investigating the influence of dependence between ... the influence of dependence between variables...
TRANSCRIPT

Paper No.: 16-2432
Investigating the Influence of Dependence between Variables on Crash
Modification Factors Developed using Regression Models
By
Lingtao Wu*
Ph.D. Candidate, Zachry Department of Civil Engineering
Texas A&M University, 3136 TAMU
College Station, Texas 77843-3136
Phone: 979-587-3518, fax: 979-845-6481
Email: [email protected]
and
Dominique Lord, Ph.D.
Professor
Zachry Department of Civil Engineering
Texas A&M University, 3136 TAMU
College Station, Texas 77843-3136
Phone: 979-458-3949, fax: 979-845-6481
Email: [email protected]
Word count: 6,620 Words (4,870 Text + 5 Tables + 2 Figures)
November 15, 2015
*Corresponding author

Wu and Lord 2
ABSTRACT 1
Cross-sectional studies (particularly regression models) are commonly used for developing crash 2
modification factors (CMFs), especially when data for before-after studies are not available. A 3
major assumption with the frequently used regression models is that variables are independent of 4
each other. However, some studies have shown that this assumption may not always be true. The 5
quality of CMFs may potentially be affected under such circumstances. This study examined the 6
accuracy of CMFs estimated using regression models under the conditions that some variables 7
influenced crashes dependently, and quantified the amount of bias as a function of the 8
dependence. An adjustment factor (AF) was introduced to capture the degree of the dependence. 9
Using similar approach proposed in the authors’ previous work, various fixed CMFs and AFs 10
were assumed for two variables. Crash counts were randomly generated and CMFs were 11
estimated using regression models. Their qualities were evaluated. The main findings are 12
summarized as follows: (1) the commonly used regression models can produce biased CMFs if 13
the considered variables are not independent; (2) the bias is significantly correlated with the AF 14
(i.e., degree of the dependence of variables) and higher dependence leads to significant bias; and 15
(3) while the coefficients for the variables of interests are over- or underestimated, other 16
variables may be under- or overestimated to compensate for the biased estimated coefficients. 17
Safety analysts are recommended to examine the independence of variables when estimating 18
multiple CMFs using regression models. 19

Wu and Lord 3
INTRODUCTION 1
To address specific safety concerns, it is common for agencies to implement multiple 2
countermeasures at a given problematic entity (e.g., a hotspot) simultaneously. The safety 3
effectiveness of these treatments is usually evaluated after a certain period of the improvements. 4
Before-after studies are frequently used to estimate the effectiveness of treatments, mostly 5
quantified in forms of crash modification factors (CMFs). In general, a before-after study is only 6
able to estimate the combined CMF of multiple treatments, even though a few attempts have 7
been made to separate them using adjusted before-after methods (1). Alternatively, safety 8
analysts have utilized cross-sectional studies, particularly using regression models (or safety 9
performance functions, SPFs), to develop CMFs for individual treatments (2). 10
Although SPFs have been widely used for developing CMFs, some researchers have 11
pointed out that those CMFs may not be reliable because the cause and effect relationship 12
between crashes and variables cannot be properly captured in SPFs under some conditions (3-9). 13
For example, a critical assumption within the commonly used generalized linear models (GLMs) 14
is that the variables considered are influencing crashes independently. The safety effect of one 15
treatment will not be influenced by other measures implemented simultaneously. Under this 16
assumption, the combined CMF of multiple treatments is calculated as the product of CMFs for 17
individual treatments, as documented in the Highway Safety Manual (HSM) (10). However, this 18
assumption may be invalid in practice. The simultaneously implemented treatments might 19
overlap each other in reducing crashes, especially when the target crashes are the same. The 20
HSM also cautions users that the method of multiplying individual CMFs may over- or 21
underestimate the actual CMF for a combined improvement. Researchers have proposed 22
alternative methods to calculate combined CMFs from individuals to address this problem (11; 23
12). Because of this, estimating the combined effects of safety countermeasures has become an 24
emerging topic in recent years (13-15). Most of these studies confirmed the fact that the 25
combined CMF for multiple treatments does not equal to the simple product of single CMFs, 26
indicating these countermeasures are not independent. In this condition, the individual CMFs 27
derived from regression models may be biased. Considering the large number of CMFs in the 28
HSM and CMF Clearinghouse derived from regression models, it is necessary to examine the 29
accuracy of CMFs developed using regression models under the conditions that simultaneously 30
implemented treatments are not independently influencing crashes. 31
This study expands on recent work (i.e., (16)) preformed on the validation of CMFs 32
derived from cross-sectional studies using regression models, particularly focusing on the 33
conditions when variables are not independent. The primary objectives are to examine the 34
accuracy of CMFs derived from SPFs considering variables overlapping in reducing crashes and 35
to quantify the bias. 36
BACKGROUND 37
A number of CMFs for various single treatments of roadway segments and intersections are 38
provided in the HSM. No CMFs for combined treatments are available in the current version. 39
However, it is common in practice that multiple countermeasures are implemented 40
simultaneously at a site to reduce the number and severity of collisions. The recommended 41
approach (HSM method) of calculating the combined CMF for multiple treatments is multiplying 42
Wu and Lord 4
the CMFs for individual elements or treatments together, as shown in Equation 1. Very limited 1
combined safety effects have been reported in the CMF Clearinghouse (17). 2
1 2 ncomb X X XCMF CMF CMF CMF (1) 3
Where, 4
combCMF = the combined CMF for n elements or treatments ( 1X , 2X , , nX ); and, 5
iXCMF = the specific CMF for element or treatment iX . 6
The main concept of this approach is that the simultaneously implemented treatments are 7
considered independent. The safety effect of various countermeasures will not overlap when 8
implemented at the same time. But this is not always true, especially when the target crashes of 9
these countermeasures are the same. In such cases, the expected reduction in number of crashes 10
will usually be lower than the sum of individual treatments. And the product of individual CMFs 11
will underestimate the true combined CMF (i.e., safety benefits are overestimated) (18-20). To 12
address this problem, researchers have proposed a couple of alternatives for estimating combined 13
effects of multiple treatments, e.g., reducing the safety effects of less effective treatments, 14
applying only the most effective CMF, multiplying weighted factor (Turner method), weighted 15
average of multiple CMFs (also known as meta-analysis method), etc. Readers are referred to 16
(11), (12) and (21) for more details of these methods. A common concept within these 17
approaches is that simultaneously implemented treatments usually have overlapped safety 18
effects. 19
Park et al. (13) estimated CMFs for two single treatments (installing shoulder rumble 20
strips, and widening shoulder width) and the combined CMF for implementing the two 21
simultaneously on rural multilane highways. The results confirmed that the combined CMFs, in 22
general, did not equal to the product of the two single CMFs. The researchers further calculated 23
CMFs for multiple treatments using various combining methods and compared them with those 24
estimated using real data. It was found that each method applied to different crash types and 25
injury levels. 26
Park and Abdel-Aty (22) later developed adjustment functions for combined CMFs. An 27
adjustment factor (AF) or adjustment function (A-Function) was introduced to assess the 28
combined safety effects of two treatments (installing shoulder rumble strips, and widening 29
shoulder width) on rural two-lane highways. An AF higher than 1.0 indicated the combined 30
amount of crash reduction will be lower than the sum of individual treatments. And vice versa if 31
it was less than 1.0. Particularly, when it equaled to 1.0, the treatments were independent of each 32
other. The AF (or A-Function) used in the study is shown in Equation 2. 33
1 2 ncomb X X XCMF CMF CMF CMF AF (2) 34
Where, 35
AF = the adjustment factor for treatments 1X , 2X , , nX , AF > 0. 36
Three nonlinear A-Functions for the combined CMFs were developed considering 37
different crash types and severities. All of them were higher than 1.0, which indicated the 38
combined CMFs calculated using HSM method were underestimated. The amount of 39
underestimation varied based on crash types and severities. In addition, the AFs also varied as 40

