cenidet juan hermilo... · se presenta una revisión del estado del arte sobre las diferentes...
TRANSCRIPT

S.E.P. S.E.I.T. D.G.I.T.
CENTRO NACIONAL DE INVESTIGACIÓN Y DESARROLLO TECNOL~GICO
cenidet
CONVERTIDOR CD-CA, BASADO EN EL CONVERTIDOR REDUCTOR-ELEVADOR, PARA APLICACI~N EN
SISTEMAS DE ALIMENTACI~N ININTERFWMPIBLE
T E S I S P A R A O B T E N E R E L G R A D O D E :
M A E S T R O E N C I E N C I A S
EN INGENIE& ELECTR~NICA P R E S E N T A :
JUAN HERMILO ALMAZÁN COVARRUBIAS
SEP CENfQET QGIT CENTRO DE BNFORMACIOH
DIRECTOR DE TESIS
DR JAIME E. ARAU ROFFIEL M.C. NIMROD VÁZQUEZ NAVA
CUERNAVACA, MORELOS JULIO 2000

S.E.P. S.E.1.T -
S.N.1.T
CENTRO NACIONAL, DE INVESTIGACIÓN Y DESARROLLO TECNOLÓGICO cenidet
ACADEMIA DE LA MAESTFÚA EN ELECTRÓNICA
FORMA R11 ACEPTACION DEL TRABAJO DE TESIS
Cuemavaca, Mor.
Dr. Amoldo Bautista Corral Director del cenidet Presente
Jefe del Depto. de Electrónica At’n. Dr. Luis G. Vela Váldez
Después de haber revisado el trabajo de tesis titulado: “Convertidor CD-CA, Basado en el Convertidor Reductor-Elevador, para Aplicación en Sistemas de Alimentación Ininterrumpible”, elaborado por el alumno Juan Hermilo Almazán Covarrubias, bajo la dirección del Dr. Jaime E. Arau Roffiel y co-dirección M.C. Nimrod Vázquez Nava, el trabajo presentado se ACEPTA para proceder a su impresión.
A T E N T A M E N T E
c- 9. Dr. Victor M. Cárdemas Galindo
C.C.P.: Dr. Abraham Claudia Sánchez / Pdte. de la Academia de Electrónica Ing. Jaime Rosas Alvarez / Jefe del Depto. de Servicios Escolares Expediente.
0.Q.I.T S E P CENTRO NACQNM DE I h W S n W I ~
V DESARROLLO lECNoLOQ(c0 SUBOIRECCION ACADEWA
INTERIOR INTERNADO PALMIPA W, CUERNAVACA, MOR. MCXICO AP 5.164 CP 620%. CUERNAVACA, TELC.(73)12 2314.12 7613 ,I8 7741, FAX(73) 12 2424 Or. Luis G. Vela VáldellJeíe del Depb de ElecWnica EMAlL [email protected] cenidet

Centro Nacional de Investigación y Desarrollo Tecnológico
Cuernavaca, Morelos
Ing. Juan Hermilo Almazán Covarrubiac Candidato al grado de Maestro en Ciencias en Ingeniería Electrónica Presente
Después de haber sometido a revisión su trabajo final de tesis titulado: "CONVERTIDOR CD-CA, BASADO EN EL CONVERTIDOR REDUCTOR-ELEVADOR, PARA SU APLICACIÓN EN SISTEMAS DE ALIMENTACIÓN ININTERRUMPIBLE, y habiendo cumplido con todas las indicaciones que el jurado revisor de tesis le hizo, le comunico que se le concede autorización para que proceda a la impresión de la misma, como requisito para la obtención del grado.
Reciba un cordial saludo.
A T E N T A M E N T E
Dr. Luis Gerard0 Vela Vaidéz Jefe del Depto. de Electrónica
C.C.P. exQediente
INTERIOR INTERNADO PALMIRA SíN, CUERNAVACA. MOR. MCXICO AP 5.164 CP 62053, CUERNAVACA, TELC. (73)122314,127613,187741, FAX (73) 122436 DI. Luir Geramo Vela Va!& JJele del Depb de Elem3nk-a EMAlL velaluis~a)nidet.edu.mx
0.0.1.1 8.E.P CEWRO NACIONAL OE ~wsnmcm
Y M~RROLLO TECNOLOO~CO SUBDlRECClON ACADEMW
cenidet

Dedico este trabajo:
A Dios por haberme dado la vida.
A m i s padres: Margarita y H e d o .
A m i s hermanos: César, Sonia, Diana y Max.
A mi esposa: Margarita.

Agradezco:
A m i s directores de tesis el Dr. Jaime Arau y el M.C. Nimrod Vázquez por haberme apoyado en todo
momento durante el desarrollo de este trabajo.
A m i s revisores de tesis el Dr. Abraham Claudio, la M.C. Patricia Caratozzolo y el Dr. Victor Cárdenas
por sus invaluables comentarios, los cuales contribuyeron a mejorar este trabajo.
A m i s compañeros de generación: Carla, Nancy, Armando, S d u e , I v h , Antonio, Victor, Marco, Esteban,
Alh y Jesús por su amistad.
A todo el personal del CENIDET, muy especialmente a la Sra. María Elena.
Al CONACYT y la SEP por el apoyo económico que me brindaron.

RESUMEN
El inversor tipo puente completo o inversor Reductor es uno de los convertidores cuyo uso se encuentra más extendido dentro de la Electrónica de Potencia. Este inversor se utiliza en un gran número aplicaciones industriales y comerciales siendo algunas de las más importantes los variadores de velocidad para motores de CA y los sistemas de alimentación ininterrumpible (SA1 o UPS por sus siglas en inglés). Una de las principales caractensticas del inversor Reductor es que el voltaje de salida siempre es menor al voltaje de entrada. Como consecuencia, en aplicaciones donde se requiere un voltaje de salida mayor al voltaje de entrada es necesario agregar una etapa que proporcione la capacidad de elevación.
En particular, algunas aplicaciones de este tipo son los sistemas fotovoltaicos (SF) y los sistemas de alimentación ininterrumpible (SAI) donde a partir de una tensión de baterías, entre 12 y 48 Volts, es necesario obtener la tensión de línea (127 Vrms). Generalmente esto se soluciona utilizando dos etapas conectadas en cascada donde una eleva tensión de CD o CA y la otra realiza el proceso de inversión (CD-CA). Sin embargo estas soluciones presentan baja eficiencia, debido a que tienen dos etapas en cascada, y algunas de ellas requieren un transformador elevador que por ser de baja frecuencia, es pesado y voluminoso.
Además de la eficiencia, estos sistemas presentan una pobre respuesta dinámica, especialmente ante carga no-lineal, debido a que las técnicas utilizadas convencionalmente para controlar la etapa inversora no son las más adecuadas considerando la estructura variable del inversor y la naturaleza no-lineal de la carga.

La solución propuesta al problema planteado consiste en estudiar, analizar y probar un inversor que posea la capacidad de elevación: el inversor Reductor-Elevador (denominado así por derivarse de convertidores Reductores-Elevadores). Este inversor permite invertir y elevar tensión en una sola etapa con lo cual se consigue incrementar la eficiencia.
Por otro lado, para mejorar la respuesta dinámica de estos sistemas se propone implementar en el inversor desarrollado, una estrategia de control basada en la teona de sistemas de estructura variable: el Control por Modos Deslizantes (SMC por sus siglas en inglés). Las principales motivaciones para utilizar SMC son: la rápida respuesta dinámica y robustez caractensticas de esta estrategia, además de que el inversor Reductor-Elevador posee una estructura variable.
El documento de tesis, está organizado en cuatro capítulos. El primer capítulo describe los principios de funcionamiento, las principales configuraciones y la problemática asociada a la etapa inversora de los sistemas de alimentación ininterrumpible y los sistemas fotovoltaicos. Se presenta una revisión del estado del arte sobre las diferentes soluciones, utilizadas convencionalmente, para resolver dicha problemática y se plantea la solución propuesta.
En el capítulo 2 se muestra un análisis detallado del inversor Reductor-Elevador que incluye ganancia, ciclo de trabajo, comente en el inductor, esfuerzos en los semiconductores y se obtiene un modelo para el inversor. También se describe el principio de funcionamiento, el diseño y algunos aspectos de la implementación práctica del controlador por modos deslizantes. Se presenta un ejemplo de diseño del inversor Reductor-Elevador, algunas simulaciones y los resultados experimentales obtenidos.
En el capítulo 3 se describen y analizan otras dos alternativas de inversores: el inversor Elevador y el inversor Reductor. El análisis de ambos inversores muestra ganancia, ciclo de trabajo, comente en el inductor, esfuerzos en los semiconductores y un modelo para el inversor. Se presenta el diseño del controlador por modos deslizantes, las simulaciones y los resultados experimentales obtenidos en cada uno de los inversores. Además se muestra un análisis comparativo entre los inversores Reductor-Elevador, Elevador y Reductor sobre parámetros como los esfuerzos en tensión y comente a través de los semiconductores, la tensión máxima que soportan los capacitores de salida, el producto de áreas y el número de componentes activos y pasivos requeridos en cada caso.
El capítulo 4 comprende las conclusiones, los logros y las perspectivas futuras del trabajo de investigación. Las conclusiones se encuentran divididas en los principales aspectos abordados en el desarrollo del trabajo.
INDICE
Capítulo 1 Introducción
1.1
1.2
1.3
1.4
1.5
Sistemas de alimentación inintemmpible 1 . 1 . 1 Etapas de un SAi 1.1.2 Configuraciones de los SA1
1.2.1 Etapas de un SF en CA 1.2.2 Configuraciones de los SF en CA
1.3.1 Eficiencia 1.3.2 Respuesta dinámica
1.4.1 Soluciones que emplean un transformador de baja frecuencia 1.4.2 Soluciones que emplean un convertidor CD-CD 1.4.3 Técnicas de modulación por anchura de pulso (PWM) 1.4.4 Control por modos deslizantes en los convertidores CD-CD 1.4.5 Inversores con capacidad de elevación 1.4.6 Inversor elevador controlado por modos deslizantes
Solución propuesta 1.5.1 Objetivos
Sistemas fotovoltaicos
Problemática en la etapa inversora
Estado del arte
1 2 2 4 4 5 6 6 7 8 8 9
12 13 14 15 16
lo \
... 111

Capítulo 2 El inversor reductor elevador
2.1
2.2 2.3 2.4
2.5
2.6
Análisis del inversor 2.1.1 Ganancia 2.1.2 Ciclo de trabajo 2.1.3 Comente en el inductor 2.1.4 Esfuerzos en los semiconductores 2.1.5 Cálculo del inductor 2.1.6 Cálculo del capacitor
Modelo del inversor Teoría básica del control por modos deslizantes Diseño del controlador por modos deslizantes
2.4.1 Superficie deslizante 2.4.2 Ley de control 2.4.3 Existencia del modo deslizante 2.4.4 Dinámica de deslizamiento ideal 2.4.5 Propiedad de rechazo a perturbaciones
2.5.1 Circuitos para limitar la frecuencia 2.5.2 Referencias para las variables de estado
Ejemplo de diseño 2.6.1 Especificaciones 2.6.2 Diseño 2.6.3 Simulaciones 2.6.4 Resultados experimentales
Implementación práctica del controlador
Capítu.,, 3 Comparación con otras Jternativa- d
3.1 El inversor elevador 3.1.1 Análisis y diseño 3.1.2 Diseño del controlador 3.1.3 Simulaciones 3.1.4 Resultados experimentales
3.2.1 Análisis y diseño 3.2.2 Diseño del controlador 3.2.3 Simulaciones 3.2.4 Resultados experimentales
3.3.1 Eficiencia 3.3.2 Distorsión armónica total (THD) 3.3.3 THD ante carga no lineal
3.2 El inversor reductor
3.3 Análisis comparativo
11 19 20 21 21 24 24 25 27 30 30 30 32 35 35 36 31 40 41 41 41 43 45
inversores
49 49 57 59 61 63 63 71 12 14 16 76 77 78
3.3.4 Parámetros adicionales 18 iv

Capítulo 4 Conclusiones
4.1 El trabajo de investigación 4.2 4.3 4.4
4.6 Trabajos futuros
El inversor reductor elevador y el inversor elevador Los inversores elevadores y una solución en dos etapas El controlador por modos deslizantes
4.5 Logros
81 82 84 85 85 86
Apéndice A Diseño magnético
Apéndice B Bibliografía
Apéndice C Lista de símbolos
87
89
93

vi

CAPITULO 1
El presente trabajo de investigación constituye una alternativa de solución a la problemática en los sistemas fotovoltaicos (SF) y los sistemas de alimentación ininterrumpible (SAI), aplicaciones que en las últimas décadas han cobrado gran importancia. Y aunque el trabajo está enfocado principalmente en este tipo de sistemas, también puede utilizarse en cualquier otra aplicación donde se requiera convertir comente directa (CD) en comente alterna (CA) a partir de una tensión de entrada baja sin la necesidad de aislamiento galvánico, ya sea porque alguna otra etapa del sistema lo proporciona o porque la aplicación en si no lo requiera.
1.1 SISTEMAS DE ALIMENTACI~N ININTERRUMPIBLE
Cada día se integran más equipos y sistemas electrónicos dentro de la sociedad moderna que tienen como Única fuente de energía la red eléctrica. Debido a que en algunos de estos sistemas, denominados cargas críticas, una falla parcial o total en la red eléctrica podría interrumpir o suspender algunos servicios vitales provocando pérdidas humanas o económicas, es necesario contar con algún medio para proporcionar respaldo de energía. Generalmente la forma en que se consigue el respaldo de energía es utilizando un Sistema de Alimentación Inintemmpible (SA1 o UPS por sus siglas en inglés).

.--- ,
Capitulo I Introducción
El Industrial and Commercial Power Committee del Institute of Electric and Electronics Engineers (IEEE por sus siglas en inglés) define un SAI, como un sistema diseñado para suministrar energía durante los lapsos de tiempo en que la fuente de energía principal se encuentra fuera de los límites aceptables, sin provocar la interrupción del flujo de energía hacia la carga [ 11.
de en de
La primera función que desempeñaron los SA1 fue precisamente proporcionar respaldo energía a cargas críticas para mantenerlas funcionando ante una falla en la red eléctrica; los últimos años los SA1 han desempeñado otra función, que consiste en aislar a la carga cualquier perturbación en la red eléctrica. La períurbación más común en la red eléctrica,
es la disminución de la tensión por debajo del valor mínimo requerido para el funcionamiento de cargas críticas, durante lapsos de tiempo que pueden durar desde segundos hasta horas [ 11.
Ante una falla en la red eléctrica, los SA1 proporcionan respaldo de energía a la carga crítica para mantenerla en funcionamiento hasta que se restablezca la red eléctrica, o al menos el tiempo suficiente para que se apague adecuadamente la carga. En condiciones de emergencia donde la carga crítica debe mantenerse funcionando, los SA1 pueden proporcionar energía durante el tiempo necesario para el encendido de un generador de combustión interna u oiro sistema alterno de energía.
1.1.1 Etapas de un SA1 En la figura 1.1 se muestra un diagrama a bloques típico de un SAI, el cual está
compuesto por las siguientes etapas: un dispositivo para almacenar energía (generalmente batenas), un rectificador-cargador para recargar las baterías, un inversor para convertir la tensión de las baterías (CD) en una tensión de salida (CA) regulada y un interruptor automático que conecta la carga con el inversor o la red eléctrica, dependiendo de la configuración.
interruptor j, Automático Red
Eléctrica Carga
Inversor Rectificador Cargador T
1_ - - Figura 1.1 Diagrama de bloques de un S A L
1.1.2 Configuraciones de los SAI
Existen vanas configuraciones para un SAI, las cuales están en función de las necesidades del usuario. Las dos configuraciones más utilizadas son: SA1 en línea (on-line) y SA1 fuera de línea (off-line).
2

Capítulo I Introducción
Una descripción más detallada del funcionamiento y revisión de sus ventajas y desventajas puede encontrarse en [ 11. En este documento solo se hará una breve descripción para presentar un panorama general de los sistemas de alimentación ininterrumpible (SAI).
Red Ekctrica
SAI en línea
En esta configuración, el SA1 alimenta a la carga en condiciones normales de operación y solo ante una falla o para mantenimiento del SAI, el interruptor transfiere la alimentación de la carga a la red eléctrica. Posteriormente, cuando se restablece el suministro de energía el rectificador-cargador proporciona la corriente necesaria para recargar las baterías así como la comente que demanda el inversor para alimentar a la carga. Esta configuración se muestra en la figura 1.2.
Interruptor Automático
Red Electnca
Inversor T Rectificador
Cargador
Figura 1.2 Configuración de un SAi en línea.
SAI fuera de línea
En la configuración fuera de línea, la red eléctrica alimenta a la carga en condiciones normales de operación y solo ante una falla el interruptor transfiere la alimentación de la carga al SAL Posteriormente, cuando se restablece el suministro de energía el rectificador- cargador recarga las baterías y el interruptor transfiere nuevamente, la alimentación de la carga a la red eléctrica. Esta configuración se muestra en la figura 1.3.
r
1 Inversor Rectificador
Cargador T
Figura 1.3 Configuración de un SAi fuera de línea.
Introducción Capitulo 1
1.2 SISTEMAS FOTOVOLTAICOS
Los SF constituyen una fuente alternativa de energía, que a diferencia de la energía nuclear y los combustibles fósiles (carbón, gas natural y petróleo), no contamina ni genera desperdicios tóxicos, además de tener un menor impacto ecológico. Entre las principales ventajas que ofrecen estos sistemas respecto a las fuentes de energía actuales se encuentran las siguientes [2]:
No contaminan. No requieren partes móviles. Prácticamente son libres de mantenimiento. Permiten la generación de energía eléctrica en forma descentralizada. No requieren altos niveles de seguridad.
Además, los SF son una alternativa para generar energía en lugares y aplicaciones donde no es accesible la red de energía eléctrica. Por ejemplo, casas en lugares apartados como islas o regiones montañosas, estaciones repetidoras de radio, casas móviles, casetas telefónicas en autopistas, estaciones meteorológicas, satélites, etc. El funcionamiento de los SF es sencillo y consiste en generar energía eléctrica empleando como fuente primaria de energía la luz irradiada por el sol [2].
Clasificando estos sistemas de acuerdo con la comente que entregan a la carga, existen únicamente dos tipos de SF: en CA y CD. Debido a que la mayoría del equipo eléctrico y electrónico se fabrica convencionalmente para operar con CA, los SF con salida en CA son los mas utilizados. Los SF con salida en CD tienen un rango limitado de aplicaciones ya que solo pueden alimentar equipos diseñados especialmente para funcionar con niveles de CD. Para los objetivos del presente trabajo solo resultan de interés los-SF en CA, razón por la cual solo se describe este tipo de sistemas.
1.2.1 Etapas de un SF en CA
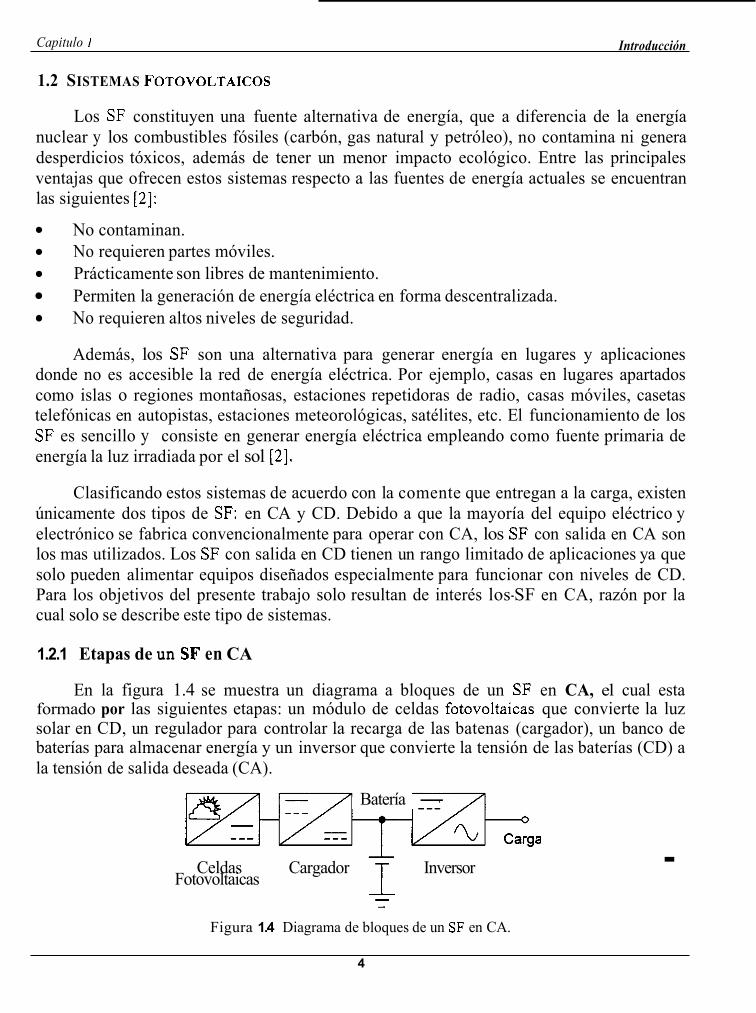
En la figura 1.4 se muestra un diagrama a bloques de un SF en CA, el cual esta formado por las siguientes etapas: un módulo de celdas fotovolíaicas que convierte la luz solar en CD, un regulador para controlar la recarga de las batenas (cargador), un banco de baterías para almacenar energía y un inversor que convierte la tensión de las baterías (CD) a la tensión de salida deseada (CA).
Batería - _ _ _
Celdas Cargador I Inversor Fotovoltaicas - -
Figura 1.4 Diagrama de bloques de un SF en CA.
.
4
. .
Cuando hay incidencia solar, el módulo de celdas fotovoltaicas convierte la energía solar en CD, que el regulador limita a un valor adecuado para recargar las baterías y a la vez suministra al inversor la comente necesaria para alimentar a la carga. Cuando no hay incidencia solar, el banco de baterías proporciona al inversor la energía necesaria para alimentar a la carga y a la vez el regulador de carga evita que fluya comente de las batenas hacia el módulo de celdas fotovoltaicas.
1.2.2 Configuraciones de los SF en CA
Unicamente existen dos configuraciones para los SF en CA: el aislado y el conectado a la red eléctrica.
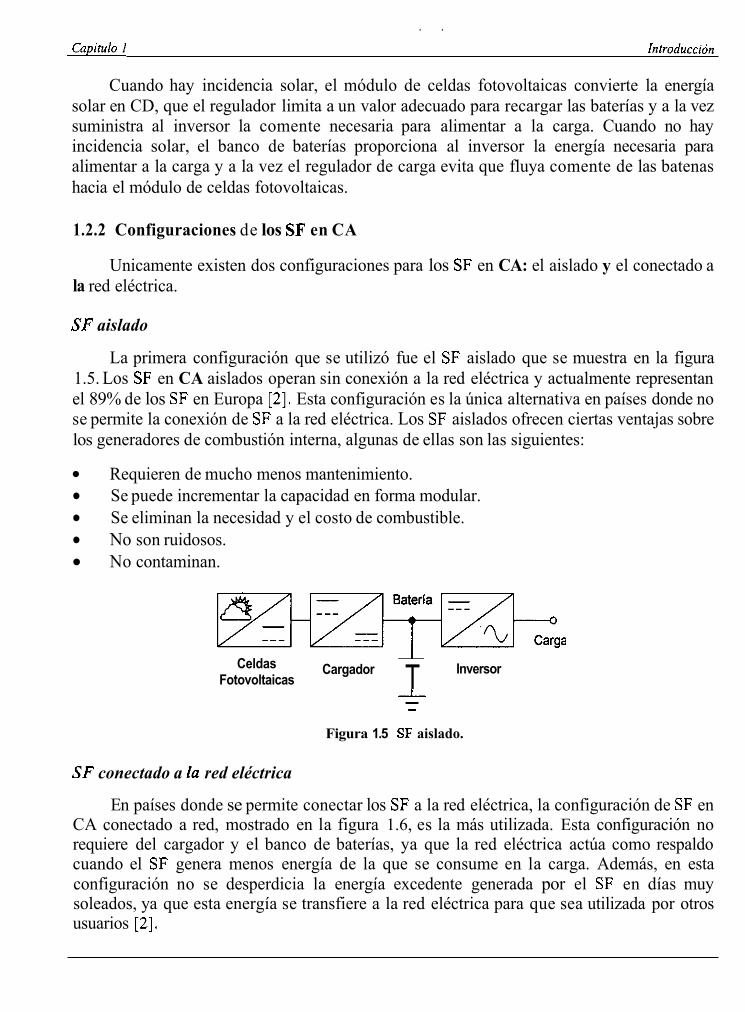
SF aislado
La primera configuración que se utilizó fue el SF aislado que se muestra en la figura 1.5. Los SF en CA aislados operan sin conexión a la red eléctrica y actualmente representan el 89% de los SF en Europa [2]. Esta configuración es la única alternativa en países donde no se permite la conexión de SF a la red eléctrica. Los SF aislados ofrecen ciertas ventajas sobre los generadores de combustión interna, algunas de ellas son las siguientes:
No son ruidosos. No contaminan.
Requieren de mucho menos mantenimiento. Se puede incrementar la capacidad en forma modular. Se eliminan la necesidad y el costo de combustible.
Inversor T Cargador Celdas Fotovoltaicas
A - - Figura 1.5 SF aislado.
SF conectado a ia red eléctrica
En países donde se permite conectar los SF a la red eléctrica, la configuración de SF en CA conectado a red, mostrado en la figura 1.6, es la más utilizada. Esta configuración no requiere del cargador y el banco de baterías, ya que la red eléctrica actúa como respaldo cuando el SF genera menos energía de la que se consume en la carga. Además, en esta configuración no se desperdicia la energía excedente generada por el SF en días muy soleados, ya que esta energía se transfiere a la red eléctrica para que sea utilizada por otros usuarios [2].

