matriz de uma transformação linear · matriz de uma transformação linear laura goulart uesb 9...
TRANSCRIPT

Matriz de uma transformação linear
Laura Goulart
UESB
9 de Outubro de 2018
Laura Goulart (UESB) Matriz de uma transformação linear 9 de Outubro de 2018 1 / 8
21 - Matriz de uma transformação linear
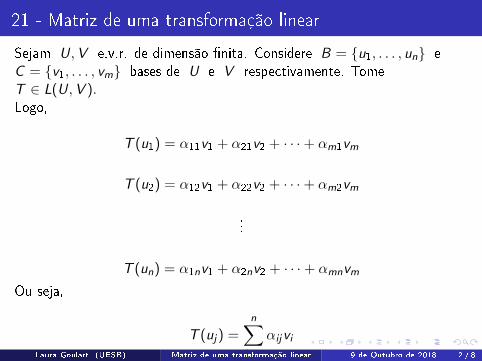
Sejam U,V e.v.r. de dimensão �nita. Considere B = {u1, . . . , un} eC = {v1, . . . , vm} bases de U e V respectivamente. TomeT ∈ L(U,V ).
Logo,
T (u1) = α11v1 + α21v2 + · · ·+ αm1vm
T (u2) = α12v1 + α22v2 + · · ·+ αm2vm
...
T (un) = α1nv1 + α2nv2 + · · ·+ αmnvm
Ou seja,
T (uj) =n∑
i=1
αijvi
Laura Goulart (UESB) Matriz de uma transformação linear 9 de Outubro de 2018 2 / 8
21 - Matriz de uma transformação linear
Sejam U,V e.v.r. de dimensão �nita. Considere B = {u1, . . . , un} eC = {v1, . . . , vm} bases de U e V respectivamente. TomeT ∈ L(U,V ).Logo,
T (u1) = α11v1 + α21v2 + · · ·+ αm1vm
T (u2) = α12v1 + α22v2 + · · ·+ αm2vm
...
T (un) = α1nv1 + α2nv2 + · · ·+ αmnvm
Ou seja,
T (uj) =n∑
i=1
αijvi
Laura Goulart (UESB) Matriz de uma transformação linear 9 de Outubro de 2018 2 / 8
21 - Matriz de uma transformação linear
Sejam U,V e.v.r. de dimensão �nita. Considere B = {u1, . . . , un} eC = {v1, . . . , vm} bases de U e V respectivamente. TomeT ∈ L(U,V ).Logo,
T (u1) = α11v1 + α21v2 + · · ·+ αm1vm
T (u2) = α12v1 + α22v2 + · · ·+ αm2vm
...
T (un) = α1nv1 + α2nv2 + · · ·+ αmnvm
Ou seja,
T (uj) =n∑
i=1
αijvi
Laura Goulart (UESB) Matriz de uma transformação linear 9 de Outubro de 2018 2 / 8

21 - Matriz de uma transformação linear
Sejam U,V e.v.r. de dimensão �nita. Considere B = {u1, . . . , un} eC = {v1, . . . , vm} bases de U e V respectivamente. TomeT ∈ L(U,V ).Logo,
T (u1) = α11v1 + α21v2 + · · ·+ αm1vm
T (u2) = α12v1 + α22v2 + · · ·+ αm2vm
...
T (un) = α1nv1 + α2nv2 + · · ·+ αmnvm
Ou seja,
T (uj) =n∑
i=1
αijvi
Laura Goulart (UESB) Matriz de uma transformação linear 9 de Outubro de 2018 2 / 8
21 - Matriz de uma transformação linear
Sejam U,V e.v.r. de dimensão �nita. Considere B = {u1, . . . , un} eC = {v1, . . . , vm} bases de U e V respectivamente. TomeT ∈ L(U,V ).Logo,
T (u1) = α11v1 + α21v2 + · · ·+ αm1vm
T (u2) = α12v1 + α22v2 + · · ·+ αm2vm
...
T (un) = α1nv1 + α2nv2 + · · ·+ αmnvm
Ou seja,
T (uj) =n∑
i=1
αijvi
Laura Goulart (UESB) Matriz de uma transformação linear 9 de Outubro de 2018 2 / 8
21 - Matriz de uma transformação linear
Sejam U,V e.v.r. de dimensão �nita. Considere B = {u1, . . . , un} eC = {v1, . . . , vm} bases de U e V respectivamente. TomeT ∈ L(U,V ).Logo,
T (u1) = α11v1 + α21v2 + · · ·+ αm1vm
T (u2) = α12v1 + α22v2 + · · ·+ αm2vm
...
T (un) = α1nv1 + α2nv2 + · · ·+ αmnvm
Ou seja,
T (uj) =n∑
i=1
αijviLaura Goulart (UESB) Matriz de uma transformação linear 9 de Outubro de 2018 2 / 8

