learning to help human problem solvers - nasa · learning to help human problem solvers karen myers...
TRANSCRIPT
© 2017 SRI International
LearningtoHelpHumanProblemSolvers
KarenMyersAICenter,SRIInternational
NASAAmesMachineLearningWorkshop– August,2017
© 2017 SRI International
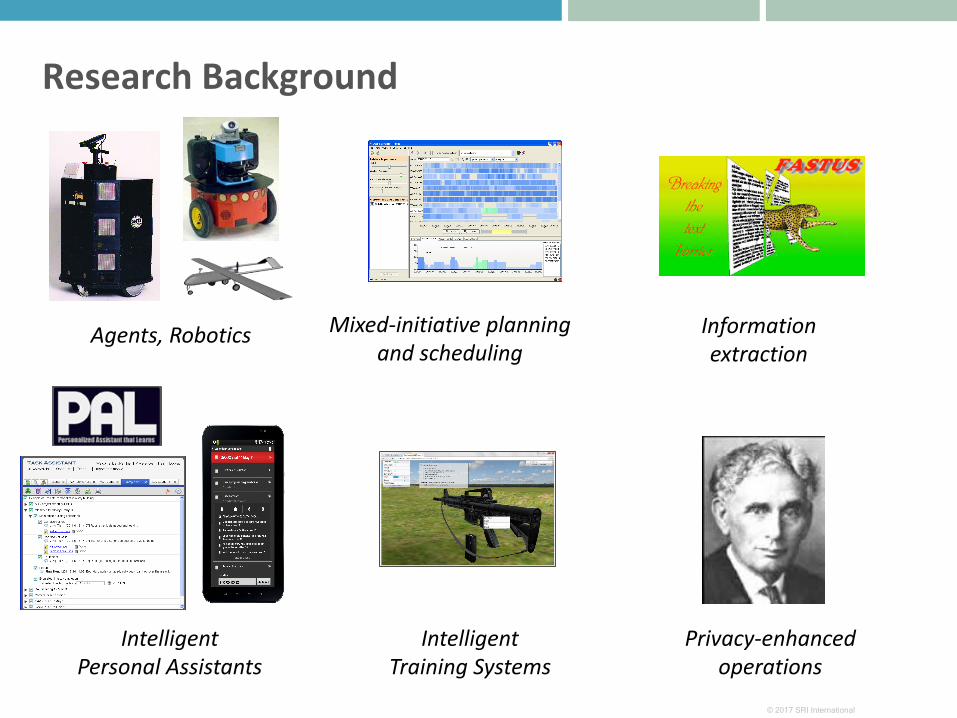
ResearchBackground
Mixed-initiativeplanningandscheduling
Agents,Robotics
IntelligentTrainingSystems
IntelligentPersonalAssistants
Informationextraction
Privacy-enhancedoperations
© 2017 SRI International
AIvsHumans
© 2017 SRI International
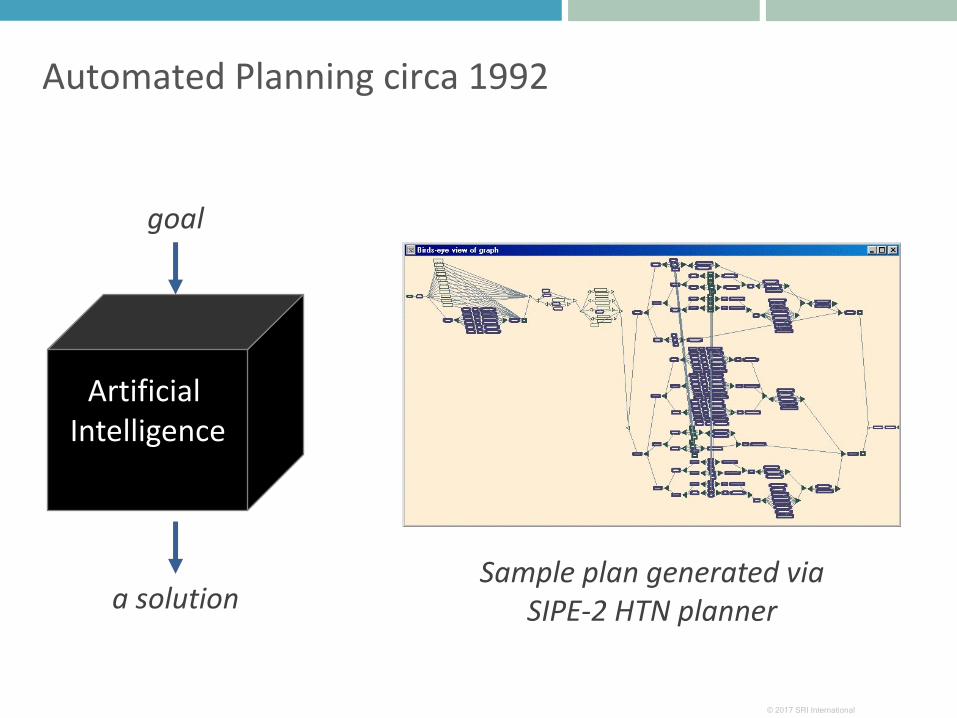
AutomatedPlanningcirca1992
ArtificialIntelligence
goal
a solutionSampleplangeneratedvia
SIPE-2HTNplanner
© 2017 SRI International
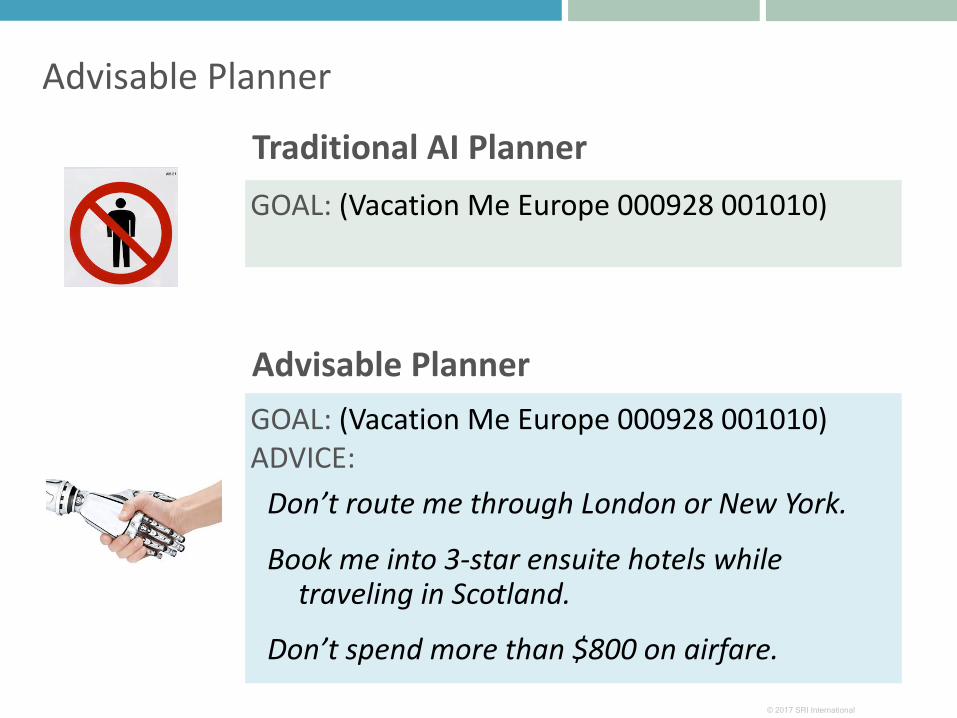
AdvisablePlanner
TraditionalAIPlannerGOAL:(VacationMeEurope000928001010)
GOAL:(VacationMeEurope000928001010)ADVICE:Don’troutemethroughLondonorNewYork.