Wu and Lord 5
the original shoulder width changed rather than kept as constant values. That means the level of 1
dependence between the two treatments was not identical among all conditions. 2
More recently, Park and Abdel-Aty (15) assessed the safety effects of multiple roadside 3
treatments (i.e., poles, trees, etc.) using GLM, GNM, and multivariate adaptive regression splines 4
(MARS) model. The MARS model could capture both nonlinear relationships and interaction 5
impacts between variables. Results generally showed that GNMs provided a slightly better fit 6
than GLMs, and MARS model outperformed the other two. The results from the MARS model 7
showed that the HSM combining method overestimated the combined safety effects of roadside 8
treatments by about eight to ten percent. The authors recommended the MARS model to be 9
considered when assessing safety effects of multiple treatments. 10
Although only a few studies estimated the combined effects of multiple safety treatments 11
(13; 15; 22-25), it has shown that some treatments or highway characteristics do influence 12
crashes dependently. Under such conditions, the independence assumption of commonly used 13
regression models cannot be met. This might potentially reduce the quality of CMFs. No matter 14
which CMF combination method is used, reliable individual CMFs are critical for estimating 15
safety effects of both combined and single treatments. So, it is necessary to examine the accuracy 16
of individual CMFs derived from regression models considering the dependence of variables. 17
METHODOLOGY 18
To examine the accuracy of CMFs derived from SPFs when variables influence crash risk 19
dependently, this study used simulated data. A similar approach as the one used in the authors’ 20
previous work (i.e., (16)) was adopted here, but was modified to fit the specific characteristics of 21
the study. The approach was first proposed by Hauer (3). The main concepts are: (1) assume 22
CMFs and the dependence for variables; (2) generate random crash counts; and (3) estimate 23
CMFs using SPFs and compare them with the assumed true values. The detailed characteristics 24
of the simulation procedures are not described in this paper due to the space limitation. Curious 25
readers are referred to (16). 26
The major difference in this study was the use of adjustment factors. An adjustment 27
factor was assumed to capture the combination effect of multiple treatments. This was similar to 28
the method used in the recent study by Park and Abdel-Aty (22). The combined CMF for 29
multiple treatments is calculated by Equation 3. 30
11 1
1
nX X X Xbase n nbase
n
I X I X
comb X XCMF CMF CMF AF (3) 31
Where, 32
combCMF = the combined CMF for a segment; 33
jXCMF = the assumed specific CMF for variable jX of the segment; 34
AF = assumed adjustment factor for variables 1X , 2X , , nX ; 35
jbaseX = the baseline condition for variable jX ; and, 36

