informatyka stosowana przez zagdnienia odwrotne (via ... · informatyka stosowana przez zagdnienia...
TRANSCRIPT

S.B. Leble
Informatyka stosowana przezzagdnienia odwrotne (via InverseProblems)Skrypt dla studentów Wydziału FTiMS PG
20 maja 2014
Politechnika GdańskaGdańsk


Spis treści


1
Wstęp
Skrypt jest poświęcony zagadienjom ktore dotyczą zdobywaniu informcji o śro-dowisku, pomiarom laboratoryjnym, obróbkie signałow, uwzględnieniu apa-ratury, ... Np., monitoring, rozpoznawzanie obrazów, tomografja kompute-rowa, USG, pomiary radarowe (sonarowe, lidarowe). Sformulowanie każdegoz tych zagadnień sprowadzi się do tzw. równań całkowych Fredholma pierw-szego rzędu, które, prawie zawsze, tworzą tzw. problemy zle-uwarunkowany(”ill-posed- angielski, śchlecht aufgestelltes Problem- niemecki, ńon bel posti-włoski, nekorrektnye - rosyjski). Często taka klasa problemów nosi nazwęzagadnień odwrotnych (”inverse problems- ang.). Podstawowym elementemrozwiązywania takich zagadnień występuje pewna modyfikacja zagadnienia,mianowicze - sformulownie blizkiego, ale juz dobrze uwarunkowanego (kla-sycznego) zagadnienia. Procedura taka nosi nazwe regularyzacji i pozwala, zjednej strony kontrolować ewentulane nieśczisłosci w sformulowaniu, a z dru-giej - włączyć błedy pomiarowy w sam kontekst tego sformulowania.
Cytaty:”Yu P. Petrov i VS Sizikov i Sizikov - dobrze postawione, źle postawione...Ta książka dotyczy jednego z kluczowych problemów w matematyce stoso-
wanej, czyli dochodzenia do stabilności i przewidujące rozwiązanie równań...http:/www.scribblygumbooks.com.au 789067644327.html”
”In this lecture, one defines nonuniqueness of solutions in inverse problemsin a way that is guided by physical needs. The various forms of nonuniquenessare related to the model, the finite number of data, and measurement errors.One tries to describe them in a way which is relevant to the well-known questof physicists, for almost well-posed models that are consistent both with dataand with all previously obtained information. Approximate methods to getat nonuniqueness cases are then discussed through examples, together withcurrent ways used for suppressing exact nonuniqueness. Thus it is shown byan example that such a way may be meaningless for the physicists’ quest.”[?]
”Physical theories allow us to make predictions: given a complete descrip-tion of a physical system, we can predict the outcome of some measurements.This problem of predicting the result of measurements is called the modeli-

2 1 Wstęp
zation problem, the simulation problem, or the forward problem. The inverseproblem consists of using the actual result of some measurements to inferthe values of the parameters that characterize the system. While the forwardproblem has (in deterministic physics) a unique solution, the inverse problemdoes not. As an example, consider measurements of the gravity field arounda planet: given the distribution of mass inside the planet, we can uniquelypredict the values of the gravity field around the planet (forward problem),but there are different distributions of mass that give exactly the same gra-vity field in the space outside the planet. Therefore, the inverse problem —of inferring the mass distribution from observations of the gravity field— hasmultiple solutions (in fact, an infinite number). Because of this, in the inverseproblem, one needs to make explicit any available a priori information on themodel parameters. One also needs to be careful in the representation of thedata uncertainties.”[?]
Podzękowania dla Damiana Rohraffa, Katarzyny Szymanskiej, DorotyKomornickiej, Dariusza Lubomskiego, Arkadiusza Stasiewicza, Kamila Wicz-kowskiego, Jolanty Borkowskiej, Tomasza Łapińskiego, Iwony Adamskiej, Jo-anny Twardosz, Paweł Zakrzackiego.

2
Zagadnienia i metody informatyki stosowanej
2.1 Klasyfikacja zagadnień według Hadamarda
Hadamard sformulował trzy tezy, ktorę definują dobrze uwarunkowane zagad-nienie:
1. rozwiązanie istnieje;2. rozwiązanie jest jednoznaczne;3. rozwiązanie jest stabilne.
Zagadnienie, które spełnia warunki: 1, 2, 3 nazywamy dobrze uwarunkowanym(tzw. well–posed).Zagadnienie, które nie spełnia któregokolwiek z warunków nazywamyźle uwarunkowanym (tzw. ill–posed).
Przykład Hadamarda. Rozważmy zagadnienie Cauchy’ego dla równa-nia Laplacea funkcji dwóch zmiennych u(x,y).
4u(x, y) = 0,u(x, 0) = 0,
∂∂yu(x, y)|y=0 = a sinnx, x ∈ [0, π], y > 0.
(2.1)
Zagadnienie (2.1) ma rozwiązanie
u(x, y) =a
nsinh(ny) sin(nx). (2.2)
Dla dowonych wartości parametrów ∀ε > 0, c > 0, znajdą sie takie a, n, żeby
|a sinnx| < ε| an sinh(ny) sin(nx)| > c.
(2.3)
analogicznie się zachowuje zagadnenie dla równania przewodnictwa cieplnegoz ódwrotnym czasem”.
Zagadnenie (2.1) łatwo się spowadzi do równania całkowego.

