introduction to intractability p, np, np-completeness how to approach intractable problems monday,...
TRANSCRIPT

1
Introduction to Intractability
P, NP, NP-completeness
How To Approach Intractable Problems
Monday, August 3rd

2
Outline For Today
1. Intractability: P, NP, NP-completeness
2. How to Approach Intractable Problems?

3
Outline For Today
1. Intractability: P, NP, NP-completeness
2. How to Approach Intractable Problems?

Focus of CS161
4
Practical Algorithms to Fundamental Problems
Almost-linear time super-fast algorithms
Sorting: O(nlogn)
Dijkstra: O(mlog(n))
MST: O(mlog(n))
Superlinear but still practical
Strassen’s Algorithm: O(n2.83)
Bellman-Ford: O(mn)
Floyd-Warshall: O(n3)
Karger, etc…
Sad Fact
5
Many other important problems seem
impossible to solve very efficiently.
Ex: TSP, Max-Cut
A critical skill that we all have to acquire is to
recognize such problems.

Formalizing Tractability: Class P
6
Given a computational problem C
P: C is ∈ P (polynomial-time solvable) if ∃an
algorithm solving C with O(nk) run-time, for some
constant k.
where n is the input length in bits
k is some constant, say, 1, 2, 5, 1M, etc.
Ex poly-times: O(n), O(nlog(n)), O(n3), O(n100000)
Ex: Almost all problems we have seen so far
except TSP, Independent Set, Max-Cut

Interpretation of P and Its Caveats
7
A rough test for **tractability**.
Caveat 1: n1000 is not tractable in practice
Caveat 2: Some intractable problems can actually be
solved in some restricted form efficiently
But generally speaking, has been
**extremely successful** in classifying
problems.

Example of Intractable Problem: TSP
8
TSP: Traveling Salesman Problem
Input: Complete graph G(V, E) with non-negative
edge costs
Output: Min-cost tour [cycle visiting each vertex
once]
D
CB
A2
14
3
5
6

Example of Intractable Problem: TSP
9
TSP: Traveling Salesman Problem
Input: Complete graph G(V, E) with non-negative
edge costs
Output: Min-cost tour [cycle visiting each vertex
once]
D
CB
A2
14
3
5
6
Answer: A->B->D->C->A
= 13
Conjecture from 1965 (Jack Edmonds)
10
We have been looking for a fast algorithm for
TSP for > 80 years, and no one has succeeded.
After 30 years or so in 1965, Jack Edmonds
made the following conjecture:
There is no poly-time algorithm for
TSP.
(equivalent to conjecture: P != NP)
To this day, no one has been able to
prove/disprove this conjecture.

Making a Case For TSP’s Intractability?
11
(So far) We have not been able to argue for
TSP’s intractability in an absolute sense.
Instead accumulate evidence of intractability
Idea From Early 1970s:
Instead show “relative” intractability
(i.e. show TSP is as hard as bunch of
other problems.)
Reductions
12
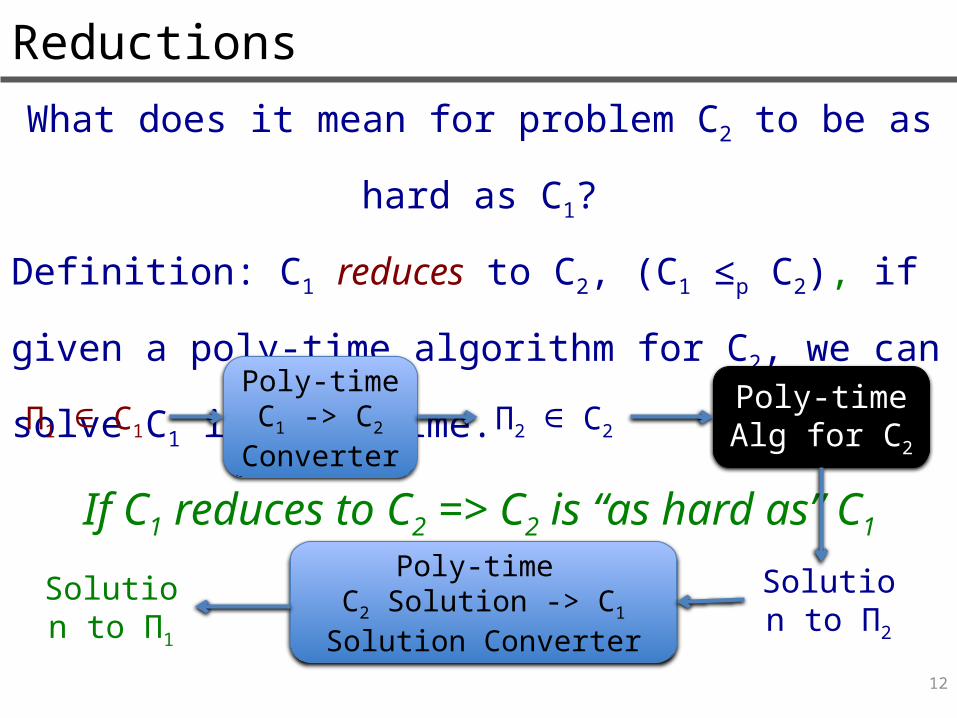
What does it mean for problem C2 to be as hard
as C1?
Definition: C1 reduces to C2, (C1 ≤p C2), if given a
poly-time algorithm for C2, we can solve C1 in
poly-time.
If C1 reduces to C2 => C2 is “as hard as”
C1
Poly-time Alg for C2
Π1 ∈ C1
Poly-time C1 -> C2
ConverterΠ2 ∈ C2
Solution to Π2
Poly-time C2 Solution -> C1
Solution Converter
Solution to Π1
High-level Idea of Reduction
13
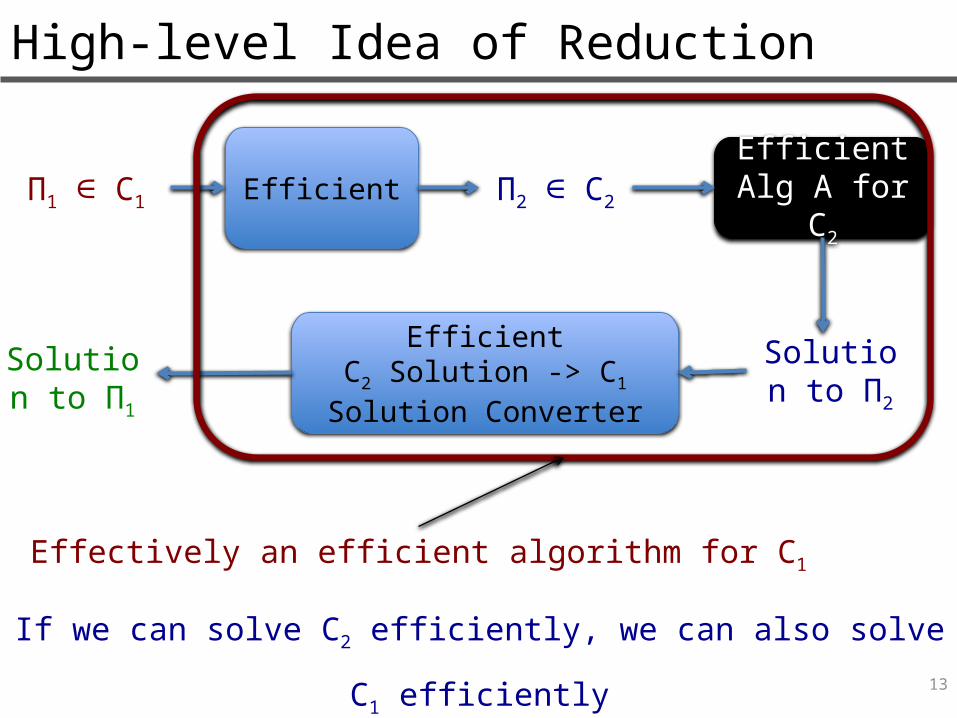
Efficient Alg A for C2
Π1 ∈ C1 Efficient Π2 ∈ C2
Solution to Π2
EfficientC2 Solution -> C1
Solution Converter
Solution to Π1
If we can solve C2 efficiently, we can also solve C1
efficiently
C2 as hard as C1
Effectively an efficient algorithm for C1

Reductions are Transitive
14
Claim: If C1 ≤p C2, and C2 ≤p C3, then C1 ≤p C3
Proof: We have to argue if we have a poly-time algorithm
for C3,
we can solve C1 efficiently. Or C3 is as hard as C1.
If we had a poly-time algorithm for C3
we could solve C2 in poly-time (since C2 ≤ C3)
we could solve C1 in poly-time (since C1 ≤ C2)
Q.E.D.

