job 4 rotor belitan edit oso
DESCRIPTION
ncdTRANSCRIPT
PERCOBAAN 2
MOTOR ASINKRON (MOTOR INDUKSI) ROTOR BELITAN
A. Tujuan Percobaan
Setelah melaksanakan percobaan ini, maka mahasiswa harus dapat :
a. Mengetahui cara kerja motor asinkron rotor belitan
b. Dapat mengoperasikan motor asinkron rotor belitan
c. Mengetahui rangkaian ekivalen motor asinkron
d. Memahami cara pengukuran untuk rata-rata geometri dan rata-rata
aritmatik.
e. Mengetahui karakteristik beban nol
f. Mengetahui karakteristik pembebanan terhadap putaran
B. Teori Dasar
Pada motor induksi arus rotor bukan diperoleh dari sumber tertentu, tetapi
merupakan arus yang terinduksi sebagai akibat perbedaan relatif antara putaran
rotor dengan medan putar yang dihasilkan oleh stator.
Konstruksi motor induksi tiga fasa Motor induksi tiga fasa memiliki dua
komponen dasar yaitu stator dan rotor, bagian rotor dipisahkan dengan bagian
stator oleh celah udara yang sempit (air gap) dengan jarak antara 0,4 mmsampai 4
mm. Tipe dari motor induksi tiga fasa berdasarkan lilitan pada rotor dibagi
menjadi dua macam yaitu rotor belitan (wound rotor) adalah tipe motor induksi
yang memiliki rotor terbuat dari lilitan yangsama dengan lilitan statornya dan
rotor sangkar tupai (Squirrel-cage rotor) yaitu tipe motor induksi dimana
konstruksi rotor tersusun oleh beberapa batangan logam yang dimasukkan
melewati slot-slot yang ada ada rotor motor induksi, kemudian setiap bagian
disatukan oleh cincin sehingga batangan logam terhubung singkat dengan
batangan logam yang lain.
Pada sebuah motor asinkron atau motor induksi rotor belitan mempunyai
sebuah belitan primer yang disebut stator (bagian yang diam) dan sebuah belitan
sekunder yang disebut rotor (bagian yang bergerak), yang dikenai suatu
4-1
rangkaian fluks yang berubah secara sinusoidal, komposisi ke 3 fluks dari masing-
masing fasa meimbulkan fluks putar pada celah udara, yang mana ada
perbandingan transformasi pada primer pada sisi stator dan sekunder pada sisi
rotor.
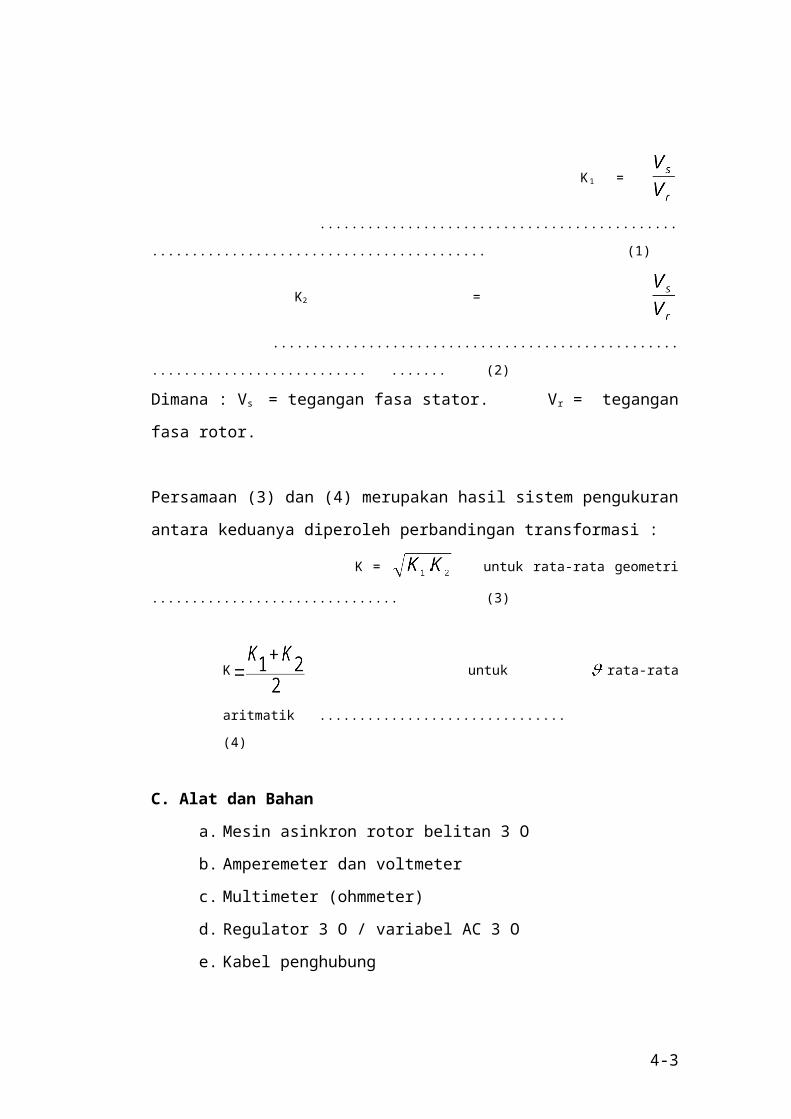
Persamaan (1) dan (2) tegangan melalui pemberian tegangan pada belitan stator
dan pada belitan rotor sebagai berikut :
K1 = ....................................................................................... (1)
K2 = .............................................................................. ....... (2)
Dimana : Vs = tegangan fasa stator. Vr = tegangan fasa rotor.
