matthew moelter - cal polymmoelter/nonlinear/gordonmoelterppt.pdf• “lecture” • 3 x 1 hr •...
TRANSCRIPT

Lab-based course innonlinear dynamics
Matthew MoelterAssoc. Professor, Department of Physics
California Polytechnic State Univ
San Luis Obispo, CA

June 16, 2004 Phys Educ&Rsch: Classical Mech/Nonlinear Dynamics 2
Colleagues/Support
• Physics: N. Sungar, J. Sharpe, N. Fleishon
• Math: K. Morrison, J. McDill
• Chemistry: R. Schoonover
• NSF DUE 9594909
• Am. J. Phys. 69, 591-597, May 2001
June 16, 2004 Phys Educ&Rsch: Classical Mech/Nonlinear Dynamics 3
Today’s Plan
• Introduction
• Objectives
• Course development
• Laboratory: experiments, projects
• How it went
• Future

June 16, 2004 Phys Educ&Rsch: Classical Mech/Nonlinear Dynamics 4
Cal Poly - “Learn by doing”
• Calif. State Univ. system (24 campuses)– Agriculture, Architecture, Business, Engineering,
Liberal Arts, Science and Math
• 17,000 students
• Highly selective
• ≈100 years old
• California “central coast” (SF-SLO-LA)

June 16, 2004 Phys Educ&Rsch: Classical Mech/Nonlinear Dynamics 5
SF
LA
SLO
nonlinear
June 16, 2004 Phys Educ&Rsch: Classical Mech/Nonlinear Dynamics 6
Objectives
• Interdisciplinary, upper-division
• Intuition: “typical” nonlinear behavior(s)
• Geometrical approach– Phase space, fixed points, bifurcations,
limit cycles, attractors
• Different physical systems, similar math

June 16, 2004 Phys Educ&Rsch: Classical Mech/Nonlinear Dynamics 7
Objectives (cont)
• "in-time" examples– simulation and experimentation– math symbols↔knobs
• Data display/analysis techniques– Power spectra, Poincare sect, return maps
June 16, 2004 Phys Educ&Rsch: Classical Mech/Nonlinear Dynamics 8
Developing course
• Studio classroom (in place)
• NSF grant– Faculty summer $alary
• Content/Laboratory experiences
– release time
– equipment
• Strogatz visit (text author)

June 16, 2004 Phys Educ&Rsch: Classical Mech/Nonlinear Dynamics 9
Course: Physics 417
• Interdisciplinary– crosslisted math/phys
– approved elective (science/engineering)
• Prerequisites– 1 yr calculus (analytical)
– Junior-level course in major or diff eqn (*)
• Quarter (10 weeks)

June 16, 2004 Phys Educ&Rsch: Classical Mech/Nonlinear Dynamics 10
Course (cont.)
• Student population– Physics: 16
– Engineering (various): 12
– Mathematics: 2
– Archit., Undec, Phys Sci: 4
• 3 times: 1997, 99, 2002
June 16, 2004 Phys Educ&Rsch: Classical Mech/Nonlinear Dynamics 11
Text
• Strogatz, Nonlinear Dynamicsand Chaos– Non-physics students
– Qualitative/numerical solutions
– Phase space
– Bifurcations
– Chaos late
June 16, 2004 Phys Educ&Rsch: Classical Mech/Nonlinear Dynamics 12
Nonlinear in the studio
• “Lecture”• 3 x 1 hr
• Activities: groups, problem-solving, simulations
• Lab• 1 x 3 hr
• 8-12 students (= 4x2)
• “Real time” experiments(symbol knob)

June 16, 2004 Phys Educ&Rsch: Classical Mech/Nonlinear Dynamics 13
Physics Studio
20 computers, carpet, A/C
A/V: broadcast instructor/student screen

June 16, 2004 Phys Educ&Rsch: Classical Mech/Nonlinear Dynamics 14
Real time data
• Computers– Macintosh IIci's,
PPC, G4
• Interface– ULI or LabPro
• Probes• Motion
• Rotation
• Temperature
• Sound
• Pressure
• Voltage/Current
• pH
probe interface computer
experiment
June 16, 2004 Phys Educ&Rsch: Classical Mech/Nonlinear Dynamics 15
Software
• Software– Acquisition
• LoggerPro, MacMotion, ULITimer
– Analysis: Matlab, Excel
– Simulation• Differential Systems
• MacMath
June 16, 2004 Phys Educ&Rsch: Classical Mech/Nonlinear Dynamics 16
Overall schedule (weeks)• 1D (non)linear (2)
– phase space, fixed pts, terminology
• Bifurcation (1)– parameter space, types of bifurcations
• 2D linear (1)– Eigenvalue/vector
• MultiD nonlinear (3)– Linearize at fixed pt, topology, limit cycles

