introducing the ocean engineering software library from
TRANSCRIPT

Introducing
The Ocean Engineering Software Library
from SeaSoft Systems®
•Executive Summary••Library Contents••General Features•
•Typical Applications••Program Descriptions•
CONTENTS
Copyright © 2016 by SeaSoft Systems. All rights reserved. SeaSoft is a registered trademark of SeaSoft Systems.

MICROCOMPUTER EXECUTION ABILITY
Each program is highly transportable and has beenengineered to execute efficiently on portable and desk-top microcomputers; the same programs used in theoffice on a multi-user mainframe computer can be usedin the field for on-site operational support. Microcom-puter execution ability has been achieved by carefulprogram planning rather than sacrifice of capabilities; inevery case, the SeaSoft programs are of greater powerthan comparable codes requiring mainframe computersfor execution.
AUTHOR QUALIFICATIONS
The author of the library holds a Ph.D. degree intheoretical physics from the University of Californiaand an M.S. degree in aerodynamics and hydrodynam-ics from the University of Minnesota. He has beendirectly involved in mathematical and computer analy-sis and model testing of offshore systems since 1973.The basic theoretical methods employed in the pack-ages have received extensive confirmation in model-scale and full-scale tests during that time.
AVAILABILITY
Software is available in object-code and/or source-code format on a limited perpetual license basis whichprohibits transfer or commercial timeshare appli-cations. In addition, SeaSoft will customize library vo-lumes to accommodate special needs or to incorporateunusual or proprietary features and capabilities. Forfurther information regarding license of individual vo-lumes, contact SeaSof t systems.
SERVICES
SeaSoft Systems provides expert analysis servicesbased upon the program library volumes. These serv-ices provide a mechanism for interested parties to be-come thoroughly acquainted with library software ca-pabilities before committing to license purchase.
PROLOGUE
The SeaSoft family of computer programs comprisesa group of stand-alone state of the art software analysispackages for ocean engineering applications. Theseprograms are designed to enhance in-house engineer-ing productivity by providing a consistent, intuitiveand easy to use software environment for analysis of abroad range of problems of importance to the offshoreindustry.
AUDIENCE
Marine engineers and naval architects engaged inoffshore operations or design. No special analytical,computational or computer skills are required to makefull use of these tools.
OBJECTIVES AND CAPABILITIES
The library was developed to investigate problemscommonly studied in model-scale tests. Emphasis is onmotions and loads, which are analyzed using regularwave and short- and long-crested irregular wavemodels. Irregular wave capabilities comprise compre-hensive statistical summaries, including root-mean-square motions and loads required for downtime orfatigue analyses and storm “peak” motions and loadsrequired for survival or equipment failure analyses.The programs utilize nonlinear dynamical and statisti-cal procedures to prepare estimates of system perfor-mance using “nonlinear frequency-domain” analyticalmethods whose output is much easier to interpret thanconventional “time-domain” analyses and whose exe-cution requires only a fraction of the computationaleffort. The programs possess capabilities for evaluationof conditions which are difficult to study at model scalein conventional test facilities, such as deep water moor-ings or multi-directional sea conditions.
EXTENDED PROGRAM DESCRIPTIONS
Demonstration programs and extended descriptionsof individual library volumes, including sample prob-lem input and output streams, are available from Sea-Soft Systems upon request or at the SeaSoft website(http://www.seasoftsys.com).
Executive Summary
Phone: (805) 683-3002 610 Alto Drive, Santa Barbara, CA 93110 Fax: (805) 683-0440

SeaSoft Systems
Phone: (805) 683-3002 3 Fax: (805) 683-0440
Library Contents
• Volume 11 - SALMsimModels articulated riser-buoy-yoke single-point
mooring systems with attached storage vessels. Re-quires Shipsim, Semisim, or user-specified vesselRAOs for execution. Static, low-frequency and wave-frequency dynamic modeling of vessel and riser/buoymotions and loads with emphasis on SALM integrity inextreme conditions. [A]
• Volume 12 - MoorsimModels a vessel in a conventional spread moor.
