lecture 12: lidarand aerial image
TRANSCRIPT

Lecture 12: LiDAR and aerial image
Yuji Kuwano, Lead ALS Support Engineer
Leica Geosystems AG
Please insert a picture
(Insert, Picture, from file).
Size according to grey field
(10 cm x 25.4 cm).
Scale picture: highlight, pull corner point
Cut picture: highlight, choose the cutting icon from the picture tool bar, click on a
side point and cut

2
Presentation outline
Introduction to digital frame camera workflow
Demonstration of camera boresight workflow
Demonstration of orthophoto workflow with case study
Summary

3
RCD105 Digital Frame Camera for ALS50-II
39 MP: flexible and fast
Certified airborne design
High shutter speed (1/4000 sec), high frame rate (2.02 seconds/frame)
3 lenses to choose from (35, 60, 100 mm) with RGB or CIR
Up to 2 camera heads per controller

4
RCD105 Camera System
product configuration
CH39 Camera Head (39 MP)
Lens (35, 60 or 100 mm)
CC105 Camera Controller (shown
mounted to SC50System Controller)
Isolated Interface Plate Assembly (Mi-8
version shown)

5
RCD105 integration with ALS50-II
(green indicates RCD105 components)
AUX1 Hybrid
AUX1 LAN
SC50
Hybrid
LAN
CC105 Camera
Controller
SDR-26
CH39 Camera Head
Lens
(35, 60
or 100
mm)
RGB FilterShutte
r
Optional CIR
Filter and
Compensating
Optic
�28 VDC
Mid-exposure pulse (TTL) ����
�Real-time nav solution (GPS time,
position, orientation)
Trigger, pixel
data, serial
camera control
or
12 VDC, mid-
exposure
pulse
Lemo
SDR-26 Lemo

6
Camera workflow overview
in context of LIDAR workflow
FPES
Mission
Planningmode
altitude
scan rate
FOV
flight speed
flight lines
flight height
lens FL
shutter speed
frame rate
record DGPS base
station data
Airborne
Operationsrecord position and attitude data
•GPS
•IMU
•event marks
record scanner data
•range
•scan angle
•intensity
•timing info
record camera data
•photo ID file
•raw frames
extract
position
and
attitude
data
DGPS
processing
trajectory
processing
•point cloud generation
•output formatting – LDI, LAS, ASCII
•projection - WGS 84, UTM, state plane, Swiss, TW 97, user-supplied
•datum (state plane only) - NGVD 29, NAVD 88
•tiling
•coverage verification
•outlier removal
•bare earth
•thinning
•catenary generation
deliverables
Ground
Operations
Planning Collection Processing
real-time nav file
*.SCN raw scanner files
ALS50, FCMS, CamGUI
GrafNav IPAS Pro
ALS50 Post Processor
position and
attitude file
GPS1200
TerraScan
IPAS Pro
Micro
Statio
n
•TIN/contour
•control report
TerraModeller
laser boresite
calibration
Attune
calculate
exterior
orientations
EO fileIPAS CO
camera
boresight,
orthophoto
generation
LPS
“LAS” file
orthophotos
Bayer
conversion
CDPP

7
Mission planning objectives
coordinating sensor and aircraft parameters
Determine camera settings
� Determine ground sample distance
� Select lens and flying height
� Determine coverage
� Select forward overlap
� Determine shutter speed
Determine flight line layout
� Line-to-line spacing
� Photo centers

8
Camera and ALS mission plan using FPES
optimized planning for GSD & photo centers

9
Camera boresight flight plan
2 flight levels and directions required for boresight
Can perform without ground control
Recommended calibration configuration (60 mm lens example)
� Mission area
� Roughly 3km x 2.5km
� Overlap / sidelap
� 60% forward, 40% sidelap
� 15 cm GSD @ 1350 m AGL
� 4 Parallel lines / opposed flight direction
� 12 Images per lines
� 25 cm GSD @ 2300 m AGL
� 2 cross lines / opposed flight direction
� 6 Images per lines
� Ground Control Point (Recommended)
� Locate 4 corners and center,3 alternatives for each area
� Accuracy check as check point
Ground Control Point

10
Camera vs. altitude parameters
achieving correct pixel size and area coverage
3670
2300
1280
Altitude
AGL
(m)
2200
1350
770
Altitude
AGL
(m)
Higher Altitude
Along track x
Cross track
for 15cm lines
(km x km)
GSD
(m)
GSD
(m)
3.5 x 2.80.250.15100
3.0 x 2.50.250.1560
3.5 x 3.00.250.1535
Estimated
Calibration
Area
Coverage
Lower Altitude
Focal
Length
(mm)

