joão n. delgado ; dídia i. c. covas ; and antónio b. de...
TRANSCRIPT

1
Hydraulic Transients in Pump-Rising Main Systems with Quasi-constant Back Pressure
João N. Delgado1; Dídia I. C. Covas
2; and António B. de Almeida
3
ABSTRACT
The current paper aims to discuss the influence of the back pressure effect in hydraulic
transients in pumping systems caused by the sudden pump stoppage due to power failure. A
one-dimensional hydraulic transient solver was developed based on the classic water hammer
theory and solved using the Method of Characteristics. The solver incorporates the pump-
element described by Sutter parameters, the check-valve in the discharge line simulated by
the orifice law as a function of the valve opening, the pressurized surge tank described by the
polytropic process and a formulation to describe the unsteady-state friction losses. The model
was tested using transient pressure data collected from one laboratory hydraulic circuit.
Transients were generated by the sudden stoppage of the pump due to failure of the power
grid with and with the consideration of a quasi-constant backpressure. Collected data were
compared with the results of the numerical modelling and used to calibrate model parameters,
and a good agreement was obtained. The tests with the quasi-constant backpressure led to
extremely high pressure surges.
INTRODUCTION
The control of hydraulic transients in pressurized pipes is a major concern for
engineers and pipe system managers, for reasons related to risk, safety and efficient
operation. This phenomenon is caused by disturbances in flow regulation devices, such as
valves or pumps. One example of a severe disturbance in pump-raising mains is the sudden
stoppage of the pumps due to the failure of the power grid, which can lead to sub-
1 Research Fellow, Dept. of Civil Engineering, Instituto Superior Técnico, Universdade de Lisboa, Ave. Rovisco Pais, 1049-001
Lisbon, Portugal. E-mail: [email protected] 2 Associate Professor, Dept. of Civil Engineering, Instituto Superior Técnico, Universidade de Lisboa, Ave. Rovisco Pais, 1049-001
Lisbon, Portugal. E-mail: [email protected] 3 Emeritus Professor, Dept. of Civil Engineering, Instituto Superior Técnico, Universidade de Lisboa, Ave. Rovisco Pais, 1049-001
Lisbon, Portugal. E-mail: [email protected]

2
atmospheric pressures or extreme overpressures. As the first one can lead to the occurrence of
cavitation or liquid column separation (Bergant et al., 2006), the latter can jeopardize the
safety of the pipe systems if the maximum pressure overcome the maximum pressure the
pipeline can withstand. One phenomenon that may induce extreme overpressures is the check
valve slam, which can be defined by the occurrence of extreme overpressures caused by the
delayed closure of the check valve when the flow reverses through this device (Thorley,
1991). According to Provoost (1983) and Thorley (1983), the higher the fluid deceleration,
the higher the pressure variation induced for the same check valve. The fluid deceleration is
related with the head difference between upstream and downstream the check valve: the
higher the head difference, the higher the fluid deceleration. Accordingly, pipe systems that
are more susceptible to check valve slam are those in which a back pressure continues to exist
after the sudden pump stoppage, such as in parallel pumping groups where only one pump
sudden stops.
The current paper aims at the experimental and numerical analysis of the pipe flow
behavior during transient events in pump-raising mains with and without the influence of the
back pressure conditions. The paper includes a brief description of the developed hydraulic
transient solver, the description of the experimental facility, the set of experimental tests
carried out and the data collected, as well as the comparison of experimental tests and the
mathematical model results. Finally, the main conclusions are drawn.
HYDRAULIC TRANSIENT SOLVER
Basic equations and numerical schemes
A mathematical model for the calculation of hydraulic transients in pressurized pipes
has been developed based on the classical theory of waterhammer. Equations that describe
the behavior of fluid in the pipe during transient events are based on the continuity and the
momentum conservation principles [Eqs. (1) and (2), respectively] independently of initial

3
and boundary conditions (Almeida and Koelle, 1992). These equations are (Chaudhry, 1987;
Wylie and Streeter 1993):
2
0dH a Q
dt gS x
Q (1)
1
0f
H dQh
x gS dt
(2)
where H = piezometric head; a = elastic wave speed; g = gravity acceleration; S = area of
the pipe cross-section; Q = flow rate; fh = friction losses per unit length; t = time
coordinate; and x = spatial coordinate along the pipe axis.
With regard to the headlosses in unsteady-state flow, there are several formulations
used to describe the unsteady-state component (Brunone et al., 1991; Ramos et al, 2004;
Vardy and Brown, 2007). The formulation used in this paper - Eq. (3) - considers unsteady
friction described by the summation of the local and convective accelerations (Vítkovský et
al., 2000).
3
uf
Qk Q Qh a
gS t Q x
(3)
The Method of Characteristics (Wylie and Streeter, 1993) allows the transformation of
partial differential Eqs. (1) and (2) into two ordinary differential equations, which can be
solved by means of finite-difference schemes. A first and second order numerical scheme was
considered for the steady-state friction resistance term. Regarding the unsteady-state friction
component, an implicit and explicit first order numerical scheme was used in the local and
convective acceleration terms, respectively. The compatibility equations form is presented
below:
K P P KQ C Ca H (4)
K N N KQ C Ca H (5)

4
where PC , PCa ,
NC and NCa = constants that depend on the numerical scheme used and
defined for each pipe section and time. The numerical description of each coefficient used in
Eqs. (4) and (5) is presented in Table 1.
Eqs. (4) and (5) describe the transient flow along two straight independent lines that
propagate flow and piezometric head information in the space-time domain.
Table 1. Compatibility equations parameters
Parameter Coefficients
Compatibility equations
terms
1 1
2 21
A A P PP
P P
Q CaH C CC
C C
1 1
2 21
B B N NN
N N
Q CaH C CC
C C
2 21P
P P
CaCa
C C
2 21N
N N
CaCa
C C
Steady-
state
friction
Frictionless 1 2 0P PC C 1 2 0N NC C
First-order
accuracy
1
2 0
P A A A
P
C R tQ Q
C
1
2 0
N B B B
N
C R tQ Q
C
Second-order
accuracy
1
2
0P
P A A A
C
C R tQ Q
1
2
0N
N B B B
C
C R tQ Q
Unsteady-state friction -
Vítkovský et al., (2000)
formulation
1 3 ' 3 ' 3 '1A
P K A A K A
A
QC k Q k Q Q k Q Q
Q
1 3 ' 3 ' 3 '1B
N K B B K B
B
QC k Q k Q Q k Q Q
Q
2 2 3P NC C k
Note: = relaxation coefficient for the flow-time derivative calculation
The superscripts ′ and ″ refer to the steady-state friction and the unsteady-state friction
components, respectively.
Boundary conditions
Sudden pump stoppage due to power failure
The numerical description of the pump during the transient event was performed using
the Suter Parameters (Marchal et al., 1965). The model used to describe the upstream

