mecanica de rocas-cap3.pdf
DESCRIPTION
mecanica de rocas cap3TRANSCRIPT
MECANICA DE ROCASCAPITULO TERCERO: ESFUERZOS DE
CAMPO Y ESFUERZOS INDUCIDOS1. Esfuerzos primitivos ó de campo 2. Esfuerzos Desarrollados
a. E. Gravitacionales a. E. Inducidosb. E. Tectónicos b. E. Resultantesc. E. Estructuralesd. E. Residualese. E. Térmicos

5.015003.0100
ZK
Z
1
K
ZEhK 1001.0*725.0
Coeficiente de presión del terreno:• Terzaghi y Richart (1952)• Brown y Hoek (1978)• Sheorey (1994)
Bajo superficies horizontales, la relación del esfuerzo vertical σV= γ * Z es adecuada.
Sin embargo, hay limitaciones debido a la Variación del esfuerzo vertical sobre planos horizontales cortando estratos plegados de distinta rigidez, Influencia de una estructura geológica heterogénea, así como la Erosión que tiende a aumentar el valor de K, con lo cual el esfuerzo horizontal es mayor que la vertical a profundidades bajas
ESFUERZOS GRAVITACIONALES


B: Considerando el campo de esfuerzos principalesC. UNIAXIAL : σ1≠0, σ2 =σ3=0 C. BIAXIAL : σ1≠0, σ2 ≠0 , σ3=0C. TRIAXIAL : σ1≠0, σ2 = σ3 ≠ 0
A: Considerando el Factor de Presión del Terreno (K)C. UNIDIRECCIONAL : K=0, σH = 0, σV ≠ 0C. CON CONFINAMIENTO LATERAL: 0<K< 1, σH ≠ 0,
σV ≠ 0, σV > σHC. HIDROSTATICO : K=1, σH = σV ≠ 0, C. SUPERLITOSTÁTICO: K >1, σH ≠ 0, σV ≠ 0, σH > σV
000000001
123
VHV
0
00
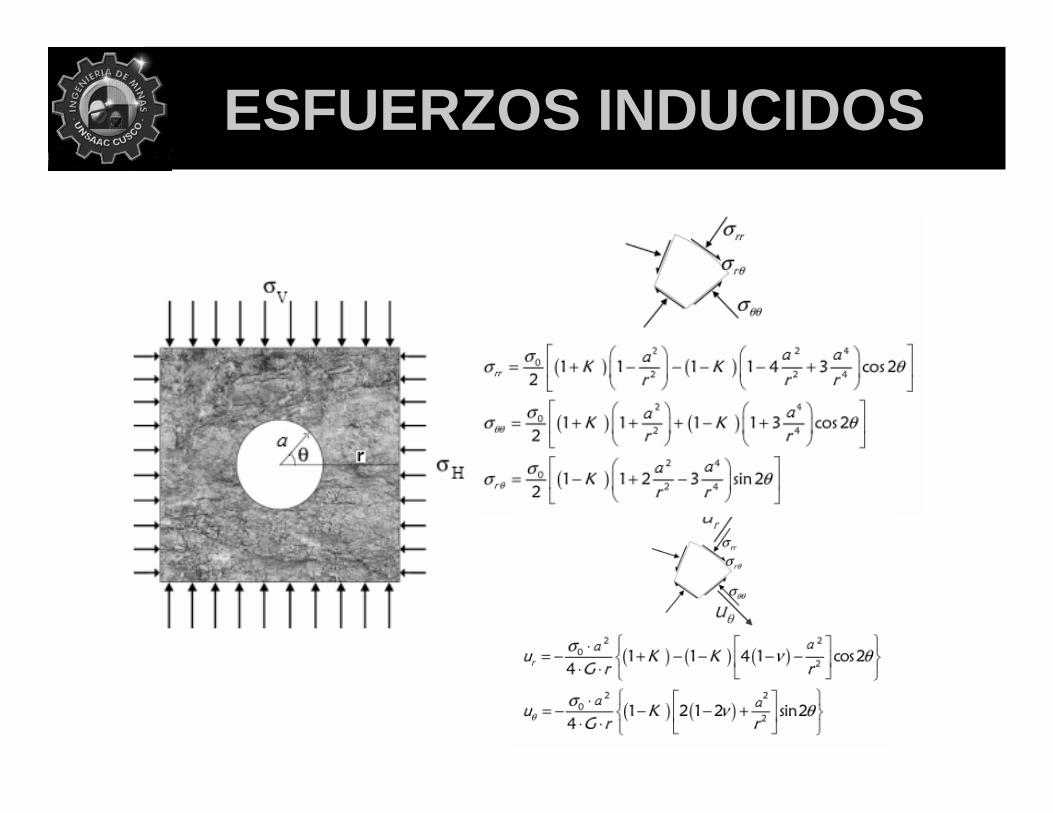
ESFUERZOS INDUCIDOS