Contrapositive
15
Efficient Alg A for C2
Π1 ∈ C1 Efficient Π2 ∈ C2
Solution to Π2
EfficientC2 Solution -> C1
Solution Converter
Solution to Π1
Then if C1 ≤p C2, there cannot be an efficient algorithm A
for C2
Assume we knew NO efficient algorithm for C1 exists
X
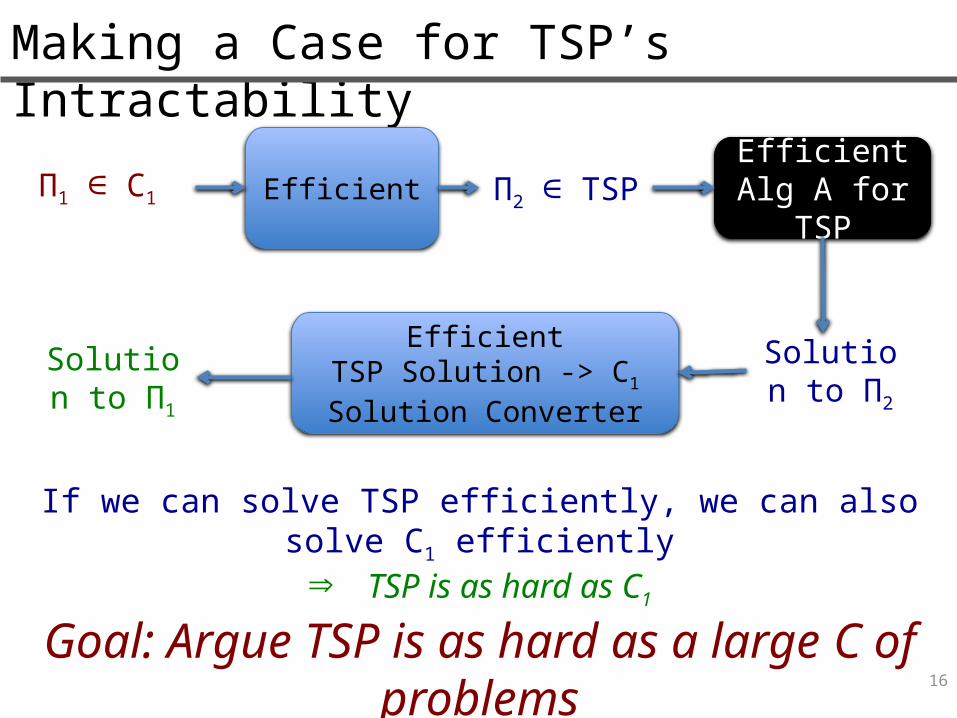
Making a Case for TSP’s Intractability
16
Efficient Alg A for
TSPΠ1 ∈ C1 Efficient Π2 ∈ TSP
Solution to Π2
EfficientTSP Solution -> C1 Solution Converter
Solution to Π1
If we can solve TSP efficiently, we can also solve C1 efficiently
TSP is as hard as C1
Goal: Argue TSP is as hard as a large C of problems
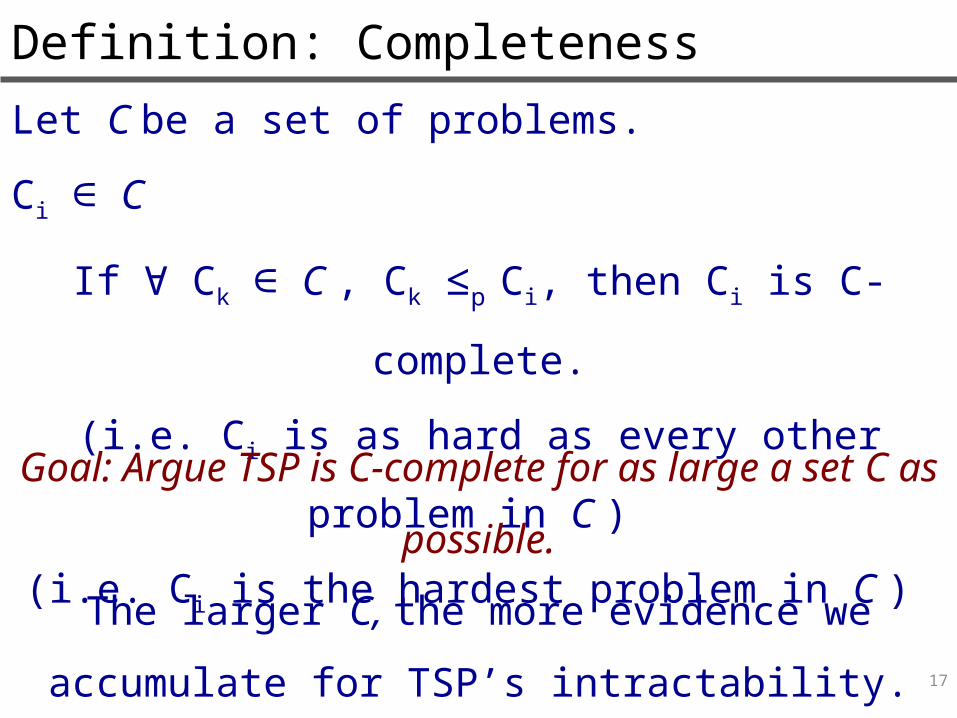
Definition: Completeness
17
Let C be a set of problems.
Ci ∈ C
If ∀ Ck ∈ C , Ck ≤p Ci, then Ci is C-complete.
(i.e. Ci is as hard as every other problem in C )
(i.e. Ci is the hardest problem in C ) Goal: Argue TSP is C-complete for as large a
set C as possible.
The larger C, the more evidence we
accumulate for TSP’s intractability.

Arguing TSP is C-complete for a large C
18
C
C1
TSP
C3
C4 C5
C6
Ck
C2

Picking an Appropriate COption 1: Let C be any problem
Q: Could we hope to prove that TSP is as hard
as any other computational problem?
A: No, there are problems, such as the Halting
Problem, which we know are simply not
solvable!
(i. e, do not have any algorithms solving them,
let alone an efficient one).
But TSP is solvable: if nothing, by brute-force
search. Exponential-time but solvable.

Option 2: C = NP: Brute-force Solvable Problems
Option 2: Let C be all brute-force solvable problems
Definition (NP or brute-force solvable problems):
A problem C ∈ NP if:
1. Correct solutions have polynomial length.
2. Claimed solutions are verifiable in poly-time.
***All that is required to be in NP is that we
can verify the solution to the problem
efficiently.***

Example NP problems Every problem we have seen in CS 161.
Every problem in P.
(Most-likely) Every problem you will ever see in
practice.
Ex: Decision version of TSP: ∃ T of size ≤ k?
1. Each tour T is a cycle of size n, so poly-length.
2. We can verify length of T in poly-time: just sum
each edge in T.

What is an NP-complete Problem?
22
NP
C1
C*: NP-complete
C3 C4C5
C6
Ck
C2
C* is as hard as any NP problem!

Solving an NP-complete Problem
23
NP
C1
C*: NP-complete
C3 C4C5
C6
Ck
C2
If we can solve C* efficiently, we can solve every
single
NP problem (basically all problems in practice)!!!

Do NP-complete Problems Exist?
24
YES! They’re Everywhere!
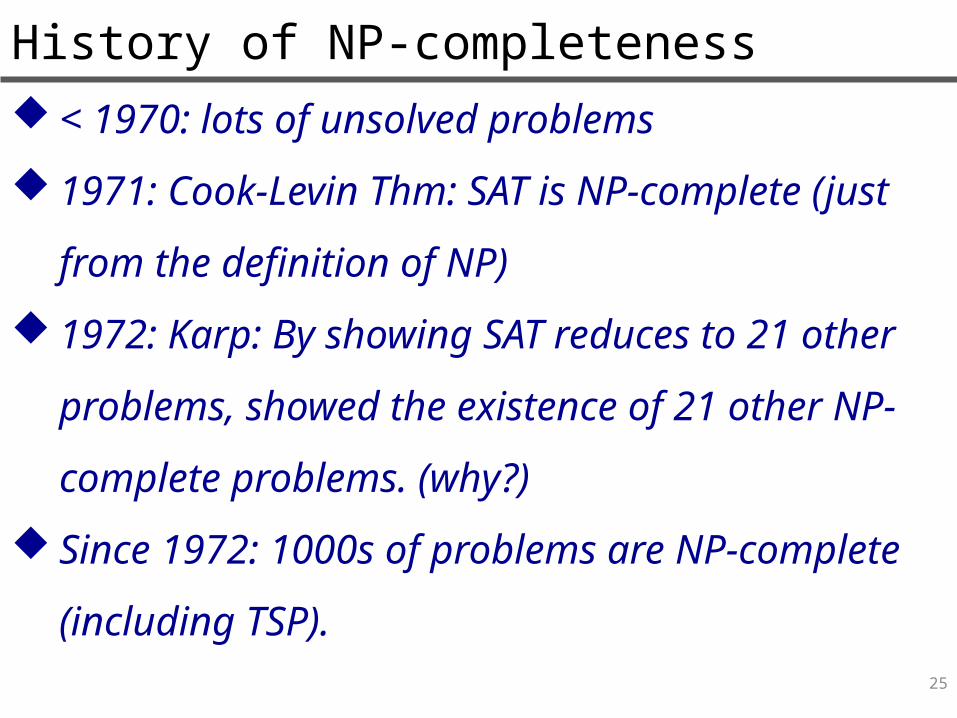
History of NP-completeness
25
< 1970: lots of unsolved problems
1971: Cook-Levin Thm: SAT is NP-complete
(just from the definition of NP)
1972: Karp: By showing SAT reduces to 21
other problems, showed the existence of 21
other NP-complete problems. (why?)
Since 1972: 1000s of problems are NP-
complete (including TSP).

History of NP-completeness
26
NP
C2
SAT
C3 C4C5
Ck
C6
C1
K1
K2… K20
K21
1971: Cook-Levin1972: Karp

History of NP-completeness
27
NP
C2
SAT
C3 C4C5
Ck
C6
C1
K1
K2… K20
K21
NP-complete
Since 1972

Reducing C* to C** => C** is NP-complete
28
NP
C2
C*: NP-complete
C3 C4C5
Ck
C6
C*
*
If we can solve C** efficiently => we solve C*
efficiently
=> we solve all NP problems efficiently
C** is NP-
complete!
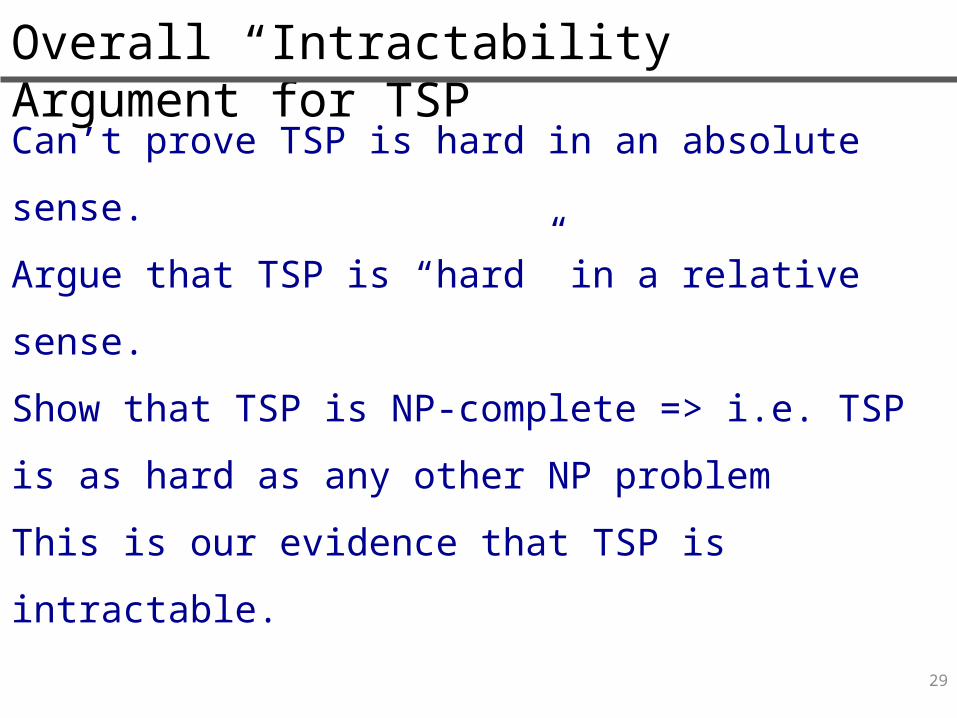
Overall “Intractability” Argument for TSP
29
Can’t prove TSP is hard in an absolute sense.
Argue that TSP is “hard” in a relative sense.
Show that TSP is NP-complete => i.e. TSP is as
hard as any other NP problem
This is our evidence that TSP is intractable.

Why is TSP NP-complete?
30
HAM-CYCLE Problem:
Input: Undirected Graph G(V, E)
Output: YES if G contain a Hamiltonian cycle/NO
o.w
Dfn: A Ham. Cycle is a simple cycle that contain
each vertex of the graph once.
Fact: Hamiltonian Cycle is NP-complete.
SAT≤p3-SAT≤pCLIQUE≤pVERTEX-COVER≤p
HAM-CYCLE

Hamiltonian Cycle Example (1)
31
F
CB
A
D
E
G

Hamiltonian Cycle Example
32
F
CB
A
D
E
G
Answer: YES.

