mathcad - student test feeder
TRANSCRIPT

Four Node Test System with Induction Motor
3 4Delta LoadY Load
Motor
1 2Reg Line
s R
VLL4VLG3VLG2VLGRVLG1VLGS
IS IR I 2 I3I t
I 4abcIM
I4ldI3ld
Define standard matrices:
Symmetrical Componenttransformation matrix
as 1 ej 120⋅ deg⋅⋅:= As
1
1
1
1
as2
as
1
as
as2
⎛⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎠
:=
Phase shift matrix usedfor three-phase Inductionmachine modeling
ts1
3ej 30⋅ deg⋅⋅:= T
1
0
0
0
ts⎯
0
0
0
ts
⎛⎜⎜⎜⎝
⎞⎟⎟⎟⎠
:=
Matrix used to compute equivalentline-to-neutral knowing line-to-linevoltages.
W13
2
0
1
1
2
0
0
1
2
⎛⎜⎜⎝
⎞⎟⎟⎠
⋅:=
Matrix used to convert line-to-neutralvoltages to line-to-line voltages.
D
1
0
1−
1−
1
0
0
1−
1
⎛⎜⎜⎝
⎞⎟⎟⎠
:=
Unity matrix U
1
0
0
0
1
0
0
0
1
⎛⎜⎜⎝
⎞⎟⎟⎠
:=
Matrix used to compute line currentsinto a delta connected load. DI
1
1−
0
0
1
1−
1−
0
1
⎛⎜⎜⎝
⎞⎟⎟⎠
:=
C:\Milsoft 2009 Evaluation\Student test feeder\Try 2.xmcd 1

Line data:
4.0'
2.5' 4.5'
3.0'
a b c
n
25.0'
Phase Conductors: 336,400 26/7 ACSR
Neutral Conductor: 4/0 6/1 ACSR
Length of line: 2.0 miles
Dist 2.0:= miles
Define conductor positions:
d1 0 j 29⋅+:= d2 2.5 j 29⋅+:= d3 7.0 j 29⋅+:= d4 4.0 j 25⋅+:=
Compute self and image distances:
n 1 4..:= m 1 4..:=
Dxn m, dn dm−:= Dx
0
2.5
7
5.6569
2.5
0
4.5
4.272
7
4.5
0
5
5.6569
4.272
5
0
⎛⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎠
=
Sxn m, dn dm⎯
−:= Sx
58
58.0539
58.4209
54.1479
58.0539
58
58.1743
54.0208
58.4209
58.1743
58
54.0833
54.1479
54.0208
54.0833
50
⎛⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎠
=
Input conductor data:
i 1 3..:= GMRi .0244:= ri .306:= Diai 0.741:= RDi
Diai
24:= RD1 0.0309=
j 1 3..:= GMR4 .00814:= r4 .592:= Dia4 0.563:= RD4
Dia4
24:= RD4 0.0235=
C:\Milsoft 2009 Evaluation\Student test feeder\Try 2.xmcd 2

Define diagonal term of distance matrix:
Dxi i, GMRi:= Dx4 4, GMR4:=
Display final distance matrix:
Dx
0.0244
2.5
7
5.6569
2.5
0.0244
4.5
4.272
7
4.5
0.0244
5
5.6569
4.272
5
0.0081
⎛⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎠
= ft.
Carson's equations:
zpn m, 0.0953 j .12134⋅ ln1
Dxn m,
⎛⎜⎝
⎞⎟⎠
7.93402+⎛⎜⎝
⎞⎟⎠
⋅+:=
zpn n, rn zpn n,+:=
Display primitive impedance matrix:
zp
0.4013 1.4133j+
0.0953 0.8515j+
0.0953 0.7266j+
0.0953 0.7524j+
0.0953 0.8515j+
0.4013 1.4133j+
0.0953 0.7802j+
0.0953 0.7865j+
0.0953 0.7266j+
0.0953 0.7802j+
0.4013 1.4133j+
0.0953 0.7674j+
0.0953 0.7524j+
0.0953 0.7865j+
0.0953 0.7674j+
0.6873 1.5465j+
⎛⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎠
=
Partition zp to set up for Kron reduction:
zij submatrix zp 1, 3, 1, 3,( ):= zij
0.4013 1.4133j+
0.0953 0.8515j+
0.0953 0.7266j+
0.0953 0.8515j+
0.4013 1.4133j+
0.0953 0.7802j+
0.0953 0.7266j+
0.0953 0.7802j+
0.4013 1.4133j+
⎛⎜⎜⎝
⎞⎟⎟⎠
=
zin submatrix zp 1, 3, 4, 4,( ):= zin
0.0953 0.7524j+
0.0953 0.7865j+
0.0953 0.7674j+
⎛⎜⎜⎝
⎞⎟⎟⎠
=
znj submatrix zp 4, 4, 1, 3,( ):= znj 0.0953 0.7524j+ 0.0953 0.7865j+ 0.0953 0.7674j+( )=
znn submatrix zp 4, 4, 4, 4,( ):= znn 0.6873 1.5465j+( )=
C:\Milsoft 2009 Evaluation\Student test feeder\Try 2.xmcd 3