Eléctrica Red 0 Capacitores
Carga Inversor Celdas
Fotovoltaicas - -
Figura 1.6 SF conectado a la red eléctrica.
1.3 PROBLEMÁTICA EN LA ETAPA INVERSORA
Tanto en los SA1 como en los SF, independientemente de la configuración, existe una etapa inversora que en ambos sistemas desempeña las mismas funciones que se pueden resumir de la siguiente manera: elevar e invertir la tensión de las baterías generalmente baja, y generar una tensión de salida con especificaciones similares a la red eléctrica.
1.3.1 Eficiencia
En algunas aplicaciones de SAI y SF donde la tensión de batenas es relativamente baja (típicamente entre 12 y 48 volts), la etapa inversora debe ser capaz de elevar tensión, además de realizar la conversión de CD a CA, ya que se deben obtener tensiones de salida con valores instantáneos de hasta 170 V (tensión pico de la red eléctrica). La forma en que se consigue la inversión y elevación, en este tipo de aplicaciones, generalmente consiste en utilizar dos etapas conectadas en cascada, donde una etapa realiza el proceso de inversión (CD-CA) y la otra eleva tensión ya sea de CD o CA.
Existe un gran número de alternativas para construir la etapa inversora, sin embargo la mayona de ellas difieren solo en la etapa elevadora. Por lo tanto es posible clasificarlas en dos grandes grupos, dependiendo de la forma en que elevan la tensión: el primero de ellos io forman soluciones que emplean un transformador de baja frecuencia y el segundo esta constituido por soluciones que emplean un convertidor CD-CD. En la figura 1.7 se muestra cada una de estas soluciones.
El tener dos etapas en cascada representa una desventaja ya que reduce la eficiencia de la etapa inversora. En cualquier sistema se desea tener buena eficiencia, sin embargo en los SA1 o SF este parámetro cobra mayor importancia, dado que la capacidad de suministro de energía (amperes-hora) del sistema depende en gran medida de la eficiencia en la etapa inversora.
- - - _-
Entrada 2/
(a) (b)
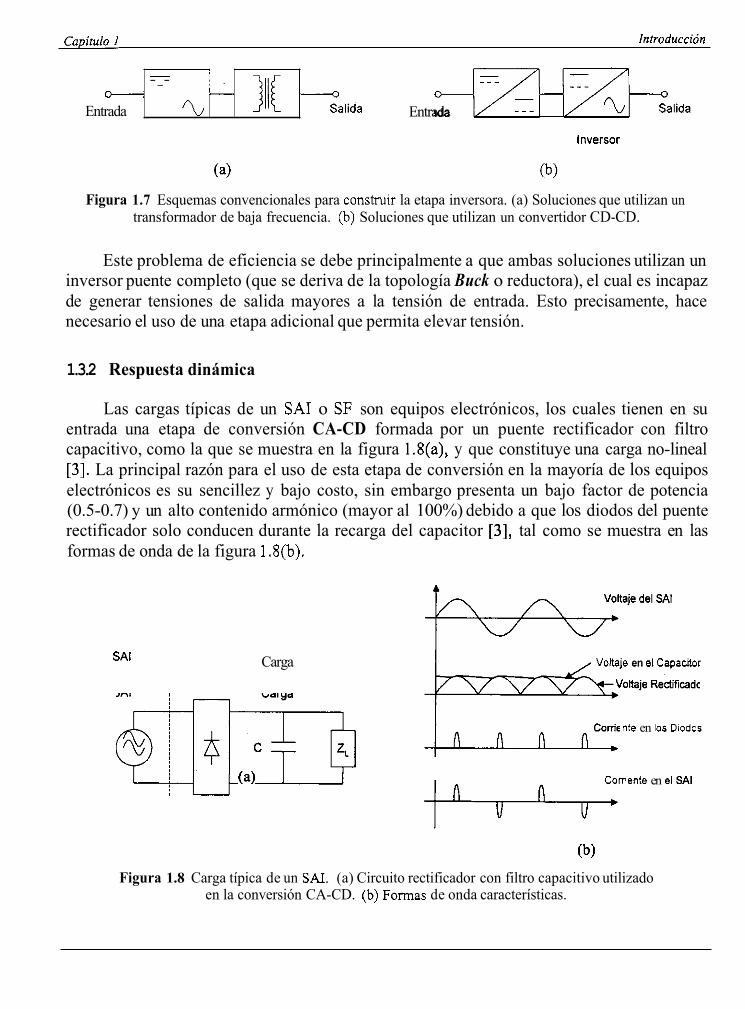
Figura 1.7 Esquemas convencionales para consiruir la etapa inversora. (a) Soluciones que utilizan un transformador de baja frecuencia. @) Soluciones que utilizan un convertidor CD-CD.
*alida Entrada ' ]Ii[ T a l i d a
Este problema de eficiencia se debe principalmente a que ambas soluciones utilizan un inversor puente completo (que se deriva de la topología Buck o reductora), el cual es incapaz de generar tensiones de salida mayores a la tensión de entrada. Esto precisamente, hace necesario el uso de una etapa adicional que permita elevar tensión.
1.3.2 Respuesta dinámica
Las cargas típicas de un SA1 o SF son equipos electrónicos, los cuales tienen en su entrada una etapa de conversión CA-CD formada por un puente rectificador con filtro capacitivo, como la que se muestra en la figura 1.8(a), y que constituye una carga no-lineal [3]. La principal razón para el uso de esta etapa de conversión en la mayoría de los equipos electrónicos es su sencillez y bajo costo, sin embargo presenta un bajo factor de potencia (0.5-0.7) y un alto contenido armónico (mayor al 100%) debido a que los diodos del puente rectificador solo conducen durante la recarga del capacitor [3], tal como se muestra en las formas de onda de la figura 1.8(b).
Carga Vonaje en e1 Capautor SA1
$---[---q@ TJ nte en los Diodos
(4 Comente en e1 SA1
(b) Figura 1.8 Carga típica de un S A I . (a) Circuito rectificador con filtro capacitivo utilizado
en la conversión CA-CD. @)Formas de onda características.

fnfroduccion Capiiulo I
Durante la recarga del capacitor se demanda una gran cantidad de energía a la fuente de CD, por lo que pueden presentarse problemas como el incremento de la distorsión armónica total (THD por sus siglas en inglés) [4]. Dado que la respuesta dinámica en la etapa inversora es uno de los principales factores que determinan la calidad de un SA1 es necesario utilizar una estrategia capaz de proporcionar rápida respuesta dinámica para compensar la distorsión producida por carga no lineal.
1.4 ESTADO DEL ARTE
La revisión del estado del arte, descrita a continuación, comprende aquellas soluciones que mejoran algún aspecto de la problemática en la etapa inversora, es decir la eficiencia y la respuesta dinámica. También se han incluido soluciones que no mejoran ningún aspecto de la problemática y solo constituyen una alternativa, ya sea para construir la etapa inversora, o bien para desarrollár su control.
1.4.1 Soluciones que emplean un transformador de baja frecuencia
En una revisión sobre la tecnología de los SAI, realizada por G. Hicks en 1992 [ 5 ] , se presentan las soluciones utilizadas convencionalmente para construir la etapa inversora de un SAI. Estas soluciones se pueden clasificar, por la forma en que elevan tensión, en dos grandes grupos: el primero de ellos emplea un transformador de baja frecuencia, y el segundo utiliza un convertidor CD-CD. A continuación se describen las soluciones que pertenecen al primer grupo y en la siguiente sección se describirán las soluciones correspondientes al segundo grupo.
En la tabla 1.1 se muestran los circuitos simplificados de las soluciones que emplean un transformador de baja frecuencia, así como la forma de onda en tensión a la salida del inversor. Todas estas soluciones emplean inversores puente completo para realizar la conversión de CD-CA, un transformador de baja frecuencia para elevar la tensión a la salida del inversor y finalmente un filtro pasabajas para extraer la componente fundamental. El tamaño de este filtro depende del contenido armónico en la forma de onda a su entrada, entre menor sea el contenido armónico, menor será su tamaño.
En cada una de estas soluciones, el inversor trata de aproximar la tensión que genera a una onda senoidal con el menor contenido armónico posible para reducir el tamaño, volumen y peso del filtro de salida. Aunque algunas de estas soluciones consiguen generar formas de onda con bajo contenido armónico, tal es el caso de la onda escalonada y la modulada en anchura de pulso, aún presentan el inconveniente en peso y volumen del transformador de baja frecuencia.
Es importante señalar que todas estas soluciones no fueron concebidas como una alternativa para resolver la problemática en la etapa inversora, sino que solo son alternativas para construirla. Gracias al transformador de baja frecuencia, estas soluciones tienen como principal ventaja el aislamiento galvánico entre entrada y salida
8