Hamiltonian Cycle Example
33
F
CB
A
E

Hamiltonian Cycle Example
34
F
CB
A
E
Answer: NO. Any complete cycle has to visit A twice
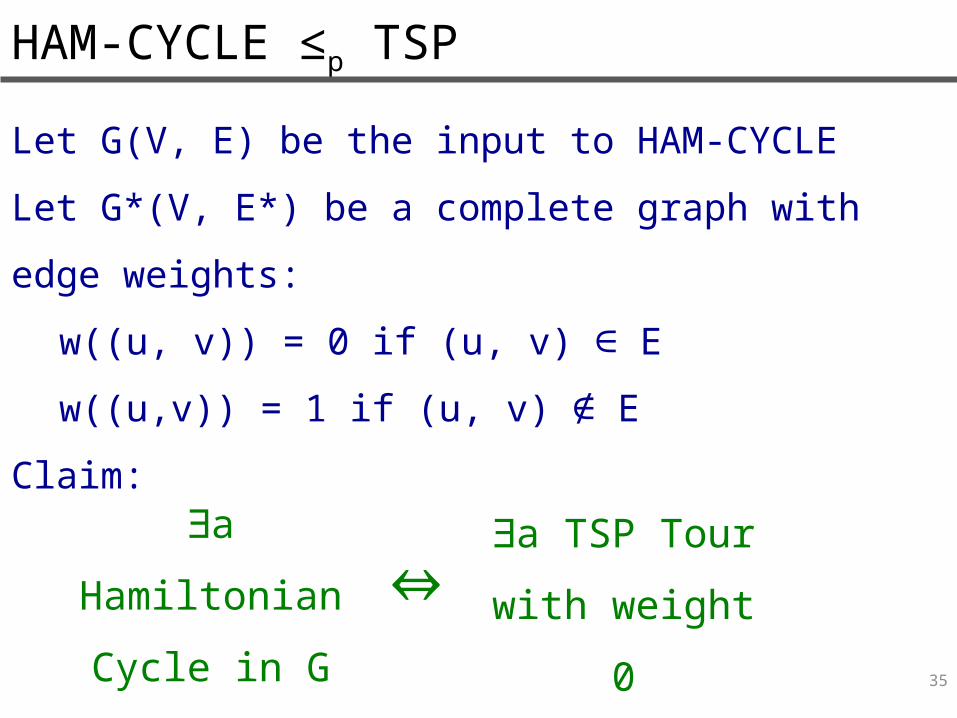
HAM-CYCLE ≤p TSP
35
Let G(V, E) be the input to HAM-CYCLE
Let G*(V, E*) be a complete graph with edge
weights:
w((u, v)) = 0 if (u, v) ∈ E
w((u,v)) = 1 if (u, v) ∉ E
Claim:∃a Hamiltonian
Cycle in G ⇔∃a TSP Tour
with weight 0
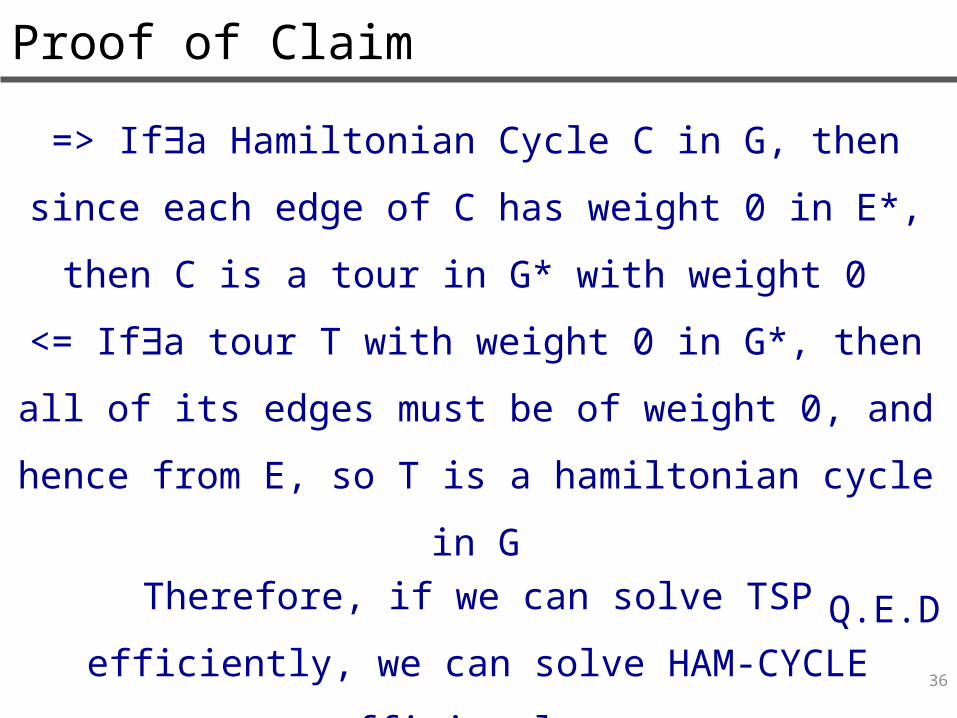
Proof of Claim
36
=> If∃a Hamiltonian Cycle C in G, then since
each edge of C has weight 0 in E*, then C is a
tour in G* with weight 0
<= If∃a tour T with weight 0 in G*, then all of its
edges must be of weight 0, and hence from E, so
T is a hamiltonian cycle in G
Q.E.DTherefore, if we can solve TSP efficiently, we can
solve HAM-CYCLE efficiently,
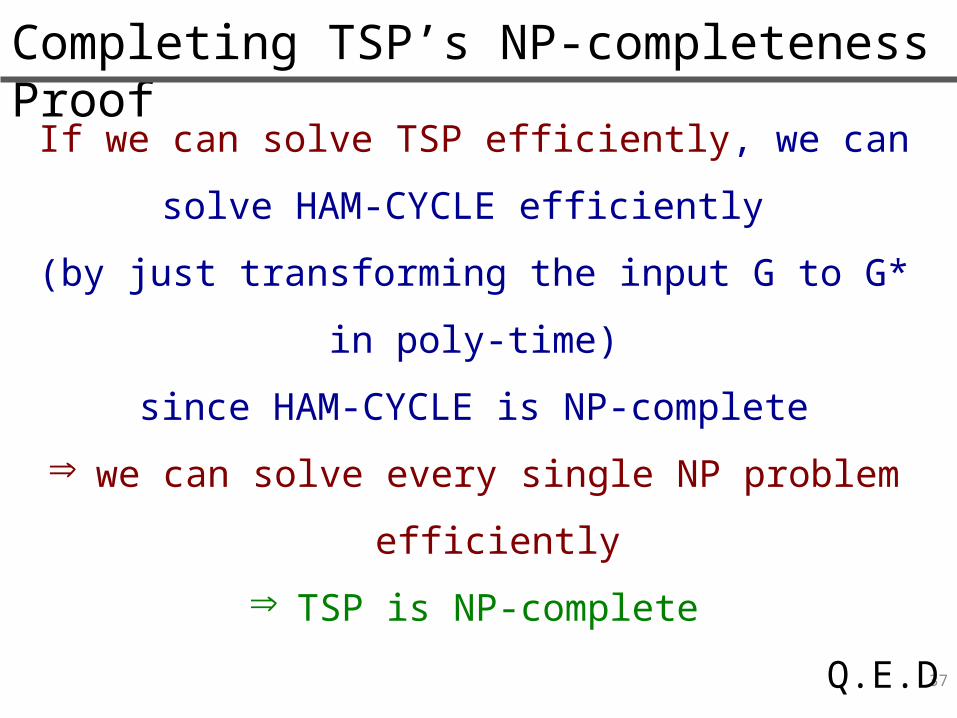
Completing TSP’s NP-completeness Proof
37
If we can solve TSP efficiently, we can solve HAM-
CYCLE efficiently
(by just transforming the input G to G* in poly-
time)
since HAM-CYCLE is NP-complete
we can solve every single NP problem
efficiently
TSP is NP-complete
Q.E.D

Does P = NP?
38
We know P ⊆ NP. Two possibilities:
NP
P
P=N
P
Is every problem, whose solutions are efficiently
verifiable, is also efficiently solvable?
We don’t know. But most people believe P ≠ NP.
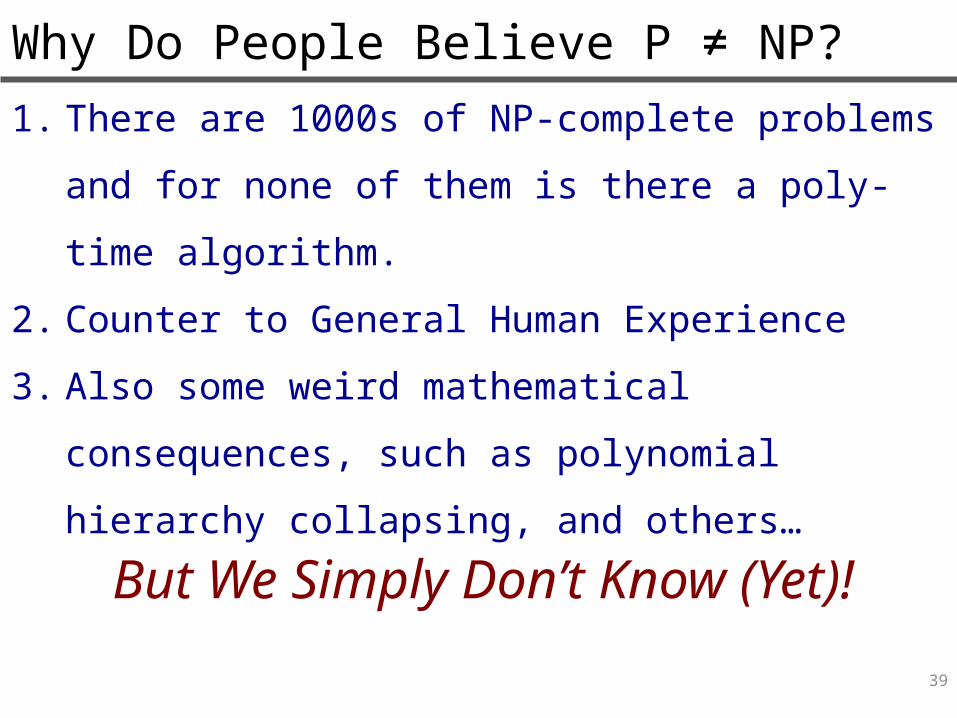
Why Do People Believe P ≠ NP?
39
1. There are 1000s of NP-complete problems and
for none of them is there a poly-time
algorithm.
2. Counter to General Human Experience
3. Also some weird mathematical consequences,
such as polynomial hierarchy collapsing, and
others…
But We Simply Don’t Know (Yet)!
40
Outline For Today
1. Intractability: P, NP, NP-completeness
2. How to Approach Intractable Problems?

