lab for reliable computing generalized latency-insensitive systems for single-clock and multi-clock...
Post on 21-Dec-2015
219 views
TRANSCRIPT

Lab for Reliable Computing
Generalized Latency-Insensitive Systems for
Single-Clock and Multi-Clock Architectures
Singh, M.; Theobald, M.;
Design, Automation and Test in Europe Con
ference and Exhibition, 2004.

Lab for Reliable Computing, 2004/4
Kun-Sheng Huang 2
ReferenceReference
A methodology for correct-by-construction latency insensitive designCarloni, L.P.; McMillan, K.L.; Saldanha, A.; Sangiovanni-Vincentelli, A.L.;Computer-Aided Design, 1999. Digest of Technical Papers. 1999 IEEE/ACM International Conference

Lab for Reliable Computing, 2004/4
Kun-Sheng Huang 3
OutlineOutline
Introduction
Latency-Insensitive Systems
New Approach – Part I: More Flexible Synchronous Modules
New Approach – Part II: Arbitrary Communication Network Topologies
Conclusions
Lab for Reliable Computing, 2004/4
Kun-Sheng Huang 4
IntroductionIntroduction
Latency-insensitive systems were originally proposed for the design of single-clock SoC’s
A synchronous module is said to be latency-insensitive if it can operate correctly in the presence of arbitrary delays on its input and output channels
Two limitations of original research: 1. Assumption that the data rates on all input a
nd output channels of a synchronous module are identical
2. Only considers point-to-point interconnects

Lab for Reliable Computing, 2004/4
Kun-Sheng Huang 5
Latency-Insensitive Systems(1/4)
Using clock gating to stall a module whenever any of its communication channels is unavailable
Encapsulating the synchronous modules inside specially-designed “wrapper” circuits
As a result of this encapsulation, the synchronous blocks become more modular, thereby facilitating design reuse

Lab for Reliable Computing, 2004/4
Kun-Sheng Huang 6
Latency-Insensitive Systems(2/4)
Figure 1. Carloni et al.’s approach to latency-insensitive design

Lab for Reliable Computing, 2004/4
Kun-Sheng Huang 7
Latency-Insensitive Systems(3/4)
Communication between the modules is achieved using point-to-point channels
The complete design flow consists of four basic steps:
1. Specification of synchronous components
2. Encapsulation
3. Physical layout, placement and routing
4. Relay station insertion