Capitulo I Introducción
Tabla 1.1 Soluciones que emplean un transformador de baja frecuencia
~~~
Solución
Onda cuadrada
Onda cuasi cuadrada
Onda escalonada
Onda modulada en anchura de pulso
Circuito Simplificado
I""WS0,
Tensión a la salida del inversor
tt-.
I
1.4.2 Soluciones que emplean un convertidor CD-CD
Las soluciones que emplean un convertidor CD-CD también se describen en la revisión realizada por G. Hicks [ 5 ] y surgieron como una opción para reducir el peso y volumen de las soluciones descritas en la sección anterior, io cual se logra reemplazando el transformador de baja frecuencia por un convertidor CD-CD. Además conservan la técnica de modulación por anchura de pulso, de esta manera se consigue reducir significativamente el tamaño del filtro de salida.
En la tabla 1.2 se muestran los circuitos simplificados de las soluciones que emplean un convertidor CD-CD, así como la forma de onda en tensión a la salida del inversor.
Estas dos soluciones cuentan con un filtro de salida pequeño debido a que utilizan la técnica de modulación por anchura de pulso y Únicamente difieren en el convertidor que utilizan para elevar la tensión de entrada.
9
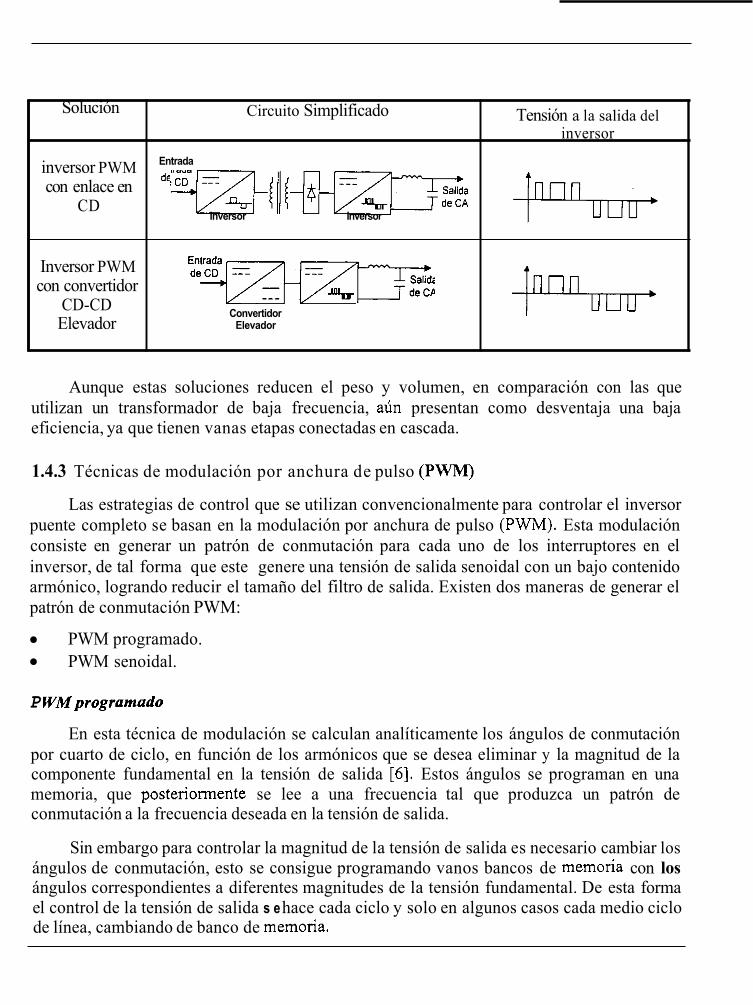
Solución
inversor PWM con enlace en
CD
Inversor PWM con convertidor
CD-CD Elevador
Aunque estas soluciones reducen el peso y volumen, en comparación con las que utilizan un transformador de baja frecuencia, aún presentan como desventaja una baja eficiencia, ya que tienen vanas etapas conectadas en cascada.
Circuito Simplificado Tensión a la salida del inversor
Entrada deCD -7 *l#mk -*
Inversor Inversor
Convertidor Elevador
1.4.3 Técnicas de modulación por anchura de pulso (PWM)
Las estrategias de control que se utilizan convencionalmente para controlar el inversor puente completo se basan en la modulación por anchura de pulso (PWM). Esta modulación consiste en generar un patrón de conmutación para cada uno de los interruptores en el inversor, de tal forma que este genere una tensión de salida senoidal con un bajo contenido armónico, logrando reducir el tamaño del filtro de salida. Existen dos maneras de generar el patrón de conmutación PWM:
PWM programado. PWM senoidal.
P WMprogramado
En esta técnica de modulación se calculan analíticamente los ángulos de conmutación por cuarto de ciclo, en función de los armónicos que se desea eliminar y la magnitud de la componente fundamental en la tensión de salida [6 ] . Estos ángulos se programan en una memoria, que postenomente se lee a una frecuencia tal que produzca un patrón de conmutación a la frecuencia deseada en la tensión de salida.
Sin embargo para controlar la magnitud de la tensión de salida es necesario cambiar los ángulos de conmutación, esto se consigue programando vanos bancos de memoria con los ángulos correspondientes a diferentes magnitudes de la tensión fundamental. De esta forma el control de la tensión de salida s e hace cada ciclo y solo en algunos casos cada medio ciclo de línea, cambiando de banco de memona.

Capíiulo I inlroduccion
AI utilizar el PWM programado no se pueden compensar variaciones que ocurren en intervalos de tiempo muy pequeños, como las que provoca una carga no-lineal (generalmente menores a medio ciclo de línea), debido precisamente a que el control de la tensión de salida solo puede hacerse, en el mejor de los casos, cada medio ciclo de línea. En esta técnica, el principio de modulación y la regulación de la tensión de salida están estrechamente relacionados y no es posible realizar la regulación de otra manera.
P WM senoidal
En el PWM senoidal [7,8] se genera el patrón de conmutación comparando una señal de referencia senoidal a la frecuencia de salida deseada contra una portadora triangular en alta frecuencia, como se muestra en la figura 1 .S(a).
Existen algunas variantes en esta técnica de modulación que tienen como finalidad obtener mayor amplitud en la componente fundamental y reducir el contenido armónico en la tensión de salida. Dentro de estas variantes se encuentran el PWM senoidal modificado, el cual consiste en cambiar la forma de la portadora triangular (figura 1.9(b)) y el PWM con inyección de armónicos, en el cual se agregan ciertos armónicos a la señal de referencia (figura i.S(c)).
@) (c)
Figura 1.9 Señal de referencia y portadora para: (a) PWM senoidal. @) PWM senoidal modificado. (c) PWM senoidal con inyección de armónicos.
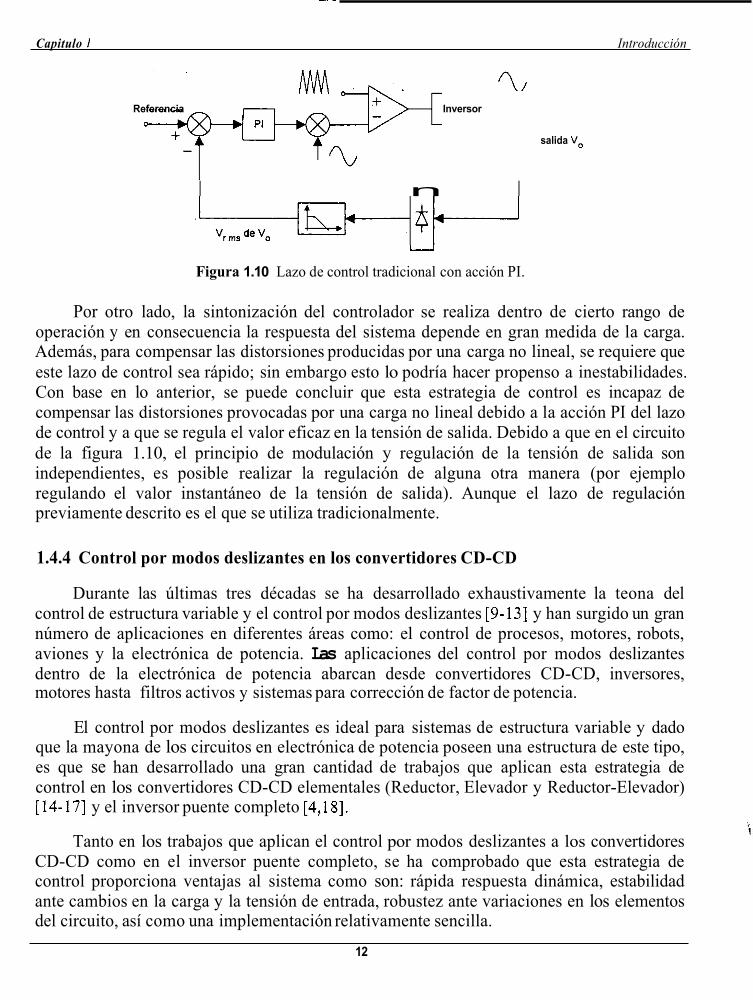
La desventaja de esta técnica no radica en el principio de modulación, sino en que tradicionalmente se utiliza un lazo de control, con una acción PI (Proporcional Integral), que regula el valor eficaz de la tensión de salida, sin cuantificar su distorsión (figura 1.10). E O O - 0 4 0 4
11
~~
Capitulo I Introducción
1 1 1 1 1
Referencia Inversor
salida Vo
I n I
u
Figura 1.10 Lazo de control tradicional con acción PI.
Por otro lado, la sintonización del controlador se realiza dentro de cierto rango de operación y en consecuencia la respuesta del sistema depende en gran medida de la carga. Además, para compensar las distorsiones producidas por una carga no lineal, se requiere que este lazo de control sea rápido; sin embargo esto lo podría hacer propenso a inestabilidades. Con base en lo anterior, se puede concluir que esta estrategia de control es incapaz de compensar las distorsiones provocadas por una carga no lineal debido a la acción PI del lazo de control y a que se regula el valor eficaz en la tensión de salida. Debido a que en el circuito de la figura 1.10, el principio de modulación y regulación de la tensión de salida son independientes, es posible realizar la regulación de alguna otra manera (por ejemplo regulando el valor instantáneo de la tensión de salida). Aunque el lazo de regulación previamente descrito es el que se utiliza tradicionalmente.
1.4.4 Control por modos deslizantes en los convertidores CD-CD
Durante las últimas tres décadas se ha desarrollado exhaustivamente la teona del control de estructura variable y el control por modos deslizantes [9-131 y han surgido un gran número de aplicaciones en diferentes áreas como: el control de procesos, motores, robots, aviones y la electrónica de potencia. Las aplicaciones del control por modos deslizantes dentro de la electrónica de potencia abarcan desde convertidores CD-CD, inversores, motores hasta filtros activos y sistemas para corrección de factor de potencia.
El control por modos deslizantes es ideal para sistemas de estructura variable y dado que la mayona de los circuitos en electrónica de potencia poseen una estructura de este tipo, es que se han desarrollado una gran cantidad de trabajos que aplican esta estrategia de control en los convertidores CD-CD elementales (Reductor, Elevador y Reductor-Elevador) 114-171 y el inversor puente completo [4,18].
Tanto en los trabajos que aplican el control por modos deslizantes a los convertidores CD-CD como en el inversor puente completo, se ha comprobado que esta estrategia de control proporciona ventajas al sistema como son: rápida respuesta dinámica, estabilidad ante cambios en la carga y la tensión de entrada, robustez ante variaciones en los elementos del circuito, así como una implementación relativamente sencilla.
12
Capitulo I Introducción . . . .
En 141 y [I8] se aplica control por modos deslizantes al inversor puente completo, y . gracias a esta estrategia de control se obtienen muy buenos resultados en cuanto a respuesta dinámica se refiere, especialmente ante carga no iineai. Sin embargo [41 y
Solo un aspect0 de la problemática en la etapa inversora de un SAI o SF: la respuesta dinámica. Y debido a que utilizan un inversor puente completo, el cual es
de elevar tensión, Siguen presentando baja eficiencia ya que requieren de una etapa adicional que eleve tensión en CD 0 CA.
que
En conclusión, a pesar del problema de la eficiencia, la rápida respuesta dinámica ante carga no lineal obtenida en [4] y [is], además de todas las ventajas que proporciona el control por modos deslizantes, hacen de esta estrategia de control una buena alternativa para mejorar la respuesta dinámica en la etapa inversora de un SA1 O SE
1.4.5 Inversores con capacidad de elevación
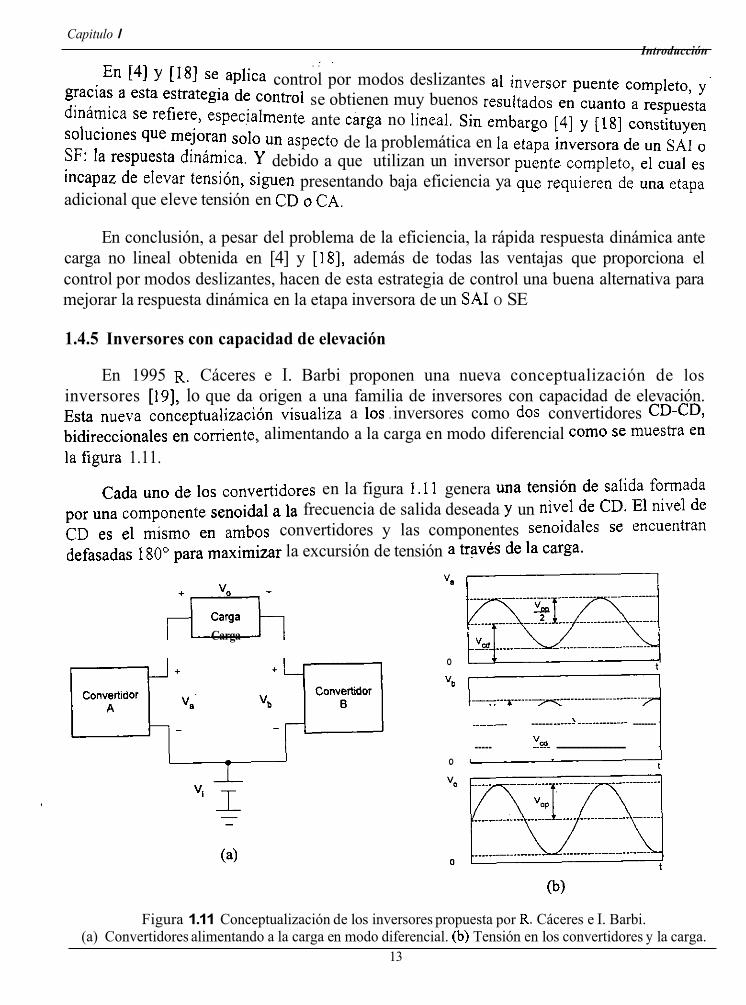
En 1995 R. Cáceres e I. Barbi proponen una nueva conceptualización de los inversores [ 191, lo que da origen a una familia de inversores con capacidad de elevación. ~~b nueva conceptualización visualiza a los . inversores como dos convertidores CD-CD, bidireccionales en comente, alimentando a la carga en modo diferencial como se muestra en lafigura 1.11.
Cada uno de los convertidores en la figura 1.11 genera Una tensión de salida formada por una componente senoidal a la frecuencia de salida deseada y un nivel de CD. El nivel de CD es el mismo en ambos convertidores y las componentes senoidales se encuentran defasadas 1800 para maximizar la excursión de tensión a traves de la carga.
va - rih Carga
O
Vb ;-, i I
...... ........
..... !s. ............................ O
(4 @)
Figura 1.11 Conceptualización de los inversores propuesta por R. Cáceres e I. Barbi. (a) Convertidores alimentando a la carga en modo diferencial. @) Tensión en los convertidores y la carga.
13

Introducción Copirulo /
Es posible mostrar que, el inversor puente completo se puede concebir de esta manera. Conectando dos convertidores Reductores, bidireccionales en comente, en forma diferencial con la carga se obtiene el inversor puente completo con filtro pasabajos de la figura 1.12 O inversor Reductor, denominado así por derivarse de convertidores Reductores.
Figura 1.12 Inversor Reductor.
Y de la misma forma en que se obtuvo el inversor puente completo o inversor Reductor se obtienen los inversores Elevadores, sólo basta utilizar convertidores CD-CD con capacidad de elevación en vez del convertidor Reductor.
A finales de 1995 R. Cáceres e I. Barbi desarrollaron un inversor a partir de convertidores CD-CD Elevadores: el inversor Elevador [20,2 11. Este inversor Elevador permite invertir y elevar tensión en una sola etapa lo cual representa una muy buena opción para mejorar la eficiencia y volumen en la etapa inversora de un SA1 y SF. Sin embargo, aunque el inversor Elevador resuelve el problema de baja eficiencia en la etapa inversora de los SA1 y SF, no poseen rápida respuesta dinámica debido a que utilizan una estrategia de control basada en las técnicas de modulación por anchura de pulso tradicionales.
1.4.6 Inversor Elevador controlado por modos deslizantes
En 1997 N. Vázquez conjunta los esfuerzos que se habían realizado para solucionar los diferentes aspectos que forman la problemática en la etapa inversora de los SA1 y SF, al proponer el inversor Elevador como una alternativa para construir la etapa inversora y utilizar una estrategia de control por modos deslizantes para su control [22].
Como se mencionó en la sección anterior, el inversor Elevador mostrado en la figura 1.13, se obtiene a partir de dos convertidores Elevadores, bidireccionales en comente conectados en forma diferencial con la carga.
El inversor Elevador de la figura 1.13, mejora la eficiencia en la etapa inversora de los SA1 y SF ya que permite elevar e invertir tensión en una sola etapa. Además, gracias a la estrategia de control por modos deslizantes se logra rápida respuesta dinámica ante cambios de carga, especialmente ante carga no lineal.

: - 7
Capitulo I Introducción
d Figura 1.13 Inversor Elevador
Aunque el inversor propuesto por N. Vázquez [22] resuelve ambos aspectos de la problemática en la etapa inversora, en cuanto a eficiencia y respuesta dinámica se refiere, este inversor presenta como principal desventaja los elevados esfuerzos en comente a través de los semiconductores.
Por otro lado, el inversor Elevador solo es un miembro de una familia de inversores con capacidad de elevación, por lo que construir la etapa inversora con algún otro miembro de esta familia y determinar cual de ellos tiene las mejores prestaciones representa una alternativa interesante.
1.5 SOLUCIÓN PROPUESTA
El tratar de reducir los esfuerzos en comente a través de los semiconductores, motivó a buscar otra solución a la problemática en la etapa inversora, que conserve las ventajas del inversor Elevador, buena eficiencia y rápida respuesta dinámica, pero que a la vez presente menores esfuerzos en comente.
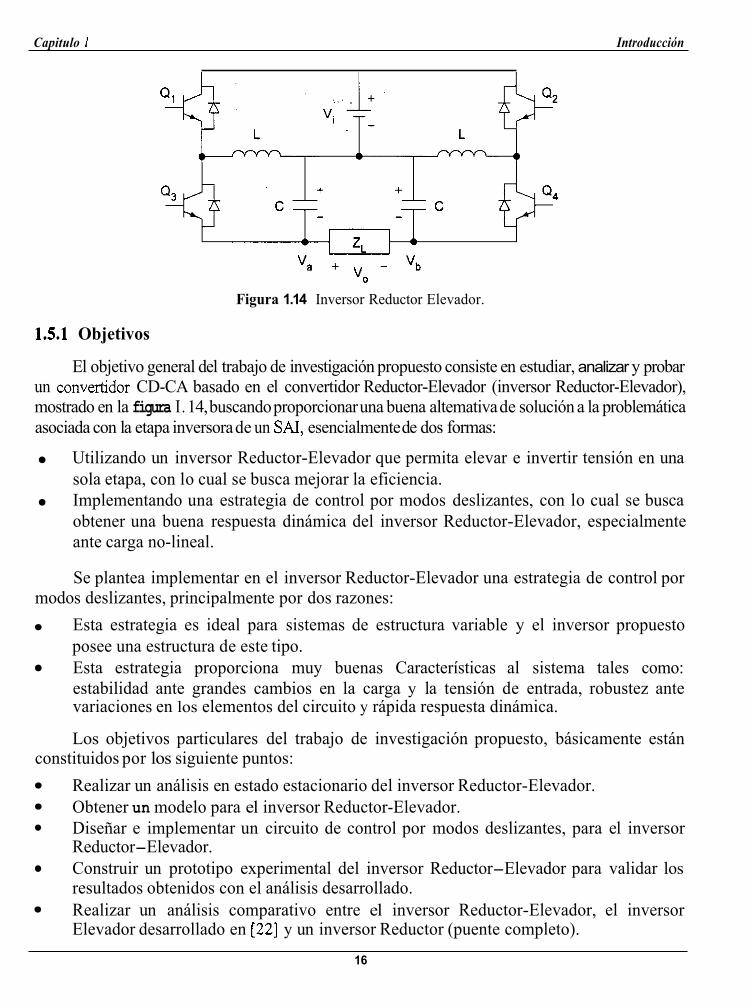
La hipótesis de que los elevados esfuerzos en comente del inversor Elevador, podrian ser una consecuencia directa de la incapacidad del convertidor Elevador para generar tensiones de salida menores a la tensión de entrada, da origen a la idea de estudiar un inversor derivado de convertidores que sean capaces de generar tensiones de salida mayores y menores a la tensión de entrada: convertidores Reductores-Elevadores. La estructura que resulta se muestra en la figura 1.14 y se denomina inversor Reductor-Elevador; se obtiene de forma similar a como se obtuvieron los inversores Reductor y Elevador en las secciones 1.4.5 y 1.4.6 respectivamente.
Capitulo I Introducción
Figura 1.14 Inversor Reductor Elevador.
1.5.1 Objetivos
El objetivo general del trabajo de investigación propuesto consiste en estudiar, analizar y probar un converiidor CD-CA basado en el convertidor Reductor-Elevador (inversor Reductor-Elevador), mostrado en la figura I. 14, buscando proporcionar una buena altemativa de solución a la problemática asociada con la etapa inversora de un SAi, esencialmente de dos formas:
Utilizando un inversor Reductor-Elevador que permita elevar e invertir tensión en una sola etapa, con lo cual se busca mejorar la eficiencia. Implementando una estrategia de control por modos deslizantes, con lo cual se busca obtener una buena respuesta dinámica del inversor Reductor-Elevador, especialmente ante carga no-lineal.
Se plantea implementar en el inversor Reductor-Elevador una estrategia de control por modos deslizantes, principalmente por dos razones:
Esta estrategia es ideal para sistemas de estructura variable y el inversor propuesto posee una estructura de este tipo. Esta estrategia proporciona muy buenas Características al sistema tales como: estabilidad ante grandes cambios en la carga y la tensión de entrada, robustez ante variaciones en los elementos del circuito y rápida respuesta dinámica.
Los objetivos particulares del trabajo de investigación propuesto, básicamente están
Realizar un análisis en estado estacionario del inversor Reductor-Elevador. Obtener un modelo para el inversor Reductor-Elevador. Diseñar e implementar un circuito de control por modos deslizantes, para el inversor Reductor-Elevador. Construir un prototipo experimental del inversor Reductor-Elevador para validar los resultados obtenidos con el análisis desarrollado. Realizar un análisis comparativo entre el inversor Reductor-Elevador, el inversor Elevador desarrollado en [22] y un inversor Reductor (puente completo).
constituidos por los siguiente puntos:
16
CAPITULO 2
EL INVERSOR REDUCTOR-ELEVADOR
En este capítulo se aborda el análisis del inversor Reductor-Elevador de una manera detallada, estableciendo una base para realizar el diseño de un prototipo. Se describe en forma sencilla la teoría básica del control por modos deslizantes empleando algunos ejemplos y se realiza de manera sistemática el diseño del controlador. Finalmente se muestran algunos resultados en simulación y experimentales del inversor Reductor-Elevador que validan el análisis desarrollado.
2.1 ANALISIS DEL INVERSOR
El inversor Reductor-Elevador esta formado por dos convertidores CD-CD del tipo Reductor-Elevador, bidireccionales en corriente, alimentando a la carga en modo diferencial (figura 2.1(a)). Cada convertidor genera una tensión formada por un nivel de CD (V,) y una componente senoidal a la frecuencia deseada en la tensión de salida (figura 2.1(b)). La componente senoidal de uno de los convertidores esta defasada 180" con respecto al otro convertidor, para maximizar la excursión de tensión a través de la carga. Los convertidores operan en modo de conducción continua y se controlan de manera independiente, es decir las señales de disparo para ambos convertidores se generan de forma independiente.
17

Capitulo 2 El inversor Reductor-Elevador
v a
Convedidor Reductor Elevador v a 'b
A - -
Convertidor Reductor Elevador
B
O
'b
O
vo
O
................................................
................. 2.. ...........................
................................................
1
................................................
...... 2.. ......................................
................................................
1
Figura 2.1 El inversor Reductor-Elevador (a) Convertidores Reductores-Elevadores alimentando a la carga en modo diferencial (b) Tensiones en los convertidores y tensión de salida.
La tensión de salida en los convertidores A y B (figura 2.l(b)) está definida, respectivamente, por:
VOP Va = VCd + - S e n a 2
Vj, = v,d + -Sen(& VOP - T ) 2
donde: Vop =Valor pico de la tensión de salida. Vcd =Valor de la componente de CD.
Debido a que la carga está conectada en modo diferencial, la tensión de salida en el
(2.3)
La componente de CD que genera cada convertidor (Ved) esta dada por la siguiente
inversor es V, = Va - V, = Vop . Sen(&)
expresión:
VOP (2.4) = vh '1

donde: vh = k . vop Vh = Voltaje de holgura. k = Factor de holgura.
(2.5)
Es importante notar que teóricamente existe un valor mínimo en el V, que genera cada convertidor para el funcionamiento del inversor. Aunque es recomendable aumentarlo con cierto voltaje de holgura (VJ para asegurar la operación adecuada del inversor [22]. De la figura 2.l(b) se puede ver que este valor mínimo esta dado por la siguiente ecuación:
Defiendo la ganancia máxima del inversor (G,), como el factor de elevación necesario para alcanzar la tensión de salida pico (V,) a partir de cierto voltaje de entrada (t'.).
VOP G, =- vi
Es posible expresar el V,en términos de la ganancia máxima mediante la ecuación 2.8, esta ecuación será de mucha utilidad en las siguientes secciones.
2.1.1 Ganancia
forman. En la figura 2.2 se muesba un convertidor Reductor-Elevador unidireccional en corriente. Para obtener la ganancia del inversor se parte del anáiisis de uno de los convertidores que lo
I I I I Figura 2.2 Convertidor Reductor-Elevador.
De las ecuaciones básicas que describen el comportamiento en modo de conducción continuo del convertidor de la figura 2.2, se conoce que [23]:
I L _ 1 (2.10) I , 1-D
donde: D= Ciclo de trabajo 19
Capitulo 2 El inversor Reductor-Elevador
Puesto que las componentes senoidales de los convertidores A y B están defasadas 180' una respecto a otra y el V, es el mismo, la tensión de salida del inversor es:
vo = 2va - 2vc, (2.1 1)
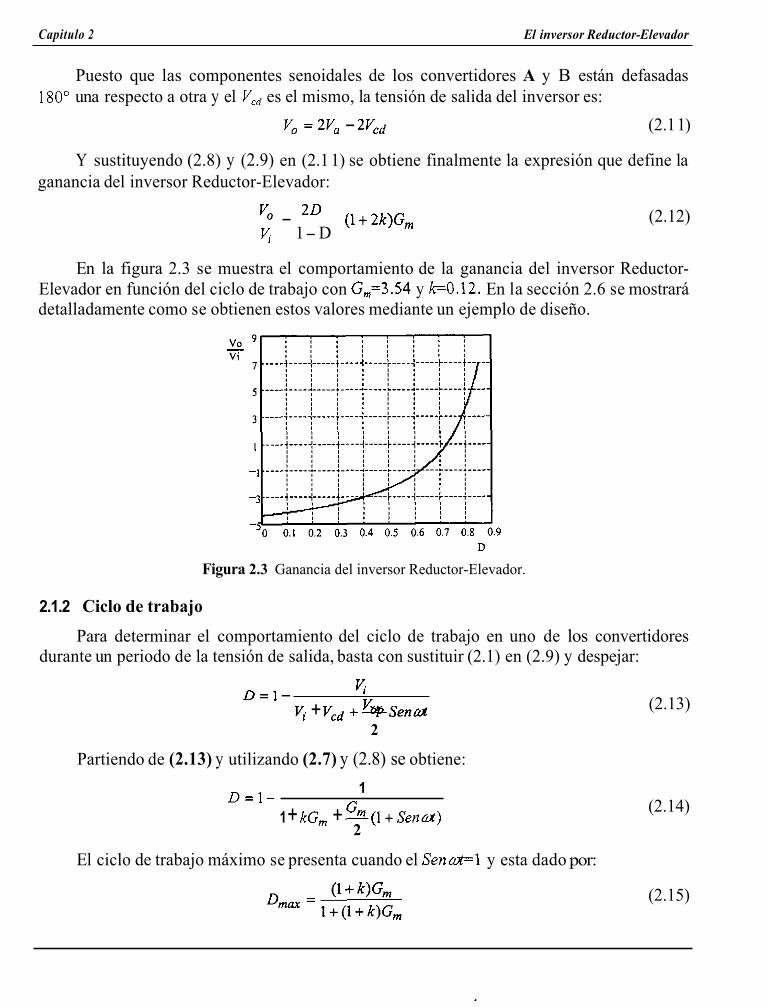
Y sustituyendo (2.8) y (2.9) en (2.1 1) se obtiene finalmente la expresión que define la ganancia del inversor Reductor-Elevador:
'0 - 2D (1+2k)Gm V, 1-D
(2.12)
En la figura 2.3 se muestra el comportamiento de la ganancia del inversor Reductor- Elevador en función del ciclo de trabajo con G,=3.54 y k0.12. En la sección 2.6 se mostrará detalladamente como se obtienen estos valores mediante un ejemplo de diseño.
D
Figura 2.3 Ganancia del inversor Reductor-Elevador.
2.1.2 Ciclo de trabajo
durante un periodo de la tensión de salida, basta con sustituir (2.1) en (2.9) y despejar: Para determinar el comportamiento del ciclo de trabajo en uno de los convertidores
vi D = 1 - V, + vCd + - S e n a VOP
2
Partiendo de (2.13) y utilizando (2.7) y (2.8) se obtiene: 1
1 + kG, + %(1+ S e n a ) 2
D = 1 -
El ciclo de trabajo máximo se presenta cuando el Sen@-1 y esta dado por:
(2.13)
(2.14)
(2.15)

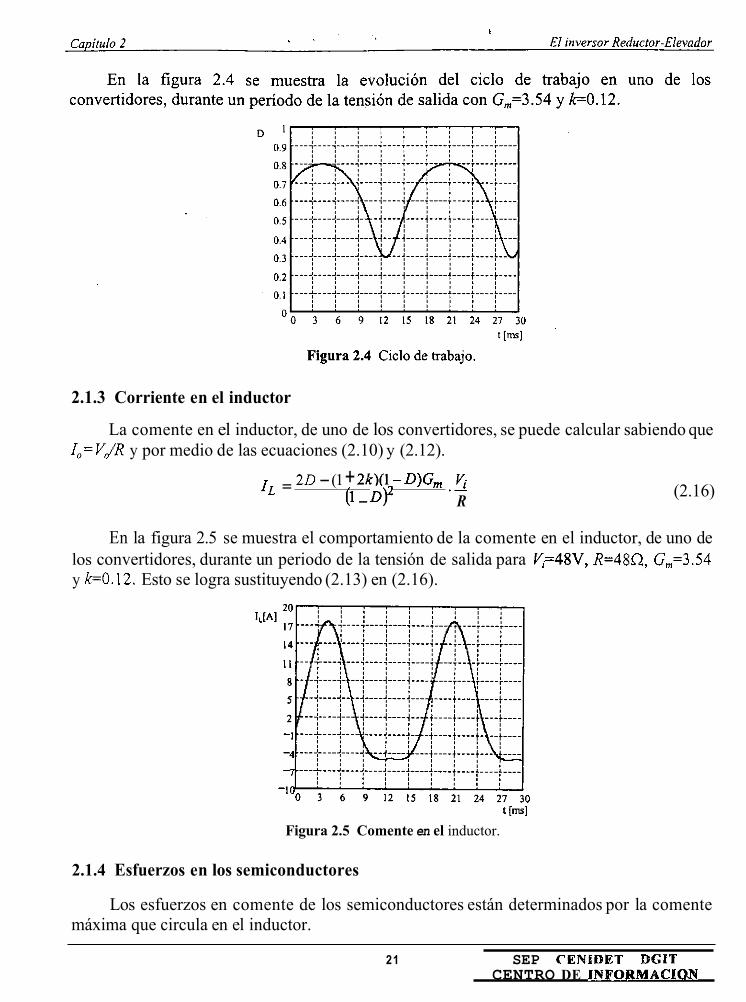
2.1.3 Corriente en el inductor
La comente en el inductor, de uno de los convertidores, se puede calcular sabiendo que I,=VJR y por medio de las ecuaciones (2.10) y (2.12).
(2.16)
En la figura 2.5 se muestra el comportamiento de la corriente en el inductor, de uno de los convertidores, durante un periodo de la tensión de salida para J'.=48V, R=48R, Gm=3.54 y k0.12. Esto se logra sustituyendo (2.13) en (2.16).
b-1 Figura 2.5 Comente en el inductor.
2.1.4 Esfuerzos en los semiconductores
Los esfuerzos en comente de los semiconductores están determinados por la comente máxima que circula en el inductor.
21 SEP CENiDET DGlT CENTRO DE 1NIQRMACK)N
Capitulo 2 Ei inversor Reductor-Elevador