Wu and Lord 6
j jbase
jX XI X
= indicator function for variable
jX . It equals to zero if variable jX of 1
the segment is equal to the baseline condition, otherwise 1.0. 2
The indicator functions made the adjustment factor to be working or not based on specific 3
conditions of the segment and the presumed dependence relationships between variables. 4
To simplify the analysis, only two variables, lane width and shoulder width, were 5
considered in this study. And each variable in the dataset was assigned one of two values: the 6
baseline and improved, respectively. For lane width, it was either 12 ft (baseline) or 13 ft (wider 7
lane). And for shoulder width, it was either 6 ft (baseline) or 7 ft (wider shoulder). This way, the 8
total segments could be classified into four categories: (1) baseline; (2) wider lane; (3) wider 9
shoulder; and (4) wider lane and wider shoulder. They are described in TABLE 1. 10
The CMF for lane width was assumed to be CMFLW with baseline equal to 12 ft. So, the 11
specific CMFs for lane widths of 12 ft and 13 ft were 1.0 and CMFLW, respectively. Similarly, 12
the CMF for shoulder width was assumed to be CMFSW with baseline equal to 6 ft. The specific 13
CMFs for shoulder widths of 6 ft and 7 ft were 1.0 and CMFSW, respectively. We assumed 14
neither CMFLW nor CMFSW equaled to 1.0. Furthermore, the adjustment factor was used to 15
capture the dependence of the safety effects of the two variables. That is to say, if a segment was 16
wider in both lane and shoulder, the combined CMF was multiplied by the adjustment factor. 17
The CMFs for lane width, shoulder width and combined CMFs for the four groups of segments 18
are shown in the last three columns of TABLE 1. 19
TABLE 1 Summary of Four Groups of Segments 20
Group LW
(ft)
SW
(ft)
CMF for
LW
CMF for
SW Combined CMF
Baseline 12 6 1.0 1.0 1.0
Wider Lane 13 6 CMFLW 1.0 CMFLW
Wider Shoulder 12 7 1.0 CMFSW CMFSW
Wider Lane and
Wider Shoulder 13 7 CMFLW CMFSW CMFLW CMFSW AF
Note: LW - lane width; SW - shoulder width. 21
22
Specifically, the assumed CMF for lane width (i.e., CMFLW) varied between 0.8 and 0.9. 23
And that for shoulder width (i.e., CMFSW) varied between 0.85 and 0.9. The adjustment factor 24
changed from 0.80, 0.90, 0.95, 1.05, 1.10 to 1.20. When the adjustment factor is less than 1.0, it 25
means widening both lane and shoulder width simultaneously will bring more safety benefits 26
than the “sum” of the two single treatments. The smaller the adjustment factor is, the more 27
benefit will be. In contrast, if it is more than 1.0, taking the two treatments simultaneously will 28
have a lower effect than their “sum”. The higher the adjustment factor is, the lower the combined 29
safety effect will be. In total, there were 24 scenarios in this study, shown in TABLE 2. The 30
inverse dispersion parameter (Phi) varied between 0.5, 1.0 and 2.0 in each scenario to reflect 31
different traffic characteristics. 32

Wu and Lord 7
TABLE 2 Summary of Scenarios 1
Scenario CMF for LW CMF for SW AF
1 0.8 0.85 0.80
2 0.8 0.85 0.90
3 0.8 0.85 0.95
4 0.8 0.85 1.05
5 0.8 0.85 1.10
6 0.8 0.85 1.20
7 0.8 0.9 0.80
8 0.8 0.9 0.90
9 0.8 0.9 0.95
10 0.8 0.9 1.05
11 0.8 0.9 1.10
12 0.8 0.9 1.20
13 0.9 0.85 0.80
14 0.9 0.85 0.90
15 0.9 0.85 0.95
16 0.9 0.85 1.05
17 0.9 0.85 1.10
18 0.9 0.85 1.20
19 0.9 0.9 0.80
20 0.9 0.9 0.90
21 0.9 0.9 0.95
22 0.9 0.9 1.05
23 0.9 0.9 1.10
24 0.9 0.9 1.20
Note: LW - lane width; SW - shoulder width. 2
3
The theoretical function of the generated crash counts in this study is shown in 4
Equation 4. 5
4
, , , ,2.67 10true i spf i comb i i i comb iN N CMF L AADT CMF (4) 6
Where, 7
,true iN = true crash mean for roadway segment i during a certain time period (i.e., one 8
year). The true crash mean was the theoretical number of crashes that may occur on a segment 9
during the period. This number was used to generate random crash counts; 10
iAADT = average annual daily traffic volume (AADT) of segment i (vehicles per day); 11
iL = length of segment i (mile); and, 12
,comb iCMF = the combined CMF for lane width and shoulder width of segment i . It was 13
calculated by the methods shown in TABLE 1 (the last column). 14

Wu and Lord 8
The CMFs for the two variables were derived from SPFs with similar procedures utilized 1
in the previous study (16). The considered functional form is shown in Equation 5, in which the 2
two variables (i.e., lane width and shoulder width) were assumed to influence crashes 3
independently. 4
1
0 2 3( ) ( )i i i iE L AADT exp LW SW (5) 5
Where, 6
( )iE = the estimated crash mean during a period (i.e., one year) for segment i ; 7
iLW = lane width of segment i (ft); 8
iSW = shoulder width of segment i (ft); and 9
0 1 2 3, , , = coefficients to be estimated. 10
The two coefficients for lane width and shoulder width (i.e., 2 and 3 in Equation 5) 11
were used to estimate the CMFs for the two variables, respectively. This study used two indexes, 12
estimation bias and error percentage, to evaluate the CMFs derived from SPFs. Actually, they 13
were the same as those in the previous study (16), and are reproduced here as Equations 6 and 7. 14
The higher the error percentage is, the less accurate the CMFs derived from SPFs are. 15
_ _=j j Assumed j SPFCMF CMF (6) 16
_
100j
j
j Assumed
eCMF
(7) 17
Where, 18
j = estimation bias of CMF for variable j ; 19
je = error percentage of CMF for variable j , (%); 20
_j AssumedCMF = assumed CMF value for variable j ; and 21
_j SPFCMF = CMF derived from the SPF for variable j . 22
The same goodness-of-fit (GOF) and prediction measures for the models were used in 23
this study: (1) Akaike information criterion (AIC), (2) Mean absolute deviance (MAD), and 24
(3) Mean-squared predictive error (MSPE). For detailed information about MAD and MSPE, 25
readers are referred to (26). 26
DATA DESCRIPTION 27
This study utilized the same roadway segments as those in the previous study (16). The segment 28
length and AADT were observed real data, while the two variables, lane width and shoulder 29
width, were generated from discrete uniform distributions, respectively. In total, there were 30
1,492 segments. TABLE 3 provides the summary statistics of the highway segments used in this 31
study. Since both lane width and shoulder width had a discrete uniform distribution with two 32

