meccanica del punto materiale dinamica - welcome to …personalpages.to.infn.it/~gbosia/ scienze...
TRANSCRIPT

Lezione 3Lezione 3
Meccanica del punto materialeDinamica

• Un corpo varia la sua condizione di moto perché interagisce con il mondo circostante che lo sottomette a forze.
• Che cos’e’ una forza?
• Forza: grandezza fisica vettoriale (modulo, direzione e verso) che esprime e misura l’ interazione tra corpi
Esempi di forza :
• Forza gravitazionale due corpi posti ad una distanza d si attraggono con una forza:
• Forza elettrostatica esercitata fra cariche elett riche
• Forze atomiche e molecolari forze (di tipo elettro statico) esercitate tra componenti nuclei atomici ed orbitali elettronici
• Forze nucleari e sub-nucleari: forze tra compone nti del nucleo
• Interazioni forti
• Interazioni deboli
Forze Forze
G = 6.67 10-11 N m2/kg2
F
d
221
d
mmGFG =
221
d
qqCFE = C = 9.01 109 N m2/C2
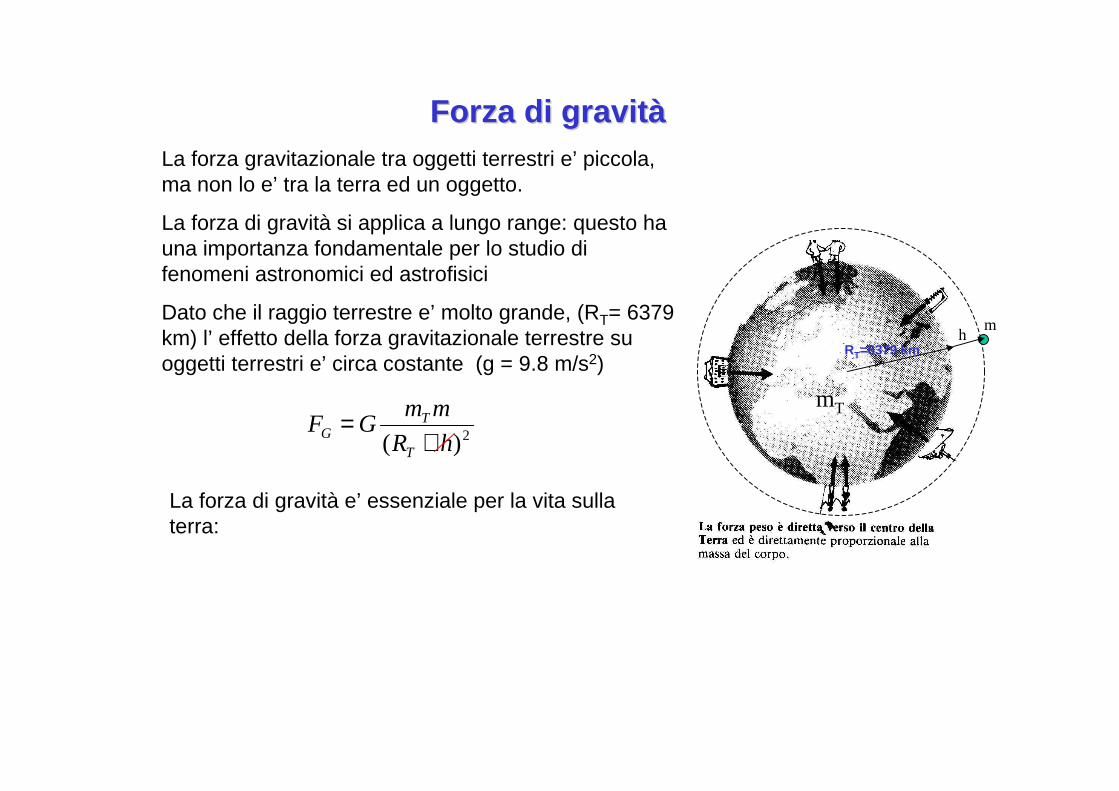
Forza di gravitàForza di gravitàLa forza gravitazionale tra oggetti terrestri e’ piccola, ma non lo e’ tra la terra ed un oggetto.
La forza di gravità si applica a lungo range: questo ha una importanza fondamentale per lo studio di fenomeni astronomici ed astrofisici
Dato che il raggio terrestre e’ molto grande, (RT= 6379 km) l’ effetto della forza gravitazionale terrestre su oggetti terrestri e’ circa costante (g = 9.8 m/s2)
2)( hR
mmGF
T
TG +
=
RT=6379 kmh
m
mT
La forza di gravità e’ essenziale per la vita sulla terra:

Leggi della dinamicaLeggi della dinamica
Ia legge Un corpo rimane in uno stato di quiete o di moto rettilineo uniforme (accelerazione nulla) fino a qu ando non sono ad esso applicate forze che ne modifichino la condizione di moto
IIa legge La variazione della velocità di un corpo in modulo e/o direzione e’ dovuta alla presenza di una forza. L’accelerazione acquisita dal corpo e’ proporzional e alla forza (attraverso una costante detta massa del corpo).
IIIa legge Se un corpo A esercita una forza F AB su un corpo B, il corpo B reagisce esercitando un forza F BA sul corpo A ed e’ FAB = - FBA con la stessa retta di azione
La Dinamica studia quale e’ la relazione tra le forze applicate al corpo e le sue condizioni di moto.
aF m=

Commenti alla ICommenti alla I a a leggelegge
Sistema in equilibrio
Una applicazione della Ia legge e’ il concetto di sistema in equilibrio.
Un sistema (puntiforme) si dice in equilibrio (o a riposo) quando la somma vettoriale delle forze applicate e’ nulla e la sua velocità iniziale e’ nul la(corpo isolato).
Le condizioni di equilibrio di un corpo sono studiate nella statica
L’equilibrio può essere stabile, instabile o neutro a seconda del comportamento del corpo quando e’ spostato dalla posizione di equilibrio.
La prima legge di Newton e’ vera solo per osservatori “ inerziali” ovvero che soddisfano a certe condizioni di moto. Infatti le osservazioni del moto di un oggetto e’ “relativo” a quello dell’osservatore. Due osservatori possono essere in condizioni di moto diverse e non pertanto non essere d’accordo su ciò che misurano.
Il concetto di relatività dello spazio-tempo e la meccanica relativistica (Einstein - 1905) sono stati alla base dello sviluppo della fisica moderna ed hanno un ruolo fondamentale per la spiegazione di fenomeni nucleari e di fenomeni astrofisici, in cui le velocità dei corpi sono abbastanza vicine alla velocità della luce nel vuoto c0 = 300,000 Km/sec.

Composizione di forze. Equilibrio statico Composizione di forze. Equilibrio statico
NFFF .........., 11
NFFFR ++= ..........21
0..........21 =+ NFFF
θ
1
2
3
3
1
1
2
• Se ad un corpo puntiforme sono applicate due o più forze, questo si muove come se gli fosse applicata una sola forza (risultante) pari alla somma vettoriale delle forze (componenti).
• Se la risultante delle forze e’ nulla il corpo si dice in equilibrio statico
• Esempio: calcolare direzione e modulo della forza F3 che mantiene in equilibrio statico il corpo P, sottoposto alle forzeF1 e F2.
• Condizione di equilibrio:
• componenti lungo l’ asse x dato che
• componenti lungo l’ asse x
0..........21 =+ NFFF
0
0
321
32
=++=+
yyy
xx
FFF
FF 01 =xF
0)cos()cos(
0)sin()sin(
321
32
=++−=+−
φθφθ
FFF
FF )cos(
)sin()tan(
21
2
θθφ
FF
F
−=
)sin(
)sin(23 φ
θFF =
φ
P