5
boundary condition considers a reservoir with constant head and a pump with a suction line
with negligible headlosses (Chaudhry, 1987; Wylie and Streeter, 1993). Immediately
downstream the pump, there is a check valve, which was described by three different models:
(i) Model 1: quasi-instantaneous closure when the flow reverses through the valve; (ii)Model
2: quasi-instantaneous closure at a given time; (iii) Model 3: calibrated check valve maneuver
based on the collected experimental data to take into account the inertial effects of
accelerating and decelerating flow through the check valve. These models will influence the
local headloss produced by the check valve, ValveH , during the transient event.
Eqs. (6) is used to describe the head balance between the reservoir and the check
valve (Figure 1). Eq. (7) describes the decelerating torque, which is given by the differential
rotating masses equation. The negative characteristic equation [Eq. (5)] is considered in the
mathematical representation of the pump since this element is located in the upstream
boundary.
Figure 1. Pump scheme used for the numerical model
UK res Pump V K KH H H C Q Q (6)
2 2
60
dNT WR
dt
(7)
6
where UresH = upstream reservoir level; PumpH = pump total developed head at the end of each
time-step; VC = local headloss coefficient in the valve; and 2WR = combined polar moment
of inertia of the pump, motor, shaft and liquid inside the pump impeller.
Valve discharging to atmosphere
The valve discharging to the atmosphere was described by:
22
KK V V K K
V
QH Z C Q Q
gS
(8)
where VZ = valve elevation above the datum; and VS = area of the valve cross-section.
The positive characteristic equation [Eq. (4)] is considered in the mathematical
representation of the valve since this element is located in the downstream boundary.
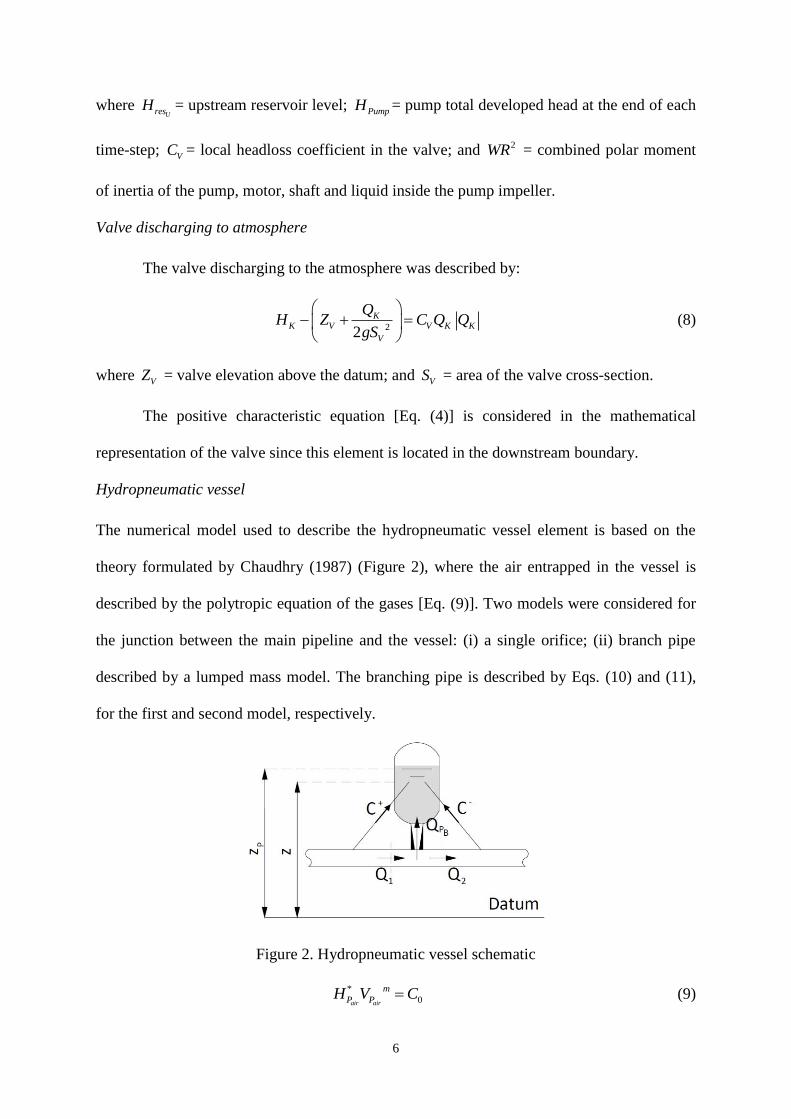
Hydropneumatic vessel
The numerical model used to describe the hydropneumatic vessel element is based on the
theory formulated by Chaudhry (1987) (Figure 2), where the air entrapped in the vessel is
described by the polytropic equation of the gases [Eq. (9)]. Two models were considered for
the junction between the main pipeline and the vessel: (i) a single orifice; (ii) branch pipe
described by a lumped mass model. The branching pipe is described by Eqs. (10) and (11),
for the first and second model, respectively.
Figure 2. Hydropneumatic vessel schematic
*
0air air
m
P PH V C (9)