Wu and Lord 9
numbers, and they were independently generated, the four types of segment groups were equally 1
distributed among all the segments. Each accounted for approximately 25%. 2
3
TABLE 3 Summary Statistics of Highway Segments 4
Variable Sample Size Min. Max Mean (SD)
Length (mile) 1492 0.1 6.3 0.55 (0.67)
AADT 1492 502 24800 6643.9 (3996.4)
Lane Width (ft) 1492 12 13 12.5 (0.50)
Shoulder Width (ft) 1492 6 7 6.5 (0.50)
Note: SD - standard deviation. 5
6
RESULTS 7
The CMFs for the two variables and other modeling results of each scenario with an inverse 8
dispersion parameter equal to 0.5 are documented in TABLE 4. The results with other inverse 9
dispersion parameters are not presented in this paper due to the space limitation. When compared 10
with the previous study (16), the bias and error percentage were relatively high in this study. The 11
average error percentage was around 5.3% for CMFs of both lane width and shoulder width. The 12
maximum was about 10%. When the adjustment factor was less than 1.0, the CMFs for both lane 13
width and shoulder width were consistently underestimated. For example, the true CMFs for lane 14
width and shoulder width were 0.8 and 0.85, respectively, in Scenario 1 (adjustment factor 15
equaled to 0.80). Those derived from regression models were 0.73 and 0.77, respectively. Safety 16
analysts may misleadingly overestimate the safety benefits of widening the lane and that of 17
widening the shoulder. The results were contrary when the adjustment factor was more than 1.0. 18
CMFs were overestimated and benefits of widening lane or shoulder individually were both 19
underestimated. So, neither the CMFs for lane width nor those for shoulder width can reflect 20
their true individual safety effectiveness in this scenario. 21
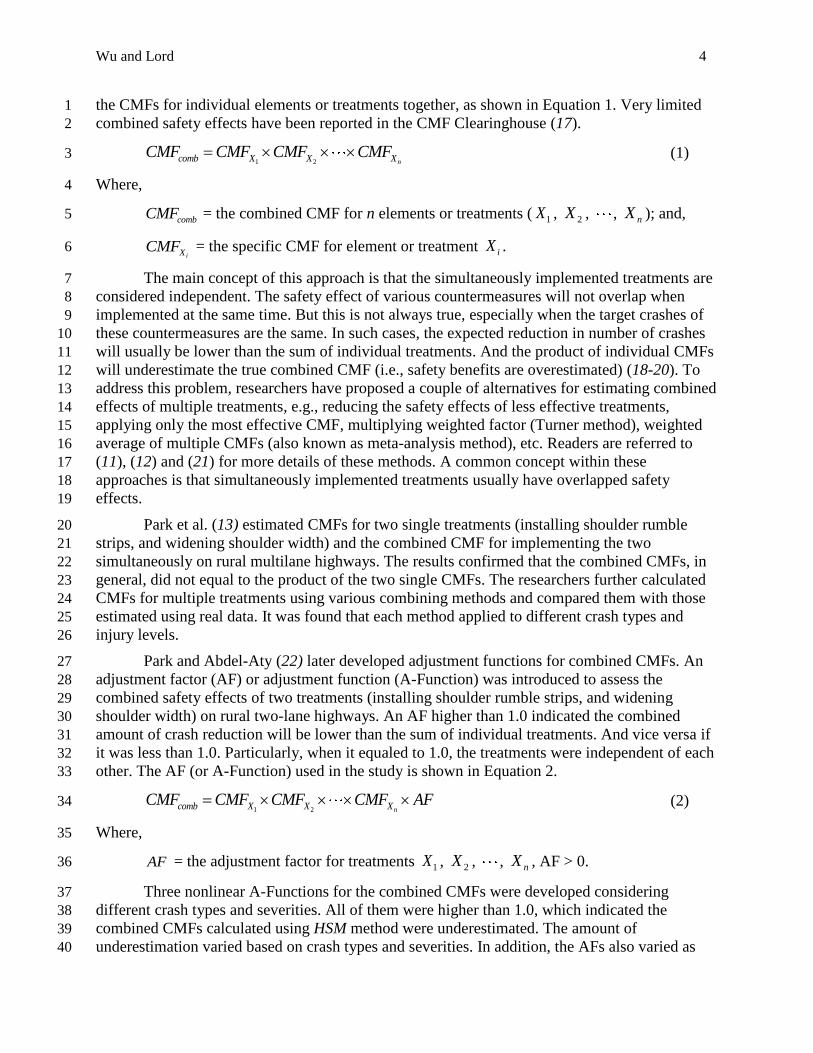
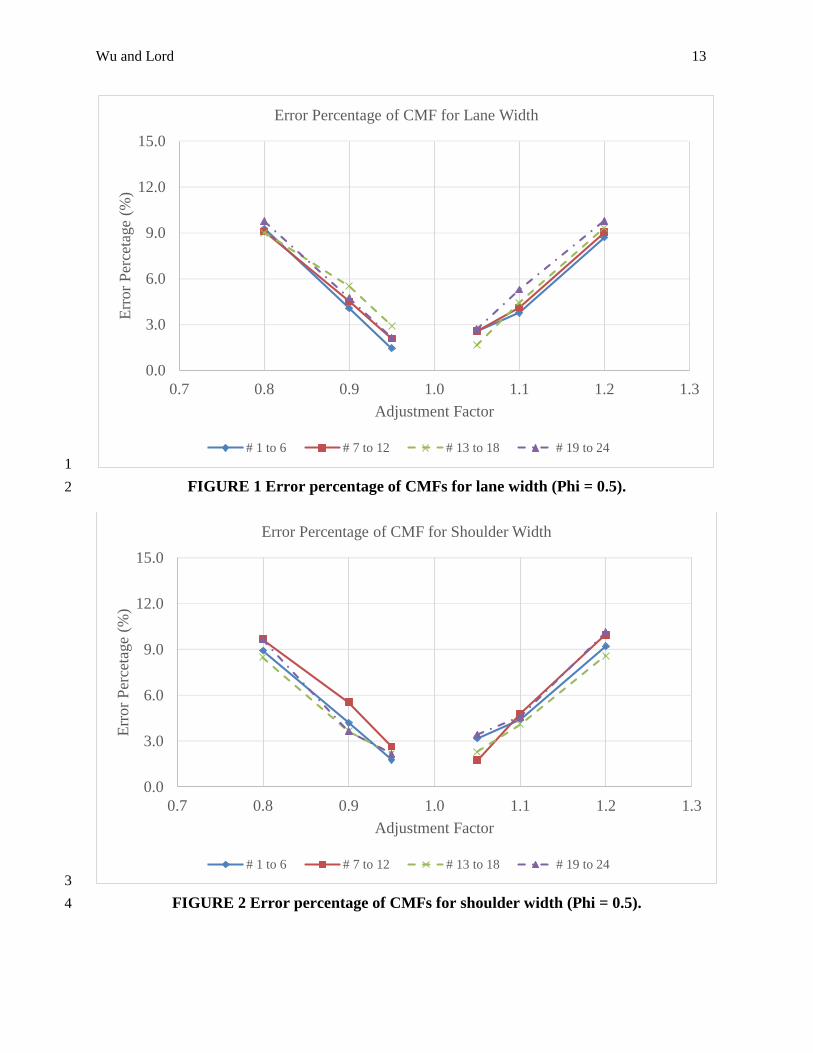
Further, the relationship between the accuracy of CMFs and the presumed adjustment 22
factors were investigated. The relationship between error percentage and adjustment factor are 23
illustrated in FIGURES 1 and 2. FIGURE 1 shows the error percentage of CMFs for lane width 24
and FIGURE 2 shows that for shoulder width. The two figures clearly indicate that the error 25
percentage was highly related to the adjustment factor. The error percentage was consistently the 26
highest when the adjustment factor was 0.80 or 1.20. And the lowest when it was 0.95 or 1.05. 27
The error percentage became small as the adjustment factor became closer to 1.0. A special case 28
can be seen when the adjustment factor equaled to 1.0, the scenario configuration fell into that in 29
Scenario II (with two variables) of the previous study (16). The error percentage should be much 30
lower (close to zero) based on the findings in that study. So the adjustment factor considerably 31
influenced the CMFs for both lane width and shoulder width. When it was close to 1.0, this 32
influence might be minor. But when it became far from 1.0 (i.e., less than or more than 1.0), the 33
accuracy of CMFs can be significantly affected. The further away it is from 1.0, the lower is the 34
quality of the CMFs. In other words, the CMFs were biased when the multiple treatments were 35
actually not affecting crash risk independently. The rate at which the value became biased was 36
actually very high when the adjustment factor went away from 1.0. 37