Requires Shipsim, Semisim, Discsim or user-specifiedvessel RAOs for execution. Static, low-frequency andwave-frequency dynamic modeling of vessel motionsand mooring line loads with emphasis on mooring linestructural integrity in extreme conditions. [A]
• Volume 13 - CALMsimModels the interconnected buoy and vessel of single-
point mooring arrangements comprising CALM-buoysystems with attached storage vessels. RequiresShipsim, Semisim, Discsim or user-specified vesselRAOs for execution. Emphasis on mooring line andhawser structural integrity in extreme conditions. [A]
• Volume 14 - TLPsimModels platform motions and tendon structural loads
for a tension leg platform. Requires Semisim or user-specified vessel RAOs for execution. [A]
• Volume 15 - SPMsimModels single-point catenary-based mooring systems
including turret-moored vessels. Requires Shipsim,Semisim, or user-specified vessel RAOs for execution.Static, low-frequency and wave-frequency dynamicmodeling of vessel motions and mooring line loads withemphasis on mooring line structural integrity in ex-treme conditions. [A]
• Volume 16 - SparsimModels mooring of caisson-spar vessels with catenary
based moorings. Static, low-frequency and wave-frequency dynamic modeling of vessel motions andmooring line loads with emphasis on mooring linestructural integrity in extreme conditions. [A]
• Volume 1 - ShipsimModels displacement-hull wave-frequency vessel
dynamics and seakeeping performance. [A]
• Volume 2 - Jacksim
• Volume 3 - SemisimModels seakeeping performance of semi-submersible
platforms in the ballasted condition (displacement hullssubmerged). [A]
• Volume 4 - DiscsimModels seakeeping performance of disc-shaped
vessels and buoys which are azimuthally symmetric inplan view. [A]
• Volume 7 - StatmoorComputes lateral static restoring characteristics of
complex multileg catenary mooring systems withbuoys, clumped weights and varying ocean bottomtopography. [A]
• Volume 8 - CatsimComputes static restoring characteristics of complex
multileg catenary mooring systems for arbitrary hori-zontal, vertical or rotational offsets. [A]
• Volume 9 - SlowsimComputes static and low-frequency heading-depen-
dent vessel forces and moments arising from wind,current and wave drift action for a variety of vessel typesand configurations. [A]
• Volume 10 - TowsimModels a pair of vessels connected by a towline of
arbitrary composition. Computes line dynamic loadvariations; requires Shipsim, Semisim, Jacksim oruser-specified vessel RAOs for execution. Static, low-frequency and wave-frequency modeling of motionsand towline loads with emphasis on towline structuralintegrity in extreme conditions. [A]
Expected release dates of unfinished volumes are indicated in brackets; [A] indicates immediate availability.
®
™
®
®
®
®
®
®®
®
®
®
®
®
January, 2016
Models jack-up drilling platforms while floating, setting-down or moving off; estimates leg loads in- curred during spud-can/bottom impact in a seaway. [In Progress]

SeaSoft Systems
Phone: (805) 683-3002 4 Fax: (805) 683-0440
General Features
• Interface to SeaSoft’s universal plotting routine toproduce x-y point plots of selected tabular data.
• Comprehensive user manuals which outline the useof each program and explain in detail its capabilities.Each contains a detailed sample input/output sessioncomprising a realistic application. Manuals includetable of contents and index.
• A data entry and editing interface (the “editor”)which provides simplified access to the main computa-tional program. This permits input files, once created, tobe easily modified to account for major or minorchanges or errors. The editor programs utilize an easy-to-use single-item replacement format for data entryand update. Input files can be archived and reused anynumber of times. Backup files are made each time aninput file is modified, facilitating the archival processand protecting against inadvertent loss of importantdata. Built-in “help” menus reduce the need for consul-tation of user manuals. Insofar as possible, each pro-gram uses the same input/output formats, proceduresand nomenclature conventions so that the user of anyprogram will easily be able to use and interpret proce-dures and results of any other program.
All SeaSoft program packages include the followinggeneral features and capabilities:
• Input/output of data in either English or metricunits.
• Complete six-degree-of-freedom motion and loadanalysis and estimation of acceleration, velocity or dis-placement response characteristics at any point on thevessel. The latter ability facilitates many importantengineering evaluations. For example:
❖ dynamic mooring loads due to fairlead motions
❖ vessel motions relative to a fixed platform orcrane load
❖ jack-up spud can motions relative to the sea floor
• Attractive formatted tabular output on 8-1/2 x 11inch sheets for easy inclusion in reports or other docu-mentation.
• Transportability of programs to virtually any com-puter, achieved by careful adherence to ANSI FOR-TRAN-77 standards in source code preparation. Allcode has been carefully optimized to execute efficientlyon microcomputers.
• Output control, allowing user selection of outputvariables for each run and specification of output device(console, printer or magnetic media).
• Complete control over water depth, with fullaccommodation of shallow-water wave effects whichgenerally become significant in water less than 300 feetdeep whenever wave periods exceed about 14 secondsor when wind-driven seas exceed a significant waveheight of about 30 feet. These conditions are well withinthe probable scope of any moderately comprehensivevessel motion study. In drilling, jack-up or single pointmooring applications, water depths considerably lessthan 300 feet are commonplace.