Persamaan (3) dan (4) merupakan hasil sistem pengukuran antara keduanya
diperoleh perbandingan transformasi :
K = untuk rata-rata geometri ............................... (3)
K untuk rata-rata aritmatik ............................... (4)
C. Alat dan Bahan
a. Mesin asinkron rotor belitan 3 O
b. Amperemeter dan voltmeter
c. Multimeter (ohmmeter)
d. Regulator 3 O / variabel AC 3 O
e. Kabel penghubung
4-2
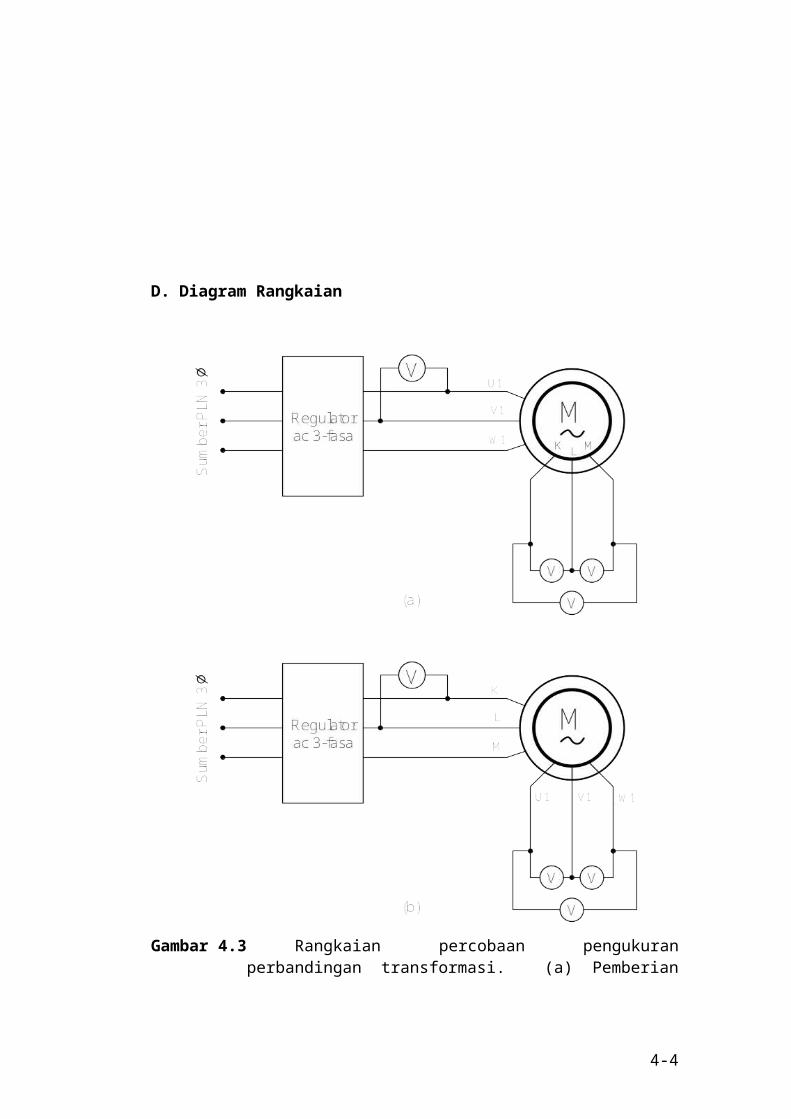
D. Diagram Rangkaian
Gambar 4.3 Rangkaian percobaan pengukuran perbandingan transformasi. (a) Pemberian tegangan melalui belitan stator. (b) Pemberian tegangan melalui belitan rotor.
4-3
E. Prosedur Percobaan
1. Mencatat data yang tercantum pada name plat mesin asinkron yang
akan dipraktekkan.
2. Mengukur tahanan belitan stator (U1-U2, V1-V2 dan W1-W2) dan
tahanan belitan rotor (K-L, K-M, L-M) dengan multimeter(Ohm-
Meter) Memasukkan data pada tabel 4.1.
3. Mengukur tahanan belitan stator (U1-U2, V1-V2 dan W1-W2) dan
tahanan belitan rotor (K-L, K-M, L-M) dengan metode voltmeter-
amperemeter. Seperti pada gambar 4.2. Memasukkan data pada tabel
4.2.
4. Mengukur tahanan isolasi antara belitan stator (U1-V1, U1-W1, W1-
V1) antara belitan stator dengan belitan rotor (U1-K, U1-L, U1-M, V1-
K, V1-L, V1-M, W1-K, W1-L, W1-M) antara belitan stator dengan
rangka mesin dan antara belitan rotor dengan rangka mesin dengan
menggunakan multimeter dan megger. Memasukkan data pada tabel
4.3.
5. Kemudian merangkai seperti pada gambar 4.3 dan memberikan
tegangan pada belitan stator secara bertahap dan mengukur tegangan
stator dan rotornya (rangkaian rotor pada cincinnya tidak dihubung
singkat). Kemudian memasukkan dalam tabel 4.4
6. Merangkai seperti pada gambar 4.3 dan memberikan tegangan pada
belitan rotor secara bertahap dengan 10 V, 20 V, dan 30 V . Kemudian
memasukkan ke dalam tabel 4.4
4-4
Spesifikasi Motor Asinkron 3 O
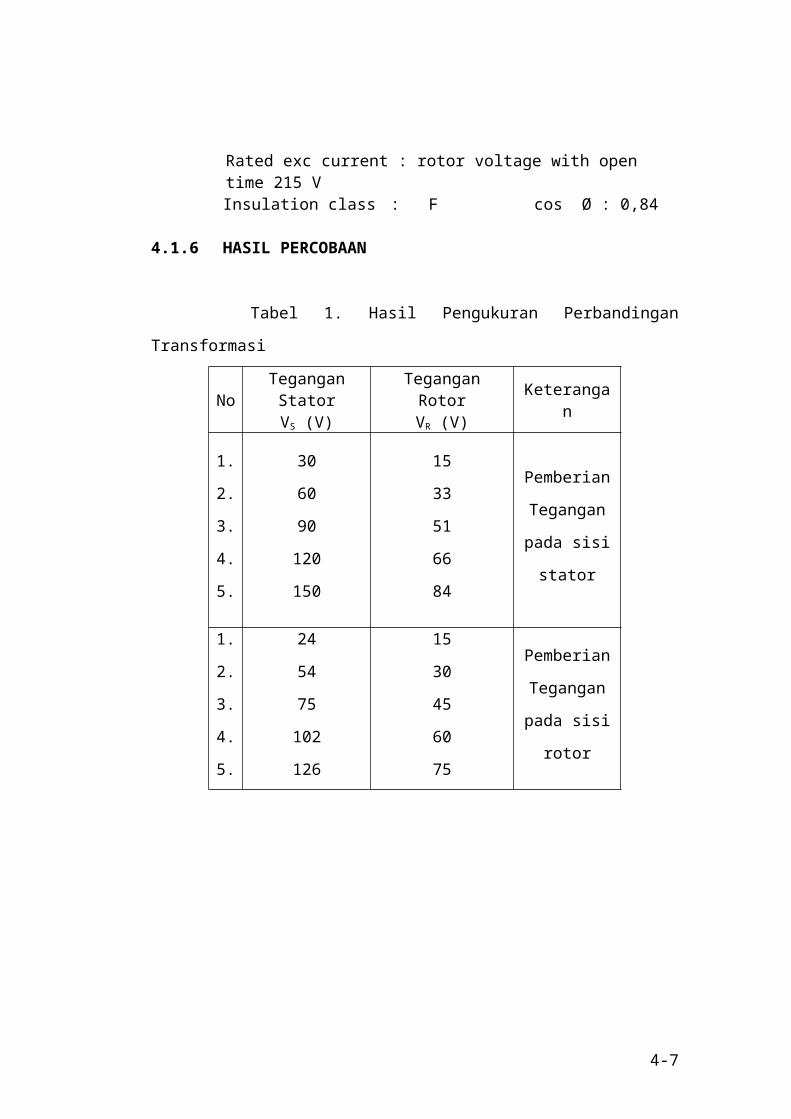
Motor Asinkron 3 O : Type : DL 2052/5 n° = 068703Rated voltage : 220 / 380 VRated current : 21,3 / 12,3 ARated power : 5,5 kWRated Speed : 2840 G/1 AT : 50 HzRated exc current : rotor voltage with open time 215 VInsulation class : F cos Ø : 0,84
4.1.6 HASIL PERCOBAAN
Tabel 1. Hasil Pengukuran Perbandingan Transformasi
NoTegangan Stator
VS (V)Tegangan Rotor
VR (V)Keterangan
1.
