integration of a strapdown gravimeter system in an ... -...
TRANSCRIPT

Integration of a strapdown gravimeter system in anAutonomous Underwater Vehicle
Clément ROUSSEL
PhD - Student (L2G - Le Mans - FRANCE)
April 17, 2015
Clément ROUSSEL ISPRS / CIPA Workshop April 17, 2015 1 / 24

Plan
1 Introduction
DefinitionInterests & ApplicationsPrinciple
2 Design & Equation
Instrumentation & CarrierEquation of moving-base gravimetry
3 Performance assessment & Filtering
Numerical simulationsFiltering strategy
4 Further work
Clément ROUSSEL ISPRS / CIPA Workshop April 17, 2015 2 / 24

Introduction
What is gravimetry ?
scalar gravimetry: ‖g‖
vectorial gravimetry:
gxgygz
Clément ROUSSEL ISPRS / CIPA Workshop April 17, 2015 3 / 24

Introduction
Why do we measure gravity in the subsea domain ?
in geodesy: to improve the determination of the geoid
in geophysics: to determine the distribution of masses in the ocean crust
in navigation: to improve underwater navigation
Clément ROUSSEL ISPRS / CIPA Workshop April 17, 2015 4 / 24

Introduction
How do we measure gravity in the subsea domain ?
Gravity is usually measured in units of acceleration [1m.s−2 = 10−5 mGal ]
An instrument used to measure gravity is known as a gravimeter
One can regard gravimeters as special-purpose accelerometers
Unmanned Underwater Vehicle (UUV)
Clément ROUSSEL ISPRS / CIPA Workshop April 17, 2015 5 / 24

Design & Equation
Instrumentation
LiMo-g : Light Moving gravimetry system
Geodesy and Geomatic Lab (L2G) & Geodesy Lab (LAREG)
Doctoral Thesis of Bertrand de Saint-Jean (2008)
GRAVIMOB : MOBile GRAVImetry system
Oceanic Domains Lab (LDO)
Marcia Maïa (Head scientist) & Jean-François d’Eu (Instrumentationengineer)
Clément ROUSSEL ISPRS / CIPA Workshop April 17, 2015 6 / 24
Design & Equation
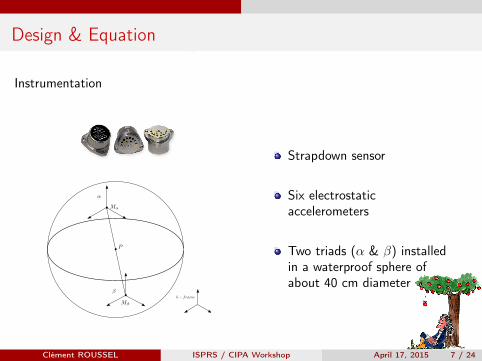
Instrumentation
Strapdown sensor
Six electrostaticaccelerometers
Two triads (α & β) installedin a waterproof sphere ofabout 40 cm diameter
Clément ROUSSEL ISPRS / CIPA Workshop April 17, 2015 7 / 24

Design & Equation
Carrier
Autonomous Underwater Vehicule:AsterX
IFREMER: French ResearchInstitute for Exploitation of the Sea
Navigation: INS + DVL + USBL
able to dive down to 3, 000m &travel up to 100 km
total mass of 800 kg &scientific payload of 200 kg
Clément ROUSSEL ISPRS / CIPA Workshop April 17, 2015 8 / 24

Design & Equation
Equation of moving-base gravimetry
Application of Newton’s Second Law:
X iα = g i
α + aiα (1)
X iα position vector of the proof mass
Mα
X iα second-order derivative of X i
α
g iα gravitationnal acceleration
aiα restoring force per unit of mass
projected onto the i-frame
Clément ROUSSEL ISPRS / CIPA Workshop April 17, 2015 9 / 24