January, 2016

SeaSoft Systems
Phone: (805) 683-3002 5 Fax: (805) 683-0440
All dynamics packages include the followingREGULAR WAVE capabilities:
• Complete user control over regular wave periods,directions, and wave heights or slopes used in thecalculation of regular wave response characteristics(RAOs).
• Output of both amplitude and phase of regularwave response characteristics for all requested regularwave conditions and all requested output variables.
• In addition, vessel motions packages feature usercontrol over the regular wave output stream allowingsuppression or inclusion of:
❖ Regular Wave Motion response for any or all sixdegrees of freedom.
❖ Acceleration, velocity or displacement responsecharacteristics at user-specified points on the vessel.
❖ Net Regular Wave Force and/or Moment re-sponses for any or all six degrees of freedom.
Where appropriate, dynamics packages producewave-height dependent RAOs, reflecting importantsystem nonlinearities.
All dynamics packages include the followingIRREGULAR WAVE capabilities:
• Specification of wave spectral type, including :
❖ Pierson-Moskowitz❖ Mean, Sharp, Very Sharp JONSWAP❖ Bretschneider/ISSC❖ User-Specified
• Calculation of r.m.s. values, r.m.s. rates and charac-teristic spectral periods of all requested variables.
• Specification of the degree of azimuthal spreadingof irregular wave energy; i.e., the degree of wave crestshortening due to cross seas, leading to modeling ofoperations in short-crested irregular waves.
• Specification of simultaneous swell (period, height,direction).
• In addition, vessel motions packages feature calcu-lation of “air-gap” statistics at any point on the vessel toestimate wave clearance characteristics (e.g., wave slapon the deck of a semi-submersible in survival condi-tions).
General Features 2
January, 2016

SeaSoft Systems
Phone: (805) 683-3002 6 Fax: (805) 683-0440
OPERATIONAL SUPPORT
• A semi-submersible moves from the North Sea,where wind-wave frequency spectra are typicallysharply peaked, to offshore Africa where normal condi-tions include a persistent background ocean swell andwhere wind-wave energy is generally spread over alarger frequency bandwidth; how will motion-relateddowntime be affected by the move? [Semisim]
• An ocean-going barge under tow passes from anarea with wave conditions dominated by intense, lo-cally generated wind driven waves into an area withwave conditions dominated by heavy, unidirectionalswell from a distant storm. Can towline tension oscilla-tions be reduced by paying out or taking home towlineor by a temporary course alteration? [Towsim]
• A jack-up moves from an area subjected to moderatelocal wind-driven sea conditions but protected fromdistant swell to a location exposed to persistent long-period swell; what quantitative difference in motionperformance afloat and during leg installation can beexpected? What is the expected waiting-on-weatherwindow for setting-down operations given the antici-pated swell height and period? [Jacksim]
• A crane barge moves outside the exposed mouth ofa sea-facing channel from inside the channel proper;how will crane motions and accelerations be affected bythe deeper water and the increased directional spread-ing of the seas at the new location? [Shipsim]
• A drilling company wishes to bid on a drillingcontract for a lease area in water deeper than that forwhich their wire-rope mooring system was designed.Will the simple addition of anchor-end chain providethe required station keeping capability and will theredesigned mooring system produce tolerable linetension oscillations in the forecast 10 year storm?[Moorsim]
EQUIPMENT FAILURE
• A drilling company is experiencing periodic linkfailures in the oil-rig-quality mooring chain on adrillship even though logs of shipboard tensiometerreadouts do not indicate that line tensions have ex-ceeded tolerable limits. Can the repeated failures beattributed to predictable environmentally-producedline-tension oscillations, perhaps implicating malad-justed tensiometer equipment, or is the quality of thechain suspect? [Moorsim/Shipsim]
• A moored weather buoy is lost due to a mooring linefailure in an exceptionally heavy winter storm. Can theline failure be attributed to the storm alone, or is mate-rial fatigue implicated? [Moorsim/Discsim]
• A freight barge under tow from Japan to Seattlesinks during a severe storm due to towline failure andsubsequent loss of directional control. Can the towlinefailure be attributed to a substandard towline, or wereobserved (and/or hindcast) conditions sufficient to re-sult in towline failure regardless of towline condition,indicating a need for towline redesign for this route andseason? [Towsim]
• A self-elevating unit’s jacking gear is damagedduring setting-down operations on an exceptionallyhard, rocky bottom even though vessel motionsremained within normal limits for the operation. Canthe damage be rationally attributed to the unusuallyhard bottom or should fatigue or other structural flawsin the jacking gear be suspect? Should guidelines foroperations in that area be modified as as result of themishap? [Jacksim]