ESFUERZOS IN SITU

METODOS DIRECTOS DE ANALISIS DE ESFUERZOS IN SITU
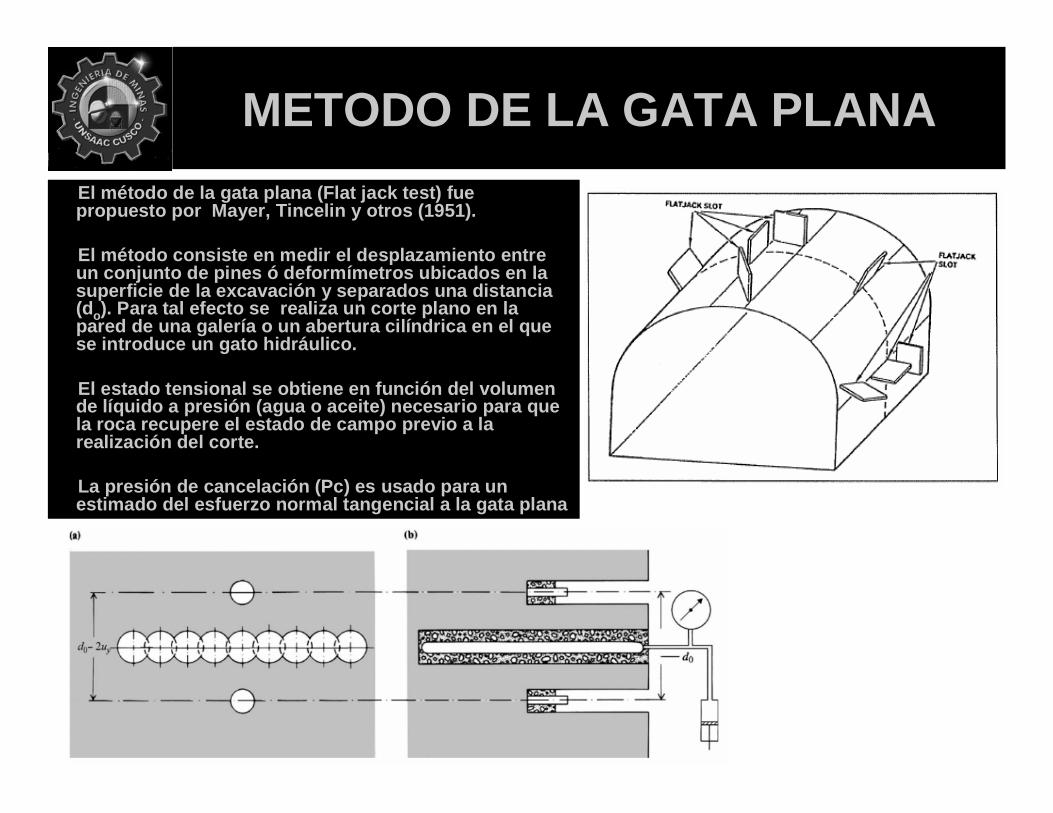
METODO DE LA GATA PLANAEl método de la gata plana (Flat jack test) fue propuesto por Mayer, Tincelin y otros (1951).
El método consiste en medir el desplazamiento entre un conjunto de pines ó deformímetros ubicados en la superficie de la excavación y separados una distancia (do). Para tal efecto se realiza un corte plano en la pared de una galería o un abertura cilíndrica en el que se introduce un gato hidráulico.
El estado tensional se obtiene en función del volumen de líquido a presión (agua o aceite) necesario para que la roca recupere el estado de campo previo a la realización del corte.
La presión de cancelación (Pc) es usado para un estimado del esfuerzo normal tangencial a la gata plana