June 16, 2004 Phys Educ&Rsch: Classical Mech/Nonlinear Dynamics 17
Schedule (cont)
• 1D maps (1)– discrete time steps, return maps
• Bifurcation in 2D (1)– Hopf bifurcation, Poincare maps
• Lorenz (1)– Strange attractors, chaos

June 16, 2004 Phys Educ&Rsch: Classical Mech/Nonlinear Dynamics 18
Experiments (weeks)
• Num. Methods (0.5)
• 1D systems (1.5)
• Bifurcation (0.5)
• 2D systems (1.5)
• MultiD systems (0.5)
• Written weeklyreports
• Stability (1)
• Nonlinear (1)
• Discrete systems (1)
• Project (3)
• symbol↔knob

June 16, 2004 Phys Educ&Rsch: Classical Mech/Nonlinear Dynamics 19
E: Numerical methods
• Numerical integration by hand
• Differential Systems– slope fields
– trajectories
• Matlab– Plotting/analysis
– ODE solver
June 16, 2004 Phys Educ&Rsch: Classical Mech/Nonlinear Dynamics 20
E: 1D Systems
• dx/dt = f(x)
• Dissimilar systems, same math
• Fixed points from dx/dt vs x
• Student data

June 16, 2004 Phys Educ&Rsch: Classical Mech/Nonlinear Dynamics 21
E: 1D Systems-linear
• Newton’s lawof cooling
• RC circuit
˙ q
q
June 16, 2004 Phys Educ&Rsch: Classical Mech/Nonlinear Dynamics 22
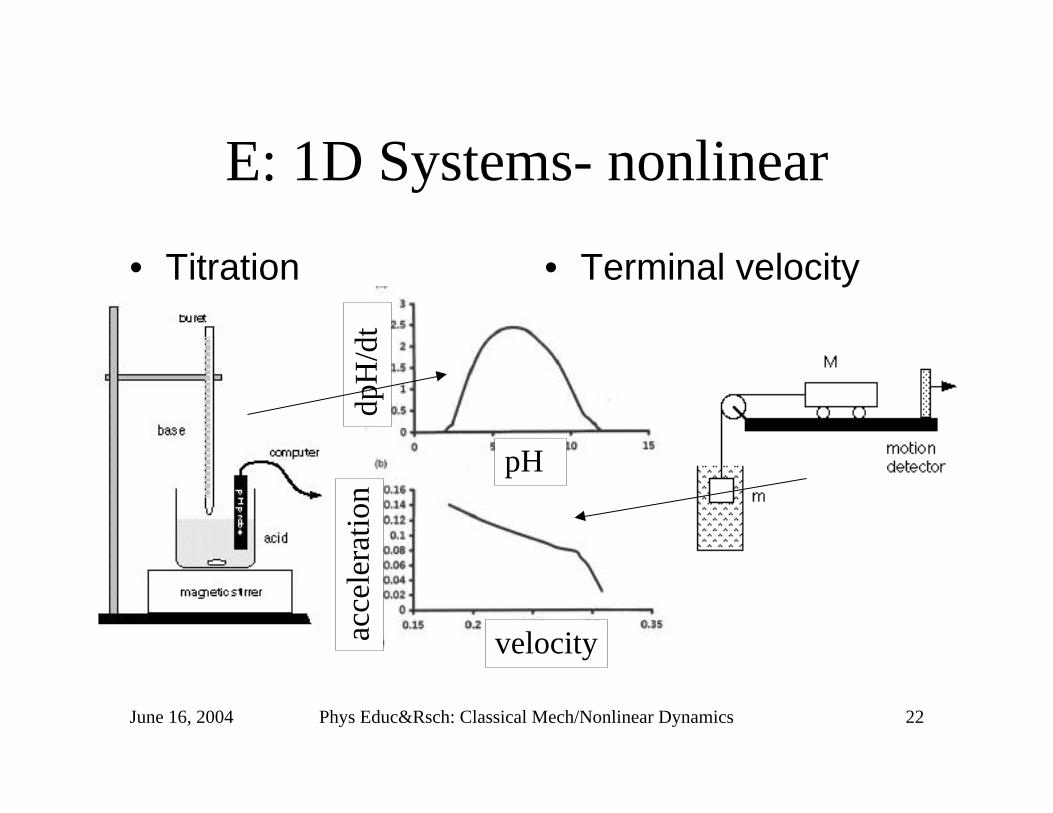
E: 1D Systems- nonlinear
• Titration • Terminal velocity
pH
dpH
/dt
velocityacce
lera
tion
June 16, 2004 Phys Educ&Rsch: Classical Mech/Nonlinear Dynamics 23
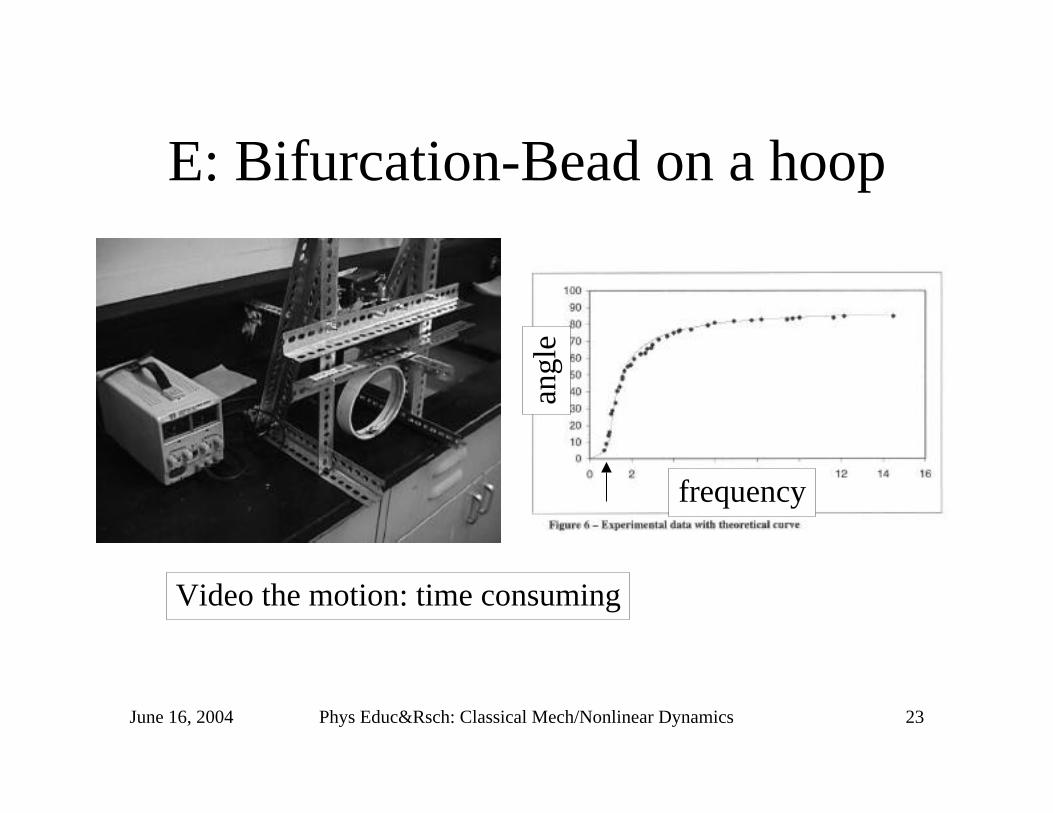
E: Bifurcation-Bead on a hoop
Video the motion: time consuming
frequency
angl
e
June 16, 2004 Phys Educ&Rsch: Classical Mech/Nonlinear Dynamics 24
E: 2D systems
• dx/dt = f(x,y); dy/dt=g(x,y)
• Dissimilar systems, same math
• Phase plane/relation to motion
• Study of oscillations/orbits/spirals
June 16, 2004 Phys Educ&Rsch: Classical Mech/Nonlinear Dynamics 25
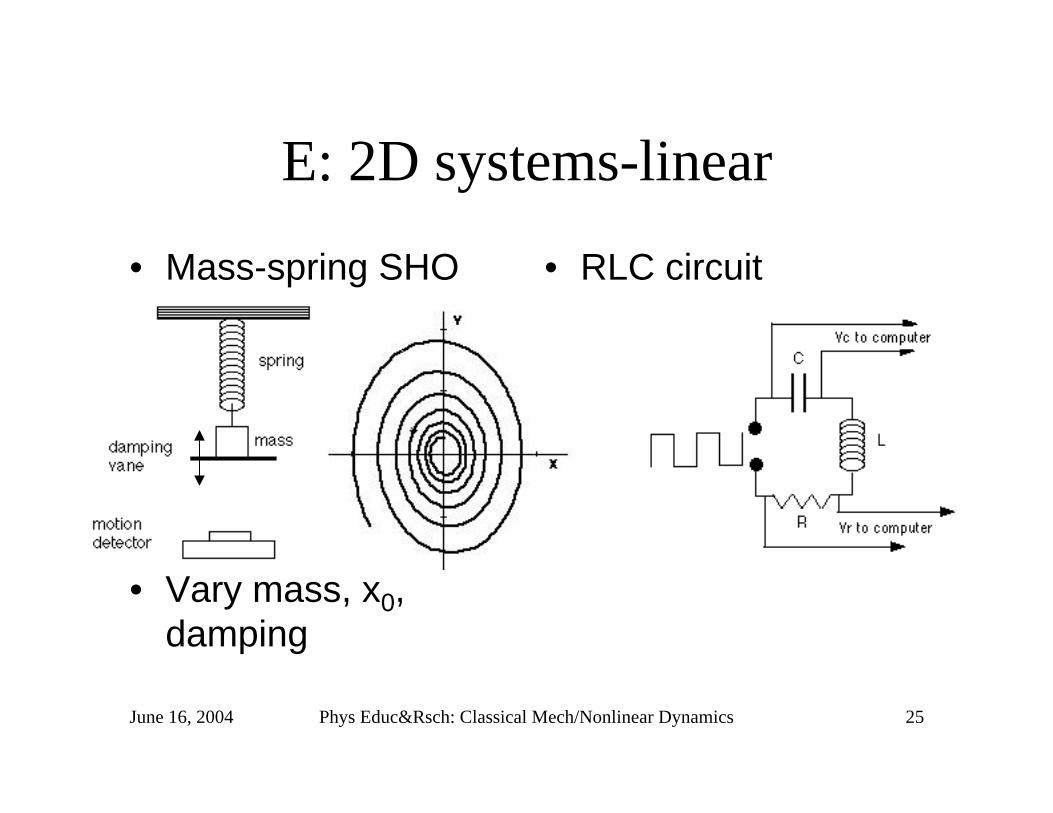
E: 2D systems-linear
• Mass-spring SHO
• Vary mass, x0,damping
• RLC circuit