Typical Applications
January, 2016

SeaSoft Systems
Phone: (805) 683-3002 7 Fax: (805) 683-0440
• A near-shore SALM-moored tanker has experi-enced unexpected fatigue fractures in the yoke memberof the mooring structure. Observers have noted that thelow-frequency excursions of the tanker have been per-sistently larger for the observed wave, wind and currentconditions than predicted on the basis of model testdata. The presence of a weakly time-varying currentcomponent at the site, not modeled in the wave basintesting series, is suspected of exciting resonant low-frequency mooring oscillations. Are the observed spec-tral characteristics of these current speed fluctuationssufficient to account for the additional vessel motionand yoke fatigue damage? [SALMsim]
SYSTEM DESIGN ANALYSES
• Parametric studies on the influence of fore-aft turretlocation on pitch-related chain loads for a tanker-basedmarginal-field development system. [SPMsim]
• Screening of various combinations of Kevlar, wirerope and chain to achieve, at minimum materials ex-pense, a prescribed load versus offset curve for a deepwater catenary leg mooring system design. [Statmoor]
• Screening of CALM buoy designs to achieve mini-mum average fairlead motions in the presence of persis-tent eight to ten second swell conditions. [Discsim]
• Screening of potential candidates for award of adrilling contract to a moored drillship or semi-submersible in order to estimate, for a particular site andenvironment, which will be the most cost-effective.[Shipsim/Semisim]
• Screening of possible SALM designs (i.e., weightand buoyancy distribution) to achieve minimal dy-namic load variations in preparation for a model basinanalysis of a single candidate. [SALMsim]
The appropriate SeaSoft library programs canquickly evaluate these situations and provide valuableguidance to system designers, analysts and operationspersonnel. Vessel performance in the complete range ofpossible sea conditions for a given site or route can bethoroughly investigated by engineering staff. Paramet-ric studies of the effects on performance of vessel loadconditions, irregular wave spectral composition, theeffects of crossed seas and background swell can becarried out entirely in-house.
Typical Applications 2
January, 2016

SeaSoft Systems
Phone: (805) 683-3002 8 Fax: (805) 683-0440
values.Volume 1: Shipsim Volume 2: Jacksim
Program-Specific Descriptions
Shipsim is a general-purpose six degree-of-freedomwave-frequency vessel motions program specificallyenhanced for displacement-hull vessels with relativelylarge block coefficients. Vessels in this category includedrillships, barges and tankers. Shipsim utilizes an ef-ficient algorithm for calculating wave-frequency forcesand moments which permits accurate modeling usingas input only gross hydrostatic and mass properties(metacentric heights, displacements, overall dimen-sions, centers of gravity, gyradii, etc.), eliminating theneed for tedious and error-prone input of vessel linesdetails. This typically permits comprehensive analysesto be completed in one hour or less. Non-linear effects,particularly in the roll degree of freedom, are fullymodeled, leading to realistic roll response predictionswhich depend on details of bilge geometry. A widerange of environmental conditions is accommodated,including extensive built-in wave spectral types,azimuthal spreading of wave directions and an optionalindependent background swell. Accelerations, veloci-ties and displacements at any point on the vessel can becomputed. Effects of finite water depth are fullymodeled and either English or metric units may beselected for vessel specification and data output. Out-put is in the form of amplitude and phase of vesselResponse Amplitude Operators (RAOs) and/or statisti-cal characterizations of vessel response to irregularwave conditions. Calculations are carried out in thefrequency domain, resulting in short execution timesand unambiguous predictions of statistical response
Jacksim is a powerful motion modeler for analysis ofwave-frequency motions of jack-up drilling vessels inthe floating mode. In addition to the six degree-of-freedom afloat motions capabilities common to allSeaSoft motion programs, this package includes:
• A sophisticated analysis of the dynamic leg loadsassociated with going on location in the presence ofwaves. This feature includes specification of oceanbottom soil conditions. The leg-load estimation capabil-ity provides an important new tool for the operationalengineer or marine surveyor. This capability aids in thequantification of the difficult and highly subjectiveprocess of evaluating structural risks associated withgoing on location in marginal sea conditions. The easeof use and microcomputer execution capability of thisprogram mean that the program load estimates can beobtained in real time, on location, by the engineer orsurveyor in charge.
• A novel calculation of leg bending loads incurredgoing off location in the presence of waves when one ormore legs are trapped or otherwise restrained by en-trapment in soft bottom materials.