Bookmeinto3-starensuite hotelswhiletravelinginScotland.
Don’tspendmorethan$800onairfare.
AdvisablePlanner
© 2017 SRI International
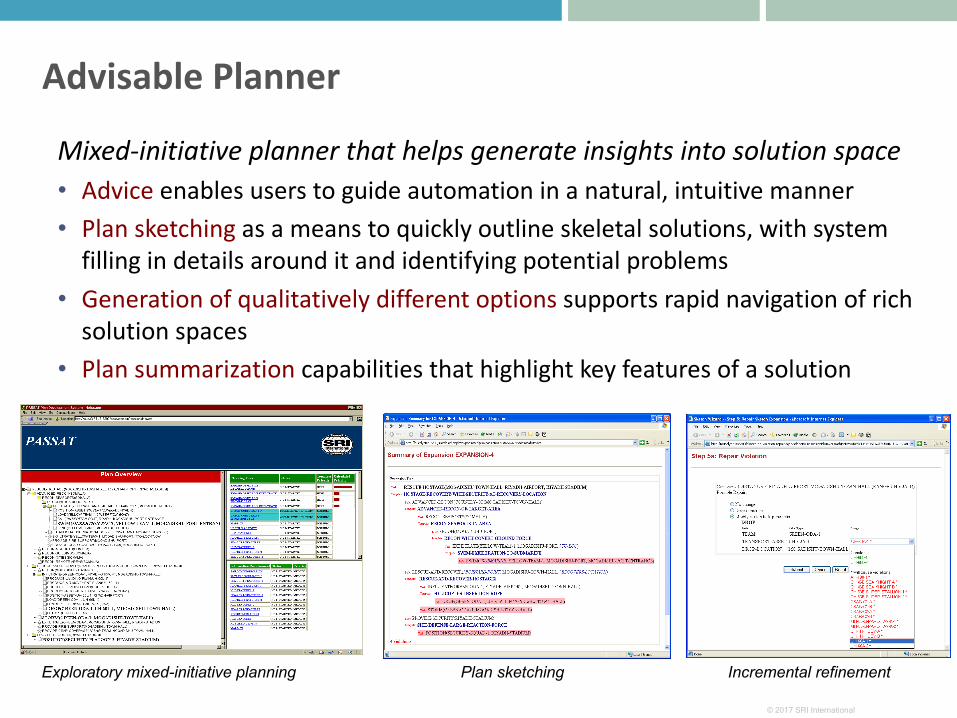
AdvisablePlanner
Mixed-initiativeplannerthathelpsgenerateinsightsintosolutionspace• Adviceenablesuserstoguideautomationinanatural,intuitivemanner• Plansketchingasameanstoquicklyoutlineskeletalsolutions,withsystemfillingindetailsarounditandidentifyingpotentialproblems
• Generationofqualitativelydifferentoptionssupportsrapidnavigationofrichsolutionspaces
• Plansummarizationcapabilitiesthathighlightkeyfeaturesofasolution
Exploratory mixed-initiative planning Incremental refinementPlan sketching
© 2017 SRI International
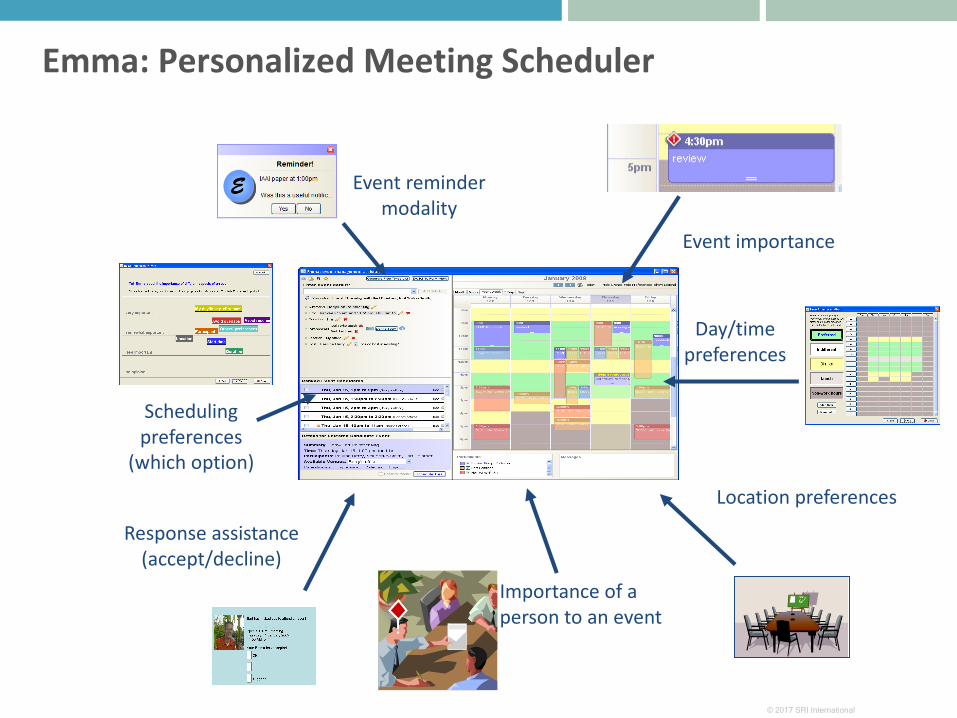
Emma:PersonalizedMeetingScheduler
Locationpreferences
Day/timepreferences
Schedulingpreferences
(whichoption)
Eventimportance
Importanceofapersontoanevent!