7
*
air BP BPK P b P BP P PH H H Z C Q Q (10)
*
BP 22BP air
s BPBPP K P P b BP BP BP
BP BP BP
f Lg tSQ Q H H Z H C Q Q
L gD S
(11)
where *
airPH = absolute pressure head; airPV = volume of air inside the HPV at the end of the
time-step; m = exponent of the polytropic gas equation; and 0C = constant of the polytropic
gas equation given by the initial conditions *
0 0 0air air
mC H V ; bH = barometric pressure head;
PZ = water level in the HPV at the end of the time-step; BPC = local headloss coefficient of
the branch pipe; BPPQ and BPQ = flow rate through the branch pipe at the end and beginning
of the time-step, respectively; BPS = area of the branch pipe cross section; BPL = length of the
branch pipe; and BPD = inner diameter of the branch pipe.
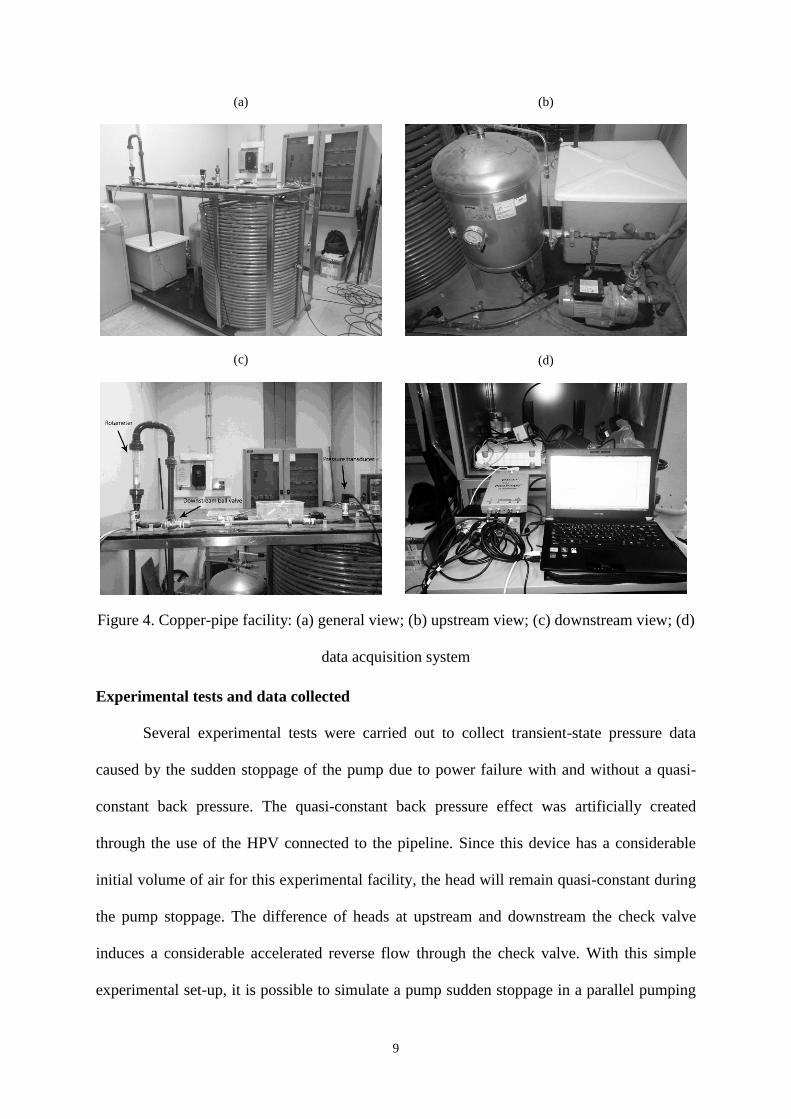
EXPERIMENTAL FACILITY AND DATA COLLECTED
Facility description
An experimental pipe rig was assembled in the Laboratory of Hydraulics and Water
Resources, in the Department of Civil Engineering, Architecture and Georessources, at
Instituto Superior Técnico (Figure 4a). The system is composed of a coiled copper pipe with
approximately 103.2 m of length, 20 mm of inner diameter and 1 mm of pipe-wall thickness.
Figure 3 presents a simplified schematic of the experimental facility.
Figure 3. Schematic of the experimental facility – adapted from Delgado (2013)

8
The system is supplied from a storage tank with 125 l of capacity by a pump with a
nominal flow rate of 1.0 m3/h, a nominal head of 32.0 m and a total power of 1.75 kW
(Figure 4b). Immediately at downstream of the pump, there is a needle check valve used to
prevent the reverse flow through the pump. At downstream the check valve, there is a
hydropneumatic vessel with 60 l of capacity (Figure 4b). This device can be connected or
disconnected from the main pipeline by the opening or close of a ball valve. At the
downstream end of the pipe, there is a ball valve with DN 3/4’’ that allow the control of the
steady-state flow rate (Figure 4c) ad the fluid is discharged in to the atmosphere at
approximately 1.51 m of elevation.
Steady-state flows are measured by a rotameter (Figure 4c) and transient-state
pressures are measured by three strain-gauge type pressure transducers (WIKA) with an
absolute pressure range from 0 to 25 bar and accuracy of 0.5% of full range. The transient-
state pressures are collected using a data acquisition system (Picoscope) with four channels
(Figure 4d). Transducers are located in different sections of the pipe: section T1 – at the
upstream end; section T2 – at a middle section; and section T3 – at the downstream end (see
Figure 3).
9
(a)
(b)
(c)
(d)
Figure 4. Copper-pipe facility: (a) general view; (b) upstream view; (c) downstream view; (d)
data acquisition system
Experimental tests and data collected
Several experimental tests were carried out to collect transient-state pressure data
caused by the sudden stoppage of the pump due to power failure with and without a quasi-
constant back pressure. The quasi-constant back pressure effect was artificially created
through the use of the HPV connected to the pipeline. Since this device has a considerable
initial volume of air for this experimental facility, the head will remain quasi-constant during
the pump stoppage. The difference of heads at upstream and downstream the check valve
induces a considerable accelerated reverse flow through the check valve. With this simple
experimental set-up, it is possible to simulate a pump sudden stoppage in a parallel pumping

10
system where only one pump trips out of two or more, where the back pressure is maintained
quasi-constant by the operating pumps.
Figure 5 presents the collected data at transducer T1, with and without the back
pressure, for initial flow rates, Q0 between 100 and 600 l/h. Figure 6 presents the
measurements at the three transducers for the transient event with Q0 = 600 l/h with and
without the backpressure.
(a)
(b)
Figure 5. Data collected at T1 for sudden pump stoppage for Q0 = 100 to 600 l/h: (a) without
back pressure; (b) with back pressure quasi-constant
(a)
(b)
Figure 6. Data collected at T1, T2 and T3 for sudden pump stoppage and Q0 = 600 l/h:
(a) without back pressure; (b) with back pressure quasi-constant
Figure 5 shows that there is a significant difference between the characteristics of the
pressure variations during the transient event, when the back pressure is affecting the flow or