Lab for Reliable Computing, 2004/4
Kun-Sheng Huang 8
Latency-Insensitive Systems(4/4)
Lab for Reliable Computing, 2004/4
Kun-Sheng Huang 9
More Flexible Synchronous Modules
Carloni et al.’s approach uses a simplifying assumption:
Every input/output channel is exercised by a module on every clock tick
Thus, may cause a significant loss of throughput by generating more stalls than necessary
Lab for Reliable Computing, 2004/4
Kun-Sheng Huang 10
Example(1/2)
Lab for Reliable Computing, 2004/4
Kun-Sheng Huang 11
Example(2/2)
Carloni et al.’s approach can be made to work in this scenario provided M1 sends nine “garbage” data values to M2
This approach may introduce additional critical paths into the system, thereby potentially causing loss of performance
Transmitting unnecessary data values is wasteful of power
Apply to the stall generation circuitry inside the wrapper circuit
Lab for Reliable Computing, 2004/4
Kun-Sheng Huang 12
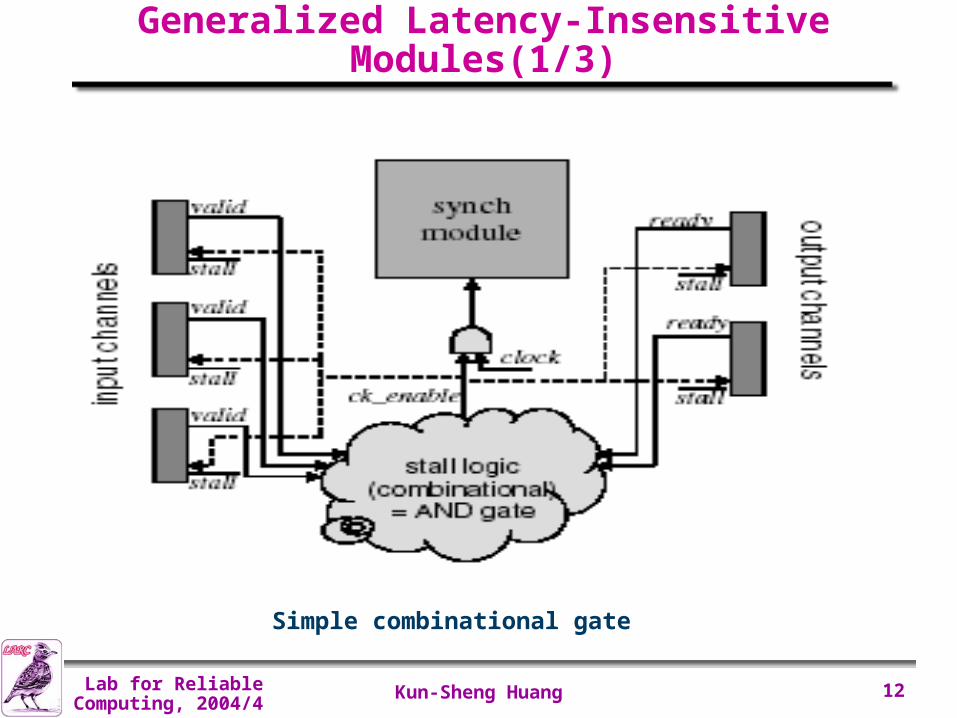
Generalized Latency-Insensitive Modules(1/3)
Simple combinational gate
Lab for Reliable Computing, 2004/4
Kun-Sheng Huang 13
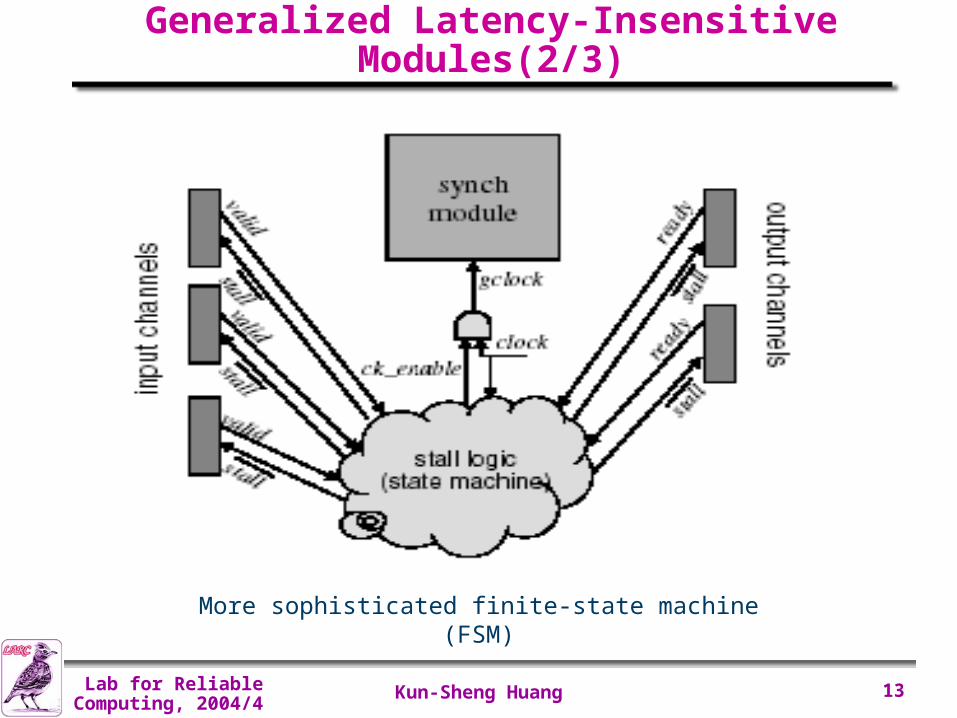
Generalized Latency-Insensitive Modules(2/3)
More sophisticated finite-state machine (FSM)
Lab for Reliable Computing, 2004/4
Kun-Sheng Huang 14
Generalized Latency-Insensitive Modules(3/3)
The generalization presented here has two key benefits
1. A significant reduction in unnecessary stalls may be obtained, since stalls are no longer caused by the unavailability of those channels that are not currently needed
2. Modules that are not currently producing needed outputs can be safely stalled, without fear of stalling their neighbors; As a result, significant savings in power consumption may be obtained
Lab for Reliable Computing, 2004/4
Kun-Sheng Huang 15
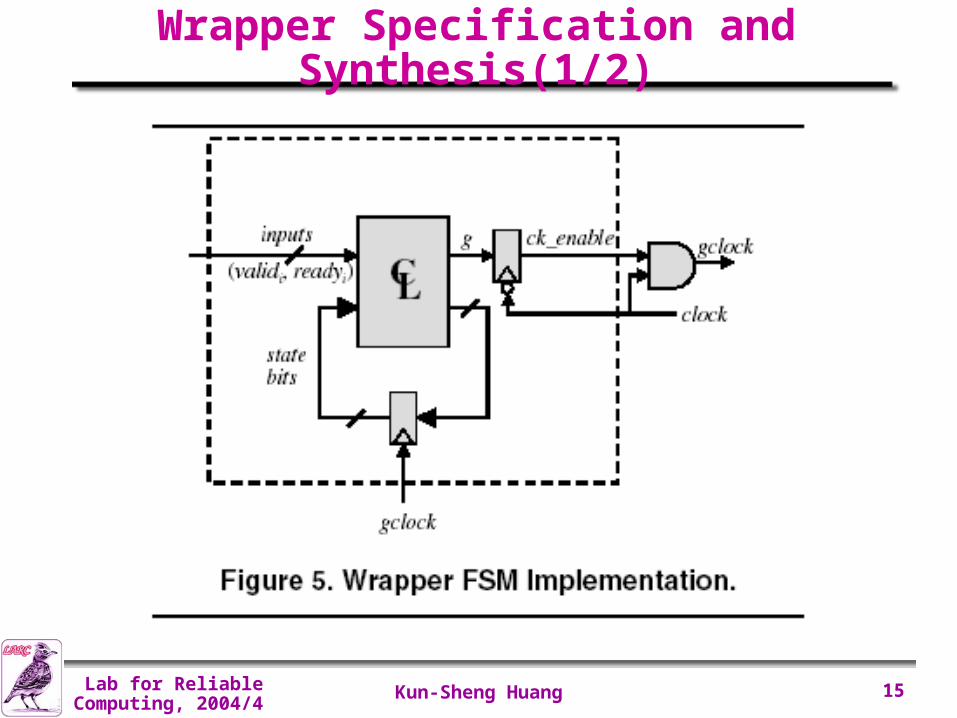
Wrapper Specification and Synthesis(1/2)