2.1.5 Cálculo del inductor
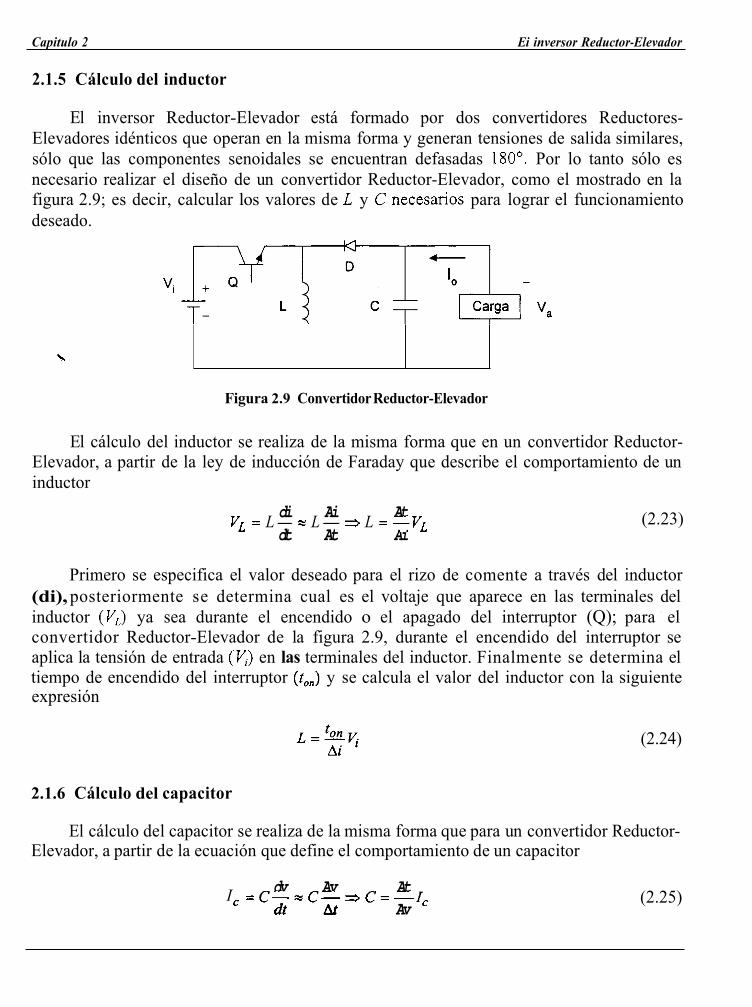
El inversor Reductor-Elevador está formado por dos convertidores Reductores- Elevadores idénticos que operan en la misma forma y generan tensiones de salida similares, sólo que las componentes senoidales se encuentran defasadas 180'. Por lo tanto sólo es necesario realizar el diseño de un convertidor Reductor-Elevador, como el mostrado en la figura 2.9; es decir, calcular los valores de L y C necesarios para lograr el funcionamiento deseado.
Figura 2.9 Convertidor Reductor-Elevador
El cálculo del inductor se realiza de la misma forma que en un convertidor Reductor- Elevador, a partir de la ley de inducción de Faraday que describe el comportamiento de un inductor
di Ai At dt At Ai
v, = L- = L- * L = -vr. (2.23)
Primero se especifica el valor deseado para el rizo de comente a través del inductor (di), posteriormente se determina cual es el voltaje que aparece en las terminales del inductor (V,) ya sea durante el encendido o el apagado del interruptor (Q); para ' el convertidor Reductor-Elevador de la figura 2.9, durante el encendido del interruptor se aplica la tensión de entrada (F'J en las terminales del inductor. Finalmente se determina el tiempo de encendido del interruptor (ton) y se calcula el valor del inductor con la siguiente expresión
(2.24)
2.1.6 Cálculo del capacitor
El cálculo del capacitor se realiza de la misma forma que para un convertidor Reductor- Elevador, a partir de la ecuación que define el comportamiento de un capacitor
dv Av At I = C - = C - 3 C = - I c dt At Av
(2.25)
2.1.3 Corriente en el inductor
La comente en el inductor, de uno de los convertidores, se puede calcular sabiendo que I,,=VJR y por medio de las ecuaciones (2.10) y (2.12).
2 0 - (1 + 2k)(l- D)Gm 5 IL = .- (1 - DY R (2.16)
En la figura 2.5 se muestra el comportamiento de la comente en el inductor, de uno de los convertidores, durante un periodo de la tensión de salida para l'.=48V, R=48Q, G,=3.54 y k0.12. Esto se logra sustituyendo (2.13) en (2.16).
t lml Figura 2.5 Comente en el inductor.
2.1.4 Esfuerzos en los semiconductores
Los esfuerzos en comente de los semiconductores están determinados por la comente máxima que circula en el inductor.
21 SEP CENIDET DGIT CENTRO DE iNHiORMAC&OB

Capitulo 2 El inversor Reductor-Elevador
Sustituyendo (2.15) en (2.16) e Io,=VoJR se obtiene el valor máximo de la corriente en el inductor y que constituye el esfuerzo en comente a través de los semiconductores
I L = [l + (1 + k)G, 1. Iop m u
(2.17)
Finalmente, expresando la comente pico de salida en términos de la potencia aparente (s) y el Factor de Cresta (FC) de la carga
es posible obtener un no lineal
(2.18)
(2.19)
expresión que determina IC esfuerzos en comente ante carga lineal y
(2.20)
En (2.20) únicamente es necesario especificar cual es la forma de onda en comente que demanda la carga en función del factor de cresta para una potencia aparente determinada. Sin embargo, es importante señalar que (2.20) solo es válida cuando Z, se presenta en D,, y cuando esto no ocurre es necesario graficar (2.16) para conocer la comente máxima en el inductor.
En la figura 2.6 se muestra la variación del esfuerzo en comente ante una carga puramente resistiva ( F C = A) como una función de la tensión de entrada al inversor y la potencia aparente de salida para b0.12, V0,=120 V y G,=VoJKi.
Figura 2.6 Esfuerzos en comente ante carga lineal.
22 1

Capitulo 2 El inversor Reductor- Elevador
Mientras que en la figura 2.7 aparece la variación del esfuerzo en comente ante una carga no lineal con un factor de cresta ( FC = 3 ) como una función de la tensión de entrada al inversor y la potencia aparente de salida para k0.12, V0,,=120 V y C,=VoJV,.
I. I I I I I I I I
O 0 ;o 20 30 40 50 60 70 80 90 IM)
vi [VI
Figura 2.7 Esfuerzos en comente ante carga no lineal.
,
En cuanto a los esfuerzos en tensión, estos se determinan de manera relativamente sencilla a partir del circuito del inversor Reductor-Elevador, mostrado en la figura 2.8.
r - 1 1 va + - 'b
"o
Figura 2.8 Inversor Reductor-Elevador.
En la figura 2.8 se puede apreciar que cuando Q, se encuentra encendido, el esfuerzo en tensión a través de Q, es:
(2.21)
Del mismo circuito (figura 2.8) se puede observar que la tensión máxima en uno de los capacitores de salida esta dada por

2.1.5 Cálculo del inductor
El inversor Reductor-Elevador está formado por dos convertidores Reductores- Elevadores idénticos que operan en la misma forma y generan tensiones de salida similares, sólo que las componentes senoidales se encuentran defasadas 180". Por lo tanto sólo es necesario realizar el diseño de un convertidor Reductor-Elevador, como el mostrado en la figura 2.9; es decir, calcular los valores de L y C necesarios para lograr el funcionamiento deseado.
Figura 2.9 Convertidor Reductor-Elevador
El cálculo del inductor se realiza de la misma forma que en un convertidor Reductor- Elevador, a partir de la ley de inducción de Faraday que describe el comportamiento de un inductor
v - L - z L - * L = - v L di Ai At Ai L - dt At
(2.23)
Primero se especifica el valor deseado para el rizo de comente a través del inductor (di), posteriormente se determina cual es el voltaje que aparece en las terminales del inductor (YL) ya sea durante el encendido o el apagado del interruptor (e); para el convertidor Reductor-Elevador de la figura 2.9, durante el encendido del interruptor se aplica la tensión de entrada (y.) en las terminales del inductor. Finalmente se determina el tiempo de encendido del interruptor (ton) y se calcula el valor del inductor con la siguiente expresión
L .h - . I
Ai (2.24)
2.1.6 Cálculo del capacitor
El cálculo del capacitor se realiza de la misma forma que para un convertidor Reductor- Elevador, a partir de la ecuación que define el comportamiento de un capacitor
dv Av At I , = c-z c - s C=-I , dt Al Av
(2.25)

Se especifica el valor deseado en el rLzo de tensión a través del capacitor y se determina la comente que circula a través del capacitor ya sea durante el encendido o apagado del interruptor; para el convertidor Reductor-Elevador de la figura 2.9 durante el encendido del interruptor la comente que circula a través del capacitor es la comente de salida. Con estos datos y conociendo el tiempo de encendido del interruptor se calcula el capacitor mediante la siguiente ecuación
t Av
c =""-Io (2.26)
2.2 MODELO DEL INVERSOR
El modelo del inversor se obtiene a partir del circuito simplificado del inversor Reductor-Elevador mostrado en la figura 2.1 O, realizando las siguientes consideraciones:
Todos los elementos en el circuito son ideales. Una rama del inversor se encuentra operando en estado estacionario. La frecuencia de conmutación es mucho mayor a la frecuencia de salida (fc>>fo) y es posible considerar que la tensión en uno de los convertidores (Vb) se mantiene constante durante un periodo de conmutación (Tc).
Figura 2.10 Circuito simplificado del inversor Reductor-Elevador
Analizando las ecuaciones que describen el comportamiento del circuito para cada una de las posiciones del interruptor se obtiene:
Para u=l * I
L IL =-vi (2.27a)
* I 1 v =-Vb--Vc RC RC (2.27b)
Capitulo 2 El inversor Reductor-Elevador
Para u=- 1 . 1 I L =--V (2.28a) L e
Definiendo las siguientes variables:
x, =I,&
(2.28b)
(2.29a)
x2 = v e x (2.29b)
(2.3 Oa) wo = ~
1 JLC 1
Y = =
c=- 'b R J C
(2.30b)
(2.31a)
(2.31b)
Se obtiene el siguiente modelo en forma matricial:
(2.32) _-
2 - Wl
O su representación en ecuaciones de estado: . x = Ax+Bxu +C+ Du (2.33)
Sin embargo, por conveniencia se representa el modelo del inversor Reductor-Elevador de la siguiente manera: .
x = f(x) + g(x)u (2.34)
f(x) = Ax +C (2.35)
g(x) = Bx + D (2.36)
donde:
Y
26 1

Capitulo 2 El inversor Reducror-Elevador
2.3 TEORíA BÁSICA DEL CONTROL POR MODOS DESLIZANTES
Un sistema de estructura variable consiste en un conjunto de subsistemas continuos y una lógica de conmutación adecuada. Cambiando de una estructura a otra del sistema, de acuerdo con esta lógica de conmutación, es posible combinar las ventajas asociadas a cada una de las estructuras. El problema del diseño de estructura variable consiste precisamente en seleccionar los parámetros asociados a cada una de las estructuras y deñnir una lógica de conmutación adecuada. La principal razón para agregar esta complejidad al sistema es que se consiguen grandes ventajas, tales como: estabilidad ante grandes cambios de carga, robustez y rápida respuesta dinámica [9].
Por otro lado, un sistema de estructura variable puede poseer nuevas características que no presentan ninguna de las estructuras que lo componen. Por ejemplo, un sistema puede estar compuesto por dos estructuras y ser asintóticamente estable aunque ninguna de ellas lo sea. Esta posibilidad puede ilustrarse mediante algunos ejemplos; aunque son muy simples, dos de tales ejemplos son citados ya que muestran las ventajas que se obtienen al cambiar de estructura. Como primer ejemplo se considera el sistema de segundo orden
.X=-p (2.37)
Que tiene dos estructuras definidas por y = a,’ y y = aZ2 donde a,’)a, . El retrato de fase consiste de familias de elipses (figuras 2.11(a) y 2.11(b)) y por lo tanto, ninguna estructura es asintóticamente estable.
.. 2
(b) Figura 2.11 Sistema de estructura variable asintóticamente estable formado por dos estructuras estables. (a) Retrato de fase para pa;. (b) Retrato de fase para ya; . (c) Retrato de fase resultante con la ley de
conmutación dada por la ecuación (2.38).

Capítulo 2 El inversor Reductor-Elevador
El retrato de fase resultante, mostrado en la figura 2.1 l(c), es asintóticamente estable a pesar de que las dos estructuras que forman el sistema no son asintóticamente estables. Este primer ejemplo no es de control por modos deslizantes, sin embargo muestra claramente las ventajas que se pueden obtener mediante los cambios en la estructura del sistema, introducidos por un control on-off.
En el segundo ejemplo, se considera el sistema: .. . x - < x + p = o , 8 0 (2.39)
Donde la estructura lineal corresponde a una retroalimentación negativa y positiva cuando yes igual a a)O o a -a respectivamente y ambas estructuras son inestables (figura 2.12(a) y 2.12(b)).
(b) Figura 2.12 Sistema de estructura vanable asintóticamente estable formado por dos estructuras inestables.
(a) Retrato de fase para y'-a. @) Retrato de fase para p a . (c) Retrato de fase resultante con la ley de conmutación dada por la ecuación (2.40).
Note que el único movimiento convergente al origen es a lo largo del eigenvector estable de la estructura con y = -a . Si la conmutación ocurre en esta línea y en x = O con la ley de conmutación
(2.40) si xs)O
- a, si xs(0 donde: s =ex + x

Capitulo 2 €1 inversor Reductor-Elevador
entonces el sistema de estructura variable resultante es asintóticamente estable.
En el segundo ejemplo, se obtienen nuevas caractensticas en el sistema al formar una trayectoria deseada con partes de trayectorias que corresponden a distintas estructuras. El aspecto fundamental de los sistemas de estructura variable es la posibilidad de obtener trayectorias no inherentes a ninguna de las estructuras. Estas trayectorias describen un movimiento diferente: el denominado modo deslizante.
Para mostrar como ocurre tal movimiento, consideremos el segundo ejemplo usando O(c(A en lugar de c = ,? (figura 2.13). En la figura 2.13 se observa que las trayectorias en el plano de fase están dirigidas hacia la línea de conmutación s = O y por lo tanto una vez en esta línea el estado debe permanecer sobre ella. El movimiento a lo largo de una línea que no es trayectoria de alguna de las estructuras se denomina modo deslizante.
Figura 2.13 Modo deslizante en el sistema dado por la ecuación (2.39) para O(c(,?
La siguiente ecuación determina el comportamiento del sistema en el modo
.X+CX=O (2.41)
Es importante notar que este comportamiento depende únicamente del parámetro “c” y es independiente respecto a los parámetros de la planta y disturbios. Esta característica es de gran importancia cuando se controlan plantas variantes en el tiempo o se tratan problemas de rechazo a disturbios [9].
deslizante.
29

Capitulo 2 El inversor Reductor-Elevador
2.4 DISENO DEL CONTROLADOR POR MODOS DESLIZANTES
De Carlo [lo] divide el diseño del control de estructura variable en dos etapas:
La primera de ellas es proponer una superficie deslizante tal que el sistema original restringido a esta superficie responda en la manera deseada.
La segunda etapa comprende el desarrollo de una ley de control que satisfaga un conjunto de condiciones que garantizan la existencia del modo deslizante.
2.4.1 Superficie deslizante
En la literatura sobre control y sistemas de estructura variable se reporta dos tipos de superficies deslizantes: lineales y no lineales. Las superficies deslizantes lineales son las mas utilizadas debido principalmente a su simplicidad y fácil implementación práctica.
Por lo tanto, como primera etapa para este trabajo, se propone una superficie deslizante lineal dada por
c7=sx-sxr = sx, = o donde:
m = superficie deslizante s = [si , s2] = parámetros del controlador
x = [xi , x2IT = variables de estado
xr = [xir , q r I T = referencias para las variables de estado
Xe = [xie , x ~ ~ ] T = [xl-xlr , x 2 - . ~ 2 ~ ] ~ =errores en las variables de estado
(2.42)
En general, la superficie deslizante tiene como objetivo proporcionar al sistema el comportamiento deseado. La superficie deslizante propuesta (ecuación 2.42) puede visualizarse como el lugar geométrico donde los errores en las variables de estado valen cero (x , = O ) , es decir las variables de estado siguen de manera perfecta a sus respectivas referencias ( x = xr ). Esta visualización de la superficie deslizante propuesta permite entender que es posible cambiar el comportamiento del sistema, sin modificar la superficie deslizante, únicamente cambiando la forma de las referencias. En otras palabras, la superficie deslizante planteada permite flexibilidad al escoger el comportamiento deseado para el sistema.
2.4.2 Ley de control
Una vez que se ha encontrado la superficie deslizante, la segunda etapa del diseño es el desarrollo de una ley de control tal que dirija las trayectorias del sistema hacia la superficie deslizante y que cumpla las condiciones para la existencia del modo deslizante.
30

Capítulo 2 El inversor Reductor-Elevador
Generalmente la ley de control tiene la siguiente estructura
u+ parac>O u = { u - parae<O (2.43)
La ley de control propuesta (u), esta formada por dos términos
donde
(2.45)
El primero de ellos (u,) es continuo y recibe el nombre de control equivalente, mientras que el segundo (uN) es discontinuo y constituye la parte de la ley de control que asegura, de manera local, la existencia del modo deslizante. Este último término (uN), es la ley de control real con la que se implementa físicamente el circuito de control.
El control equivalente (ueq) Únicamente existe en la superficie deslizante y es un promedio entre los valores de la ley de control real, es decir - I< ueq '1, para este caso en particular. Geométricamente el control equivalente representa la ley de control continua que dirige el vector de velocidad ( X ) a lo largo de la superficie deslizante [9].
La expresión que define al control equivalente se obtiene a partir de la condición e = O , necesaria para que las trayectorias del sistema permanezcan en la superficie deslizante ( ; = O ) [ I l l . Por lo tanto, la ley de control que resuelve la ecuación c=O es el control equivalente y esta dado por:
r
(2.46)
La ecuación (2.44), no es la Única forma posible para la ley de control. Existen una infinidad de alternativas para desarrollar la ley de control, de acuerdo con la estructura dada por la ecuación (2.43). Sin embargo, el proponer la ley de control con la forma dada por la ecuación (2.44), permite verificar fácilmente las condiciones de existencia del modo deslizante ya que, como se verá en la siguiente sección, para el sistema dado por la ecuación (2.34) se cumple que [IO]:
(2.47)
31

Capitulo 2 El inversor Reductor-Elevador
2.4.3 Existencia del modo deslizante
En la literatura [10,11,16,17,24] se reportan las condiciones necesarias y suficientes para la existencia del modo deslizante. Estas condiciones se enumeran a continuación:
1. Condición de acercamiento (reaching condition). 2. Condición de invarianza (matching condition).
Antes de describir cada una de estas condiciones y mencionar cual es su significado, es importante aclarar que, para este caso particular, en la ley de control seleccionada u'(x)<u-(x). Debido a esto, en la mayoría de las condiciones es necesario invertir el sentido de la desigualdad.
Condición de acercamiento
El primer enfoque de la condición de acercamiento, y uno de los más utilizados, fue propuesto por Emelyanov [ 111 a principios de los 50's y consiste en satisfacer el siguiente par de desigualdades:
n)O, cuando cr(0
cr(0, cuando o ) O
O la siguiente desigualdad equivalente:
an( O .
(2.48a)
(2.48b)
(2.49)
AI satisfacer esta condición se garantiza, localmente, que las trayectorias del sistema se dirigen hacia la superficie deslizante.
Hallando la primer derivada de la superficie deslizante ( m ) , sustituyendo la primer derivada del vector de estados y la ley de control propuesta se obtiene:
Sustituyendo el control equivalente en esta expresión se obtiene: . o = s ( B x + D ) " ~
(2.50)
(2.51)
Si se observa la expresión para la primer derivada de la superficie deslizante se encuentra que también pudo obtenerse a través de la ecuación (2.47) ya que la parcial de la superficie deslizante respecto a los estados es el vector que contiene los parámetros del controlador (s).

. El inversor Reductor-Elevador Capitulo 2
Multiplicando D y a se encuentra la condición de existencia para el sistema planteado:
(2.52)
Sin embargo el producto (-a.Sgn(a)) siempre es negativo y solo es necesario satisfacer la siguiente condición:
s(Bx+D)) O (2.53)
Sustituyendo las matrices y vectores involucrados en esta condición se obtiene la condición explícita a satisfacer para asegurar la existencia del régimen deslizante.
$ + x 2 ] - s2xI ) O (2.54)
Para determinar los parámetros del controlador de una forma más explícita, es necesario sustituir las ecuaciones (2.29a) y (2.29b) en la condición de existencia dada por la ecuación (2.54), con lo que se obtiene la siguiente expresión
(2.55)
Donde, V, representa la tensión en uno de los capacitores y corresponde a la tensión de salida en uno de los convertidores (Vo o Vb) que como se puede apreciar en la figura 2.l(b) es positiva en todo momento, mientras que Z, representa la comente en el inductor y de acuerdo con la figura 2.5 puede ser tanto positiva como negativa.
Finalmente, los parámetros del controlador que satisfacen la condición de existencia se determinan proponiendo un valor en s2 y encontrando un valor para s, que cumpla la siguiente desigualdad:
(2.56)
Es importante señalar que para satisfacer la condición de existencia únicamente importa el cociente entre s, y s2. Y existe una infinidad de pares de valores en los parámetros del controlador, con el mismo cociente entre s, y s2, que cumplen la condición de existencia.

Capiiulo 2 El inversor Reductor-Elevador
Condicihn de invarianza
Para que exista un movimiento deslizante no singular sobre la superficie o, necesariamente deben cumplirse, localmente, las siguientes condiciones [ 17,241:
(2.57)
(2.58)
AI cumplir esta condición se asegura que el sistema se mantiene dentro de la superficie deslizante, una vez que se alcanza dicha superficie.
Debido a que el sistema es multientrada lo que implica que haya mas de una superficie de deslizamiento, estrictamente hablando la condición (2.58) se convierte en:
(2.59)
La condición (2.59) es demasiado restrictiva ya que implica que el campo vectorial g(x) debe ser transversal a todas las superficies deslizantes. Si se quisiera realizar un control jerarquizado, es decir ir alcanzando por separado cada una de las superficies, debena cumplirse esta condición.
Sin embargo, debido a que en este caso particular no se ha utilizado un control jerarquizado y únicamente se desea llegar a la intersección de las superficies, solo se requiere que el campo vectorial g(x) sea transversal a la intersección de las superficies, con lo cual la condición (2.59) se reduce a la siguiente expresión:
(2.60)
La condición (2.60) es idéntica a la expresión (2.53) ya que para este caso particular, la derivada parcial de la superficie deslizante respecto a los estados es el vector (s) que contiene los parámetros del controlador (s, y s2) y el campo vectorial g(x)=Bx+D. Previamente se ha mostrado el procedimiento a seguir para determinar los valores en los parámetros del controlador (s, y s2) que cumplen con esta condición.
34
Capítulo 2 El inversor Reductor-Elevador
2.4.4 Dinámica de deslizamiento ideal
En la sección 2.4.2 se obtuvo el control equivalente (ueq), el cual esta definido como la ley de control continua que mantiene las trayectorias del sistema en la superficie deslizante (o j y que esta dado por [ 10,11,24]:
\
r 7
U eq = -[sBx]- (2.61)
A partir de la definición misma del control equivalente se deduce que la dinámica del sistema en la superficie deslizante (dinámica de deslizamiento ideal) esta gobernada por el control equivalente y dicha dinámica se obtiene sustituyendo la ecuación (2.61) en el sistema original. Una vez que se conoce la dinámica de deslizamiento ideal es necesario verificar que dicha dinámica sea satisfactoria, lo que implica realizar un análisis formal de la estabilidad del sistema en la superficie deslizante. Un análisis de este tipo queda fuera de los alcances del presente trabajo debido a la complejidad que involucra, sin embargo para verificar la estabilidad del sistema en la superficie deslizante se han realizado numerosas simulaciones ante diferentes condiciones de carga.
Un análisis formal de la estabilidad del sistema en la superficie deslizante constituye un trabajo de control interesante considerando que existen algunos desarrollos matemáticos que establecen ciertas semejanzas entre el control por modos deslizantes y el control por modulación de anchura de pulsos en los convertidores CD-CD. Específicamente una equivalencia entre el control equivalente y el ciclo de trabajo cuando se utilizan frecuencias de conmutación elevadas [25].
2.4.5 Propiedad de rechazo a perturbaciones
Sea el sistema perturbado, dado por la siguiente ecuación:
x = f(x)+ g(x)u + p (2.62)
Donde p=af(x) representa una perturbación del campo vectorial f(x). Si p=h(í) entonces p representa una perturbación externa independiente del estado. Se dice que un modo deslizante del sistema perturbado, ecuación (2.62), satisface la propiedad de invarianza fuerte respecto a la señal de perturbación p si y solo si el vector perturbador satisface la siguiente condición [24]:
P = v . g ( x ) donde v es una función escalar.
(2.63)
De lo contrario, es decir si no existe una función escalar v que cumpla con la ecuación (2.63), se dice que el sistema tiene la propiedad de invarianza débil respecto a la perturbación p. En este caso se ha comprobado, con relativa facilidad, que el sistema dado por la ecuación (2.34) tiene la propiedad de invarianza débil respecto a perturbaciones en la resistencia de carga (R).

Capitulo 2 El inversor Reductor-Elevador
2.5 IMPLEMENTACI~N PRÁCTICA DEL CONTROLADOR
Aunque la implementación práctica del controlador por modos deslizantes es relativamente sencilla se deben cuidar varios aspectos cnticos para lograr un buen diseño y en consecuencia obtener los resultados deseados. Tales como circuitos adicionales para limitar la frecuencia y técnicas para sensar todas y cada una de las variables de estado así como para generar sus respectivas referencias.
En la figura 2.14 se muestm el esquema simplificado de un controlador por modos deslizantes de propósito general para convertidores de potencia CD-CD [15]. U, y U, son los voltajes de entraday salidarespectivamente, mientras que iL, y uc, (i = 1,2 ,... r ; j = r + I , r +2 ,... N-1) son las variables de estado del convertidor (comentes en los inductores y voltajes en los capacitores). El interruptor Q representa la no lineaiidad del sistema e indica que el Convertidor puede asumir solo dos subtopologías lineales, cada una asociada a una posición del intemptor.
b... 079- I Q I
$I "C",
+? HC
144 Figura 2.14 Esquema simplificado del controlador por modos deslizantes de propósito general.
Todos los convertidores utilizados en electrónica de potencia tienen esta característica y son representadas perfectamente por el esquema equivalente de la figura 2.14. Sin embargo es importante recalcar que el esquema simplificado y el enfoque matemático propuestos solo son válidos para cualquier convertidor CD-CD operando en modo de conducción continua ya que se ha partido del supuesto de que el circuito solo puede asumir dos subtopologías [ 151.
El funcionamiento del circuito esquemático de la figura 2.14 es el siguiente: se sensan todas las variables de estado y se comparan contra sus respectivas referencias, con lo cual se obtienen los errores correspondientes xJx,-x,J. Posteriormente estos errores son multiplicados por las constantes (s,) que representan los parámetros del controlador, y son sumados para obtener lo que se conoce como superficie deslizante (a).El bloque de histéresis (Hc) se encarga de mantener esta superficie deslizante lo más cercana a cero de tal forma que se cumpla la siguiente igualdad
36
El inversor Reductor-Elevador Capitulo 2
(2.64) i = l
donde: N es el orden del sistema (número de variables de estado). La superficie deslizante (ecuación 2.64) representa un hiperplano en el espacio de los errores del estado que pasa a través del origen y cada una de las dos regiones separadas por este plano es asociada, por el bloque de histéresis, a una subestructura del convertidor.
Asumiendo que las trayectorias del estado cercanas a la superficie en ambas regiones, están dirigidas hacia la superficie deslizante (condición de acercamiento). Una vez que el sistema alcanza la superficie deslizante es posible mantenerlo dentro de ella mediante una operación adecuada de los interruptores (condición de invananza). Desde un punto de vista teórico, el diseño del controlador por modos deslizantes solamente requiere una selección adecuada de los coeficientes s, de tal forma que se cumplan las condiciones para la existencia del régimen deslizante (condiciones de acercamiento e invananza). Sin embargo en la práctica es necesario implementar circuitos adicionales al esquema simplificado del controlador para conseguir un funcionamiento adecuado, es decir que la dinámica de la superficie deslizante cumpla los requerimientos. Un ejemplo de estos circuitos son los encargados de generar las referencias para las variables de estado y limitar la frecuencia de conmutación.
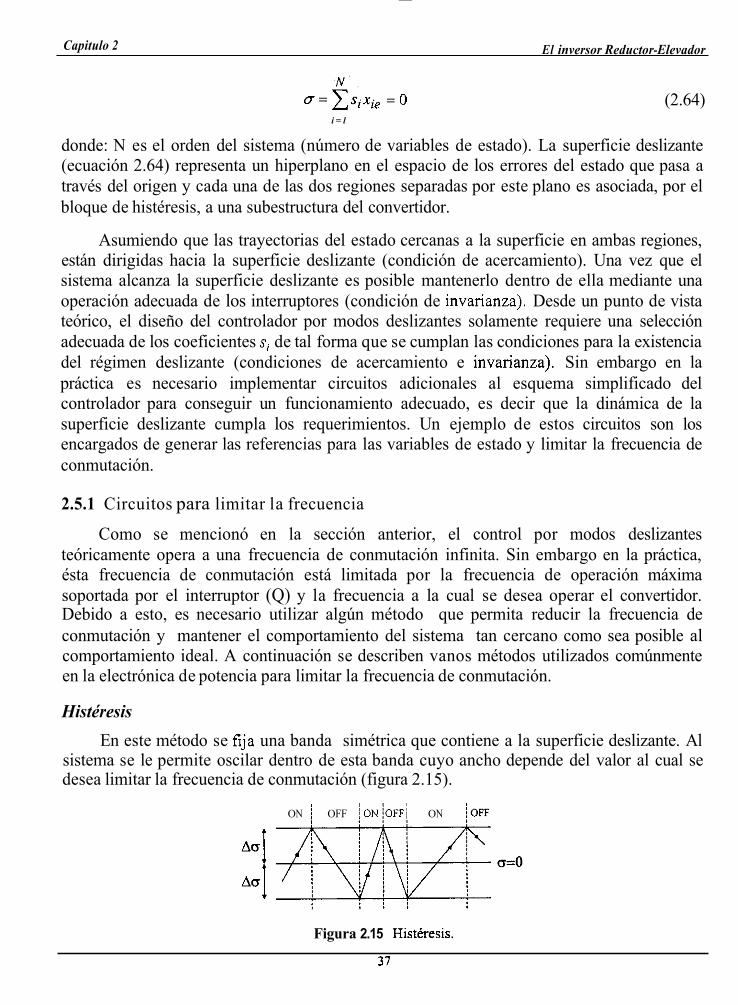
2.5.1 Circuitos para limitar la frecuencia
Como se mencionó en la sección anterior, el control por modos deslizantes teóricamente opera a una frecuencia de conmutación infinita. Sin embargo en la práctica, ésta frecuencia de conmutación está limitada por la frecuencia de operación máxima soportada por el interruptor (Q) y la frecuencia a la cual se desea operar el convertidor. Debido a esto, es necesario utilizar algún método que permita reducir la frecuencia de conmutación y mantener el comportamiento del sistema tan cercano como sea posible al comportamiento ideal. A continuación se describen vanos métodos utilizados comúnmente en la electrónica de potencia para limitar la frecuencia de conmutación.
Histéresis En este método se fija una banda simétrica que contiene a la superficie deslizante. Al
sistema se le permite oscilar dentro de esta banda cuyo ancho depende del valor al cual se desea limitar la frecuencia de conmutación (figura 2.15).
ON j OFF ~ O N / O F F / ON /OFF
Figura 2.15 Histéresis.
37

Capitulo 2 El inversor Reductor-Elevador
La acción de control sobre el interruptor esta dada por las siguientes expresiones: Q se enciende, Q se apaga,
si a( Ao si a) - Ao
(2.65)
Frecuencia de muestreo constante
En este método, se evalúa el signo de la superficie deslizante (a) a intervalos de tiempo discretos (figura 2.16). La frecuencia de muestreo es el doble de la frecuencia máxima de conmutación deseada. Es importante señalar que los cambios en la acción de control solo pueden ocurrir en los instantes de tiempo KTs (donde K es un entero y Ts es el período de conmutación).
kTs (k+l)Ts (k+Z)Ts (ki5)Ts
Figura 2.16 Frecuencia de muestreo constante
La acción de control esta dada por las siguientes desigualdades: Q se enciende, si a (KTs) ( O Q se apaga, si D (KTs) ) O
Frecuencia de conmutación constante
(2.66)
En este método el interruptor se enciende en los instantes que 6 0 . Y se apaga solamente en los instantes de tiempo KTs (donde K es un entero positivo y Ts es el período de la kuencia de conmutación deseada) cuando @O. Si 6 0 en cualquier instante KTs, entonces el interruptor permanece encendido al menos hasta el instante de tiempo (K+I)Ts (figura 2.17).
kTS (k+l)Ts (k+Z)Ts (kc3)Ts
Figura 2.17 Frecuencia de conmutación constante.
La acción de control esta dada por las siguientes condiciones: Q se enciende, si a( O Q se apaga, s i a ) 0 en t =KTs (2.67)
38
Capitulo 2 E[ inversor Reductor-Elevador
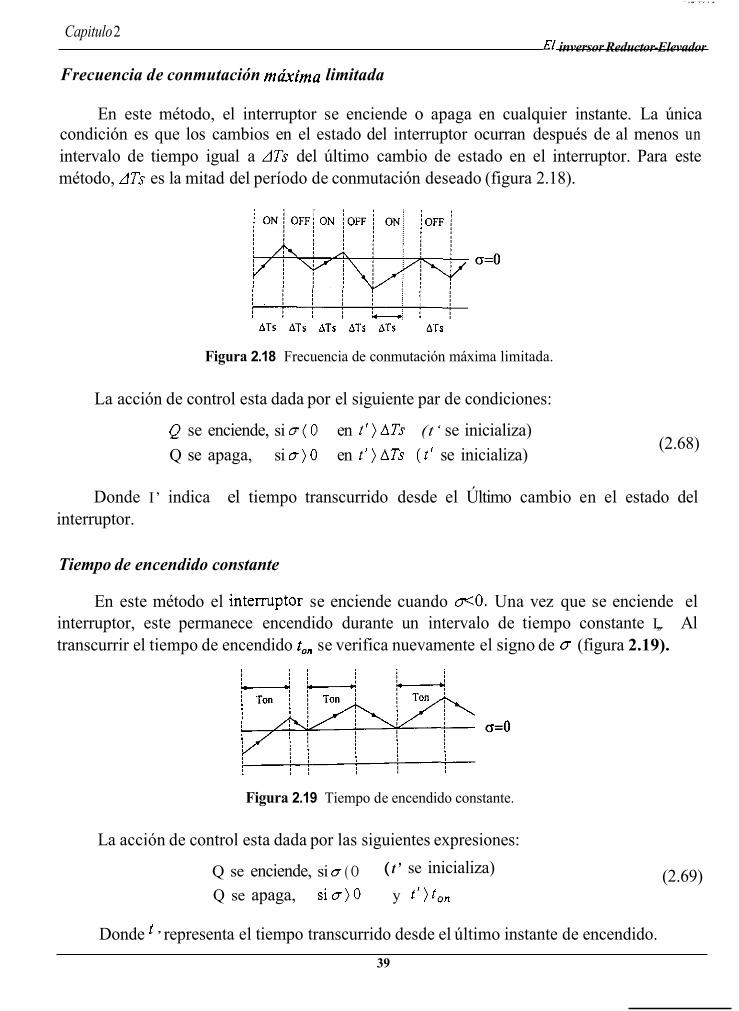
Frecuencia de conmutación mhima limitada
En este método, el interruptor se enciende o apaga en cualquier instante. La única condición es que los cambios en el estado del interruptor ocurran después de al menos un intervalo de tiempo igual a ATs del último cambio de estado en el interruptor. Para este método, ATs es la mitad del período de conmutación deseado (figura 2.18).
Figura 2.18 Frecuencia de conmutación máxima limitada.
La acción de control esta dada por el siguiente par de condiciones:
Q se enciende, si o(0 en t ’)ATs (t‘ se inicializa) Q se apaga, si o)O en f ’ )ATs ( I ‘ se inicializa) (2.68)
Donde I’ indica el tiempo transcurrido desde el Último cambio en el estado del interruptor.
Tiempo de encendido constante
En este método el intemptor se enciende cuando 6 0 . Una vez que se enciende el interruptor, este permanece encendido durante un intervalo de tiempo constante I,,. Al transcurrir el tiempo de encendido ton se verifica nuevamente el signo de CT (figura 2.19).
Figura 2.19 Tiempo de encendido constante.
La acción de control esta dada por las siguientes expresiones:
Q se enciende, si o ( O Q se apaga, s i a )O y f ’ ) t , ,
( t’ se inicializa) (2.69)
Donde t ’ representa el tiempo transcurrido desde el último instante de encendido. 39

Capitulo 2 El inversor Reductor-Elevador
Una característica importante a considerar en la selección del método más adecuado para limitar la frecuencia es que el control por modos deslizantes opera de manera natural a frecuencia variable y esto impide determinar en forma precisa el tiempo de encendido O apagado de los interruptores. En consecuencia se complica el calculo de los elementos que forman al inversor (L y C, etc.), ya que como se describió en las secciones 2.1.5 y 2.1.6 los valores de L y C dependen del tiempo de encendido del interruptor.
En el presente trabajo se ha utilizado el método de tiempo de encendido constante debido a la sencillez de su implementación y a que se determina en forma directa el tiempo de encendido del interruptor, con lo cual se logra calcular fácilmente los valores de L y C.
2.5.2 Referencias para las variables de estado
Para que el controlador por modos deslizantes opere de manera correcta es necesario generar adecuadamente cada una de las referencias para las variables de estado en el sistema. En cuanto a las referencias para las variables de estado que representan el voltaje a través de los capacitores, estas se obtienen de manera directa ya que este voltaje corresponde a la tensión de salida en cada uno de los convertidores que forman el inversor y se conocen por definición.
Sin embargo, generar las referencias para las variables de estado, que representan las comentes en cada uno de los inductores del inversor, constituye un problema practico ya que estas comentes dependen de la potencia demandada por la carga, además de tener una forma dificil de obtener. Para resolver este problema, se calcula el error entre ésta variable de estado y su respectiva referencia, utilizando un filtro pasa-altas que elimina las componentes de baja frecuencia de la comente en el inductor y deja solamente el rizo de alta frecuencia, de manera que se emule la resta entre la comente en el inductor y su referencia. En la figura 2.20 se muestra un circuito simplificado de la forma directa e indirecta para generar el error entre la variable de estado, que representa a la comente en el inductor y su referencia.
Figura 2.20 Circuitos para generar el error entre la variable de estado que representa la comente en el inductor y su referencia. (a) Forma directa @)Forma indirec.@.
40
il .' . ,c.
Capítulo 2 El inversor Reductor-Elevador
2.6 EJEMPLO DE DISEÑO
En esta sección se realiza el diseño de un prototipo del inversor estudiado con las especificaciones dadas a continuación. El ejemplo incluye el cálculo detallado de los elementos que componen el inversor ( L y C) así como el procedimiento para determinar los valores de los parámetros del controlador que cumplen con las condiciones de existencia del régimen deslizante.
2.6.1 Especificaciones
del inversor Reductor-Elevador con las siguientes especificaciones: Para validar el análisis desarrollado en el presente capítulo se construyó un prototipo
Tensión de entrada (VJ Frecuencia máxima de conmutación Cfs,,) Tensión de salida (V,) Frecuencia de salida &) Potencia de salida (Po)
48 Vcd
30 Hz 120 v,, 60Hz
300 Watts
2.6.2 Diseño
El diseño del inversor Elevador consiste básicamente en calcular los elementos que lo forman (L y C), determinar las especificaciones en comente y tensión de los dispositivos semiconductores y encontrar los parámetros del controlador (s, y s2) mínimos necesarios para cumplir la condición de existencia del régimen deslizante.
A continuación se enumeran y describen los pasos a seguir para el diseño del inversor Reductor-Elevador
1. Seleccionar el voltaje de holgura (V,) y calcular la razón entre V,, y V, ( k ) . 2. Calcular la ganancia máxima del inversor (G,) y el ciclo de trabajo máximo (O,,,,). 3. Calcular los esfuerzos en comente (ILmnx) y tensión (V@,) a través de los
ión máxima en el capacitor ( Vcma). semicon ' il!l!!L!!!, !~ íComO le II
4. Calcular el tiempo de encendido del interruptor (to,). 5 . Calcular los valores del inductor ( L) y el capacitor (C) 6 . Calcular los parámetros del controlador (si y s2).
Paso 1:
Seleccionando un voltaje de holgura V,,=20 Volts y utilizando la ecuación (2.5) se encuentra que el factor de holgura es k0.12.
El inversor Reductor-Elevador Capítulo 2
Paso 2:
Mediante la ecuación (2.7) se encuentra que Ia ganancia máxima del G,=3.54 y con la ecuación (2.15) se encuentra que el ciclo de trabajo D,,=O.8.
inversor es máximo es
- 3.54 G,,,=-- vOP
5.
d Paso 3 e
Mediante la ecuación (2.20) se encuentra que el esfuerzo en comente ante una carga puramente resisitiva, (IT=&) es ZL,,=17.5A. Mientras que el esfuerzo en tensión esta dado por la ecuación (2.21) y es VQm,=237.7V. La tensión máxima en el capacitor esta dada por la ecuación (2.22) y es igual a Vcm,=189.7V
FC.S = [l t (1 t k)G,]- = 17.5.4
' l m u V o m
Paso 4:
Como se mencionó en la sección 2.5.1, para limitar la frecuencia de conmutación se ha seleccionado el método que mantiene el tiempo de encendido constante. En este caso la frecuencia máxima de conmutación especificada esfs= 30 kHz.
En vista de que el ciclo de irabajo máximo del convertidor es 0,,=0.8, y para evitar
I!]\ \ \\ \!\or ligeramente mayor al ciclo de trabajo
que el interruptor se mantenga encendido durante un período de conmu recomendable limitar el cicl 9 ii maxim0 teórico [22] , en este caso se ha limitado a D,,,,=O.SS. I I
De esta manera, el tiempo de encendido (to,) se puede determinar a partir de la definición del ciclo de trabajo dada por la siguiente ecuación
D=-- 'on - o n h (2.70) Ts
Utilizando la ecuación (2.70) se encuentra el valor para el tiempo de encendido t0,=28.33 p que al mantenerse constante limita la frecuencia máxima de conmutación a 30 lcHz y permite calcular los valores de L y C de la siguiente manera.
42
Copitulo 2 El inversor Reductor-Elevador
Paso 5:
Especificando un rizo de comente en el inductor del 20% (0.2*ZL,,) y mediante la ecuación (2.24) se obtiene el valor del inductorL = 388 ,uH.
Y especificando un rizo de tensión en el capacitor del 2% (0.02*Vcm,) y utilizando la ecuación (2.26) se encuentra el valor del capacitor C = 26.4 p?
I Av
C = -Io = 26.4pF
Paso 6:
Para calcular los parámetros del controlador se utiliza el procedimiento desarrollado en [22] y descrito en la sección 2.4.3. Se propone s2=l y mediante la ecuación (2.56) se encuentra que para satisfacer la condición de existencia del régimen deslizante s,>0.3.
2.6.3 Simulaciones
La simulación constituye una herramienta muy útil, ya que permitirá estudiar los efectos de diferentes valores para los parámetros del controlador en el comportamiento del inversor. Y una vez que los resultados obtenidos mediante la simulación sean satisfactorios, se procede a implementar prácticamente el controlador.
Las simulaciones presenta of Nonlinear Systems) un software diseñado para resolver ecuaciones diferenciales ordinarias y simular sistemas dinámicos. Una de las ventajas de S imon es que permite describir al sistema como una conexión de subsistemas cuyo comportamiento esta caracterizado por ecuaciones diferenciales. Esto resulta atractivo ya que el modelo del inversor Reductor-Elevador obtenido en la sección 2.2 está representado en esta forma.
Como primera prueba se realizó una simulación del modelo obtenido en la sección 2.2 con parámetros en el controlador que cumplen la condición de existencia (s,=0.8 y s,=l). Los resultados se muestran en la figura 2.21.
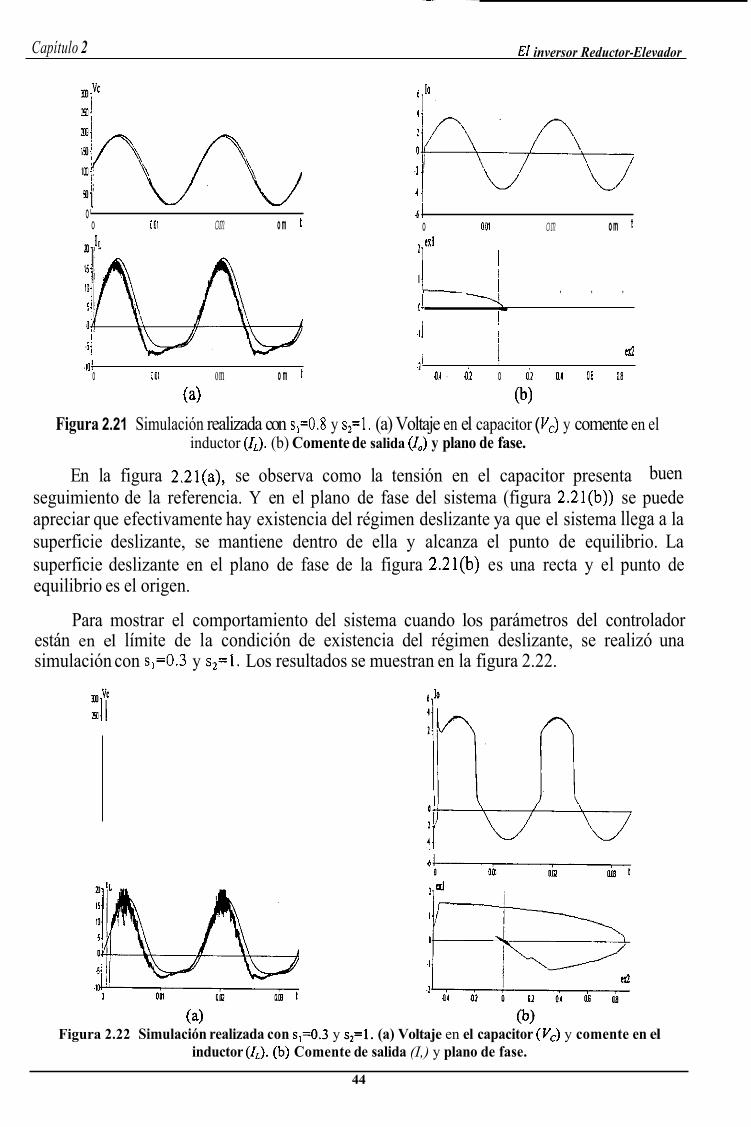
E / inversor Reductor-Elevador Capítulo 2
O‘ o 001 om o m I
.IO! o O01 om o m t
(a)
d / o 001 om o m I
, , ,
o
.I I
I .I trl
01 ’ 01 o o‘¿ o1 O 6 O8
(b) Figura 2.21 Simulación realizada con s,=0.8 y s,=l. (a) Voltaje en el capacitor ( Vc) y comente en el
inductor (IL). (b) Comente de salida (io) y plano de fase.
En la figura 2.21(a), se observa como la tensión en el capacitor presenta buen seguimiento de la referencia. Y en el plano de fase del sistema (figura 2.21(b)) se puede apreciar que efectivamente hay existencia del régimen deslizante ya que el sistema llega a la superficie deslizante, se mantiene dentro de ella y alcanza el punto de equilibrio. La superficie deslizante en el plano de fase de la figura 2.21(b) es una recta y el punto de equilibrio es el origen.
Para mostrar el comportamiento del sistema cuando los parámetros del controlador están en el límite de la condición de existencia del régimen deslizante, se realizó una simulación con s,=0.3 y s,=l. Los resultados se muestran en la figura 2.22.
I
I ’ 4 :k
(4 col Figura 2.22 Simulación realizada con ~ ~ 4 . 3 y s,=l. (a) Voltaje en el capacitor (V,) y comente en el
inductor (IL). (b) Comente de salida (I,) y plano de fase.
44

El inversor Reductor-Elevador Capitulo 2
En la figura 2.22(a) se aprecia cómo la tensión y la corriente se distorsionan en las crestas debido a que durante estos instantes deja de cumplirse la condición de existencia. En el plano de fase (figura 2.22(b)) esto se manifiesta como una mayor oscilación alrededor del punto de equilibrio.
Para mostrar la respuesta dinámica que se logra en el inversor al implementar una estrategia de control por modos deslizantes, se realizaron simulaciones ante cambios de carga. Los resultados se muestran en la figura 2.23 y corresponden a cambios de carga entre R=144R y R=72R (equivalente a cambios de carga entre 100 y 200Watts) con los siguiente parámetros en el controlador s,=0.8 y s,=l.
Figura 2.23 Simulación ante cambios de carga realizada con s,=0.8 y s,=l.(a) Voltaje del capacitor (V,) y comente del inductor (IL). (b) Comente de salida (io) y plano de fase.
En la figura 2.23(a) se aprecia que efectivamente el control por modos deslizantes proporciona rápida respuesta dinámica al inversor ya que ante los cambios de carga solamente se presentan ligeras distorsiones en la tensión del capacitor ( Vc).
2.6.4 Resultados experimentales
Para validar el análisis desarrollado tanto del inversor Reductor-Elevador como del controlador por modos deslizantes se construyó un prototipo con las especificaciones dadas en la sección 2.6.1 y se realizaron una sene de pruebas.