A matriz (αij) é chamada matriz de T em relação as bases B e C edenotada por [T ]BC .
Laura Goulart (UESB) Matriz de uma transformação linear 9 de Outubro de 2018 3 / 8

Exemplos
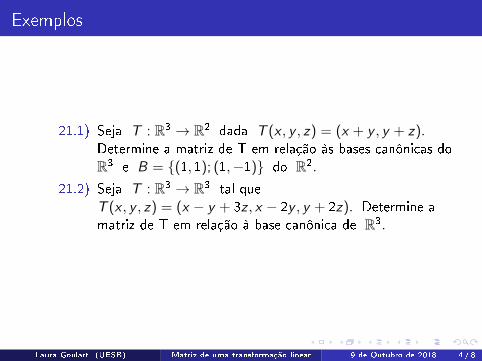
21.1) Seja T : R3 → R2 dada T (x , y , z) = (x + y , y + z).Determine a matriz de T em relação às bases canônicas doR3 e B = {(1, 1); (1,−1)} do R2.
21.2) Seja T : R3 → R3 tal queT (x , y , z) = (x − y + 3z , x − 2y , y + 2z). Determine amatriz de T em relação à base canônica de R3.
Laura Goulart (UESB) Matriz de uma transformação linear 9 de Outubro de 2018 4 / 8
Exemplos
21.1) Seja T : R3 → R2 dada T (x , y , z) = (x + y , y + z).Determine a matriz de T em relação às bases canônicas doR3 e B = {(1, 1); (1,−1)} do R2.
21.2) Seja T : R3 → R3 tal queT (x , y , z) = (x − y + 3z , x − 2y , y + 2z). Determine amatriz de T em relação à base canônica de R3.
Laura Goulart (UESB) Matriz de uma transformação linear 9 de Outubro de 2018 4 / 8
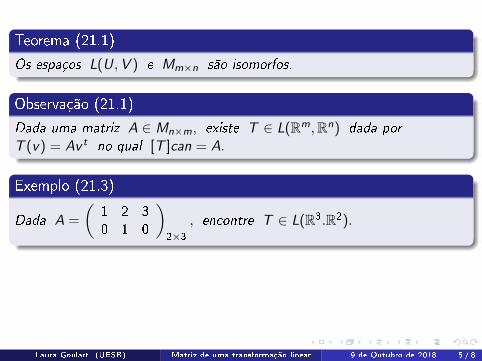
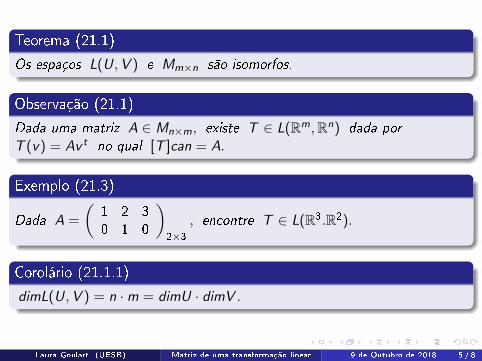
Teorema (21.1)
Os espaços L(U,V ) e Mm×n são isomorfos.
Observação (21.1)
Dada uma matriz A ∈ Mn×m, existe T ∈ L(Rm,Rn) dada por
T (v) = Av t no qual [T ]can = A.
Exemplo (21.3)
Dada A =
(1 2 30 1 0
)2×3
, encontre T ∈ L(R3.R2).
Corolário (21.1.1)
dimL(U,V ) = n ·m = dimU · dimV .
Laura Goulart (UESB) Matriz de uma transformação linear 9 de Outubro de 2018 5 / 8