11
not. When there are no back pressure, and since the geometric head between the pump and
the discharge to atmosphere is low, the fluid decelerates gradually, producing a negligible
upsurge when the check valve closes (almost not visible), and the head in the pipe system
tends to the head of the discharge to atmosphere. The oscillations observed for initial flow
rates of 100 and 200 l/h are probably due to the fact of the pump being operating far from the
rated conditions. When the back pressure is imposed on the hydraulic system, the maximum
pressures observed are extremely high. As the pump stops, the HPV holds the piezometric
head, and it starts supplying the pipeline for downstream as well as for upstream, between the
vessel and the pump; because the check valve does not instantaneously close, allowing some
reverse flow, when it actually closes, the reverse flow is quite high, inducing an extremely
high upsurge (Delgado et al., 2013). Despite not visible in Figure 5b and Figure 6b due to the
temporal scale used, the piezometric head in the experimental facility tends to the level of
discharge to atmosphere with the increase of time (due to the emptying of the HPV). This
clearly demonstrates that the back pressure have a considerable influence in the pressure
conditions during a transient event caused by the sudden stoppage of a pump.
MODEL CALIBRATION AND VALIDATION
Sudden pump stoppage without the air vessel connected
Pump-motor characteristics:
The centrifugal pump has the following rated conditions: RQ = 1.0 m3/h, pumping
head RH = 32.0 m, total power RP = 1.75 kW and rotational speed RN = 2900 rpm. The
pump-motor inertia was estimated by Thorley and Faithfull (1992) formulation, in which I =
1I + 2I , where 1I = estimated inertia of the pump impeller and fluid; and 2I = inertia of the
motor, given by
0.096
1 30.038
/1,000
R
R
PI
N
(12)

12
1.48
2 0.0043/1,000
R
R
PI
N
(13)
The pump-motor inertia was estimated in I = 0.0025 kg.m2.
Wave Speed Estimation:
The theoretical value of the wave speed was estimated in 1290 m/s by the classic
formula (Almeida and Koelle, 1992) for a copper-pipe (Young's modulus E = 177 GPa) with
20 mm of inner diameter, 1 mm of wall thickness and unconstrained throughout its length. It
was also estimated by the traveling time of the pressure wave between the downstream and
the upstream transducer, being the obtained value 1150 m/s. This value is much lower than
the theoretical value because there is gas in the liquid in a free form and cumulated in air
pockets along the pipeline. The experimental value of the wave speed (1150 m/s) is used in
all simulations.
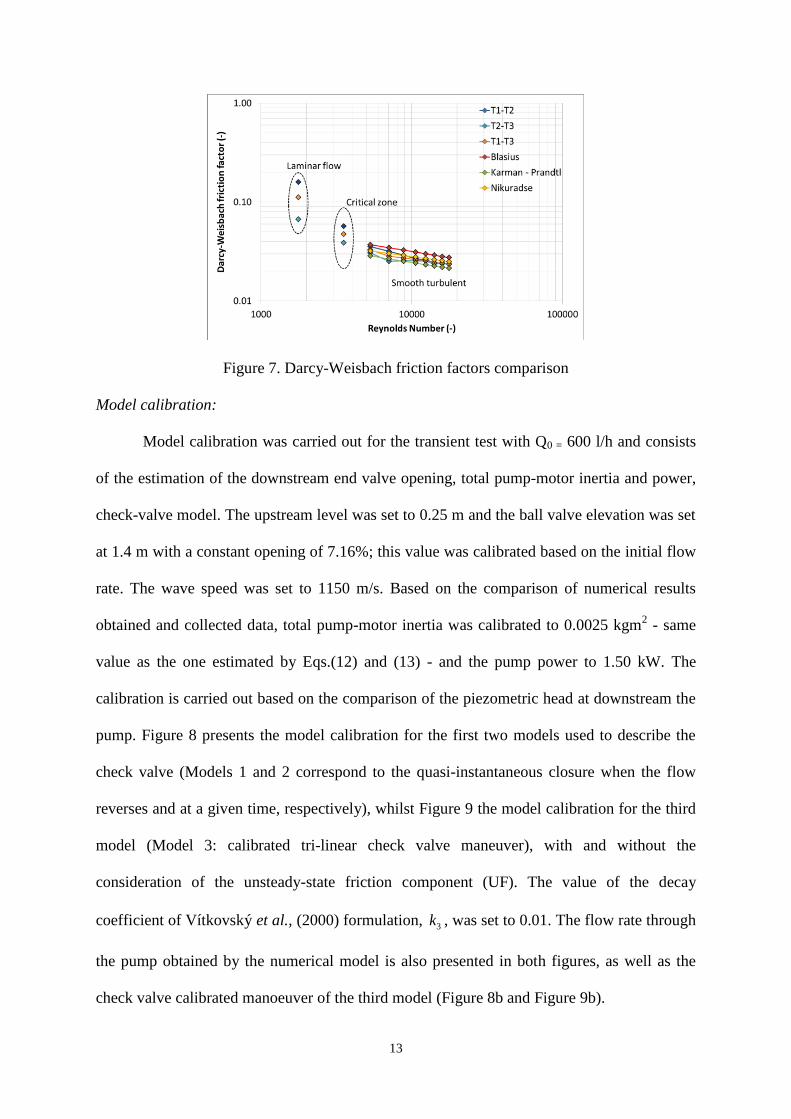
Steady-state friction resistance:
The Darcy-Weisbach friction factor was estimated based on the headlosses observed
between the three transducers and was compared with the values obtained by several friction
resistance formulas (Figure 7) presented in Eqs. (14) to (16), since the pipe-wall is smooth
(White, 1999; Lencastre, 1996). Nikuradse formulation [Eq. (15)] had a better fitting and
consequently was used to describe the steady-state friction losses in the numerical model.
Blasius Expression 0.25
0.3164
Resf (14)
Nikuradse Expression 0.237
0.2210.0032
Resf (15)
Karman-Prandtl Expression 10
1 2.512log
Res sf f
(16)
13
Figure 7. Darcy-Weisbach friction factors comparison
Model calibration:
Model calibration was carried out for the transient test with Q0 = 600 l/h and consists
of the estimation of the downstream end valve opening, total pump-motor inertia and power,
check-valve model. The upstream level was set to 0.25 m and the ball valve elevation was set
at 1.4 m with a constant opening of 7.16%; this value was calibrated based on the initial flow
rate. The wave speed was set to 1150 m/s. Based on the comparison of numerical results
obtained and collected data, total pump-motor inertia was calibrated to 0.0025 kgm2 - same
value as the one estimated by Eqs.(12) and (13) - and the pump power to 1.50 kW. The
calibration is carried out based on the comparison of the piezometric head at downstream the
pump. Figure 8 presents the model calibration for the first two models used to describe the
check valve (Models 1 and 2 correspond to the quasi-instantaneous closure when the flow
reverses and at a given time, respectively), whilst Figure 9 the model calibration for the third
model (Model 3: calibrated tri-linear check valve maneuver), with and without the
consideration of the unsteady-state friction component (UF). The value of the decay
coefficient of Vítkovský et al., (2000) formulation, 3k , was set to 0.01. The flow rate through
the pump obtained by the numerical model is also presented in both figures, as well as the
check valve calibrated manoeuver of the third model (Figure 8b and Figure 9b).