Design & Equation
Frames
i-frame inertial-frame
e-frame earth-frame (in rotation with respect to the i-frame)
n-frame navigation-frame (defined by the geographic coordinates of theAUV: longitude λP , latitude ϕP and ellipsoidal height hP)
b-frame body-frame (defined by the attitude angles of the AUV: heading δ,pitch χ and roll η)
Clément ROUSSEL ISPRS / CIPA Workshop April 17, 2015 10 / 24
Design & Equation
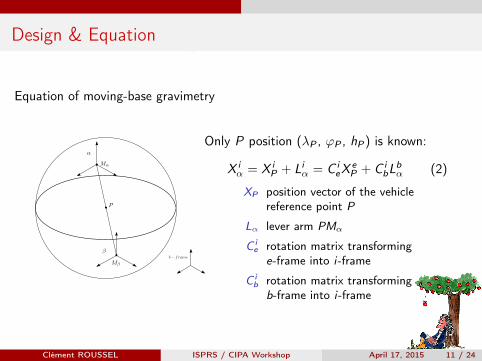
Equation of moving-base gravimetry
Only P position (λP , ϕP , hP) is known:
X iα = X i
P + Liα = C i
eXeP + C i
bLbα (2)
XP position vector of the vehiclereference point P
Lα lever arm PMα
C ie rotation matrix transforming
e-frame into i-frame
C ib rotation matrix transforming
b-frame into i-frame
Clément ROUSSEL ISPRS / CIPA Workshop April 17, 2015 11 / 24

Design & Equation
Equation of moving-base gravimetry (neglecting the rotation of the Earth)
gnα = Cn
e X eP + Cn
b
(Ωb
ebΩbeb + Ωb
eb
)Lbα − Cn
b abα (3)
gnα gravitational vector at point Mα
Cne rotation matrix transforming e-frame into n-frame (λP , ϕP)
X eP second-order derivative of X e
P (λP , ϕP)
Cnb rotation matrix transforming b-frame into n-frame (δP , χP , ηP)
Ωbeb skew symmetric matrix associated with the rotation of the b-frame with
respect to the e-frame (λP , ϕP , δP , χP , ηP)
Lbα lever arm PMb
α
abα restoring force per unit of mass
Clément ROUSSEL ISPRS / CIPA Workshop April 17, 2015 12 / 24

Design & Equation
Equation of moving-base gravimetry (neglecting the rotation of the Earth)
gnα = Cn
e X eP + Cn
b
(Ωb
ebΩbeb + Ωb
eb
)Lbα − Cn
b abα (4)
gnβ = Cn
e X eP + Cn
b
(Ωb
ebΩbeb + Ωb
eb
)Lbβ − Cn
b abβ (5)
And gnP ? Under the assumption that Lα = −Lβ :
gnP ≈
gnα + gn
β
2(6)
gnP ≈ Cn
e X eP − Cn
b
(abα + ab
β
2
)(7)
Clément ROUSSEL ISPRS / CIPA Workshop April 17, 2015 13 / 24

Performance assessment & Filtering
Numerical simulations (Monte-Carlo)
gnP ≈ Cn
e X eP − Cn
b
(abα + ab
β
2
)(8)
f :
λP , ϕP , hPδ, χ, ηaα, aβ
→ gP (9)
f multivariate function mapping R12 into R3
Clément ROUSSEL ISPRS / CIPA Workshop April 17, 2015 14 / 24

Performance assessment & Filtering
Numerical simulations (Monte-Carlo)
f :
λP + ελ, ϕP + εϕ, hP + εhδ + εδ, χ+ εχ, η + εη
aα + εα, aβ + εβ
→ gP + εg (10)
εθ additive noise term, θ = λ, ϕ, h, δ, χ, η
εg error on gravity vector
N random draws
E [εg ] =1N
N∑i=1
εg ,i (11)
σ[εg ] =√
E [(εg − E [εg ])2] (12)
Clément ROUSSEL ISPRS / CIPA Workshop April 17, 2015 15 / 24

Performance assessment & Filtering
Numerical simulations (Monte-Carlo)
Reference gravity field derives from a geological model of oceanic crust
bathymetric survey (2.70 g.cm−3)distribution of mineral blocks (3.85 g.cm−3)
Reference trajectory of the AUV
derives from a test mission carried out by the IFREMERdeterministic modelspolynomial & periodic functions12 profiles, each about 3, 600m long, hP = −2200m
Clément ROUSSEL ISPRS / CIPA Workshop April 17, 2015 16 / 24