Método Flat Jack
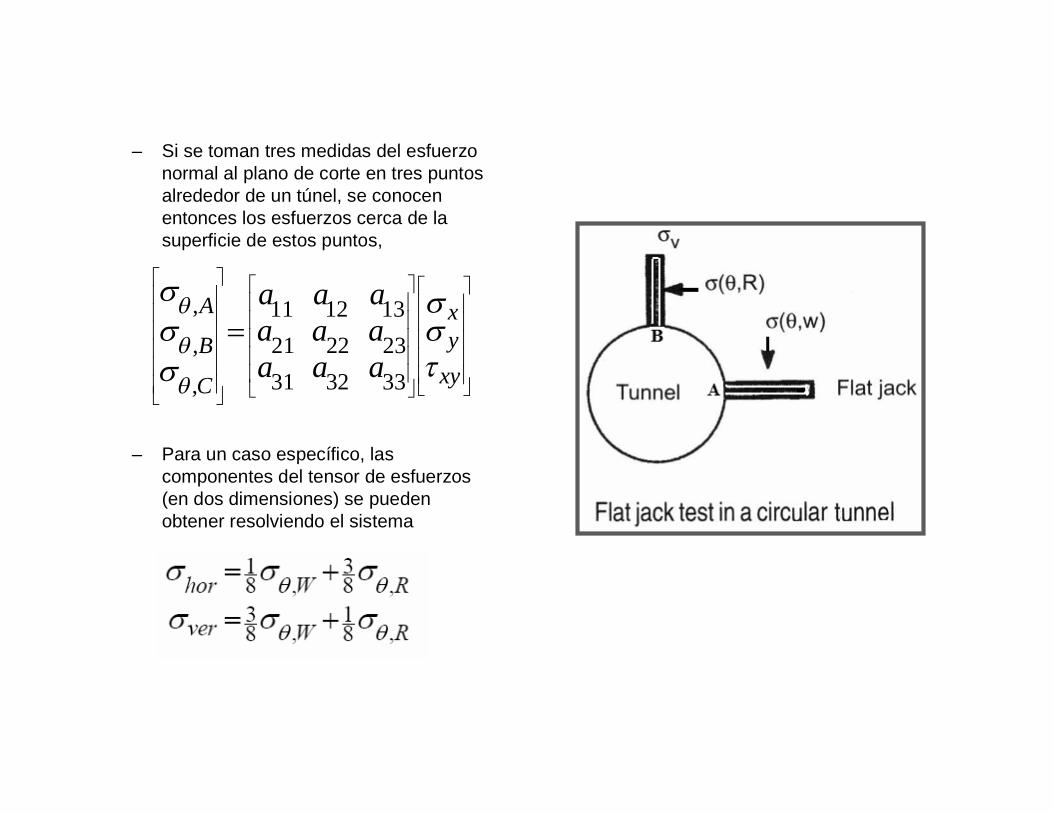
– Si se toman tres medidas del esfuerzo normal al plano de corte en tres puntos alrededor de un túnel, se conocen entonces los esfuerzos cerca de la superficie de estos puntos,
– Para un caso específico, las componentes del tensor de esfuerzos (en dos dimensiones) se pueden obtener resolviendo el sistema
, 11 12 13, 21 22 23
31 32 33,
A xyB
xyC
a a aa a aa a a