14
(a)
(b)
Figure 8. Model calibration for sudden pump stoppage without air vessel Q0 = 600 l/h –
Check valve models 1 and 2: (a) piezometric head at downstream the pump; (b) flow rate
downstream the pump
(a)
(b)
Figure 9. Model calibration for sudden pump stoppage without air vessel Q0= 600 l/h –
Check valve model 3 with and without UF: (a) piezometric head at downstream the pump; (b)
flow rate downstream the pump
Check valve Models 1 and 2 accurately describe the initial pressure drop after the
pump sudden stoppage (Figure 8a). However, the small pressure rise after the check valve
closure is not well simulated: the pressure rise occurs earlier than observed for Model 1, and
the estimated overpressures are higher than observed for Model 2. This is due to the fast
closure of the check valve, with significant reverse velocity (Figure 8b).

15
Results obtained by Model 3 used to describe the check valve maneuver fit better the
collected data. This is related with the inertial effects of accelerating and decelerating flow
through the check valve. Further experimental analyses should be carried out to identify the
relation between the accelerating and decelerating flow and the valve closure, however this is
out of the scope of the current research.
Figure 9b shows that the unsteady-state friction component has a negligible effect in
the surge damping. This is due to the fact of the transient event being slow (i.e., the flow rate
in the pump reduces to zero before the pressure wave reaches the pump element - tm > 2L/c =
0.18 s).
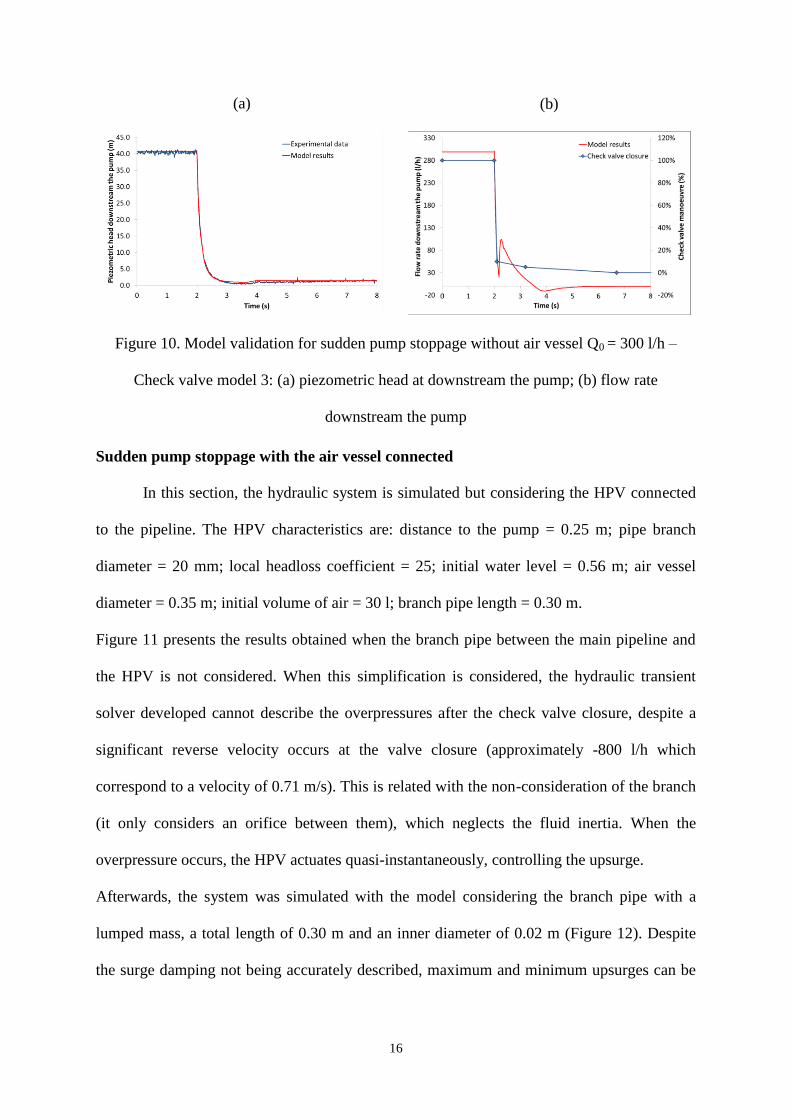
Model validation:
Previous values were used for model testing with different initial conditions, Q0 = 300
l/h. The power was set in 2.00 kW and the downstream end valve opening in 4.92% for this
initial condition. A good fitting is obtained (Figure 10a), as long as the check valve maneuver
is calibrated for this specific case (Figure 10b). Calibrated check valve maneuver is slightly
different from the one obtained for the Q0 = 600 l/h (Figure 9b), as the dynamic behavior of
the check-valve is different, due to change of the flow deceleration conditions. The unsteady-
state friction component was not considered in the model validation due to the negligible
influence on the surge damping description.
16
(a)
(b)
Figure 10. Model validation for sudden pump stoppage without air vessel Q0 = 300 l/h –
Check valve model 3: (a) piezometric head at downstream the pump; (b) flow rate