4 2 Zagadnienia i metody informatyki stosowanej
y
π
∫ ∞0
ϕ(ξ)y2 + (x− ξ)2 dξ = f(x). (2.4)
Zagadnienie brzegowe dla równania dyfuzji (przewodnictwa cieplnego)
ut = uxx, (2.5)
może posłużyć dla sformulowanija jeszcze jednego zagadnienia z oczywistymsensem fizycznym. Załóżmy że my mamy możliwość meżyć koncentracje i stru-mień masy na jednym z końców rury. Chcemy oszacować rozkład gęstości masyw rurze. Mamy zagadnienie: równanie (2.5) plus warunki brzegowe
u(0, t) = f1(t), ux(0, t) = f2(t). (2.6)
Ma oczywiste zastosownia w ekologii - np. transport zanieczyszczeń. Niestabil-ność zagadnienia (ill-posed, źle uwarunkowane) wynika z pzykładu. Rozważmywarunki brzegowy:
f1(t) =√
2n sin(nt),
f2(t) = cos(nt) + sin(nt);(2.7)
wtedy rozwiązaniem jest
u(x, t) =√
2 sin[nt+√nx] exp[
√nx]. (2.8)
[?].O szczegułach matematycznych patrz Załąncznik 1.
2.2 Typy zagadnień informatyki stosowanej. Zagadnieniaodwrotne (Inverse problems)
Rozważmy przykład: Zagadnienie Newtona:
1. mx = f(t);2. x(0) = x0;3. x(0)= v0;
Szukamy: x(t) albo x0, v0. Są to zagadnienia wzajemnie odwrotne – gdy znamyjedno z powyższych, możemy wyznaczyć drugie. Poszukiwanie x(t) po danympoczątkowym x0, v0 to zagadnienie proste, natomiast definicja x0, v0 po x(t)- zagadnienie odwrotne. Inny typy zagadnień odwrotnych - poszukiwanie pra-metrów równania: m, f(t)
2.2.1 Typowe Zagadnienia
Wszędzie - powinna być zbadana możliwość uwględnirnia blędów.

2.2 Typy zagadnień informatyki stosowanej. Zagadnienia odwrotne (Inverse problems) 5
I. Modelowanie
Tworzenie f(x, t), x0, (x)0 po danym pomiarów, następnie - rozwiazywanie(analityko-numeryczne) względem funkcji - x(t).x(t)=?
Przykład trojwymiarowy - sterowanie sputnikiem (satelitem). f , r ∈ R3.
II. Prognoza
Przyszlosć (r(t, r0,v0))- po danym początkowym z uwzgłędnieniem błędówr0,v0.
2.2.2 III. Epignoza
Przeszłóść po danym dzisiejszym.
2.2.3 IV. Parametry modelu jako zagadnienie odwrotne
Przykładowe
Definicja masy.
Hipoteza (dane a priori”) o liniowej zależnosci:
m =?; m =F
a.
Jeśli mamy określone położenie ciała punktowego i parametrów śiły, toprzez wzór na przyspieszenie mierząc położenie jako funkcje czasu (tablica)możemy wyznaczyć a i F z błędami.UWAGAWyniki pomiarów dają różne wartości w stosunku do różnych wyników po-miarów.
a1, F1 ⇒ m1 =F1
a1, a2, F2 ⇒ m2 =
F2
a2.
Gdy otrzymujemy zależność liniową tangens kąta nachylenia prostej do osiodpowiada masie:
tgα = m.
Dla dwóch różnych punktów powstają różne proste, formalnie mamy układrównań:
F1 = m ∗ a1, (2.9)
F2 = m ∗ a2, (2.10)
F3 = m ∗ a3. (2.11)
Rozwiązanie tego układu nie istnieje – źle uwarunkowane zagadnienie; Ha-damard – zagadnienie pierwszego typu.

6 2 Zagadnienia i metody informatyki stosowanej
Rysunek 2.1. Zależność przyspieszenia od siły.
Gauss
1. Zagadnienie proste.2. Zagadnienie odwrotne.
Określenie masy jest rozwiązaniem typowego zagadnienia odwrotnego.

2.2 Typy zagadnień informatyki stosowanej. Zagadnienia odwrotne (Inverse problems) 7
Metoda najmniejszych kwadratów
Każdy punkt znajduje się w najmniejszej możliwej odległości od prostej.
D(m) = d1 + d2 + d3 - dodatnie.
Masa odpowiada takiemu kątowi nachylenia, dla którego funkcjonał (d1 +d2 +d3) jest wartosciu minimalnej ∼ tgα. Patrz rozd. 10.Nie jest to wartość konkretna (jest rozmyta, bo dla innych pomiarów jużjest inna), ale leży w pewnym odcinku, dzięki czemu można określić błądpomiarowy jako dyspersje. Masa znajdije się jako rozwiązanie równania.
dD(m)dm
= 0.
wg. warunku koniecznego minima.
Śiła jako funkcja w przestrzeni fazowej F (x, x, t) =?
Np. F = −kx+ β,k = ? , β = ?
Niestabilność
y = ky,
k – stały współczynnik;y = y0e
kt,
y = y0 – warunek początkowy, gdy t = 0.
Rozważmy x0 = 0,
np.y0 = 0.01, y = 0.01ekt
jeśli k > 0 :kt = 10, y = 0.01e10 ∼ 2.
Rozważmy równanie

8 2 Zagadnienia i metody informatyki stosowanej∫ b
a
K(x, S)ϕ(S)dS = f(x) (2.12)
– równanie Fredholma I-rodzaju;
Niech ∫ 1
−1φ(x) dx = 0;
zatem∫ 1
−1x dx = 0 , albo dowolną funkcja antysymetryczna na odcinku - można ją dodać do ϕ;
Równanie (2.12) w jakieś bazie na odczynku [a,b] może być
Aϕ = f , ϕ ∼ ϕ, f ∼ f,
ϕ = A−1f ,
gdzie A jest macierzą (ogólnie - nieskonczoną). Np., - dyskretyzacja.