Kron Reduction:
zabc zij zin znn 1−⋅ znj⋅−:=
Display phase impedance matrix:
zabc
0.4576 1.078j+
0.156 0.5017j+
0.1535 0.3849j+
0.156 0.5017j+
0.4666 1.0482j+
0.158 0.4236j+
0.1535 0.3849j+
0.158 0.4236j+
0.4615 1.0651j+
⎛⎜⎜⎝
⎞⎟⎟⎠
= Ω/mile
Admittance calculations:
Compute potential coefficient matrix:
Pn m, 11.17689 lnSxn m,
Dxn m,
⎛⎜⎜⎝
⎞⎟⎟⎠
⋅:= Pn n, 11.17689 lnSxn n,
RDn
⎛⎜⎜⎝
⎞⎟⎟⎠
⋅:=
Display potential coefficient matrix:
P
84.2542
35.1522
23.7147
25.2469
35.1522
84.2542
28.6058
28.359
23.7147
28.6058
84.2542
26.6131
25.2469
28.359
26.6131
85.6659
⎛⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎠
=
Partition P to set up for Kron reduction:
pij submatrix P 1, 3, 1, 3,( ):= pij
84.2542
35.1522
23.7147
35.1522
84.2542
28.6058
23.7147
28.6058
84.2542
⎛⎜⎜⎝
⎞⎟⎟⎠
=
pin submatrix P 1, 3, 4, 4,( ):= pin
25.2469
28.359
26.6131
⎛⎜⎜⎝
⎞⎟⎟⎠
=
pnj submatrix P 4, 4, 1, 3,( ):= pnj 25.2469 28.359 26.6131( )=
pnn submatrix P 4, 4, 4, 4,( ):= pnn 85.6659( )=
C:\Milsoft 2009 Evaluation\Student test feeder\Try 2.xmcd 4
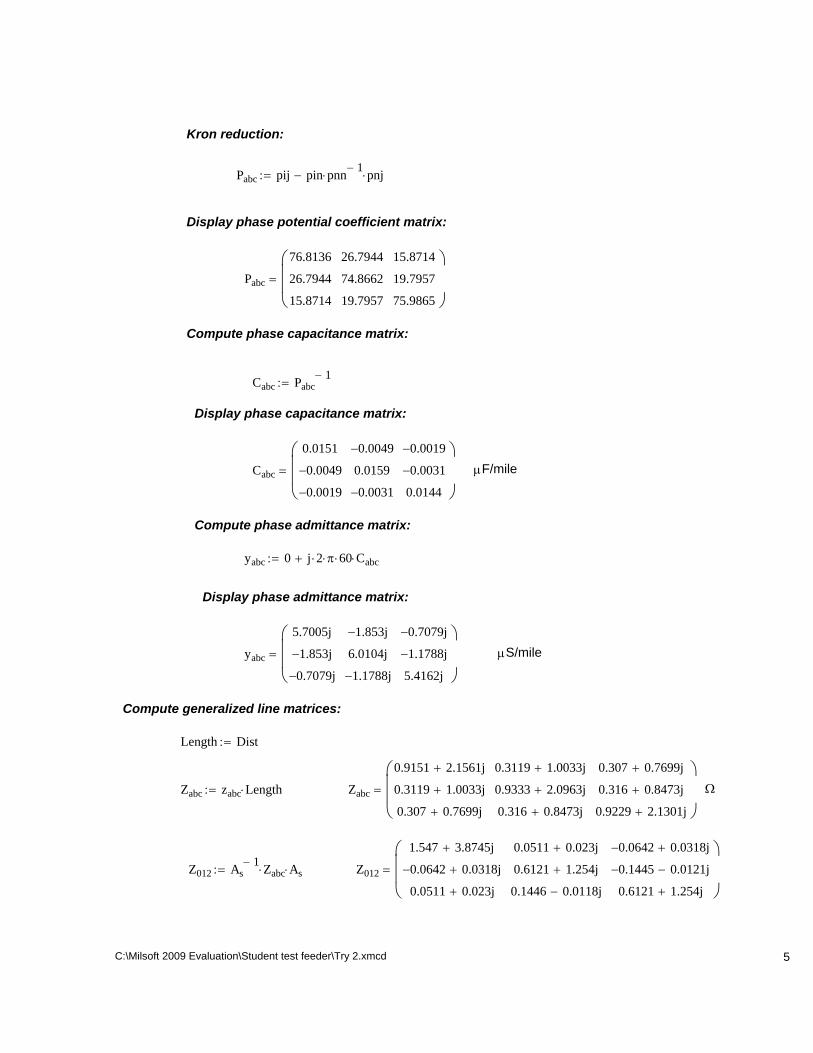
Kron reduction:
Pabc pij pin pnn 1−⋅ pnj⋅−:=
Display phase potential coefficient matrix:
Pabc
76.8136
26.7944
15.8714
26.7944
74.8662
19.7957
15.8714
19.7957
75.9865
⎛⎜⎜⎝
⎞⎟⎟⎠
=
Compute phase capacitance matrix:
Cabc Pabc1−
:=
Display phase capacitance matrix:
Cabc
0.0151
0.0049−
0.0019−
0.0049−
0.0159
0.0031−
0.0019−
0.0031−
0.0144
⎛⎜⎜⎝
⎞⎟⎟⎠
= μF/mile
Compute phase admittance matrix:
yabc 0 j 2⋅ π⋅ 60⋅ Cabc⋅+:=
Display phase admittance matrix:
yabc
5.7005j
1.853j−
0.7079j−
1.853j−
6.0104j
1.1788j−
0.7079j−
1.1788j−
5.4162j
⎛⎜⎜⎝
⎞⎟⎟⎠
= μS/mile
Compute generalized line matrices:
Length Dist:=
Zabc zabc Length⋅:= Zabc
0.9151 2.1561j+
0.3119 1.0033j+
0.307 0.7699j+
0.3119 1.0033j+
0.9333 2.0963j+
0.316 0.8473j+
0.307 0.7699j+
0.316 0.8473j+
0.9229 2.1301j+
⎛⎜⎜⎝
⎞⎟⎟⎠
= Ω
Z012 As1− Zabc⋅ As⋅:= Z012
1.547 3.8745j+
0.0642− 0.0318j+
0.0511 0.023j+
0.0511 0.023j+
0.6121 1.254j+
0.1446 0.0118j−
0.0642− 0.0318j+
0.1445− 0.0121j−
0.6121 1.254j+
⎛⎜⎜⎝
⎞⎟⎟⎠
=
C:\Milsoft 2009 Evaluation\Student test feeder\Try 2.xmcd 5

