mit rov team michelle aquing, heather brundage, lauren cooney, bridget downey, eddie huo, albert...
TRANSCRIPT

MIT ROV TEAMMIT ROV TEAM
Michelle Aquing, Heather Brundage, Michelle Aquing, Heather Brundage, Lauren Cooney, Bridget Downey, Eddie Lauren Cooney, Bridget Downey, Eddie
Huo, Albert Kwon, Harry Lichter, M. Huo, Albert Kwon, Harry Lichter, M. Jordan Stanway, Kurt Stiehl, Jordan Stanway, Kurt Stiehl,
ThaddeusStefanov-ThaddeusStefanov-Wagner, Daniel WalkerWagner, Daniel Walker

GoalsGoals
• Build a highly maneuverable vehicle capable Build a highly maneuverable vehicle capable of operating in confined spaces at depth.of operating in confined spaces at depth.– Small size (~ 1 foot cube)Small size (~ 1 foot cube)– Small tetherSmall tether
• Able to complete mission tasks:Able to complete mission tasks:– Re-establish the communications link to the Re-establish the communications link to the
science packagescience package– Retrieve data probes located within a drawer on Retrieve data probes located within a drawer on
the science package.the science package.– Collect a sample of red fluid from the crevice.Collect a sample of red fluid from the crevice.– Measure the temperature of the venting fluid.Measure the temperature of the venting fluid.
Power SupplyPower Supply
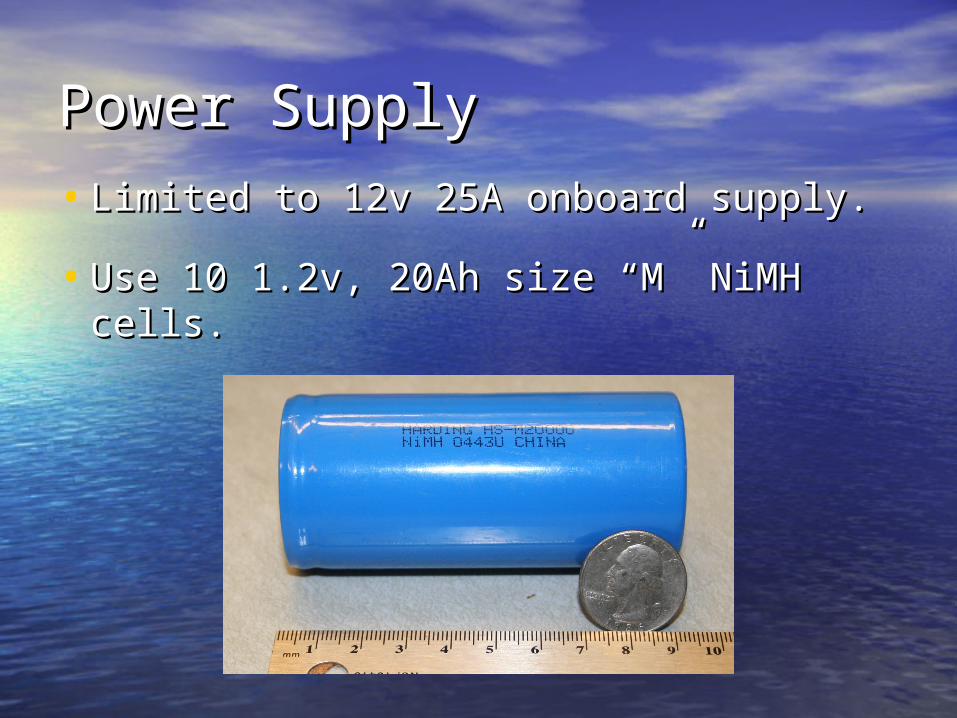
• Limited to 12v 25A onboard supply.Limited to 12v 25A onboard supply.
• Use 10 1.2v, 20Ah size “M” NiMH Use 10 1.2v, 20Ah size “M” NiMH cells.cells.