June 16, 2004 Phys Educ&Rsch: Classical Mech/Nonlinear Dynamics 26
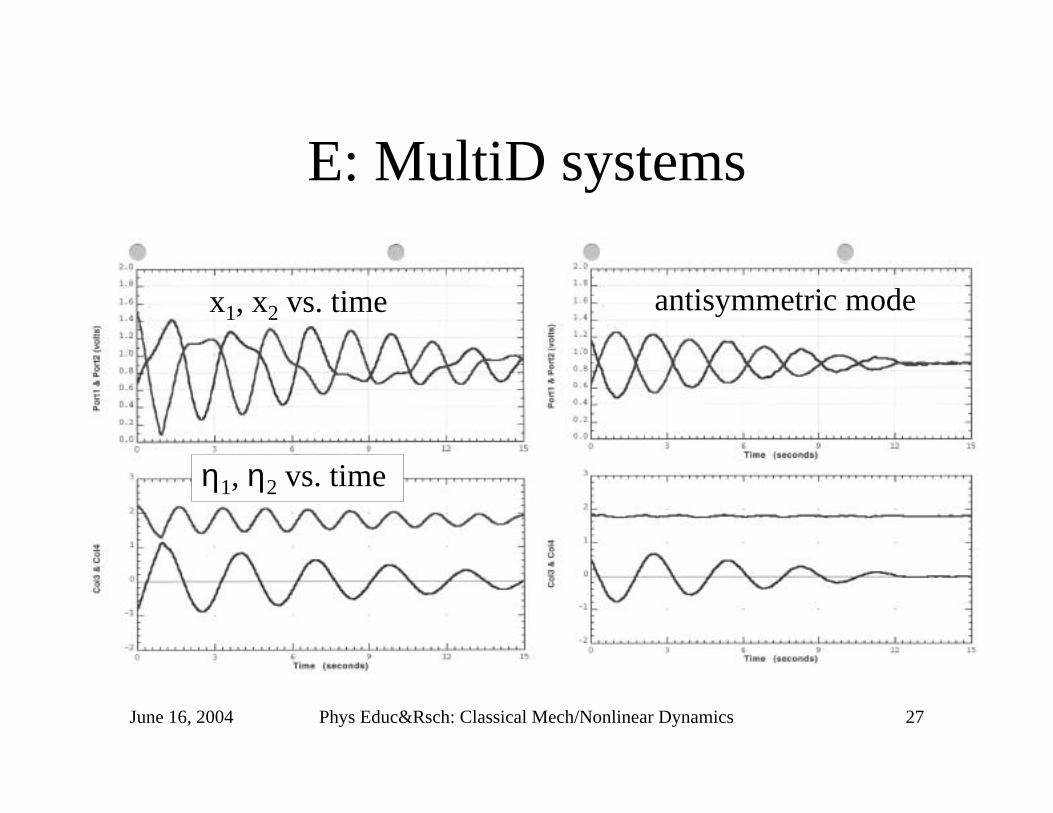
E: MultiD systems
• Coupled oscillators– Linearization, normal modes, eigenvalues,
eigenvectors, etc.
– Fourier spectral analysis
x1 x2 x1 x2
June 16, 2004 Phys Educ&Rsch: Classical Mech/Nonlinear Dynamics 27
E: MultiD systems
x1, x2 vs. time
η1, η2 vs. time
antisymmetric mode