Wu and Lord 10
The row of “Phi” in TABLE 4 lists the estimated inverse dispersion parameters from the 1
regression models for each scenario. All of them were very close to the corresponding true 2
values regardless of the assumed CMFs for variables. No significant influence of the adjustment 3
factor on the estimate of inverse dispersion parameters was found in this study. Similar results 4
were observed for other inverse dispersion parameters. 5
6

Wu and Lord 11
TABLE 4 Results of CMFs for Lane Width and Shoulder Width (Phi = 0.5)
# AF a
LW b SW b
Phi b AIC d MAD e MSPE f Theo
SPF
(SD) Bias E Theo
SPF
(SD) Bias E
1 0.80 0.8 0.73
(0.048) -0.07 9.26 0.85
0.77
(0.046) -0.08 8.92 0.49 8750.40 0.052 0.014
2 0.90 0.8 0.77
(0.047) -0.03 4.06 0.85
0.81
(0.048) -0.04 4.19 0.50 8908.33 0.043 0.012
3 0.95 0.8 0.79
(0.049) -0.01 1.46 0.85
0.83
(0.046) -0.02 1.77 0.49 8917.64 0.040 0.010
4 1.05 0.8 0.82
(0.05) 0.02 2.57 0.85
0.88
(0.05) 0.03 3.17 0.50 9056.37 0.039 0.010
5 1.10 0.8 0.83
(0.054) 0.03 3.77 0.85
0.89
(0.054) 0.04 4.44 0.49 9106.98 0.044 0.012
6 1.20 0.8 0.87
(0.047) 0.07 8.72 0.85
0.93
(0.052) 0.08 9.20 0.50 9200.09 0.051 0.014
7 0.80 0.9 0.82
(0.043) -0.08 9.08 0.85
0.77
(0.049) -0.08 9.68 0.50 9046.82 0.055 0.016
8 0.90 0.9 0.86
(0.046) -0.04 4.50 0.85
0.8
(0.044) -0.05 5.55 0.49 9162.17 0.043 0.011
9 0.95 0.9 0.88
(0.049) -0.02 2.08 0.85
0.83
(0.048) -0.02 2.64 0.50 9223.60 0.042 0.011
10 1.05 0.9 0.92
(0.045) 0.02 2.57 0.85
0.86
(0.045) 0.01 1.76 0.49 9307.60 0.040 0.009
11 1.10 0.9 0.94
(0.055) 0.04 4.11 0.85
0.89
(0.049) 0.04 4.80 0.50 9366.01 0.043 0.010
12 1.20 0.9 0.98
(0.06) 0.08 9.04 0.85
0.93
(0.05) 0.08 9.95 0.50 9451.37 0.054 0.015
13 0.80 0.8 0.73
(0.035) -0.07 9.00 0.9
0.82
(0.047) -0.08 8.48 0.49 8927.76 0.054 0.016
14 0.90 0.8 0.76
(0.046) -0.04 5.51 0.9
0.87
(0.047) -0.03 3.66 0.50 9003.28 0.042 0.011