Yabc yabc Length⋅ 10 6−⋅:= Yabc
1.1401j 10 5−×
3.706j− 10 6−×
1.4159j− 10 6−×
3.706j− 10 6−×
1.2021j 10 5−×
2.3575j− 10 6−×
1.4159j− 10 6−×
2.3575j− 10 6−×
1.0832j 10 5−×
⎛⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎠
= S
aline U12
Zabc⋅ Yabc⋅+:=
aline
0.99999011 0.00000442j+
0.00000124− 0.00000018j−
0.00000131− 0.00000051j+
0.00000113− 0.00000018j−
0.99999026 0.00000466j+
0.00000116− 0.00000024j+
0.00000146− 0.00000065j+
0.00000141− 0.00000039j+
0.99999001 0.00000441j+
⎛⎜⎜⎝
⎞⎟⎟⎠
=
bline Zabc:= bline
0.9151 2.1561j+
0.3119 1.0033j+
0.307 0.7699j+
0.3119 1.0033j+
0.9333 2.0963j+
0.316 0.8473j+
0.307 0.7699j+
0.316 0.8473j+
0.9229 2.1301j+
⎛⎜⎜⎝
⎞⎟⎟⎠
=
cline Yabc14
Yabc⋅ Zabc⋅ Yabc⋅+:=
cline
2.5166− 10 11−× 1.1401j 10 5−
×+
9.8471 10 12−× 3.706j 10 6−
×−
1.5637 10 13−× 1.4159j 10 6−
×−
9.8471 10 12−× 3.706j 10 6−
×−
2.8054− 10 11−× 1.2021j 10 5−
×+
4.0481 10 12−× 2.3575j 10 6−
×−
1.5637 10 13−× 1.4159j 10 6−
×−
4.0481 10 12−× 2.3575j 10 6−
×−
2.2962− 10 11−× 1.0832j 10 5−
×+
⎛⎜⎜⎜⎜⎝
=
dline aline:=
Aline aline1−
:=
Aline
1.00000989 0.00000442j−
0.00000124 0.00000018j+
0.00000131 0.00000051j−
0.00000113 0.00000018j+
1.00000974 0.00000466j−
0.00000116 0.00000024j−
0.00000146 0.00000065j−
0.00000141 0.00000039j−
1.00000999 0.00000441j−
⎛⎜⎜⎝
⎞⎟⎟⎠
=
Bline aline1− bline⋅:= Bline
0.9151 2.1561j+
0.3119 1.0034j+
0.307 0.7699j+
0.3119 1.0034j+
0.9333 2.0963j+
0.316 0.8473j+
0.307 0.7699j+
0.316 0.8473j+
0.923 2.1301j+
⎛⎜⎜⎝
⎞⎟⎟⎠
=
C:\Milsoft 2009 Evaluation\Student test feeder\Try 2.xmcd 6

Read in substation transformer data:
kVA 12000:= kVLLhi 115:= Delta kVLLlo 12.47:= Wye
kVLNlokVLLlo
3:= kVLNlo 7.1996=
Zpusub .01 j .1⋅+:= Per-unit
Compute transformer Z on low side:
ZbaselokVLLlo
2 1000⋅
kVA:= Zbaselo 12.9584=
Zsub Zpusub Zbaselo⋅:= Zsub 0.1296 1.2958j+=
Define Zt matrix:
Zsubabc
Zsub
0
0
0
Zsub
0
0
0
Zsub
⎛⎜⎜⎜⎝
⎞⎟⎟⎟⎠
:=
Compute turns ratio:
ntkVLLhi
kVLNlo:= nt 15.9732=
Compute substation transformer matrices:
asubnt−
3
0
1
2
2
0
1
1
2
0
⎛⎜⎜⎝
⎞⎟⎟⎠
⋅:= asub
0
5.3244−
10.6488−
10.6488−
0
5.3244−
5.3244−
10.6488−
0
⎛⎜⎜⎝
⎞⎟⎟⎠
=
bsub asub Zsubabc⋅:=
bsub
0
0.69− 6.8996j−
1.3799− 13.7992j−
1.3799− 13.7992j−
0
0.69− 6.8996j−
0.69− 6.8996j−
1.3799− 13.7992j−
0
⎛⎜⎜⎝
⎞⎟⎟⎠
=
csub
0
0
0
0
0
0
0
0
0
⎛⎜⎜⎝
⎞⎟⎟⎠
:=
C:\Milsoft 2009 Evaluation\Student test feeder\Try 2.xmcd 7

dsub1nt
1
0
1−
1−
1
0
0
1−
1
⎛⎜⎜⎝
⎞⎟⎟⎠
⋅:= dsub
0.0626
0
0.0626−
0.0626−
0.0626
0
0
0.0626−
0.0626
⎛⎜⎜⎝
⎞⎟⎟⎠
=
Bsub asub1− bsub⋅:= Bsub
0.1296 1.2958j+
0
0
0
0.1296 1.2958j+
0
0
0
0.1296 1.2958j+
⎛⎜⎜⎝
⎞⎟⎟⎠
=
Asub1nt
1
1−
0
0
1
1−
1−
0
1
⎛⎜⎜⎝
⎞⎟⎟⎠
⋅:= Asub
0.0626
0.0626−
0
0
0.0626
0.0626−
0.0626−
0
0.0626
⎛⎜⎜⎝
⎞⎟⎟⎠
=
Read in data for three type B step voltage regulators connected inwye.
Potential transformer ratio: Npt7200120
:= Npt 60=
Current transformer primary rating:
CTp 500:= CTc 0.1:= CTCTp
CTc:= CT 5000=
Compensator settings:
RComp 4.9:= XComp 10.0:= volts
ZohmsRComp j XComp⋅+
CTc:= Zohms 49 100j+= Ohms
Set desired voltage level:
Vset 125:=
Vlevel
Vset
Vset
Vset
⎛⎜⎜⎜⎝
⎞⎟⎟⎟⎠
:=
Set initial tap positions:
Tap
0
0
0
⎛⎜⎜⎝
⎞⎟⎟⎠
:=
Compute initial matrices:
ari1 .00625 Tapi⋅−:= ar
1
1
1
⎛⎜⎜⎝
⎞⎟⎟⎠
=
C:\Milsoft 2009 Evaluation\Student test feeder\Try 2.xmcd 8