June 16, 2004 Phys Educ&Rsch: Classical Mech/Nonlinear Dynamics 28
E: Ship Stability (computer)
• Forced,damped,nonlinear
Forcing frequency
Forc
ing
ampl
itude
June 16, 2004 Phys Educ&Rsch: Classical Mech/Nonlinear Dynamics 29
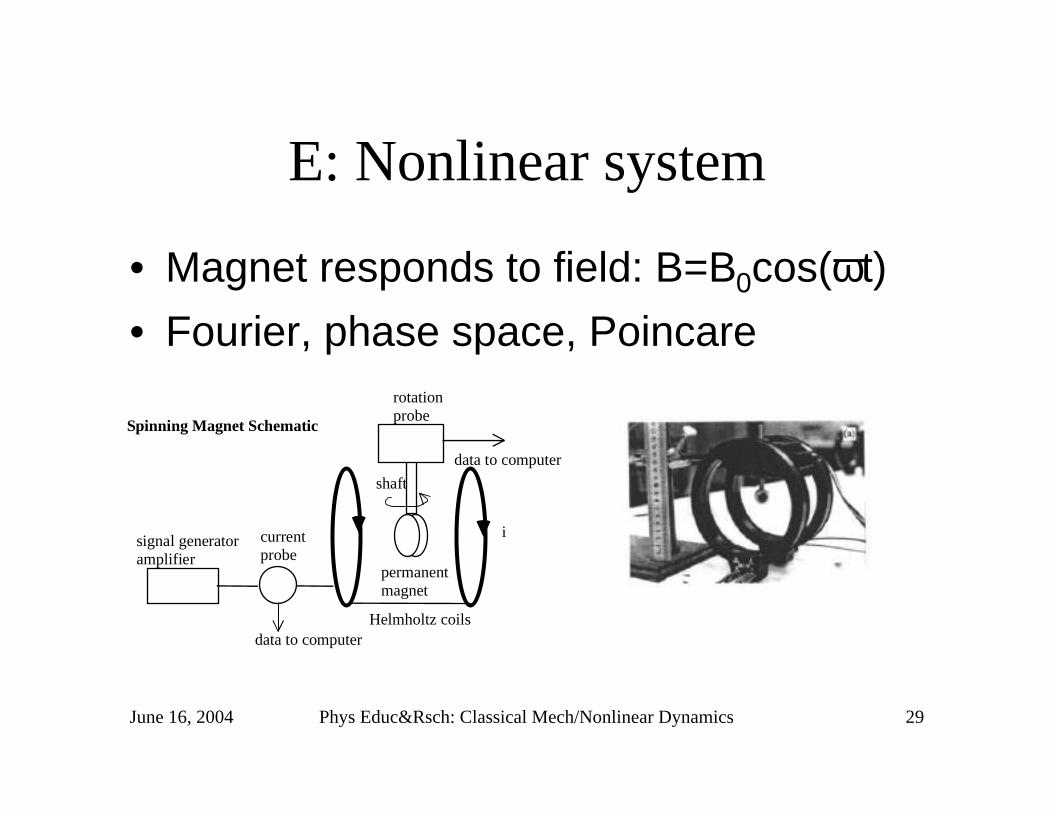
E: Nonlinear system
• Magnet responds to field: B=B0cos(ωt)
• Fourier, phase space, Poincare
signal generator amplifier
current probe
Helmholtz coils
rotation probe
shaft
permanent magnet
data to computer
data to computer
i
Spinning Magnet Schematic

June 16, 2004 Phys Educ&Rsch: Classical Mech/Nonlinear Dynamics 30
E: Nonlinear system
drive frequency
periodic doubled chaotic
pow
er s
pect
rum
frequency