Wu and Lord 12
Table 4 Continued
# AF a
LW b SW b
Phi b AIC d MAD e MSPE f Theo
SPF
(SD) Bias E Theo
SPF
(SD) Bias E
15 0.95 0.8 0.78
(0.04) -0.02 2.92 0.9
0.88
(0.047) -0.02 2.19 0.49 9072.50 0.038 0.009
16 1.05 0.8 0.81
(0.045) 0.01 1.65 0.9
0.92
(0.055) 0.02 2.31 0.49 9184.27 0.041 0.009
17 1.10 0.8 0.84
(0.046) 0.04 4.45 0.9
0.94
(0.051) 0.04 4.11 0.49 9232.53 0.041 0.009
18 1.20 0.8 0.87
(0.057) 0.07 9.33 0.9
0.98
(0.054) 0.08 8.58 0.49 9330.62 0.053 0.014
19 0.80 0.9 0.81
(0.05) -0.09 9.75 0.9
0.81
(0.048) -0.09 9.64 0.51 9155.48 0.058 0.018
20 0.90 0.9 0.86
(0.044) -0.04 4.74 0.9
0.87
(0.047) -0.03 3.64 0.50 9287.17 0.044 0.011
21 0.95 0.9 0.88
(0.047) -0.02 2.13 0.9
0.88
(0.053) -0.02 2.18 0.50 9358.16 0.042 0.010
22 1.05 0.9 0.92
(0.058) 0.02 2.70 0.9
0.93
(0.055) 0.03 3.43 0.51 9447.52 0.044 0.012
23 1.10 0.9 0.95
(0.049) 0.05 5.29 0.9
0.94
(0.053) 0.04 4.60 0.49 9490.10 0.044 0.011
24 1.20 0.9 0.99
(0.061) 0.09 9.80 0.9
0.99
(0.054) 0.09 10.12 0.50 9627.21 0.056 0.016
Note: # - scenario number; a – AF is the assumed adjustment factor; b – LW is for lane width, SW is for shoulder width, Theo means
the true CMF value, SPF is the mean of CMFs from 100 experiments, SD is the standard deviation of the 100 CMFs, E is error
percentage (%); c - the mean of inverse dispersion parameter estimated from 100 experiments; d, e, f – each is the mean of the
corresponding GOF of the 100 results.
Wu and Lord 13
1
FIGURE 1 Error percentage of CMFs for lane width (Phi = 0.5). 2
3
FIGURE 2 Error percentage of CMFs for shoulder width (Phi = 0.5). 4
0.0
3.0
6.0
9.0
12.0
15.0
0.7 0.8 0.9 1.0 1.1 1.2 1.3
Err
or
Per
ceta
ge
(%)
Adjustment Factor
Error Percentage of CMF for Lane Width
# 1 to 6 # 7 to 12 # 13 to 18 # 19 to 24
0.0
3.0
6.0
9.0
12.0
15.0
0.7 0.8 0.9 1.0 1.1 1.2 1.3
Err
or
Per
ceta
ge
(%)
Adjustment Factor
Error Percentage of CMF for Shoulder Width
# 1 to 6 # 7 to 12 # 13 to 18 # 19 to 24

Wu and Lord 14
Another interesting finding from this study was the GOF measurements. Both MAE and 1
MSPE were relatively small in each scenario, and they were very close to those in the previous 2
study (16). This indicated that the predicated crash number was quite close to the true crash 3
mean. However, this did not guarantee the quality of CMFs derived from regression models, as 4
has been described above. That is to say, although the fitting result seems to be good in terms of 5
GOF measurements, there can still be some substance issues with the models. A possible reason 6
is that some parameters may have been overestimated (or underestimated) while others may have 7
been underestimated (or overestimated) in the regression models. Take Scenario 1 as an 8
example. The specific theoretical function for generating crash counts is shown in Equation 8. 9
12 612 64
, 2.67 10 0.8 0.85i iLW SWi ii i
I LW I SWLW SW
true i i iN L AADT AF (8a) 10
Or equivalently, 11
12 6
, 0.103 0.16( 0.22 )i iLW SWi iI LW I SW
itrue i i i iAF SWN L AADT exp LW (8b) 12
Where, 13
12iiLW
I LW
= indicator function for lane width of segment i. It equals to 0 if the lane 14
width is 12 ft, otherwise 1.0, and, 15
6iiSW
I SW
= indicator function for shoulder width of segment i. It equals to 0 if the 16
shoulder width is 6 ft, otherwise 1.0. 17
The modeling output of one experiment in this scenario is shown in TABLE 5. It can be 18
seen that the coefficients for lane width and shoulder width were both obviously underestimated. 19
And that for AADT was slightly underestimated. But the intercept coefficient was overestimated. 20
Note that the specific theoretical value for the intercept is not directly given in TABLE 5 due to 21
the fact that it depends on the two indicator functions. In other words, the theoretical intercept 22
varied when the segment group changed. For segment Groups 1, 2 and 3, it was -2.27 (logarithm 23
of 0.103). But it was -2.49 (logarithm of the product of 0.103 and AF, 0.8) for segment Group 4. 24
The coefficient estimated from regression models was much higher than either of them. In this 25
experiment, the coefficients for lane width and shoulder width were both underestimated. It 26
seems the underestimation was compensated through overestimating the intercept coefficient. 27
Perhaps this explains the overall smaller MAE and MSPE values. 28