• A nonlinear hull and leg damping algorithm whichleads to realistic nonlinear response functions.
• Evaluation of vessel motion characteristics for anyposition of the legs, from fully raised to fully lowered,and specification of the degree of leg-well blockage byspud can insertion during tow or other legs-elevatedoperations.
January, 2016

SeaSoft Systems
Phone: (805) 683-3002 9 Fax: (805) 683-0440
Volume 3: Semisim
Semisim is a six degree-of-freedom wave-frequencymotions program for use with semi-submersible vesselsin the non-transit, hulls-submerged mode. Computedresponse characteristics reflect the highly nonlinearnature of motion damping and excitation for this type ofvessel. Features include efficient input of column andhull forms based on the use of simple geometricalshapes, permitting quick specification and easymodification of the underwater configuration for com-parative performance analysis and evaluation. A widerange of environmental conditions is accommodated,including extensive built-in wave spectral types, azi-muthal spreading of wave directions and an optionalindependent background swell. The program providesfor calculation of air gap clearances between deck andwater surface in addition to absolute displacements,velocities and accelerations at any point on the vessel.Effects of finite water depth are fully accommodatedand either English or metric units may be selected forvessel specification and data output. Output is in theform of amplitude and phase of vessel Response Ampli-tude Operators (RAOs) and/or statistical characteriza-tions of vessel response to irregular wave conditions.Analysis is carried out in the frequency domain, result-ing in short execution times and unambiguous predic-tions of statistical response values.
Volume 4: Discsim
Discsim is a comprehensive 6 degree-of-freedomwave-frequency motion program for the special case ofazimuthal hull symmetry. This program is thus suitedfor analysis of buoy motions and loads in single-pointmooring applications and for round vessel geometriesoften associated with operations in the presence ofpersistent ice. Discsim utilizes an efficient algorithm forcalculation of wave-frequency forces and momentswhich permits accurate modeling using as input onlygross hydrostatic and mass properties (metacentricheights, displacements, overall dimensions, centers ofgravity, gyradii, etc.), eliminating the need for tediousand error-prone input of vessel lines details. Thistypically permits comprehensive analyses to becompleted in one hour or less. A wide range of environ-mental conditions is accommodated, including exten-sive built-in wave spectral types, azimuthal spreadingof wave directions and an optional independent back-ground swell. Accelerations, velocities and displace-ments at any point on the vessel can be computed.Effects of finite water depth are fully modeled and eitherEnglish or metric units may be selected for vesselspecification and data output. Output is in the form ofamplitude and phase of vessel Response AmplitudeOperators (RAOs) and/or statistical characterizationsof vessel response to irregular wave conditions.Analysis is carried out in the frequency domain, result-ing in short execution times and unambiguous predic-tions of statistical response values.
CLNB CLNB
January, 2016

SeaSoft Systems
Phone: (805) 683-3002 10 Fax: (805) 683-0440
Statmoor is a first-generation comprehensive staticmooring analysis program used for calculation of lateralrestoring characteristics of multileg catenary mooringsystems. The program is used in design and analysis ofcomplex single-vessel multi-point mooring systemsand special applications including static response char-acteristics of most elasto-gravitational lines of impor-tance to the offshore industry (towlines, reinforcedcoflex-type hoses, etc.). Analytically exact solutions tothe elasto-gravitational static response of mooring lineelements are employed; these exact equations apply toarbitrary degrees of nonlinearity in the tension-elonga-tion characteristics for the mooring line elements, per-mitting analysis of strongly non-linear materials such asnylon and polypropylene. Extensive on-line defaultvalues for weight, strength and elastic properties of steeland synthetic mooring materials are provided to en-hance efficiency in preliminary parametric design stud-ies. The program supports clumped weights, surface-resident spring buoys and azimuth-dependent slopingseafloor conditions. Output capabilities include indi-vidual line characteristics and net restoring forces andmoments associated with yaw offsets or lateral offsets inany direction. Either fairlead pretensions, pretensionline angles or horizontal distances to anchors may bespecified for a given length of deployed line.
In developing Statmoor, special attention was givento deficiencies in the treatment of mooring elementelasticity by widely used static mooring codes. In somecases, commonly-employed approximations to elasticresponse can result in errors as great as 100% in pre-dicted line loads and mooring forces.