June 16, 2004 Phys Educ&Rsch: Classical Mech/Nonlinear Dynamics 31
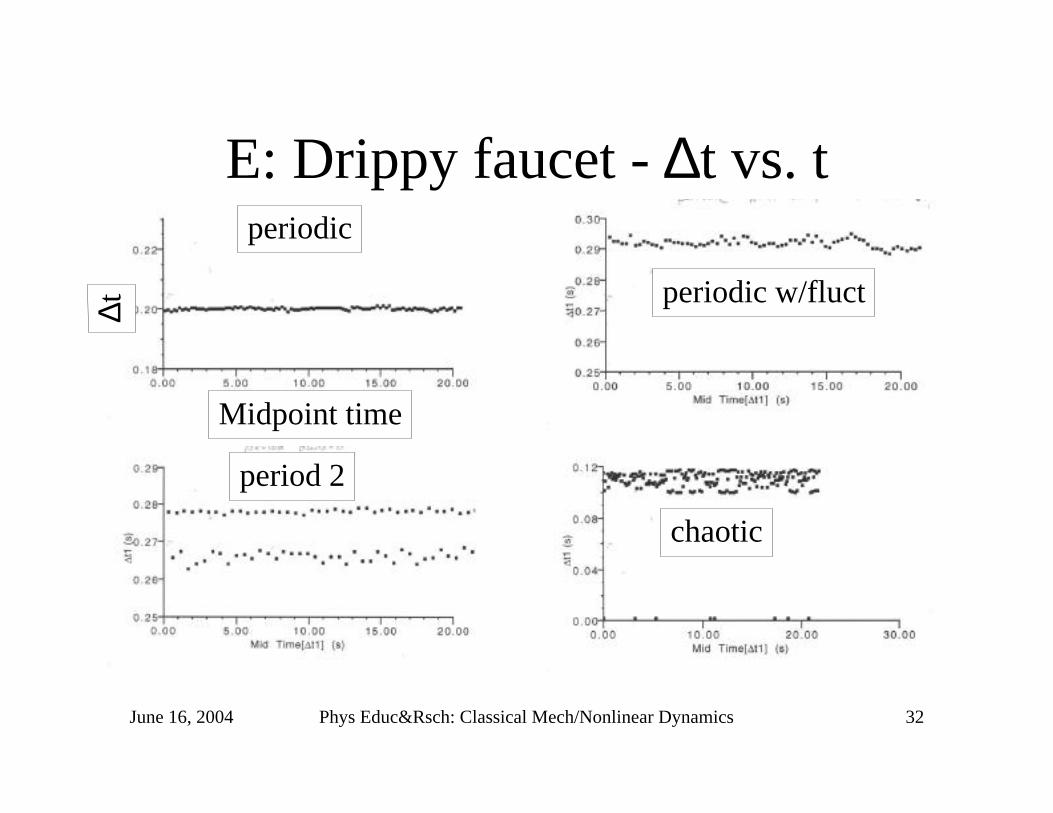
E: Discrete system-drippy faucet
• Display/analysistechniques– periodic
– period 2
– chaotic photogate
pump
drain tank
water tank
∆t
June 16, 2004 Phys Educ&Rsch: Classical Mech/Nonlinear Dynamics 32
E: Drippy faucet - ∆t vs. t∆t
Midpoint time
periodic
periodic w/fluct
period 2
chaotic

June 16, 2004 Phys Educ&Rsch: Classical Mech/Nonlinear Dynamics 33
E: Return maps ∆tn+1 vs. ∆tn
periodic
periodic w/fluct
period 2
chaotic
∆tn+
1
∆tn
June 16, 2004 Phys Educ&Rsch: Classical Mech/Nonlinear Dynamics 34
Projects (3 weeks)
• Individuals (a few pairs)
• From list, make new, extend existing– Proposal
– Construction/assembly/program
– Data/simulation and analysis
– Formal report