METODO DEL FRACTURA-MIENTO HIDRAULICO
El estado general de tensiones en un punto de la corteza de la tierra es de compresión y puede ser representado por tres esfuerzos principales, una vertical, σV, y dos horizontales, σh y σHEl taladro de ensayo será vertical y paralelo a la dirección de la tensión principal vertical σVσV puede ser calculada en función de la profundidadEl comportamiento de la roca es elástico lineal, y se supone que es isótropo, homogéneo y continuo.
Entre los modelos de fracturamientohidráulico tenemos:
1. Modelo Elástico2. Modelo Poro-elástico3. Modelo de Fracturamiento
Presurizado Mecánico4. Modelo de Fracturas Pre-existentes
(HTPF)
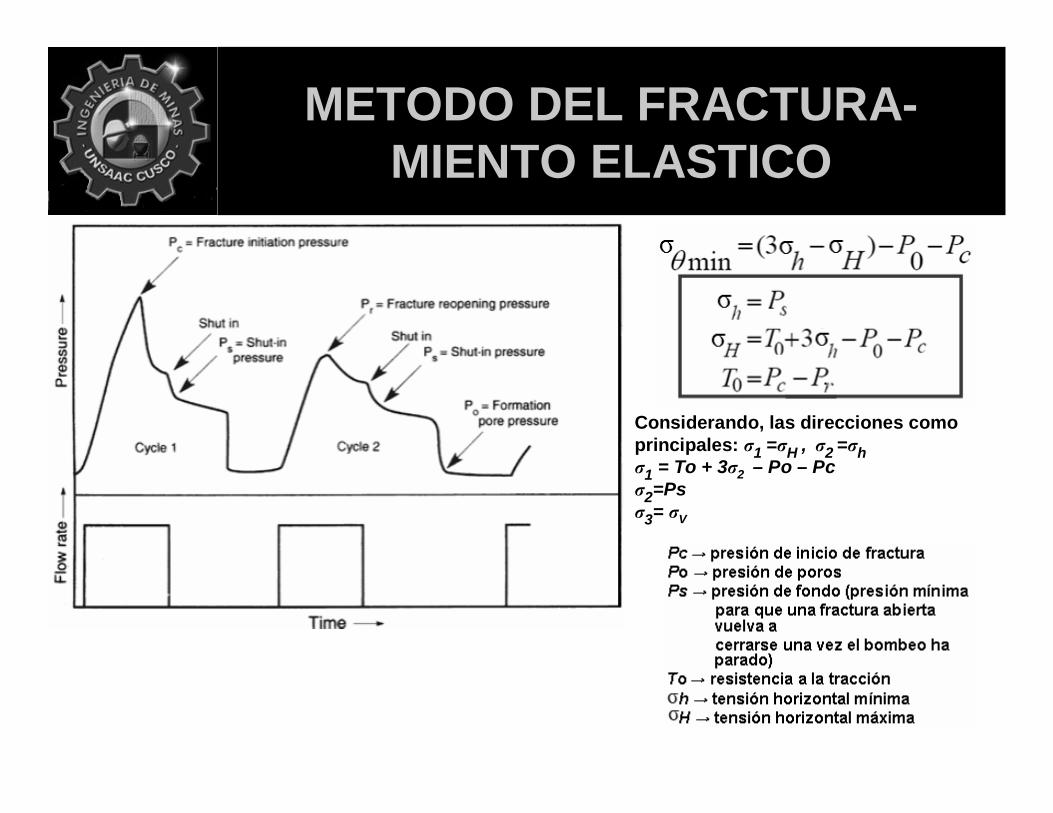
METODO DEL FRACTURA-MIENTO ELASTICO
Considerando, las direcciones como principales: σ1 =σH , σ2 =σhσ1 = To + 3σ2 – Po – Pcσ2=Psσ3= σV
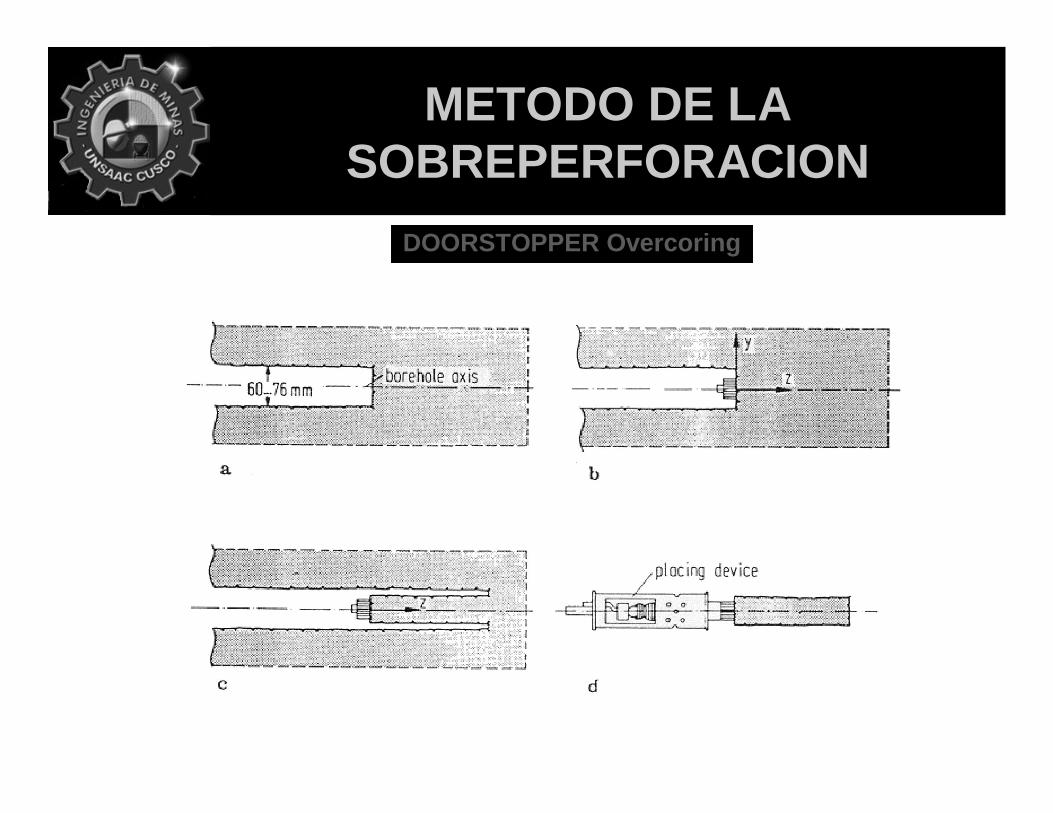
METODO DE LA SOBREPERFORACION
DOORSTOPPER Overcoring