Battery PacksBattery Packs
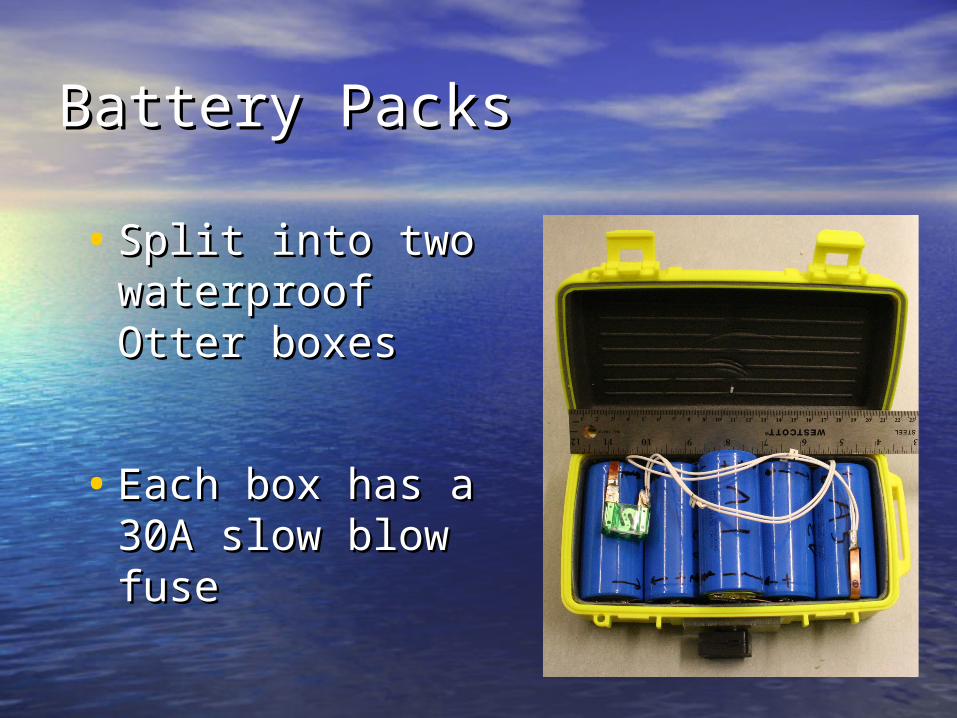
• Split into two Split into two waterproof Otter waterproof Otter boxesboxes
• Each box has a Each box has a 30A slow blow 30A slow blow fusefuse
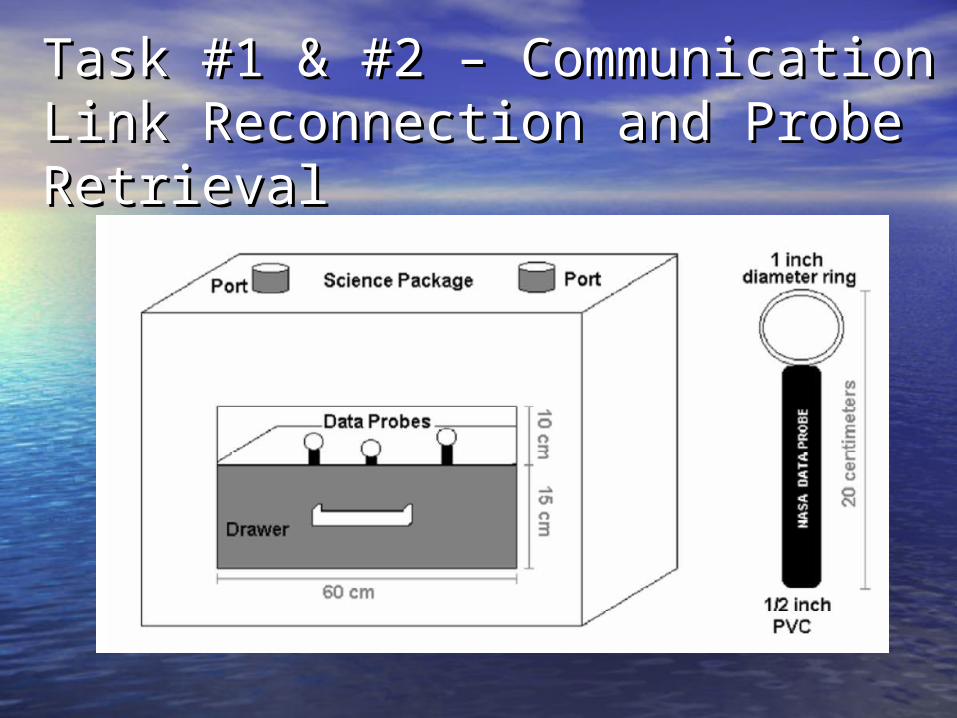
Task #1 & #2 – Communication Task #1 & #2 – Communication Link Reconnection and Probe Link Reconnection and Probe RetrievalRetrieval

Task #3 – Fluid CollectionTask #3 – Fluid Collection• Bag collection systemBag collection system
– no change in buoyancyno change in buoyancy– little pumping resistancelittle pumping resistance– passive dummy/sample passive dummy/sample
separationseparation
• Windshield washer pumpWindshield washer pump– Small internal volumeSmall internal volume– Little initial dilutionLittle initial dilution