aR
ar1
0
0
0
ar2
0
0
0
ar3
⎛⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎠
:= aR
1
0
0
0
1
0
0
0
1
⎛⎜⎜⎝
⎞⎟⎟⎠
=
dR aR1−
:= dR
1
0
0
0
1
0
0
0
1
⎛⎜⎜⎝
⎞⎟⎟⎠
=
AR dR:= AR
1
0
0
0
1
0
0
0
1
⎛⎜⎜⎝
⎞⎟⎟⎠
=
Read in equivalent system data:
kVLLs 115:= kVLNskVLLs
3:= kVLNs 66.3953=
Vpus 1.05000:=
Z1sys 5.6261 j 27.408⋅+:= Ω on 115 kV side
Z0sys 18.5865 j 122.4028⋅+:= Ω on 115 kV side
Build system sequence impedance matrix:
Zsys012
Z0sys
0
0
0
Z1sys
0
0
0
Z1sys
⎛⎜⎜⎜⎝
⎞⎟⎟⎟⎠
:= Zsys012
18.5865 122.4028j+
0
0
0
5.6261 27.408j+
0
0
0
5.6261 27.408j+
⎛⎜⎜⎝
=
Compute system phase impedance matrix:
Zsysabc As1− Zsys012⋅ As⋅:= Zsysabc
9.9462 59.0729j+
4.3201 31.6649j+
4.3201 31.6649j+
4.3201 31.6649j+
9.9462 59.0729j+
4.3201 31.6649j+
4.3201 31.6649j+
4.3201 31.6649j+
9.9462 59.0729j+
⎛⎜⎜⎝
⎞
⎠=
Compute system phase matrices:
asys U:= asys
1
0
0
0
1
0
0
0
1
⎛⎜⎜⎝
⎞⎟⎟⎠
=
bsys Zsysabc:= bsys
9.9462 59.0729j+
4.3201 31.6649j+
4.3201 31.6649j+
4.3201 31.6649j+
9.9462 59.0729j+
4.3201 31.6649j+
4.3201 31.6649j+
4.3201 31.6649j+
9.9462 59.0729j+
⎛⎜⎜⎝
⎞⎟⎟⎠
=
C:\Milsoft 2009 Evaluation\Student test feeder\Try 2.xmcd 9

csys
0
0
0
0
0
0
0
0
0
⎛⎜⎜⎝
⎞⎟⎟⎠
:=
dsys asys:=
Asys U:=
Bsys bsys:=
Input node 3 wye connected load data:
kW312000:= PF31
.95:= Lagging
kW321500:= PF32
.95:= Lagging
kW331000:= PF33
.90:= Lagging
SL3i
kW3i
PF3i
ej acos PF3i( )⋅
⋅:= SL3
2000 657.3682j+
1500 493.0262j+
1000 484.3221j+
⎛⎜⎜⎝
⎞⎟⎟⎠
=
Input the motor transformer data
kVAx 2500:= kVLLxhi 12.470:= Y kVLLxlo .480:= Y
Zpux .010 j .050⋅+:=
Compute abcd transformer parameters:
kVLNxhikVLLxhi
3:= kVLNxlo
kVLLxlo
3:=
nxkVLNxhi
kVLNxlo:= nx 25.9792= ax
kVLLxhi
kVLLxlo:= ax 25.9792=
ZbasekVLLxlo
2 1000⋅
kVAx:= Zbase 0.0922=
Zt Zpux Zbase⋅:= Zt 0.0009 0.0046j+=
Ztabc
Zt
0
0
0
Zt
0
0
0
Zt
⎛⎜⎜⎜⎝
⎞⎟⎟⎟⎠
:= Ztabc
0.0009 0.0046j+
0
0
0
0.0009 0.0046j+
0
0
0
0.0009 0.0046j+
⎛⎜⎜⎝
⎞⎟⎟⎠
=
C:\Milsoft 2009 Evaluation\Student test feeder\Try 2.xmcd 10

AV nx U⋅:= AV
25.9792
0
0
0
25.9792
0
0
0
25.9792
⎛⎜⎜⎝
⎞⎟⎟⎠
=
ax AV:= ax
25.9792
0
0
0
25.9792
0
0
0
25.9792
⎛⎜⎜⎝
⎞⎟⎟⎠
=
dx ax1−
:= dx
0.0385
0
0
0
0.0385
0
0
0
0.0385
⎛⎜⎜⎝
⎞⎟⎟⎠
=
bx AV Ztabc⋅:= bx
0.0239 0.1197j+
0
0
0
0.0239 0.1197j+
0
0
0
0.0239 0.1197j+
⎛⎜⎜⎝
⎞⎟⎟⎠
=
cx
0
0
0
0
0
0
0
0
0
⎛⎜⎜⎝
⎞⎟⎟⎠
:=
Ax AV 1−:= Ax
0.0385
0
0
0
0.0385
0
0
0
0.0385
⎛⎜⎜⎝
⎞⎟⎟⎠
=
Bx Ztabc:= Bx
0.0009 0.0046j+
0
0
0
0.0009 0.0046j+
0
0
0
0.0009 0.0046j+
⎛⎜⎜⎝
⎞⎟⎟⎠
=
Input delta connected node 4 load:
kVA41400:= PF41
.9:= Lagging
kVA42500:= PF42
.85:= Lagging
kVA43300:= PF43
.95:= Lagging
SL4ikVA4i
ej acos PF4i( )⋅
⋅:= SL4
360 174.356j+
425 263.3913j+
285 93.675j+
⎛⎜⎜⎝
⎞⎟⎟⎠
=
C:\Milsoft 2009 Evaluation\Student test feeder\Try 2.xmcd 11

Input the three-phase Hp (kVA) and line-to-line voltage rating of the machine
kVA 1200:= VLL 480:= Prot 0:=
Rs 0.0053:= Xs 0.106:= per-unit
Rr 0.007:= Xr 0.12:= per-unit
Xm 4.0:= per-unit
Compute motor impedance in ohms:
ZbaseVLL2
kVA 1000⋅:= Zbase 0.192=
Rs Rs Zbase⋅:= Rs 0.001018= Xs Xs Zbase⋅:= Xs 0.020352=
Rr Rr Zbase⋅:= Rr 0.001344= Xr Xr Zbase⋅:= Xr 0.02304=
Xm Xm Zbase⋅:= Xm 0.768=
Define impedances:
Zs Rs j Xs⋅+:= Zs 0.001 0.0204j+=
Zr Rr j Xr⋅+:= Zr 0.0013 0.023j+=
Ym j−1
Xm⋅:= Ym 1.3021j−=
Zm1
Ym:= Zm 0.768j=
Input the desired slip:
s1 0.005:=
Positive Sequence Network: RL1
1 s1−
s1
⎛⎜⎜⎝
⎞⎟⎟⎠
Rr⋅:= RL1 0.2675=
Negative Sequence Network: s2 2 s1−:= s2 1.995= RL2
1 s2−
s2Rr⋅:= RL2 0.0007−=
ZR1 Zr RL1+:= ZR2 Zr RL2+:=
C:\Milsoft 2009 Evaluation\Student test feeder\Try 2.xmcd 12

