intervalelor de timp - comm.pub.roarusu/mee2/prezentari curs... · măsurări în electronică şi...
TRANSCRIPT
Măsurarea frecvenţelor şi a intervalelor de timp
1. Numărătorul universal
Măsurări Electrice şi Electronice 2

Măsurări în Electronică şi Telecomunicaţii
Principiul de măsură al numărătorului universal
Măsurarea numerică a frecvenţelor sau perioadelor se face printr-o metodă de comparaţie.
Aparatul de măsură folosit se numeşte numărător universal şi permite, în funcţie de configuraţie, măsurarea frecvenţelor, a perioadelor, a intervalelor de timp, a rapoartelor de frecvenţe.

Măsurări în Electronică şi Telecomunicaţii
Principiul de măsură al numărătorului universal
N = t2/T1 = f1t2
N =M f1t2

Măsurări în Electronică şi Telecomunicaţii
Principiul de măsură al numărătorului universal
Această schemă poate fi folosită pentru măsurări variate, în funcţie de alegerea f1 , t2 :
dacă f1 = fx (necunoscut) şi t2 = TB (cunoscut), atunci N =fxTB adică numărul din numărător este proporţional cu frecvenţa semnalului, aceasta putând fi măsurată direct - configuraţia frecvenţmetru
dacă t2 =Tx (necunoscut) şi f1 = fB (cunoscut), atunci N =TxfB adică numărul din numărător este proporţional cu perioada semnalului - configuraţia periodmetru
alte posibilităţi, de exemplu raport de frecvenţe, etc.

Măsurări în Electronică şi Telecomunicaţii
Configuraţia “frecvenţmetru”
CI - Circuitul de intrare
Primeşte la intrare un semnal de orice formă şi amplitudine pe care îl transformă într-un semnal dreptunghiular de aceeaşi frecvenţă şi de nivel compatibil cu circuitele logice.

Măsurări în Electronică şi Telecomunicaţii
Configuraţia “frecvenţmetru”
De exemplu: un semnal de intrare (de formă sinusoidală) convertit de către CI într-un semnal dreptunghiular.
Conversia se face la intersecţia semnalului cu cele 2 praguri UP+, UP-
Măsurări în Electronică şi Telecomunicaţii
Configuraţia “frecvenţmetru”
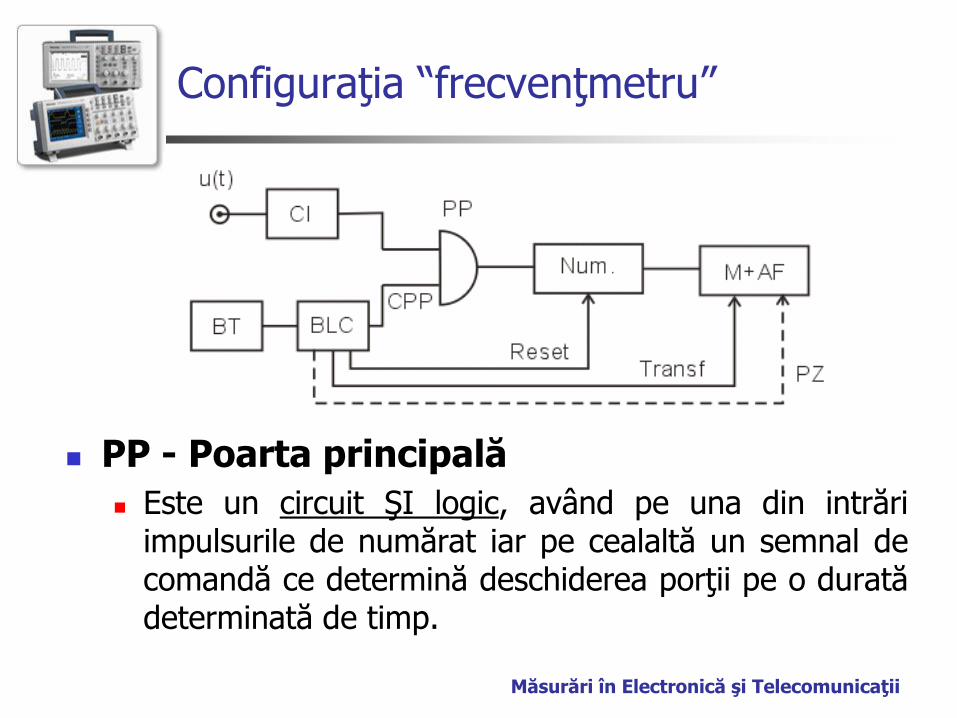
PP - Poarta principală
Este un circuit ŞI logic, având pe una din intrări impulsurile de numărat iar pe cealaltă un semnal de comandă ce determină deschiderea porţii pe o durată determinată de timp.
Măsurări în Electronică şi Telecomunicaţii
Configuraţia “frecvenţmetru”
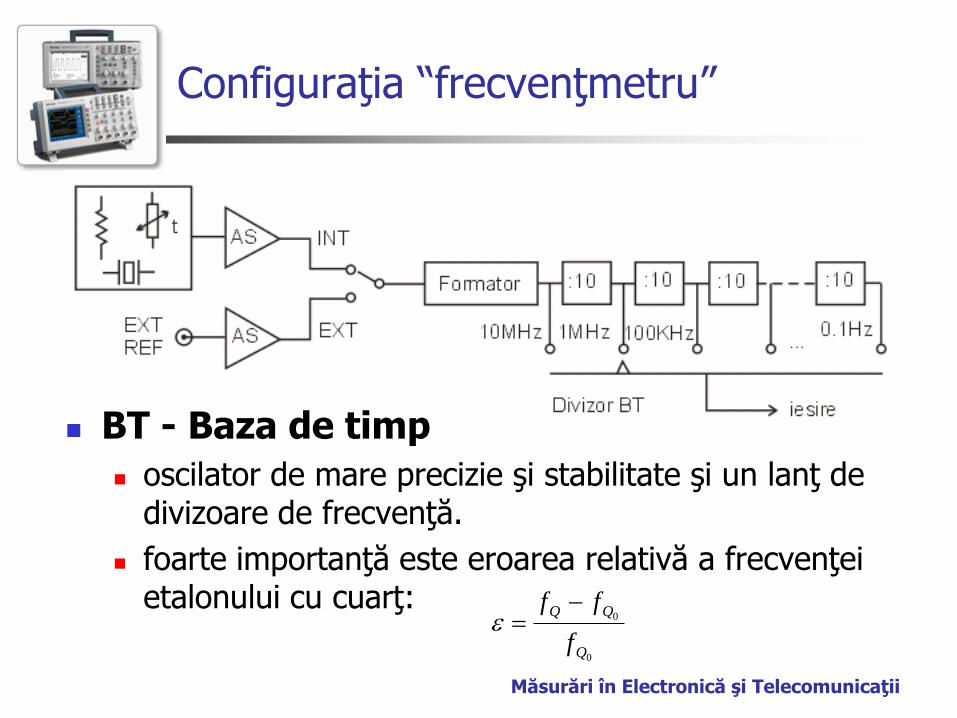
BT - Baza de timp
oscilator de mare precizie şi stabilitate şi un lanţ de divizoare de frecvenţă.
foarte importanţă este eroarea relativă a frecvenţei etalonului cu cuarţ:
0
0
Q
f
ff
Măsurări în Electronică şi Telecomunicaţii
Configuraţia “frecvenţmetru”
Precizia frecvenţei oscilatorului cu cuarţ este influenţată de mai mulţi factori:
temperatură;
variaţia tensiunii de alimentare;
îmbătrânire (stabilitatea pe termen lung);
câmpuri magnetice;
câmpuri gravitaţionale;
vibraţii, umiditate etc.
Măsurări în Electronică şi Telecomunicaţii
Configuraţia “frecvenţmetru”
BLC - Blocul logic de control
Furnizează semnale de comandă pentru diversele părţi componente astfel încât aparatul să îndeplinească funcţiunea dorită.
Principalele funcţiuni ale acestui bloc sunt:
generează semnalul de comandă a porţii principale TCPP, de lungime egală cu perioada bazei de timp selectate
comandă transferul conţinutului numărătorului in memorie, la sfârşitul unui ciclu de măsură, şi resetează numărătorul;
comandă timpul de reciclare, care reprezinta timpul in care semnalul CPP este inhibat (pauza intre 2 masuratori).
comandă afişarea unităţii de măsură: Hz, kHz, MHz şi poziţia punctului zecimal
Măsurări în Electronică şi Telecomunicaţii
Configuraţia “frecvenţmetru”
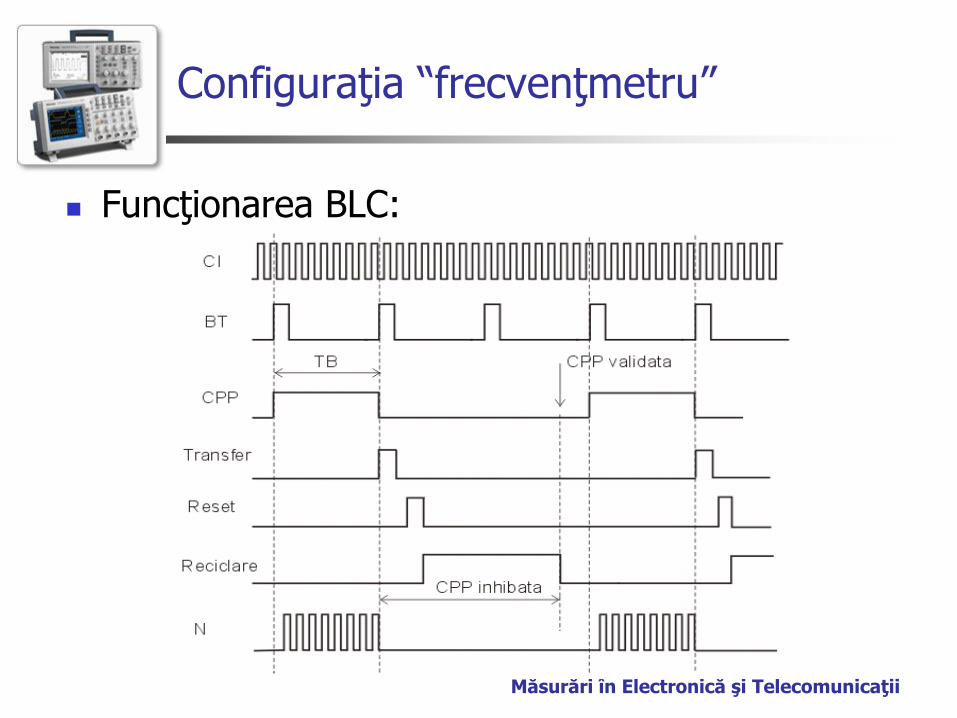
Funcţionarea BLC:

Măsurări în Electronică şi Telecomunicaţii
Configuraţia “frecvenţmetru”
Semnificaţia Nx şi poziţia punctului zecimal
Numărul din numărător va avea valoarea
prin urmare valoarea măsurată este
Rezoluţia (frecvenţa minimă măsurată) se obţine pentru valoarea minimă din numărător Nx=1, adică:
Bx B x
X
TN T f
T
xx
B
Nf
T
0
1x
B
fT
Măsurări în Electronică şi Telecomunicaţii
Configuraţia “frecvenţmetru”
Numărul din numărător nu poate fi decât întreg întrucât reprezintă numărul de impulsuri numărate (nu are sens numărarea unei fracţiuni de impuls).
Punctul zecimal PZ este aprins de BLC pe diferite poziţii în funcţie de durata TB şi unitatea de măsură cea mai comodă pentru utilizator.

Măsurări în Electronică şi Telecomunicaţii
Configuraţia “frecvenţmetru”
Să considerăm pentru TB valorile 0.1, 1 si 10s.
În tabel rezultă cu formula , poziţia PZ şi unitatea de măsură în care este afişat rezultatul.
TB Frecvenţa indicată Rezoluţia Poziţia PZ
TB= 10 s 0.1 Hz xxxxx.x (Hz)
TB = 1s 1 Hz xxxxxx (Hz)
TB = 0.1s 0.01 KHz xxxx.xx (KHz)
0.1 ( )x xf N Hz
( )x xf N Hz
10 ( )
0.01 ( )
x x
x
f N Hz
N KHz
/x x Bf N T
Măsurări în Electronică şi Telecomunicaţii
Erori în măsurarea frecvenţelor
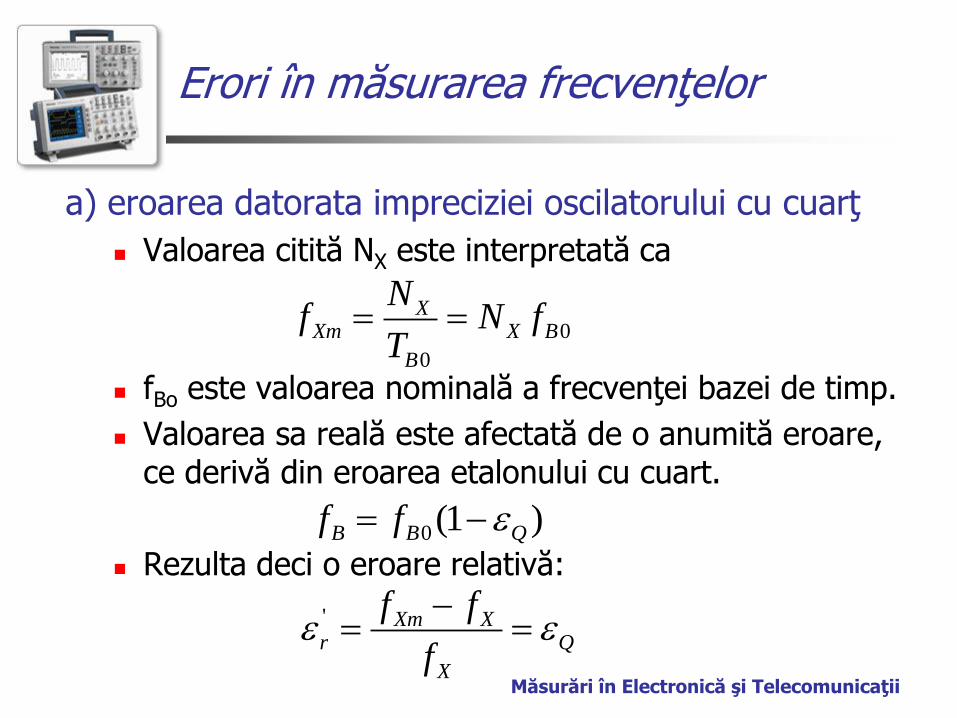
a) eroarea datorata impreciziei oscilatorului cu cuarţ
Valoarea citită NX este interpretată ca
fBo este valoarea nominală a frecvenţei bazei de timp.
Valoarea sa reală este afectată de o anumită eroare, ce derivă din eroarea etalonului cu cuart.
Rezulta deci o eroare relativă:
0
0
XXm X B
B
Nf N f
T
0(1 )B B Qf f
' Xm Xr Q
X
f f
f
Măsurări în Electronică şi Telecomunicaţii
Erori în măsurarea frecvenţelor
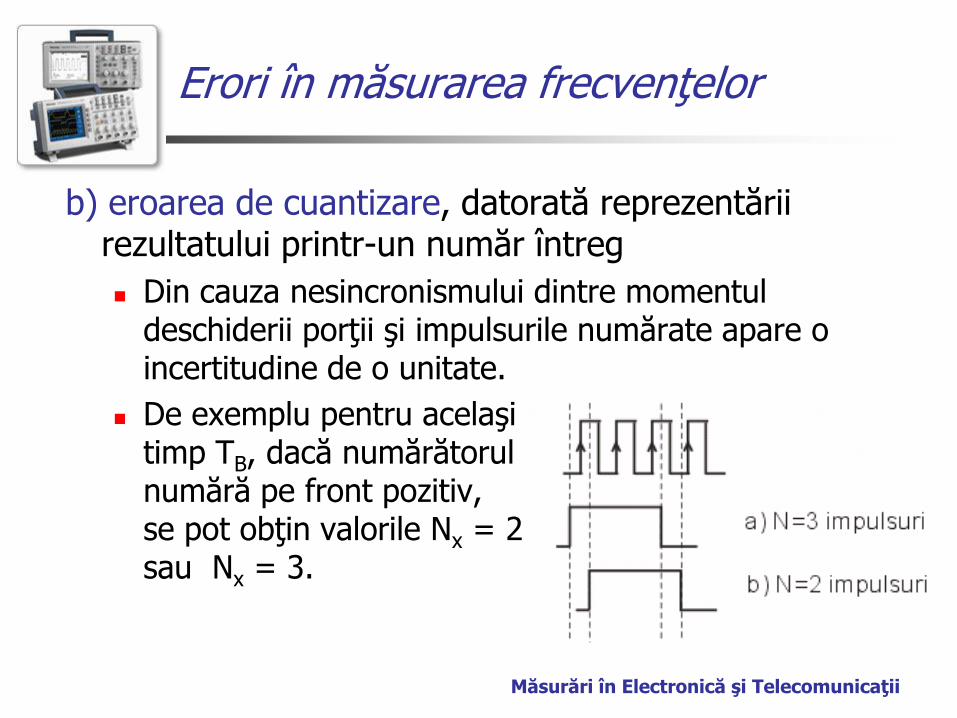
b) eroarea de cuantizare, datorată reprezentării rezultatului printr-un număr întreg
Din cauza nesincronismului dintre momentul deschiderii porţii şi impulsurile numărate apare o incertitudine de o unitate.
De exemplu pentru acelaşi timp TB, dacă numărătorul numără pe front pozitiv, se pot obţin valorile Nx = 2 sau Nx = 3.