Azione dinamica di una forza
Se il moto e’ rettilineo uniforme pertanto : risultante delle forze nulla
Se il moto e’ uniformemente accelerato: ; : risultante delle forze costante
Se il moto e’ piano e curvilineo: Il corpo e’ soggetto ad una forza
tangenziale ed a una forza normale (centripeta)
IIa legge Se ad un corpo e’ applicata una forza non nulla, es so acquista una accelerazione nella stessa direzione e verso della forza, con modulo proporzionale alla forza.
La costante di proporzionalità si chiama massa del corpo
Dimensioni fisiche della forza [F] = [m] [a] =kgm/s2
Unità di forza SI : Newton >>>> 1kg 1m 1s-2
Commenti alla Commenti alla IIIIaa leggelegge
2
2
dt
dm
dt
dmm
rvaF ===
0=a 0=F
0aa = 0aF m=
Tudt
dvm Nu
R
vm
2NT R
vm
dt
dvt uua
2
)( +=
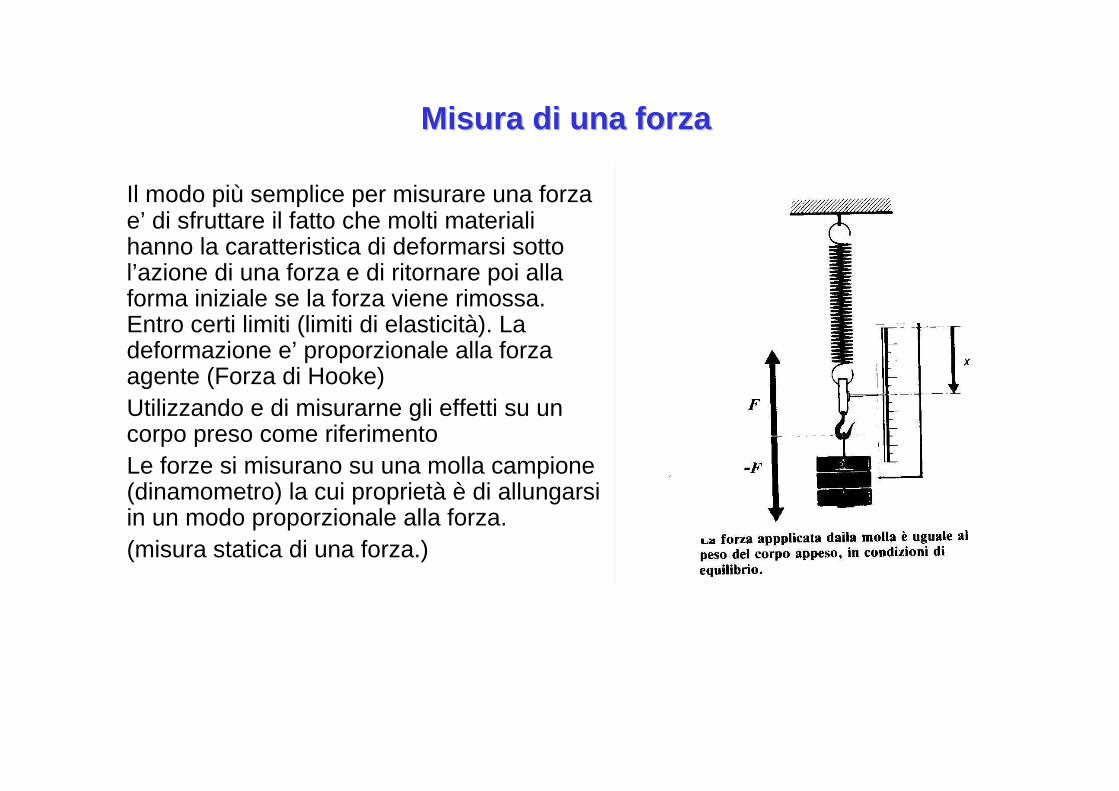
Misura di una forzaMisura di una forza
Il modo più semplice per misurare una forza e’ di sfruttare il fatto che molti materiali hanno la caratteristica di deformarsi sotto l’azione di una forza e di ritornare poi alla forma iniziale se la forza viene rimossa. Entro certi limiti (limiti di elasticità). La deformazione e’ proporzionale alla forza agente (Forza di Hooke)Utilizzando e di misurarne gli effetti su un corpo preso come riferimentoLe forze si misurano su una molla campione (dinamometro) la cui proprietà è di allungarsi in un modo proporzionale alla forza.(misura statica di una forza.)