Your Problem is NP-complete. Now What?
41
Option 1: Focus to special-case inputs.
Ex: Independent Set is NP-complete.
Focusing on line graphs, had a O(n) DP alg.
Option 2: Find an approximate answer.
Ex: Max-cut is NP-complete
We had O(n)-time expected ½-approximation
Option 3: Be exponential time but better than
brute-force search.
Option 4: Heuristics: fast algorithms that are not
always correct (or even approximate)
Option 5: Mix some of these options

Vertex Cover (Ex of Options 1 & 3)
42
Input: Undirected Graph G(V, E)
Output: Minimum Vertex Cover of G
Vertex Cover: S ⊆ V, s.t. for each (u, v) ∈ E:
either u ∈ S, or v ∈ S.
Fact: Vertex Cover is NP-complete:
3-SAT≤pCLIQUE≤pVERTEX-COVER

Vertex Cover Example (1)
43

Vertex Cover Example (1)
44

Vertex Cover Example (2)
45
B
DC
A
E
F
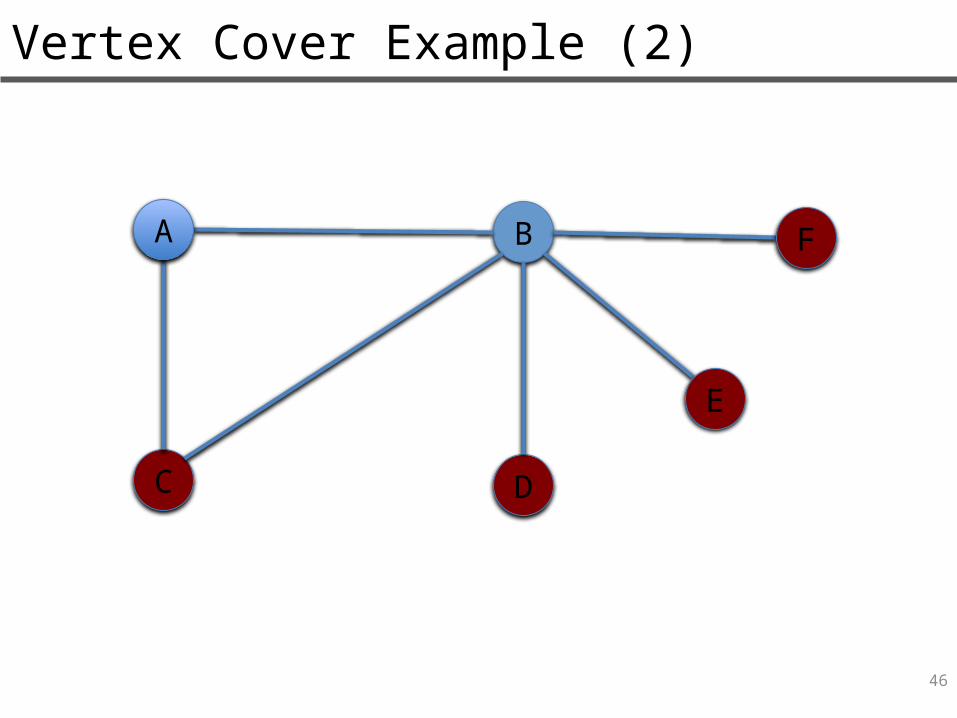
Vertex Cover Example (2)
46
B
DC
A
E
F

Vertex Cover Example (2)
47
B
DC
A F
Min Vertex Cover: {A, B}
F

Let’s Hope that There is a VC That’s Small
48
Suppose we know that ∃VC of size ≤ k, with k
small
So, we’re focusing on special case inputs
Bad Brute-force Search:
Look at all choose(n, k) possible VCs = Ω(nk)
So now we have a poly-time algorithm
Problem 1: we didn’t understand the problem
at all
Problem 2: even with k=5, we’re n5, not
practical

Smarter Brute-Force Search (1)
49
Consider an edge (u, v). Let S* be a VC with |S*|
≤ k
Q: What’s a claim about VCs that doesn’t need a
proof?
A: S* contains either (1) u or (2) v (or both)
Idea: Guess which case we’re in and recurse

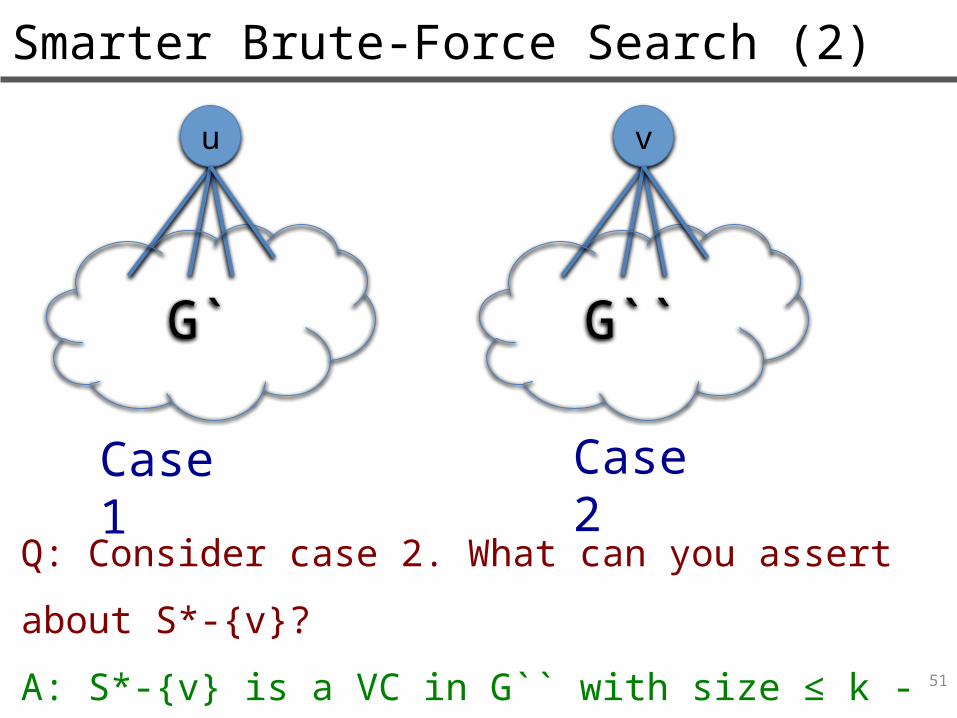
Smarter Brute-Force Search (2)
50
u
G`
v
G``
Case 1
Case 2
Q: Consider case 1. What can you assert about
S*-{u}?
A: S*-{u} is a VC in G` with size ≤ k -1.
Smarter Brute-Force Search (2)
51
u
G`
v
G``
Case 1
Case 2
Q: Consider case 2. What can you assert about
S*-{v}?
A: S*-{v} is a VC in G`` with size ≤ k -1.
Smarter Brute-Force Search (3)
52
G has a VC
of size ≤ k ⇔G` or G`` has
a VC of size ≤
k-1

Smarter Brute-Force Search Pseudocode
53
procedure Smarter-BruteFS (G(V,E), k):if k == 0:
if (G is empty): return empty-set else return null
pick an arbitrary edge (u, v)Let G` = (V – {u}, E- all (u, w))Let G`` = (V – {v}, E- all (v, w))
Let T1 = Smarter-BruteFS(G`, k-1)Let T2 = Smarter-BruteFS (G``, k-1)if (both T1 T2 are null) return nullelse return T1∪u or T2∪v
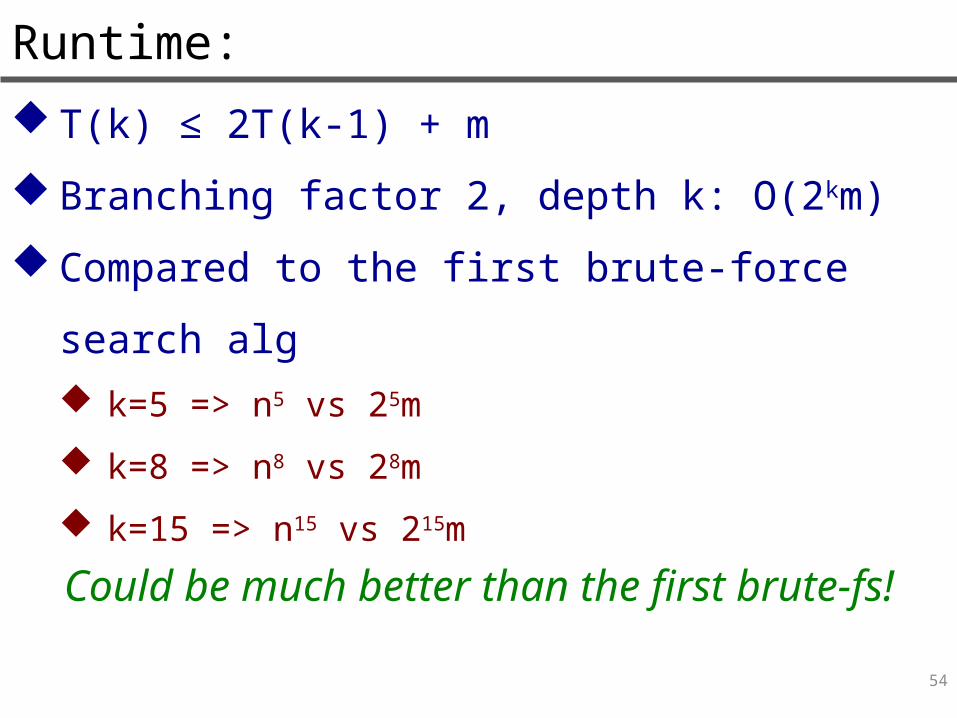
Runtime:
54
T(k) ≤ 2T(k-1) + m
Branching factor 2, depth k: O(2km)
Compared to the first brute-force search
alg k=5 => n5 vs 25m
k=8 => n8 vs 28m
k=15 => n15 vs 215m
Could be much better than the first brute-
fs!
TSP with Triangle Inequality (Options 1& 2)
55
Input: Complete graph G(V, E) non-negative edge
costs, where triangle inequality holds
Output: Min-cost tour [cycle visiting each vertex
once]
Triangle Inequality: ∀u, v, w: d(u, v) ≤ d(u, w) + d(w,
v)
Upshot: We will get at 2-approximation to OPT Tour
C*
Option 1 b/c we’re restricting to a subclass of all
inputs
Option 2 b/c we only approximate the exact solution

TSP with Triangle Inequality Example
56
D
CB
A2
11
32
2
Triangle Inequality: ∀u, v, w: d(u, v) ≤ d(u, w) + d(w,
v)