2.2 Typy zagadnień informatyki stosowanej. Zagadnienia odwrotne (Inverse problems) 9
Przy zwiększaniu częśći, na które dzielimy badany odcinek znajdujemy siębliżej rozwiązania, ale wyniki mogą się stawać coraz gorsze.
2.2.4 Metody zbierania informacji
1. Sonda (pomiar szkodzący)Zagadnienie polega na tym, że przez pomiar dakonany w kilku punktachpola mamy określić rozkład potencjału w całym polu.
pm → p(x.y)
Może też byc ustalenie rozkładu w przetrzeni fazowej np. - prędkosci.Pytanie: jaka jest dokładność albo stabilność takiego ustalenia?Jest to zagadnienie źle uwarunkowane.
2. GrawimetriaZagadnienie polega na tym, że poprzez pomiar (potęcjału) wykonany napowierzchni próbujemy określić wartość gęstości we wnętrzu obiektu. Jestprzykładem pomiaru nieszkodzącego.
3. „Strzał”p(h) – wartość wyjściowa(wartość impulsu po przejściu przez obiekt)p(0) – wartość początkowa(wartość impulsu przed przejściem przez obiekt)Stosunek wartości definuje straty przez całkę. Pomiar prawie nieszkodzący.
4. Radar(pomiar nieszkodzący)5. Tomograf(NMR - pomiar nieszkodzący)
Różni się od 3 tym, że można dokonywać pomiaru-strzału pod różnymikątami i uzyskiwać w ten sposób obraz trójwymiarowy.
6. Skanowanie(pomiar nieszkodzący)7. Pomiar kwantowy(pomiar zasadniczo szkodzący)8. Własności narzędzi pomiarowych
2.2.5 Obróbka sygnałów (przetwarzanie danych)
Każde zbieranie informacji wymaga obróbki, gdyż nie wszystko jest możliwedo zaobserwowania. Nie jest to tylko wią błędów, ale także ograniczenia sto-sowanej metody. Analiza jest utrudniona przez to, że nie jest możliwe, abydane zjawisko zachodziło tylko w jednym kierunku. Obróbka dokonywana jestna podstawie odpowiedniego równania.

10 2 Zagadnienia i metody informatyki stosowanej
2.2.6 Interpretacja danych (stosunek dane - teoria)
Czasami w teorii wiemy, że jakieś punkty powinny leżeć na prostej, ale podokonaniu pomiarów okazuje się, że nie można połączyć ich linią prostą.
2.2.7 Modelowanie
Budowa teorii na podstawie zebranych danych.
2.2.8 Synteza
Odtwarzanie pewnych parametrów, które z powodów fizycznych lub ekono-micznych powinny być stosowane (np. dobieranie soczewek do aparaturyoptycznej). Pozwala to odtworzyć charakterystyki ilościowe. Rezultatem jestfunkcja, która jest rozwiązaniem równania Fredholma.
2.2.9 Rozwiązanie problemu
1.Regularyzacja.2.Reprezentacja numeryczna problemów dobrze uwarunkowanych.
2.3 Metody zbierania danych. Przykłady.
2.3.1 Sonda Langmuir’a w plaźmie
Pomiar prądu przez kule metalową. Policzymy prąd jako funkcje potencjałukuli. Plazma – gaz zjonizowany.Gaz jonów tworzy ośrodek którego charakterystyką jest pewien rozkład:f(r,v), V (r) – potencjał jest określony w każdym punkcie.Przestrzeń fazowa
r,v ∈ Γ.
Rozklad f(r,v) - gęstość prawdopodobieństwa znalezienia elektronu w puncier,v przestrzeńi fazowej.
Np., f(r,v), w kinetikie klasycznej jest rozwiązaniem równania Bolt-zman’a

2.3 Metody zbierania danych. Przykłady. 11
∂f
∂t+ (v,∇)f = F (f),
gdzie F (f) - całka zderzeń,równanie opisuje evolucje f w czasie dla gazów.Wg. definicji, Gęstość plazmy (elektronów) opisana jest wzorem: ne(r) =∫
f(r,v)d v. Podobnie, gęstość strumienia elektronów (prądu) -
j(r) = evne(r). (2.13)
Rozważmy przykład plazmy rozrzedzonej.Jeżeli gęstość elektronów jest mała (ne 1) lub długość toru swobodnegoelektronu λ a lub (w obecności pola magnetycznego) promień Langmuir’aznacznie większy niż a ⇒ ρe a):
f(r,v) = n0(r)f0(E) , E =mv2
0
2=mv2
2+ eV (r).
Wprowadźmy współrzędne sferyczne z „0” w środku sondy.
f(v, r)|r=a = n0f0(mv2
2+ eV (a)) , θ <
π
2,
f(v, r)|r=a = 0 , θ >π
2,
gdzie θ jest kątem między wektorem prędkości a wektorem normalnym dopowierzchni kuli. Wtedy, strumień elektronów przez powierznie kuli j jest∫S
jndS. Podstawiamy (2.13)
j = 2πe∫ π
2
0sinθdθ
∫ ∞0v2(vcosθ)f(a,v)dv = πen0
∫ ∞0v2f0(
mv2
2+ eV )vdv,
j =2πenom2
∫ ∞eV
(E − eV )f0(E)dE. (2.14)
Równanie (2.14) jest równaniem całkowym Volterry I rzędu.Uzyskujemy f0(E) przez pomiary prądu.Funkcja w pewnym obszarze jest funkcją, której możemy ufać.