Măsurări în Electronică şi Telecomunicaţii
Erori în măsurarea frecvenţelor
Sau, altfel spus, numărul măsurat NXm de impulsuri (întreg) poate varia cu o unitate de la o măsurătoare la alta. Eroarea relativă este:
De exemplu, putem calcula această eroare pentru TB=1s, respectiv 10s si pentru 2 valori ale frecventei fx: 1Hz si 10Hz.
( 1) 1Xm X X Xr
X X X
N N N N
N N N
1/
1N
x Bf T fx = 1Hz fx = 10Hz
TB=1s 1 0.1
TB=10s 0.1 0.01
Măsurări în Electronică şi Telecomunicaţii
Erori în măsurarea frecvenţelor
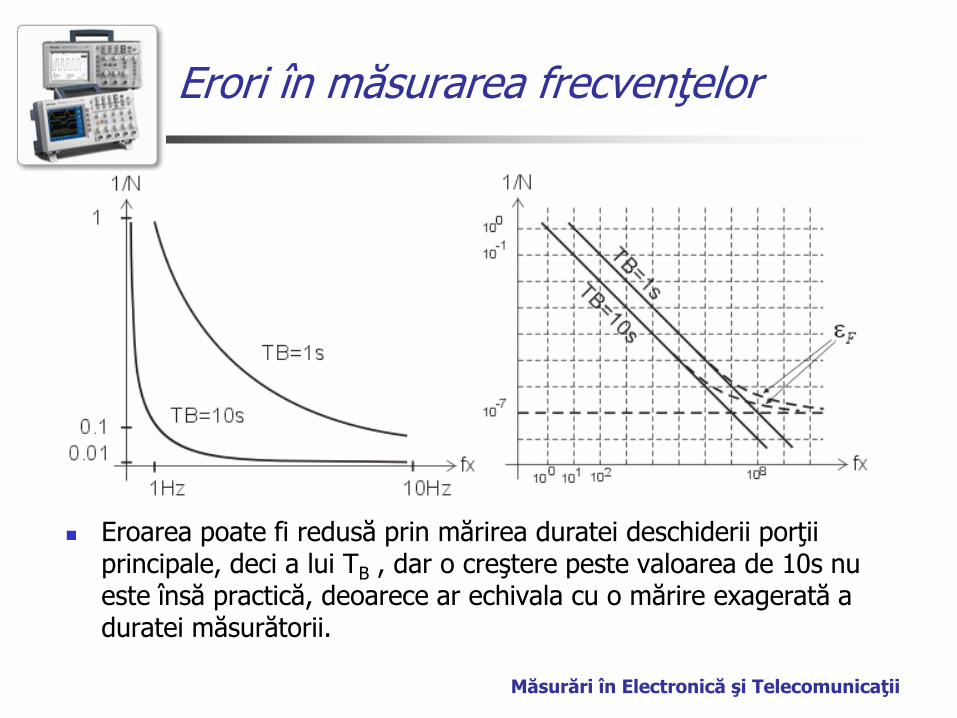
Eroarea poate fi redusă prin mărirea duratei deschiderii porţii principale, deci a lui TB , dar o creştere peste valoarea de 10s nu este însă practică, deoarece ar echivala cu o mărire exagerată a duratei măsurătorii.
Măsurări în Electronică şi Telecomunicaţii
Erori în măsurarea frecvenţelor
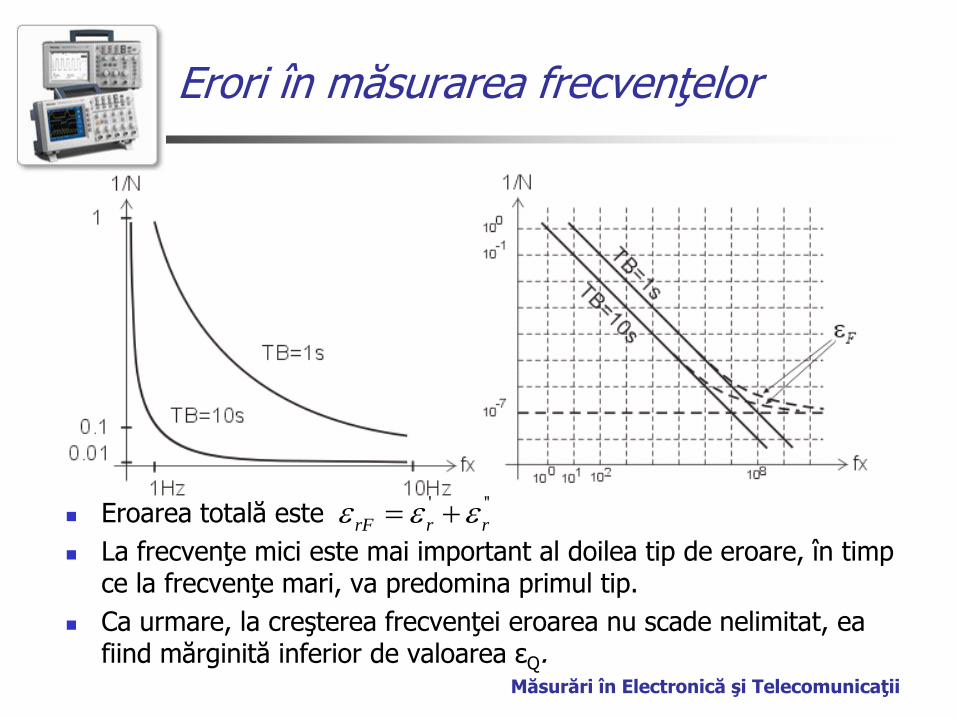
Eroarea totală este
La frecvenţe mici este mai important al doilea tip de eroare, în timp ce la frecvenţe mari, va predomina primul tip.
Ca urmare, la creşterea frecvenţei eroarea nu scade nelimitat, ea fiind mărginită inferior de valoarea εQ.
' ''
rF r r
Măsurări în Electronică şi Telecomunicaţii
Efectul zgomotului
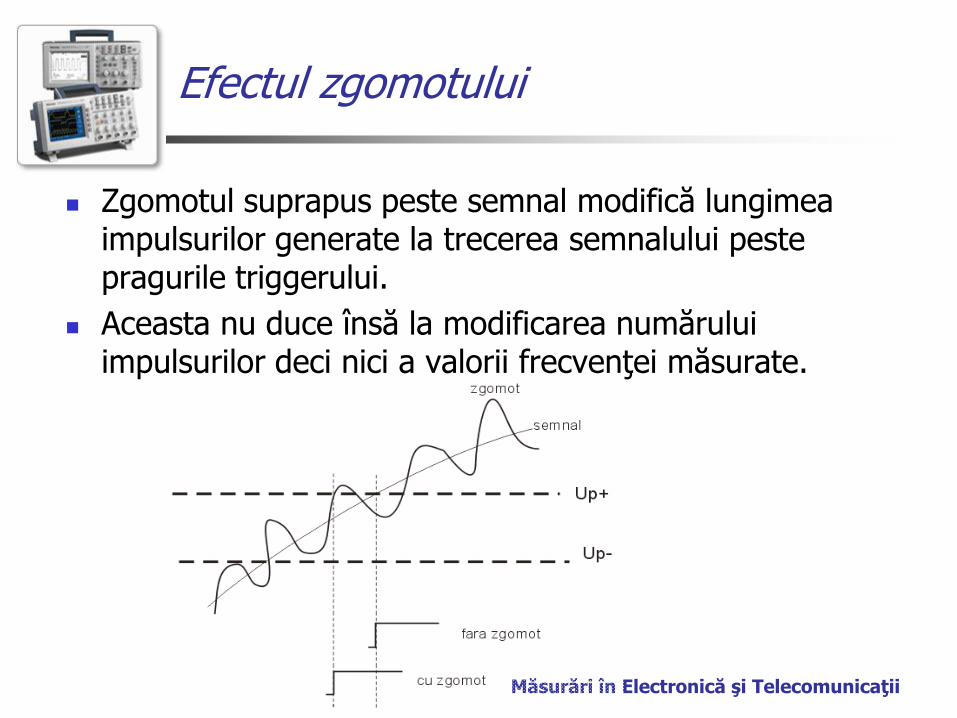
Zgomotul suprapus peste semnal modifică lungimea impulsurilor generate la trecerea semnalului peste pragurile triggerului.
Aceasta nu duce însă la modificarea numărului impulsurilor deci nici a valorii frecvenţei măsurate.