Task #4 – Temperature Task #4 – Temperature MeasurementMeasurement
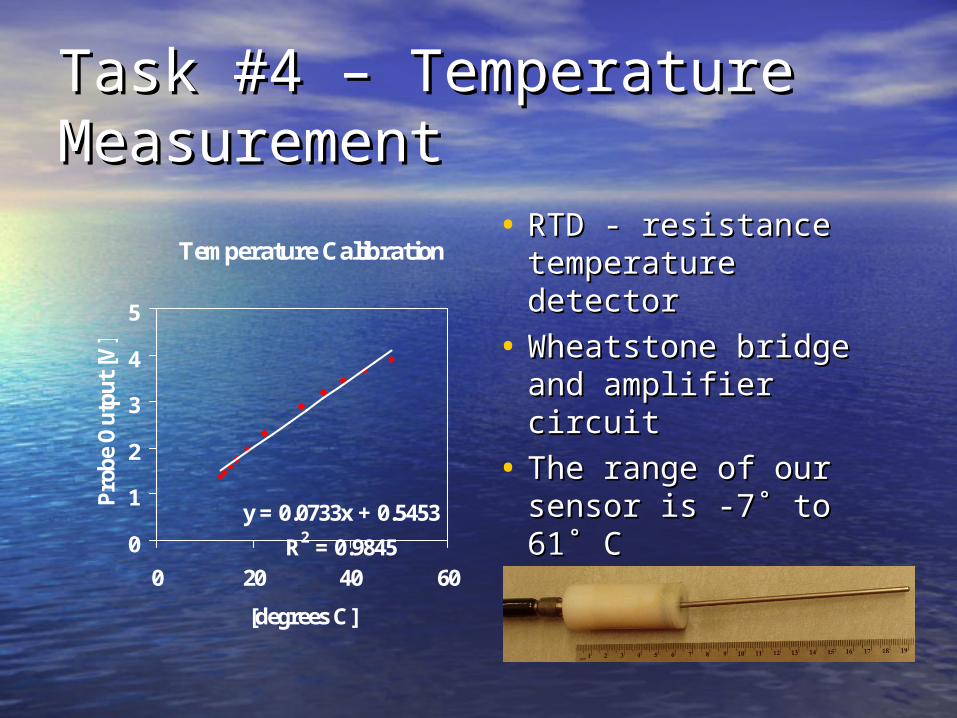
• RTD - resistance RTD - resistance temperature temperature detectordetector
• Wheatstone bridge Wheatstone bridge and amplifier circuitand amplifier circuit
• The range of our The range of our sensor is -7˚ to 61˚ Csensor is -7˚ to 61˚ C
Temperature Calibration
y = 0.0733x + 0.5453
R2 = 0.98450
1
2
3
4
5
0 20 40 60
[degrees C]
Pro
be O
utpu
t [V
]

Switching Video SystemSwitching Video System
• 4 color cameras 4 color cameras with LED lightswith LED lights
• 2 channels of video 2 channels of video up fiber tetherup fiber tether
• 2 computer 2 computer playback cards for playback cards for portabilityportability
• 1 switching board 1 switching board underwaterunderwater

SchematicSchematic