2.
3.
4.
5.
30
60
90
120
150
15
33
51
66
84
Pemberian
Tegangan
pada sisi
stator
1.
2.
3.
4.
5.
24
54
75
102
126
15
30
45
60
75
Pemberian
Tegangan
pada sisi rotor
4-5
4.1.7 ANALISA HASIL PERCOBAAN
Perbandingan tegangan melalui pemberian tegangan pada belitan stator di ambil data pada tabel no. 3. sebagai berikut :
Dik : Vs = 30 volt
Vr = 16 volt
Dit : K1 = ... ?
Penyelesaian :
K1 =
=
= 1,88
Perbandingan tegangan melalui pemberian tegangan pada belitan rotor di ambil data pada tabel no. 3. sebagai berikut :
Dik : Vs = 30 volt
Vr = 45 volt
Dit : K2 = ... ?
Penyelesaian :
K2 =
=
= 0.67
Untuk mencari rata-rata geometri yang merupakan hasil sistem pengukuran maka diambil contoh no. 03 sebagai berikut :
Dik K1 = 1,88K2 = 0,67
4-6
Dit K rata-rata geometri = ... ?
Penyelesaian :
K =
=
= 0,92
Untuk mencari rata-rata aritmatik yang merupakan hasil sistem pengukuran maka diambil contoh no. 03 sebagai berikut :
Dik K1 = 1,88
K2 = 0,67
Dit K rata-rata aritmatik = ... ?
Penyelesaian :
K =
=
= 1,28
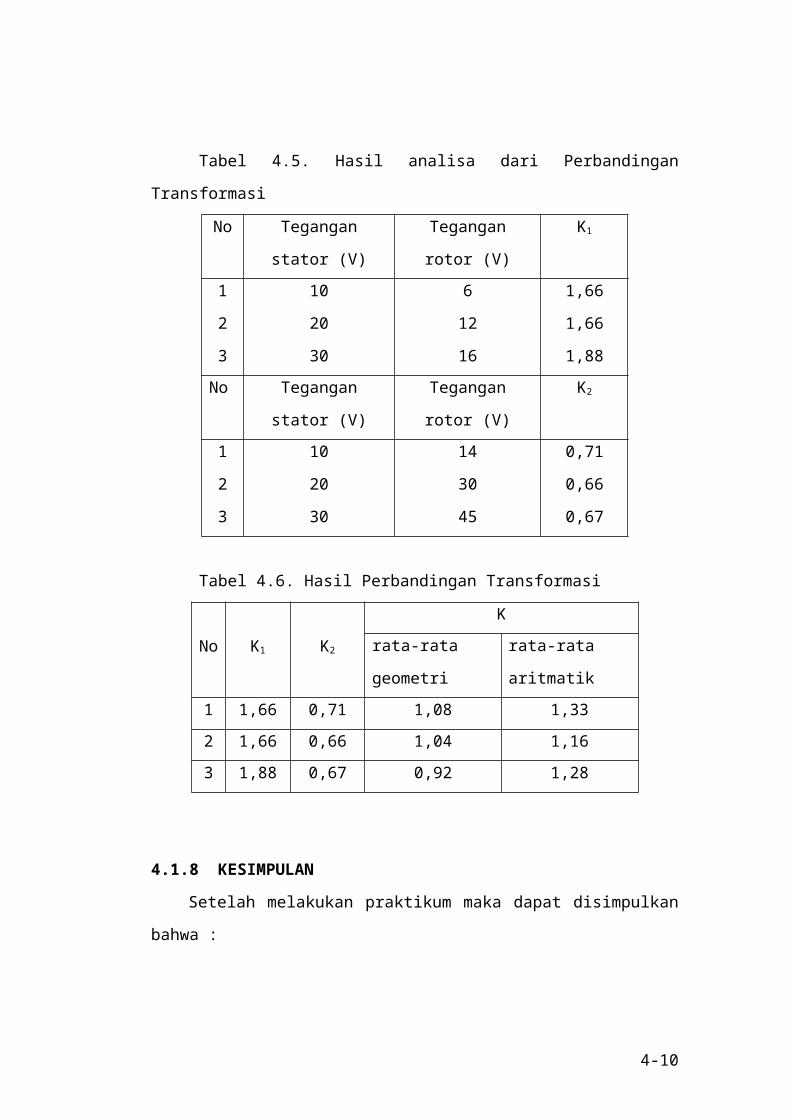
Tabel 4.5. Hasil analisa dari Perbandingan Transformasi
No Tegangan stator (V) Tegangan rotor (V) K1
1
2
3
10
20
30
6
12
16
1,66
1,66
1,88
No Tegangan stator (V) Tegangan rotor (V) K2
1
2
3
10
20
30
14
30
45
0,71
0,66
0,67
Tabel 4.6. Hasil Perbandingan Transformasi
No K1 K2
K
rata-rata geometri rata-rata aritmatik
1 1,66 0,71 1,08 1,33
2 1,66 0,66 1,04 1,16
4-7
3 1,88 0,67 0,92 1,28
4.1.8 KESIMPULAN
Setelah melakukan praktikum maka dapat disimpulkan bahwa :
o Terdapat perbedaan pengukuran antara tahanan isolasi pada instrument
dengan menggunakan ohm-meter dan Meger adalah pada instrument
ohm-meter mengukur sampai tak terhingga hanya sampai kΩ,
sedangkan instrument Megger nilai terbaca sampai MΩ.