downstream the pump
Sudden pump stoppage with the air vessel connected
In this section, the hydraulic system is simulated but considering the HPV connected
to the pipeline. The HPV characteristics are: distance to the pump = 0.25 m; pipe branch
diameter = 20 mm; local headloss coefficient = 25; initial water level = 0.56 m; air vessel
diameter = 0.35 m; initial volume of air = 30 l; branch pipe length = 0.30 m.
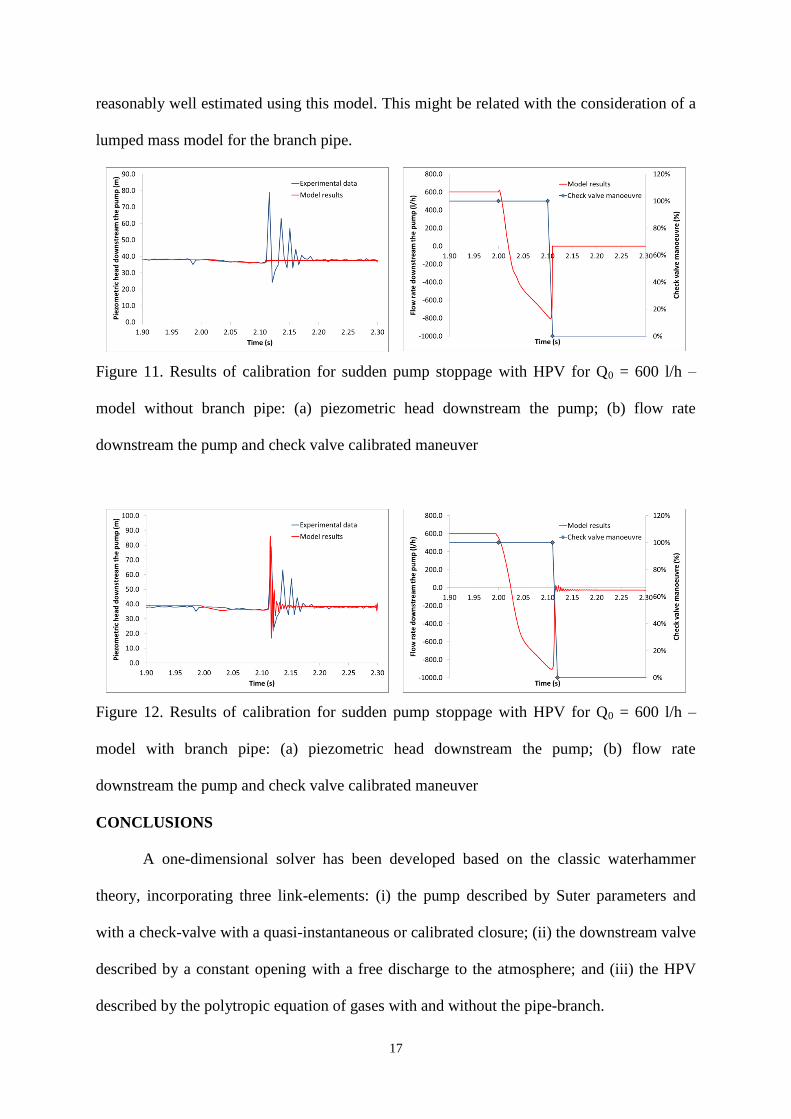
Figure 11 presents the results obtained when the branch pipe between the main pipeline and
the HPV is not considered. When this simplification is considered, the hydraulic transient
solver developed cannot describe the overpressures after the check valve closure, despite a
significant reverse velocity occurs at the valve closure (approximately -800 l/h which
correspond to a velocity of 0.71 m/s). This is related with the non-consideration of the branch
(it only considers an orifice between them), which neglects the fluid inertia. When the
overpressure occurs, the HPV actuates quasi-instantaneously, controlling the upsurge.
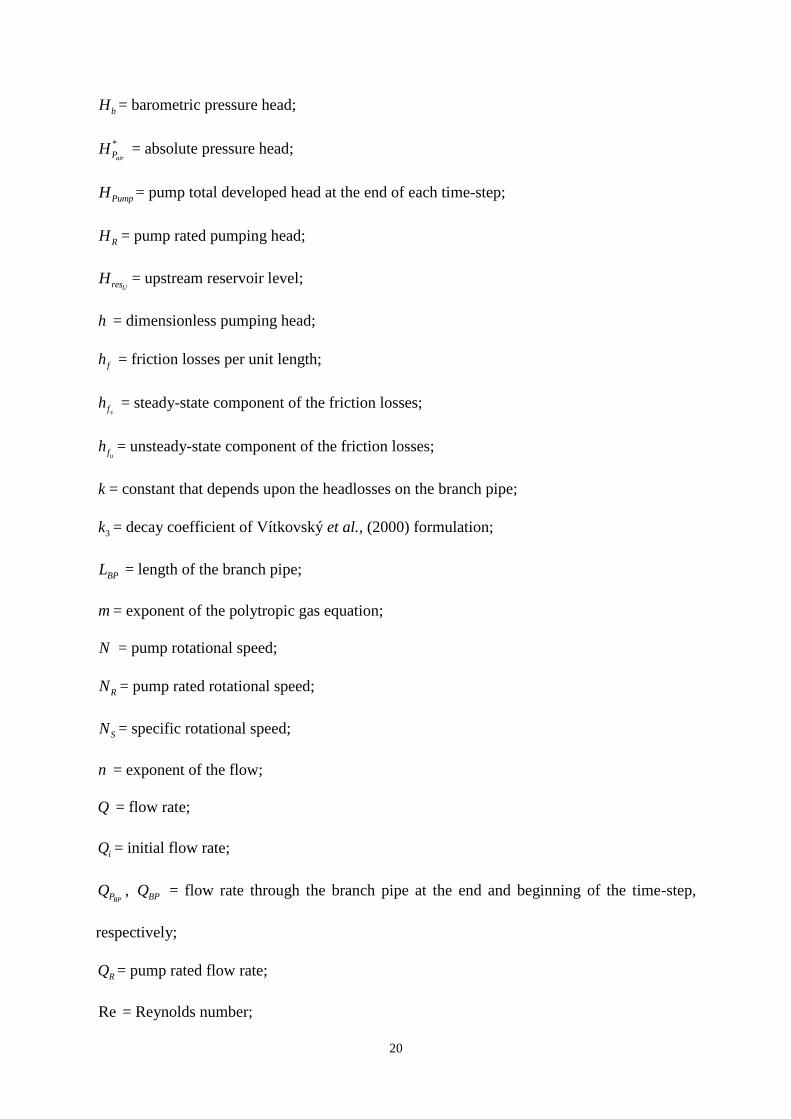
Afterwards, the system was simulated with the model considering the branch pipe with a
lumped mass, a total length of 0.30 m and an inner diameter of 0.02 m (Figure 12). Despite
the surge damping not being accurately described, maximum and minimum upsurges can be
17
reasonably well estimated using this model. This might be related with the consideration of a
lumped mass model for the branch pipe.
Figure 11. Results of calibration for sudden pump stoppage with HPV for Q0 = 600 l/h –
model without branch pipe: (a) piezometric head downstream the pump; (b) flow rate
downstream the pump and check valve calibrated maneuver
Figure 12. Results of calibration for sudden pump stoppage with HPV for Q0 = 600 l/h –
model with branch pipe: (a) piezometric head downstream the pump; (b) flow rate
downstream the pump and check valve calibrated maneuver
CONCLUSIONS
A one-dimensional solver has been developed based on the classic waterhammer
theory, incorporating three link-elements: (i) the pump described by Suter parameters and
with a check-valve with a quasi-instantaneous or calibrated closure; (ii) the downstream valve
described by a constant opening with a free discharge to the atmosphere; and (iii) the HPV
described by the polytropic equation of gases with and without the pipe-branch.