Peso di un corpo : e’ la forza (vettore) gravitazionale applicata ad un corpo.
Dalla II legge:
La forza peso P e’ un vettore avente:
Modulo mg = m 9.8 kg m s-2
Direzione : ( verticale orientata verso il centro della terra)
Verso ( diretto verso il basso)
La forza peso si misura con il dinamometro , utilizzando le proprietà elastiche della materia e misurando le deformazioni che la questa produce su un corpo (e.g. la molla del dinamometro)
Massa di un corpo quantità scalare pari al rapporto fra il modulo della forza applicata ad un corpo e l’accelerazione che ne risulta
Una massa si misura con una bilancia, facendo un confronto con una massa campione
La forza applicata ad una massa di 1 kg e’ 9.8 N
Forze gravitazionali : Peso e massaForze gravitazionali : Peso e massa
gP m=
gP m=
Forza peso applicata al corpo
Massa del corpo

Commenti alla Commenti alla III a leggeAd ogni forza esercitata su un corpo corrisponde un a forza opposta (ovvero eguale in modulo e direzione ma con verso opposto Reazione)Reazioni vincolari Se un corpo, sottoposto ad una o più forze note R e’ in equilibrio, l’ azione di queste forze provoca una reazione Ndell’ ambiente circostante che e’ eguale e contraria tale che:
R + N = 0 (3.1) La forza N e’ detta reazione vincolare e dipende dalle forze agenti. Pertanto può essere calcolata soltanto se le forze agenti sono note
Esempio: Peso apparente di un sistema in moto accel eratoEsempio: Peso apparente di un sistema in moto accel eratoUn corpo di massa m, in equilibrio statico su un pavimento esercita una forza sul pavimento e risente di una reazione N che in modulo vale mg. È questa reazione applicata per esempio al nostro corpo che ci da la sensazione di peso. Se il corpo è posato su una piattaforma in movimento che si muove verticalmente con accelerazione a, finché il corpo resta sulla piattaforma la sua accelerazione è a e l'equazione (3.1) si scrive
N + P = ma => N + mg = ma ,
R
N

Peso apparente di un sistema in moto acceleratoPeso apparente di un sistema in moto accelerato
z
N
La forza di reazione e’ pertanto:
N = m (a - g)
Se si assume come riferimento un asse z verticale orientato verso l'alto, per cui : g =-guz.
1) Se a è discorde g, piattaforma che accelera verso l'alto (o perché sale accelerando o perché scende frenando) :
N = m[auz - (-guz)] = m(a + g) uz => N > mg ; si ha una sensazione di aumento di peso,
2) Se a è concorde a g, ma minore in modulo: la sensazione è di diminuzione di peso,
N = m[-auz - (-guz)] = m(g - a) uz => N < mg ; la bilancia da una lettura minore di quando la piattaforma è ferma
3) Se a = g => N = 0 : non c'è reazione e non c'è sensazione di peso (corpo e piattaforma in caduta libera).
4) Se a concorde a g, ma maggiore in modulo: si ha il distacco del corpo dalla piattaforma;
la soluzione darebbe N discorde all'asse z,(diretto verso il basso) la reazione dovrebbe attirare il corpo verso la piattaforma, il che è privo di senso.