o Nilai K untuk hasil perbandingan rata-rata geometri lebih kecil
dibandingkan dengan rata-rata aritmatik hasil tersebut dapat dilihat
pada tabel 4.6.
4.2 PERCOBAAN DINAMIS
4.2.1 Tujuan Percobaan
Karakteristik beban nol :V0 terhadap Io = f(Vo), Po = f(Vo),Untuk
mengetahui pengaruh tegangan masukan beban nol terhadap arus
beban nol (I0), dan daya beban nol (P0) pada motor asinkron/motor
induksi.
Karakteristik hubung singkat : Vhs = f(Ihs) terhadap, Phs = f(Ihs), Ihs =
f(Ihs),Untuk mengetahui pengaruh arus hubung singkat : terhadap
daya, tegangan pada motor asinkron
4.2.2 Teori Dasar
Motor induksi rotor belitan mempunyai rotor dengan belitan kumparan 3 O
yang sama seperti kumparan stator. Kumparan motor dan stator juga mempunyai
4-8
jumlah kutub yang sama. Penambahan tahanan luar sampai harga tertentu, dapat
kopel mula mencapai harga kopel maksimumnya. Kopel mula yang besar memang
diperlukan pada saat menekan push button.
Motor induksi dengan rotor belitan, pada rotornya terdapat belitan
kawat dan teminalnya dihubungkan dengan slipring sehingga tahanan pada
belitan rotornya dapat diatur dengan menambahkan tahanan luar melalui
slipringnya dan akan berfungsi sebagai pembatas arus mula ( memperkecil
arus mula ).Teori tersebut diatas diungkapkan oleh Donald P. Eckman, Automatic
Process Control, hal. 7-8, Alastair Ross Dynamic Factory Automation, hal 13-21.
Pengereman secara elektrik, torsi pengereman dihasilkan berdasarkan nilai
arus injeksi yang diberikan pada belitan stator. Pada pengereman secara elektrik
energi putaran rotor diubah menjadi energi elektrik yang kemudian dikembalikan
ke supply daya, atau dengan memberikan suatu medan magnet stasioner pada
stator sehingga putaran rotor akan berkurangdengan sendirinya, pengereman
secara elektrik lebih halus dan tidak ada hentakan yang terjadi.
Pengereman secara elektrik tidak dapat menghasilkan torsi untuk menahan
