intro to inertial elecia white logical elegance, inc. embedded.fm @logicalelegance
TRANSCRIPT

Intro to Inertial
Elecia White
Logical Elegance, Inc.
Embedded.fm
@logicalelegance
Plans
60%: Accelerometer, gyro, magnetometer
30% Navigation is hard 15% Kalman filters, quaternions are
awesome 10% Calibration is expensive 8% Summary of sensors,
applications, costs
You are here.
Intro to Inertial Sensors

Sensors
Accelerometers
Gyros
Magnetometers

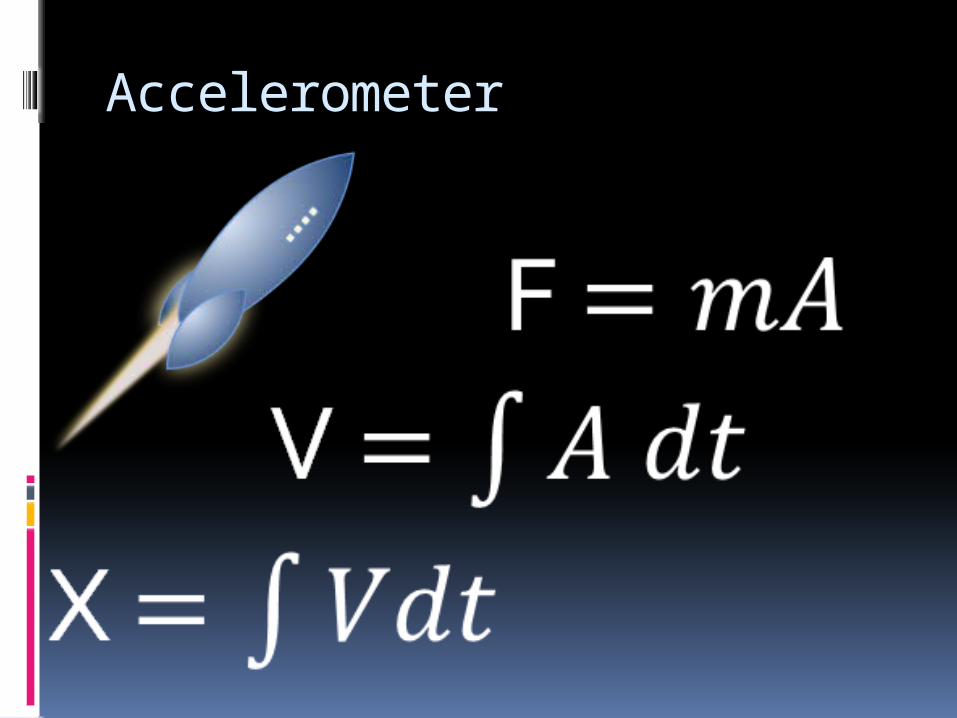
Accelerometer
F V
X

Accelerometer
Sensors
Accelerometers measure gravity
Gyros
Magnetometers

Gyros
Gyros Angular Rate Sensors

Sensors
Accelerometers measure gravity
Gyros Angular rate sensors measure spinniness
Magnetometers

Magnetometer
Sensors
Accelerometers measure gravity
Gyros Angular rate sensors measure spinniness
Magnetometers measure north and magnets
Midpoint Quiz!
Stickers! Books! Win now!
Exclamation points are free!!

Axis

Axis

Look! Pretty lights!
Accelerometers measure gravity (apples)
Gyros Angular rate sensors measure spinniness (gestures)
Magnetometers measure north and magnets (compass)