Video System AdvantagesVideo System Advantages
• Choose any two Choose any two camerascameras
• Small in sizeSmall in size
• Not need additional Not need additional expensive displaysexpensive displays
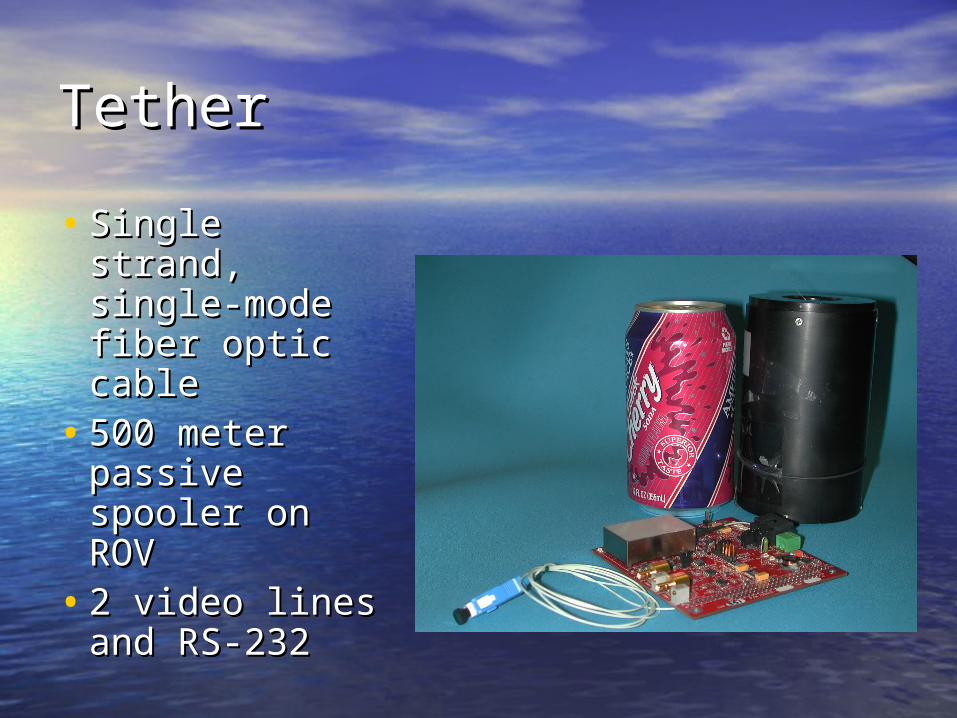
TetherTether
• Single strand, Single strand, single-mode single-mode fiber optic fiber optic cablecable
• 500 meter 500 meter passive passive spooler on spooler on ROVROV
• 2 video lines 2 video lines and RS-232and RS-232
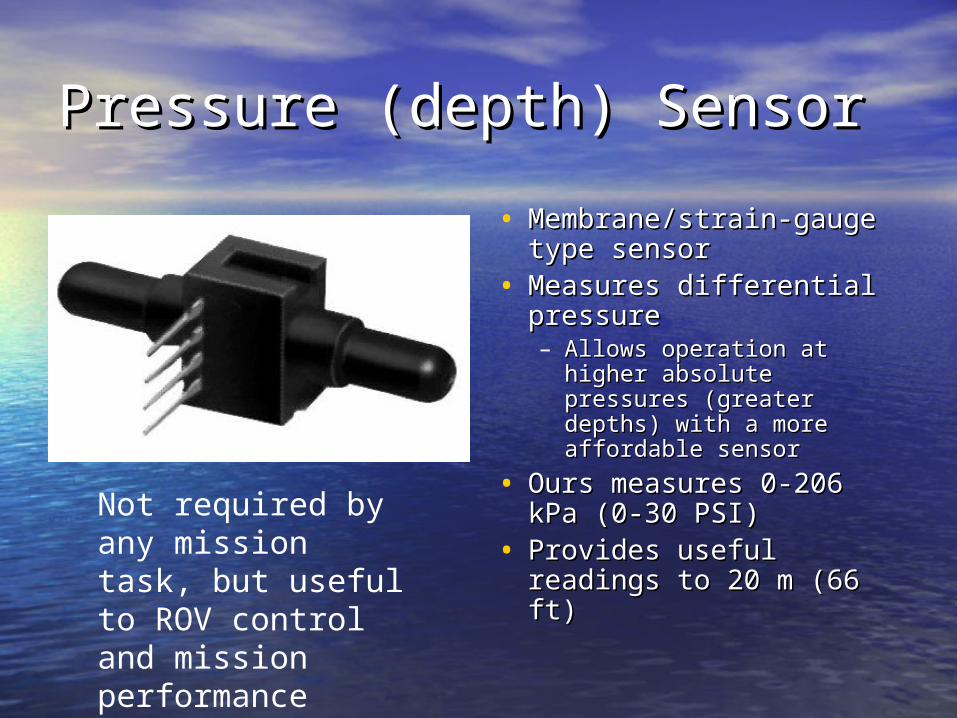
Pressure (depth) SensorPressure (depth) Sensor
• Membrane/strain-Membrane/strain-gauge type sensorgauge type sensor
• Measures differential Measures differential pressurepressure– Allows operation at Allows operation at