En la figura 2.24 se muestran las principales formas de onda del prototipo de inversor Reductor-Elevador ante una carga puramente resistiva que demanda una potencia de 300Watts.

El inversor Reductor-Elevador Capitulo 2
. .
. . . . -. i *
Tau Run: lO .oLs / i HI RLI . . &-.
Ml lh l I O O P 2%" (4 (b)
Figura 2.24 Principales formas de onda del inversor Reductor-Elevador para una potencia de salida de 300Waits. (a) Voltaje de salida (V,) y comente de salida (IJ @)Voltaje de salida (V,) y comente en el
inductor (1').
Tau Run: lO .oLs / i HI RLI . .
. . . .
Ml lh l I O O P 2%" (4 (b)
Figura 2.24 Principales formas de onda del inversor Reductor-Elevador para una potencia de salida de 300Waits. (a) Voltaje de salida (V,) y comente de salida (IJ @)Voltaje de salida (V,) y comente en el
inductor (1').
Es interesante notar la gran semejanza entre la gráfica para la comente en el inductor (ZL), obtenida analíticamente en la sección 2.1.3 (figura 2.5), y la comente que se obtuvo experimentalmente (figura 2.24(b)). La distorsión armónica total (THD) en la tensión de salida es del 5.04%.
En la figura 2.25 se muestran los resultados obtenidos ante cambios de carga entre potencias de salida de 100 y 200 Watts.
(a) o>) Figura 2.25 Formas de onda ante cambios de carga (Po=lOOW y P0=200 W).
(a) Voltale de salida (V,) y comente de salida (IJ @)Voltaje de salida (V,) y comente en el inductor (IL).
La figura 2.25 comprueba experimentalmente que el control por modos deslizantes proporciona rápida respuesta dinámica al inversor ya que los transitorios producidos por los cambios de carga son de corta duración, menor a lms.
46

I
Capitulo 2 El invmor Reducior-Elevador
En ia figura 2.26 se presentan las formas de onda en el inversor ante una carga no lineal con una potencia aparente de 133 VA. La carga no lineal esta formada por un circuito rectificador con un capacitor de 220 ,uF y una resistencia de 240 Q.
(a) (b) Figura 2.26 Formas de onda ante carga no lineal con una P0=133VA. (a) Voltaje y comente de salida.
@)Voltaje de salida (V,) y comente en el inductor (1').
En la figura 2.26 se puede apreciar como el efecto de recarga del capacitor se manifiesta en un incremento abrupto en la comente del inductor y una distorsión en la tensión de salida. Para esta prueba la distorsión armónica total (THD) en la tensión de salida fue del 5.4%.
En cuanto a eficiencia y distorsión armónica se refiere, el prototipo del inversor Reductor-Elevador presenta una eficiencia máxima del 85% para un P0=200W y una THD máxima del 5% para una P0=300W con carga lineal. En la figura 2.27 se muestran las curvas de eficiencia (q) y distorsión armónica total (THD) en función de'la potencia de salida.
rl ["/.I THD[%]
I I 1
3 I l l 100 150 200 250 300 50 100 150 200 250 300
Figura 2.27 Curvas caractensticas del inversor Reductor-Elevador para carga lineal. (a) Eficiencia (q). (b) Distorsión armónica total (THD).

El inversor Reductor-Elevador Capítulo 2
48

CAPITULO 3
COMPARACIÓN CON OTRAS ALTERNATIVAS DE INVERSORES
Con el objetivo de realizar un análisis comparativo entre el inversor Reductor-Elevador y otras alternativas de inversores, en este capítulo se describen y analizan los inversores Elevador y Reductor. También se aborda el diseño del controlador por modos deslizantes para cada uno de estos inversores, y para estandarizar las pruebas la superficie deslizante y la estructura de la ley de control son iguales a las propuestas para el inversor Reductor- Elevador del capítulo anterior. Se presentan simulaciones, resultados experimentales, curvas de eficiencia, distorsión armónica y algunos otros aspectos de interés, que penniten establecer este análisis comparativo.
3.1 EL INVERSOR ELEVADOR
3.1.1 Análisis y diseño
El inversor Elevador esta formado por dos convertidores Elevadores, bidireccionales en comente, alimentando a la carga en modo diferencia1 (figura 3.l(a)). Y de manera similar al inversor Reductor-Elevador, cada convertidor genera una tensión formada por un nivel de CD (Ved) y una componente senoidal a la frecuencia deseada en la tensión de salida (figura 3.1 (b)).
49

Capitulo 3 Comparacion con oiras alternativas de inversores
Para maximizar la excursión de tensión a traves de la carga, las componentes senoidales de los convertidores A y B se encuentran defasadas 180" una respecto a otra. Ambos convertidores operan en modo de conducción continua y se controlan de manera independiente, es decir hay un controlador para cada convertidor.
va ................................................
...............................................
................................................
................. h.f ............................. #--I- Carga O Y
I Convertidor I V. Elevador
O 1 I
1
I vo ..............................................
.................................................
................................................ O
t
(b) Figura 3.1 El Inversor Elevador (a) Convertidores Elevadores alimentando a la carga en modo diferencial
o>) Tensiones en los convertidores y tensión de salida.
Las tensiones en los convertidores A y B (figura 3.l(b)) están definidas, por las
(3.1)
siguientes ecuaciones: V, = Ved +-Sena VOP
2
La componente de CD que genera cada convertidor (V,) esta dada por la siguiente expresión:
donde: vh = k . vop (3.4) Vh = Voltaje de holgura k = Factor de holgura
50

Capitulo 3 Comparación con otras alternativas de inversores
En la figura 3.l(b) se aprecia que teóricamente, el valor mínimo en el VCd que debe generar cada convertidor para asegurar el funcionamiento del inversor, esta dado por:
r.3 4 D
IO
c ==
Expresando el V,en términos de la ganancia máxima (Gm=VoJK.), se obtiene:
+ Carga Va
-
1 2
VCd = V, +(k+-)G,,,b
r.3 4 D L
IO vi + -
c T ' T- i= Q
Ganancia
La ganancia del inversor se obtiene a partir de las ecuaciones básicas que describen el comportamiento del convertidor Elevador unidireccional en comente (figura 3.2):
+ Carga Va
- '
1 IL - Io 1-D
Figura 3.2 Convertidor Elevador.
Debido a que las componentes senoidales de los convertidores A y B eL 5n defasada 180° y el V, es el mismo, la tensión de salida en el inversor es:
Al sustituir (3.6) y (3.7) en (3.9) se obtiene la ganancia del inversor Elevador
5 = 20 -(l+ 2k)Gm 5 1-D (3.10)
En la figura 3.3 se muestra la gráfica de la ganancia del inversor Elevador para G,,,=3.54 y k0.12.

Comparación con otras alternativas de inversores Capifulo 3
D
Figura 3.3 Ganancia del inversor Elevador.
Ciclo de trabajo
El ciclo de trabajo en uno de los convertidores durante un periodo de la tensión de salida se obtiene despejando D en (3.7), sustituyendo (3.1), (3.6) y la ganancia máxima (G,=V&).
1
1 + kG, + %(1+ S e n a ) 2
D = 1 - vi = I - VOP V,d + -Sen 2
A partir de (3.1 l), se obtiene el ciclo de trabajo máximo
(3.11)
(3.12)

. . . . , . . -.. ,
L'" A 芕 UP - .. w:,:!' Capitulo 3 . . Comparación con otras alternativas de inversores
, . . .
Corriente en el inductor
La comente en el inductor, de uno.'de los convertidores, se calcula mediante la ley de Ohm y las ecuaciones (3.8) y (3.10)
2 0 - (1 + 2/c)Gm (1 - 0) I; I , = ._ (1 - R (3.13)
Sustituyendo (3.1 1) en (3.13) se logra conocer el comportamiento de la comente en el inductor, de uno de los convertidores, durante un período de la tensión de salida (figura 3.5) para V,=48V, R=48R, G,= 3.54 y k-0.12.
Figura 3.5 Comente en el inductor.
Esfuerzos en los semiconductores
El esfuerzo en comente a través de los semiconductores se obtiene sustituyendo (3.12) en (3.13) e Iop=VoJR
(3.14)
Expresando la comente pico de salida en términos de la potencia aparente (S) y el factor de cresta (FC) de la carga se obtiene la expresión para los esfuerzos en comente ante carga lineal y no lineal.
FC.S
Orms
= [l + (1 + k)Gm]- ILmm V
(3.15)
Aunque hay que recordar que esta expresión sólo es válida cuando ILm, se presenta en D,, y de no ser así es necesario graficar la ecuación (3.15) para conocer el valor máximo de la comente en el inductor (ZLm,). En la figura 3.6 se muestra la variación del esfuerzo en comente ante una carga puramente resistiva (FC = 4) en función de la tensión de entrada y la potencia aparente de salida para k0 .12 , V0,=120 V y G,=V,dV,.
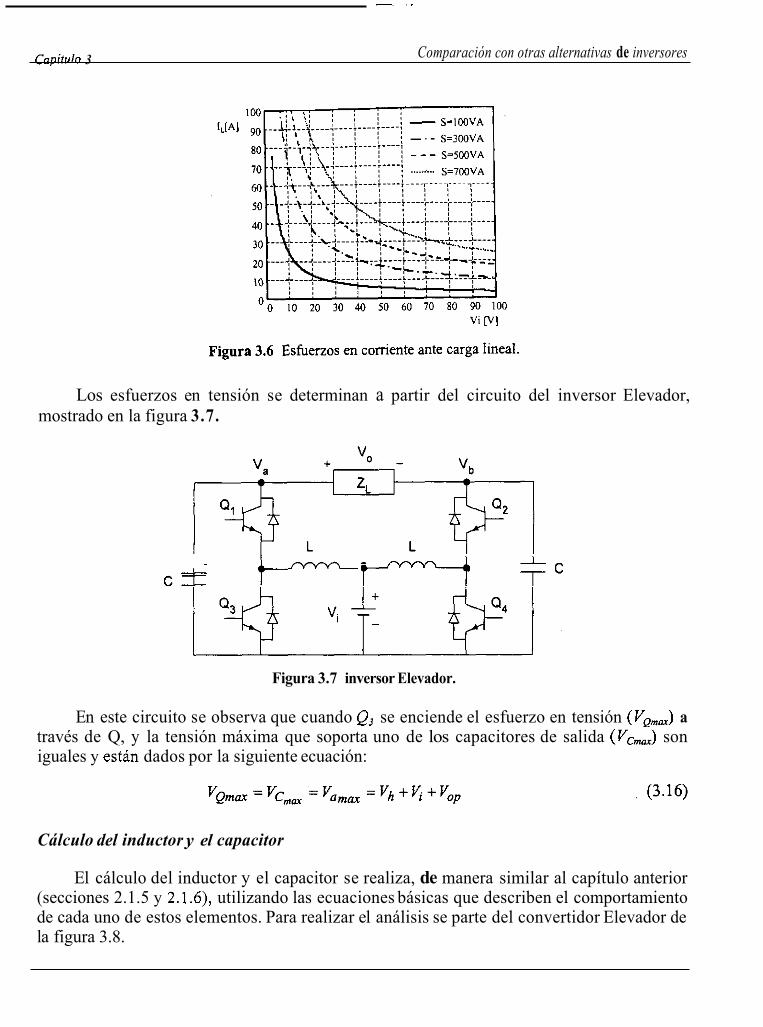
Comparación con otras alternativas de inversores Cupítulo 3
Los esfuerzos en tensión se determinan a partir del circuito del inversor Elevador, mostrado en la figura 3.7.
- _L
c L T T - - t T C
T Figura 3.7 inversor Elevador.
En este circuito se observa que cuando Q, se enciende el esfuerzo en tensión (V&,) a través de Q, y la tensión máxima que soporta uno de los capacitores de salida (VCma) son iguales y estAn dados por la siguiente ecuación:
Cálculo del inductor y el capacitor
El cálculo del inductor y el capacitor se realiza, de manera similar al capítulo anterior (secciones 2.1.5 y 2.1.6), utilizando las ecuaciones básicas que describen el comportamiento de cada uno de estos elementos. Para realizar el análisis se parte del convertidor Elevador de la figura 3.8.
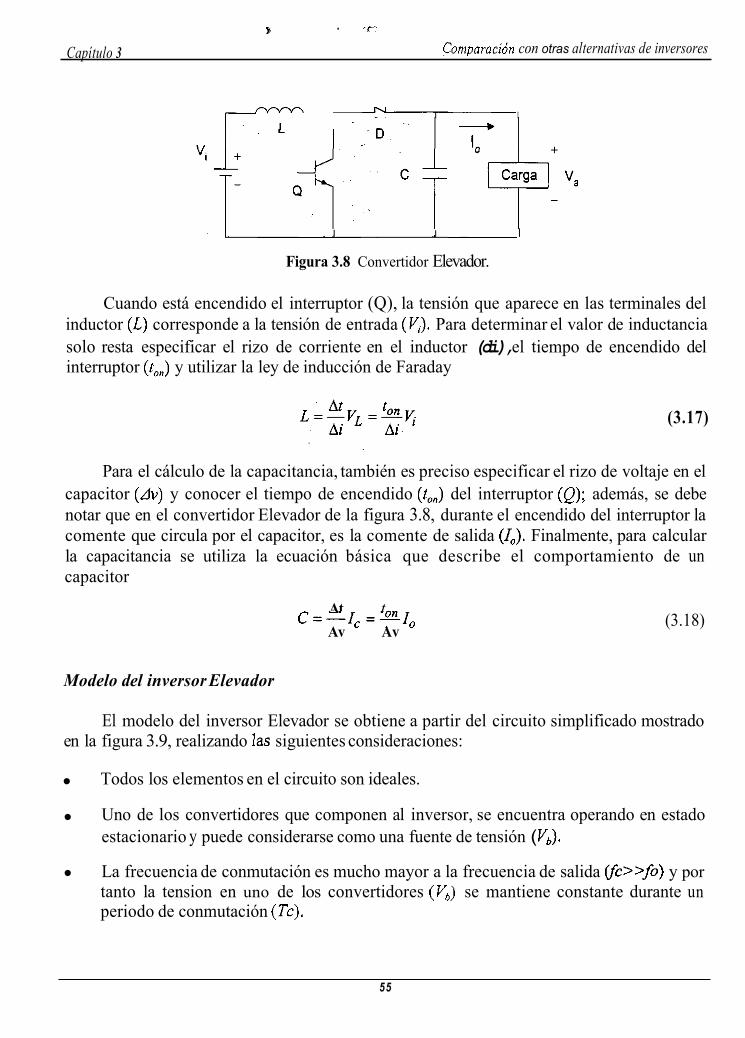
. ,r. z
Capítulo 3 Comparacibn con otras alternativas de inversores
r \ l I I
I
I I I
Figura 3.8 Convertidor Elevador.
Cuando está encendido el interruptor (Q), la tensión que aparece en las terminales del inductor (L ) corresponde a la tensión de entrada (K). Para determinar el valor de inductancia solo resta especificar el rizo de corriente en el inductor (di), el tiempo de encendido del interruptor (ton) y utilizar la ley de inducción de Faraday
(3.17)
Para el cálculo de la capacitancia, también es preciso especificar el rizo de voltaje en el capacitor (Av) y conocer el tiempo de encendido (ton) del interruptor (e); además, se debe notar que en el convertidor Elevador de la figura 3.8, durante el encendido del interruptor la comente que circula por el capacitor, es la comente de salida (Zo). Finalmente, para calcular la capacitancia se utiliza la ecuación básica que describe el comportamiento de un capacitor
At t Av
C=-I - S I o Av c - (3.18)
Modelo del inversor Elevador
El modelo del inversor Elevador se obtiene a partir del circuito simplificado mostrado en la figura 3.9, realizando las siguientes consideraciones:
Todos los elementos en el circuito son ideales.
Uno de los convertidores que componen al inversor, se encuentra operando en estado estacionario y puede considerarse como una fuente de tensión ( Vb).
La frecuencia de conmutación es mucho mayor a la frecuencia de salida cfc>>fo) y por tanto la tension en uno de los convertidores (Vb) se mantiene constante durante un periodo de conmutación (Tc).
55
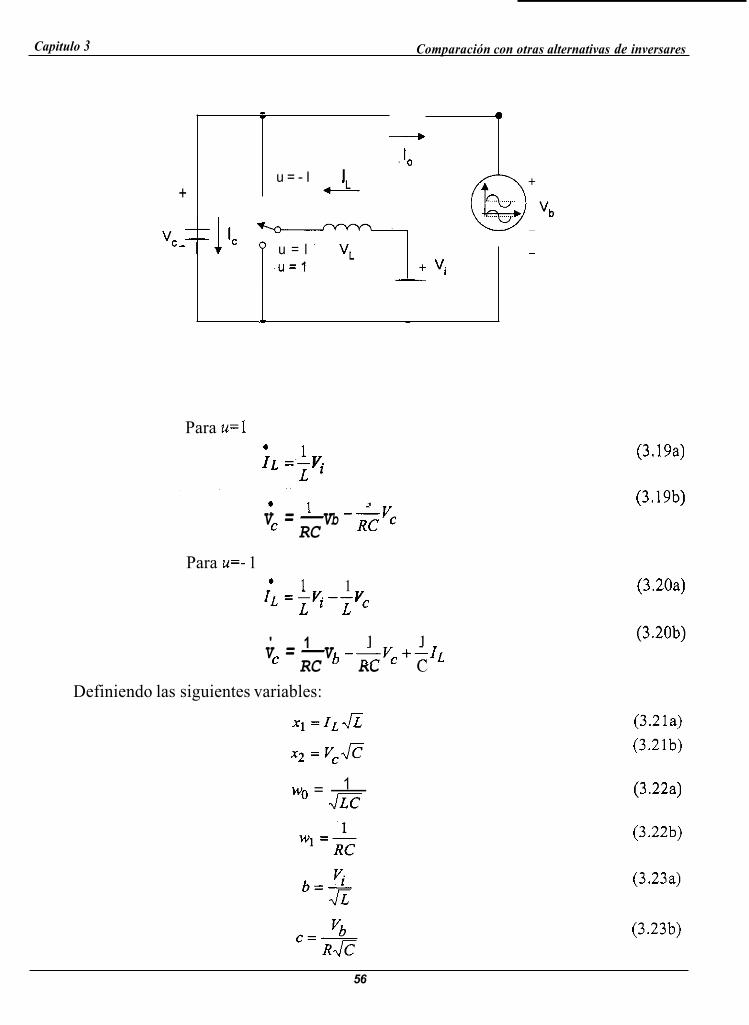
Comparación con otras alternativas de inversares Capitulo 3
+
VC -
- - O
4
. lo u = - I I
,L Q+Vb 'L..
-b ---T--l+ u = l -
vi -
* - -
Para u=l * 1 IL =-V.
L '
* 1 1 v =-v b -zvc RC
Para u=- 1 - 1 1 1, = -v. --v
L ' L C
' 1 v =-v 1 1 RC RC C
b --vc +-IL
Definiendo las siguientes variables:
X I =I,J¿
x2 = vcJc 1 wo = - JLC
(3.19a)
(3.19b)
(3.20a)
(3.20b)
(3.21a) (3.21b)
(3.22a)
(3.22b)
(3.23a)
(3.23b)
56
Capítulo 3 Comparación con otras alternativas de inversores
Se obtiene el siguiente modelo en forma matricial:
O su representación equivalente
. x = A x + B x u + C
(3.24)
(3.25)
En [22] e l modelo se representa con la forma dada por (3.25), sin embargo con fines ilustrativos aquí se utiliza una representación alternativa dada por la siguiente ecuación .
x = f(x) + g(x)u (3.26)
donde, obviamente:
Y
f(x) = Ax + C
g(x) = BX
(3.27)
(3.28)
3.1.2 Diseño del controlador
El diseño del controlador por modos deslizantes de acuerdo con [lo] está dividido en dos etapas:
Proponer una superficie deslizante tal que el sistema original restringido a esta superficie responda en la manera deseada.
Desarrollar una ley de control que satisfaga un conjunto de condiciones que garantizan la existencia del modo deslizante.
Es importante señalar que la superficie deslizante y la estructura de la ley de control para el controlador del inversor Elevador son idénticas a las propuestas en el inversor Reductor-Elevador.

Capítulo 3 Comparación con otras alternativas de inversores
La superficie deslizante es lineal y esta dada por
cT=sx-sxr =sxe = o donde:
s = [si , s2 1 = parhetros del controlador
x = [xi , x2 IT = variables de estado
xr = [X I , . , ~ 2 , . IT = referencias para las variables de estado
X e =[rile , x z e ] T = [ x l - x l r , x2-xzrIT =errores en las variablesde estado
Y la ley de control propuesta (u), es
u = u e q + U N
donde: -1 para g > O
1 para g<O U N =-s@(C) =
(3.29)
(3.30)
(3.31)
Del capítulo anterior, para verificar la condición de existencia del régimen deslizante se debe satisfacer la siguiente desigualdad: .
cTD( o (3.32)
De acuerdo con la ecuación (2.47), la primera derivada de la superficie deslizante esta dada por:
(3.33)
tal como se muestra en [22].
AI sustituir la superficie deslizante y su primera derivada respectivamente en (3.32) se encuentra que la condición necesaria para la existencia del régimen deslizante es:
sBx)O (3.34)
Sustituyendo las matrices y vectores involucrados en (3.34) se obtiene la condición a
SIX2 - s2x1) 0 (3.35)
satisfacer para asegurar la existencia del régimen deslizante.
Sustituyendo (3.21a) y (3.21b) en (3.35) se logra determinar los parámetros del controlador de una forma más explícita
s1 . Vc( t ) . E- s* . Z L ( t ) . JL) o (3.36)

Capitulo 3 Comparación con otras alternativas de inversares
Donde, V,(t) representa la tensión de salida en uno de los convertidores (Va o Vb) y como se puede apreciar en la figura 3;i(a) es positiva en todo momento, mientras que fL(t) representa la comente en el inductor y de acuerdo con la figura 3.5 puede ser tanto positiva como negativa.
Los parámetros del controlador que satisfacen la condición de existencia se determinan mediante la ecuación (3.37), proponiendo un valor para s, y encontrando el valor en s2 que cumple la siguiente desigualdad:
Sin olvidar que para satisfacer la condición cociente entre sI y s2.
3.1.3 Simulaciones
(3.37)
de existencia únicamente importa el
A continuación se presentan algunas simulaciones realizadas en Simnon del inversor Elevador y el controlador por modos deslizantes. En la figura 3.10 se muestra una simulación realizada con parámetros en el controlador s,=0.8 y s2=l, que de acuerdo con la ecuación (3.37) cumplen la condición de existencia.
Ilb
( 4 Cb) Figura 3.10 Simulación realizada con s,=O.8 y s,=l. (a) Voltaje en el capacitor (Vc)
y comente en el inductor (iJ @) Comente de salida (io) y plano de fase.
En esta simulación (figura 3.10(a)), se observa como la tensión en el capacitor tiene un buen seguimiento de la referencia. Y en el plano de fase (figura 3.10(b)) se aprecia como el sistema alcanza la superficie deslizante y se mantiene dentro de ella. En este caso, la superficie deslizante nuevamente es una recta que pasa por el origen del plano de fase. Una segunda simulación (figura 3.11) con sl=0.3 y s,=l, muestra lo que ocurre cuando los parámetros del controlador no cumplen la condición de existencia.
59

o om om
(4 (b) Figura 3.11 Simulación realizada con y0.3 y s,=l. (a) Voltaje en el capacitor (V,)
y comente en el inductor (IL). (b) Comente de salida (io) y plano de fase.
En esta simulación (figura 3.11(a)) se observa como se distorsionan la comente en el inductor y el voltaje en el capacitor durante las crestas, ya que es precisamente en estos instantes cuando no se cumple la condición de existencia.
Finalmente, una tercera simulación (figura 3.12) muestra la respuesta dinámica del inversor Elevador, controlado por modos deslizantes, ante cambios de carga. En este caso los - parámetros del controlador son s,=0.8, s,=l y los cambios de carga son entre R=144n y R=72Q.
(4 (b) Figura 3.12 Simulación ante cambios de carga (s,=0.8 y s,=l). (a) Voltaje del capacitor (V,)
y comente del inductor (IL). @) Comente de salida (I,) y plano de fase. 60

Capítulo 3 Comparación con otras alternativas de inversores
En esta simulación (figura 3.12(a)) se aprecian solamente ligeras distorsiones en la tensión del capacitor (V,) ante los cambios de carga, lo que demuestra la rápida repuesta dinámica que se consigue en el inversor Elevador al implaentar una estrategia de control por modos deslizantes.
3.1.4 Resultados experimentales Con la finalidad de realizar el análisis comparativo, no solo de manera teórica sino también en
forma expimental, se utilizó un prototipo del inversor Elevador desmllado previamente por N. Vázquez, como parte de su tesis de maestría [22], para obtener los resultados expainentales bajo las mismas condiciones de prueba que el inversor Reductor-Elevador.
En la figura 3.13 se presentan las principales formas de onda del inversor Elevador ante una carga lineal con una potencia de salida, Po=300Watts. La distorsión armónica total (THD) en la tensión de salida, en esta prueba, fue del 4.8%.
(a) (b) Figura 3.13 Principales formas de onda del inversor Elevador para P0=300 W
(a) Voltaje de salida (V,) y comente de salida (Io). @)Voltaje de salida (V,) y comente en el inductor (IL).
La respuesta del inversor Elevador ante cambios de carga entre potencias de salida de 100 y 200 Watts, aparece en la figura 3.14.
rek~un: m a w s H I- - TeRRun: IO .OkS Is H I R i I
MUhl t O O p 2%" (b)
Math1 ! O O p If"" (a)
Figura 3.14 Formas de onda ante cambios de carga ( Po=lOOW y P0=200 W). (a) Voltaje de salida (V,) y corriente de salida (Io). @)Voltaje de salida (V,) y comente en el inductor (IL).
61

Capítulo 3 Comparacrón con otras alternativas de inversores
En esta figura se aprecia que el tiempo de establecimiento en la tensión de salida ante los cambios de carga es aproximadamente de lms; esto demuestra experimentalmente la kpida respuesta del mversor Elevador, controlado por modos deslizantes.
En la figura 3.15 se muestran la tensión de salida, la comente de salida y la comente en uno de los inductores del inversor Elevador para una carga no lineal con una potencia aparente de 133 VA. La carga no lineal, al igual que en el inversor Reductor-Elevador, esta formada por un circuito rectificador con un capacitor de 220 ,uF y una resistencia de 240 R. Y en este caso la tensión de salida presenta una distorsión armónica total (THD) del 5.6%.
(4 @) Figura 3.15 Formas de onda ante carga no lineal para P0=133VA. (a) Voltaje de salida (Y,) y comente de
salida (Io). @)Voltaje de salida (V,) y comente en el inductor (IL).
Por último, en la figura 3.16 se muestran las curvas de eficiencia (q) y distorsión armónica total (THD). En esta figura se puede. apreciar que el inversor Elevador tiene una eficiencia máxima del 86% para una P0=200W y una THD máxima del 4.8% para una P0=300W con carga lineal.
95
____ I
q [%/,I
, I
4
80
75 ..' ,
j ! ~
70
i ! 6550 ;O0 I50 200 250 300 250 100 150 200 250 300
Po [WI Po [WI (4 @)
Figura 3.16 Curvas características del inversor Elevador. (a) Eficiencia (q). @) Distorsión armónica total (THD).
62

. . . , . . . . . . . . .
Capíiulo 3
3.2 EL INVERSOR REDUCTOR
Comparación con otras aliernaiivas de inversores
Convertidor Reductor
A
3.2.1 Análisis y diseño
El inversor Reductor está formado por dos convertidores CD-CD del tipo reductor, bidireccionales en corriente, alimentando a la carga en modo diferencial (figura 3.17(a)). Cada convertidor genera una tensión formada por un nivel de CD (Vcd) y una componente senoidal a la frecuencia de la tensión de salida (figura 3.17(b)). Para maximizar la excursión de tensión a través de la carga, las componentes senoidales de los convertidores A y B se encuentran defasadas 180’ una respecto a otra. Ambos convertidores operan en modo de conducción continua y se controlan de manera independiente, es decir hay un conúolador para cada convertidor.
Convertidor Reductor
B va ‘b
- - . ‘av, 1 .................................... _.______________I
I v. t va v. lii=-.’.? ....................................................
O
‘bV, ....................................................
...............................................
................................................
................................................
................................................
t O
...............................................
...............................................
................................................ O