Wu and Lord 15
TABLE 5 Modeling Output of the an Experiment in Scenario 1 (Phi=0.5, NB Model) 1
Model Variable Theo. Value a Coef. Value b SE c p-Value
Intercept [ 0( )ln ] -2.27-0.223ILWISW d -1.810 0.713 0.0111
Ln(AADT) ( 1 ) 1.00 0.981 0.040 < 2e-16
Lane Width ( 2 ), ft -0.223 -0.352 0.045 3.26E-15
Shoulder Width ( 3 ), ft -0.162 -0.321 0.045 6.18E-13
AIC 8921.8
MAD 0.050
MSPE 0.014
a – theoretical value; b – estimated coefficient value; c – SE is standard error; 2
d –The theoretical value for intercept was calculated by taking the nature logarithm of the first 3
two terms of Equation 8b, 12 60.103i iLW SWi i
I LW I SWAF . ILW and ISW are the two indicator 4
functions of lane width and shoulder width, respectively. 5
6
CONCLUSIONS AND DISCUSSIONS 7
This paper has documented an extensive study on the validation of developing CMFs using 8
cross-sectional studies, particularly focusing on the independence assumption (i.e., variables 9
were influencing crashes independently) with the most commonly used regression models. The 10
main objective was to examine the accuracy of CMFs estimated from regression models when 11
the independence assumption cannot be satisfied. Two variables, lane width and shoulder width, 12
were considered in this study. And an adjustment factor was used to capture the dependence 13
between the two. An adjustment factor higher than 1.0 represents widening the two at the same 14
time will reduce fewer crashes than the sum of the individuals. And vice versa if the factor is 15
lower than 1.0. Various safety effects and adjustment factors for the two variables were assumed 16
and the accuracy of CMFs were evaluated using similar approach in the authors’ previous study 17
(16). The main conclusions are summarized as follows: (1) the commonly used regression 18
models can produce biased CMFs if the considered variables influence crashes dependently; 19
(2) the bias is highly correlated with the adjustment factor (i.e., degree of the dependence of 20
variables). When the factor is close to 1.0, indicating the dependence is weak, the bias of CMFs 21
derived using regression models is relatively small, and the CMFs may still be acceptable. 22
However, higher or lower adjustment factor reduces the quality of CMFs significantly; and 23
(3) the coefficients for both treatments of interests and other variables may be over- and/or 24
underestimated under the conditions of dependent variables. The dependence relationship may be 25
absorbed into the estimates of coefficients for other variables. In one example of this study, the 26
estimated intercept coefficient was overestimated, while the coefficients for the two variables 27
were underestimated. 28
The findings in this study raised cautions to safety analysts while developing CMFs or 29
modeling crashes with multiple variables. It is recommended to examine the dependence of 30
variables. If they potentially have significant overlap in reducing crashes (i.e., the independent 31
assumption is not matched), the CMFs for individual variables derived from the SPFs are much 32

Wu and Lord 16
likely to be biased. One may ask how to examine whether two countermeasures are independent 1
or not when dealing with real crash data. Admittedly, it is not easy to conclude whether or how 2
much two or more safety treatments are dependent of each other with limited studies on the 3
safety effects of multiple treatments. Therefore, more analyses on the combined safety effects are 4
needed in the future. Before enough solid theoretical supports are available, engineering 5
judgment and experiences may need to be considered. 6
There are a few limitations with this study. First, several aspects can influence the 7
modeling result and hence the CMFs, such as the functional form and the error distribution of the 8
statistical model, sample size, etc. (4; 16; 27-30). This study only considered the most frequently 9
used one, the NB model with a linear relationship between variables, and the sample size was 10
assumed to be large enough. Second, only two variables were used and such models may be 11
influenced by the omitted-variable bias in practice. In addition, their correlation was not 12
considered, which could potentially influence the results (31). To estimate reliable CMFs, these 13
questions need further consideration when dealing with real observed data. Finally, this study 14
only raised the problem that might affect the quality of CMFs derived using regression models. 15
Safety practitioners may be more interested in solutions to this problem. So, more sophisticated 16
approaches that can assess the overlap effects of multiple treatments need to be developed in the 17
future. 18
19
REFERENCES 20
[1] Richard, K. R., and R. Srinivasan. Separation of Safety Effects of Multiple Improvements by 21
Alternate Empirical Bayes Methods. Transportation Research Record: Journal of the 22
Transportation Research Board, No. 2236, 2011, pp. 27-40. 23
[2] Carter, D., R. Srinivasan, F. Gross, and F. Council. Recommended Protocols for Developing 24
Crash Modification Factors. http://www.cmfclearinghouse.org/collateral/CMF_Protocols.pdf. 25
Accessed June 26, 2014. 26
[3] Hauer, E. Trustworthiness of Safety Performance Functions.In the 93rd Annual Meeting of 27
the Transportation Research Board (TRB), Transportation Research Board, Washington, D.C., 28
2014. 29
[4] Lord, D., and F. Mannering. The Statistical Analysis of Crash-Frequency Data: A Review 30
and Assessment of Methodological Alternatives. Transportation Research Part A, Vol. 44, No. 31
5, 2010, pp. 291-305. 32
[5] Hauer, E. Cause and Effect in Observational Cross-Section Studies on Road Safety.In the 33
84th Annual Meeting of the Transportation Research Board (TRB), Transportation Research 34
Record, Washington D.C., 2005. 35
[6] Hauer, E. Cause, Effect and Regression in Road Safety: A Case Study. Accident Analysis & 36
Prevention, Vol. 42, No. 4, 2010, pp. 1128-1135. 37
[7] Hauer, E. The Art of Regression Modeling in Road Safety. Springer, 2015. 38