Eventremindermodality
Responseassistance(accept/decline)
© 2017 SRI International
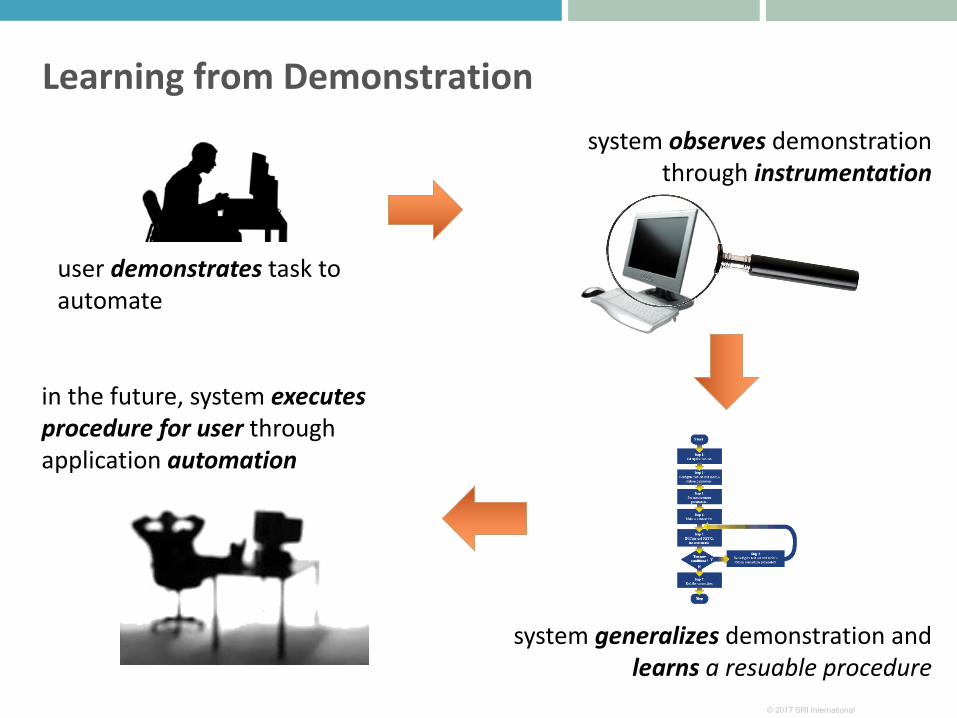
userdemonstrates tasktoautomate
systemobserves demonstrationthroughinstrumentation
systemgeneralizes demonstrationandlearns aresuable procedure
inthefuture,systemexecutesprocedureforuser throughapplicationautomation
LearningfromDemonstration
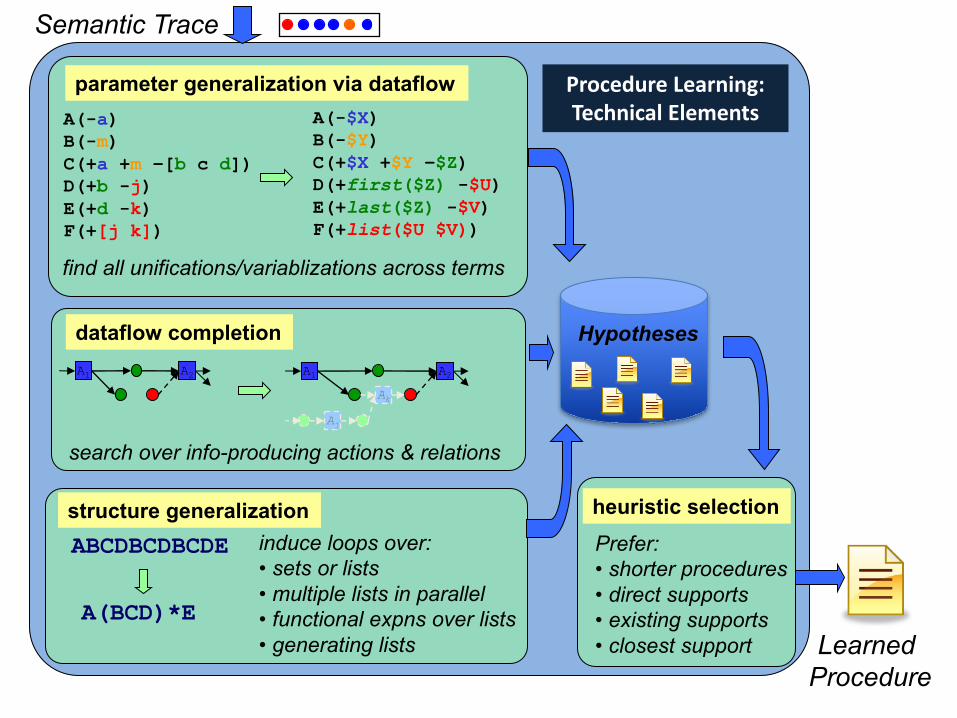
LearnedProcedure
structure generalizationABCDBCDBCDE
A(BCD)*E
induce loops over:• sets or lists• multiple lists in parallel• functional expns over lists• generating lists
dataflow completion
search over info-producing actions & relations
A2A1
Ak
Aj
A2A1
Hypotheses
A(-a)B(-m)C(+a +m –[b c d])D(+b -j)E(+d -k)F(+[j k])
A(-$X)B(-$Y)C(+$X +$Y –$Z)D(+first($Z) -$U)E(+last($Z) -$V)F(+list($U $V))