Zm 0.768j=ZR1 0.2688 0.023j+= ZR2 0.0007 0.023j+=
ZM1 Zs
Zm ZR1⋅
Zm ZR1++:= ZM1 0.2282 0.1199j+=
ZM2 Zs
Zm ZR2⋅
Zm ZR2++:= ZM2 0.0017 0.0427j+=
Compute phase admittance matrix:
YM11
ZM1:= YM2
1ZM2
:=
YT
1
0
0
0
ts⎯
YM1⋅
0
0
0
ts YM2⋅
⎛⎜⎜⎜⎝
⎞⎟⎟⎟⎠
:=
YMabc As YT⋅ As1−
⋅:= YMabc
3.1318 4.4397j−
1.6856 3.9527j+
3.8174− 0.4869j+
3.8174− 0.4869j+
3.1318 4.4397j−
1.6856 3.9527j+
1.6856 3.9527j+
3.8174− 0.4869j+
3.1318 4.4397j−
⎛⎜⎜⎝
⎞⎟⎟⎠
=
Define source voltages:
nominal phase A-B voltage: ELL 115000 ej 30⋅ deg⋅⋅:=
operating PU voltage: Epu 1.05:=
operating A-B voltage: ELL ELL Epu⋅:= ELL 120750=arg ELL( )
deg30=
Define source voltage array:
ELLABC
ELL
as2 ELL⋅
as ELL⋅
⎛⎜⎜⎜⎝
⎞⎟⎟⎟⎠
:= ELLABCi
120750
120750
120750
=arg ELLABCi( )
deg30
-90
150
=
C:\Milsoft 2009 Evaluation\Student test feeder\Try 2.xmcd 13

ELGABC W ELLABC⋅:= ELGABCi
69715.045
69715.045
69715.045
=arg ELGABCi( )
deg0
-120
120
=
Tol .0000001:=
Istart
0
0
0
⎛⎜⎜⎝
⎞⎟⎟⎠
:=
Iter IS Istart←
IR Istart←
I2 Istart←
I3 Istart←
I4 Istart←
Vold 0 ELGABC⋅←
Told
0
0
0
⎛⎜⎜⎝
⎞⎟⎟⎠
←
VRLG Asub ELGABC⋅ Bsub IR⋅−←
V2LG AR VRLG⋅←
V3LG Aline V2LG⋅ Bline I3⋅−←
V4LG Ax V3LG⋅ Bx I4⋅−←
V4LL D V4LG⋅←
break
1
3
k
V4LLkVoldk
−∑=
Tol<if
Vold V4LL←
IMabc YMabc V4LL⋅←
I3ldi
SL3i1000⋅
V3LGi
⎯
←
I4deli
SL4i1000⋅
V4
⎯
←
i 1 3..∈for
n 1 200..∈for
m 1 3..∈for
:=
C:\Milsoft 2009 Evaluation\Student test feeder\Try 2.xmcd 14

i V4LLi
I4ld DI I4del⋅←
I4 IMabc I4ld+←
It cx V4LG⋅ dx I4⋅+←
I3 It I3ld+←
I2 cline V3LG⋅ dline I3⋅+←
IR dR I2⋅←
IS csub V2LG⋅ dsub I2⋅+←
nm n m⋅←
VcompV2LG
Npt←
IcompI2
CT←
Vrelay Vcomp Zohms Icomp⋅−←
Tpk VlevelkVrelayk
−←
Tapk Toldk round Tpk( )+←
ark 1 .00625 Tapk⋅−←
k 1 3..∈for
AR
1ar1
0
0
0
1ar2
0
0
0
1ar3
⎛⎜⎜⎜⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎟⎟⎟⎠
←
dR AR←
Told Tap←
Out1 1, VRLG←
Out1 2, Vrelay←
Out1 3, Tap←
Out2 1, V2LG←
Out2 2, V3LG←
Out2 3, V4LG←
Out V4←C:\Milsoft 2009 Evaluation\Student test feeder\Try 2.xmcd 15

Out2 4, V4LL←
Out3 1, IS←
Out3 2, IR←
Out3 3, I2←
Out3 4, I3←
Out3 5, I3ld←
Out3 6, It←
Out3 7, I4←
Out3 8, I4ld←
Out3 9, I4del←
Out3 10, IMabc←
Out3 11, Vcomp←
Out3 12, Icomp←
Out4 1, nm←
Out4 2, AR←
Out
C:\Milsoft 2009 Evaluation\Student test feeder\Try 2.xmcd 16

Final ResultsIterations:
Iterationstotal Iter4 1,:= Iterationstotal 39=
Compensator results:
Vcomp Iter3 11,:= Vcompi
131.4111
129.6442
129.0842
=arg Vcompi( )
deg-33.5411
-152.8346
87.954
=
Icomp Iter3 12,:= Icompi
0.0754
0.0621
0.0487
=arg Icompi( )
deg-56.1665
-176.3531
57.5493
=
Vrelay Iter1 2,:= Vrelayi
125.2262
124.4575
124.5935
=arg Vrelayi( )
deg-36.0745
-154.8971
86.5765
=
Final tap settings:
Tap Iter1 3,:= Tap
12
10
8
⎛⎜⎜⎝
⎞⎟⎟⎠
=
Final Regulator matrices:
AR Iter4 2,:= AR
1.0811
0
0
0
1.0667
0
0
0
1.0526
⎛⎜⎜⎝
⎞⎟⎟⎠
=
dR AR:= dR
1.0811
0
0
0
1.0667
0
0
0
1.0526
⎛⎜⎜⎝
⎞⎟⎟⎠
=
C:\Milsoft 2009 Evaluation\Student test feeder\Try 2.xmcd 17