Wu and Lord 17
[8] Hauer, E. Fishing for Safety Information in Murky Waters. Journal of Transportation 1
Engineering, Vol. 131, No. 5, 2005, pp. 340-344. 2
[9] Davis, G. A. Accident Reduction Factors and Causal Inference in Traffic Safety Studies: A 3
Review. Accident Analysis & Prevention, Vol. 32, No. 1, 2000, pp. 95-109. 4
[10] AASHTO. Highway Safety Manual. American Association of State Highway and 5
Transportation Officials, Washington, D.C., 2010. 6
[11] Gross, F., A. Hamidi, and K. Yunk. Issues Related to the Combination of Multiple Cmfs. 7
Presented at the 91st Annual Meeting of the Transportation Research Board, Washington D.C., 8
2012. 9
[12] Elvik, R. An Exploratory Analysis of Models for Estimating the Combined Effects of Road 10
Safety Measures. Accident Analysis & Prevention, Vol. 41, No. 4, 2009, pp. 876-880. 11
[13] Park, J., M. Abdel-Aty, and C. Lee. Exploration and Comparison of Crash Modification 12
Factors for Multiple Treatments on Rural Multilane Roadways. Accident Analysis & Prevention, 13
Vol. 70, 2014, pp. 167-177. 14
[14] Park, J., M. Abdel-Aty, J. Lee, and C. Lee. Developing Crash Modification Functions to 15
Assess Safety Effects of Adding Bike Lanes for Urban Arterials with Different Roadway and 16
Socio-Economic Characteristics. Accident Analysis & Prevention, Vol. 74, 2015, pp. 179-191. 17
[15] Park, J., and M. Abdel-Aty. Assessing the Safety Effects of Multiple Roadside Treatments 18
Using Parametric and Nonparametric Approaches. Accident Analysis & Prevention, Vol. 83, 19
2015, pp. 203-213. 20
[16] Wu, L., D. Lord, and Y. Zou. Validation of Crash Modification Factors Derived from Cross-21
Sectional Studies Using Regression Models. Presented at the 94th Annual Meeting of the 22
Transportation Research Board (TRB), Washington D.C., 2015. 23
[17] CMFClearinghouse. Installation of Fixed Combined Speed and Red Light Cameras. 24
http://www.cmfclearinghouse.org/study_detail.cfm?stid=401. Accessed July 23, 2015. 25
[18] Harkey, D. L., R. Srinivasan, J. Baek, F. M. Council, K. Eccles, N. Lefler, F. Gross, B. 26
Persaud, C. Lyon, E. Hauer, and J. A. Bonneson. Accident Modification Factors for Traffic 27
Engineering and Its Improvements. Washington, D.C. : Transportation Research Board, 28
Washington, D.C., 2008. 29
[19] Bonneson, J., and D. Lord. Role and Application of Accident Modification Factors in the 30
Highway Design Process. Report FHWA/TX-05/0-4703-2, Texas Tranportation Institute, 31
College Station, TX, 2005. 32
[20] Roberts, P., and B. Turner. Estimating the Crash Reduction Factor from Multiple Road 33
Engineering Countermeasures. Presented at 3rd International Road Safety Conference, Perth, 34
Australia, 2007. 35

Wu and Lord 18
[21] Gross, F., and A. Hamidi. Investigation of Existing and Alternative Methods for Combining 1
Multiple Cmfs. 2
http://www.cmfclearinghouse.org/collateral/Combining_Multiple_CMFs_Final.pdf. Accessed 3
July 14, 2015, 2015. 4
[22] Park, J., and M. Abdel-Aty. Development of Adjustment Functions to Assess Combined 5
Safety Effects of Multiple Treatments on Rural Two-Lane Roadways. Accident Analysis & 6
Prevention, Vol. 75, 2015, pp. 310-319. 7
[23] De Pauw, E., S. Daniels, T. Brijs, E. Hermans, and G. Wets. To Brake or to Accelerate? 8
Safety Effects of Combined Speed and Red Light Cameras. Journal of safety research, Vol. 50, 9
2014, pp. 59-65. 10
[24] Wang, X., T. Wang, A. Tarko, and P. J. Tremont. The Influence of Combined Alignments 11
on Lateral Acceleration on Mountainous Freeways: A Driving Simulator Study. Accident 12
Analysis & Prevention, Vol. 76, 2015, pp. 110-117. 13
[25] Bauer, K., and D. Harwood. Safety Effects of Horizontal Curve and Grade Combinations on 14
Rural Two-Lane Highways. Transportation Research Record: Journal of the Transportation 15
Research Board, No. 2398, 2013, pp. 37-49. 16
[26] Lord, D., S. D. Guikema, and S. R. Geedipally. Application of the Conway-Maxwell-17
Poisson Generalized Linear Model for Analyzing Motor Vehicle Crashes. Accident Analysis & 18
Prevention, Vol. 40, No. 3, 2008, pp. 1123-1134. 19
[27] Lord, D. Modeling Motor Vehicle Crashes Using Poisson-Gamma Models: Examining the 20
Effects of Low Sample Mean Values and Small Sample Size on the Estimation of the Fixed 21
Dispersion Parameter. Accident Analysis & Prevention, Vol. 38, No. 4, 2006, pp. 751-766. 22
[28] Lord, D., and L. F. Miranda-Moreno. Effects of Low Sample Mean Values and Small 23
Sample Size on the Estimation of the Fixed Dispersion Parameter of Poisson-Gamma Models for 24
Modeling Motor Vehicle Crashes: A Bayesian Perspective. Safety Science, Vol. 46, No. 5, 2008, 25
pp. 751-770. 26
[29] Wu, L., Y. Zou, and D. Lord. Comparison of Sichel and Negative Binomial Models in Hot 27
Spot Identification. Transportation Research Record: Journal of the Transportation Research 28
Board, No. 2460, 2014, pp. 107-116. 29
[30] Zou, Y., L. Wu, and D. Lord. Modeling over-Dispersed Crash Data with a Long Tail: 30
Examining the Accuracy of the Dispersion Parameter in Negative Binomial Models. Analytic 31
Methods in Accident Research, Vol. 5–6, 2015, pp. 1-16. 32
[31] Wu, L. Examining the Use of Regression Models for Developing Crash Modification 33
Factors.In the Zachry Department of Civil Engineering, Doctoral Dissertation, Texas A&M 34
University, College Station, TX, 2016. 35
36