international conference on localization and … · high definition map-based vehicle ... dealing...
TRANSCRIPT

INTERNATIONALCONFERENCEONLOCALIZATIONANDGNSS
7TH EDITION∣ NOTTINGHAM,UK
09:00 – 09:45 Registration and coffee
Registration desk is outside the conference hallCoffee served in the West Atrium
09:15 - 09:45 Speakers’ Corner Speakers for Day 1 to upload their presentationLocation: conference hall
09:45 - 10:00 Welcome and opening
Prof. Terry Moore, University of Nottingham
Prof. Jari Nurmi, Tampere University of Technology10:00 - 11:00 First keynote
Introduction:Prof Terry Moore
◆ “Space – so what?” : the triumphs, challenges and future opportunities in space exploration and space applicationsProf. Anu Ojha, National Space academy
11:00 - 11:15 Break Refreshments served in the West Atrium
11:15 - 12:30 Session 1: Positioning Applications (a)
Chair:Anna Jensen
◆ Optimization of Anchor Nodes’ Usage for Location Verification SystemsGianluca Caparra, Marco Centenaro Nicola Laurenti, Stefano Tomasin
◆ High definition map-based vehicle localization for highly automated driving: geometric analysisShuran Zheng, Jinling Wang
◆ A new integrated navigation system applied in emergency conditions based on CSACKeTao Li, Si Hai Li, Qiang Wen Fu, Yang Liu, Chao Gu
12:30-13:30 Lunch Served in the West Atrium
13:30-14:30 2nd KeynoteIntroduction:Prof Terry Moore
◆ Update on Galileo System StatusDr, Martin Hollreiser, European Space Agency
14:30-15:20 Session 2: Positioning Applications (b)
Chair: Prof Terry Moore
◆ Effect of Non-Integer Delay on Ranging Accuracy for Ultra-Reliable SystemsMohammad Soliman, Stephan Sand, Martin Schmidhammer, Emanuel Staudinger
◆ Cows, Buses, People: Context Awareness Sensing from Positioning Sensors for Improved Safety, Efficiency and PerformanceOluropo Ogundipe, Elizabeth Homer, Yang Gao
15:20-15:40 Break Refreshments served in the West Atrium
15:40-16:55 Session 3: Positioning Applications (c)
Chair: Wu Chen
◆ Algorithms for Relative Train Localization with GNSS and Track Map: Evaluation and ComparisonBenjamin Siebler, Fabian de Ponte Müller, Oliver Heirich, Stephan Sand
◆ Trading-off location accuracy and service quality: privacy concerns and user profilesZoe Gardner, Didier Leibovici, Anahid Basiri, Giles Foody
◆ Investigation of the RUFRIS Method with GNSS and Total Station for LevelingM. Amin Alizadeh-Khameneh, Anna B. O. Jensen, Milan Horemuž, Johan Vium Andersson
19:30 BBQ Meet in the bar from 19:00
Day 1 Tuesday 27 June 2017
NottinghamGeospatial Institute
Sponsoredby:
INTERNATIONALCONFERENCEONLOCALIZATIONANDGNSS
7TH EDITION∣ NOTTINGHAM,UK
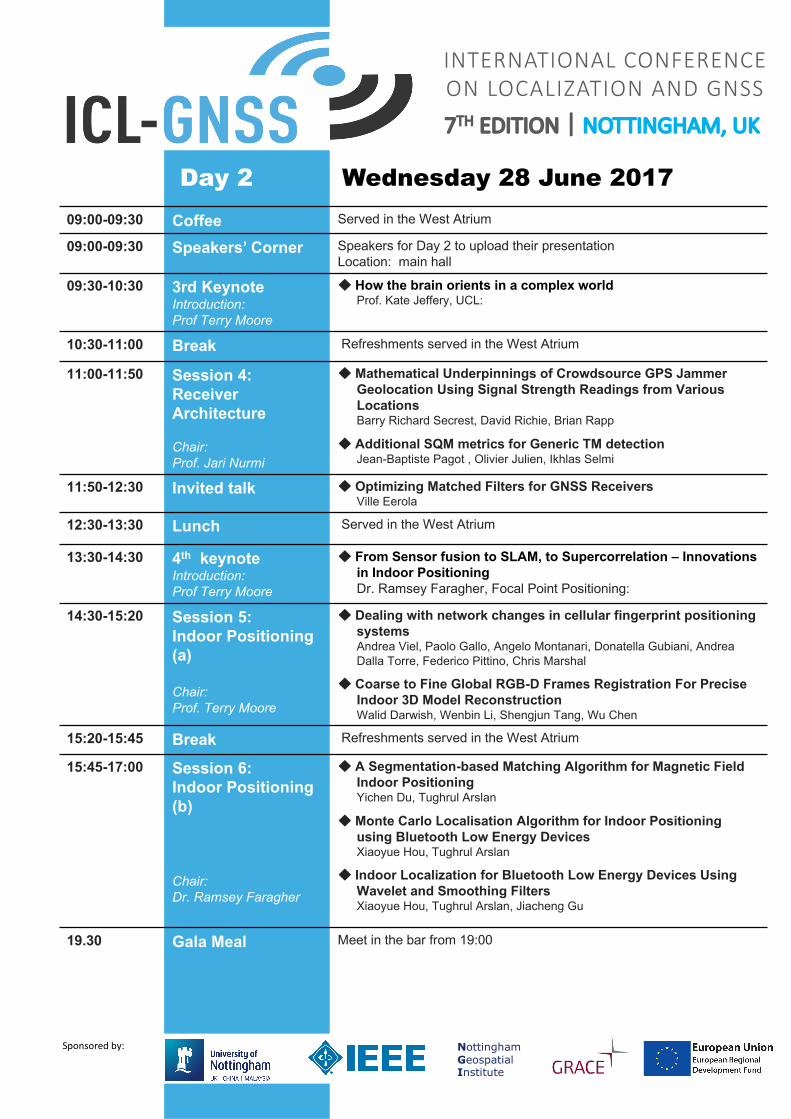
09:00-09:30 Coffee Served in the West Atrium
09:00-09:30 Speakers’ Corner Speakers for Day 2 to upload their presentationLocation: main hall
09:30-10:30 3rd Keynote Introduction:Prof Terry Moore
◆ How the brain orients in a complex worldProf. Kate Jeffery, UCL:
10:30-11:00 Break Refreshments served in the West Atrium
11:00-11:50 Session 4: Receiver Architecture
Chair: Prof. Jari Nurmi
◆ Mathematical Underpinnings of Crowdsource GPS Jammer Geolocation Using Signal Strength Readings from Various LocationsBarry Richard Secrest, David Richie, Brian Rapp
◆ Additional SQM metrics for Generic TM detectionJean-Baptiste Pagot , Olivier Julien, Ikhlas Selmi
11:50-12:30 Invited talk ◆ Optimizing Matched Filters for GNSS ReceiversVille Eerola
12:30-13:30 Lunch Served in the West Atrium
13:30-14:30 4th keynoteIntroduction:Prof Terry Moore
◆ From Sensor fusion to SLAM, to Supercorrelation – Innovations in Indoor PositioningDr. Ramsey Faragher, Focal Point Positioning:
14:30-15:20 Session 5: Indoor Positioning (a)
Chair: Prof. Terry Moore
◆ Dealing with network changes in cellular fingerprint positioning systemsAndrea Viel, Paolo Gallo, Angelo Montanari, Donatella Gubiani, Andrea Dalla Torre, Federico Pittino, Chris Marshal
◆ Coarse to Fine Global RGB-D Frames Registration For Precise Indoor 3D Model ReconstructionWalid Darwish, Wenbin Li, Shengjun Tang, Wu Chen
15:20-15:45 Break Refreshments served in the West Atrium
15:45-17:00 Session 6: Indoor Positioning (b)
Chair: Dr. Ramsey Faragher
◆ A Segmentation-based Matching Algorithm for Magnetic Field Indoor PositioningYichen Du, Tughrul Arslan
◆ Monte Carlo Localisation Algorithm for Indoor Positioning using Bluetooth Low Energy DevicesXiaoyue Hou, Tughrul Arslan
◆ Indoor Localization for Bluetooth Low Energy Devices Using Wavelet and Smoothing FiltersXiaoyue Hou, Tughrul Arslan, Jiacheng Gu
19.30 Gala Meal Meet in the bar from 19:00
Day 2 Wednesday 28 June 2017
NottinghamGeospatial Institute
Sponsoredby:

INTERNATIONALCONFERENCEONLOCALIZATIONANDGNSS
7TH EDITION∣ NOTTINGHAM,UK
09:00-09:30 Coffee Served in the West Atrium
09:00-09:30 Speakers’ Corner Speakers for Day 3 to upload their presentationLocation: main hall
9:30-10:30 5th Keynote Introduction:Prof Terry Moore
◆Where am I? Reflections on location and placeJeremy Morley, Ordnance Survey
10:30-11:20 Session 7: Ground, Space, and Augmentation Systems Chair: Prof. Terry Moore
◆ Parametrization and Prediction of EGNOS GIVD valuesMaija Kaisa Karoliina Mäkelä, Simo Ali-Löytty, Philipp Müller, Robert Piché
◆ Latent force models in autonomous GNSS satellite orbit predictionSakari Kalevi Rautalin, Simo Ali-Löytty, Robert Piché
11:20-11:40 Break Refreshments served in the West Atrium
11:40-13:20 Session 8: Multi-Sensor
Chair: Prof. Jari Nurmi
◆ Analysis of Radar Sensing Coverage of a Passive GNSS-Based SAR SystemYu Zheng, Yang Yang, Wu Chen
◆ Adaptive Real-Time Dual-Mode Filter Design for Seamless Pedestrian NavigationPekka Sakari Peltola, Chris Hill, Terry Moore
◆ Asymptotic Fault-tolerant Fusion Algorithm based on P-value Mapping for Multi-sensors NavigationRong Wang, Zhi Xiong, Jianye Liu, Rongbing Li, Yuxuan Cao
◆ Peer-to-Peer Cooperative GNSS-based Localization for Stationary Reference Nodes in Wireless Sensor NetworksIsmo Hakala, Jari Luomala
13:20-14:15 Lunch Served in the West Atrium
14:15- 15:30 Session 9:
Chair: Prof. Terry Moore
◆ Interoperability of the GNSS's for positioning and timingCaporali and L. Nicolini
◆ The Development of Occupancy Monitoring for Removing Uncertainty within Building Energy Management SystemsSophie Naylor, Mark Gillott, Graham Herries
◆ GNSS observations in Android Lukasz Bonenberg
15:30- 15:45 Closing remarks and the best paper award
Prof. Terry Moore, University of Nottingham
Prof. Jari Nurmi, Tampere University of Technology
15:45 Coffee and farewell Served in the West Atrium
Day 3 Thursday 29 June 2017
NottinghamGeospatial Institute
Sponsoredby:

Car Park
Lake
Decking
Bar
West Atrium
Central Atrium
Main Conference
Hall
Restaurant
Hotel Reception
Offices
Meetingrooms
Meetingrooms
F
F
F
F
F
F
F
F
F
F
F
AreasinGreenareopentoICL-GNSSdelegates
Fireexits
Servedrefreshmentsatbreaks
Hotdrinksstand
Toilets
Areasingreyarerestricted
F