beban dalam keadaan sudah berhenti dan membutuhkan sumber energi listrik
untuk mengoperasikannya. Motor induksi dengan rotor belitan memungkin
penambahan pengaturan tahanan luar. Tahanan luar yang dapat diatur ini
dihubungkan ke rotor melalui cincin. Selain itu menghasilkan kopel mula yang
besar, tahanan luar ini diperlukan untuk membatasi arus mula yang besar pada
saat start. Di samping itu dengan mengubah-ubah tahanan luar, kecepatan motor
divariabelkan.
Pengereman dinamik pada motor Induksi tiga fasa Sebelum melaksanakan
percobaan pengereman dinamik terlebih dahulu melakukan perhitungan besar
arus.
4.2.2.1 Karakteristik Beban Nol (R = 0 )
Maksud dan tujuan percobaan beban nol dari motor induksi ini untuk
mendapatkan data mengenai arus, daya serta rugi-rugi pada waktu beban nol.
Daya input sama dengan jumlah semua rugi pada keadaan beban nol,
yaitu rugi tembaga stator, rugi besi dan rugi mekanik (friksi dan angin). Dengan
4-9
mengukur arus beban nol (Io), tegangan beban nol (Vo) dan daya pada kondisi
beban nol (Po), maka cos beban nol dapat dihitung. Bentuk karakteristik pada
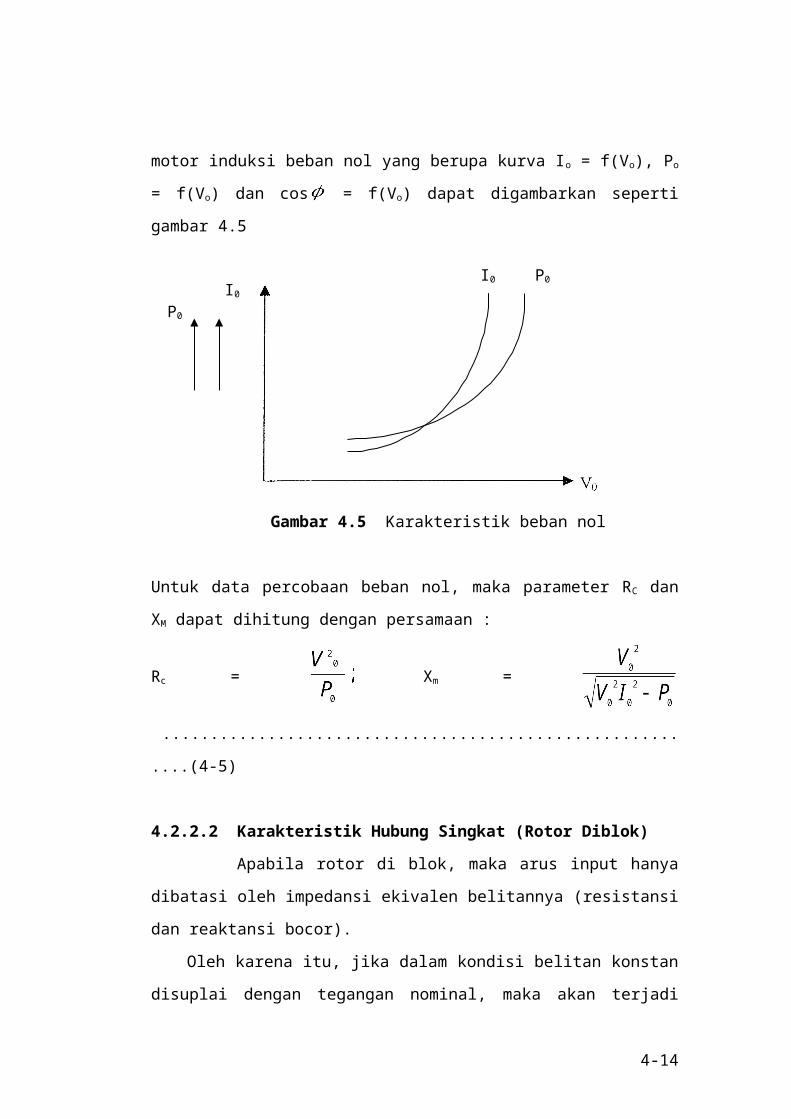
percobaan motor induksi beban nol yang berupa kurva Io = f(Vo), Po = f(Vo) dan
cos = f(Vo) dapat digambarkan seperti gambar 4.5
Gambar 4.5 Karakteristik beban nol
Untuk data percobaan beban nol, maka parameter RC dan XM dapat dihitung
dengan persamaan :
Rc = Xm = ..........................................................(4-5)
4.2.2.2 Karakteristik Hubung Singkat (Rotor Diblok)
Apabila rotor di blok, maka arus input hanya dibatasi oleh impedansi
ekivalen belitannya (resistansi dan reaktansi bocor).
Oleh karena itu, jika dalam kondisi belitan konstan disuplai dengan tegangan
nominal, maka akan terjadi arus yang sangat tinggi yang secara teknis dapat
merusak belitan, sehingga pada percobaan hubung singkat biasanya dilaksanakan
dengan mensuplai motor dengan tegangan yang diturunkan secukupnya sampai