higher absolute higher absolute pressures (greater pressures (greater depths) with a more depths) with a more affordable sensoraffordable sensor
• Ours measures 0-206 Ours measures 0-206 kPa (0-30 PSI)kPa (0-30 PSI)
• Provides useful Provides useful readings to 20 m (66 ft)readings to 20 m (66 ft)
Not required by any mission task, but useful to ROV control and mission performance
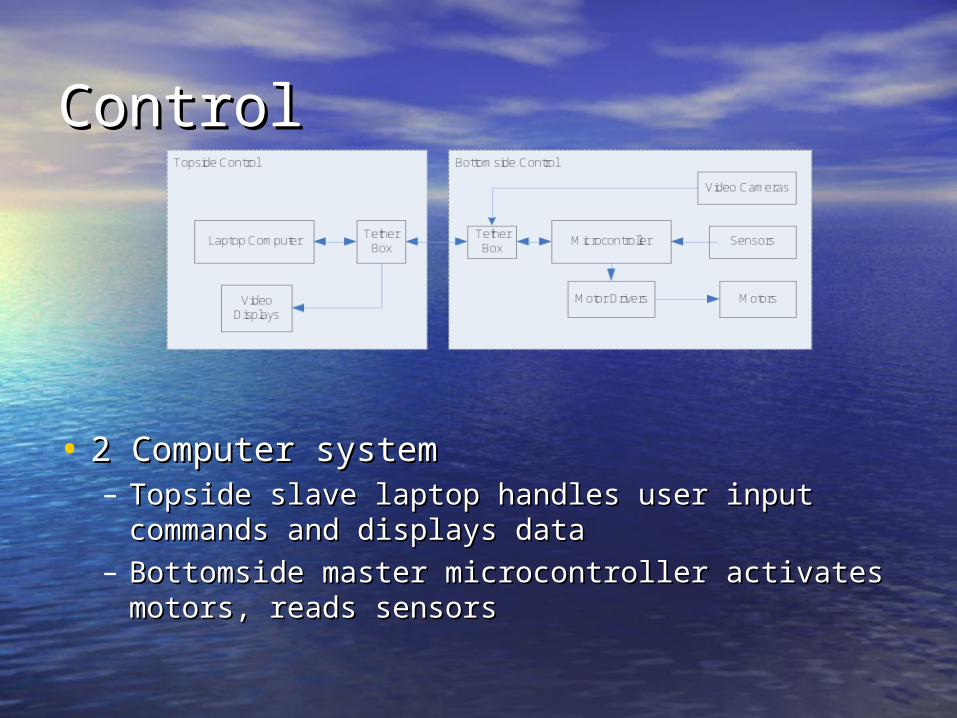
ControlControl
• 2 Computer system2 Computer system– Topside slave laptop handles user input Topside slave laptop handles user input
commands and displays datacommands and displays data– Bottomside master microcontroller activates Bottomside master microcontroller activates
motors, reads sensorsmotors, reads sensors
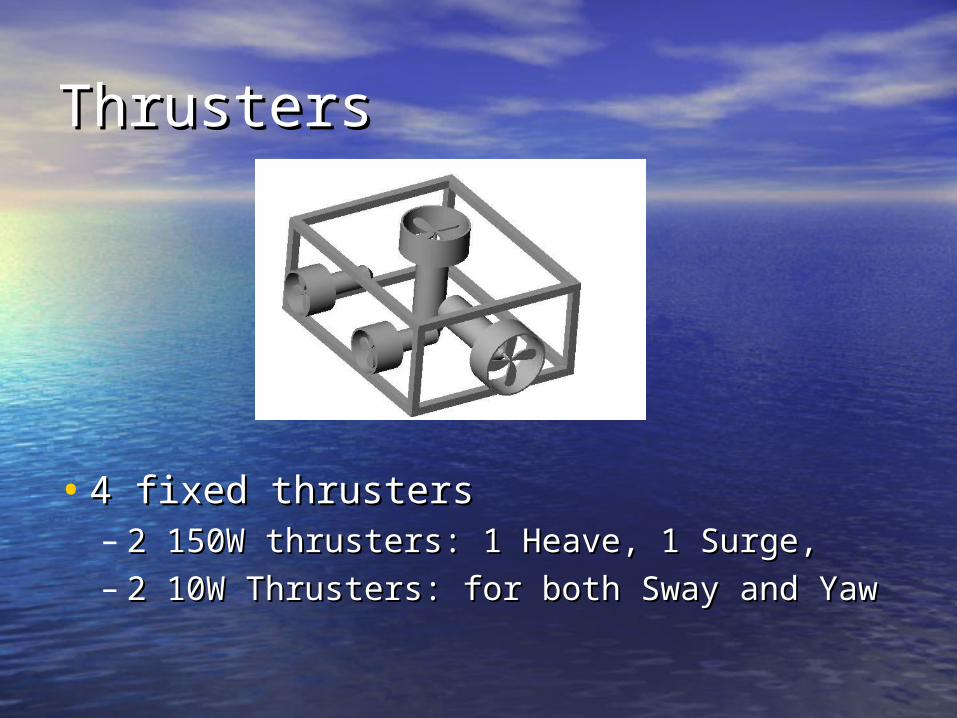
ThrustersThrusters