Măsurări în Electronică şi Telecomunicaţii
Efectul zgomotului
Dacă însă zgomotul depăşeşte, ca amplitudine vârf la vârf, fereastra triggerului el poate genera impulsuri suplimentare şi, în consecinţă, va conduce la erori

Măsurări în Electronică şi Telecomunicaţii
Alegerea nivelului triggerului
Exemplu. Măsurarea frecvenţei purtătoare a unui semnal la care amplitudinea variază in timp.
În cazul alegerii pragurilor în varianta UP1 instrumentul va indica o valoare mai mică decât cea corectă.
In varianta UP2, la fiecare perioadă a semnalului se generează câte un impuls, aşa încât se va măsura corect frecvenţa.

Măsurări în Electronică şi Telecomunicaţii
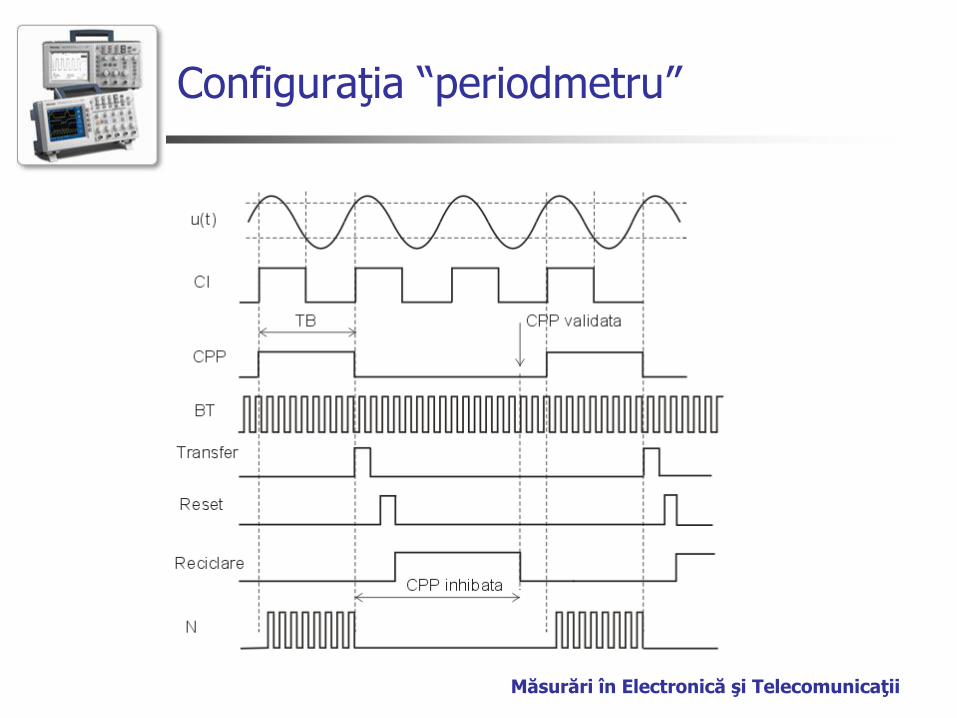
Configuraţia “periodmetru”
Principalele caracteristici ale acestei configuraţii sunt:
tactul numărătorului furnizat de baza de timp
perioade mici - frecvenţe mari la iesirea BT (începând cu fQ)
pentru fQ= 10 MHz TB poate fi 0.1,1,10,100 μs
CPP dat de circuitul de intrare
Tx - durata deschiderii porţii principale;

Măsurări în Electronică şi Telecomunicaţii
Configuraţia “periodmetru”
Se observă în schema bloc că se inversează poziţia BT cu CI faţă de configuraţia frecvenţmetru.
Măsurări în Electronică şi Telecomunicaţii
Configuraţia “periodmetru”