Volume 7: Statmoor Volume 8: Catsim
Catsim is a second-generation comprehensive staticmooring analysis program for multileg catenary moor-ing systems. Catsim's strengths include the ability toaccommodate the latest generation of complexdeepwater mooring systems and the ability to computeline tension variations for arbitrary quasi-static mo-tions, including rotational offsets about any oblique axisand translational offsets in any direction. These capa-bilities are used, in particular, for ruptured-hull damageanalysis of moored vessels and for a new class ofmultileg mooring buoys with variable vertical position-ing capabilities. Catsim shares with Statmoor the exactsolution to the elasto-gravitational static response ofmooring line elements, permitting analysis of stronglynonlinear materials such as nylon and polypropylene.Extensive on-line default values for weight, strengthand elastic properties of steel and synthetic mooringmaterials are provided to enhance efficiency in prelimi-nary parametric design studies. Catsim supportssurface and submerged buoys, clumped weights andindividually specifiable anchor depths, but not slopingbottom conditions. Output capabilities include bothindividual line characteristics and net restoring forcesand moments associated with rotational offsets aboutany oblique axis or translational offsets in any direction.Automatic evaluation of the force-moment equilibriumconfiguration associated with user-specified externalforces and moments acting in conjunction withhydrostatic and mooring forces and moments is a built-in option.
January, 2016

SeaSoft Systems
Phone: (805) 683-3002 11 Fax: (805) 683-0440
Slowsim is used for computing static and low-fre-quency heading-dependent vessel forces and momentsarising from wind, current and wave drift action for avariety of vessel types and configurations. These com-putations comprise a normal subset of calculations re-quired for comprehensive programs such as Moorsim,SPMsim, Towsim, CALMsim, SALMsim and TLPsim,and are used to estimate the environmentally-associated mean position and low-frequency motionamplitudes of vessels in these programs. A built-inselection of standard vessel types including barges,VLCC and ULCC tankers, semisubmersibles and azi-muthally-symmetric vessels are accommodated forrapid estimation of environmental vessel loads on thesevessel types. In addition, a built-in help facility is avail-able online to estimate average vessel characteristicssuch as windage areas, hydrostatic and mass propertiesfor seagoing tanker-type vessels.
Towsim is a comprehensive analysis program usedfor design, evaluation, maintenance and failure analysisof simple or composite towlines used in open-ocean tug-barge-towline systems. It provides detailed towlineand vessel performance data under arbitrary waterdepth and environmental conditions, including charac-teristic (r.m.s.) and peak towline loads in the forecastmaximum storm for a particular route. The analysis canbe used to optimize towline characteristics in trip plan-ning for a specific route/environment and is suitable foron-board real-time use in an advisory capacity for set-ting optimal towline scope and/or optimal tug headingduring storm penetration or survival preparations.Characteristics of the towline, including mass, hydro-dynamic and elastic properties of each element of amulti-element towline, are fully specifiable. Tug-barge-towline systems are characterized by extreme nonlin-earities at every phase of performance analysis;Towsim fully accommodates these nonlinearities at alllevels, including system statics, quasi-statics (low-fre-quency oscillations, produced by variable wind andwave-drifting forces, with typical periods of oscillationof one to ten minutes) and dynamics (wave-inducedoscillations with typical periods of 4 to 30 seconds).Direct comparison of Towsim’s nonlinear dynamicload calculation with the quasi-static catenary calcula-tion often used as an approximation is provided as anoutput option. Analysis is carried out in the frequencydomain, resulting in short execution times and unambi-guous predictions of statistical response values.