Performance assessment & Filtering
Numerical simulations (Monte-Carlo)
3
Clément ROUSSEL ISPRS / CIPA Workshop April 17, 2015 17 / 24
Performance assessment & Filtering
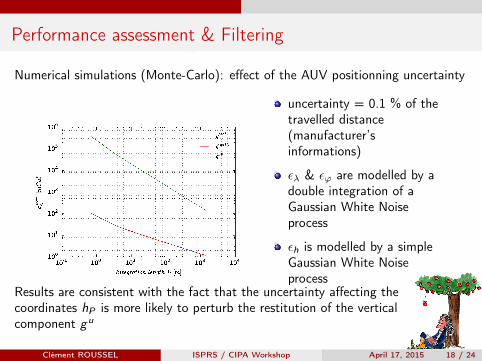
Numerical simulations (Monte-Carlo): effect of the AUV positionning uncertainty
uncertainty = 0.1 % of thetravelled distance(manufacturer’sinformations)
ελ & εϕ are modelled by adouble integration of aGaussian White Noiseprocess
εh is modelled by a simpleGaussian White Noiseprocess
Results are consistent with the fact that the uncertainty affecting thecoordinates hP is more likely to perturb the restitution of the verticalcomponent gu
Clément ROUSSEL ISPRS / CIPA Workshop April 17, 2015 18 / 24

Performance assessment & Filtering
Numerical simulations (Monte-Carlo): effect of the AUV attitude uncertainty
uncertainty = 0.02deg (δ)& 0.01deg (χ & η)(manufacturer’sinformations)
εδ, εχ & εη are modelled bya Gaussian White Noiseprocess
Components g e & gn are more affected by the attitude uncertaintythan the vertical component gu
Clément ROUSSEL ISPRS / CIPA Workshop April 17, 2015 19 / 24
Performance assessment & Filtering
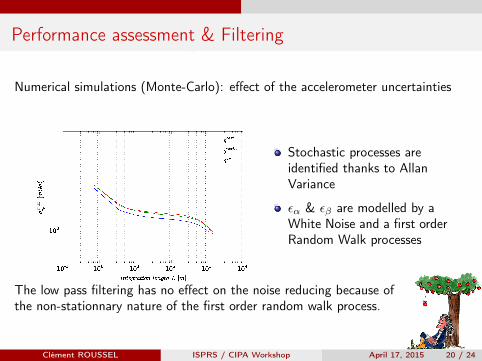
Numerical simulations (Monte-Carlo): effect of the accelerometer uncertainties
Stochastic processes areidentified thanks to AllanVariance
εα & εβ are modelled by aWhite Noise and a first orderRandom Walk processes
The low pass filtering has no effect on the noise reducing because ofthe non-stationnary nature of the first order random walk process.
Clément ROUSSEL ISPRS / CIPA Workshop April 17, 2015 20 / 24

Performance assessment & Filtering
Filtering strategy
Kalman Filter
only for linear system
Extented Kalman Filter
needs Jacobian matrix to be estimated (implementation errors &time-consuming)may lead to an improper estimation of the covariance matrix if thelinearity hypothesis is not respected (divergence of the filter)
Unscented Kalman Filter
does not require the calculation of Jacobian matrixrelies on a deterministic sampling method
Clément ROUSSEL ISPRS / CIPA Workshop April 17, 2015 21 / 24
Performance assessment & Filtering
Filtering strategy
Clément ROUSSEL ISPRS / CIPA Workshop April 17, 2015 22 / 24

Further Work
Calibration
scale factor & bias of each accelerometertransformation matrix Cb
s
Improve Unscented Kalman Filtering
complex noise modelsspatial variability of the gravity field
Test mission
scheduled on March 2016off the Mediterrean coasts in the south of France
Clément ROUSSEL ISPRS / CIPA Workshop April 17, 2015 23 / 24

Thank you for your attention
We are indebted to the French Ministry ofDefence and the Pays de la Loire Region fortheir support of this work.
Jérôme Verdun - supervisorMarcia Maïa - co-supervisorJosé CaliJean François d’Eu
Clément ROUSSEL ISPRS / CIPA Workshop April 17, 2015 24 / 24