18
Transient tests induced by the sudden pump stoppage with and without the quasi-
constant back pressure have been carried out in an experimental facility assembled at IST
made of copper with 20 mm of inner diameter and 100 m of total length. Collected data have
shown that the pressure surges can be higher when the back pressure remains constant than
when it is not. After the failure of the power grid and consequent stoppage of the pump, the
back pressure induces a higher deceleration of the flow, inducing higher reverse velocities
through the check valve when it actually closes. The higher the velocities generated the
higher the overpressures are.
The analysis has shown that a good agreement between the numerical results and
collected data can be obtained for the transients generated by the pump sudden stoppage due
to failure of the power grid, as long as a check valve manoeuver and the total motor-pump
inertia and power are calibrated based on collected transient pressure data. Nikuradse steady-
state friction formula for smooth-wall pipes was used for steady-state friction modelling and
Vítkovský et al., (2000) unsteady friction formulation was used for transient conditions. As
the pump stoppage without the influence of the back pressure corresponds to a slow transient,
the unsteady friction effects are not relevant, being absolutely indifferent considering this
phenomenon or not.
The numerical model that neglects the branch pipe between the HPV and the main
pipeline cannot accurately predict the overpressures observed. This is due to the non-
consideration of the fluid inertia inside the branch pipe, and consequently, the vessel actuates
instantaneously, controlling the surge, as the pressure rise due to the check valve closure.
Despite the good predictions of the maximum and minimum overpressures, the numerical
model could not describe the surge damping observed, which might be related with the
consideration of a mass lumped model for the water inside the branch and not an elastic
model. As future work, the dynamic equation of check valve should be included in the model

19
to betted describe this device for design purposes when there is no data for calibration. This
paper has highlighted the need for the development of more complete and robust hydraulic
transient solvers capable of describing observed real life phenomena, and that each system
has its specificities that when neglected (e.g., check valve closure, HPV branch) can lead to
wrong surges estimation that can put at stake the safety of the pipe system
ACKNOWLEDGMENTS
Authors would like to acknowledge “Fundação para a Ciência e Tecnologia” (FCT)
for the project PTDC/ECM/112868/2009 “Friction and mechanical energy dissipation in
pressurized transient flows: conceptual and experimental analysis” for funding the current
research in terms of experimental work and grants hold.
APPENDIX I - NOTATION
The following symbols are used in this paper:
a = elastic wave speed;
BPC = local headloss coefficient of the branch pipe;
VC = local headloss coefficient of the valve;
0C = constant of the polytropic gas equation.
1C = constant that depends upon the branch pipe characteristics
D = pipe inner diameter;
BPD = inner diameter of the branch pipe.
hF , F = head and torque suter Parameters;
sf = Darcy-Weisbach friction factor;
g = gravity acceleration;
H = piezometric head;
20
bH = barometric pressure head;
*
airPH = absolute pressure head;
PumpH = pump total developed head at the end of each time-step;
RH = pump rated pumping head;
UresH = upstream reservoir level;
h = dimensionless pumping head;
fh = friction losses per unit length;
sfh = steady-state component of the friction losses;
ufh = unsteady-state component of the friction losses;
k = constant that depends upon the headlosses on the branch pipe;
3k = decay coefficient of Vítkovský et al., (2000) formulation;
BPL = length of the branch pipe;
m = exponent of the polytropic gas equation;
N = pump rotational speed;
RN = pump rated rotational speed;
SN = specific rotational speed;
n = exponent of the flow;
Q = flow rate;
iQ = initial flow rate;
BPPQ , BPQ = flow rate through the branch pipe at the end and beginning of the time-step,
respectively;
RQ = pump rated flow rate;
Re = Reynolds number;
21
S = area of the pipe cross-section;
BPS = area of the branch pipe cross section;
HPVS = area of the hydropneumatic vessel cross-section;
VS = area of the valve cross-section;
T = pump torque;
RT = pump rated torque;
t = time coordinate;
airPV , airV = volume of air inside the hydropneumatic vessel at the end and beginning of the
time-step, respectively;
v = dimensionless flow rate;
2WR = combined polar moment of inertia of the pump, motor, shaft and liquid inside the
pump impeller;
PZ , Z = water level in the hydropneumatic vessel at the end and beginning of the time-step,
respectively;
VZ = valve elevation above the datum;
x = spatial coordinate along the pipe axis;
= dimensionless rotation speed;
= dimensionless torque;
t = time-step;
= relaxation coefficient for the flow-time derivative calculation;
' = kinematic fluid viscosity;
22
APPENDIX II - REFERENCES
Almeida, A. B., and Koelle, E. (1992). Fluid transients in pipe networks, Computational
Mechanics Publications, Elsevier Applied Science, Southampton, UK.
Bergant, A., Simpson, A.R., and Tijsseling, A.S. (2006). “Water hammer with column
separation: a historical review.” J. Fluids and Struct., 22(2), 135–171.
Brunone, B., Golia, U. M., and Greco, M. (1991). “Modelling of fast transients by numerical
methods.” Proc., Int. Meeting on Hydraulic Transients and Water Column Separation,
E. Cabrera and M. Fanelli, eds., IAHR, Valencia, Spain, 273–280.
Chaudhry, M. H. (1987). Applied hydraulic transients, 2nd Ed., Litton Educational, Van
Nostrand Reinhold, New York.
Covas, D. I. C. (2003). “Inverse transient analysis for leak detection and calibration of water
pipe systems–modelling special dynamic effects.” Ph.D. thesis, Univ. of London,
London.
Covas, D.I.C., Ramos, H. M., and Almeida, A.B. (2008) “Hydraulic transients in Socorridos
pump-storage hydropower system.” Proc. 10th Int. Conf. on Pressure Surges, Pub.
BHR Group Ltd., Edinburgh, UK, 47-63.
Delgado, J. (2013). “Hydraulic transients in pumping systems – numerical modelling and
experimental analysis.” M.S. thesis, Univ. of Lisbon, Lisbon.
Delgado, J., Martins, N., Covas, D.I.C. (2013). “Uncertainties in Hydraulic Transient
Modelling in Raising Pipe Systems: Laboratory Case Studies.” Proc., 12th Int. Conf.
on Computing and Control for the Water Industry, Perugia, Italy.
Lencastre, A. (1996). Hidráulica Geral,
Marchal, M., Flesh, G., and Suter, P. (1965). "The calculation of water hammer problems by
means of the digital computer." Proc. Int. Symp. Water hammer Pumped Storage
Projects, ASME, Chicago, USA.