Current
WindWaves
Line of Mean Turret Offsetand Average Surge Direction
Mean Current Force
Mean Wind Force
Mean Wave Force Net MeanEnvironmental Force
Volume 9: Slowsim Volume 10: Towsim
January, 2016
SeaSoft Systems
Phone: (805) 683-3002 12 Fax: (805) 683-0440
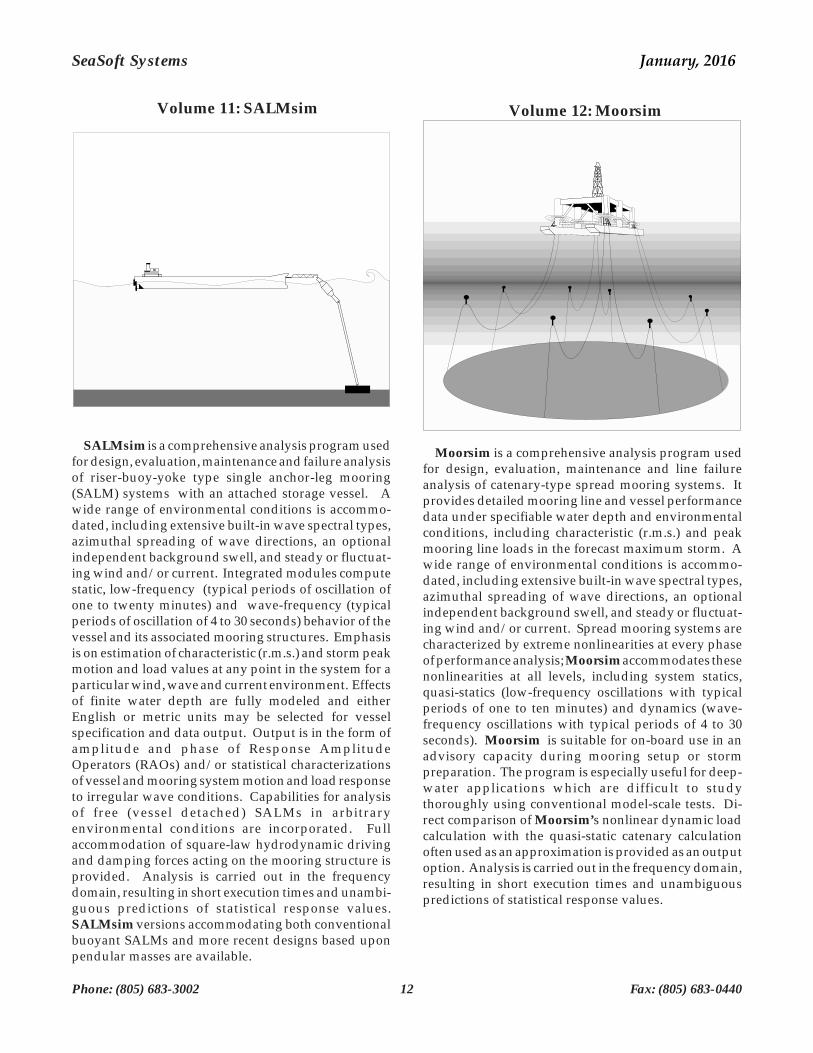
Volume 12: Moorsim
Moorsim is a comprehensive analysis program usedfor design, evaluation, maintenance and line failureanalysis of catenary-type spread mooring systems. Itprovides detailed mooring line and vessel performancedata under specifiable water depth and environmentalconditions, including characteristic (r.m.s.) and peakmooring line loads in the forecast maximum storm. Awide range of environmental conditions is accommo-dated, including extensive built-in wave spectral types,azimuthal spreading of wave directions, an optionalindependent background swell, and steady or fluctuat-ing wind and/or current. Spread mooring systems arecharacterized by extreme nonlinearities at every phaseof performance analysis; Moorsim accommodates thesenonlinearities at all levels, including system statics,quasi-statics (low-frequency oscillations with typicalperiods of one to ten minutes) and dynamics (wave-frequency oscillations with typical periods of 4 to 30seconds). Moorsim is suitable for on-board use in anadvisory capacity during mooring setup or stormpreparation. The program is especially useful for deep-water applications which are difficult to studythoroughly using conventional model-scale tests. Di-rect comparison of Moorsim’s nonlinear dynamic loadcalculation with the quasi-static catenary calculationoften used as an approximation is provided as an outputoption. Analysis is carried out in the frequency domain,resulting in short execution times and unambiguouspredictions of statistical response values.
Volume 11: SALMsim
SALMsim is a comprehensive analysis program usedfor design, evaluation, maintenance and failure analysisof riser-buoy-yoke type single anchor-leg mooring(SALM) systems with an attached storage vessel. Awide range of environmental conditions is accommo-dated, including extensive built-in wave spectral types,azimuthal spreading of wave directions, an optionalindependent background swell, and steady or fluctuat-ing wind and/or current. Integrated modules computestatic, low-frequency (typical periods of oscillation ofone to twenty minutes) and wave-frequency (typicalperiods of oscillation of 4 to 30 seconds) behavior of thevessel and its associated mooring structures. Emphasisis on estimation of characteristic (r.m.s.) and storm peakmotion and load values at any point in the system for aparticular wind, wave and current environment. Effectsof finite water depth are fully modeled and eitherEnglish or metric units may be selected for vesselspecification and data output. Output is in the form ofamplitude and phase of Response AmplitudeOperators (RAOs) and/or statistical characterizationsof vessel and mooring system motion and load responseto irregular wave conditions. Capabilities for analysisof free (vessel detached) SALMs in arbitraryenvironmental conditions are incorporated. Fullaccommodation of square-law hydrodynamic drivingand damping forces acting on the mooring structure isprovided. Analysis is carried out in the frequencydomain, resulting in short execution times and unambi-guous predictions of statistical response values.SALMsim versions accommodating both conventionalbuoyant SALMs and more recent designs based uponpendular masses are available.