June 16, 2004 Phys Educ&Rsch: Classical Mech/Nonlinear Dynamics 35
P: Chaotic waterwheel
Difficult: construction details, reproducibilityspontaneously use the tools/techniques
June 16, 2004 Phys Educ&Rsch: Classical Mech/Nonlinear Dynamics 36
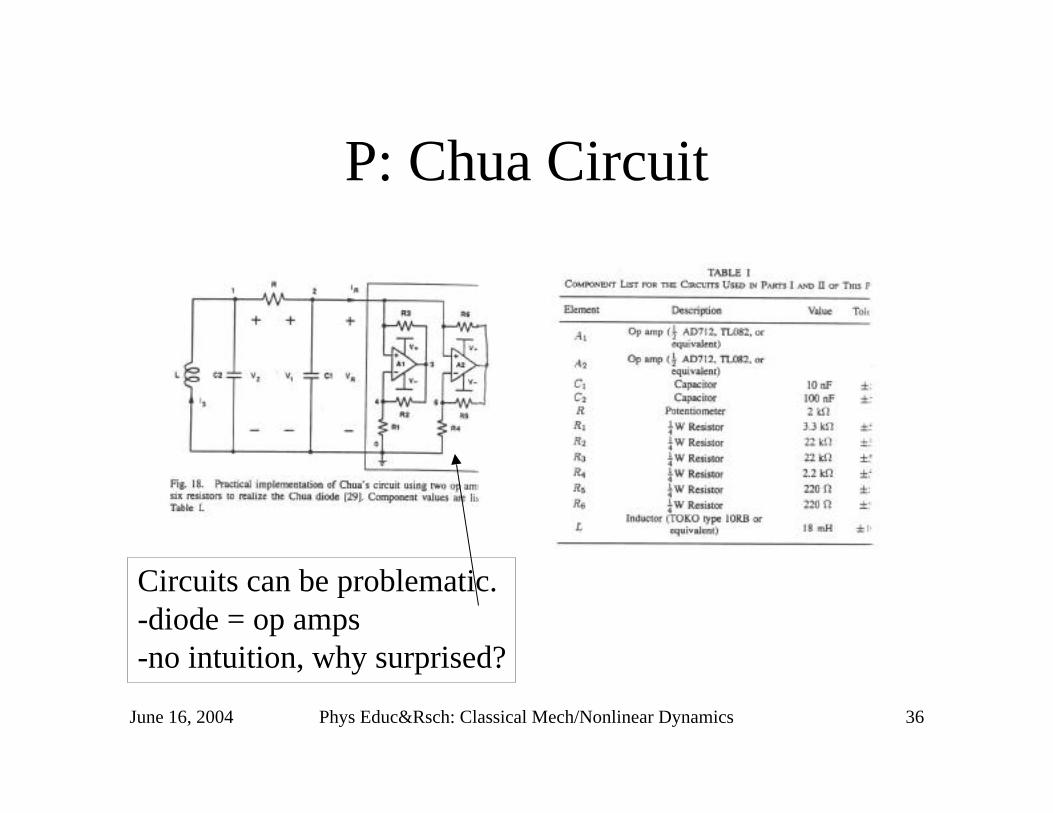
P: Chua Circuit
Circuits can be problematic.-diode = op amps-no intuition, why surprised?
June 16, 2004 Phys Educ&Rsch: Classical Mech/Nonlinear Dynamics 37
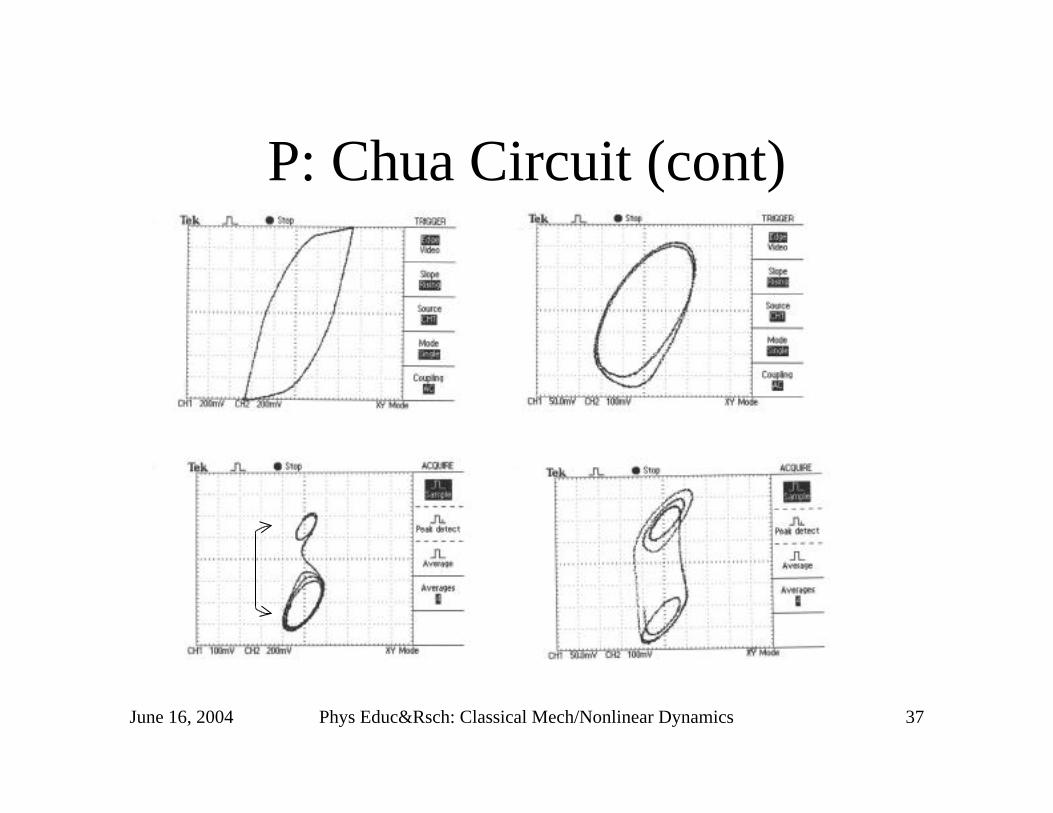
P: Chua Circuit (cont)