Măsurări în Electronică şi Telecomunicaţii
TB Perioada indicată Rezoluţia Poziţia PZ
TB= 0.1 μs 0.1 μs xxxxx.x (μs)
TB =1 μs 1 μs xxxxxx (μs)
TB = 10 μs 0.01 ms xxxx.xx (ms)
Configuraţia “periodmetru”
Semnificaţia Nx şi poziţia punctului zecimal
Rezoluţia măsurării perioadei se obţine pentru Nx=1 : Tx0 = TB, astfel încât rezoluţia optimă corespunde frecvenţei maxime din baza de timp.
xx x B x
B
TN T T N
T
0.1 (μs)x xT N
(μs)x xT N
10 (μs) 0.01 (ms)x x xT N N

Măsurări în Electronică şi Telecomunicaţii
Erori în configuraţia periodmetru
a) eroarea datorata impreciziei oscilatorului cu cuarţ
Valoarea măsurată este unde TB0 este valoarea nominală a perioadei bazei de timp.
In realitate:
deci: ε'r= εQ, similar cu configuraţia frecvenţmetru.
xm x BoT N T
0
0
(1 )Qx
xm B x x Q
B Q
fTT T T T
T f
Măsurări în Electronică şi Telecomunicaţii
Erori în configuraţia periodmetru
b) eroarea de cuantizare
Aceasta este tot de forma 1/N ca şi în configuraţia precedentă:
Se constată că în această configuraţie eroarea este proporţională cu frecvenţa semnalului şi are valoarea minimă când se lucrează cu frecvenţa maximă a bazei de timp.
1r BT x
X
T fN

Măsurări în Electronică şi Telecomunicaţii
Erori în configuraţia periodmetru
Să comparăm această eroare cu eroarea de acelaşi tip în cazul configuraţiei frecvenţmetru.
Vom numi frecvenţă critică frecvenţa pentru care
1rF
BF xT f
rF rT
1 1BT cr cr
BF cr BF BT
T f fT f T T
rT BT xT f
Măsurări în Electronică şi Telecomunicaţii
Erori în configuraţia periodmetru
Pentru o evaluare corectă, vom lua pentru fiecare caz perioada bazei de timp care conduce la eroarea minima, aşadar:
De exemplu, pentru un numărător universal la care TBT = 0.1μs, TBF = 10s, se obţine fcr= 1kHz.
Pentru f<fcr – periodmetru
Pentru f>fcr - frecvenţmetru.
max min
1cr
BF BT
fT T

Măsurări în Electronică şi Telecomunicaţii
Erori în configuraţia periodmetru
c) Erori de basculare a triggerului
Sunt cauzate de zgomotele suprapuse peste semnalul de intrare şi zgomotele cauzate de circuitele de intrare ale numărătorului.
Sunt erori aleatoare care se manifestă prin variaţii aleatoare ale momentelor de declanşare şi de revenire, conducând la o variaţie aleatoare a timpului de deschidere a PP.
Spre deosebire de configuraţia frecvenţmetru, putem evalua numeric această eroare deoarece se întâmplă doar de două ori în cadrul unei măsurări (la începutul şi la sfârşitul CPP).
Măsurări în Electronică şi Telecomunicaţii
Erori în configuraţia periodmetru
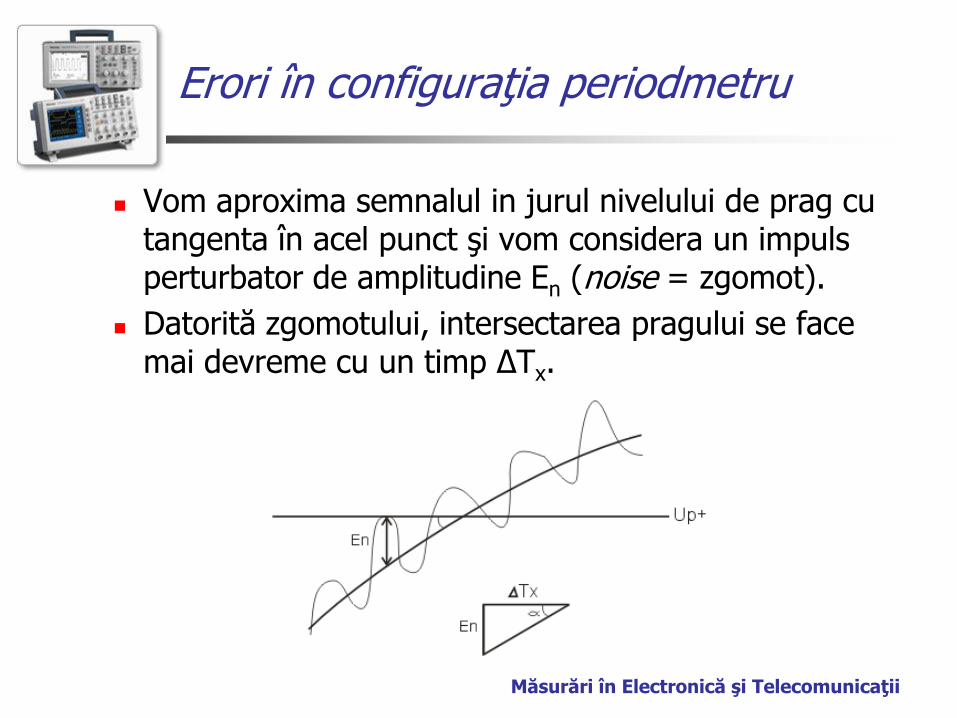
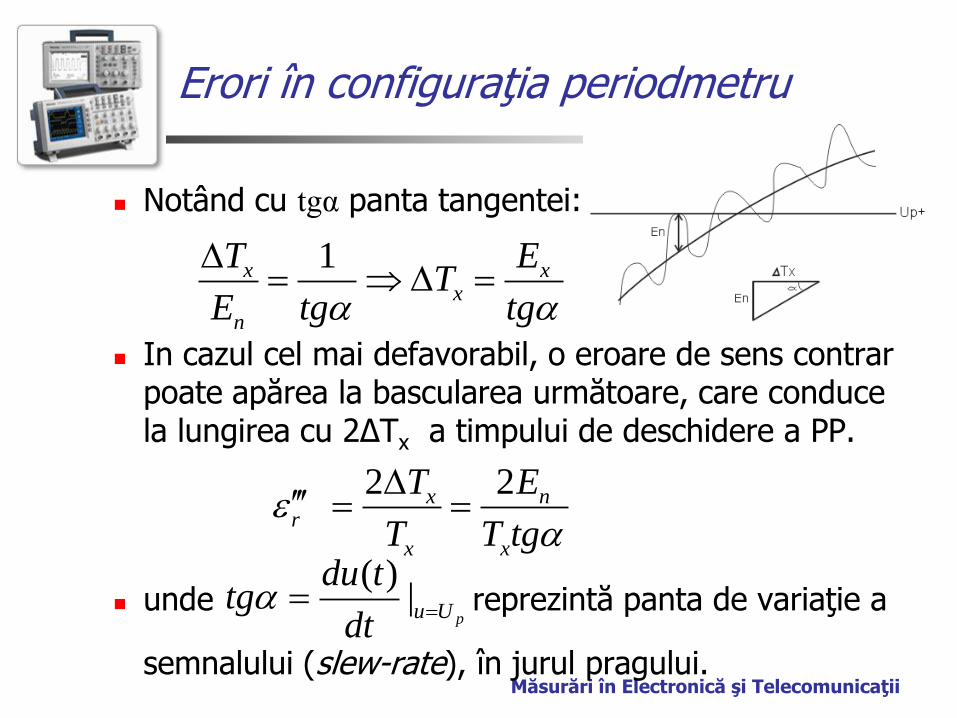
Vom aproxima semnalul in jurul nivelului de prag cu tangenta în acel punct şi vom considera un impuls perturbator de amplitudine En (noise = zgomot).
Datorită zgomotului, intersectarea pragului se face mai devreme cu un timp ΔTx.
Măsurări în Electronică şi Telecomunicaţii
Erori în configuraţia periodmetru
Notând cu tgα panta tangentei:
In cazul cel mai defavorabil, o eroare de sens contrar poate apărea la bascularea următoare, care conduce la lungirea cu 2ΔTx a timpului de deschidere a PP.
unde reprezintă panta de variaţie a
semnalului (slew-rate), în jurul pragului.
1x xx
n
T ET
E tg tg
2 2x nr
x x
T E
T T tg
( )|
pu U
du ttg
dt
Măsurări în Electronică şi Telecomunicaţii
Erori în configuraţia periodmetru
Evident, eroarea este cu atât mai mare cu cât panta este mai mică.
In cazul unui semnal sinusoidal
Panta maxima se obţine când semnalul trece prin zero:
( )( ) sin( ) cos( )
du tu t U t U t
dt
sin( ) 0 cos( ) 1t t
Măsurări în Electronică şi Telecomunicaţii
Erori în configuraţia periodmetru
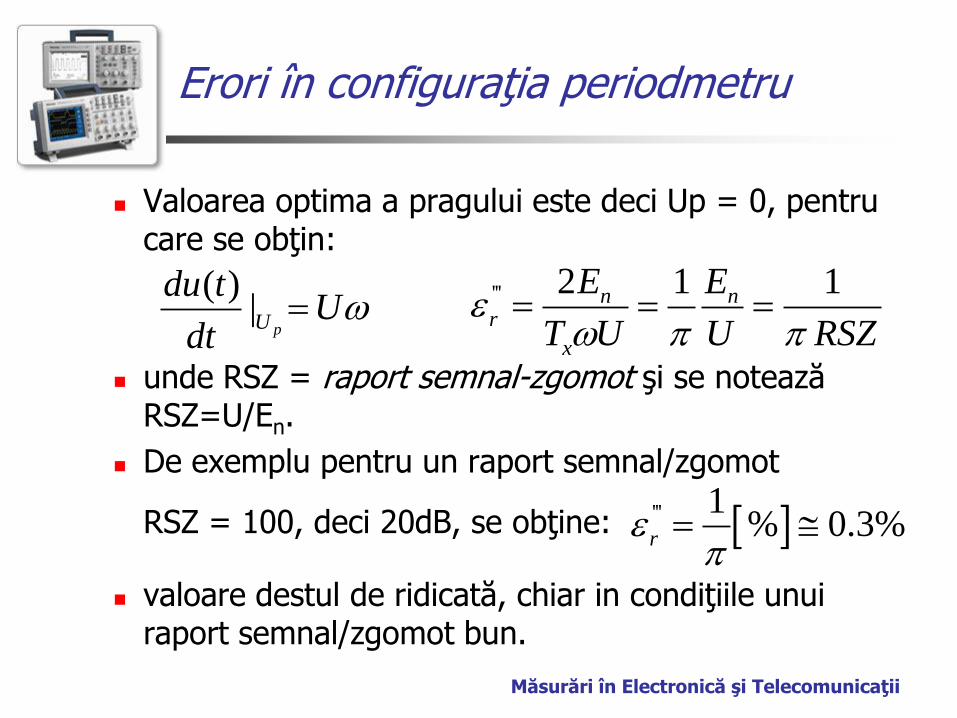
Valoarea optima a pragului este deci Up = 0, pentru care se obţin:
unde RSZ = raport semnal-zgomot şi se notează RSZ=U/En.
De exemplu pentru un raport semnal/zgomot
RSZ = 100, deci 20dB, se obţine:
valoare destul de ridicată, chiar in condiţiile unui raport semnal/zgomot bun.
( )|
pU
du tU
dt
''' 2 1 1n nr
x
E E
T U U RSZ
''' 1% 0.3%r