Lab for Reliable Computing, 2004/4
Kun-Sheng Huang 16
Wrapper Specification and Synthesis(2/2)
There are two interesting features of Figure 5: 1. The machine’s output g is latched by a regi
ster on the negative clock edge before being used to gate the module’s clock
2. The second feature is that the register that stores the state bits is controlled by gclock, not by the original clock (clock)
Lab for Reliable Computing, 2004/4
Kun-Sheng Huang 17
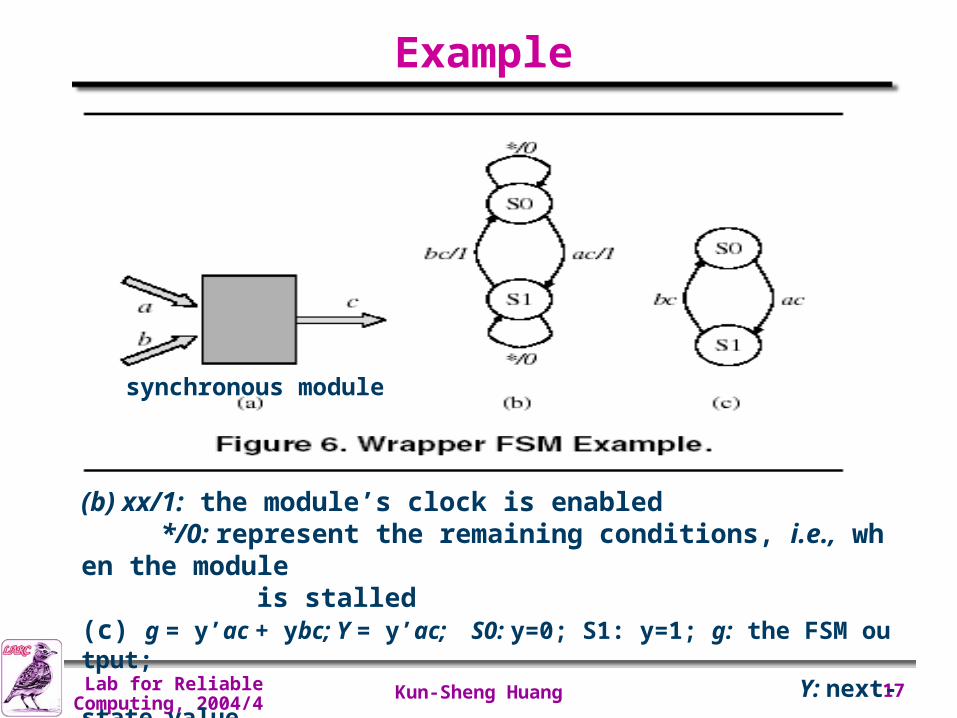
Example
synchronous module
(b) xx/1: the module’s clock is enabled */0: represent the remaining conditions, i.e., when the module is stalled(c) g = y’ac + ybc; Y = y’ac; S0: y=0; S1: y=1; g: the FSM output; Y: next-state value
Lab for Reliable Computing, 2004/4
Kun-Sheng Huang 18
Arbitrary Communication Network Topologies
The basic approach to latency-insensitive design assumes that all channels in the system are point-to-point channels
Augment the basic approach with arbitrary communication network topologies