parameter generalization via dataflow
find all unifications/variablizations across terms
Semantic Trace
heuristic selectionPrefer:• shorter procedures• direct supports• existing supports• closest support
ProcedureLearning:TechnicalElements
© 2017 SRI International
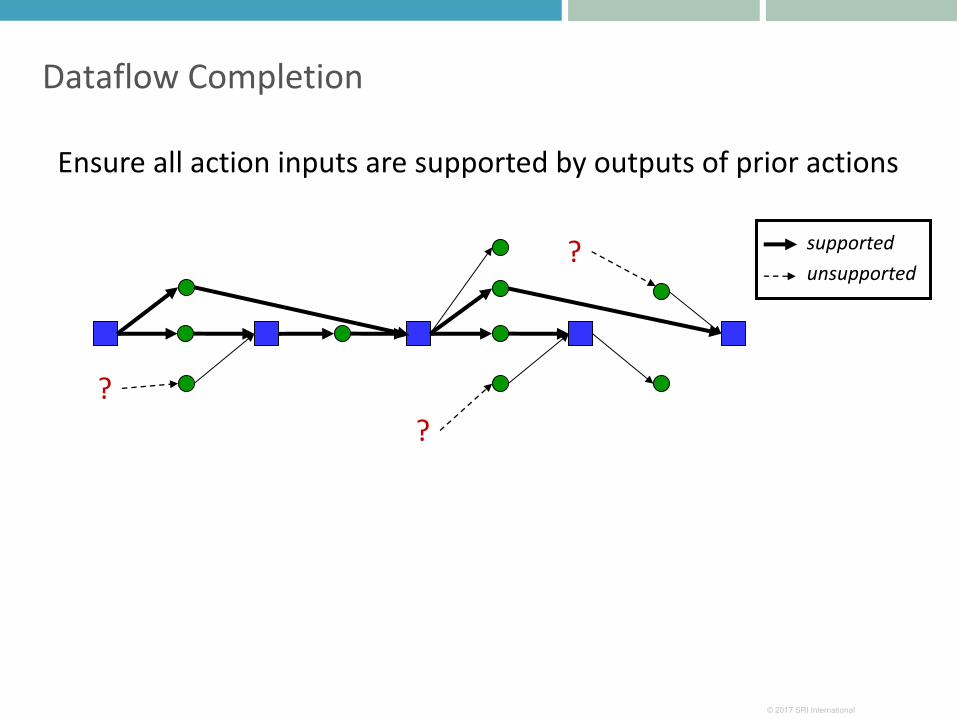
DataflowCompletion
Ensureallactioninputsaresupportedbyoutputsofprioractions
??
? supportedunsupported
© 2017 SRI International
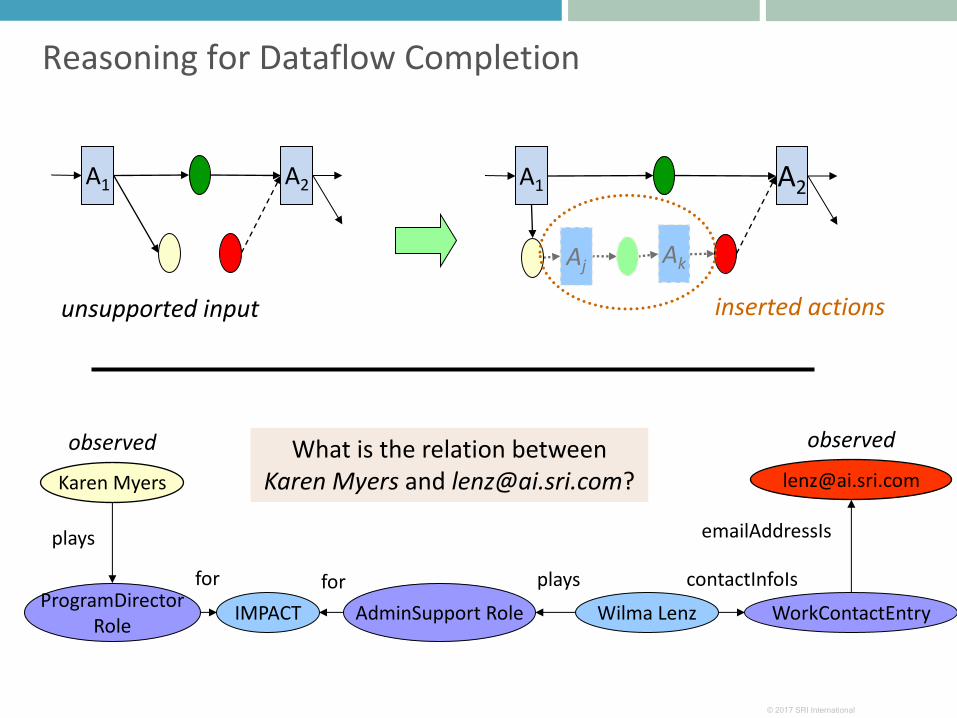
ReasoningforDataflowCompletion
A2A1
AkAj
A2A1
unsupportedinput insertedactions
KarenMyers [email protected]
ProgramDirectorRole IMPACT AdminSupport Role WorkContactEntryWilmaLenz
plays
for for plays contactInfoIs
emailAddressIs
WhatistherelationbetweenKarenMyers [email protected]?