Where am I?
Navigation is hard
Accelerometer
F V
X
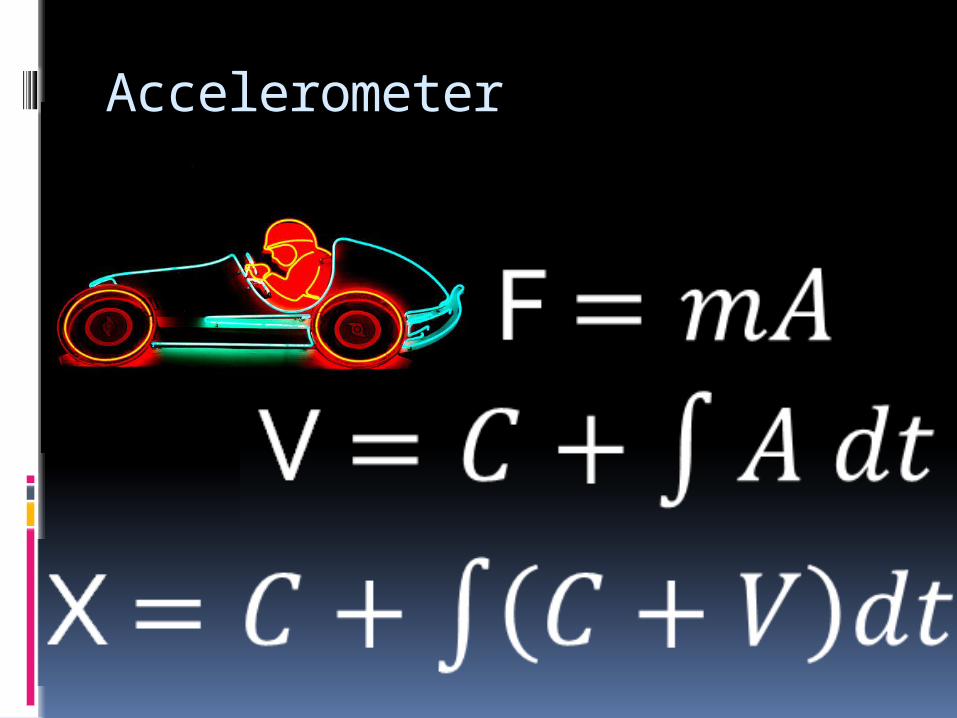
F V
X
Accelerometer

Kidnapped and Blindfolded

Position Calculation
𝑋𝑎=𝑒𝑟𝑟𝑜𝑟𝑠𝑎+∫∫ 𝐴𝑑𝑡𝑋𝑔=𝑒𝑟𝑟𝑜𝑟𝑠𝑔+∫𝐺𝑑𝑡
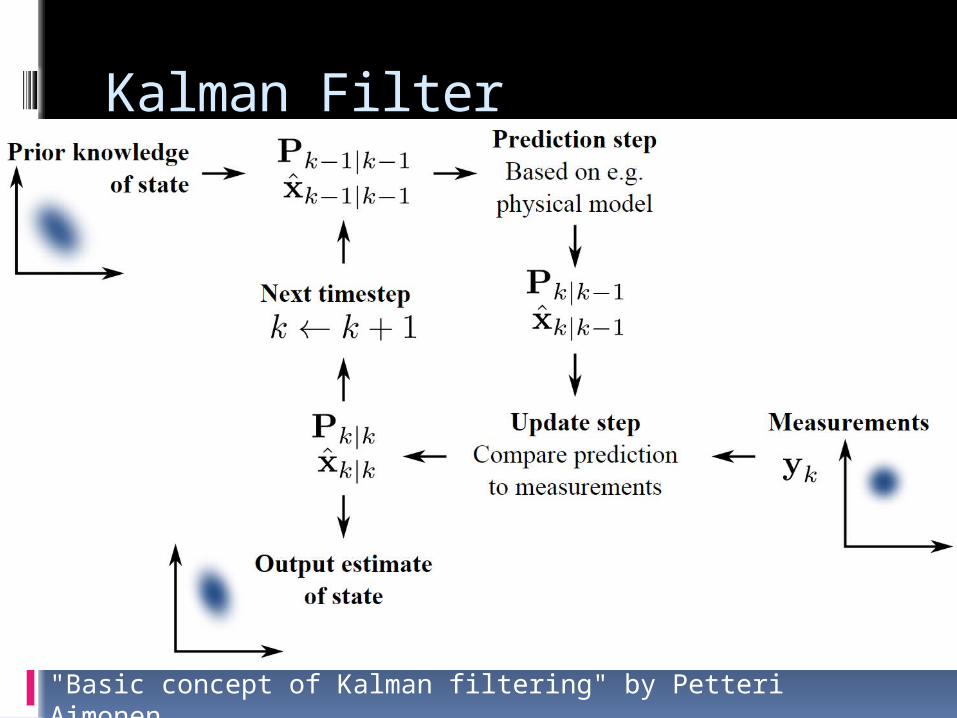
Kalman Filter
"Basic concept of Kalman filtering" by Petteri Aimonen