‘bV, 1 ..................... ...............................I v. f ................................................
................................................ .s/i\;r ................................................
t O
v, .............................................. ,m .................................................
............................................... t
O
(b) Figura 3.17 El inversor Reductor. (a) Convertidores Reductores alimentando a la carga en modo
diferencial. @) Tensión en los convertidores y tensión de salida.
La tensión en cada convertidor está dada, respectivamente, por:
.r
(3.38)
(3.39)
Y el nivel de CD (V,) que genera cada convertidor es:
(3.40)

Capitulo 3 Comparación con otras alternativas de inversores
donde: Vh = k * Vop (3.41) Vh = Voltaje de holgura. k = Factor de holgura.
De acuerdo con la figura 3.17@), el valor mínimo en el nivel de CD ( Vcd) que genera cada convertidor, es:
(3.42)
Utilizando la definición de ganancia máxima (G,,,=V0,,W.), se puede expresar el nivel de CD (V,) en la siguiente forma:
(3.43) 1 2
ved =(k+-)GmV,
Ganancia
Partiendo de las ecuaciones (3.44) y (3.45), que describen el comportamiento del convertidor Reductor de la figura 3.18, es posible determinar la ganancia del inversor Reductor.
I L = Io
"a
"¡_L. Q ' 1 T D T-
l -
(3.44)
(3.45)
Figura 3.18 Convertidor Reductor.
Dado que el nivel de CD (Ved) en ambos convertidores es el mismo y las componentes
(3.46)
senoidales se encuentran defasadas 1 80°, la tensión de salida es: vo = 2va - 2 v , d
La ganancia del inversor Reductor se obtiene sustituyendo (3.43) y (3.44) en (3.46).
(3.47)
64

I I Comparación con oiras aliernaiivas de inversores Capitula 3 I
La Gn,=0.81
gráfica de y k0 .12 .
la ganancia en el inversor Reductor se muestra I
en la figura 3.19, con
D
I . . Figura 3.19 Ganancia del inversor Reductor.
Ciclo de trabajo I El ciclo de trabajo, se obtiene despejando D en (3.44) y sustituyendo (3.38), (3.43) y
G, = VoJV,. I Vcd + - S e n d VOP
2 ' = kGm + -(I Gm + S e n d ) D = v, 2
El ciclo de trabajo máximo se encuentra a partir de (3.48).
(3.48)
(3.49)
El comportamiento del ciclo de trabajo se muestra en la figura 3.20 para Gm=0.81 y k0.12. I
1 : ; ; ; ; i ; ; ; D , , I I I < I I I
I I , I I , I I I I
' 0 3 6 (9 I 2 I S I S 2 1 24 27 30 t [ml
Figura 3!20 Ciclo de trabajo

Capitulo 3 Comparación con otras alternativas de inversores
Corriente en el inductor
Para determinar la comente en el inductor, es preciso partir de (3.45), utilizar la ley de Ohm (I,=VJR) y sustituir la ecuación (3.47)
I L = [ 2 0 - (1 + 2k)Gm]- v, R
(3.50)
Sustituyendo (3.48) en (3.50) se determina la evolución de la comente en el inductor (figura 3.21) para V,=210V, R=480, G,,,=0.81 y kO.12.
1 w51
Figura 3.21 Comente en el inductor.
Esfuerzos en los semiconductores
Sustituyendo (3.49) en (3.50) se obtiene el esfuerzo en comente a través de los semiconductores
Para determinar los esfuerzos en comente ante expresar la comente pico de salida en términos de la cresta (FC) de la carga, con lo cual se obtiene:
- FC.S ILma --
I>N vo
(3.51)
carga lineal y no lineal, basta con potencia aparente (S) y el factor de
(3.52)
Nuevamente hay que recordar que esta expresión sólo es válida cuando ZLma se presenta en D,, y de no ser así es necesario graficar la ecuación (3.50) para conocer el valor máximo de la comente en el inductor (ZLmm).La variación del esfuerzo en comente ante una carga lineal ( F C =A), en función de la tensión de entrada y diferentes potencias de salida, se muestra en la figura 3.22 para Vom,=12OV.
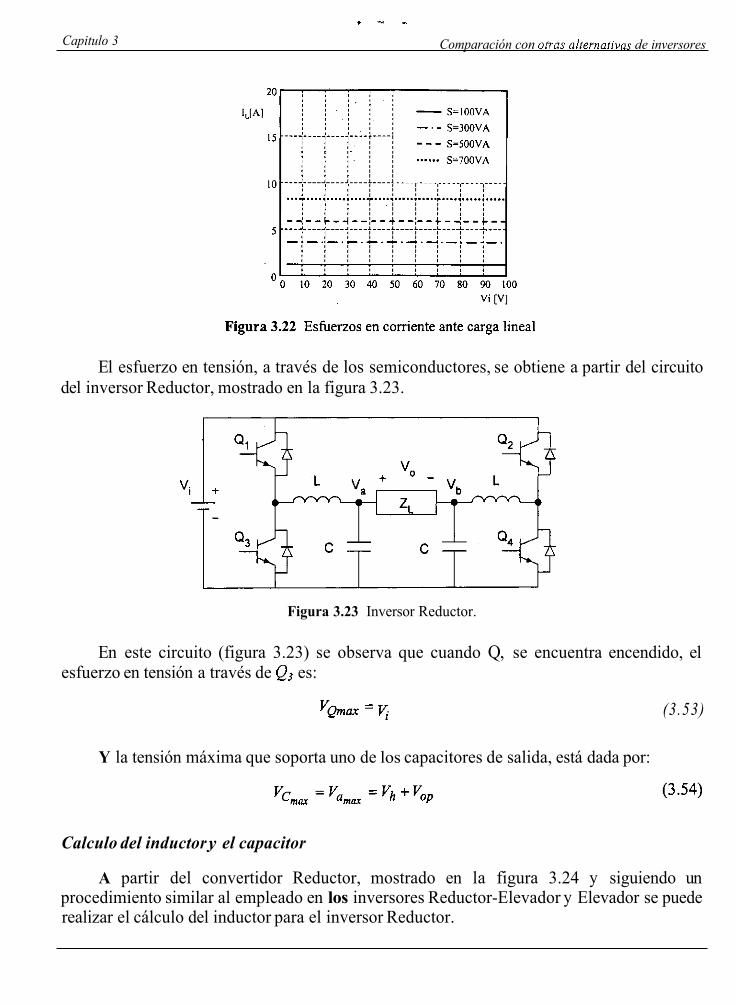
* w* ~
Capitulo 3 Comparación con ohas al~ernativas de inversores
El esfuerzo en tensión, a través de los semiconductores, se obtiene a partir del circuito del inversor Reductor, mostrado en la figura 3.23.
Figura 3.23 Inversor Reductor.
En este circuito (figura 3.23) se observa que cuando Q, se encuentra encendido, el esfuerzo en tensión a través de Q, es:
VQmm = (3.53)
Y la tensión máxima que soporta uno de los capacitores de salida, está dada por:
Calculo del inductor y el capacitor
A partir del convertidor Reductor, mostrado en la figura 3.24 y siguiendo un procedimiento similar al empleado en los inversores Reductor-Elevador y Elevador se puede realizar el cálculo del inductor para el inversor Reductor.

Capitulo 3 Comparación con otras alternativas de inversores
V i L J I T-
1 L
T C
71 j/ Carga V,
Figura 3.24 Convertidor Reductor
En el convertidor Reductor de la figura 3.24, durante el encendido del interruptor (Q) la tensión máxima que aparece en las terminales del inductor (L) es la diferencia entre la tensión de entrada y la tensión de salida mínima (V,-Vami,,) (hay que recordar que por definición la tension de salida V,, es variable y su valor mínimo es VOm,,=Vh). De esta manera, para determinar la inductancia mínima necesaria para mantener el rizo de comente (di), ante cualquier valor en la tensión de salida, basta con especificar el tiempo de encendido del interruptor (ton), la tensión de salida mínima (VA) y utilizar la ley de inducción de Faraday.
Ar I
Ai Ai Ai L = -v, = -(vi - Vami") = fi(K - Vh) (3.55)
El procedimiento para el cálculo del capacitor en el inversor Reductor, es diferente al utilizado en los inversores Reductor-Elevador y Elevador, ya que en este caso la comente que circula en el capacitor, durante el encendido del interruptor (Q) no es la comente de salida.
De acuerdo con [23], el rizo de tensión en un convertidor Reductor está dado por:
AQ 1 1 AIL TC AV --= a - c c 2 2 2 (3.56)
Despejando C de (3.56) se obtiene la expresión que determina el valor del capacitor
ML C = -Tc 8Av
(3.57)
Pero, debido a que el controlador por modos deslizantes opera a frecuencia variable, y en consecuencia el período de conmutación también es variable, no es posible utilizar la ecuación para calcular directamente el valor del capacitor.
(3.57)
68

Capítulo 3 Comparación con otros alternaiivas de inversores
Sin embargo, la ecuación 3.57 se puede expresar de una manera más clara y que facilita el cálculo, sustituyendo (3.58), el ciclo de trabajo (O), y (3.44) en (3.57)
con lo cual se obtiene :
(3.58)
(3.59)
De acuerdo con (3.38), la tensión de salida en uno de los convertidores también es variable y la ecuación (3.59) tampoco permite calcular el valor del capacitor en forma directa. No obstante, la ecuación 3.59 permite visualizar que la capacitancia máxima se presenta cuando la tensión en uno de los convertidores (V,) es mínima, es decir cuando V,=V,. De tal modo que la capacitancia mínima necesaria, para mantener el rizo de voltaje (Av) en el valor deseado ante cualquier tensión de salida (Va), se puede calcular mediante la siguiente fórmula
(3.60)
Modelo del inversor Reductor
Del circuito simplificado del inversor Reductor, mostrado en la figura 3.25, se obtiene el modelo del inversor, realizando las siguientes consideraciones:
Todos los elementos en el circuito son ideales. Uno de los convertidores se encuentra operando en estado estacionario y se puede considerar como una fuente de tensión (Vb). La frecuencia de conmutación es mucho mayor a la frecuencia de salida vc>>fo) y por tanto la tensión en uno de los convertidores (Vb) se mantiene constante durante un período de conmutación (Tc).
Figura 3.25 Circuito simplificado del inversor Reductor. 69
Capitulo 3 Comparación can otras alternativas de inversores
Las ecuaciones que definen el comportamiento del circuito, mostrado en la figura 3.25, para cada una de las posiciones del interruptor son las siguientes:
Para u=l
(3.6 1 a) * I 1 1, = -v. --v L ' L e .
I I I v =-Vb--Vc+-IL RC RC C
Para u=- 1 . I I L = --V L e
1 1 RC RC C
b--V,+-IL * 1 v =-v
Definiendo las siguientes variables:
xl =
x2 = vcJC 1 wo = -
4%
Se obtiene el siguiente modelo en forma matricial:
O su representación alternativa: . x = Ax + Bu i C
(3.6 1 b)
(3.62a)
(3.6213)
(3.63a) (3.63b)
(3.64a)
(3.64b)
(3.65a)
(3.65b)
(3.66)
(3.67) Aunque por conveniencia se representa el modelo del inversor Reductor en la siguiente
forma . x = f(x) + g(x)u (3.68)
70
Capitulo 3 . . . : Comparación con otras alternativas de inversores .', "'.*i,.: : - :,,. ',._; .. . ..
< . .. donde:
.Y f(x) = AX + C . . . (3.69)
g(x) = B (3.70)
3.2.2 Diseño del controlador
De acuerdo con la sección 2.4, el diseño del controlador por modos deslizantes, está
Proponer una superficie deslizante tal que el sistema original resiringido a esta superficie responda en la manera deseada. Desarrollar una ley de control que satisfaga un conjunto de condiciones que garantizan la existencia del modo deslizante.
La superficie deslizante y la estmctura de la ley de control para el controlador del inversor
dividido en las siguientes dos etapas: :.'
Reductor, nuevamente son las mismas que en los inversores Reductor-Elevador y Elevador.
La superficie deslizante (a) es: 0 = sx-sxr = sx, = o
donde: s = [SI , s2 ] = parámetros del controlador
x = [xi , x2IT = variablesde estado
xr = [xlr , x2,IT = referencias para las variablesde estado
Xe = [x le , qe] T = [xl-xlr , ~ 2 - 1 2 ~ 1 ~ = errores en las variables de estado
Y la ley de control (u), es: u = ueq +UN
donde:
(3.71)
(3.72)
(3.73)
De acuerdo con la sección 2.4.3, para asegurar la existencia del régimen deslizante se debe satisfacer la siguiente desigualdad: .
CO(O (3.74)
Utilizando la ecuación (2.47) se obtiene la primer derivada de la superficie deslizante
(3.75)

Capilulo 3 Comparación con otras alternativas de inversores
Y ai sustituir la superficie deslizante y su primera derivada en (3.74) se encuentra:
4
sB)O (3.76)
Sustituyendo las matrices y vectores involucrados en (3.76) se obtiene la condición a satisfacer para asegurar la existencia del régimen deslizante.
s ib) 0 (3.77)
Vi W O
donde: b=-
Debido a que la constante b es positiva, para cumplir la condición de existencia, el parámetro s, debe ser mayor a cero. Respecto a los parámetros en el controlador en el límite de la condición de existencia, obviamente son s,=O y cualquier valor para s2.
3.2.3 Simulaciones
En este caso, también se realizaron algunas simulaciones en Simnon para verificar que el comportamiento del inversor Reductor controlado por modos deslizantes sea satisfactorio.
La figura 3.26 muestra una simulación con parámetros en el controlador que cumplen la condición de existencia (s,=0.8 y s2=l).
O on am 08, 1
I
(a) (b) Figura 3.26 Simulación realizada con s,=O.8 y s,=l. (a) Voltaje en el capacitor (V,)
y comente en el inductor (IL). @) Comente de salida (Io) y plano de fase.

Capitulo 3 Comparación con otras alternativas de inversores .. ..,. .;, 1 . . :. , . . .
En la simulación anterior (figura 3.26(a))i se puede apreciar el buen seguimiento entre la tensión en el capacitor ( Vc), la corriente en e¡ inductor (I,) y sus respectivas referencias. Este seguimiento también se puede observar en la figura 3.26(b) y equivale a que el sistema se mantenga en el origen del piano de fase. Por otro lado, es importante notar que la comente en el inductor (I,) corresponde a la comente de salida (I,) del inversor.
La simulación mostrada en la figura 3.27 se realizó con s,=-0.02 y s,=l y muestra lo que ocurre cuando los uarámetros del controlador no cumplen la condición de existencia.
o om om om 1
Figura 3.27 Simulación realizada con s,=-0.02 y s,=l. (a) Voltaje en el capacitor (V,) y comente en el inductor (IL). (b) Comente de salida (I,) y plano de fase.
En la figura 3.27(a) se observa claramente que al no cumplir la condición de existencia el voltaje en el capacitor y la comente el inductor se distorsionan y no presentan un buen seguimiento de sus respectivas referencias. Mientras que en el plano de fase de la figura 3.27(b) se puede ver que este comportamiento equivale a que el sistema oscile alrededor del origen.
Por Último, en la figura 3.28 se muestra una simulación de la respuesta del inversor Reductor ante cambios de carga entre R=144R y R=72R, con parámetros en el controlador que cumplen la condición de existencia s,=0.8 y s,=l.
Además, en la figura 3.28 se muestra la rápida respuesta dinámica que se consigue al implementar una estrategia de control por modos deslizantes ya que es posible conmutar la carga, incluso cada medio ciclo de linea sin que se presenten distorsiones significativas en el voltaje del capacitor ( Vc).
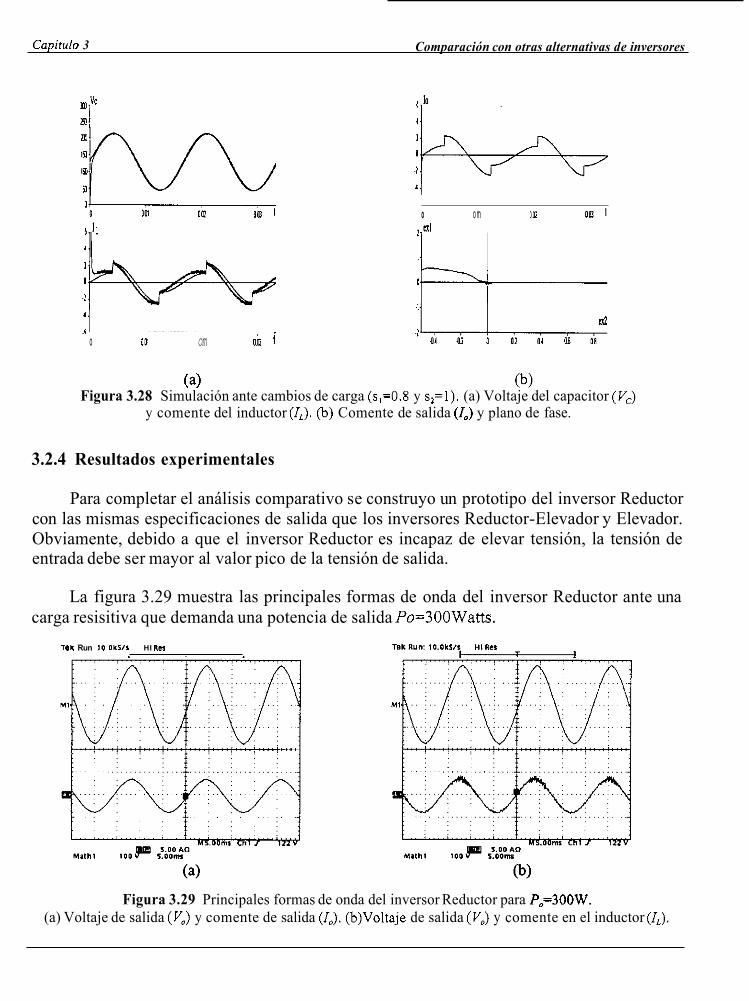
capilulo 3 Comparación con otras alternativas de inversores
ai'
o i m om ob 1
o o m QU
(a) (b) Figura 3.28 Simulación ante cambios de carga (s,=O.8 y s,=l). (a) Voltaje del capacitor (V,)
y comente del inductor (IL). @) Comente de salida (Io) y plano de fase.
3.2.4 Resultados experimentales
Para completar el análisis comparativo se construyo un prototipo del inversor Reductor con las mismas especificaciones de salida que los inversores Reductor-Elevador y Elevador. Obviamente, debido a que el inversor Reductor es incapaz de elevar tensión, la tensión de entrada debe ser mayor al valor pico de la tensión de salida.
La figura 3.29 muestra las principales formas de onda del inversor Reductor ante una carga resisitiva que demanda una potencia de salida Po=300Watts.
TeX Run 10 O k W HI R n
Figura 3.29 Principales formas de onda del inversor Reductor para P0=3O0W. (a) Voltaje de salida (V,) y comente de salida (Io). @)Voltaje de salida (V,) y comente en el inductor (I').

Capitulo 3 Comparación con otras alternativas de inversores
En esta prueba, se obtuvo una distorsión armónica total (THD) en la tensión de salida del 5.1%. Además es de notar que la corriente en el inductor (IL) y la comente de salida (I,) cenan prácticamente iguales, sino fuera por el rizo de comente presente en la comente del inductor.
La figura 3.30 muestra la respuesta del inversor Reductor ante cambios de carga entre potencias de salida de 100 y 200 Watts. De la figura 3.30 nuevamente puede concluirse que el controlador por modos deslizantes le proporciona rápida respuesta dinámica al inversor Reductor, ya que el tiempo necesario para recuperarse de los cambios de carga es menor a lms.
TIUR"" IO ou/: " IR" ,
Figura 3.30 Formas de onda ante cambios de carga ( fo=l0OW y f0=200 W). (a) Voltaje de salida (Y,) y comente de salida (io). @)Voltaje de salida (V,) y comente en el inductor (IL),
En la figura 3.31 se presentan los resultados obtenidos en el inversor Reductor, ante una carga no lineal. Nuevamente la carga no lineal demanda una potencia aparente de 133VA y esta formada por un circuito rectificador con un filtro capacitivo de 220,uF y una resistencia de carga de 240Q.
Te& RY": IO.OUI,i "1 Fc" TmRun: 1o.ou/1 H I R n - I
. . . . . . . . . . .
. . .
Math1 l o o p 2%" (4 (b)
Figura 3.31 Formas de onda ante carga no lineal para f0=133VA. (a) Voltaje y comente de salida. @)Voltaje de salida (V,) y comenté en el inductor (iJ.

Capitulo 3 Comparación con otras alternativas de inversores
En esta prueba (figura 3.31(a)), la distorsión armónica total (THD) en la tensión de salida fue del 5.7%. También resulta interesante notar, que a diferencia de los inversores Reductor-Elevador y Elevador, en este caso la comente en el inductor (Z,) ante carga no lineal (figura 3.3 I(b)), es similar a la comente de salida (ZJ.
Finalmente, en la figura 3.32 se muestran las curvas de eficiencia (q) y distorsión armónica total (THD) en función de la potencia de salida para el inversor Reductor. El inversor Reductor presenta una eficiencia máxima del 93% para una P0=200W y una THD máxima del 6% para una P0=250W.
Figura 3.32 Curvas caractensticas del inversor Reductor. (a) Eficiencia (q), (b) Distorsión armónica total (THD).
3.3 ANALISIS COMPARATIVO
Para realizar este análisis comparativo fue necesario construir un prototipo del inversor Reductor, además del inversor Reductor-Elevador, y utilizar un prototipo del inversor Elevador desarrollado por N. Vázquez como parte de su tesis de maestría [22]. Todos los prototipos cuentan con un controlador por modos deslizantes con la misma superficie deslizante y estructura para la ley de control. En todo momento se ha tratado de normalizar el diseño, la construcción y las pruebas tanto de los inversores como de los controladores.
3.3.1 Eficiencia
En la figura 3.33, se muestran las curvas de eficiencia para los inversores Reductor- Elevador, Elevador, Reductor y una solución convencional en dos etapas. En esta figura se puede apreciar que el inversor Reductor presenta mayor eficiencia que los inversores Reductor-Elevador y Elevador. Sin embargo, la solución convencional en dos etapas formada por una etapa elevadora y el inversor Reductor tiene una eficiencia ligeramente menor que los inversores Reductor-Elevador y Elevador a pesar de que el inversor Reductor tiene muy buena eficiencia.

Capitulo 3 Comparación con otras alternativas de inversores . . . .
. . . . . . . . . .
Es importante señalar que no se' ha construido la etapa elevadora y únicamente para mostrar el efecto de la conexión de dos etapas en cascada, en la eficiencia total de la solución convencional, se ha supuesto que la etapa elevadora tiene una eficiencia muy buena (90%) que se mantiene constante durante todo el rango de potencia.
Por otro lado, aunque la curva de eficiencia de la solución en dos etapas presenta mejor eficiencia para baja potencia comparada con los inversores Reductor-Elevador y Elevador, este no es el comportamiento real y se debe a que se ha supuesto en la etapa elevadora una eficiencia constante, dentro de todo el rango de potencia.
50 100 150 200 250 300
Figura 3.33 Curvas de eficiencia.
0-1
Po [WI
3.3.2 Distorsión armónica total (THD) En la figura 3.34, se m u m la distorsión armónica de cada uno de los inversores en h c i ó n
de la potencia de salida. En esta figura se puede observar que en los tres inversores la distomión armónica se mantiene entre el 4 y 6 %. Evidentemente esto se debe a que en los tres inversores se ha utilizado una estrategia de coníml por modos deslizantes, lo que permite obtener una rápida respuesta dinámica y en consecuencia una baja distorsión armónica en cada uno de los inversores.
THD[%]
- <eductor Elevador
;"'""Or
- ........_ Reductor - - - I
50 100 150 200 250 300 L
Po [WI Figura 3.34 Curvas de distorsión armónica.
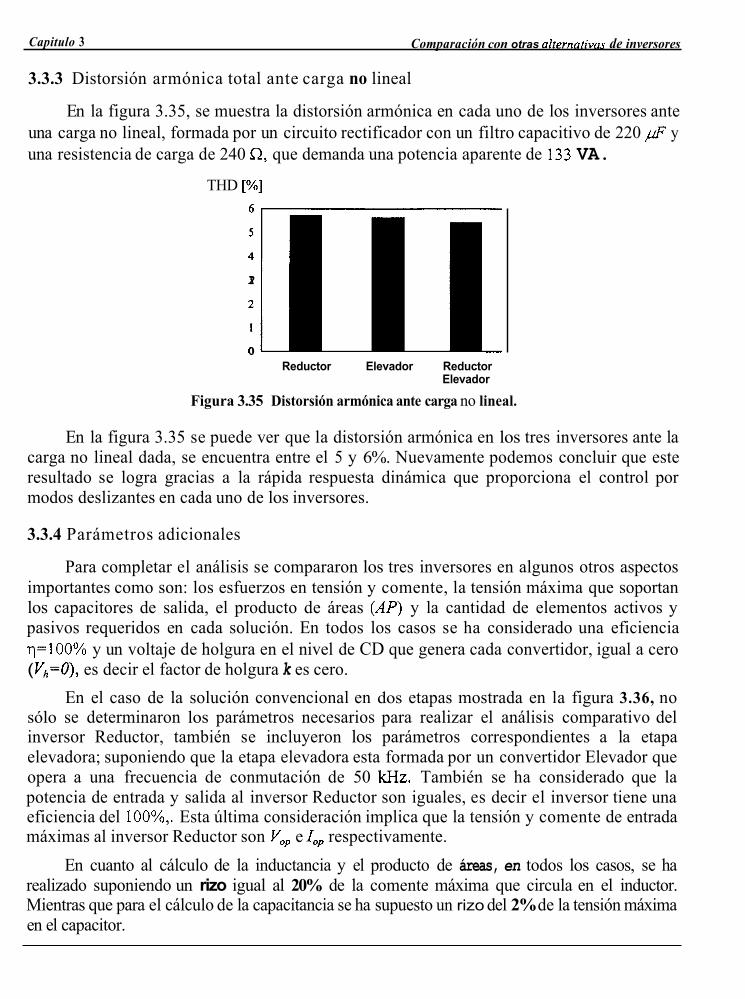
Capitulo 3 Comparación con otras alternativm de inversores
3.3.3 Distorsión armónica total ante carga no lineal
En la figura 3.35, se muestra la distorsión armónica en cada uno de los inversores ante una carga no lineal, formada por un circuito rectificador con un filtro capacitivo de 220 pF y una resistencia de carga de 240 Q, que demanda una potencia aparente de 133 VA.
THD [%I :m 2
I
O Reductor Elevador Reductor
Elevador
Figura 3.35 Distorsión armónica ante carga no lineal.
En la figura 3.35 se puede ver que la distorsión armónica en los tres inversores ante la carga no lineal dada, se encuentra entre el 5 y 6%. Nuevamente podemos concluir que este resultado se logra gracias a la rápida respuesta dinámica que proporciona el control por modos deslizantes en cada uno de los inversores.
3.3.4 Parámetros adicionales
Para completar el análisis se compararon los tres inversores en algunos otros aspectos importantes como son: los esfuerzos en tensión y comente, la tensión máxima que soportan los capacitores de salida, el producto de áreas (AP) y la cantidad de elementos activos y pasivos requeridos en cada solución. En todos los casos se ha considerado una eficiencia q=IOO% y un voltaje de holgura en el nivel de CD que genera cada convertidor, igual a cero ( Vh=O), es decir el factor de holgura k es cero.
En el caso de la solución convencional en dos etapas mostrada en la figura 3.36, no sólo se determinaron los parámetros necesarios para realizar el análisis comparativo del inversor Reductor, también se incluyeron los parámetros correspondientes a la etapa elevadora; suponiendo que la etapa elevadora esta formada por un convertidor Elevador que opera a una frecuencia de conmutación de 50 kHz. También se ha considerado que la potencia de entrada y salida al inversor Reductor son iguales, es decir el inversor tiene una eficiencia del loo%,. Esta última consideración implica que la tensión y comente de entrada máximas al inversor Reductor son V, e Z, respectivamente.
En cuanto al cálculo de la inductancia y el producto de áreas, en todos los casos, se ha realizado suponiendo un rizo igual al 20% de la comente máxima que circula en el inductor. Mientras que para el cálculo de la capacitancia se ha supuesto un rizo del 2% de la tensión máxima en el capacitor.

