mars rover project d. h. schwartz o. a. martinez k. r. lewelling (pi) university of arkansas –...
TRANSCRIPT

Mars Rover Project
D. H. SchwartzO. A. MartinezK. R. Lewelling (PI)University of Arkansas – Fort Smith

Rover chassis built by Harding University



+/- 15 V Power Supplies
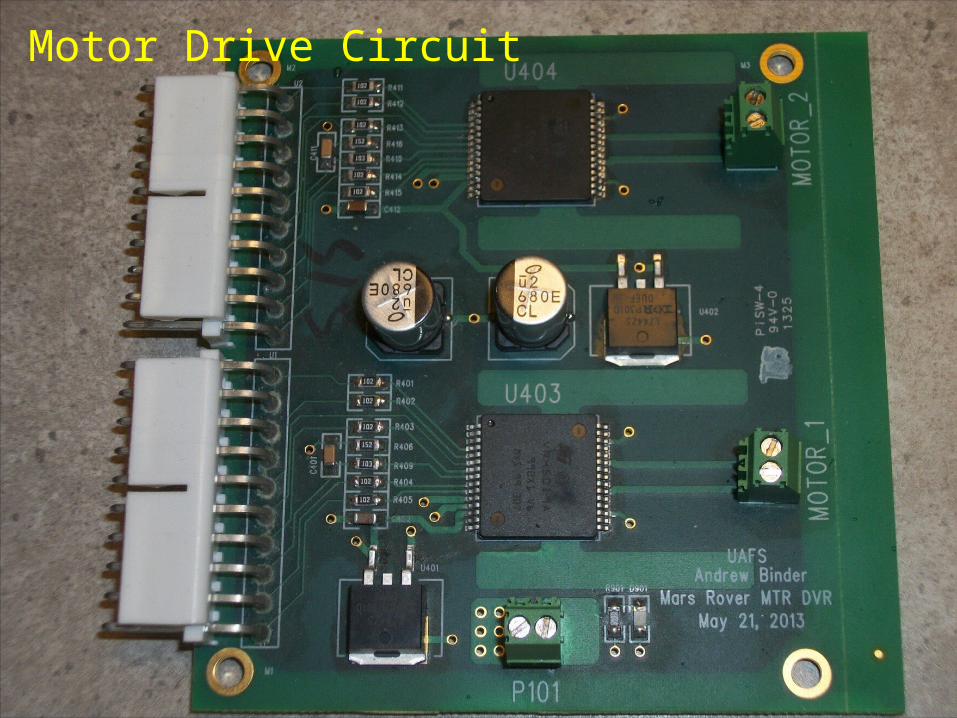
Motor Drive Circuit

/*Code to DEMO ROVER
SIGNAL AND PORT CONNECTIONS:PT7 PT6 PT5 PT4 PT3 PT2 PT1 PT0PB7 PB6 PB5 PB4 PB3 PB2 PB1 PB0 | | | | | | | |GND 5V CS CSDIS ENB INB INA ENA*/#include <hidef.h> /* common defines and macros */#include <mc68hc912d60.h> /* derivative information */#include <stdlib.h>
int x;int y;int z;void main(void);void MSDelay(unsigned int itime);void Forward(unsigned int DTY);void Reverse(unsigned int DTY);void TurnRight(void);void TurnLeft(void);void Brake(unsigned int DTY1, unsigned int DTY3);void Stop(void);
Rover Code
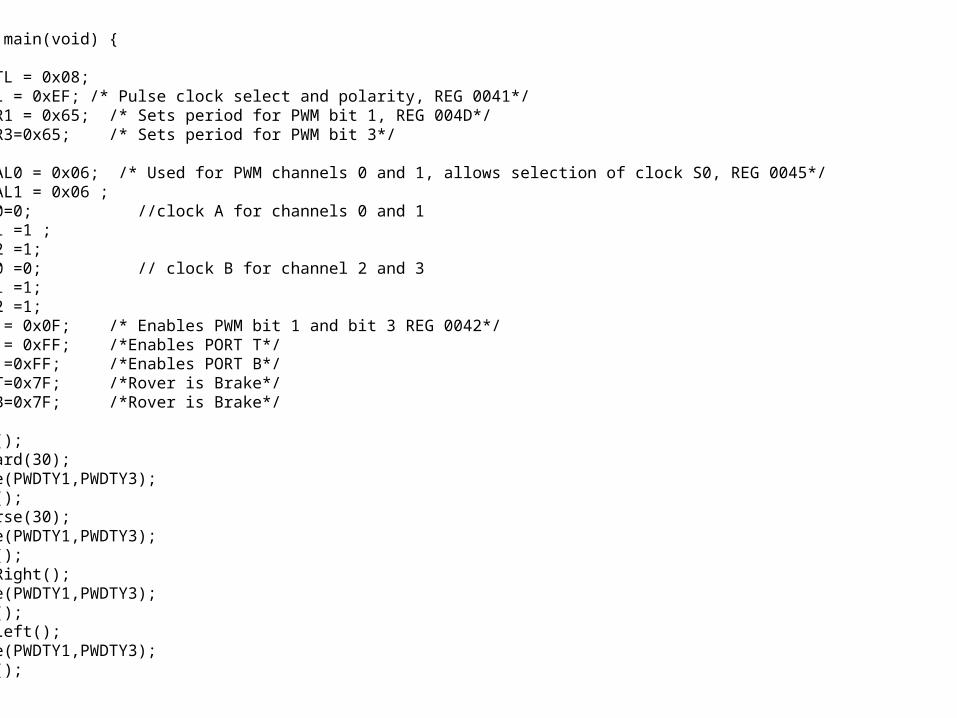
void main(void) { COPCTL = 0x08;PWPOL = 0xEF; /* Pulse clock select and polarity, REG 0041*/PWPER1 = 0x65; /* Sets period for PWM bit 1, REG 004D*/PWPER3=0x65; /* Sets period for PWM bit 3*/ PWSCAL0 = 0x06; /* Used for PWM channels 0 and 1, allows selection of clock S0, REG 0045*/PWSCAL1 = 0x06 ;PCKA0=0; //clock A for channels 0 and 1PCKA1 =1 ;PCKA2 =1;PCKB0 =0; // clock B for channel 2 and 3PCKB1 =1; PCKB2 =1;PWEN = 0x0F; /* Enables PWM bit 1 and bit 3 REG 0042*/ DDRT = 0xFF; /*Enables PORT T*/DDRB =0xFF; /*Enables PORT B*/PORTT=0x7F; /*Rover is Brake*/PORTB=0x7F; /*Rover is Brake*/
Stop();Forward(30);Brake(PWDTY1,PWDTY3);Stop();Reverse(30);Brake(PWDTY1,PWDTY3);Stop();TurnRight();Brake(PWDTY1,PWDTY3);Stop();TurnLeft(); Brake(PWDTY1,PWDTY3);Stop();

Rover with New Arm

Rover Lower and Upper ArmLower Arm
Upper Arm



Rover Arm Fully Extended


Next Steps
• Mount arm on rover• Develop gripping mechanism• Develop drilling attachment• Add machine vision (MV)• Program autonomous guidance using MV• Add IR spectrometer
Acknowledgements
• NASA• Arkansas Space Grant Consortium • Ken Gibson – ABB Baldor • Kevin Lewelling – University of Arkansas Ft. Smith• Osman Martinez –University of Arkansas Ft. Smith• Edmond Wilson – Harding University• University of Arkansas Fort Smith• Harding University