TSP with Triangle Inequality Example
57
D
CB
A2
11
32
2
Triangle Inequality: ∀u, v, w: d(u, v) ≤ d(u, w) + d(w,
v)
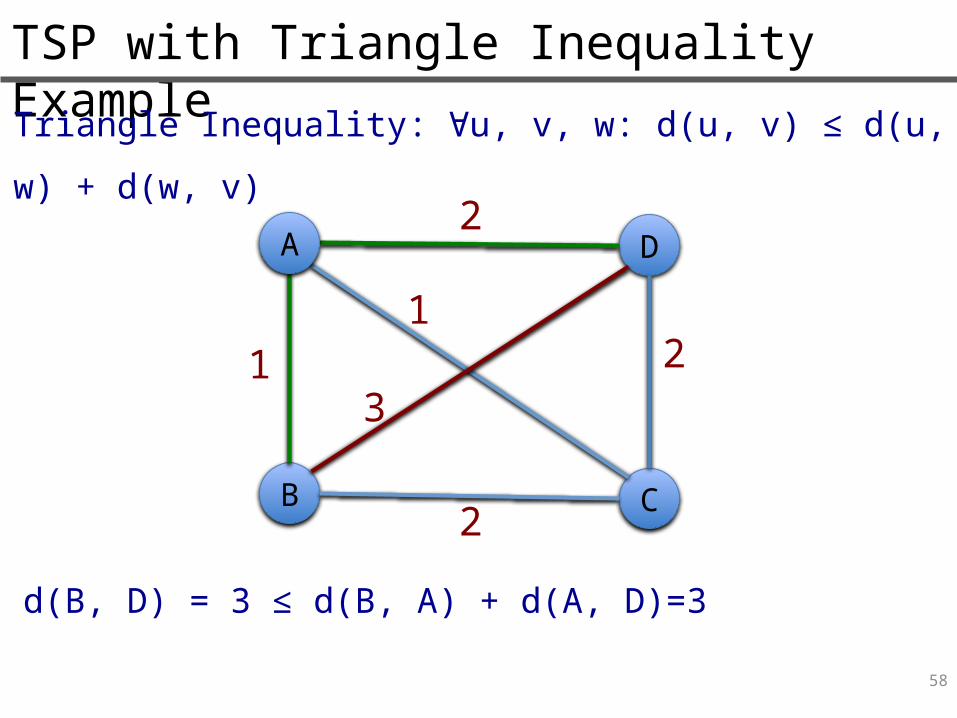
TSP with Triangle Inequality Example
58
D
CB
A2
11
32
2
Triangle Inequality: ∀u, v, w: d(u, v) ≤ d(u, w) + d(w,
v)
d(B, D) = 3 ≤ d(B, A) + d(A, D)=3
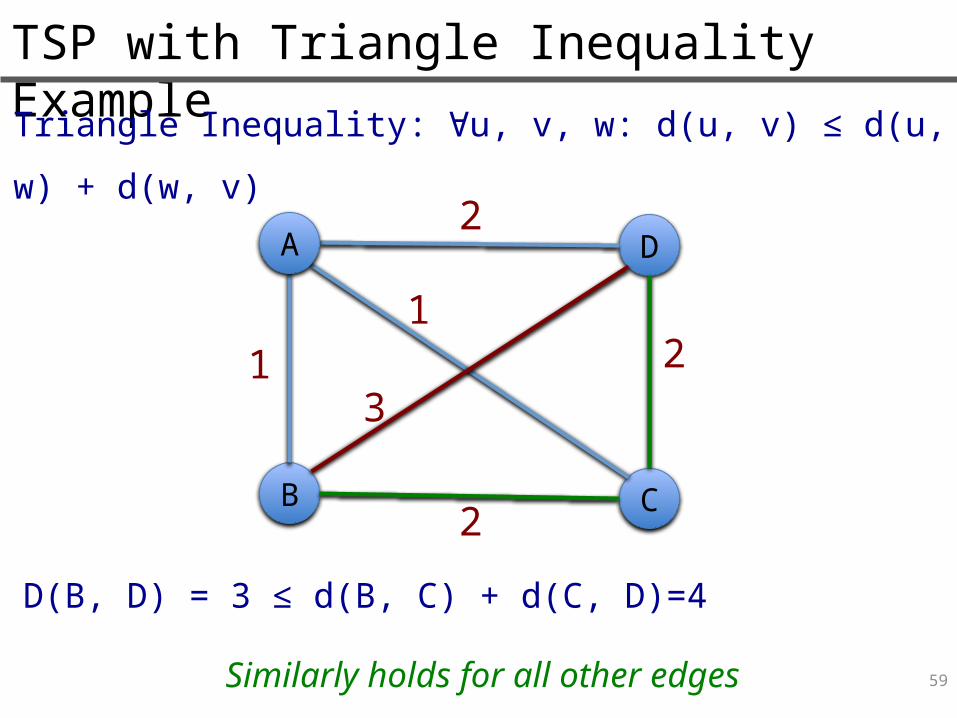
TSP with Triangle Inequality Example
59
D
CB
A2
11
32
2
Triangle Inequality: ∀u, v, w: d(u, v) ≤ d(u, w) + d(w,
v)
D(B, D) = 3 ≤ d(B, C) + d(C, D)=4
Similarly holds for all other edges
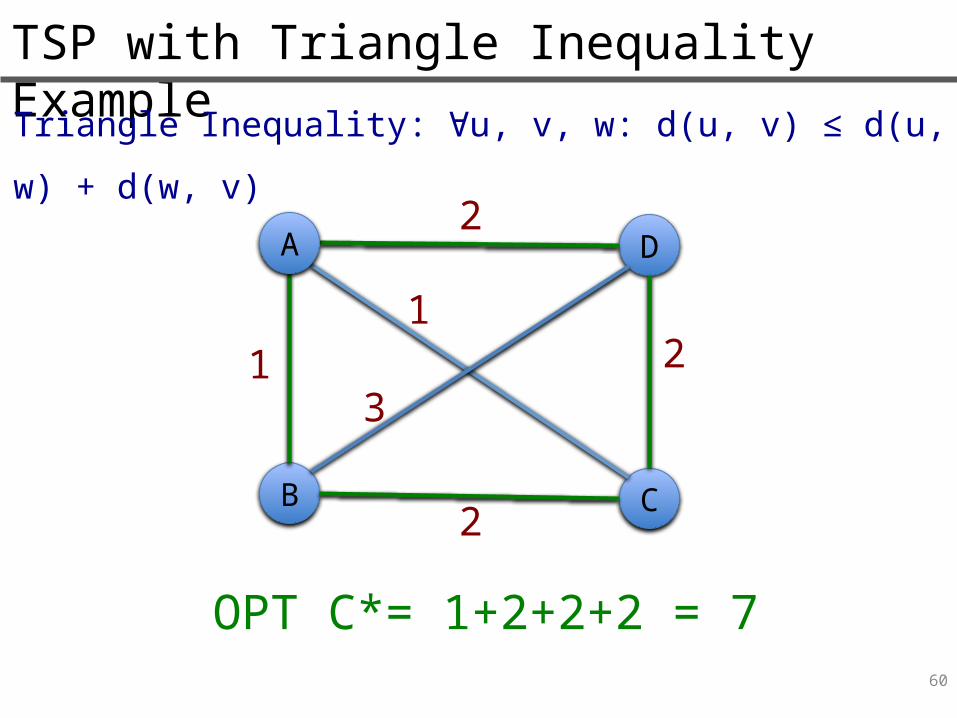
TSP with Triangle Inequality Example
60
D
CB
A2
11
32
2
Triangle Inequality: ∀u, v, w: d(u, v) ≤ d(u, w) + d(w,
v)
OPT C*= 1+2+2+2 = 7
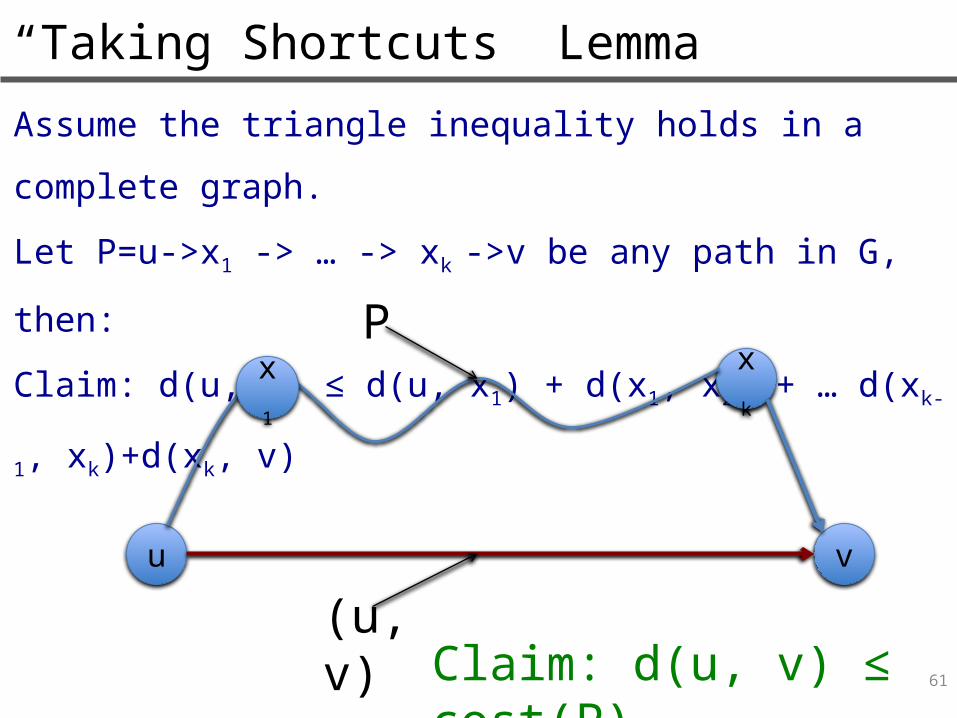
“Taking Shortcuts” Lemma
61
Assume the triangle inequality holds in a complete
graph.
Let P=u->x1 -> … -> xk ->v be any path in G, then:
Claim: d(u, v) ≤ d(u, x1) + d(x1, x2) + … d(xk-1, xk)
+d(xk, v)
u v
xkx1
P
(u,v) Claim: d(u, v) ≤
cost(P)

Proof by Induction on path lengths k
62
Base case: k=1 => This is true by the triangle
inequality
IH: Holds for path lengths k-1
d(u, v) ≤ d(u, xk) + d(xk, v) (by triangle inequality)
u v
xkx1
d(u, xk) ≤ d(u, x1) + d(x1, x2) + … d(xk-1, xk)
(by IH)d(u, v) ≤ d(u, x1) + d(x1, x2) + … d(xk-1, xk) +
d(xk, v)

Removing any Edge of TSP Tours
63
D
CB
A2
11
32
2
Any tour C is a simple cycle in the graph
Consider removing any edge of C: C-(u, v)
Ex: Consider C*, and remove (A, D) (any edge in
general)

Removing any Edge of TSP Tours
64
D
CB
A2
11
32
2
Any tour C is a simple cycle in the graph
Consider removing any edge of C: C-(u, v)
Ex: Consider C*, and remove (A, D) (any edge in
general)
Q: What other graph structure is C` = C –(A, D)?
A: C` is a spanning tree
B/c it has n-1 edges in it’s
connected