12 2 Zagadnienia i metody informatyki stosowanej
Rysunek 2.2. Charakterystyka Volt - Ampere’a.
V ∈ [A,B],
x
e∈ [A,B], (2.15)
eV = x , E = s,
fo(E) = ϕ(s) , j(V ) = f(x),
f(x) =∫ ∞x
K(x, s)ϕ(s)ds, (2.16)
gdzie:
K(x, s) =2πen0
m2 (s− x).
Równanie (2.16) jest równaniem Volterry I rzędu.
f(x) =∫ ∞x
K(x, s)ϕ(s)ds+ ϕ(x) – równanie Volterry II rzędu.
Sformułowanie zagadnienia odwrotnego
Poszukujemy ϕ(s) = ? jako rozwiązanie równania (2.16) przy warunku (2.15)i podanej funkcji f(x).Równania Volterra o ciągłym jądrze I rzędu są niestabilne (patrz załącznik).
2.3.2 Znajdowanie złóż przez pomiary potecjału pola grawitacji napowierzni Ziemi
Grawimetria - pomiary pola grawitacyjnego na granicy pewnego obszaru ocelach wyznaczenia gęstosci masy wewnątrz tego obszaru (wykorzystywananp. w geofizyce); Funkcję rozkładu gęstosci masy oznaczymy teraz symbolem

2.3 Metody zbierania danych. Przykłady. 13
Rysunek 2.3. Znajdowanie złóż przez pomiary potecjała pola grawitacji na granicy.
ρ(r). Wzóre na potencjał masy w obszarze T (ograniczonym powirsznią S) wpunkcie r
V (r) =∫T
ρ(r′)|r− r′|
dr′ – równanie Fretholma I rzędu względem ρ. (2.17)
II wzór Greena: ∫T
divAdr =∫S
Adσ , A = v5 u; (2.18)
∫T
(v∆u− u∆v)dr′ =∫S
(v∂u
∂n− u∂v
∂n)dσ; (2.19)
v = W,
u = 1|r′−r| = 1
R (jest funkcją harmoniczną: ∆ 1R = 0);
−∫T
1R4Wdr =
∫S
[W∂
∂n
1R− 1R
∂W
∂n]dr; (2.20)
4W = σ; (2.21)
W |S =∂W
∂n|S = 0; (2.22)
przy zamianie ρ → ρ + σ potencjał nie zmienia się, więc ρ określa się nijed-noznacznie; mając określone potencjały na granice nie można jednoznzaczniewyznaczyć ρ. Złamany drugi warunek Hadamarda.
Twierdzenie Novikowa – Sretenskiego (1938r).
Rozpatrzmy ρ = ρ0 w punktach obszaru T , wtedy (2.17) jest nowym typemzagadnienia, gdzie się uzyskuje sam obszar T albo jego granica (Powstajepytanie o jednoznacznośći określenia formy ciała o podanym rozkładzie). Od-powiedz daje następujące twierdzenie [?].

14 2 Zagadnienia i metody informatyki stosowanej
Niech K – klasa ciał wypukłych, które mają punkt wspólny i ρ = ρ0 (stałagęstość).Dwum ciałom o różnej formie klasy K odpowiadają różne potencjały ze-
wnętrzne:
T1 6= T2 ⇒ V1(r) 6= V2(r),
gdzie:
r ∈ E\(T1 ∩ T2),T =?
Twierdzenie pozwala na zasotosowanie równania (2.17)T wyznaczamy na pod-stawie pomiarów na powierzchni w kilku punktach pomiarowych.

3
Zagadnienia odwrotne dla równania dyfuzji
3.1 Dyfuzja i Przewodnictwo cieplne
Przy pomocy równań procesów dyfuzji, przewodnictwa cieplnego można mo-delować pewne zmiany koncenracji cząsteczek albo temperatury ilościowo.Występują w nich współczynniki (ogólnie - mogą być zależne od czasu, współ-rzędnych, zawierać funkcji żrodeł), których wyznaczenie tez, jako w przypadkurównań Newtona, jest problemem do rozwiązania – prowadzi to do wprowa-dzania uogólnienia, regularyzacji (sprowadzenia do problemy dobrze uwarun-kowanej – ’well-posed problems’). Rozważmy równanie dyfuzji dla koncentracjiU
Ut +DU xx = f(x, t). (3.1)
(3.1) – równanie dyfuzji masy (Ut - prędkość zmian koncentacji, masy na jed-nostkę długości w jednostce czasu).DU xx – gradient strumienia masy; Strumień – liczba jednostek (czasteczek))przechodzących przez podany punkt (przekrój) w jednostce czasu. f(x, t)funkcja żródła masy, Np. na wskutek reakcji chemicznej.
Modelowanie procesów – jest istotne z powodów m.in. technicznych, ekono-micznych (np. prognozy, diagnozy). Badaniu podlegają czynnkiki znajdującesię w miejscach niedostępnych.
3.2 Zagadnienie Cauchy’ego
Rozważmy (3.1) przy f = 0, brak żródeł. Warunek początkowy:
U(x, 0) = ϕ(x). (3.2)
Funkcja Green’a:
G(x, ξ, t) ∼ 1√te−(x−ξ)24Dt .