Lab for Reliable Computing, 2004/4
Kun-Sheng Huang 19
Example
The actual throughput obtained may even be less than the rate of the slowest module because, in addition, the slowest module may be stalled at times
Lab for Reliable Computing, 2004/4
Kun-Sheng Huang 20
Generalized Communication Network (1/3)
Using a number of specialized blocks to implement the communication network
Specialized blocks include:
(i) forks, which replicate one input data stream onto multiple output channels
(ii) splits, which distribute data from one input channel onto multiple output channels
(iii) merges, which combine (i.e., interleave) multiple input data streams onto one output channel

Lab for Reliable Computing, 2004/4
Kun-Sheng Huang 21
Generalized Communication Network (2/3)
Three steps: 1. Specify the communication network topology, either
using the specialized blocks, or using a high-level CSP-like language such as Tangram or Balsa
2. Choose between a synchronous and an asynchronous implementation; If synchronous, implement as stallable finite-state machines; If asynchronous, implement using predesigned handshake circuits available in Tangram and Balsa
3. Identify wires with long latencies. Segment them, and insert relay stations (synchronous) or FIFO handshake cells (asynchronous)

Lab for Reliable Computing, 2004/4
Kun-Sheng Huang 22
Generalized Communication Network (3/3)
The net impact of the proposed generalization of the communication network is two-fold:
1. A significantly greater degree of expressivity is offered for the specification of inter-module communication
2. The designer is offered much greater freedom to “mix-’n-match” modules of different speeds and different types of interfaces

Lab for Reliable Computing, 2004/4
Kun-Sheng Huang 23
Conclusions
The first extension allows much greater flexibility in interfacing a synchronous module with its I/O channels, thereby allowing higher system throughput through elimination of unnecessary stalls
The second extension proposes more general communication network topologies than the currently popular point-to-point interconnects
The third extension allows the handling of multiple clock domains

Lab for Reliable Computing, 2004/4
Kun-Sheng Huang 24
Relay stationRelay station