Node Voltages: 120 Volt Base
VRLG Iter1 1,:= VRLGi
7293.3183
7341.1016
7357.8005
=arg VRLGi( )
deg-33.5411
-152.8346
87.954
=VRLGi
Npt
121.5553
122.3517
122.63
=
V2LG Iter2 1,:= V2LGi
7884.6685
7778.6507
7745.0531
=arg V2LGi( )
deg-33.5411
-152.8346
87.954
=V2LGi
Npt
131.4111
129.6442
129.0842
=
V3LG Iter2 2,:= V3LGi
7341.6238
7611.8194
7484.1398
=arg V3LGi( )
deg-36.5216
-155.3708
87.1687
=V3LGi
Npt
122.3604
126.8637
124.7357
=
Motor transformer CT ratios:
NLNpt
480
3
120:= NLNpt 2.3094= NLLpt
480120
:= NLLpt 4=
Motor node voltages:
V4LG Iter2 3,:= V4LGi
276.3107
285.3829
279.6403
=arg V4LGi( )
deg-38.3838
-157.3778
85.5233
=V4LGi
NLNpt
119.646
123.5744
121.0878
=
C:\Milsoft 2009 Evaluation\Student test feeder\Try 2.xmcd 18

V4LL Iter2 4,:= V4LLi
483.9787
482.0254
490.6663
=arg V4LLi( )
deg-7.3357
-126.2834
113.3869
=V4LLi
NLLpt
120.9947
120.5063
122.6666
=
Line currents:
IS Iter3 1,:= ISi
37.3522
30.9828
32.8437
=arg ISi( )
deg-29.4378
-152.9058
98.6629
=
IR Iter3 2,:= IRi
407.3344
328.9488
256.5368
=arg IRi( )
deg-56.1665
-176.3531
57.5493
=
I2 Iter3 3,:= I2i
376.7843
310.4454
243.71
=arg I2i( )
deg-56.1665
-176.3531
57.5493
=
I3 Iter3 4,:= I3i
376.8376
310.4806
243.7526
=arg I3i( )
deg-56.1807
-176.3733
57.5288
=
It Iter3 6,:= Iti
90.4713
103.7945
96.121
=arg Iti( )
deg-60.8263
178.0088
51.6566
=
I4 Iter3 7,:= I4i
2350.3688
2696.4947
2497 1423
=arg I4i( )
deg-60.8263
178.0088
51 6566
=
C:\Milsoft 2009 Evaluation\Student test feeder\Try 2.xmcd 19

2497.1423 51.6566
Load currents:
I3ld Iter3 5,:= I3ldi
286.7572
207.4336
148.4621
=arg I3ldi( )
deg-54.7165
-173.5657
61.3268
=
I4ld Iter3 8,:= I4ldi
1297.7829
1655.2656
1347.2413
=arg I4i( )
deg-60.8263
178.0088
51.6566
=
I4del Iter3 9,:= I4deli
826.4827
1037.2898
611.4134
=arg I4deli( )
deg-33.1776
-158.0718
95.1921
=
IMabc Iter3 10,:= IMabci
1068.1972
1041.272
1156.8943
=arg IMabci( )
deg-68.0882
178.4162
56.2792
=
C:\Milsoft 2009 Evaluation\Student test feeder\Try 2.xmcd 20

Compute motor operating complex power:
V4LG W V4LL⋅:=
SMi
V4LGiIMabci
⎯
1000:= SM
258.8482 154.8569j+
262.382 120.7152j+
288.4544 150.5724j+
⎛⎜⎜⎝
⎞⎟⎟⎠
=
PFi
Re SMi( )SMi
:= PF
0.8582
0.9085
0.8865
⎛⎜⎜⎝
⎞⎟⎟⎠
=
SMtotal
1
3
k
SMk∑=
:= SMtotal 809.6846 426.1445j+=
SMtotal 914.9799=
PFtotalRe SMtotal( )
SMtotal:= PFtotal 0.8849=
Compute complex power out of motor transformer:
STi
V4LGiI4i
⎯⋅
1000:= ST
608.0488 266.0076j+
677.229 317.4288j+
594.4067 374.1303j+
⎛⎜⎜⎝
⎞⎟⎟⎠
=
STtotal
1
3
k
STk∑=
:= STtotal 1879.6846 957.5667j+=
STtotal 2109.5374=
C:\Milsoft 2009 Evaluation\Student test feeder\Try 2.xmcd 21

Short Circuit Calculations for Faults at Node 4
Determine Thevenin Equivalent Z of the system relative to the 12.47 side of the transformer..
Zlosys Asub Zsysabc⋅ dsub⋅ Bsub+:=
Zlosys
0.1737 1.5107j+
0.0221− 0.1074j−
0.0221− 0.1074j−
0.0221− 0.1074j−
0.1737 1.5107j+
0.0221− 0.1074j−
0.0221− 0.1074j−
0.0221− 0.1074j−
0.1737 1.5107j+
⎛⎜⎜⎝
⎞⎟⎟⎠
=
Calculate equivalent impedance up to node 2:
Zth2 Zlosys Zsub+:=
Zth2
0.3033 2.8065j+
0.1075 1.1884j+
0.1075 1.1884j+
0.1075 1.1884j+
0.3033 2.8065j+
0.1075 1.1884j+
0.1075 1.1884j+
0.1075 1.1884j+
0.3033 2.8065j+
⎛⎜⎜⎝
⎞⎟⎟⎠
=
Compute Thevenin voltage at node 2:
Eth2 AsubELGABC
Epu⋅:= Eth2i
7199.5579
7199.5579
7199.5579
= arg Eth2i( )deg-30
-150
90
=
Calculate Thevenin equivalent impedance to node 3:
Zth3 Zth2 Zabc+:=
Zth3
1.2184 4.9626j+
0.4194 2.1918j+
0.4145 1.9583j+
0.4194 2.1918j+
1.2365 4.9029j+
0.4235 2.0357j+
0.4145 1.9583j+
0.4235 2.0357j+
1.2262 4.9366j+
⎛⎜⎜⎝
⎞⎟⎟⎠
=
Compute Thevenin voltage at node 3:
Eth3 Aline Eth2⋅:= Eth3i
7199.6249
7199.615
7199.6193
=arg Eth3i( )
deg-30.0002
-150.0003
89.9998
=
C:\Milsoft 2009 Evaluation\Student test feeder\Try 2.xmcd 22