arus tidak melebihi batas rating-nya .
Besar-besaran pada saat tegangan nominal merupakan harga yang dicari dan
dihitung dengan menggunakan perbandingan arus dan tegangannya. Hal ini
4-10
I0 P0
I0 P0
dianggap bahwa apabila tegangan suplai bervariasi, reaktansi bocor dan resistansi
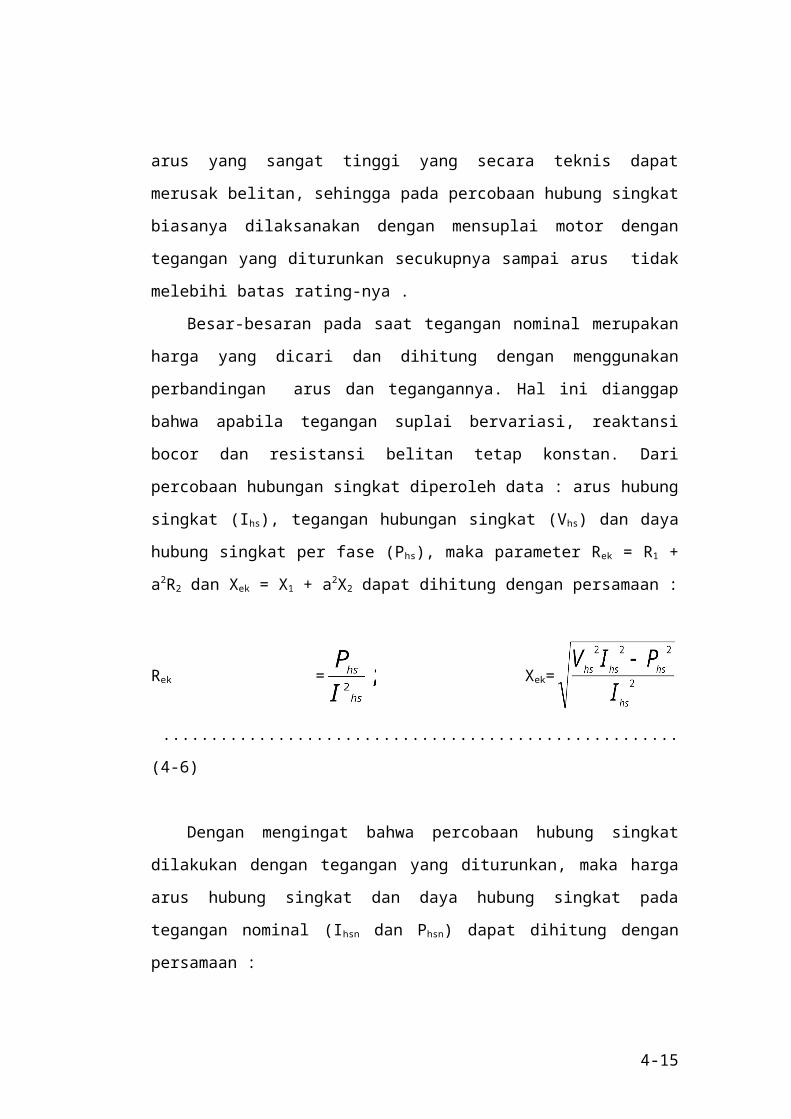
belitan tetap konstan. Dari percobaan hubungan singkat diperoleh data : arus
hubung singkat (Ihs), tegangan hubungan singkat (Vhs) dan daya hubung singkat
per fase (Phs), maka parameter Rek = R1 + a2R2 dan Xek = X1 + a2X2 dapat dihitung
dengan persamaan :
Rek = Xek= ......................................................(4-6)
Dengan mengingat bahwa percobaan hubung singkat dilakukan dengan
tegangan yang diturunkan, maka harga arus hubung singkat dan daya hubung
singkat pada tegangan nominal (Ihsn dan Phsn) dapat dihitung dengan persamaan :
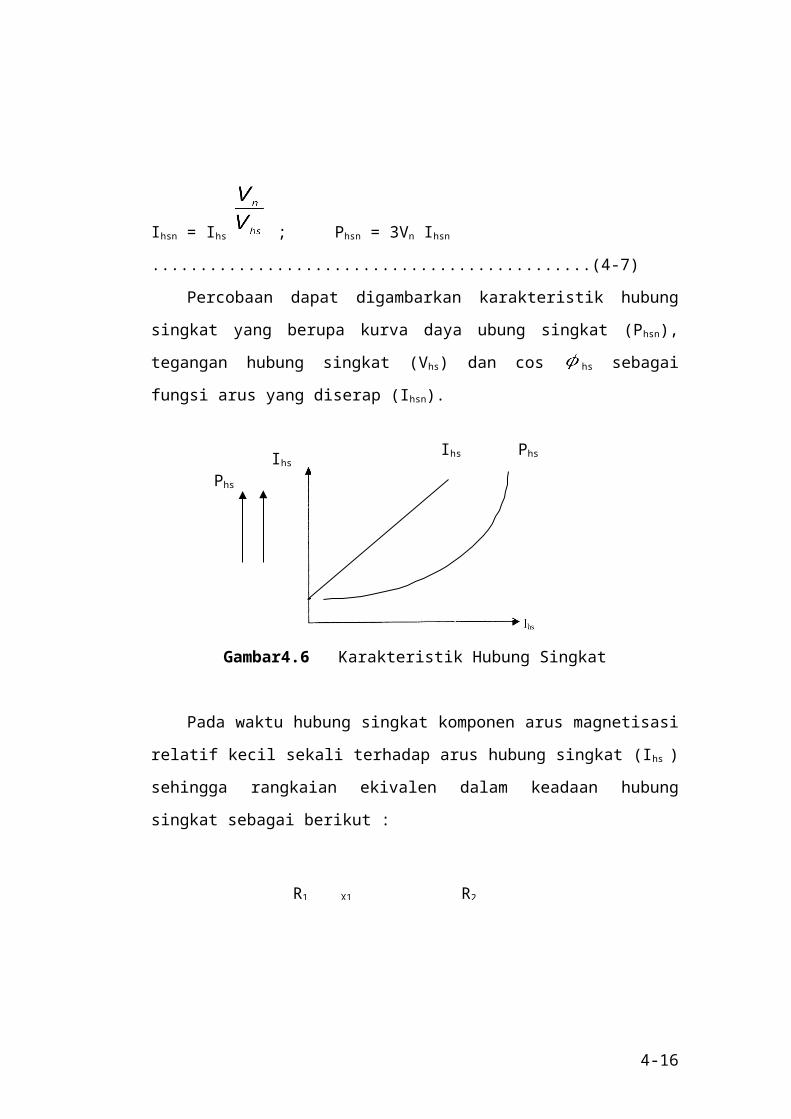
Ihsn = Ihs ; Phsn = 3Vn Ihsn ..............................................(4-7)
Percobaan dapat digambarkan karakteristik hubung singkat yang berupa
kurva daya ubung singkat (Phsn), tegangan hubung singkat (Vhs) dan cos hs
sebagai fungsi arus yang diserap (Ihsn).
Gambar4.6 Karakteristik Hubung Singkat
4-11
Ihs PhsIhs Phs
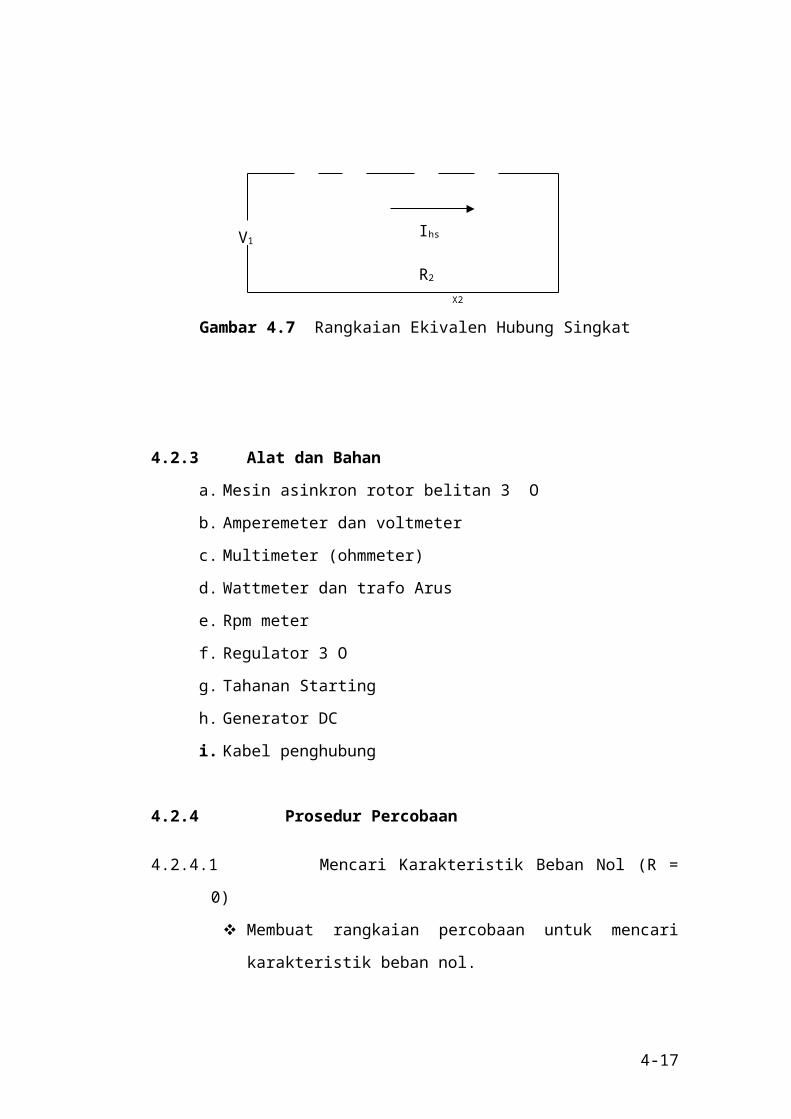
Pada waktu hubung singkat komponen arus magnetisasi relatif kecil sekali
terhadap arus hubung singkat (Ihs ) sehingga rangkaian ekivalen dalam keadaan
hubung singkat sebagai berikut :
Gambar 4.7 Rangkaian Ekivalen Hubung Singkat
4.2.3 Alat dan Bahan
a. Mesin asinkron rotor belitan 3 O
b. Amperemeter dan voltmeter
c. Multimeter (ohmmeter)
d. Wattmeter dan trafo Arus
e. Rpm meter
f. Regulator 3 O
g. Tahanan Starting
h. Generator DC
i. Kabel penghubung
4.2.4 Prosedur Percobaan
4.2.4.1 Mencari Karakteristik Beban Nol (R = 0)
Membuat rangkaian percobaan untuk mencari karakteristik beban
nol.