16 3 Zagadnienia odwrotne dla równania dyfuzji
Rozwiązanie (3.1) pod warunkiem (3.2):
U(x, t) =∫ ∞−∞
G(x, ξ, t)ϕ(ξ)dt (3.3)
1. ϕ, f → U(x, t) - zagadnienie proste dla (3.1);odtworzenie koncentracji pewnych jednostek w punkcie x w czasie t.
2. Mierząc pewne wartości U można odtworzyć funkcje ϕ - zagadnienie od-tworzenia funkcji źródła
U(x, t)→ ϕ.
Rozpatrzymy x = 0 jako punkt obserwacji, wtedy :
U(0, t) = ψ(t), (3.4)
f(x, t) = δ(x− x0)f(t), ϕ = 0, (3.5)
U(0, t) = ψ(t) =∫ t
0
∫ ∞−∞
G(0, ξ, t−τ)δ(ξ−x0)f(τ)dτ =∫ t
0G(0, x0, t−τ)f(τ)dτ,
ψ(t) =∫ t
0G(0, x0, t− τ)f(τ)dτ =
∫ t
0K(t, τ, x0)f(τ)dτ, (3.6)
(3.6) – równanie Volterra I rzędu,x0 - parametr zagadnienia,t ∈ [0, t0].
Problemy zwiazane z pomiarami:– ilość punktów potrzebna do odtworzenia funkcji źródła– sposób odtworzenia danych na podstawie pomiarów.

4
Odtwarzanie uszkodzonych zdjęć – zagadnienieodwrotne w optyce geometrycznej
4.1 Fotografia
W optyce geometrycznej można zaniedbać zjawiska dyfrakcji i interferencji.Zapominamy, że światło jest falą o długosci λ pod warunkiem że λ d, gdzied – rozmiar obiektu (szczegółu).
Rysunek 4.1. Odtwarzanie obrazu.
1f1
+1f2
=1f, f1 f,

18 4 Odtwarzanie uszkodzonych zdjęć – zagadnienie odwrotne w optyce geometrycznej
w,w′ – intensywności,w(ξ, η) – reprezentuje obrazek (zdjęcie) na odległosci f1,w′(ξ′, η′) – rzeczywistość na odległosci f2; f -odległość ogniskowa.
w(ξ, η) = w′(ξ′, η′), (4.1)
ξ′
f1=−ξf2,
η′
f1=−ηf2. (4.2)
Zagadnienie proste:w(ξ, η) = w′(ξ′, η′),
gdzie:
ξ =−ξ′
q, η =
−η′
q,
q =f1
f2, f2 = (
1f− 1f1
)−1, f1 f.
4.2 Zdjęcia uszkodzone, „rozmaz”.
Niech w trakcie wykonywania zdjęcia aparat lub ciało znajdują się w ruchu, zprędkością v, kierunek ruchu pokrywa się z osią ξ, v ‖ ξ, układ współrzędnych(x, y) pokrywa się w chwili początkowej z (ξ, η).
Rysunek 4.2. Przesuniecie w funkcji czasu.
∆ = vτ,
gdzie: ∆ – przesunięcie, τ – czas wykonywania zdjęcia.Do punktu x, y trafi intensywność od całego odcinka:

4.3 Odtważanie zdjęcz. Rozwiązywanie: transformacje Fouriera 19
w(x, y) =1∆
∫ x+∆
x
w′(ξ, y) dξ. (4.3)
Wprowadzamy funkcję:
K(x, ξ) =
1∆ dla ξ ∈ [x, x+∆]0 dla ξ /∈ [x, x+∆]
(4.4)
w′(x, y) = ϕ(x), w(x, y) = f(x).
Odrzymujemy równanie Fredholma I rzędu:
f(x) =∫ ∞−∞
K(x, ξ)ϕ(ξ)dξ. (4.5)
∆ – na tym odcinku energia dochodzi w czasie τ . Intensywność – liczba reakcjichemicznych w pewnym punkcie; gdy ciało się porusza następuje rozmazanie.
4.3 Odtważanie zdjęcz. Rozwiązywanie: transformacjeFouriera
Metoda transformacji Fouriera – funkcję reprezentuje się całką Fouriera lubszeregiem Fouriera; na całej osi - całką Fouriera (widmo ciągłe):
ϕ(x) =1√2π
∫ ∞−∞
eiωx ϕ(ω) dω,
f(x) =1√2π
∫ ∞−∞
eiωxf(ω) dω, f(ω) =1√2π
∫ ∞−∞
e−iωxf(x)dx ,
1√2π
∫ ∞−∞
K(x, ξ)∫ ∞−∞
eiωξϕ(ω)dω dξ = f(x), (4.6)
całkujemy ∫ ∞−∞
1iω∆
[eiω(x+∆) − eiwx ]ϕ(ω)dω =∫ ∞−∞
eiωxf(ω) dω,
∫ ∞−∞
1iω∆
(eiω∆ − 1)eiωxϕ(ω) dω =∫ ∞−∞
eiωxf(ω) dω,
funkcje eiωx są liniowo niezależny, więc
f(ω) =1
iω∆(eiω∆ − 1)ϕ(ω); (4.7)
podstawiamy

20 4 Odtwarzanie uszkodzonych zdjęć – zagadnienie odwrotne w optyce geometrycznej
ϕ(x) =1√2π
∫ ∞−∞
eiωxϕ(ω)dω =1√2π
∫ ∞−∞
eiωxiω∆f(ω)
(eiω∆ − 1)dω. (4.8)
Trudność całkowania numerycznego: eiωx – bardzo szybko oscylują; Ko-mentarz. Kierunek rozmazania można określić po śladam na zdięczu.
Reprodukcja ilustracji z [?]. a) Rozmaz b) Wyniki odtwarzania przes roz-wiązywanie równania (4.5) metodą Fouriera. c) Metoda Tikhonova.
Rysunek 4.3. Obrazki z [?].(a) uszkodzone.
4.4 Uszkodzenie zdjęcia pszez dyfrakcją
Promień krążka dyfrakcyjnego:

4.4 Uszkodzenie zdjęcia pszez dyfrakcją 21
Rysunek 4.4. Obrazki z [?]. (b-d) - rekonstrukcja przy różnych wartośćiach para-metra regularyzacji α = 0(b),2.5 103(c),0.1(d)
ρ = aδf2
δ– odległość między dwiema płaszczyznami
x = − f2−δf1ξ′
y = − f2+δf2η′
Z powodu krążka informacja jest rozmyta i informacja z danego punktu mieszsię z informacją z punktów sąsiednich.Warunek „trafienia” informacji z otoczenia:√
(x− ξ)2 + (y − η)2 ¬ ρ
g(x, y)– intensywność w punkcie (x, y)

22 4 Odtwarzanie uszkodzonych zdjęć – zagadnienie odwrotne w optyce geometrycznej
g(x, y) =∫ ∫
Ωω(ξ,η)πρ2 dξdη
Ω =√
(x− ξ)2 + (y − η)2 ¬ ρ
g(x, y) = 1πρ2
∫ ∫∞−∞K(x− ξ, y − η)ω(ξ, η)dξdη
K(x− ξ, y − η) = 1 gdy√
(x− ξ)2 + (y − η)2 ¬ ρK(x− ξ, y − η) = 0 gdy
√(x− ξ)2 + (y − η)2 > ρ
Uwaga:δ,∆ =?
Są to parametry.

5
Metoda „cięciw”w diagnostyce plazmy–chord method
5.1 Wyprowadzenie równania całkowego. Sformulowaniezagadnienia odwrotnego.
Ogólnie, niech mamy do czynienia z propagacją fali (promieniowania) z punktuA do B. Zbieramy dane o ewentualnych zmianach w trakcie propagacji. Cał-kujemy wzdłuż ćięciwy”(patrz Fig. 5.1 )
Rysunek 5.1. Droga propagacji fali (promieniowania) od A do B
∫ B
A
φ(s, r)dl = f(s), (5.1)

24 5 Metoda „cięciw” w diagnostyce plazmy –chord method
φ(s,r) - informacja o parametrach wewnętrznych układu,f(s) - otrzymujemy informację pomiarową.
Rozważmy przykład : diagnostyka plazmy:dla procesów typowa wysoka częstotliwość, mała długość fali (λ a, λ -mała w porównaniu ze skalą niejednorodności, a więc można zaniedbać efektdyfrakcji) oraz faza Φ się zmienia.
λ – długość fali a – scala nejednorodnosci plazmy.
Plazmę charakteryzuje:
częstotliwość plazmowa ωp (związana z parametrem gęstości elektronów∼ n(r 4πne2
m ) ω2
p ∼ n(r) zmiana fazy Φ
Interesuje nas elementarna zmiana fazy na dl:
dΦp = kpdl =ω
cpdl,
przy czym:c - predkość propagacji fali elektro-magnetycznej w próżni,cp - predkość propagacji fali elektro-magnetycznej w plazmie,k - moduł wektora falowego.
dΦ = dΦ0 − dΦp,
gdzie:dΦ0 = ω
cdl - zmiana fazy w próżni
dΦp - zmiana fazy w plazmiePełna zmiana fazy plazma - próżnia wyraża się wzorem:
Φ(ω) =∫ B
A
ω
c(1−N(ω, r))dl, (5.2)
gdzie:N(r) - współczynnik załamania= c
cp.Φ– różnica faz fali między A (nadajnik) i B
(odbiornik)- Równanie całkowe typu Fredholma.
1−N(r) = 1−√
1− ω2pω2≈ ω2p2ω2 = n(r)
2n0
gdzie ω2p = 4πne2
m
n0 = mω2
4πe2

5.2 Podsumowanie matematyczne 25
ω2 ω2p,Teoria (patrz np. skrypt S. Leble Elektrodynamika stosowana”)w najprostym ujęciu daje
N =
√1−
ω2p
ω2 ≈ 1−ω2p
2ω2 (5.3)
oraz:
n0 =mω2
4πe2 , (5.4)
1−N ≈ n(r)2n0
.
Wstawiając równanie (5.2) → (5.3) otrzymujemy:
Φ =ω
c
∫ B
A
n(r)2n0
dl = f(ω),
ω
2n0c
∫ B
A
n(r)dl = f(ω). (5.5)
Powyższe równanie może być skomplikowane np: dla n(x, y, z).
5.2 Podsumowanie matematyczne
Po podstawieniu (5.4)∫ B
A
4πe2
2mωcn(r)dl =
∫ B
A
K(ω, r)n(r)dl = f(ω). (5.6)
Równanie, które wyprowadziliśmy można nazwać operatorowym:
An = f ; n ∈ Z , f ∈ F, (5.7)
n = A−1f .
Rozwiązanie jest niestabilne. Głównym problemem jest dobór przestrzeni:
Z=? F=?
Zmiana kierunku pomiarów powoduje zmianę wyniku pomiaru (zmiana cię-ciwy).Otrzymaliśmy równanie całkowe Fredholma I rzędu (5.6).
TOMOGRAFIA - przy pomiarach wzdłuż różnych kierunków nie otrzy-mujemy informacji o punkcie; zmiana kierunku „cięciwy”→ zmiana wynikówpomiarów. Istnieje jednak możliwość uzyskania wzorów dających wartość wposzczególnych punktach (zależność od częstotliwości).