• 4 fixed thrusters 4 fixed thrusters – 2 150W thrusters: 1 Heave, 1 Surge, 2 150W thrusters: 1 Heave, 1 Surge, – 2 10W Thrusters: for both Sway and Yaw2 10W Thrusters: for both Sway and Yaw
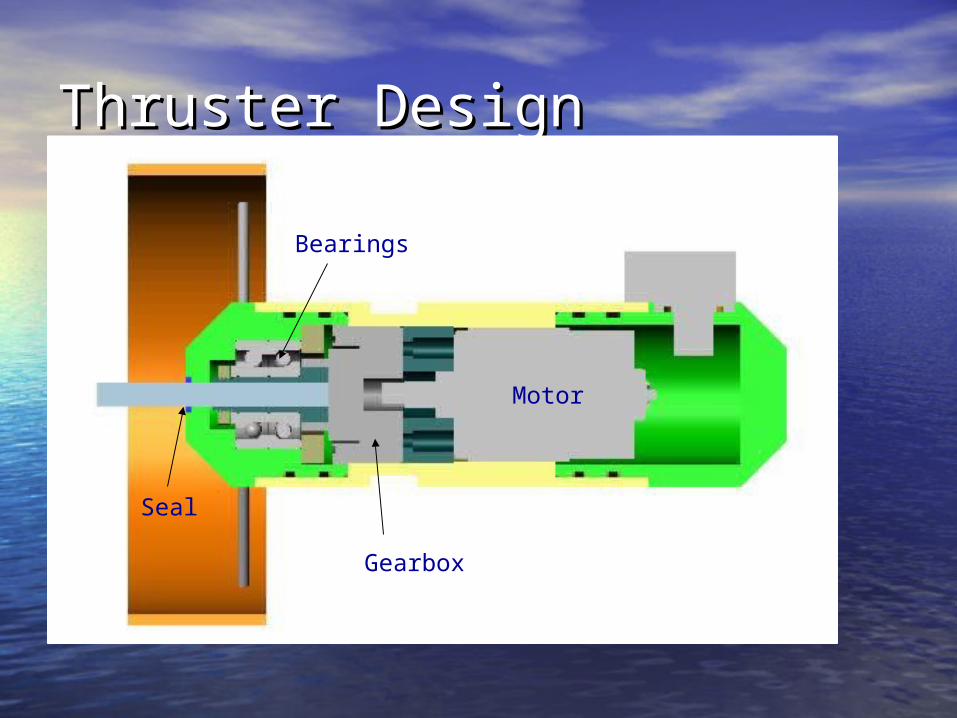
Thruster DesignThruster Design
Motor
Gearbox
Bearings
Seal
Frame and FloatationFrame and Floatation
• 80-20 frame for modularity80-20 frame for modularity
• Donated structural polyurethane Donated structural polyurethane foamfoam
Thank You!Thank You!
• Prizm, IncPrizm, Inc• ExxonMobilExxonMobil• MIT Edgerton CenterMIT Edgerton Center• MIT Center for Ocean EngineeringMIT Center for Ocean Engineering• MIT SeaGrantMIT SeaGrant• MIT Ocean Engineering Teaching LabMIT Ocean Engineering Teaching Lab• MIT Edgerton Center Student ShopMIT Edgerton Center Student Shop• Phoenix InternationalPhoenix International