Măsurări în Electronică şi Telecomunicaţii
Măsurarea perioadelor multiple
Rezoluţia şi precizia se pot îmbunătăţi făcând măsurarea pe un număr mai mare (10 sau 100) de perioade.
Aceasta se face introducând un divizor de frecvenţă cu câteva decade între CI şi BCP, simultan cu mutarea punctului zecimal cu tot atâtea poziţii mai la stânga.
Ca urmare, pentru un factor de divizare 10k, se obţine TCPP = 10kTx
Măsurări în Electronică şi Telecomunicaţii
Măsurarea perioadelor multiple
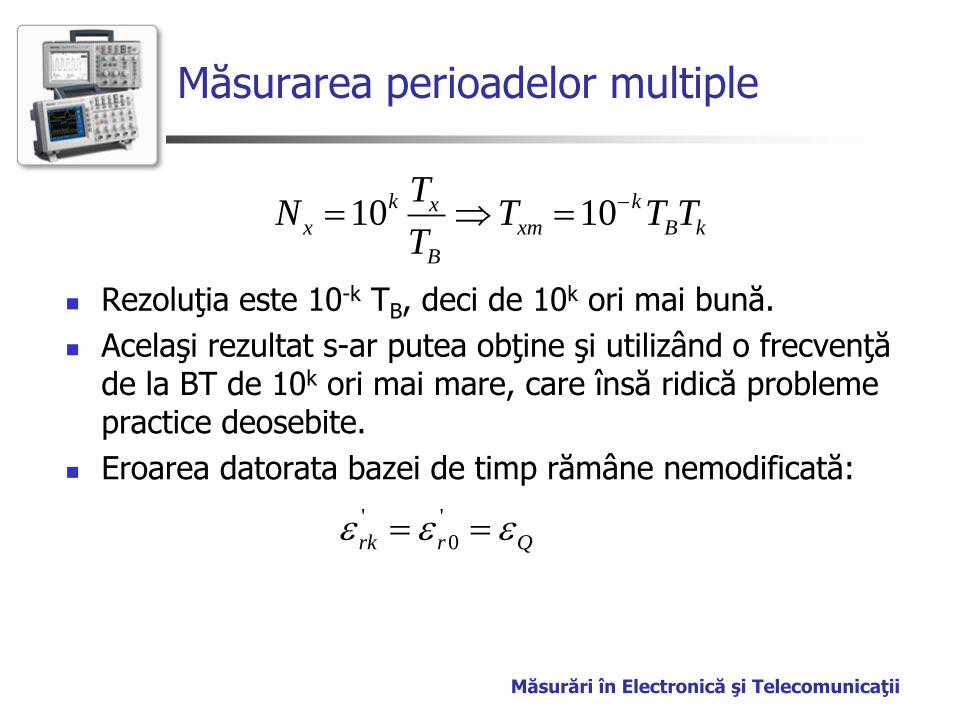
Rezoluţia este 10-k TB, deci de 10k ori mai bună.
Acelaşi rezultat s-ar putea obţine şi utilizând o frecvenţă de la BT de 10k ori mai mare, care însă ridică probleme practice deosebite.
Eroarea datorata bazei de timp rămâne nemodificată:
10 10k kxx xm B k
B
TN T T T
T
' '
0rk r Q