June 16, 2004 Phys Educ&Rsch: Classical Mech/Nonlinear Dynamics 38
P: Thrust Nozzle Exhaust PlumeRick BurnesAero. Engin.
∆t vs treturn map

June 16, 2004 Phys Educ&Rsch: Classical Mech/Nonlinear Dynamics 39
P: Inverted pendulum (Duffing)

June 16, 2004 Phys Educ&Rsch: Classical Mech/Nonlinear Dynamics 40
Inverted pendulumphase space power spectrum
June 16, 2004 Phys Educ&Rsch: Classical Mech/Nonlinear Dynamics 41
Other Student Projects
• Buckling beams
• Curie-point pendulum
• Double pendulum
• Patterns in heated fluids
• Terminal velocity w/ diff shapes/fluids
• Computer control of chaos
• Mercury beating heart

June 16, 2004 Phys Educ&Rsch: Classical Mech/Nonlinear Dynamics 42
Outcomes-Students
Level of difficulty: about as expected.
Workload: appropriate.
Experiments
8. Experiments helpful in understanding concepts? strongly agree.
9. The experiments taught material not covered in lectures: agree.
Project
10. The project was a good learning experience: strongly agree.
11. I enjoyed working on the project: agree to strongly agree.

June 16, 2004 Phys Educ&Rsch: Classical Mech/Nonlinear Dynamics 43
Outcomes-Students15. Computer was helpful in assisting the learning of material: agree-
strongly agree.
19. Amount learned in this course compared to other courses: more to alot more.
20. Experiments liked most: drippy faucet, coupled oscillators
⇒22. Best thing about course: labwork
23. Overall feeling about course: positive (4 out of 5, 5 = very positive).

June 16, 2004 Phys Educ&Rsch: Classical Mech/Nonlinear Dynamics 44
Issues for students
• New approach– Qualitative/numerical vs. analytical
• Application to real physical systems– symbols↔knobs
– “messy” and “noisy”
• Project time goes too quickly

June 16, 2004 Phys Educ&Rsch: Classical Mech/Nonlinear Dynamics 45
Future• New robust experiments
– Chemical oscillation
– Pendulum (Laws)
– Circuits (Sprott)
– Another mechanical bifurcation
• Variety of experiments– parallel tracks for different students

June 16, 2004 Phys Educ&Rsch: Classical Mech/Nonlinear Dynamics 46
Future (cont)
• Curriculum in physics– Some choice in upper division
• More/different faculty→experiments– biology, engineering,...
• Time management on “project”

June 16, 2004 Phys Educ&Rsch: Classical Mech/Nonlinear Dynamics 47
Conclusions
• Lab-based nonlinear dynamics course
• Uses readily available equipment
• “Typical” behaviors/characteristics
• Enthusiastic students and faculty
• Try it, you’ll like it

June 16, 2004 Phys Educ&Rsch: Classical Mech/Nonlinear Dynamics 48
Experiments not done
• Chemical oscillation– Actually messy, difficult quantitative
– “oooh, cool…”
• Inverted pendulum (Duffing)– Special care needed
• Diode circuit
June 16, 2004 Phys Educ&Rsch: Classical Mech/Nonlinear Dynamics 49
Outcomes-Students (I)
1. Level of difficulty of lecture: about as expected.
2. Level of difficulty of lab experiments: about as expected.
3. Course workload (time to complete assignments): appropriate.
4. Lab workload (time to complete lab reports): appropriate to longer thanappropriate.
5. Time required to complete the lab project: appropriate.
6. The pace of lecture instruction: slow to ok.
7. Clarity and ease of use of lab handouts: no consensus.
8. Experiments helpful in understanding concepts?: strongly agree.
9. The experiments taught material not covered in lectures : agree.
10. The project was a good learning experience: strongly agree.
11. I enjoyed working on the project: agree to strongly agree.
June 16, 2004 Phys Educ&Rsch: Classical Mech/Nonlinear Dynamics 50
Outcomes-Students (II)12. Work accurately evaluated by lecture instructor: agree.
13. Work accurately evaluated by lab instructor: agree.
14. I have been strongly motivated to learn course content: agree.
15. Computer was helpful in assisting the learning of material: agree-stronglyagree.
16. Text presented ideas clearly: neutral-strongly agree.
17. Class discussions of homework were useful: agree to strongly agree
18. Course has changed the way you think about and approach problems in yourfield compared to any other academic experience: a bit to a lot more.
19. Amount learned in this course compared to other courses: more to a lot more.
20. Experiments liked most: drippy faucet, coupled oscillators
21. Experiments liked least: ship stability
22. Best thing about course: labwork
23. Overall feeling about course: positive (4 out of 5, 5 = very positive).