11
Camera boresight
IPAS CO Setup

12
Camera boresight
IPAS CO Initial EO ‘Seeded.dat’
File structure : EventID , ImageID , X , Y , Z , O , P , K

13
Set up LPS project
define coordinate system, projection and datum

14
Set up LPS project
create a camera file ( Use Balanced parameter )
� Use supplied K01,K1,K2 coefficient

15
Set up LPS project
import Initial EO information

16
Set up LPS project
initial mage location

17
LSP project
check initial misalignment quality using ViewPlex

18
LPS project
automatic tie point measurement

19
LPS project
triangulation properties – “General” tab

20
LPS project
triangulation properties – “Point” tab

21
LPS project
triangulation properties – “Exterior” tab

22
LPS project
triangulation properties – “Advanced Options” tab

23
LPS project
triangulation summary

24
LPS project
manual blunder rejection (as needed)

25
LPS project
triangulation report
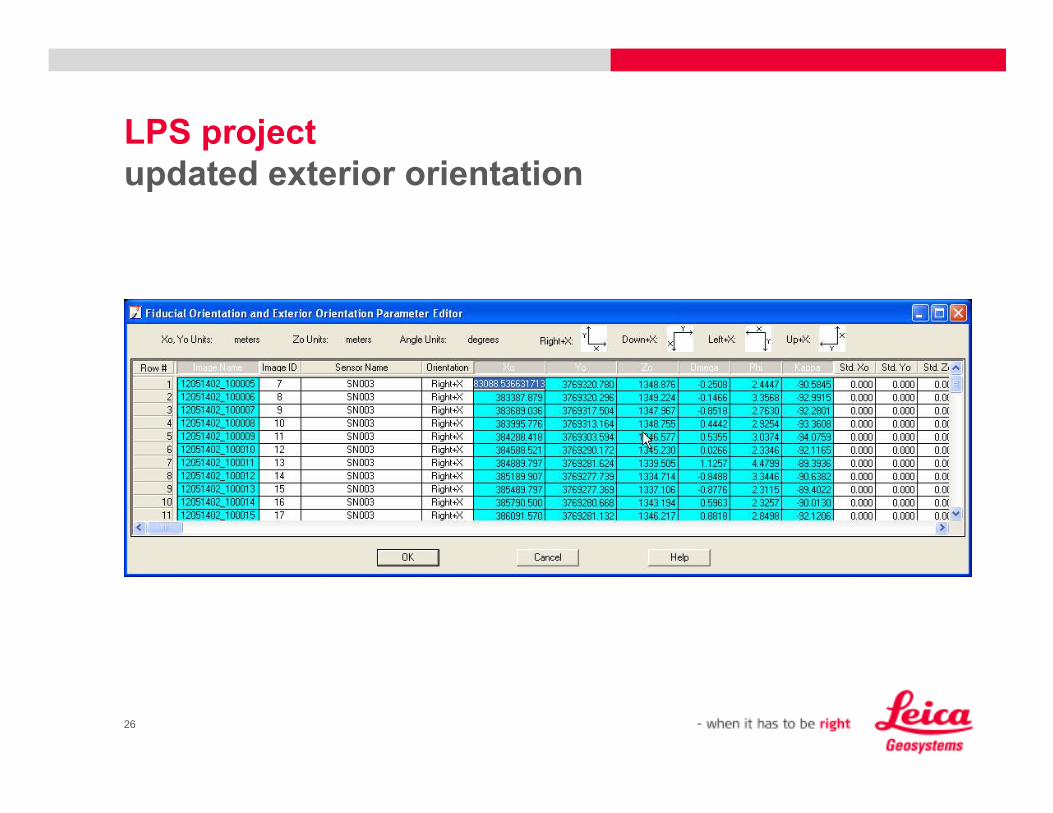
26
LPS project
updated exterior orientation

27
Camera boresight
IPAS CO “Compute Camera Misalignment” setup

28
Camera boresight
IPAS CO “Camera Misalignment Results” window

29
Direct georeferencing
IPAS CO setup

30
Direct referencing
IPAS CO final EO

31
LSP project
check final misalignment quality using ViewPlex

32
Case Study 1…higher productivity with MPiA
42.5 HzScan rate
45 degreesFOV
150 kHz
(MPiA)Pulse rate
LIDAR
parameters
100 knotsAircraft speed
Aircraft
parameters
Cross-track
post spacing
(worst case)
Along-track
post spacing
(worst case)
Flying height
0.91 m
1.21 m
1300 m AGL
Palos Verdes