6
Problemy rozpoznawania i syntezy welektrodynamice
6.1 Wstęp
Rozważmy równanie z poprzedniego rozdziału:
An = f .
Zagadnenia odwrotne elektrodynamiki w szerokim sensie tego typu problemówmają na celu wykrywanie oraz określenie położenia i formy ciał na podstwiebadania i obróbki wyników pomiarów pól elektromagnetycznych.Podział zagadnień odwrotnych w elektrodynamice:
I. Problem rozpoznawania:Uzyskanie parametrów danego ośrodka (zagadnienie odwrotne).
1. Istnieją rozwiązania (uzasadnione fizycznie);2. można udowodnic żę jest jednoznaczne;3. stabilne (odporne na zaburzenia, błędy, zmiany parametrów
wejściowych).II. Problem syntezy:
Interesują nas tylko rezultaty (wybieramy takie n, aby f było odpowied-nie).
Obie klasy problemów dotyczą źródeł pól, nejednorodności albo geometriiciała rozpraszającego za pośrednictwem badania danego pola radiacji.
Ogólnie: Powstaje równanie operatorowe:
A[z] = u, z ∈ Z, u ∈ U,
gdzie Z, U – przestrzenie funkcyjne.Odwzorowanie: Z→U jest odwzorowaniem zwartym i ciągłym, przy czym
u jest pomiarem a z poszukiwanymi parametrami ośrodka.Zagadnienie odwrotne polega na wyliczeniu z przy danym u:

28 6 Problemy rozpoznawania i syntezy w elektrodynamice
z = A−1u.
Zazwyczaj jest to zagadnienie źle uwarunkowane (niestabilne), dotyczy tozarówno problemów typu I jak i typu II, ale:
w przypadku IWybór przestrzeni Z powinien prowadzić do jednoznacznego sformułowa-nia problemu, rozwiązania powinny istnieć fizycznie. Jednak i tak zagad-nienia mogą być niestabilne, chodzi o rozwiązanie uogólnione (otrzymu-jemy rozwiązanie w pewnej klasie podprzestrzeni Y ⊂ Z, patrz szczeguływ Załonczniku).
w przypadku IINie jest wymagana jednoznaczność ani też istnienie rozwiązania, interesujanas tylko rezultaty doboru z przy podanym u. Dobieramy takie z aby ubyło odpowiednie. Gdzie z jest w tym przypadku funkcjomalnym parame-trem w uźytym przez nas narzedziem(np. optycznym, elektonicznym badzinformatycznym).
6.2 Współczynnik załamania w N warstwach
Rysunek 6.1. Propagacjia i załamanie się światła w ośrodku wielowarstwowym ozmiennej stałej materiałowej.

6.2 Współczynnik załamania w N warstwach 29
W przypadku dielektryków izotropowych
D = εE, B = H, (6.1)
gdzie: µ ≈ 1 - przenikalność magnetyczna zbliżona do próżni.Jest to ośrodek izotropowy, bo D ∼ E.
Może to być ośrodek zbudowany specialnie za pomocą technik napyleniawarstw (np. w plazmie). W innych przypadkach mamy do czynienia np. zmodelem dyskretnym ciągłych zmian ε → przejście od równań całkowych(albo różniczkowych) do dyskretnych (macierzowych).Matematyczne zastrzeżenie: ε(z)→ εi ∼ [zi, zi+1]z1 . . . zN - każdy punkt wprowadza nieciągłość do f .
E = E0 ei(kr−ωt)) + c.c. (6.2)
H = H0 ei(kr−ωt)) + c.c. (6.3)
w każdej warstwie [zi, zi+1].Rozważamy falę płaską, czyli otrzymujemy rozwiązanie w przypadku współ-czynników stałych.W elektrodynamice podstawą są równania Maxwella (liniowe), dlatego cha-rakterystyki pola odwzorują się liniowo dla podanych kształtów ciał dyfrakcji.Z ciągłości normalnej sdładowej D na granicach otrzymujemy:
Dn1 = Dn2 ⇒ ε1E1n = ε2E2n ⇒ εiEin = εi+1Ei+1,n, (6.4)
tak samo ze skladowej stycznej pola E
Et1 = Et2 ⇒ Ei+1,t = Ei,t, (6.5)
oraz, przy uwzdlędnieniu (6.1)
Bt1 = Bt2 ⇒ Bi+1,t = Bi,t. (6.6)
Wzory (6.2) i (6.3) dają nam rozwiązanie na każdym odcinku. Potencjałysię definiuja przez
rotA = B,
E = −∇ϕ− 1c∂A∂t ,
E,B → A,ϕ → Π.

30 6 Problemy rozpoznawania i syntezy w elektrodynamice
6.2.1 Nieizotropowość ośrodków
Wiemy, że dla ośrodków izotropowych1 Dn1 = Dn2 oraz D = εE – postaćrównań materialnych (stałych).Zapiszmy równania materialne ogólne (anizotropowe np. kryształ):
Di =3∑k=1
εikEk.
Przejście do ośrodka izotropowego:
εik = εδik.
Tensor εik można zmierzyć poprzez rozwiązywanie zagadnienia odwrotnego(należy zmierzyć składowe w pewnym układzie współrzędnych, tak by mócprzejść do układu tensora diagonalnego).
6.3 Zagadnienie proste i odwrotne dla fal płaskich wośrodku wieluwarstwowym
Powróczmy do problemu propagacji fali płaskiej wzdłuż osi z w warstwach oróżnych współczynnikach materiałowych εi, µi and σi rodzielionych granicamipłaskimi z = zi we współrzędnych Cartesianskich x, y, z; zaznaczmy
E0x = u(z), B0y =ic
ω
∂u
∂z, (6.7)
równanie Faradaja (III równanie Maxwella w postaci różniczkowej), 1c∂B∂t =
−rotE, wziąte pod uwagę.Funkcja u(z) jest rozwiązaniem równania Helmholtza (skutek równania
falowego dla składowej Ex):
uzz +iωµ
c2(iεω − 4πσ)u = 0, (6.8)
co daję wzór na k:
k2 =iωµ
c2(iεω − 4πσ) . (6.9)
Rożnica w reprezentacju pól dla warstw wewnętrznych i zewnętrznychzwiązana z koniecznosciu uwzgłędnenia fali odbitej w każdej warstwe we-wnętrznej.
ui = Pieikiz +Rie
−ikiz,ui+1 = Pi+1e
iki+1z +Ri+1e−iki+1z,
(6.10)
1 Właściwości ośrodka izotropowego (np. szkła) są jednakowe w każdym kierunkupomiaru.