observed observed
© 2017 SRI International
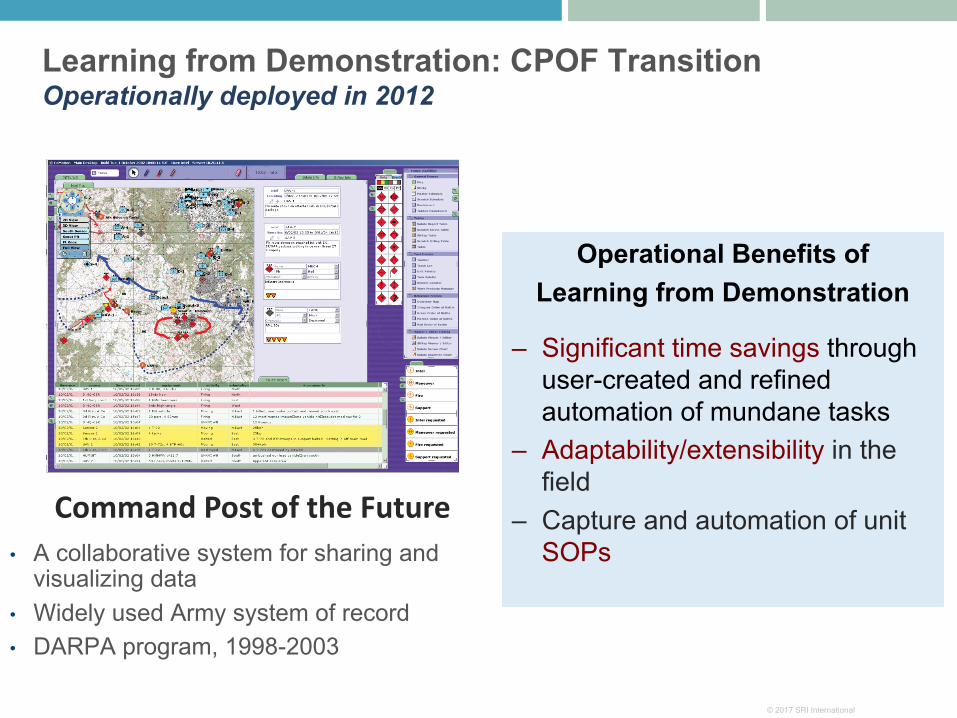
Learning from Demonstration: CPOF TransitionOperationally deployed in 2012
• A collaborative system for sharing and visualizing data
• Widely used Army system of record • DARPA program, 1998-2003
Operational Benefits of Learning from Demonstration
– Significant time savings through user-created and refined automation of mundane tasks
– Adaptability/extensibility in the field
– Capture and automation of unit SOPs
CommandPostoftheFuture
© 2017 SRI International
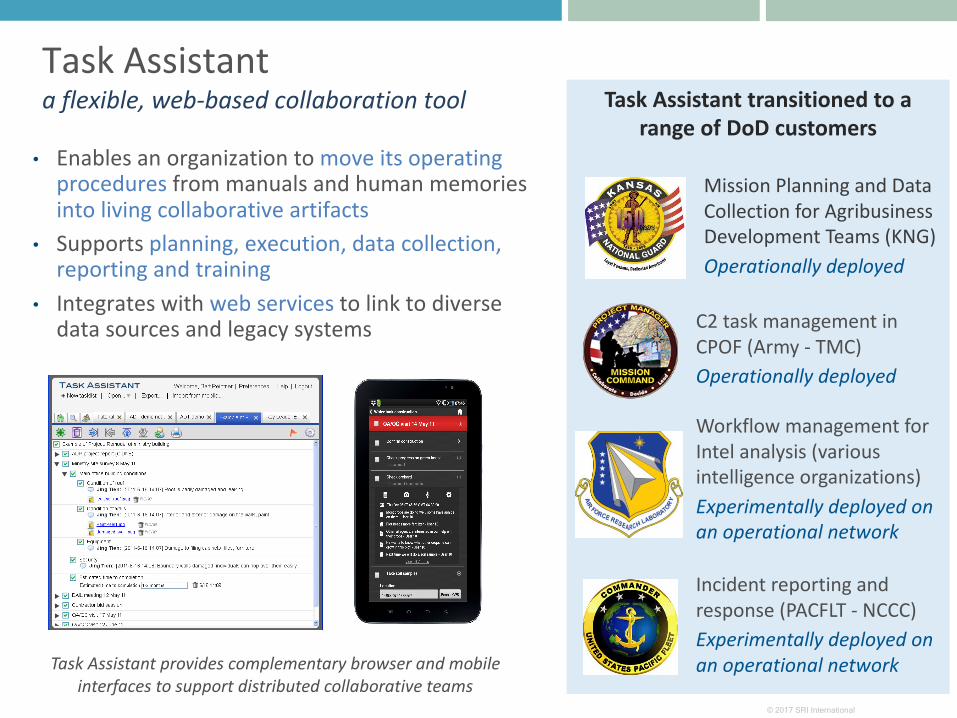
TaskAssistantaflexible,web-basedcollaborationtool
• Enablesanorganizationtomoveitsoperatingproceduresfrommanualsandhumanmemoriesintolivingcollaborativeartifacts
• Supportsplanning,execution,datacollection,reportingandtraining
• Integrateswithwebservicestolinktodiversedatasourcesandlegacysystems
MissionPlanningandDataCollectionforAgribusinessDevelopmentTeams(KNG)Operationallydeployed