33
Case Study 1…higher productivity with MPiA
42.5 HzScan rate
45 degreesFOV
150kHz
(MPiA)Pulse rate
LIDAR
parameters
100 knotsAircraft speed
Aircraft
parameters
Cross-track
post spacing
(worst case)
Along-track
post spacing
(worst case)
Flying height
1.21 m
0.91 m
1300 m AGL
42.5 HzScan rate
45 degreesFOV
104kHz
(SPiA)Pulse rate
LIDAR
parameters
100 knotsAircraft speed
Aircraft
parameters
Cross-track
post spacing
(worst case)
Along-track
post spacing
(worst case)
Flying height
1.21 m
0.92 m
910 m AGL
ALS50/SPiA ModeALS50/MPiA Mode

34
Case Study 1…bare earth surface generation
sample small section
1 flight line
1.0km x 1.6 km covered
Total of 2 523 721 points
Multiple returns
Image features all LIDAR points
colored by elevation

35
Case Study 1…filtering of laser surface
ground surface model (DTM) is now created
Step 1. Classify “Ground’ Model for bare earth classification
(1 385 128 points to the ground)

36
Case Study 1…filtering of laser surface…cont
ground surface model (DTM) is now created
Step 2. Thin ground surface using “model key points” routine
Ground surface is now defined by 139 756 points

37
Case Study 1…form photogrammetric block
Sample 1 strip of 4 images
Each strip has with 60% forward overlap
Nominal GSD size 15cm
Camera fixed to LIDAR scanner platform; therefore no drift
compensation available for the camera
Format size 7162 (cross track) x 5389 (along track)

38
Case Study 1…direct georeferencing
IPAS CO using same misalignment from calibration

39
Case Study 1…ortho production
setup LPS project / import direct georeference data

40
Case Study 1…ortho production
exterior orientation is fixed

41
Case Study 1…ortho production
check stereo pair quality (paralax) using ViewPlex

42
Case Study 1…importing the LIDAR DTM
direct LAS file import facilitates orthorectification
A terrain model is required to generate orthophotos
The model key point surface can be imported directly in LIDAR
native LAS file format
A gridded DTM is generated at 2m interval (i.e., greater than the
LIDAR post spacing)

43
Case Study 1…LPS surface import setup

44
Case Study 1…view of output gridded DTM

45
Case Study 1…LPS orthophoto resampling setup

46
Case Study 1…0.15 m orthophoto generation with ALS50
includes surface, EO information, camera model, images

47
Case Study 1…0.15 m orthophoto generation with ALS50
individual ortho has good match with ALS DTM

48
Case Study 1…LPS ortho mosaic setup

49
Case Study 1…LPS ortho mosaic
(before color dodging)

50
RCD105 Digital Frame Camera for ALS50-II
rugged design for precise imagery

51
Case Study 2…urban project
ortho with bare earth DTM vs dense LIDAR DSM
0.42 mCross-track post spacing (worst case)
52.2 HzScan rate
30 degreesFOV
124kHz (SPiA)Pulse rate
LIDAR parameters
100 knotsAircraft speed
Aircraft parameters
Average Point Density (@ Nadir)
Along-track post spacing (worst case)
Flying height
4.31 pts/m^2
0.99 m
710 m AGL

52
Case Study 2…urban project
52.2 HzScan rate
30
degreesFOV
130 kHz
(SPiA)Pulse rate
LIDAR
param
eters
100
knots
Aircraft
speed
Aircra
ft
param
eters
Cross-track
post spacing
(worst case)
Along-track
post spacing
(worst case)
Flying height
0.42m
0.99m
710 m
AGL
Palos Verdes

53
Case Study 2…LIDAR surface generation (bare earth / DSM)
small sample area
2 flight lines
0.8km x 0.6 km covered
Total of 3 774 070 points
Multiple returns
Image features all LIDAR
points colored by elevation

54
Case Study 2…bare earth extraction
ground surface model (DTM) is now created
Step 1. Classify “Ground’ Model for bare earth classification
(978 030 points to the ground)
Step2.Classify ‘Model Key Point’ to LAS file(47 972 points)

55
Case Study 2…DSM extraction
Step 1. Classify ‘Any First return’ points(3 708 569 points)
Step 2. Export Any of First to LAS file as DSM

56
Case Study 2…form photogrammetric block
Sample 1 strip of 4 images
Each strip has with 60% forward overlap
Nominal GSD size 8 cm
Camera fixed to LIDAR scanner platform; therefore no drift
compensation available for the camera