Cost(MST) ≤ Cost(C* - (u,v)) ≤ Cost(C*)
65
D
CB
A2
11
32
2
MST T* = 1 + 1 + 2 =4

Let’s Run a DFS On MST T*
66
D
CB
A2
11
32
2
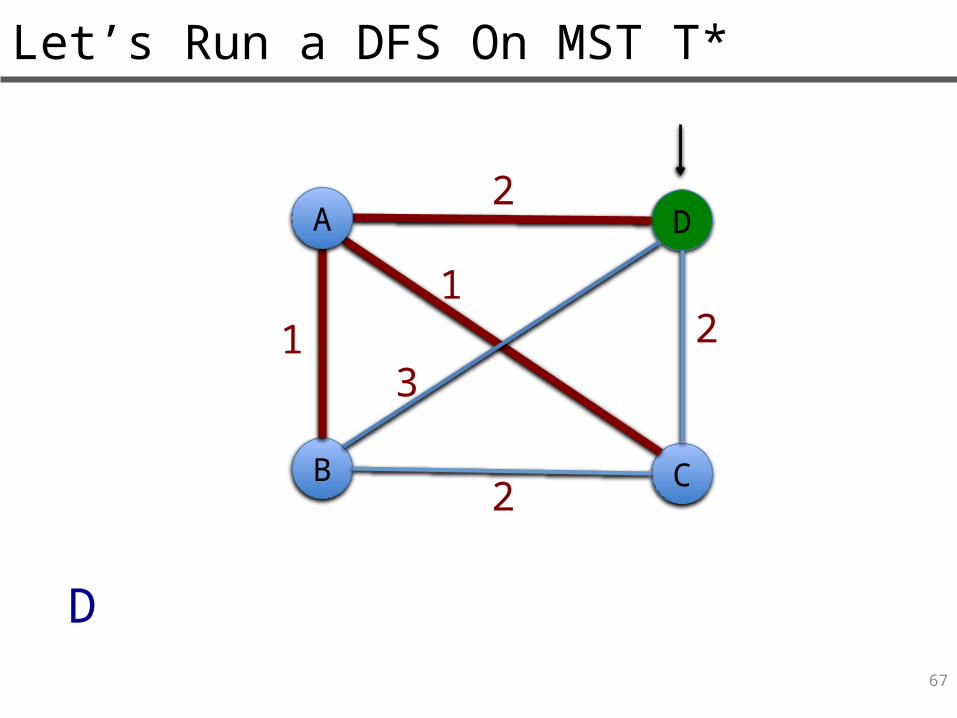
Let’s Run a DFS On MST T*
67
D
CB
A2
11
32
2
D
Let’s Run a DFS On MST T*
68
D
CB
A2
11
32
2
D -> A

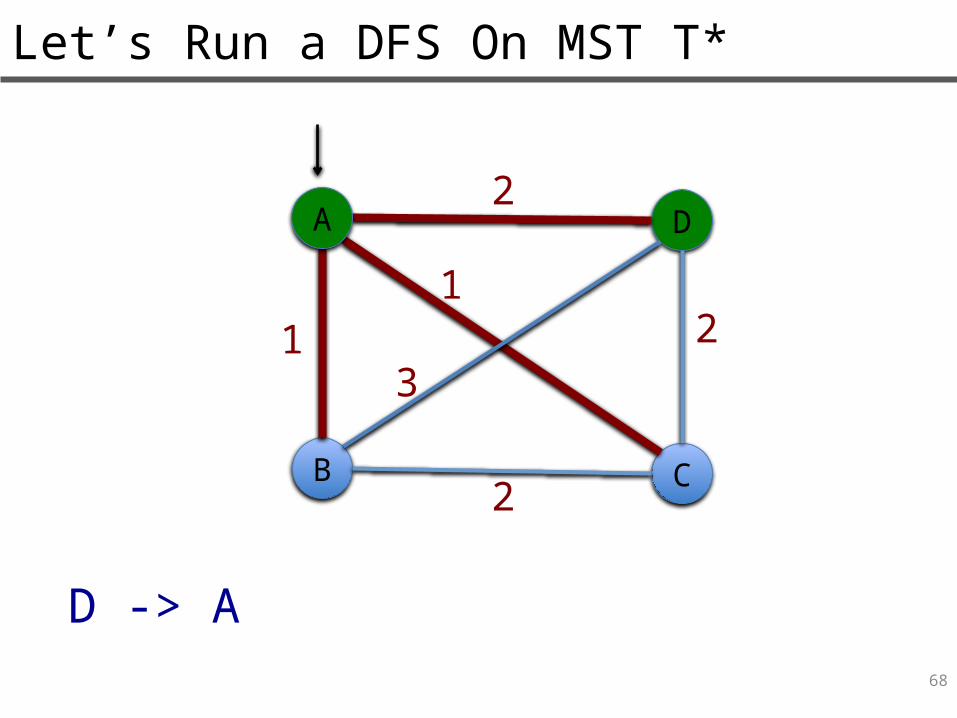
Let’s Run a DFS On MST T*
69
D
CB
A2
11
32
2
D -> A -> C
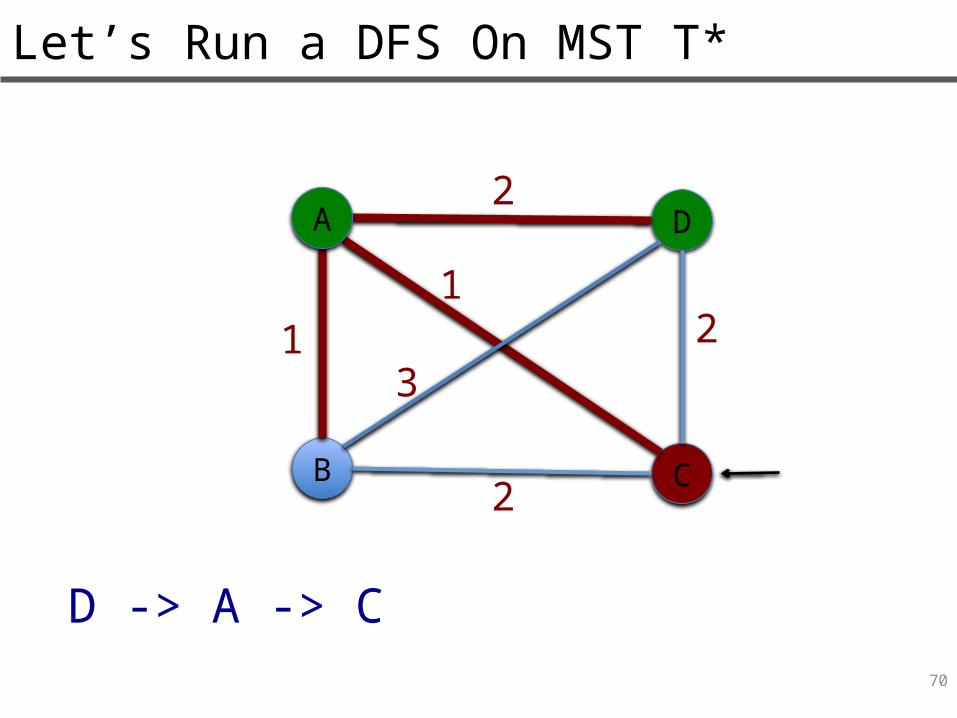
Let’s Run a DFS On MST T*
70
D
CB
A2
11
32
2
D -> A -> C
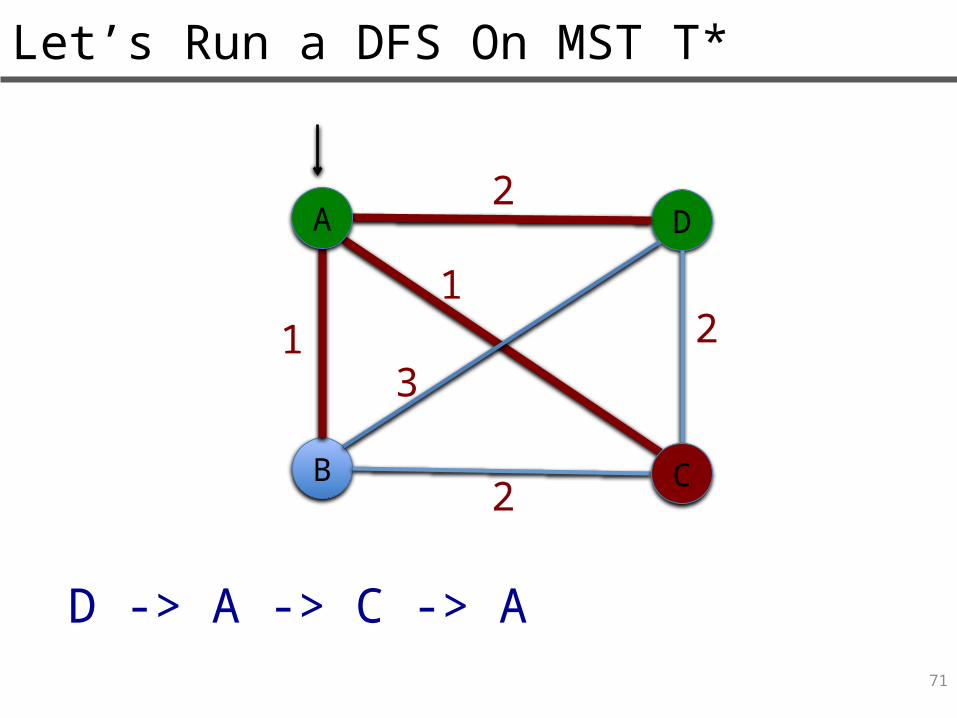
Let’s Run a DFS On MST T*
71
D
B
A2
11
32
2
D -> A -> C -> A
C
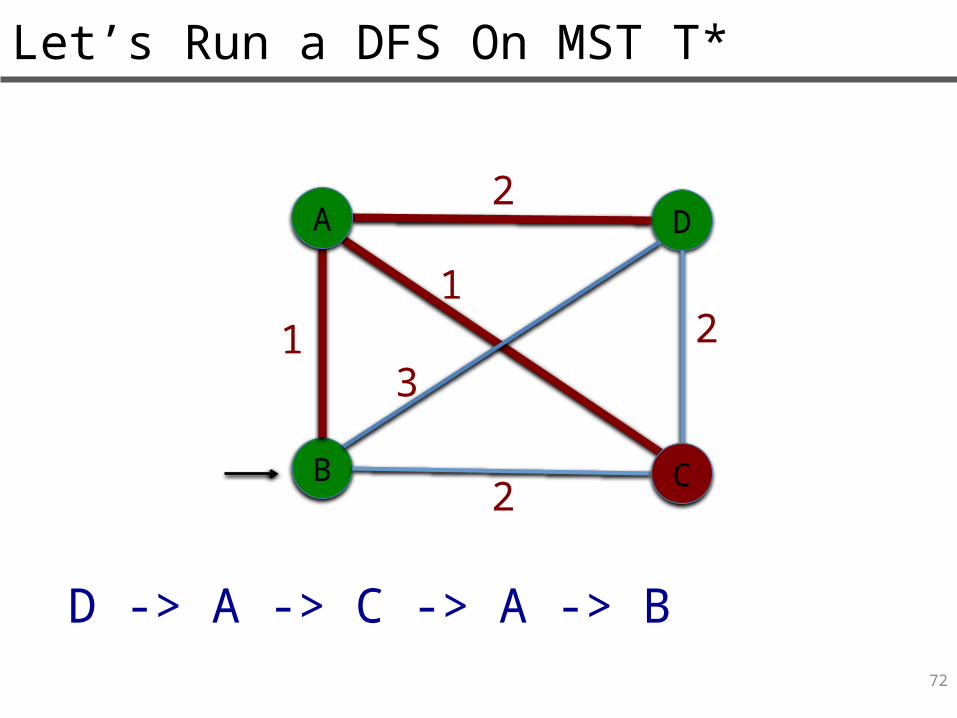
Let’s Run a DFS On MST T*
72
D
B
A2
11
32
2
D -> A -> C -> A -> B
C
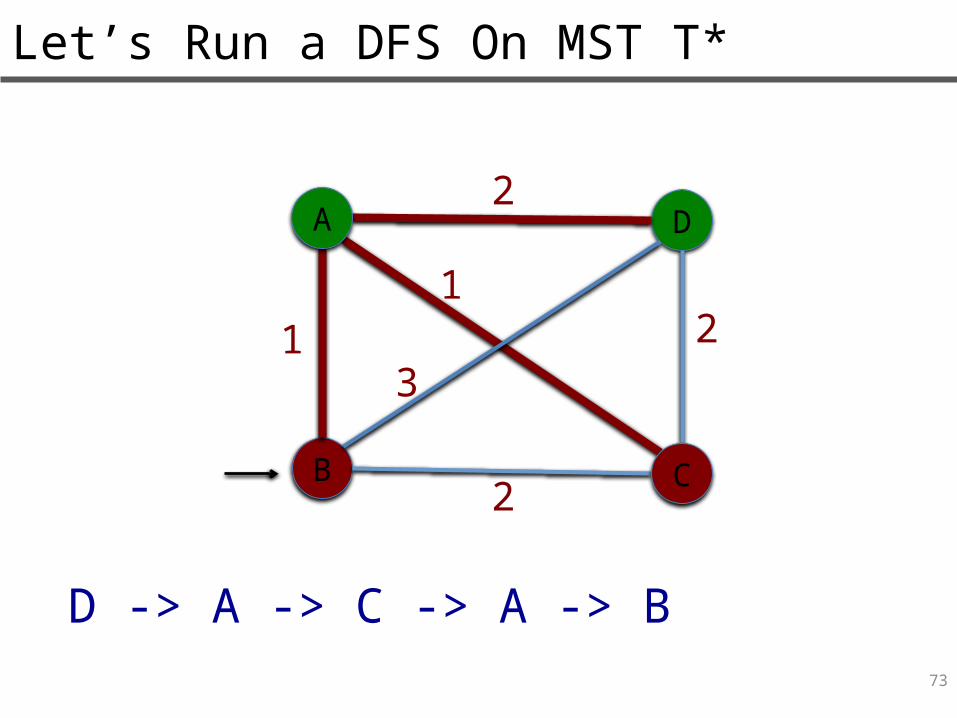
Let’s Run a DFS On MST T*
73
D
B
A2
11
32
2
D -> A -> C -> A -> B
C
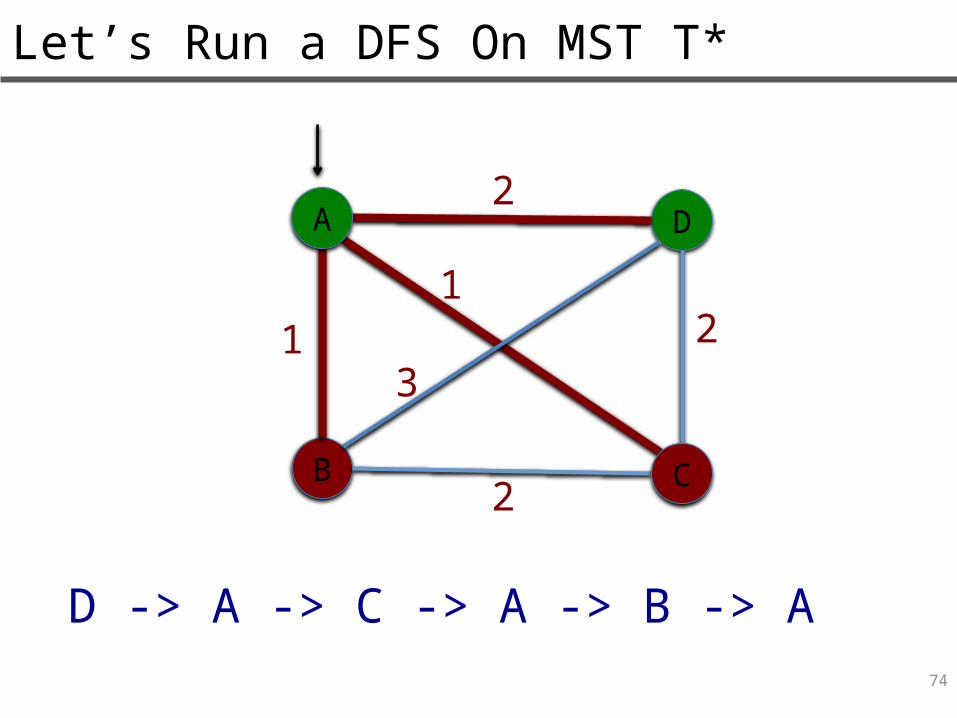
Let’s Run a DFS On MST T*
74
D
B
A2
11
32
2
D -> A -> C -> A -> B -> A
C
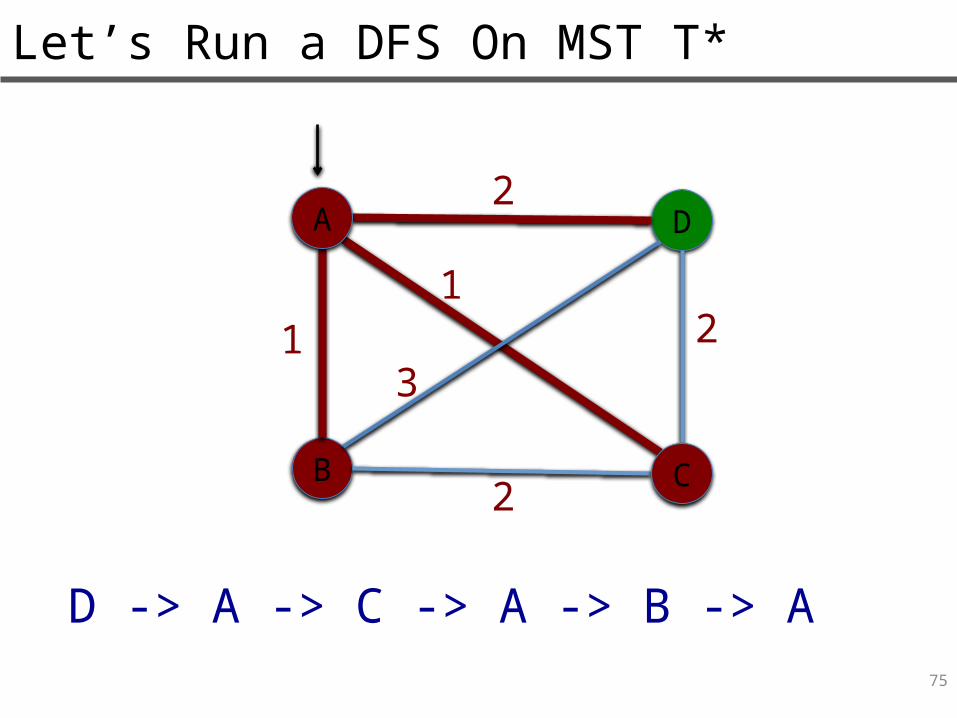
Let’s Run a DFS On MST T*
75
D
B
A2
11
32
2
D -> A -> C -> A -> B -> A
C