• Perforación de un agujero cilíndrico de unos 60 a 76 mm, hasta la posición del estudio.
• Se coloca la célula en el fondo del agujero, pegada• a la pared.• Ejecución de la sobreperforación• Las deformaciones son recogidas por las galgas
del instrumento, y medidas al mismo tiempo• Se extrae el instrumento junto con la porción de
roca que quedaba dentro de la corona cilíndrica, para determinar en el laboratorio las constantes elásticas
• Son necesarios al menos 3 ensayos en 3 agujerosno paralelos para determinar las 6 componentes del tensor de tensiones
• El fondo del agujero debe ser plano y estar limpio y seco; se requiere buena cementación
• Se miden las deformaciones en la roseta y se calculanlas magnitudes de las deformaciones, esfuerzos y direcciones principales:
METODO DOORSTOPPER

METODO DOORSTOPPER

22
222
22
22
22
SenCos
SenSenCos
CosSenSenCos
xyyxyx
xyyx
xyyx
xy
y
x
C
B
A
0102
12
12
1001
C
B
A
xy
y
x
121100001
• Roseta Rectangular: θA=0o, θB=45o, θC=90o
• Roseta Equiangular: θA=0o, θB=60o, θC=120o
xy
y
x
BBB
BBB
AAA
C
B
A
SenSenCos
SenSenCos
SenSenCos
221
221
221
22
22
22

USBM deformation gage• Célula "triaxial" que proporciona tensiones sobre un plano• Cada medición proporciona 3 componentes del tensor de
tensiones - como mínimo dos mediciones en direcciones perpendiculares (suelen hacerse tres)
• 6 "botones" repartidos en el perímetro que ponen en contacto las paredes del agujero y las galgas situadas en el interior del aparato, que miden los movimientos
• Al ejecutar el overcoring, las tensiones se liberan y se producen movimientos, recogidos por los botones y transmitidos a las galgas
• La parte del material cortado se extrae para determinar, en el laboratorio, las constantes elásticas
• El instrumento es reutilizable
METODO USBM

1 2 3 4
2 21
22 2
32
4
( )
1(1 2cos2 )
1(1 2cos2 )
1(4sin2 )
zx y xzd f f f f
f d dE Ef d Ef d dE Ef d E
• Se mide el cambio de diámetro (d) al descargar:
• Se plantea un sistema de tres ecuaciones que permite calcular las tensiones:
11 13 141 2
1 2 21 23 24
1 2 31 33 34
( ) ( )( 60) ( )( 120) ( )
yxzy
xzy
f f fd fd f f f fd f f f f
METODO USBM

CSIRO Triaxial Hollow Inclusion Cell• La célula va equipada con tres rosetas, cada una de
las cuales lleva tres o cuatro extensómetros que se adhieren a la pared del taladro
• Sólo aplicable a rocas de comportamiento aproximadamente elástico y homogéneo. Debe realizarse en una zona no fracturada
METODO CSIRO


0 0 0 2 0 0 02 1 2 4 2 2
0 0 02 2
0 02 2 3
( ) ( ) 2 1 cos2 2 sin 2 ( )
4(1 ) sin cos ( )
x y z x y xy
z z x y
xz yzz
E K e K e K e
E
E K e
21
1 1 1 2 1 1 22
2 51 42 2 1 3 2 4
21
3 6 2
21 2 1 1
4 1 1 22 2
( ) (1 ) 1 2
( ) (1 )
( ) 1
( )( ) 1 2
RK e de
d dK e d e de e
RK e de
RK e de
Roca (E2, 2)
Epoxi (E1, 1)
R2
R1e
• Cálculo de los esfuerzos
Siendo:
METODO CSIRO