Calculate Thevenin equivalent impedance to node4:
Zth4 Ax Zth3⋅ dx⋅ Bx+:=
Zth4
0.0027 0.012j+
0.0006 0.0032j+
0.0006 0.0029j+
0.0006 0.0032j+
0.0028 0.0119j+
0.0006 0.003j+
0.0006 0.0029j+
0.0006 0.003j+
0.0027 0.0119j+
⎛⎜⎜⎝
⎞⎟⎟⎠
=
Calculate Thevenin equivalent voltage at node 4:
Eth4 Ax Eth3⋅:= Eth4i
277.1307
277.1303
277.1305
=arg Eth4i( )
deg-30.0002
-150.0003
89.9998
=
Compute equivalent admittance matrix:
Y Zth41−
:= Y
20.7927 88.695j−
5.4835− 19.6812j+
3.9269− 16.4868j+
5.4835− 19.6812j+
21.4616 89.6582j−
4.4587− 17.7159j+
3.9269− 16.4868j+
4.4587− 17.7159j+
20.5351 88.09j−
⎛⎜⎜⎝
⎞⎟⎟⎠
=
Compute constant current matrix
IPabc Y Eth4⋅:= IPabci
30249.8889
31040.9507
30004.7781
=arg IPabci( )
deg-104.993
132.7553
12.6243
=
Compute sum of row terms:
IMi =IMYsi1
3
k
Yi k,∑=
:= Ys
11.3824 52.527j−
11.5194 52.2611j−
12.1495 53.8874j−
⎛⎜⎜⎝
⎞⎟⎟⎠
=
C:\Milsoft 2009 Evaluation\Student test feeder\Try 2.xmcd 23

Define source vector:
IPs
IPabc1
IPabc2
IPabc3
0
0
0
0
⎛⎜⎜⎜⎜⎜⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎟⎟⎟⎟⎟⎠
:=
Define coefficient matrix for three-phase fault:
C
1
0
0
0
0
0
1
0
1
0
0
0
0
1
0
0
1
0
0
0
1
Y1 1,
Y2 1,
Y3 1,
1
0
0
0
Y1 2,
Y2 2,
Y3 2,
0
1
0
0
Y1 3,
Y2 3,
Y3 3,
0
0
1
0
Ys1
Ys2
Ys3
0
0
0
0
⎛⎜⎜⎜⎜⎜⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎟⎟⎟⎟⎟⎠
:=
Solve Equation:
X C 1− IPs⋅:=
Define primary currents:
Ifabc4iXi:=
Display short circuit currents for a-b-c fault at node 4:
Ifabc4i
30323.7013
31095.0381
29868.831
=arg Ifabc4i( )
deg-105.2026
132.9785
12.5949
=
Ifabcline dx Ifabc4⋅:= Ifabclinei
1167.2315
1196.9221
1149.7224
=arg Ifabclinei( )
deg-105.2026
132.9785
12.5949
=
C:\Milsoft 2009 Evaluation\Student test feeder\Try 2.xmcd 24

Ifabcsource dsub Ifabcline⋅:= Ifabcsourcei
129.3399
127.4826
124.2033
=arg Ifabcsourcei( )
deg-75.7117
162.1265
43.9574
=
Define coefficient matrix for a-b fault at node 4:
C
1
0
0
0
0
1
0
0
1
0
0
0
1
0
0
0
1
0
0
0
1
Y1 1,
Y2 1,
Y3 1,
1
0
0
0
Y1 2,
Y2 2,
Y3 2,
0
1
0
0
Y1 3,
Y2 3,
Y3 3,
0
0
0
0
Ys1
Ys2
Ys3
0
0
0
0
⎛⎜⎜⎜⎜⎜⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎟⎟⎟⎟⎟⎠
:=
SolveEquation:
X C 1− IPs⋅:=
Define primarycurrents:
Ifab4iXi:=
Display primary short circuitcurrents:
Ifab4i
26892.9605
26892.9605
0
=arg Ifab41( )
deg76.266−=
Ifabline dx Ifab4⋅:= Ifablinei
1035.1741
1035.1741
0
=arg Ifabline1( )
deg76.266−=
C:\Milsoft 2009 Evaluation\Student test feeder\Try 2.xmcd 25

Ifabsource dsub Ifabline⋅:= Ifabsourcei
129.6138
64.8069
64.8069
=arg Ifabsourcei( )
deg-76.266
103.734
103.734
=
Define coefficient matrix for b-c fault at node 4:
C
1
0
0
0
0
1
0
0
1
0
0
0
0
1
0
0
1
0
0
0
1
Y1 1,
Y2 1,
Y3 1,
0
0
0
0
Y1 2,
Y2 2,
Y3 2,
1
0
0
0
Y1 3,
Y2 3,
Y3 3,
0
1
0
0
Ys1
Ys2
Ys3
0
0
0
0
⎛⎜⎜⎜⎜⎜⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎟⎟⎟⎟⎟⎠
:=
SolveEquation:
X C 1− IPs⋅:=
Define primarycurrents:
Ifbc4iXi:=
Display primary short circuitcurrents:
Ifbc4i
0
26286.1799
26286.1799
=arg Ifbc42( )
deg163.4164=
Ifbcline dx Ifbc4⋅:= Ifbclinei
0
1011.8177
1011.8177
=arg Ifbcline2( )
deg163.4164=
Ifbcsource dsub Ifbcline⋅:= Ifbcsourcei
63.3447
126.6894
63 3447
=arg Ifbcsourcei( )
deg-16.5836
163.4164
-16 5836
=
C:\Milsoft 2009 Evaluation\Student test feeder\Try 2.xmcd 26