C2taskmanagementinCPOF(Army- TMC)Operationallydeployed
TaskAssistantprovidescomplementarybrowserandmobileinterfacestosupportdistributedcollaborativeteams
Incidentreportingandresponse(PACFLT- NCCC)Experimentallydeployedonanoperationalnetwork
WorkflowmanagementforIntelanalysis(variousintelligenceorganizations)Experimentallydeployedonanoperationalnetwork
TaskAssistanttransitionedtoarangeofDoD customers
© 2017 SRI International
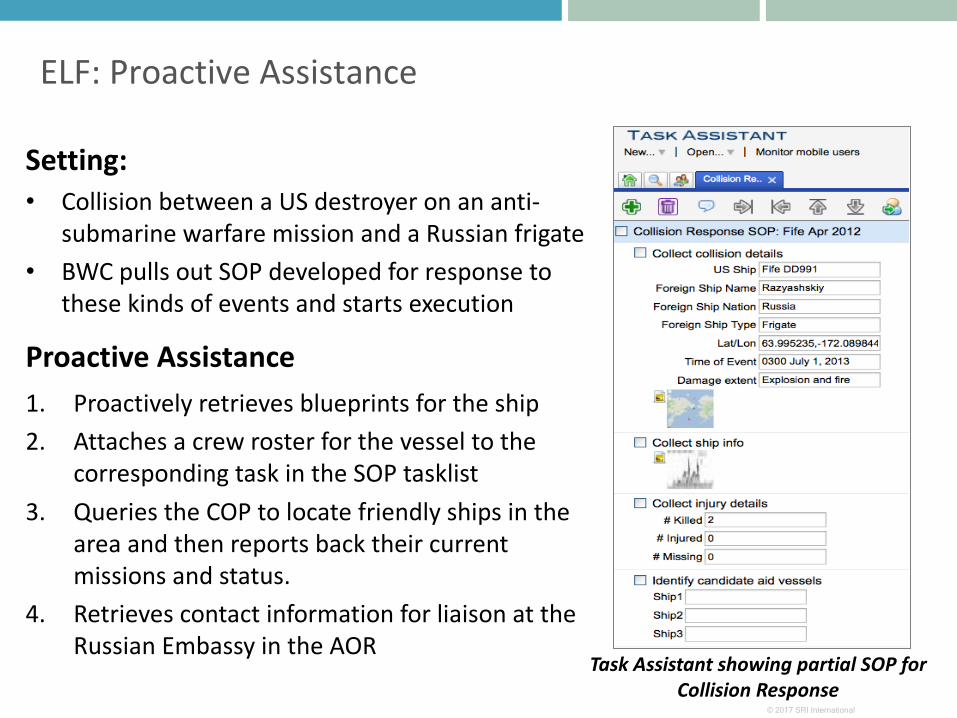
ELF:ProactiveAssistance
TaskAssistantshowingpartialSOPforCollisionResponse
Setting:• CollisionbetweenaUSdestroyeronananti-
submarinewarfaremissionandaRussianfrigate• BWCpullsoutSOPdevelopedforresponseto
thesekindsofeventsandstartsexecution
ProactiveAssistance1. Proactivelyretrievesblueprintsfortheship2. Attachesacrewrosterforthevesseltothe
correspondingtaskintheSOPtasklist3. QueriestheCOPtolocatefriendlyshipsinthe
areaandthenreportsbacktheircurrentmissionsandstatus.
4. RetrievescontactinformationforliaisonattheRussianEmbassyintheAOR
