadena articulada.
EJERCICIO PRÁCTICOEJERCICIO PRÁCTICOEJERCICIO PRÁCTICOEJERCICIO PRÁCTICO
ROBEPROBEPROBEPROBEP----00005555

48
GLOSARIOGLOSARIOGLOSARIOGLOSARIO
AAAA Accesibilidad. Un punto del espacio es totalmente accesible si el punto Terminal del manipulador puede situarse en él, en todas las orientaciones que su construcción mecánica Adaptabilidad. Capacidad de ejecutar tareas en ambientes variables sin asistencia. Área de trabajo lineal. Es la superficie plana sobre la cual el robot puede manipular objetos. Articulaciones. Formadas por eslabones unidos entre si mediante juntas. Autómata. Máquina que imita la figura y movimientos de un ser animado BBBB Brazo articulado. Emula las principales características de un brazo humano pero, a diferencia del brazo humano, cada articulación posee un grado de libertad. CCCC Cadena Cinemática Abierta. Se dice que una cadena cinemática es abierta si, numerando secuencialmente los enlaces desde el primero, cada enlace está conectado mediante articulaciones exclusivamente al enlace anterior, y al siguiente, excepto el primero, que se suele fijar al suelo, y el último, uno de cuyos extremos queda libre. Cinemática. Es la ciencia que trata el movimiento de los objetos sin tener en cuenta las fuerzas o momentos que lo producen. Coordenadas de los movimientos. Es el tipo de sistema de posicionamiento y orientación del elemento Terminal del robot. Camino. Una sucesión de puntos en el espacio. Capacidad de carga. Es el peso máximo que el robot puede manipular. Características morfológicas. Describen las características más relevantes propias de los robots y proporcionan valores concretos de las mismas, para determinados modelos y aplicaciones.

49
DDDD Dextrógiro. El tercer eje es producto de los otros dos. EEEE Eje de una articulación. Es la recta definida como la dirección de desplazamiento, en articulaciones trasnacionales; el eje de giro, en articulaciones rotacionales. Elemento final (EF). Son los encargados de interactuar directamente con el entorno del robot. Elemento de sujeción. Pinzas, ventosas, ganchos, imanes, etc. Estructura mecánica. Mecánicamente un robot está formado por una serie de elementos o eslabones unidos mediante articulaciones que Permiten un movimiento relativo entre cada dos eslabones consecutivos. FFFF Frame. Conjunto de 4 vectores que dan información de posición y orientación. GGGG Grado de automatismo. Capacidad de ejecutar tareas sin recurrir a un operador humano. Grados de libertad. Son los parámetros que se precisan para determinar la posición y la orientación del elemento terminal del manipulador. Grado de movilidad. Es el número de articulaciones independientes que posee. HHHH Herramientas. Soldadura por puntos, atornillador, pistola de pintura, bisturí, cámaras, etc. LLLL Localización. Conocimiento de las coordenadas respecto a un sistema de referencia. Locomoción. Es la facultad de un robot para poder desplazarse, de
50
un lugar a otro. Los robots con capacidad locomotiva se llaman robots móviles. MMMM Manipulación. Es la capacidad de actuar sobre los objetos, trasladándolos o modificándolos. Esta área se centra en la construcción de manipuladores y brazos robóticos. Manipulador. Consiste en una secuencia de cuerpos rígidos, llamados enlaces que se conectan unos a otros mediante articulaciones. Todos juntos forman una cadena cinemática. Matriz Homogénea. Relaciona la posición y orientación del extremo del robot respecto a su sistema de referencia fijo (base del robot). Método de Denavit – Hartenberg. Método sistemático para resolver el problema cinemático directo. Modelo diferencial (matriz jacobiana). Parte de la cinemática que intenta obtener las relaciones entre las velocidades del movimiento de las articulaciones y las del extremo del robot. Multifuncionalidad. El robot debe ser lo suficientemente versátil como para ejecutar tareas diversas, no previstas a priori por su diseñador. OOOO Ortonormal. Sistema de referencia rectilíneo, con sus tres ejes perpendiculares dos a dos y las longitudes de los vectores básicos son iguales. PPPP Parámetros de enlace. Se les define así a los siguientes parámetros
),,,( iiii ad αθ . Polivalencia. Capacidad de ejecutar diferentes clases de acciones o tareas. Precisión repetitiva. Es la capacidad de volver a situarse la mano en un punto determinado un número indefinido de veces. Programabilidad. La capacidad de cambiar de una tarea a otra sin más que cambiar el programa (la secuencia de instrucciones) que debe ejecutar.

51
RRRR Región espacial de trabajo. Es el volumen en el cual el robot puede manipular objetos. Se define según las coordenadas de programación. Robot. Un manipulador reprogramable multifuncional, diseñado para mover material, partes, herramientas o dispositivo especializado mediante movimientos programados variables para la ejecución de tareas diversas. Robot de exploración. Usado para obtener datos acerca de terreno desconocido, pueden ser de exploración terrestre, minera, oceánica, espacial, etc. Robot de producción. Usado para la manufactura de bienes, pueden a su vez ser de manipulación, de fabricación, de ensamblado y de prueba. Robot de rehabilitación. Usados para ayudara a discapacitados, pueden ser una prolongación de la anatomía, o sustituir completamente la función del órgano perdido. Robótica. Es la ciencia que estudia los robots como sistemas que operan en algún entorno real, estableciendo algún tipo de conexión inteligente entre percepción y acción. SSSS Sensores internos. Conocimiento de su propio estado. Sensores externos. Conocimiento del estado de su entorno. TTTT Tipo de actuador. Es el tipo del elemento motriz que genera los movimientos de las articulaciones del robot. Transmisiones. Son los elementos encargados de transmitir el movimiento desde los actuadores hasta as articulaciones. Trayectoria. Un camino con restricciones temporales.
52
VVVV Variables de articulación. iθ para las articulaciones de revolución,
id para las articulaciones lineales. Velocidad. Es la rapidez con que trabaja el robot, una medida de su rendimiento.

53
BIBLIOGRAFÌABIBLIOGRAFÌABIBLIOGRAFÌABIBLIOGRAFÌA
1. Introduction to robotics: Mechanics and control, J.J. Craig (1989 -2005),
Prentice-Hall: Second and Third Edition. 2. Fundamentos de Robótica, A. Barrientos, L. F. Peñin, C. Balaguer, y R. Aracil,
(Primera edición en español), McGraw-Hill. 3. Robótica Industrial, M. P. Groover, M. Weiss, R. N. Nagel, N. G. Odrey (1989),
McGraw-Hill. 4. Robot Manipulator, R. P. Paul (1981), MIT Press 5. Robótica; Manipuladores y Robots Móviles, Aníbal Ollero Baturone (2001),
Marcombo. 6. Robotic engineering: And Integrated Approach, R. D. Klafter, T. A. Chmielewski,
M. Negin, Prentice-Hall. 7. Introdution to Robotics. Philip J. Mckerrow, Addison Wesley. 8. Robotics Toolbox for use with Matlab, Corke, P. (1996), Preston, Australia 9. Analytical Robotics and Mechatronics, Stadler, W. (1995), McGraw-Hill.