V1Ihs R2
X2
4-12
R1 X1 R2 X2
Merangkai rangkaian sesuai dengan instruksi pembimbing.
Tegangan diatur dari nol sampai tegangan nominal. Pengambilan
data dilakukan dari tegangan yang paling tinggi (tegangan
nominal) dan diturunkan secara bertahap.
Mencatat hasil pengukuran kedalam tabel yang tersedia.
4.2.4.2 Mencari Karakteristik Hubung Singkat
Membuat rangkaian percobaan unuk mencari karakteristik hubung
singkat
Merangkai rangkaian sesuai dengan instruksi pembimbing.
Mencatat hasil pengukuran kedalam tabel yang tersedia
4-13
4.2.5 Diagram Rangkaian
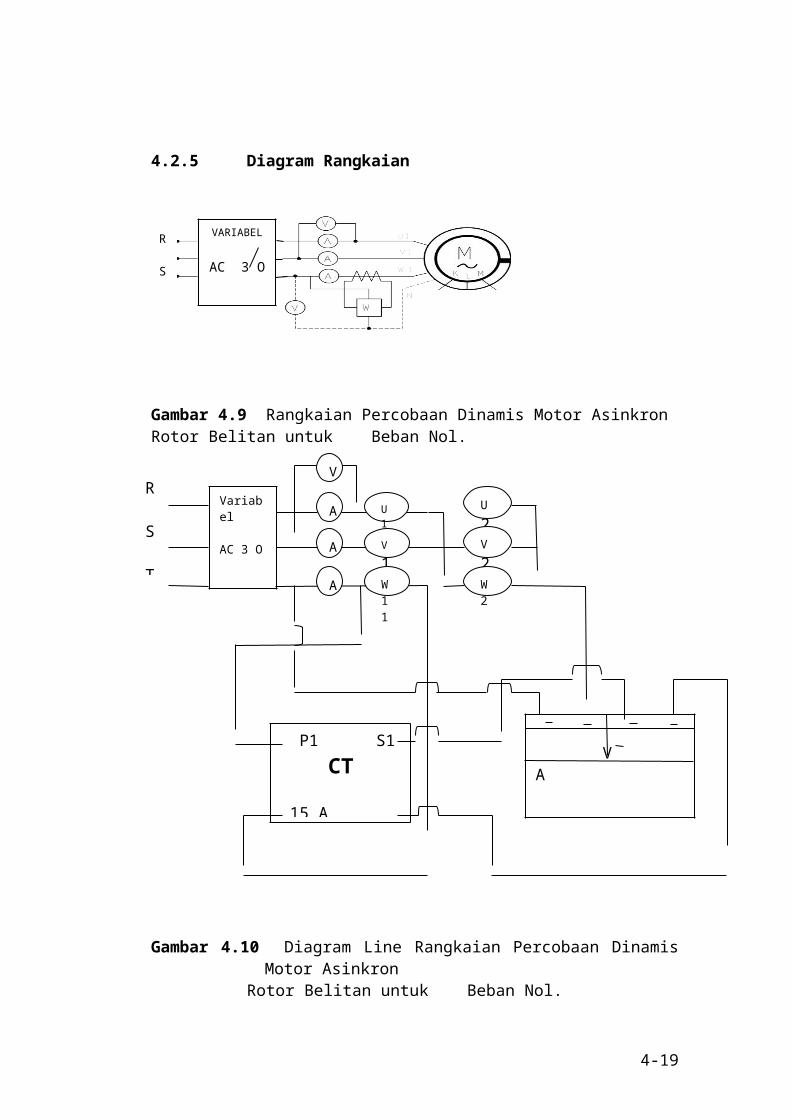
Gambar 4.9 Rangkaian Percobaan Dinamis Motor Asinkron Rotor Belitan untuk Beban Nol.
Gambar 4.10 Diagram Line Rangkaian Percobaan Dinamis Motor AsinkronRotor Belitan untuk Beban Nol.
4-14
Variabel
AC 3 O
VARIABEL
AC 3 O
R
S T
Variabel
AC 3 O
P1 S1
CT 15 A S2
V A
W
A
V
A
A
U1
V
1W11
U
2V
22W2
R
S
T
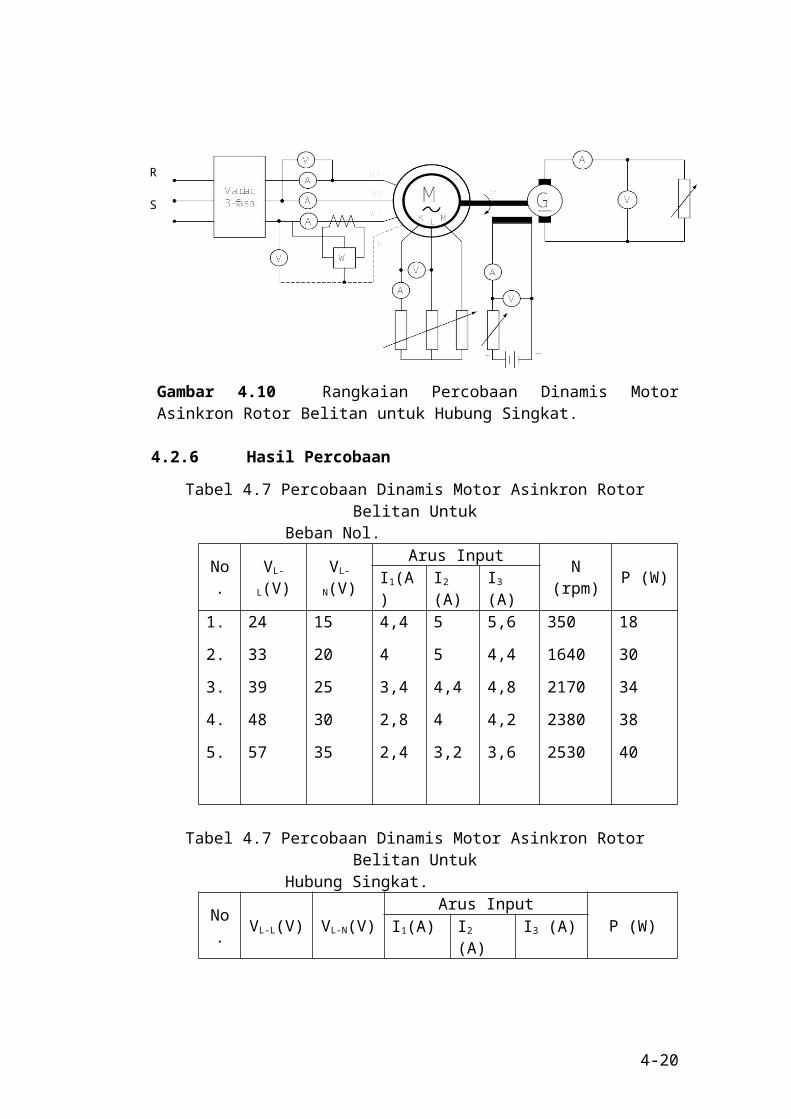
Gambar 4.10 Rangkaian Percobaan Dinamis Motor Asinkron Rotor Belitan untuk Hubung Singkat.