© 2017 SRI International
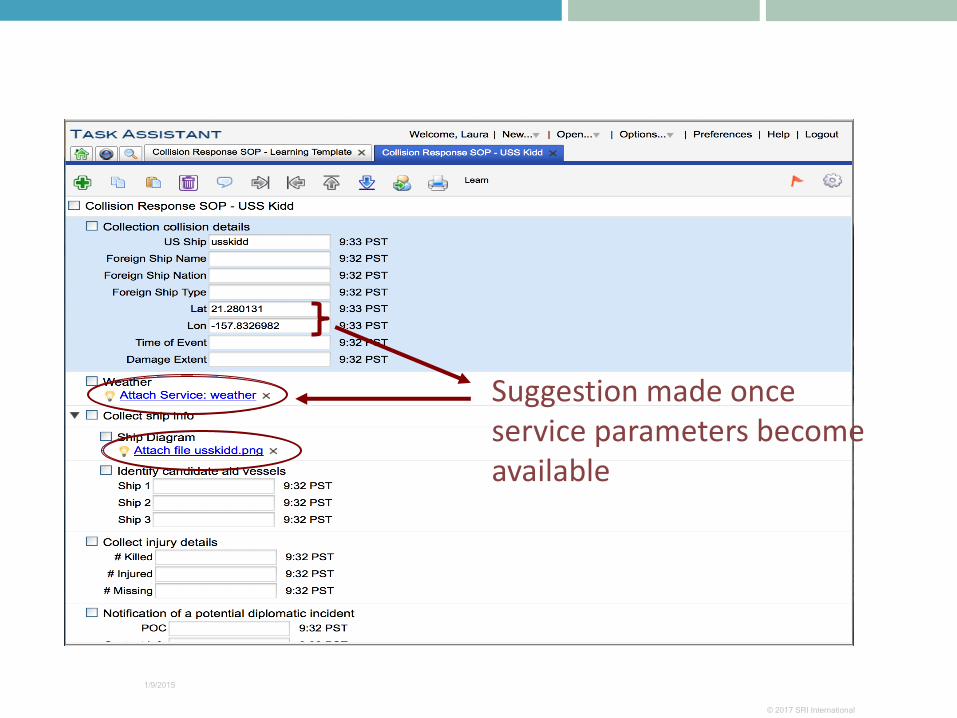
Suggestionmadeonceserviceparametersbecomeavailable
1/9/2015
© 2017 SRI International
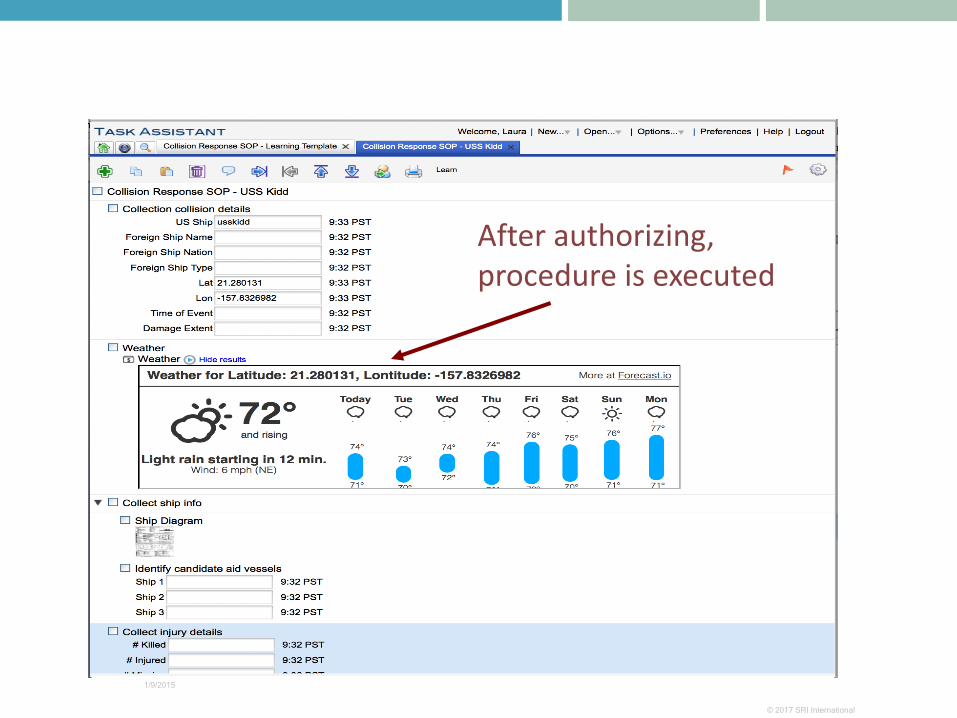
Afterauthorizing,procedureisexecuted
1/9/2015
© 2017 SRI International
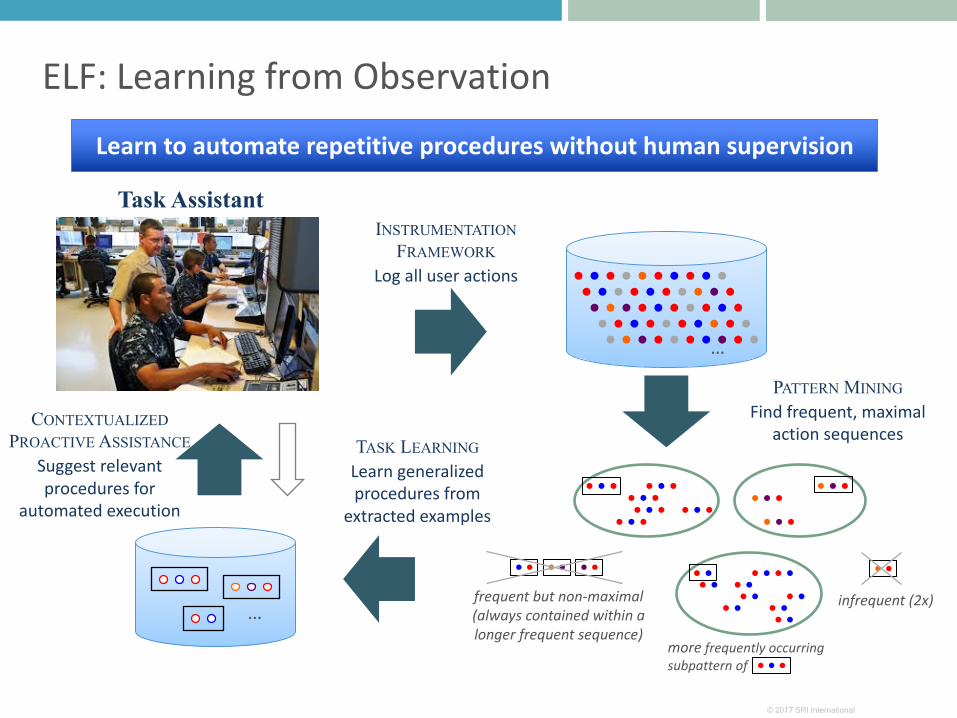
ELF:LearningfromObservation
Learntoautomaterepetitiveprocedureswithouthumansupervision
…
frequentbutnon-maximal(alwayscontainedwithinalongerfrequentsequence)
infrequent(2x)
more frequentlyoccurringsubpatternof
TASK LEARNINGLearngeneralizedproceduresfrom
extractedexamples
PATTERN MININGFindfrequent,maximal
actionsequencesCONTEXTUALIZED
PROACTIVE ASSISTANCESuggestrelevantproceduresfor
automatedexecution
INSTRUMENTATIONFRAMEWORK
Logalluseractions
…
Task Assistant
© 2017 SRI International
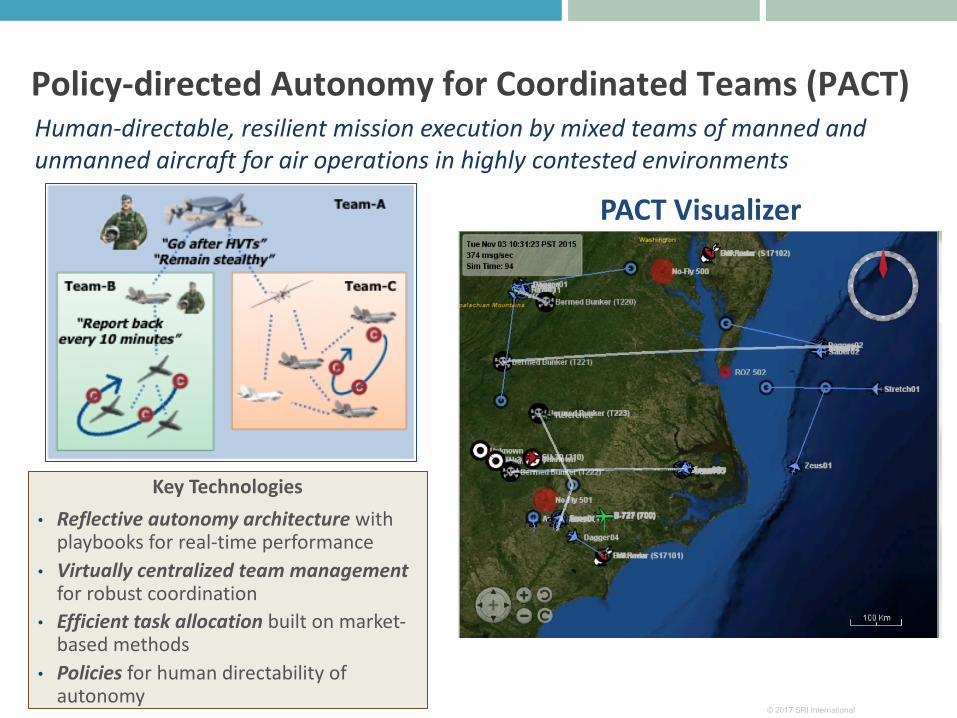
Policy-directedAutonomyforCoordinatedTeams(PACT)Human-directable,resilientmissionexecutionbymixedteamsofmannedandunmannedaircraftforairoperationsinhighlycontestedenvironments