Forze elastiche. Legge di Forze elastiche. Legge di HookeHooke sulle deformazioni sulle deformazioni
• Un corpo solido a cui sia applicata una forza subisce una deformazione (elastica) proporzionale alla intensità della forza attraverso una costante che dipende solo dal materiale di cui il corpo e’ costituito (costante elastica della molla).
• F = -k x ux
• Il corpo ritorna alla sua forma originale quando la forza e’ rimossa e può essere utilizzato per applicare una forza su un altro corpo (forza elastica).
• Una molla e’ il sistema tipico per applicare forze elastiche unidirezionali.
F (N)
Laboratorio di Fisica di SN Risultati di misure statiche di
allungamento di molle
Lunghezza a riposo
Lunghezza in estensione
Lunghezza in compressione

Fenomeni di deformazione di corpi solidiFenomeni di deformazione di corpi solidi
)tan(θεσ =
∆==
lS
FlE
S
F=σ
l
l∆=ε
El
l
r
r σννενε −=−=∆−=∆=
Nello studio del comportamento di corpi solidi sottoposti a deformazioni elastiche sono definiti i parametri:
In una sbarra soggetta a una forza di trazione F, per piccole deformazioni “l’allungamento lineare unitario e’ proporzionale al carico specifico ” ossia :
Il che e’ in accordo con la legge di Hook. (k = SE/l). E e’ detto coefficiente di Young [F]/[L2]
• Allungamento lineare unitario (percentuale di allungamento):
S
F
Per effetto della trazione, le dimensioni trasversali del corpo variano:per esempio la sezione di una sbarra cilindrica varia: Vale la legge di Poisson :
ν e’ detto coefficiente di Poisson (senza dimensioni). Si verifica sperimentalmente che 0 < ν < 0.5, a seconda del materiale
• Carico specifico (applicato ortogonalmente alla superficie S di un corpo):

ossia:
Se si suppone ∆V > 0
Se confrontiamo l’ equazione precedente con quella di Poisson:
risulta ν < 0.5 (come si verifica sperimentalmente) come condizione necessaria perché ∆V > 0. Pertanto il volume rimane costante se ν = 0.5 ed aumenta se ν < 0.5, quando viene rimosso il carico.
Fenomeni di deformazione di corpi solidiFenomeni di deformazione di corpi solidi
rrlllrllrrrrllrrVV ∆+∆+=∆+∆+∆+=∆+∆+=∆+ ππππ 2)())(2()()( 2222
rrllrV ∆+∆=∆ ππ 22
r
r
l
l ∆−>+∆ 2
l
l
r
r ∆−=∆= νε
Si può verificare che per piccole deformazioni il volume del solido V=πr2l non diminuisce mai . Infatti il volume deformato e’, a meno di quantità dell’ ordine di ∆2 :
II comportamento elastico del materiale si manifesta entro certi valori del carico..
Al di sopra di un valore critico del carico, che dipende dal tipo di materiale, si determina una deformazione permanente, che prende il nome di deformazione plastica, e che non è reversibile