Măsurări în Electronică şi Telecomunicaţii
Măsurarea perioadelor multiple
Eroarea de cuantizare va fi:
deci se reduce de 10k ori.
Eroarea datorata 2ΔTx, dar pentru 10k.Tx:
Prin urmare, eroarea totală este
Mărirea lui k conduce la creşterea timpului de măsură.
'' ''
0
110
10
kB xrk rk
x
T f
N
''' '''
0
210
10
kxrk rk
x
T
T
'' '''
0 010 k
rk Q r r
Măsurări în Electronică şi Telecomunicaţii
Măsurarea raportului a două frecvenţe
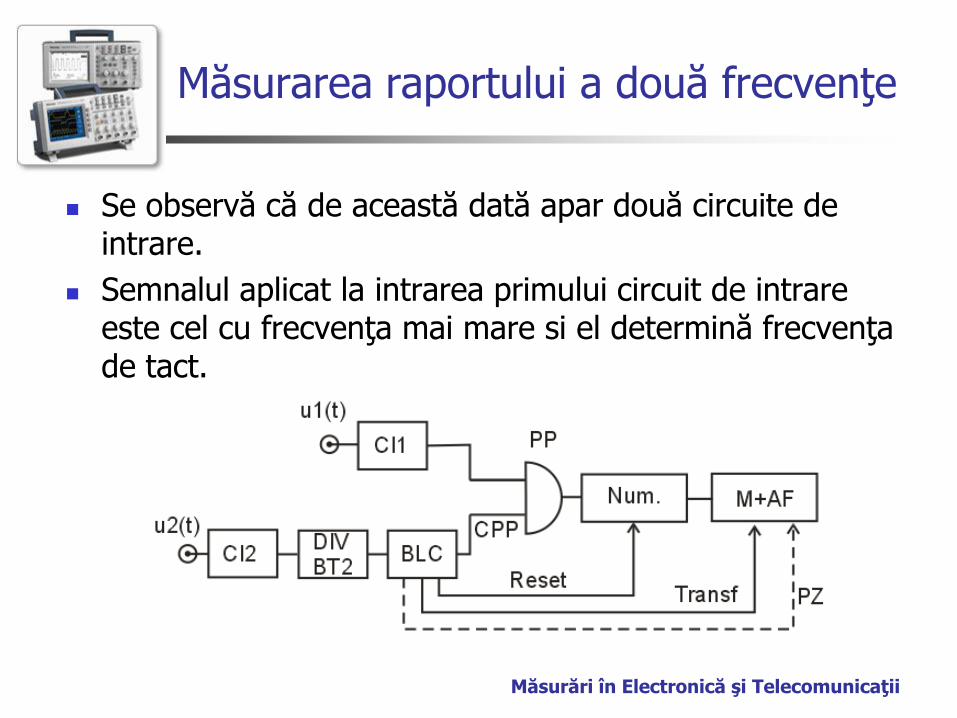
Se observă că de această dată apar două circuite de intrare.
Semnalul aplicat la intrarea primului circuit de intrare este cel cu frecvenţa mai mare si el determină frecvenţa de tact.
Măsurări în Electronică şi Telecomunicaţii
Măsurarea raportului a două frecvenţe
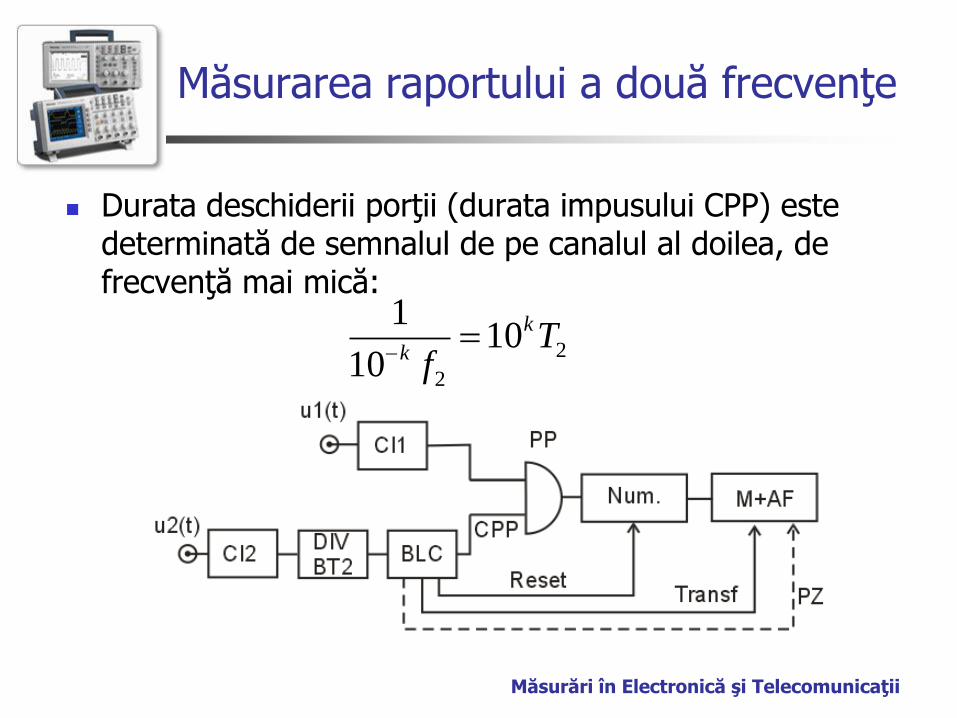
Durata deschiderii porţii (durata impusului CPP) este determinată de semnalul de pe canalul al doilea, de frecvenţă mai mică:
2
2
110
10
k
kT
f

Măsurări în Electronică şi Telecomunicaţii
Măsurarea raportului a două frecvenţe
Numărul de impulsuri numărate în acest interval este:
deci valoarea măsurata a raportului de frecvenţe este:
Rezoluţia este de 10-k.
2 2 1
1 1 2
10 1010
k kk
x x
T T fN N
T T f
1
2
10 k
x
fN
f

Măsurări în Electronică şi Telecomunicaţii
Măsurarea raportului a două frecvenţe
Erori: Baza de timp nu mai intervine, aşa încât eroarea de
primul tip dispare
Eroare de cuantizare:
Eroarea de basculare datorată canalului CI2 , care asigură durata deschiderii porţii principale, care la periodmetre este εr0''', iar având în vedere măsurarea multiplă,
1
'' 1
2
10 k
rk
m
f
f
''' '''
010 k
rk rk

Măsurări în Electronică şi Telecomunicaţii
Măsurarea intervalelor de timp între două impulsuri
Din schema bloc rezultă:
Şi această configuraţie necesită două circuite de intrare, schema funcţionând cu două semnale de intrare, când comutatorul K este pe poziţia B, sau cu unul singur, pe poziţia A.
Măsurări în Electronică şi Telecomunicaţii
Măsurarea intervalelor de timp între două impulsuri
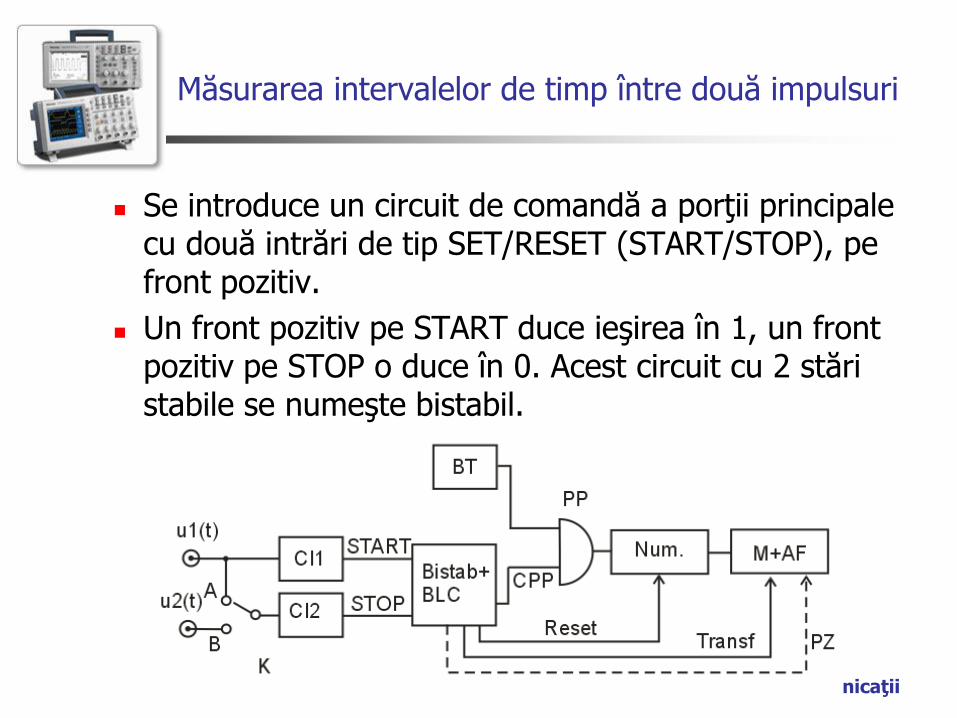
Se introduce un circuit de comandă a porţii principale cu două intrări de tip SET/RESET (START/STOP), pe front pozitiv.
Un front pozitiv pe START duce ieşirea în 1, un front pozitiv pe STOP o duce în 0. Acest circuit cu 2 stări stabile se numeşte bistabil.