Teorema (21.1)
Os espaços L(U,V ) e Mm×n são isomorfos.
Observação (21.1)
Dada uma matriz A ∈ Mn×m, existe T ∈ L(Rm,Rn) dada por
T (v) = Av t no qual [T ]can = A.
Exemplo (21.3)
Dada A =
(1 2 30 1 0
)2×3
, encontre T ∈ L(R3.R2).
Corolário (21.1.1)
dimL(U,V ) = n ·m = dimU · dimV .
Laura Goulart (UESB) Matriz de uma transformação linear 9 de Outubro de 2018 5 / 8
Teorema (21.1)
Os espaços L(U,V ) e Mm×n são isomorfos.
Observação (21.1)
Dada uma matriz A ∈ Mn×m, existe T ∈ L(Rm,Rn) dada por
T (v) = Av t no qual [T ]can = A.
Exemplo (21.3)
Dada A =
(1 2 30 1 0
)2×3
, encontre T ∈ L(R3.R2).
Corolário (21.1.1)
dimL(U,V ) = n ·m = dimU · dimV .
Laura Goulart (UESB) Matriz de uma transformação linear 9 de Outubro de 2018 5 / 8
Teorema (21.1)
Os espaços L(U,V ) e Mm×n são isomorfos.
Observação (21.1)
Dada uma matriz A ∈ Mn×m, existe T ∈ L(Rm,Rn) dada por
T (v) = Av t no qual [T ]can = A.
Exemplo (21.3)
Dada A =
(1 2 30 1 0
)2×3
, encontre T ∈ L(R3.R2).
Corolário (21.1.1)
dimL(U,V ) = n ·m = dimU · dimV .
Laura Goulart (UESB) Matriz de uma transformação linear 9 de Outubro de 2018 5 / 8
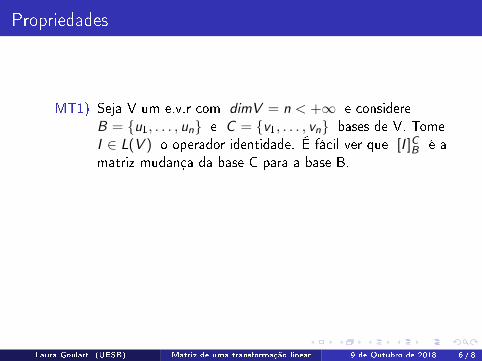
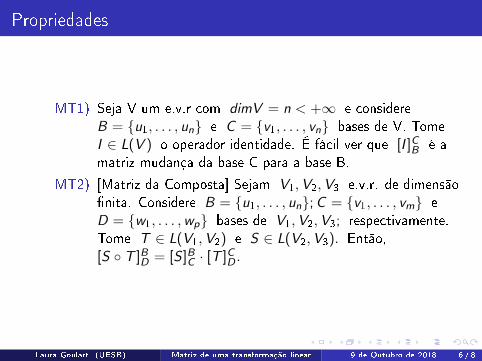
Propriedades
MT1) Seja V um e.v.r com dimV = n < +∞ e considereB = {u1, . . . , un} e C = {v1, . . . , vn} bases de V. TomeI ∈ L(V ) o operador identidade. É fácil ver que [I ]CB é amatriz mudança da base C para a base B.
MT2) [Matriz da Composta] Sejam V1,V2,V3 e.v.r. de dimensão�nita. Considere B = {u1, . . . , un};C = {v1, . . . , vm} eD = {w1, . . . ,wp} bases de V1,V2,V3; respectivamente.Tome T ∈ L(V1,V2) e S ∈ L(V2,V3). Então,[S ◦ T ]BD = [S ]BC · [T ]CD .
Laura Goulart (UESB) Matriz de uma transformação linear 9 de Outubro de 2018 6 / 8
Propriedades
MT1) Seja V um e.v.r com dimV = n < +∞ e considereB = {u1, . . . , un} e C = {v1, . . . , vn} bases de V. TomeI ∈ L(V ) o operador identidade. É fácil ver que [I ]CB é amatriz mudança da base C para a base B.
MT2) [Matriz da Composta] Sejam V1,V2,V3 e.v.r. de dimensão�nita. Considere B = {u1, . . . , un};C = {v1, . . . , vm} eD = {w1, . . . ,wp} bases de V1,V2,V3; respectivamente.Tome T ∈ L(V1,V2) e S ∈ L(V2,V3). Então,[S ◦ T ]BD = [S ]BC · [T ]CD .
Laura Goulart (UESB) Matriz de uma transformação linear 9 de Outubro de 2018 6 / 8