23
Provoost, G. (1983). “A critical analysis to determine dynamic characteristics of non-return
valves.” Proc., 4th Int. Conf. on Pressure Surges, Bath, BHRA, Cranfields, England,
275-286.
Ramos, H., Almeida, A. B., Borga, A., and Anderson, A. (2005). “Simulation of severe
hydraulic transient conditions in hydro and pump systems.” Water Resour., 26(2), 7–
16.
Ramos, H. M., Covas, D.I.C., Borga, A., and Loureiro, D. (2004). “Surge damping analysis
in pipe systems: modelling and experiments.” J. Hydraul. Res., 42(4), 413-425.
Soares, A. K., Covas, D.I.C., Ramos, H. M. (2013). “Damping analysis of hydraulic
transients in pump-rising main systems.” J. Hydraul. Eng., 139(2), 233–243.
Thorley, A. R. D. (1983). “Dynamic response of check valves.” Proc., 4th Int. Conf. on
Pressure Surges, Bath, BHRA, Cranfields, England, 231-242.
Thorley, A. R. D. (1991). Fluid transients in pipeline systems, D&L George Ltd, Hadley
Wood, England.
Thorley, A. R. D., and Faithfull, E. M. (1992). “Inertias of pumps and their driving motors.”
Proc., Int. Conf. on Unsteady Flow and Fluid Transients, R. Bettess and J. Watts, eds.,
Balkema, Rotterdam, Netherlands, 285–289.
Vardy, A. E., and Brown, J. M. (2007). “Approximation of turbulent wall shear stresses in
highly transient pipe flows.” J. Hydraul. Eng., 133(11), 1219–1228.
Vítkovský, J. P., Lambert, M. F., and Simpson, A. R. (2000). "Advances in unsteady friction
modelling in transient pipe flow." Proc. 8th Int. Conf. on Pressure Surges, Pub. BHR
Group Ltd., The Hague, The Netherlands, 471-498.
White, F. M. (1999). Fluid Mechanics. 4th Edition. Singapore, McGraw-Hill.
Wylie, E. B., and Streeter, V. L. (1993). Fluid transients in systems, Prentice Hall,
Englewood Cliffs, NJ.

24
APPENDIX III – LIST OF FIGURES
Figure 1. Pump scheme used for the numerical model .............................................................. 5
Figure 2. Hydropneumatic vessel schematic ............................................................................. 6
Figure 3. Schematic of the experimental facility – adapted from Delgado (2013) .................... 7
Figure 4. Copper-pipe facility: (a) general view; (b) upstream view; (c) downstream view; (d)
data acquisition system .............................................................................................................. 9
Figure 5. Data collected at T1 for sudden pump stoppage for Q0 = 100 to 600 l/h: (a) without
back pressure; (b) with back pressure quasi-constant .............................................................. 10
Figure 6. Data collected at T1, T2 and T3 for sudden pump stoppage and Q0 = 600 l/h:
(a) without back pressure; (b) with back pressure quasi-constant ........................................... 10
Figure 7. Darcy-Weisbach friction factors comparison ........................................................... 13
Figure 8. Model calibration for sudden pump stoppage without air vessel Q0 = 600 l/h –
Check valve models 1 and 2: (a) piezometric head at downstream the pump; (b) flow rate
downstream the pump .............................................................................................................. 14
Figure 9. Model calibration for sudden pump stoppage without air vessel Q0= 600 l/h –
Check valve model 3 with and without UF: (a) piezometric head at downstream the pump; (b)
flow rate downstream the pump ............................................................................................... 14
Figure 10. Model validation for sudden pump stoppage without air vessel Q0 = 300 l/h –
Check valve model 3: (a) piezometric head at downstream the pump; (b) flow rate
downstream the pump .............................................................................................................. 16
Figure 11. Results of calibration for sudden pump stoppage with HPV for Q0 = 600 l/h –
model without branch pipe: (a) piezometric head downstream the pump; (b) flow rate
downstream the pump and check valve calibrated maneuver .................................................. 17

25
Figure 12. Results of calibration for sudden pump stoppage with HPV for Q0 = 600 l/h –
model with branch pipe: (a) piezometric head downstream the pump; (b) flow rate
downstream the pump and check valve calibrated maneuver .................................................. 17