Capítulo 3 Comparación con otras alternativas de inversores
vi - -
lop. L
+ vo - + 'b
ZL I--+--- Q
-
- c --
En la tabla 3.1, se muestran los esfuerzos en comente para los inversores Reductor- Elevador, Elevador y la solución en dos etapas en términos de la ganancia máxima del inversor (C,= VoJq), normalizados respecto a la comente pico de salida (FCS/V,,), además de los esfuerzos en tensión, la tensión máxima que soportan los capacitores de salida, el producto de áreas y el número de componentes activos y pasivos requeridos en cada caso.
El producto de áreas (AP) es un parámetro que indica el tamaño y la cantidad de energía soportada por un núcleo dado y constituye un aspecto importante en el diseño y construcción de un inductor. En el apéndice A se muestra el procedimiento para el diseño magnético de los inductores, el cual incluye el cálculo del AP. Los componentes activos son todos aquellos dispositivos semiconductores utilizados y se han dividido específicamente en interruptores (e) y diodos (O). Mientras que los componentes pasivos están constituidos por inductores (L) y capacitores (C).
Tabla 3.1 Parámeiros adicionales del análisis comparativo

Capítulo 3 Comparación con otras alternativas de inversores
En la tabla 3.1, se puede observar que los inversores Reductor-Elevador y Elevador poseen casi las mismas características a excepción de la tensión máxima que soportan los capacitores de salida, la cual es menor en el inversor Reductor-Elevador. También se puede notar que el producto de áreas (AP) requerido en los inversores Reductor-Elevador y Elevador es menor aproximadamente en un 50% al que requiere una solución en dos etapas. Por otro lado, una solución en dos etapas requiere de un mayor número de componentes activos y pasivos que los inversores Elevador y Reductor-Elevador.
La principal ventaja de la solución en dos etapas es que los 4 semiconductores del inversor Reductor soportan un esfuerzo en comente unitario y el semiconductor, del convertidor Elevador, soporta un esfuerzo igual a G,; mientras que en los inversores con capacidad de elevación (Reductor-Elevador y Elevador) los 4 semiconductores soportan un esfuerzo en comente igual a l+G,,,.

CAPITULO 4
CONCLUSIONES
En este capítulo se presentan las conclusiones finales sobre el trabajo de investigación realizado. Estas conclusiones cubren los siguientes aspectos: el trabajo mismo de investigación, la comparación entre los inversores con capacidad de elevación (Reductor- Elevador y Elevador) y una solución en dos etapas, el controlador por modos deslizantes y por último la comparación entre los inversores Reductor-Elevador y Elevador. También se presentan los logros obtenidos con la realización del trabajo y algunos trabajos futuros dentro de la misma línea de investigación.
4.1 EL TRABAJO DE INVESTIGACI~N
El trabajo de investigación realizado presenta un estudio y análisis detallado del principio de funcionamiento y la operación del inversor Reductor-Elevador. Describe el desarrollo de un modelo y la implementación de una estrategia de control por modos deslizantes para el inversor. Incluye simulaciones y resultados experimentales obtenidos mediante un prototipo del inversor, además de un análisis comparativo entre los inversores Reductor-Elevador, Elevador y Reductor.
Para hacer posible la realización del análisis comparativo, fue necesario utilizar un prototipo del inversor Elevador desarrollado por N. Vázquez en [22] y construir prototipos de los inversores Reductor y Reductor-Elevador.
81

Capítulo 4 Conclusiones
En los tres inversores se utilizó una estrategia de control por modos deslizantes y se realizó una estandarización en la forma y los criterios utilizados para la construcción de los inversores y los controladores.
El presente trabajo de investigación permite establecer que en aplicaciones de baja potencia y donde no se requiere aislamiento galvánico el inversor Reductor-Elevador, constituye una buena alternativa de solución a la problemática en la etapa inversora de los sistemas fotovoltaicos y de alimentación inintemimpible ya que presentan buena eficiencia (máxima 85%) y rápida respuesta dinámica (transitorios ante cambios de carga menores a lms).
4.2 EL INVERSOR REDUCTOR-ELEVADOR Y EL INVERSOR ELEVADOR
Del análisis comparativo mostrado en la sección 3.3.4 se desprende que los inversores Reductor-Elevador y Elevador tienen los mismos esfuerzos en comente con lo cual se demuestra que la hipótesis inicial, de que los esfuerzos en comente del inversor Elevador podnan ser una consecuencia directa de la incapacidad de este inversor para generar tensiones de salida menores a la tensión de entrada, no es verdadera. Esto se debe fundamentalmente a dos razones. Por un lado a que la comente en el inductor para un convertidor Elevador esta dada por la misma expresión (ecuación 4.1) que para un convertidor Reductor-Elevador.
1 IL - Io 1-D
Y por otro lado a que la función de ganancia del convertidor Elevador tiene el mismo comportamiento que la del convertidor Reductor-Elevador solo que desplazada una cantidad igual a la tensión de entrada, como se puede apreciar en la figura 4.1. En consecuencia el ciclo de trabajo vana de la misma forma en ambos convertidores y la comente en el inductor y los esfuerzos en comente son idénticos.
, , , , , , I ,
6 VO vi Reductor Elevador ~ _ _ _ _
Elevador I I 4 ---- i _ _ _ _ - -
---
I I I , I , I I I I I I I I I I I I I I I I I I
-1 O 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
D
Figura 4.1 Curvas de ganancia para los convertidores Elevador y Reductor-Elevador.

Finalmente, es posible mostrar que sin alterar el principio de funcionamiento y modificando la topología original del invérsor Reductor-Elevador (figura 4.2(a)) se puede obtener una representación equivalente de este inversor (figura 4.2(b)) con una estructura myy similar al inversor Elevador mostrado en la figura 4.2(c).
c L L
zz ' ,-, zr c + --
vi --_
AI comparar el inversor Reductor-Elevador equivalente (figura 4.2(b)) con el inversor Elevador (figura 4.2(c)) se encuentra que estos inversores tienen una estructura muy similar y las diferencias entre ellos son mínimas.
Estas diferencias son las siguientes:
En el inversor Reductor-Elevador las comentes de entrada y salida son pulsantes, a diferencia del inversor Elevador, en el cual Únicamente la comente de salida es pulsante.
El inversor Reductor-Elevador requiere capacitores con menor especificación en tensión que el inversor Elevador.
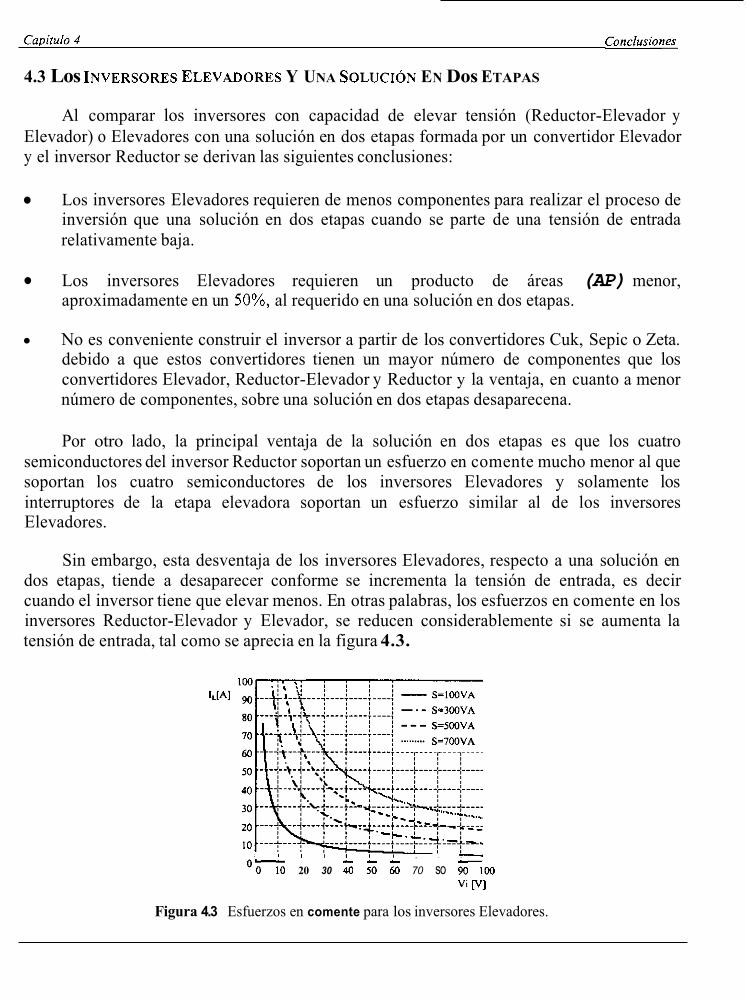
4.3 Los INVERSORES ELEVADORES Y UNA SOLUCI~N EN Dos ETAPAS
Al comparar los inversores con capacidad de elevar tensión (Reductor-Elevador y Elevador) o Elevadores con una solución en dos etapas formada por un convertidor Elevador y el inversor Reductor se derivan las siguientes conclusiones:
Los inversores Elevadores requieren de menos componentes para realizar el proceso de inversión que una solución en dos etapas cuando se parte de una tensión de entrada relativamente baja.
Los inversores Elevadores requieren un producto de áreas (AP) menor, aproximadamente en un 50%, al requerido en una solución en dos etapas.
No es conveniente construir el inversor a partir de los convertidores Cuk, Sepic o Zeta. debido a que estos convertidores tienen un mayor número de componentes que los convertidores Elevador, Reductor-Elevador y Reductor y la ventaja, en cuanto a menor número de componentes, sobre una solución en dos etapas desaparecena.
Por otro lado, la principal ventaja de la solución en dos etapas es que los cuatro semiconductores del inversor Reductor soportan un esfuerzo en comente mucho menor al que soportan los cuatro semiconductores de los inversores Elevadores y solamente los interruptores de la etapa elevadora soportan un esfuerzo similar al de los inversores Elevadores.
Sin embargo, esta desventaja de los inversores Elevadores, respecto a una solución en dos etapas, tiende a desaparecer conforme se incrementa la tensión de entrada, es decir cuando el inversor tiene que elevar menos. En otras palabras, los esfuerzos en comente en los inversores Reductor-Elevador y Elevador, se reducen considerablemente si se aumenta la tensión de entrada, tal como se aprecia en la figura 4.3.
I * , ,
I I I , I I , . .
O0 l o 20 30 40 50 M, 70 so 90 IW vi VI
Figura 4.3 Esfuerzos en comente para los inversores Elevadores.

Conclusiones Capitulo 4
4.4 EL CONTROLADOR POR MODOS DESLIZANTES
Como se mencionó anteriormente, los tres inversores comparados en este trabajo tienen implementada una estrategia de control por modos deslizantes. En la figura 4.4 se muestra el circuito esquemático del controlador por modos deslizantes, de propósito general, utilizado en los tres inversores.
Convertidor A
t cr Limitador de
Frecuenci
Figura 4.4 Controlador por modos deslizantes de propósito general utilizado.
En la figura 4.4 se puede observar que la superficie deslizante utilizada es lineal y esta dada por la suma de los errores en las variables de estado, multiplicados respectivamente por los parámetros del controlador. Es importante señalar que la forma en que se obtiene el error entre la comente del inductor y su referencia es indirecta y como se puede apreciar en la figura 4.4 se.logra mediante un filtro pasa altas, el cual es idéntico en los tres controladores. Por otro lado el circuito utilizado para limitar la frecuencia también es idéntico en los tres casos y utiliza la técnica de tiempo de encendido constante descrita en la sección 2.5.1.
En resumen, la estandarización realizada en los controladores consiste en utilizar superficies deslizantes, estructuras para la ley de control, circuitos para limitar la frecuencia, filtros pasa altas y parámetros en el controlador idénticos en los tres casos. Una conclusión importante sobre el controlador por modos deslizantes, de acuerdo con las simulaciones y los resultados experimentales obtenidos, es que proporciona una rápida respuesta dinámica en los tres inversores (Reductor-Elevador, Elevador y Reductor).
4.5 LOGROS
El presente trabajo de investigación contribuyó a la elaboración del siguiente artículo:
N. Vázquez, J. Almazán, J. Alvarez, C. Apilar, J. Arau “Analysis and Experimental Study of the Buck, Boost and Buck-Boost Inverters”, IEEE Power Electronics Specialists Conference, PESC’99, Charleston, Carolina del Sur, USA.
85

Capitulo 4 Conclusiones
El cual fue presentado en uno de los congresos más importantes a nivel mundial en electrónica de potencia, el Power Electronics Specialists Conference (PESC por sus siglas en inglés) organizado por el Institute of Electric and Electronics Engineers (IEEE por sus siglas en inglés).
4.6 TRABAJOS FUTUROS
En cuanto a los posibles trabajos futuros, dentro de la misma línea de investigación, podrían considerarse los siguientes:
Implementar y probar otras estrategias de control en los inversores para compararlas y determinar cual de ellas posee la implementación más sencilla y/o cual proporciona los mejores resultados en cuanto a respuesta dinámica. Una estrategia de control que posee Características muy interesantes y por lo tanto motiva a realizar esta comparación es el control basado en pasividad.
Una alternativa interesante podría ser implementar conmutación suave en los inversores Reductor-Elevador y Elevador para reducir las pérdidas por conmutación y de esta manera aumentar la eficiencia. Otra razón para proponer como trabajo futuro el implementar conmutación suave en los inversores Reductor-Elevador y Elevador es la operación en frecuencia variable de estos inversores cuando se utiliza un control por modos deslizantes, característica que podría facilitar dicha implementación. Por otro lado, al conseguirse la conmutación suave podría aumentarse la frecuencia de conmutación para lograr disminuir el tamaño y hacer más rápida la respuesta dinámica de los inversores sin que esto signifique un aumento en las pérdidas por conmutación y una disminución en la eficiencia.
Finalmente, un trabajo de investigación innovador e interesante podría ser analizar, implementar y probar la versión trifásica de los inversores Reductor-Elevador y Elevador.
86

! I 1
i I
I
t
#
i I
APÉNDICE A
DISEÑO MAGNÉTICO
Básicamente existen dos tipos de inductores y están clasificados de acuerdo con las Características de la comente que circula a través de ellos en:
Inductores con comentes sin componente de CD. Inductores con comentes con componente de CD.
Todos los inductores utilizados en el presente trabajo de investigación manejan comentes con componentes de CD, razón por la cual únicamente se describirá brevemente el procedimiento de diseño magnético para este tipo de inductores. Un procedimiento mas detallado se puede encontrar en [26], aquí únicamente se presentan los pasos más importantes del diseño.
Una vez que se ha calculado el valor de inductancia requerido, mediante la ley de inducción de Faraday:
At Ai
L=-v L
donde: L = Valor de Inductancia. Ai = Rizo de comente deseado. V, = Tensión en las terminales del inductor. At = Tiempo durante el cual se aplica la tensión V,.

El primer paso del diseño magnético consiste en calcular el producto de áreas (AP) requerido para manejar la suficiente cantidad de energía y conseguir la inductancia deseada (L) , mediante la siguiente ecuación:
donde: AP = Producto de áreas del núcleo. Zp = Corriente pico en el inductor.
Z,, = Corriente efectiva en el inductor. Z, = Densidad de comente en un conductor.
K, = Factor de utilización del núcleo. B = Densidad de flujo a la que se desea operar el núcleo
El segundo paso de diseño es determinar el número de vueltas mínimo (N,J que deberán utilizarse para conseguir el valor de inductancia deseado (L) sin exceder la densidad de flujo máxima (Bmm) con la siguiente expresión:
L.I*,,, . lo4 N . = min
Bmm . Ae
donde: N,, = Número de vueltas mínimo. B,, = Densidad de flujo máxima permitida.
A , = Area efectiva del núcleo.
('4.3)
Finalmente, el tercer paso de diseño es estimar el entre hierro (lz) del núcleo con la siguiente fórmula:
2 1 . A, .lo- L
/io . /ir . N I = g
donde: lg = Entrehierro total. , ~ ~ = 4 . 1 r . i O - ~ 1 = 1 (para el aire). N = Número de vueltas.
Por último, se debe seleccionar el calibre del conductor adecuado para soportar la comente efectiva en el inductor en función de la densidad de comente (Z,) que se desea manejar. Para tal propósito existen una infinidad de tablas [26,27], que facilitan la selección del calibre.

APÉNDICE B
BIBLIOGRAF~A
[ I ] Tarter, E., “Principles of Solid-state Power Conversion”, Howard W. Sams & Co., Inc. 1985.
[2] www. gosolar.com
[3] Redl, R., Kislovski, A. S., “ Telecom Power Supplies And Power Quality”, Proceedings OfINTELEC ’95, pp 13-21.
[4] Batistela, N., Penn, A., “A Fixed Frequency Sliding Mode Control for Voltage Source Inverter”, Power Electronic Brazilian Conference, COBEP, December 1995.
[5] Hicks, G.P., “A Review of AC U P S Technology (Final Report)”, Electrical Engineering Center, July 1992.
[6] Enjeti, P. N., Ziogas, P.D., Lindsay, J. F., “Programmed PWM Techniques to Eliminate Harmonics: A Critical Evaluation”, IEEE Transaction on Industry Applications, Vol. 26, No. 2, March-April, 1990, pp 302-316.

[7] Boost, M. A,, Ziogas, P. D., “State - of - the - Art Carrier PWM Techniques: A Critical Evaluation” ”, IEEE Transaction on Industry Applications, Vol. 24, No. 2, March-April, 1988, pp 271-280.
[8] Bancal, S. C., Rao, M. E. and U. M. “Evaluation of PWM Inverter Schemes”, Proc. IEEE, Vol. 125, NO. 4, April 1978, pp 328-334.
[9] Utkin, V. I.,“ Variable Stnicture Systems with Sliding Modes”, IEEE Transactions on Automatic Control, Vol. AC-22, No. 2, pp. 212-22, 1977.
[lo] De Carlo, R., Zak, S., Matthews, G., “Variable Structure Control of Nonlinear Multivariable Systems: A Tutorial”, Proceedings of the IEEE, Vol. 76, No. 3, March 1998.
[ i l l Hung, J. Y., Gao, W., Hung, J. C., ‘‘ Variable Structure Control: A Survey”, IEEE Transactions on Industrial Electronics, Vol. 40, No. 1, February 1993.
[12] Gao, W., Hung, J. C., “ Variable Structure Control of Nonlinear Systems: A New Approach”, IEEE Transactions on Industrial Electronics, Vol. 40, No. 1, February 1993.
[13] Young, K., Utkin, V., Ozgüner, U., “ A Control Engineer’s Guide to Sliding Mode Control”, IEEE Transactions on Control Systems Technology, Vol. 7, No. 3, May 1999.
[14] Cardoso, B., Moreira, A., Menezes, B., Cortizo, P., “ Analysis of Switching Frequency Reduction Methods Applied to Sliding Mode Controlled DC-DC Converters”, IEEE Applied Power Electronics Conference and Exposition, APEC 1992.
[ 151 Mattavelli, P., Rossetto, L., Spiazzi, G., Tenti, P., “General-Purpose Sliding-Mode Controller for DC/DC Converter Applications”, IEEE Power Electronics Specialists Conference, PESC 1993.
[ 161 Sira-Ramírez, H., “Sliding Motions in Bilinear Switched Networks”, IEEE Transactions on Circuits and Systems, Vol. CAS-34, No. 8, August 1987.
[ 171 Sira-Ramírez, H., Ilic, M., “A Geometric Approach to the Feedback Control of Switch Mode DC-to-DC Power Supplies”, IEEE Transactions on Circuits and Systems, Vol. 35, No. 10, October 1988.
[18] Pastorello, W., Batisela, N., Penn, A., “Controle por Modo Deslizante Aplicado a Conversores Estáticos de Potencia”, Seminario de Eletronica de Potencia, SEP 1995, Santa Catarina, Brasil.
90

[19] Caceres, R., Barbi, I., “Estudo de uma Familia de Conversores CC-CA, Derivados dos Conversores CC-CC Fundamentais”, Projeto de Tese de Doutorado, Universidad Federal de Santa Catarina, Flonanópolis, Brasil, 1995.
[20] Caceres, R., Barbi, I., “A Boost DC-AC Converter: Design, Simulation and Implementation”, Power Electronic Brazilian Conference, COBEP, December 1995.
[21] Cáceres, R., Barbi, I., “A Boost DC-AC Converter: Analysis, Design, and Experimentation”, IEEE Transactions on Power Electronics, Vol. 14, No. 1, January 1999.
[22] Vázquez, N., “Nueva Estructura de Inversor Basado en el Convertidor CDKD Tipo Elevador”, Tesis de Maestna, Centro Nacional de Investigación y Desarrollo Tecnológico, CENIDET, Cuemavaca, Morelos, México, 1997.
[23] Mohan, N., Undeland, T. M., Robbins, W. P., “ Power Electronics: Converters, Applications and Design”, John Wiley & Sons, 1989.
[24] Sira-Ramírez, H., “Differential Geometric Methods in Variable Structure Control”, International Journal Control, Vol. 48, No. 4, pp. 1359-1390, 1988.
[25] Sira-Ramírez, H., “A Geometric Approach to Pulse-Width Modulated Control in Nonlinear Dynamical Systems”, IEEE Transactions on Automatic Control, Vol. 34, No. 2, pp. 184-187, 1989.
[26] Billings, K. H., “Switchmode Power Supply Handbook”, Ed. McGraw-Hill, 1989.
[27] McLyman, C., “Transformer and Inductor Design Handbook”, Marcel Dekker, Inc., 1988.

APÉNDICE C
LISTA DE SÍMBOLOS
Producto de áreas Comente directa Comente alterna Ciclo de trabajo Ciclo de trabajo máximo Error en la variable de estado x, Error en la variable de estado x2 Factor de cresta Frecuencia de conmutación Frecuencia de la tensión de salida Ganancia máxima Comente en el capacitor Comente en el inductor Comente máxima en el inductor Comente de salida Valor pico de la comente de salida Valor eficaz de la comente de salida Factor de holgura Acción de control proporcional e integral Potencia de salida

Modulación por anchura de pulso Interruptor de estado sólido Potencia aparente Sistema de alimentación ininterrumpible Sistema fotovoltaico Función matemática signo Control por modos deslizantes Parámetros del controlador por modos deslizantes Periodo de conmutación Distorsión armónica total Tiempo de encendido del interruptor Q Ley de control Control equivalente Ley de control real Tensión de salida en el convertidor A Tensión de salida mínima en el convertidor A Tensión de salida en el convertidor B Voltaje en el capacitor Voltaje de alterna Voltaje de directa Voltaje de holgura Tensión de entrada Voltaje en el inductor Tensión de salida Valor pico de la tensión de salida Voltaje máximo en el interruptor Q Valor eficaz de la tensión de salida Variables de estado para ZL y V, respectivamente Primer derivada de las variables de estado x I y x, Rizo de comente en el inductor Incremento de tiempo Rizo de voltaje en el capacitor Superficie deslizante
Primer derivada de la superficie deslizante Eficiencia Impedancia de la carga
SEP CENfDET DGIT CENTRQ DE INFORMACP6)N
94