Let’s Run a DFS On MST T*
76
D
B
A2
11
32
2
D -> A -> C -> A -> B -> A -> D
C
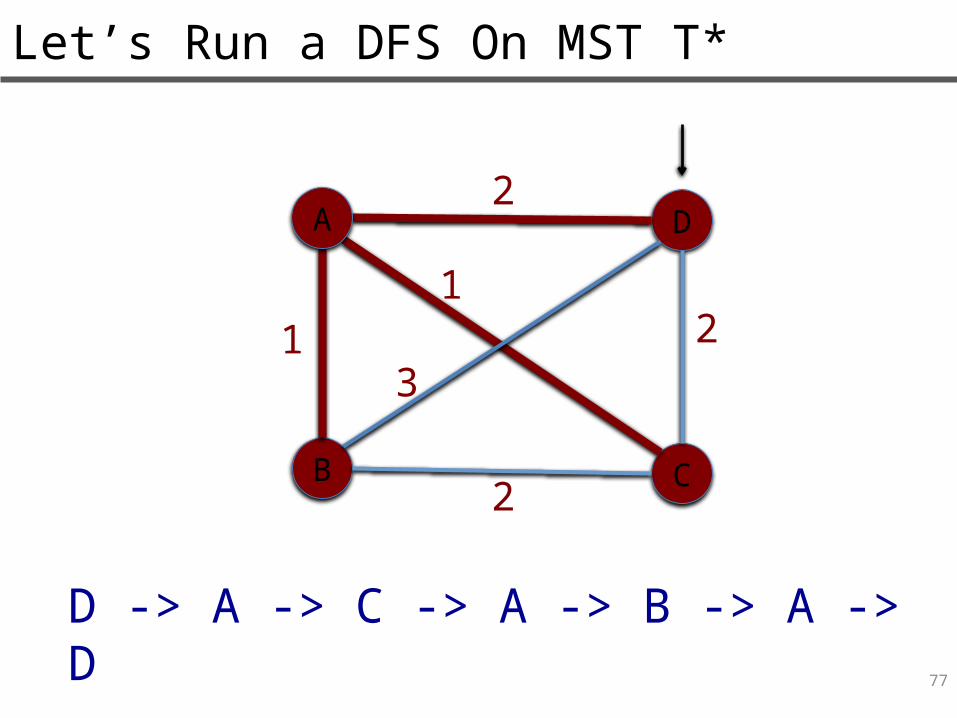
Let’s Run a DFS On MST T*
77
D
CB
A2
11
32
2
D -> A -> C -> A -> B -> A -> D
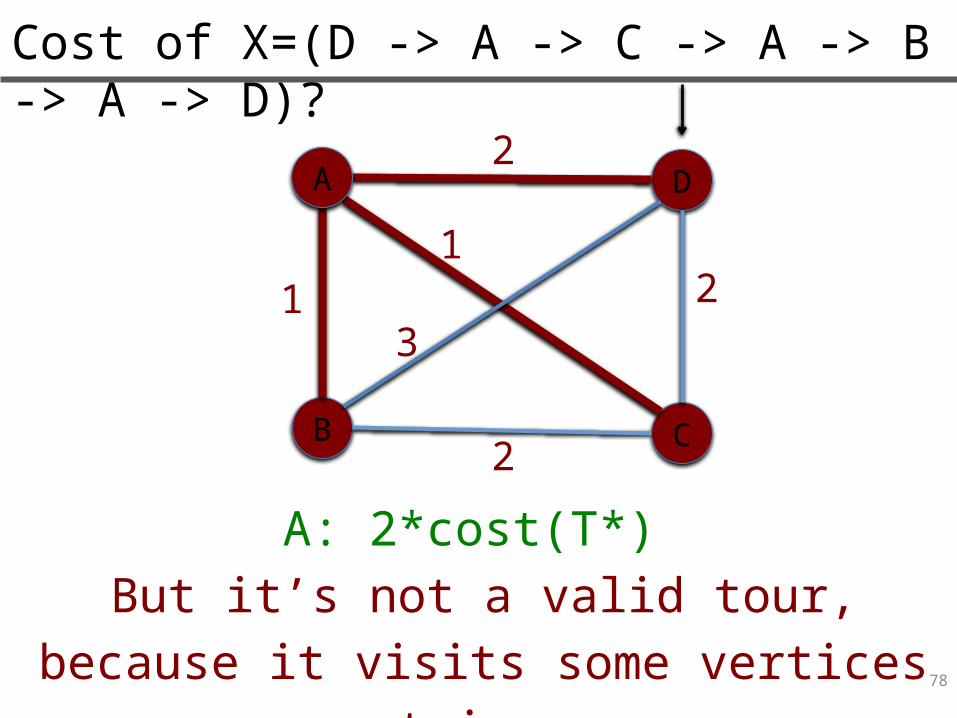
Cost of X=(D -> A -> C -> A -> B -> A -> D)?
78
D
CB
A2
11
32
2
A: 2*cost(T*) But it’s not a valid tour, because it
visits some vertices twice.