57
Case Study 2…direct georeferencing
IPAS CO setup…same misalignment from calibration

58
Case Study 2…ortho production
exterior orientation is fixed

59
Case Study 2…ortho production
check stereo pair quality by ViewPlex

60
Case Study 2…importing the LIDAR DTM
direct LAS file import facilitates orthorectification
Create 2 sets of DTM for comparison
A) Bare Earth DTM as conventional Ortho workflow
-Import by 2m Gridded DEM
B) DSM as True Ortho aiding
-Import by original point spacing(=0.45m point spacing) DEM

61
Case Study 2…view of gridded bare earth DTM

62
Case Study 2…view of gridded DSM
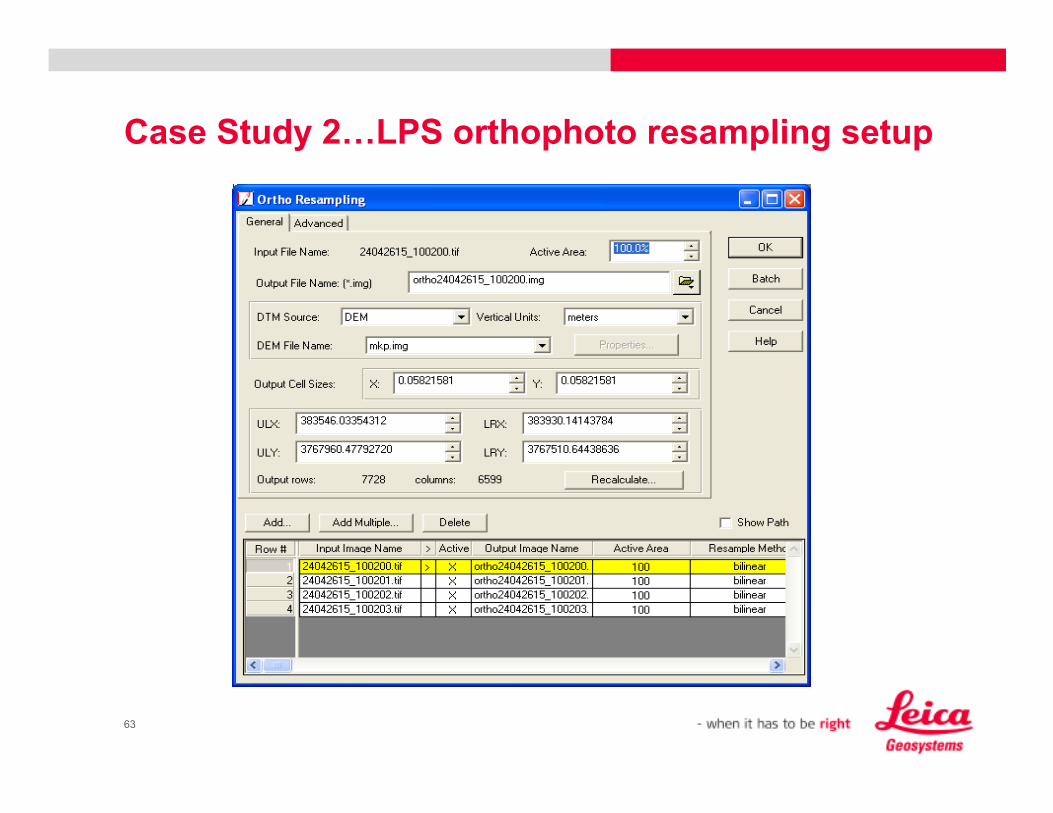
63
Case Study 2…LPS orthophoto resampling setup

64
Case Study 2…8 cm GSD orthophoto with bare earth
individual ortho images

65
Case Study 2…8 cm GSD orthophoto with bare
earth
Bare earth DTM provides very good
ortho matching
Note building lean in images due to
off-nadir angle

66
Case Study 2…8 cm GSD orthophoto with DSM
individual ortho images

67
Case Study 2…8 cm GSD orthophoto with DSM
DSM ortho minimizes number of buildings needing
vectorization

68
Case Study 2…bare earth ortho vs DSM ortho
Bare Earth Ortho Dense DSM Ortho

69
Conclusions
IPAS CO and LPS Core/ORIMA can be used to determine camera
boresight and compute direct exterior orientation for images
Orthophoto workflow is well integrated with LIDAR workflow
LPS software is well-suited to the task of handling LIDAR data for
orthorectification
High density ALS data aids generation of true ortho product

70
Thank you
questions?
Leica Geosystems AG
Heinrich-Wild-Strasse
CH-9435 Heerbrugg ,Switzerland
Tell+41 71 727 4262
Fax+41 71 727 4674