63.3447 16.5836
Define Coefficient matrix for c-a fault at node 4:
C
1
0
0
0
0
0
1
0
1
0
0
0
1
0
0
0
1
0
0
0
1
Y1 1,
Y2 1,
Y3 1,
1
0
0
0
Y1 2,
Y2 2,
Y3 2,
0
0
0
0
Y1 3,
Y2 3,
Y3 3,
0
1
0
0
Ys1
Ys2
Ys3
0
0
0
0
⎛⎜⎜⎜⎜⎜⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎟⎟⎟⎟⎟⎠
:=
Solve Equation:
X C 1− IPs⋅:=
Define primary currents:
Ifca4iXi:=
Display short circuit currents:
Ifca4i
25848.2264
0
25848.2264
=arg Ifca41( )
deg136.8115−=
Ifcaline dx Ifca4⋅:= Ifcalinei
994.9598
0
994.9598
=arg Ifcaline1( )
deg136.8115−=
Ifcasource dsub Ifcaline⋅:= Ifcasourcei
62.2893
62.2893
124.5786
=arg Ifcasourcei( )
deg-136.8115
-136.8115
43.1885
=
C:\Milsoft 2009 Evaluation\Student test feeder\Try 2.xmcd 27

Define coefficient matrix for a-g fault at node 4:
C
1
0
0
0
0
0
0
0
1
0
0
0
1
0
0
0
1
0
0
0
1
Y1 1,
Y2 1,
Y3 1,
1
0
0
0
Y1 2,
Y2 2,
Y3 2,
0
0
0
0
Y1 3,
Y2 3,
Y3 3,
0
0
0
0
Ys1
Ys2
Ys3
0
1
0
0
⎛⎜⎜⎜⎜⎜⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎟⎟⎟⎟⎟⎠
:=
SolveEquation:
X C 1− IPs⋅:=
Define primarycurrents:
Ifag4iXi:=
Display primary short circuitcurrents:
Ifag4i
22590.118
0
0
=arg Ifag41( )
deg107.1576−=
Ifagline dx Ifag4⋅:= Ifaglinei
869.5474
0
0
=arg Ifagline1( )
deg107.1576−=
Ifagsource dsub Ifagline⋅:= Ifagsourcei
54.4379
0
54.4379
=arg Ifagsource1( )
deg107.1576−=
C:\Milsoft 2009 Evaluation\Student test feeder\Try 2.xmcd 28

Define coefficient matrix for b-g fault at node 4:
C
1
0
0
0
0
1
0
0
1
0
0
0
0
0
0
0
1
0
0
0
1
Y1 1,
Y2 1,
Y3 1,
0
0
0
0
Y1 2,
Y2 2,
Y3 2,
1
0
0
0
Y1 3,
Y2 3,
Y3 3,
0
0
0
0
Ys1
Ys2
Ys3
0
1
0
0
⎛⎜⎜⎜⎜⎜⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎟⎟⎟⎟⎟⎠
:=
SolveEquation:
X C 1− IPs⋅:=
Define primarycurrents:
Ifbg4iXi:=
Display primary short circuitcurrents:
Ifbg4i
0
22738.8125
0
=arg Ifbg42( )
deg133.0582=
Ifbgline dx Ifbg4⋅:= Ifbglinei
0
875.271
0
=arg Ifbgline2( )
deg133.0582=
Ifbgsource dsub Ifbgline⋅:= Ifbgsourcei
54.7962
54.7962
0
=arg Ifbgsource1( )
deg46.9418−=
C:\Milsoft 2009 Evaluation\Student test feeder\Try 2.xmcd 29

Define Coefficient matrix for c-g fault at node 4:
C
1
0
0
0
0
1
0
0
1
0
0
0
0
1
0
0
1
0
0
0
0
Y1 1,
Y2 1,
Y3 1,
0
0
0
0
Y1 2,
Y2 2,
Y3 2,
0
0
0
0
Y1 3,
Y2 3,
Y3 3,
1
0
0
0
Ys1
Ys2
Ys3
0
1
0
0
⎛⎜⎜⎜⎜⎜⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎟⎟⎟⎟⎟⎠
:=
Solve Equation:
X C 1− IPs⋅:=
Define primary currents:
Ifcg4iXi:=
Display short circuit currents:
Ifcg4i
0
0
22654.536
=arg Ifcg43( )
deg12.9355=
Ifcgline dx Ifcg4⋅:= Ifcglinei
0
0
872.027
=arg Ifcgline3( )
deg12.9355=
Ifcgsource dsub Ifcgline⋅:= Ifcgsourcei
0
54.5931
54.5931
=arg Ifcgsource2( )
deg167.0645−=
C:\Milsoft 2009 Evaluation\Student test feeder\Try 2.xmcd 30

Summary of Short Circuit Currents
Motor transformer output currents for faults at node4:
Ifabc4i
30323.7013
31095.0381
29868.831
= Ifab4i
26892.9605
26892.9605
0
= Ifbc4i
0
26286.1799
26286.1799
= Ifca4i
25848.2264
0
25848.2264
=
Ifag4i
22590.118
0
0
= Ifbg4i
0
22738.8125
0
= Ifcg4i
0
0
22654.536
=
Line currents for faults at node 4:
Ifabclinei
1167.2315
1196.9221
1149.7224
= Ifablinei
1035.1741
1035.1741
0
= Ifbclinei
0
1011.8177
1011.8177
= Ifcalinei
994.9598
0
994.9598
=
Ifaglinei
869.5474
0
0
= Ifbglinei
0
875.271
0
= Ifcglinei
0
0
872.027
=
Source currents for faults at node 4:
Ifabcsourcei
129.3399
127.4826
124.2033
= Ifabsourcei
129.6138
64.8069
64.8069
= Ifbcsourcei
63.3447
126.6894
63.3447
= Ifcasourcei
62.2893
62.2893
124.5786
=
Ifagsourcei
54.4379
0
54.4379
= Ifbgsourcei
54.7962
54.7962
0
= Ifcgsourcei
0
54.5931
54 5931
=
C:\Milsoft 2009 Evaluation\Student test feeder\Try 2.xmcd 31

54.5931
C:\Milsoft 2009 Evaluation\Student test feeder\Try 2.xmcd 32