Trimming X=(D -> A -> C -> A -> B -> A -> D)
79
D -> A -> C -> A -> B -> A -> D
Trim X by taking “shortcuts”.
D

Trimming X=(D -> A -> C -> A -> B -> A -> D)
80
D -> A -> C -> A -> B -> A -> D
Trim X by taking “shortcuts”.
D
Trimming X=(D -> A -> C -> A -> B -> A -> D)
81
D -> A -> C -> A -> B -> A -> D
Trim X by taking “shortcuts”.
D -> A
Trimming X=(D -> A -> C -> A -> B -> A -> D)
82
D -> A -> C -> A -> B -> A -> D
Trim X by taking “shortcuts”.
D -> A

Trimming X=(D -> A -> C -> A -> B -> A -> D)
83
D -> A -> C -> A -> B -> A -> D
Trim X by taking “shortcuts”.
D -> A -> C
Trimming X=(D -> A -> C -> A -> B -> A -> D)
84
D -> A -> C -> A -> B -> A -> D
Trim X by taking “shortcuts”.
D -> A -> C
Trimming X=(D -> A -> C -> A -> B -> A -> D)
85
D -> A -> C -> A -> B -> A -> D
Trim X by taking “shortcuts”.
D -> A -> C
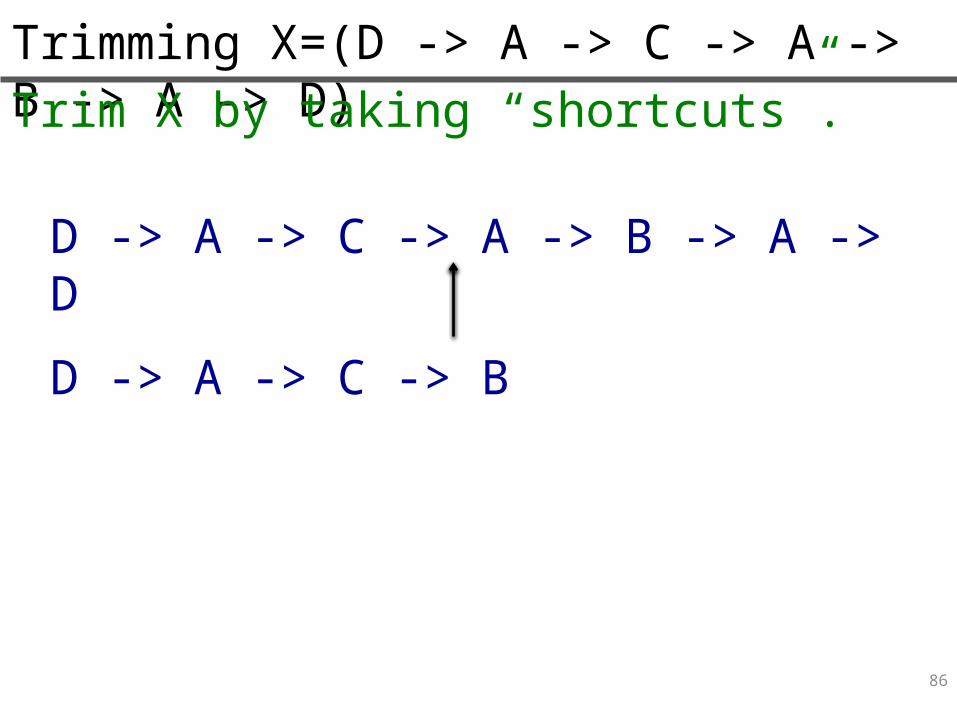
Trimming X=(D -> A -> C -> A -> B -> A -> D)
86
D -> A -> C -> A -> B -> A -> D
Trim X by taking “shortcuts”.
D -> A -> C -> B

Trimming X=(D -> A -> C -> A -> B -> A -> D)
87
D -> A -> C -> A -> B -> A -> D
Trim X by taking “shortcuts”.
D -> A -> C -> B
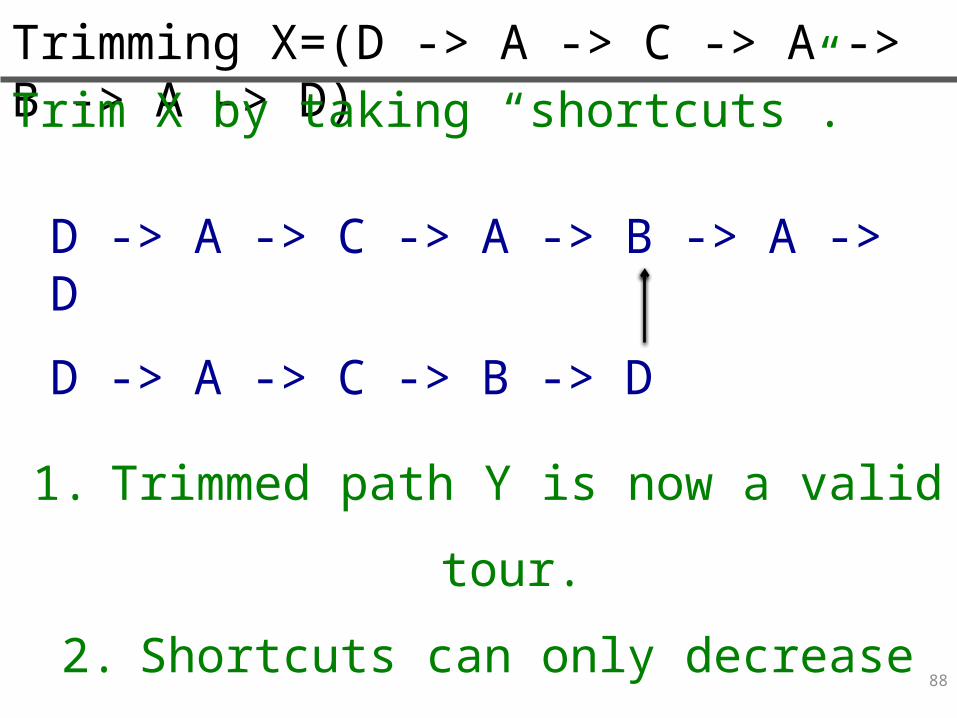
Trimming X=(D -> A -> C -> A -> B -> A -> D)
88
D -> A -> C -> A -> B -> A -> D
Trim X by taking “shortcuts”.
1. Trimmed path Y is now a valid tour.
2. Shortcuts can only decrease the
cost
=> cost(Y) ≤ 2cost(T*) ≤ 2C*
D -> A -> C -> B -> D

2-Approx TSP with Triangle Inequality
89
procedure 2-ApproxTSP(G(V,E), edge weights):
Let T* = MST(G(V, E)) // Kruskal/PrimRun DFS(T*) and get a non-simple tour
XY = trim(X)return YCorrectness (already argued)
Run-time: O(mlog(n))

Summary
90
1. Took TSP, an NP-complete problem (don’t
hope to solve exactly in general form)
2. Restricted inputs to those with triangle
ineq.
3. Got a 2-approximation in O(mlog(n)) time

Attacking NP-complete Problems
91
Option 1: Focus to special-case inputs.
Ex: Independent Set is NP-complete.
Focusing on line graphs, had a O(n) DP alg.
Option 2: Find an approximate answer.
Ex: Max-cut is NP-complete
We had O(n)-time expected ½-approximation
Option 3: Be exponential time but better than
brute-force search.
Option 4: Heuristics: fast algorithms that are not
always correct (or even approximate)
Option 5: Mix some of these options
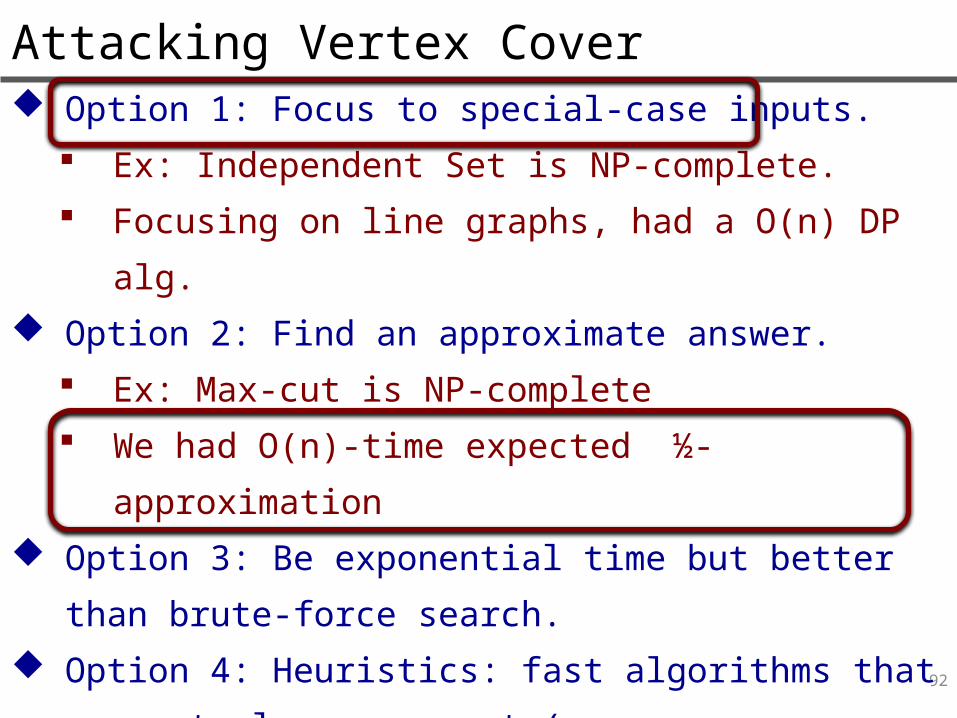
Attacking Vertex Cover
92
Option 1: Focus to special-case inputs.
Ex: Independent Set is NP-complete.
Focusing on line graphs, had a O(n) DP alg.
Option 2: Find an approximate answer.
Ex: Max-cut is NP-complete
We had O(n)-time expected ½-approximation
Option 3: Be exponential time but better than
brute-force search.
Option 4: Heuristics: fast algorithms that are not
always correct (or even approximate)
Option 5: Mix some of these options

Attacking TSP
93
Option 1: Focus to special-case inputs.
Ex: Independent Set is NP-complete.
Focusing on line graphs, had a O(n) DP alg.
Option 2: Find an approximate answer.
Ex: Max-cut is NP-complete
We had O(n)-time expected ½-approximation
Option 3: Be exponential time but better than
brute-force search.
Option 4: Heuristics: fast algorithms that are not
always correct (or even approximate)
Option 5: Mix some of these options
94
More on Approaching NP-complete
problems on Wednesday (Knapsack)