KeyTechnologies• Reflectiveautonomyarchitecturewithplaybooksforreal-timeperformance
• Virtuallycentralizedteammanagementforrobustcoordination
• Efficienttaskallocation builtonmarket-basedmethods
• Policies forhumandirectability ofautonomy
PACTVisualizer
©2016SRIInternational
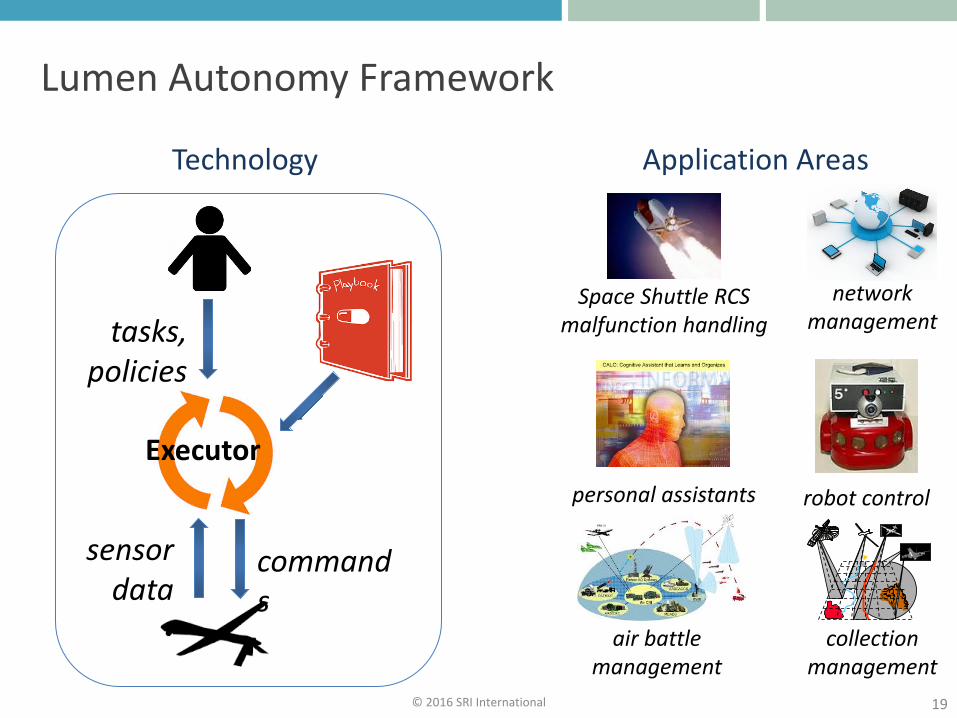
LumenAutonomyFramework
19
robotcontrolpersonalassistants
networkmanagement
SpaceShuttleRCSmalfunctionhandling
ApplicationAreas
airbattlemanagement
collectionmanagement
Technology
Executor
sensordata
commands
tasks,policies
© 2017 SRI International
Headquarters333RavenswoodAvenueMenloPark,CA94025+1.650.859.2000
Princeton,NJ201WashingtonRoadPrinceton,NJ08540+1.609.734.2553
AdditionalU.S.andinternationallocations
www.sri.com
ThankstoMyCollaborators!
Thomas GarveyMelinda Gervasio
Will HainesChris JonesKellie KeiferThomas LeeKyle McIntyre
David MorleyJanet MurdockBart Peintner
Martha PollackAndres Rodrigo
Laura TamMichael Wolverton