January, 2016

SeaSoft Systems
Phone: (805) 683-3002 13 Fax: (805) 683-0440
Volume 13: CALMsimVolume 14: TLPsim
CALMsim is a comprehensive analysis program usedfor design, evaluation, maintenance and failure analysisof catenary anchor-leg mooring (CALM) systems.These systems comprise a storage vessel attached bymeans of a hawser or a rigid, articulated yoke assemblyto a large catenary-moored surface buoy. It providesdetailed mooring line and vessel performance dataunder specifiable water depth and environmentalconditions, including characteristic (r.m.s.) and peaksystem loads in the forecast maximum storm. A widerange of environmental conditions is accommodated,including extensive built-in wave spectral types,azimuthal spreading of wave directions, an optionalindependent background swell, and steady orfluctuating wind and/or current. CALM mooringsystems are characterized by extreme nonlinearities atevery phase of performance analysis; CALMsimaccommodates these nonlinearities at all levels,including system statics, quasi-statics (low-frequencyoscillations with typical periods of one to ten minutes)and dynamics (wave-frequency oscillations withtypical periods of 4 to 30 seconds). Direct comparison ofCALMsim’s nonlinear dynamic load calculation withthe quasi-static catenary calculation often used as anapproximation is provided as an output option.Analysis is carried out in the frequency domain, result-ing in short execution times and unambiguous predic-tions of statistical response values.
TLPsim is a comprehensive analysis program usedfor design, evaluation, maintenance and failure analysisof Tension Leg Platform (TLP) systems. It providesdetailed tendon and platform performance data underspecifiable water depth and environmental conditions,including characteristic (r.m.s.) and peak tendon loadsin the forecast maximum storm. A wide range of envi-ronmental conditions is accommodated, including ex-tensive built-in wave spectral types, azimuthal spread-ing of wave directions, an optional independent back-ground swell, and steady or fluctuating wind and/orcurrent. The program is especially useful for deep-water applications which are difficult to study thor-oughly using conventional model-scale tests. Analysisis carried out in the frequency domain, resulting in shortexecution times and unambiguous predictions ofstatistical response values.
January, 2016

SeaSoft Systems
Phone: (805) 683-3002 14 Fax: (805) 683-0440
Volume 15: SPMsim
SPMsim is a comprehensive analysis program usedfor design, evaluation, maintenance and failure analysisof catenary-based single-point mooring (SPM) systems,including vessel-fixed turret systems. It provides de-tailed mooring system and vessel performance dataunder specifiable water depth and environmental con-ditions, including characteristic (r.m.s.) and peak moor-ing line loads in the forecast maximum storm. A widerange of environmental conditions is accommodated,including extensive built-in wave spectral types, azi-muthal spreading of wave directions, an optional inde-pendent background swell, and steady or fluctuatingwind and/or current. Catenary-based mooring sys-tems are characterized by extreme nonlinearities at ev-ery phase of performance analysis; SPMsim accom-modates these nonlinearities at all levels, includingsystem statics, quasi-statics (low-frequency oscillationswith typical periods of one to ten minutes) and dynam-ics (wave-frequency oscillations with typical periods of4 to 30 seconds). The program is especially useful fordeep-water applications which are difficult to studythoroughly using conventional model-scale tests. Di-rect comparison of SPMsim’s nonlinear dynamic loadcalculation with the quasi-static catenary calculationoften used as an approximation is provided as an outputoption. Analysis is carried out in the frequency domain,resulting in short execution times and unambiguouspredictions of statistical response values.
Volume 16: Sparsim
Sparsim is a comprehensive analysis program usedfor design, evaluation, maintenance and failure analysisof moored, deep-draft caisson-style offshoredevelopment and production systems. These systemscomprise a massive spar-shaped vessel, usuallypositioned with a more-or-less conventional tautcatenary mooring system. The program providesdetailed mooring line and vessel performance dataunder specifiable water depth and environmentalconditions, including characteristic (r.m.s.) and peaksystem loads in the forecast maximum storm. A widerange of environmental conditions is accommodated,including extensive built-in wave spectral types,azimuthal spreading of wave directions, an optionalindependent background swell, and steady orfluctuating wind and/or current. These systems arecharacterized by extreme nonlinearities at every phaseof performance analysis; Sparsim accommodates thesenonlinearities at all levels, including system statics,quasi-statics and dynamics. Analysis is carried out inthe frequency domain, resulting in short executiontimes and unambiguous predictions of statisticalresponse values.
January, 2016