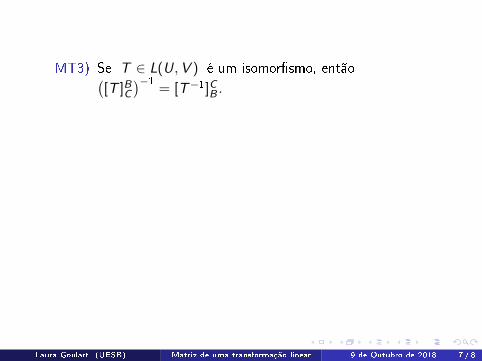
MT3) Se T ∈ L(U,V ) é um isomor�smo, então([T ]BC
)−1= [T−1]CB .
MT4) [T (v)]C = [T ]BC · [v ]B .
Exemplo (21.4)
Seja T ∈ L(R2,R3) tal que [T ]canB =
1 −10 1−2 3
, onde
B = {(1, 0, 1); (−2, 0, 1); (0, 1, 0) é base do R3. Qual é a imagem do
vetor u = (2,−3) por T.
Laura Goulart (UESB) Matriz de uma transformação linear 9 de Outubro de 2018 7 / 8
MT3) Se T ∈ L(U,V ) é um isomor�smo, então([T ]BC
)−1= [T−1]CB .
MT4) [T (v)]C = [T ]BC · [v ]B .
Exemplo (21.4)
Seja T ∈ L(R2,R3) tal que [T ]canB =
1 −10 1−2 3
, onde
B = {(1, 0, 1); (−2, 0, 1); (0, 1, 0) é base do R3. Qual é a imagem do
vetor u = (2,−3) por T.
Laura Goulart (UESB) Matriz de uma transformação linear 9 de Outubro de 2018 7 / 8
MT3) Se T ∈ L(U,V ) é um isomor�smo, então([T ]BC
)−1= [T−1]CB .
MT4) [T (v)]C = [T ]BC · [v ]B .
Exemplo (21.4)
Seja T ∈ L(R2,R3) tal que [T ]canB =
1 −10 1−2 3
, onde
B = {(1, 0, 1); (−2, 0, 1); (0, 1, 0) é base do R3. Qual é a imagem do
vetor u = (2,−3) por T.
Laura Goulart (UESB) Matriz de uma transformação linear 9 de Outubro de 2018 7 / 8
MT3) Se T ∈ L(U,V ) é um isomor�smo, então([T ]BC
)−1= [T−1]CB .
MT4) [T (v)]C = [T ]BC · [v ]B .
Exemplo (21.4)
Seja T ∈ L(R2,R3) tal que [T ]canB =
1 −10 1−2 3
, onde
B = {(1, 0, 1); (−2, 0, 1); (0, 1, 0) é base do R3. Qual é a imagem do
vetor u = (2,−3) por T.
Laura Goulart (UESB) Matriz de uma transformação linear 9 de Outubro de 2018 7 / 8

MT5) Seja V um e.v.r. com dimV = n < +∞ e considereB = {u1, . . . , un} e C = {v1, . . . , vn} bases de V. TomeT ∈ L(V ). Então,
[T ]C = M−1 · [T ]B ·M,
onde M é a matriz mudança da base C para a base B.
Laura Goulart (UESB) Matriz de uma transformação linear 9 de Outubro de 2018 8 / 8