Il carico specifico sotto cui avviene l'inizio della deformazione plastica è definito come carico specifico di snervamento σs. Per valori superiori a σs si osserva un notevole aumento della deformazione, anche per aumenti limitati del carico, come si vede in figura 7.45: nel tratto lineare si ha deformazione elastica (reversibile), per σ > σs si ha deformazione plastica (non reversibile)
Per l'acciaio σs. = 30, per il rame è compreso tra 7 e 30, per il piombo è dell'ordine di 1, in unità I07 N/m2.
Aumentando ulteriormente il carico il materiale arriva alla rottura. Il carico specifico a cui avviene la rottura è chiamato carico specifico ultimo o carico unitario di rottura σr.
Il carico di rottura a trazione è per l'acciaio compreso tra 50 e200xIO7 N/m2 a seconda della composizione, 10 per l'alluminio, ~1 per il piombo. Il carico di rottura in compressione può differire da quello in trazione: nel vetro esso è pari a 60-120, per il piombo a 5.
Un materiale ad alta resistenza meccanica, cioè in grado di sopportare elevati carichi specifici è chiamato tenace . Un materiale nel quale la rottura ha luogo senza una apprezzabile deformazione plastica è chiamato fragile. Un materiale duttile se la deformazione plastica prima della rottura può essere espressa dall'allungamento specifico (o riduzione specifica) intervenuto sotto carico.
Fenomeni di deformazione di corpi solidiFenomeni di deformazione di corpi solidi
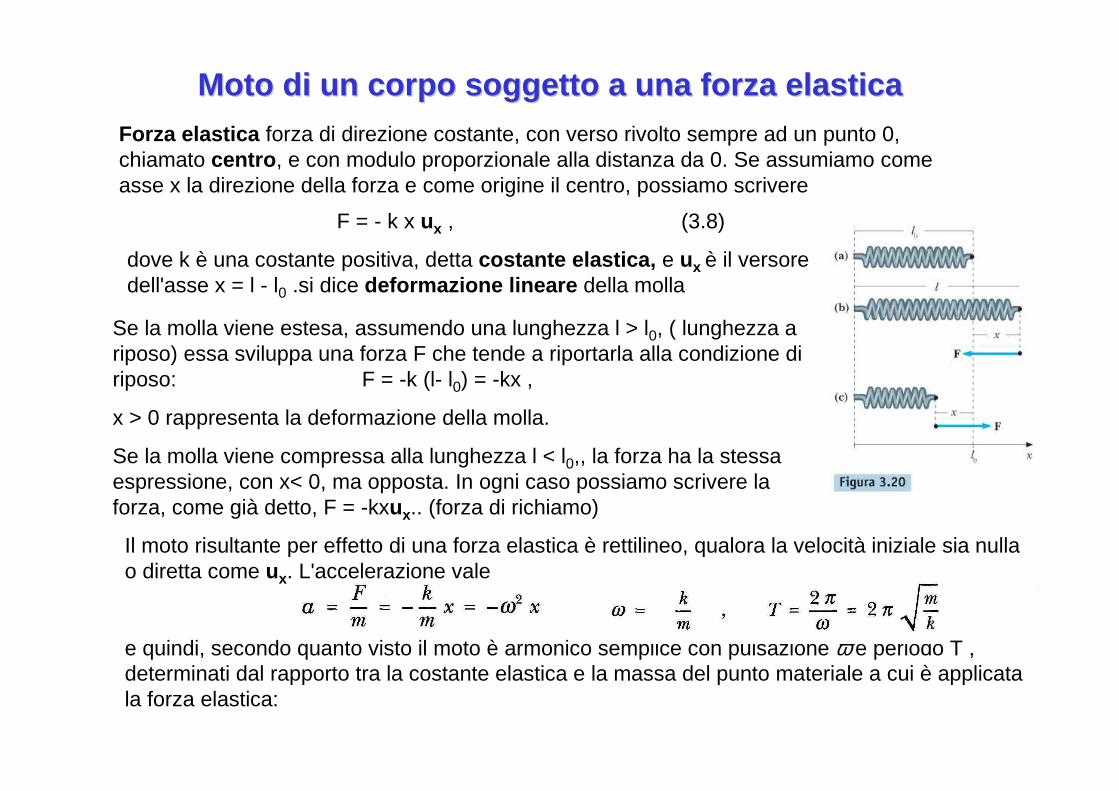
Moto di un corpo soggetto a una forza elasticaMoto di un corpo soggetto a una forza elasticaForza elastica forza di direzione costante, con verso rivolto sempre ad un punto 0, chiamato centro , e con modulo proporzionale alla distanza da 0. Se assumiamo come asse x la direzione della forza e come origine il centro, possiamo scrivere
Se la molla viene estesa, assumendo una lunghezza l > l0, ( lunghezza a riposo) essa sviluppa una forza F che tende a riportarla alla condizione di riposo: F = -k (l- l0) = -kx ,
x > 0 rappresenta la deformazione della molla.
Se la molla viene compressa alla lunghezza l < l0,, la forza ha la stessa espressione, con x< 0, ma opposta. In ogni caso possiamo scrivere la forza, come già detto, F = -kxux.. (forza di richiamo)
F = - k x ux , (3.8)
dove k è una costante positiva, detta costante elastica, e ux è il versore dell'asse x = l - l0 .si dice deformazione lineare della molla
Il moto risultante per effetto di una forza elastica è rettilineo, qualora la velocità iniziale sia nulla o diretta come ux. L'accelerazione vale
e quindi, secondo quanto visto il moto è armonico semplice con pulsazione ω e periodo T , determinati dal rapporto tra la costante elastica e la massa del punto materiale a cui è applicata la forza elastica:

Moto di un corpo soggetto a forza elasticaMoto di un corpo soggetto a forza elasticaPertanto se all’ estremo P di una molla bloccata nell'estremo Q,(figura 3.21), e deformata di una lunghezza x0 e’ fissato un punto materiale di massa m (massa della molla <<m). e all‘ istante t = 0 il punto viene lasciato libero con velocità nulla (condizioni iniziali x= x0 e v = 0 per t= 0), esso si muove di moto armonico per effetto della forza elastica
è x = A sin(ωt + φ). I valori delle costanti A e 0 si calcolano dalle condizioni iniziali
x0
x0 = A sen φ , 0 = ω A cos φ ,
dato che v = ω A cos(ω t + φ). Per 0 compreso tra 0 e 2π sono possibili le due soluzioni A = x0, φ = π/2 e A = -x0, , φ = 3π/2. In ogni caso si hanno per la legge oraria e per la velocità le espressioni:
x = x0 cos ωt , v = -ωx0 sen ωt .
Se le condizioni iniziali sono diverse si ottiene sempre un moto armonico con la medesima ω, però il valore dell'ampiezza è in generale diverso da x0.
Per esempio, con x = x0 e v = v0 per t = 0, si ottiene:
A è maggiore di x0 a causa della velocità iniziale diversa da zero. Se poniamo v0 = 0 si ri-ottiene il risultato precedente.