Măsurări în Electronică şi Telecomunicaţii
Măsurarea intervalelor de timp între două impulsuri
Ttact=TBT (frecvenţele mari - ca in configuraţia periodmetru).
TCPP dată de semnalele de intrare

Măsurări în Electronică şi Telecomunicaţii
Măsurarea intervalelor de timp între două impulsuri
Formele de undă asociate funcţionării sunt:

Măsurări în Electronică şi Telecomunicaţii
Măsurarea intervalelor de timp între două impulsuri
Tx măsurat depinde de alegerea fronturilor, a nivelelor de prag şi a poziţiei comutatorului K.
Exemple:
a) măsurarea timpului de creştere a unui impuls; se aleg fronturile de acelaşi tip (fronturi crescătoare pentru măsurarea timpului de creştere), iar nivelele sînt 10%, respectiv 90% din amplitudinea semnalului (UP1 < UP2).
Măsurări în Electronică şi Telecomunicaţii
Măsurarea intervalelor de timp între două impulsuri
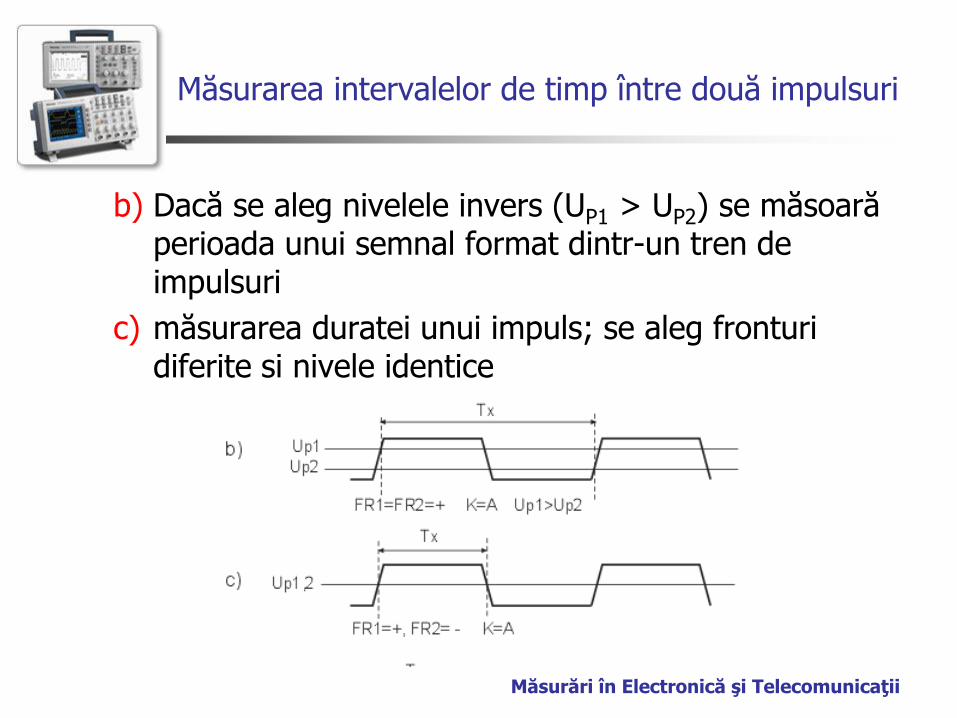
b) Dacă se aleg nivelele invers (UP1 > UP2) se măsoară perioada unui semnal format dintr-un tren de impulsuri
c) măsurarea duratei unui impuls; se aleg fronturi diferite si nivele identice
Măsurări în Electronică şi Telecomunicaţii
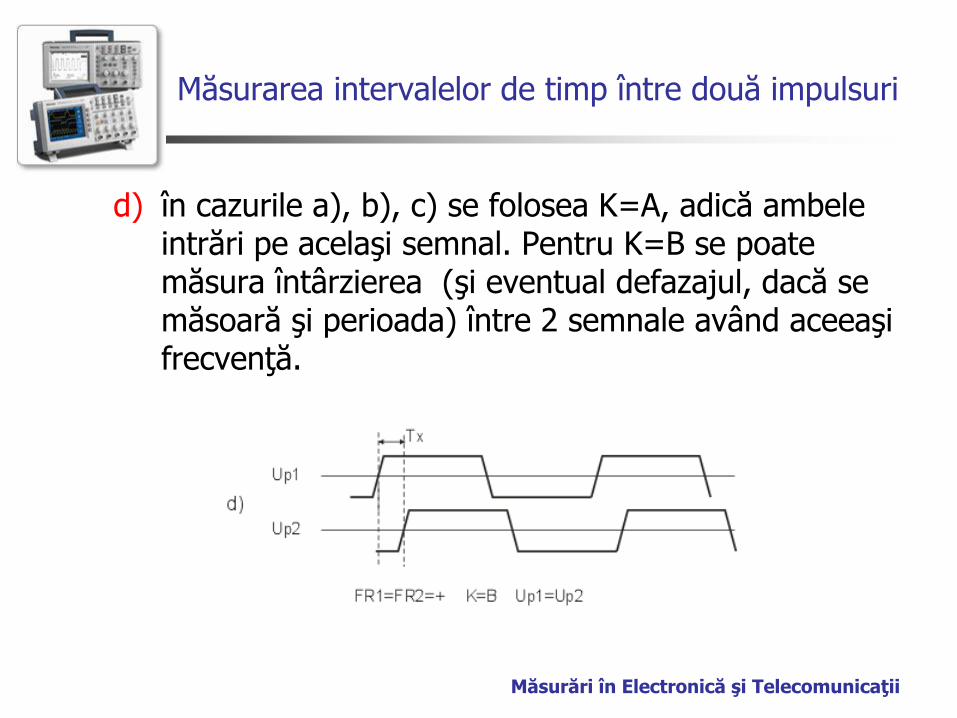
Măsurarea intervalelor de timp între două impulsuri
d) în cazurile a), b), c) se folosea K=A, adică ambele intrări pe acelaşi semnal. Pentru K=B se poate măsura întârzierea (şi eventual defazajul, dacă se măsoară şi perioada) între 2 semnale având aceeaşi frecvenţă.