Kalman Filter

I <heart> Quaternions

I <heart> Quaternions
http://en.wikipedia.org/wiki/Conversion_between_quaternions_and_Euler_angles

Calculate heading
https://github.com/adafruit/Adafruit_9DOF/blob/master/Adafruit_9DOF.cpp

Calculate heading: A+M
https://github.com/adafruit/Adafruit_9DOF/blob/master/Adafruit_9DOF.cpp

Navigation remains difficult.
Tactical Considerations
All sensors are temperature sensors, some measure other things as well.
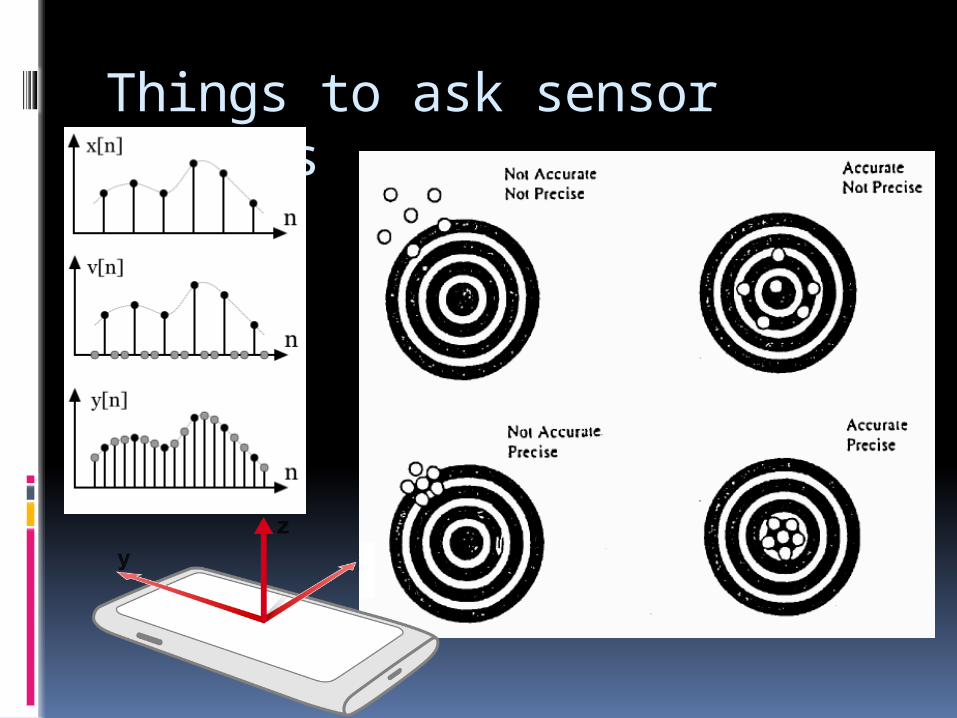
Things to ask sensor vendors

Acronymic Combinations
A+G = Vertical gyro, A+M = Tilt compensated compass A+G+M = Attitude heading reference (AHRS) A+G+M+GPS = Fusion navigation solution
IMU, IMU with nav library 9DOF – accel + gyro + mag 10DOF – barometric and/or temperature
Barometric is for altitude but only good for relative measurements

Cost comparison
Prices change pretty rapidly Not recommendations, not exact
Sensor Specific Price Board
Price (1kq)
Accel MMA8451ADXL345
$8 (Adafruit)$18
$1.20$4.70
Gyro(Rate)
L3GD20HMAX21000
$13 $3.18$2.92
Mag HMC5883LMAG3110
$10$15
$1.55$0.78
IMU L3GD20H+LM303LSM9DS0 MPU-9150**
$20$20$35
$3.18 + 1.76 $5.32$7.12

Links and books
Embedded.fm episodes: 9 (Kidnapped and
Blindfolded) 43 (A Lot of High-Falutin’
Math) Adafruit 9DOF code (
github) Hackaday.io/elecia for
North Star IMU light example

Elecia White @logicalelegance
Thank you! Questions?