Se lo stesso sistema molla + massa è disposto verticalmente si realizza il dispositivo del pendolo a molla. Le forze in gioco sono lievemente diverse dal caso precedente perché ora al corpo oltre alla forza elastica è applicata anche la forza di gravità.
In condizioni statiche il corpo e’ in equilibrio quando la somma delle forze si annulla ossia quando
mg - kd = 0
Se il peso viene spostato vero l’ alto in posizione y la forza agente e’:
Fy= k (d-y) - mg
e l’ equazione della dinamica e’:
k (d-y) - mg = ma
Anche la legge del moto di un corpo appeso alla molla e’ del tipo d2y/dy2 = -(k/ m) y
e pertanto e’ un moto armonico con frequenza angolare
y = A cos( ωωωωt + φφφφ)
La misura del periodo del pendolo permette permette una misura indiretta ma precisa della costante di elasticità della molla k
Questa misura sarà effettuata in Laboratorio
Pendolo a molla Pendolo a molla
ωk
m
Posizione di equilibrio
d
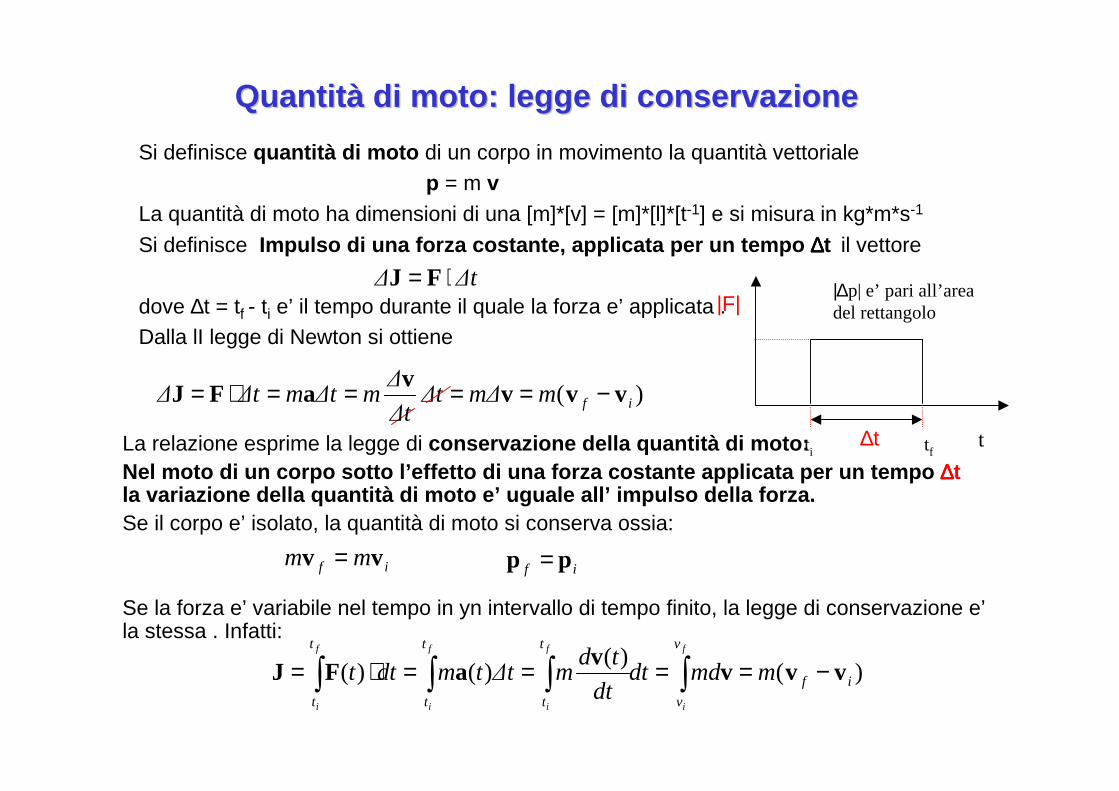
Quantità di moto: legge di conservazioneQuantità di moto: legge di conservazione
Si definisce quantità di moto di un corpo in movimento la quantità vettorialep = m v
La quantità di moto ha dimensioni di una [m]*[v] = [m]*[l]*[t-1] e si misura in kg*m*s-1
Si definisce Impulso di una forza costante, applicata per un tem po ∆∆∆∆t il vettore
dove ∆t = tf - ti e’ il tempo durante il quale la forza e’ applicata .Dalla lI legge di Newton si ottiene
La relazione esprime la legge di conservazione della quantità di moto: Nel moto di un corpo sotto l’effetto di una forza c ostante applicata per un tempo ∆∆∆∆tla variazione della quantità di moto e’ uguale all’ impulso della forza.Se il corpo e’ isolato, la quantità di moto si conserva ossia:
Se la forza e’ variabile nel tempo in yn intervallo di tempo finito, la legge di conservazione e’ la stessa . Infatti:
t
|F|
∆t
|∆p| e’ pari all’area del rettangolo
ti tf
∆t∆ ⋅= FJ
)( ifmm∆∆t∆t
∆m∆tm∆t∆ vvv
vaFJ −====⋅=
if pp =if mm vv =
)()(
)()( if
v
v
t
t
t
t
t
t
mmddtdt
tdm∆ttmdtt
f
i
f
i
f
i
f
i
vvvv
aFJ −====⋅= ∫∫∫∫