4.2.6 Hasil Percobaan
Tabel 4.7 Percobaan Dinamis Motor Asinkron Rotor Belitan Untuk Beban Nol.
No. VL-L(V) VL-N(V)Arus Input
N (rpm) P (W)I1(A) I2 (A) I3 (A)
1.
2.
3.
4.
5.
24
33
39
48
57
15
20
25
30
35
4,4
4
3,4
2,8
2,4
5
5
4,4
4
3,2
5,6
4,4
4,8
4,2
3,6
350
1640
2170
2380
2530
18
30
34
38
40
Tabel 4.7 Percobaan Dinamis Motor Asinkron Rotor Belitan Untuk Hubung Singkat.
No. VL-L(V) VL-N(V)Arus Input
P (W)I1(A) I2 (A) I3 (A)
1.
2.
3.
4.
75
57
39
48
15
20
25
30
3,6
7,2
8,4
10,8
3,6
8,4
9,2
11,8
3
8,8
9,8
13
20
40
52
84
4.2.7 Analisa Hasil Percobaan
4-15
R
S T
4.2.7.1 Untuk mencari parameter Rc dan Xm pada percobaan beban nol sebagai berikut sebagai contoh data no.03.
Dik : Vo = 39 Volt
Po = 34 Volt
Io = 4,2 Ampere
Dit : a. Rc = ……….?
b. Xm = ………?
Peny :
a. Rc =
=
= 44,74 Ω
b. Xm =
=
= 9,29 Ω
4.2.7.2 Untuk mencari parameter Rek dan Xek pada percobaan hubung singkat sebagai berikut sebagai contoh data no.03.
Dik : Ihs = 52 A
Vn = 9,1 V
Vhs = 39 V
Dit : a. : Rek = ………….?
b. : Xek = ………….?
Peny :
4-16
a. Rek =
=
= 0,63 Ω
b. Xek =
= = 4,28 Ω
4.2.7.3 Untuk mencari parameter arus hubung singkat dan daya hubung singkat pada tegangan nominal (Ihsn dan Phsn) sebagai contoh data no.03.
Dik : Ihs = 9,1 A
Vn = 25 V
Vhs = 39 V
Dit : a. : Ihsn = ………….?
b. : Phsn = ………….?
Peny :
a. Ihsn = Ihsn
= 9,1
= 5,8 A
b. Phsn = 3 x Vn x Ihsn
= 3 x 25 x 5,8
= 435 W
4-17
Tabel 4.8 Hasil Percobaan Rc dan Xm Pada Percobaan Beban Nol.
No. VL-L(V) Arus Input (A) P (W) Rc (Ω) Xm (Ω)
1.
2.
3.
4.
5.
24
38
39
48
57
5
4,2
4,2
3,7
3,1
18
30
34
38
40
32
36,3
44,74
60,6
81,23
4,8
7,86
9,29
12,98
32,44
Tabel 4.9 Hasil Percobaan Rek dan Xek Pada Percobaan Hubung Singkat.
No. VL-L(V) Arus Input (A) P (W) Rc (Ω) Xm (Ω)
1.
2.
3.
4.
48
39
57
75
3,4
8,1
9,1
11,9
20
40
52
84
1,73
0,61
0,63
0,59
21,76
7,04
4,28
4,03
Tabel 4.10 Hasil Percobaan Ihsn dan Phsn Pada Percobaan Hubung Singkat.
No. VL-L(V) VL-N (V) Arus Input (A) Ihsn (A) Phsn (W)
1.
2.
3.
4.
4
8
39
57
75
15
20
25
30
3,4
8,1
9,1
11,9
0,68
2,84
5,8
7,44
30,6
170,4
435
669,6
4-18
4.2.7.4 Grafik
4-19
Hubungan antara tegangan beban nol V0 terhadap P0 dan I0
I0
P0
Phs,Vhs
V0
Hubungan antara tegangan beban nol Ihs terhadap Phs dan Ihs
Phs
Ihs
Vhs
P0, I0
4.2.8 KESIMPULAN
1. Karakteristik beban nol : V0= f (Vo) terhadap Io = f(Vo), Po = f(Vo),
Pengaruh tegangan beban nol (V0) terhadap arus beban nol (I0) dan
daya beban nol (P0) berpengaruh sangat besar yakni semakin besar
tegangan maka arus dan daya semakin besar pula daya dan arusnya
2. Karakteristik hubung singkat : Ihs= f (Vo) terhadap Phs = f(Ihs), Vhs =
f(Ihs).
Pengaruh arus hubung singkat (Ihs) terhadap daya hubung singkat
(Phs) dan tegangan hubung singkat (Vhs) yakni semakin besar arus
maka tegangan dan daya akan semakin besar pula.
4-20