6.3 Zagadnienie proste i odwrotne dla fal płaskich w ośrodku wieluwarstwowym 31
i = 0, ..., N, ki daję się wzorem (6.9), ale dla pólprzesrzeni z > zN zostawiamytylko fale wychodzącą w postaci (6.2).
u∞ = P∞eik∞z. (6.11)
Warunki brzegowe w punktach wewnętrznych z = zi, i 6= 0,∞ mają cha-rakter ciągłości składowych stycznych pól E,B:
ui(zi) = Pieikizi +Rie
−ikizi = ui+1(zi) = Pi+1eiki+1zi +Ri+1e
−iki+1zi ,∂ui∂z |z=zi= ikiPie
ikizi − ikiRie−ikizi =∂ui+1∂z |z=zi= iki+1Pi+1e
iki+1zi − iki+1Ri+1e−iki+1zi .
(6.12)Równania (6.12) tworzą układ który może być rozwiązany w stosunku do
Pi+1, Ri+1 przy podanych zi, ki (6.9). Pamiętamy że
ki =ω
ci,
gdzie prędkość propagacji światła ci jest funkcją parametrów ośródku: εi, σi, µi,patrz (6.9).
Wprowadzmy wector
αi =(PiRi
), (6.13)
dla każdej warstwy. Przejszcie od jednej warstwy do sąsiedniej może być wy-rażone za pomocą macierzy rozpraszania Si.
αi+1 = Si(ki, ki+1, εi, εi+1, zi, zi+1)αi. (6.14)
Ten łańcuch początkuje z i = 0
α1 = S1α0, (6.15)
i kończy się przy i = n, mianowicze
α∞ = Snαn, (6.16)
z
α∞ =(P∞0
). (6.17)
Relacja pomiędzy α0 i α∞ wyraża się jako iloczyn
α∞ =i=n∏i=0
Siα0. (6.18)
Macierz przejszcza (rozpraszania)
S =i=n∏i=0
Si (6.19)

32 6 Problemy rozpoznawania i syntezy w elektrodynamice
rozwiązuje zagadnienie proste (direct problem ) dla propagacji fali w ośrodkacho N warstwach; w warunkach podanych wyżej.
Zagadnienie odwrotne:
S =N∏i=1
S(i) S(ε1 . . . εN , k1 . . . kN , z1 . . . zN ).
Celem jest uzyskanie zestawu współczynników macierzy S.
ψ∞ = Sψ0
Mamy do dyspozycji jedno równanie, ale pomiary można wykonywać dla róż-nych częstotliwości ω1 . . . ωn.
6.4 Podsumowanie
αi =(PiRi
)(wektor wsp. dla każdego z ośrodków),
α0 → α∞ =N∏i=1
Siα0.

6.5 Zagadnienie odwrotne 33
Rysunek 6.2. Przykład ośrodka dla N = 3.
Wyliczenie macierzy na podstawie położenia warstw, gdzie S jest funkcjąpołożenia S(zi, εi).
α0 =(A0
B0
), αN =
(AN0
), ω0 = ciki,
ω
(j)0
→ A
(j)N B
(j)N .
Mamy relacje (6.19) dla każdej częstotliwośćiω
(j)0
i wartości kj dla tej
częstotliwości.
6.5 Zagadnienie odwrotne
6.5.1 Rozpoznawanie
Pomiary A(j)N , B
(j)0 dają możliwość obliczenia:
ε1, . . . , εN , z1, . . . , zN (grubość warstw)
j = 1, . . . , 2N, . . .
Rozwiązanie nie jest w postaci równań całkowych → mamy układ algebra-iczny i, więc, numeryczne rozwiązanie,.
6.5.2 Zagadnienie syntezy
(narzędzie na zamówienie o pewnych parametrach, gdy bezpośrednie pomiarysą niemożliwe)Podane:
współczynnik transmisjiANA0
, współczynnik odbiciaB0
A0;

34 6 Problemy rozpoznawania i syntezy w elektrodynamice
zagadnienie wymaga określenia ε1, . . . , εN , z1, . . . , zN(każda fala elektromagnetyczna: światło, fale radiowe, fale rentgenowskie)- nie interesuje nas rozwiązanie jednoznaczne, chcemy określić warunki tech-niczne (np. dostępne materiały, grubośći warstw, etc.)- zagadnienia potrzebują dowodu stabilności lub regularyzacji.

7
Propagacja dżwięku. Sonar.
7.1 Teoria propagacji dźwięku. Sonar.
Podobnie działają:
Radar – „Radio Detection And Ranging” (detekcja oraz wyznaczanie odle-głości za pomocą fal radiowych). Wykorzystuje fale radiowe (promieniowanieradiowe). Wyróżniamy dwa rodzaje podobnych narzędzi:
Sonar (Sound Navigation and Ranging) – wykorzystuje dzwięk; Lidar (Light Detection and Ranging) – wykorzystuje światło (LASER+teleskop).
Badania lidarowe: European Aerosol Research Lidar Network to Establish anAerosol Climatology: EARLINET http:/www.earlinet.org*
Dzwięk jest falą akustyczną, czyli zaburzeniem parametrów ośrodka spręży-stego (powietrze, woda, plazma, ciało stałe).
Podstawowe rówania dynamiki płynów - – równanie Newtona - Navier-Stokes’a, – równanie ciągłości, – równanie energii - pierwsza zasada ter-modynamiki,:
ρdvdt
= −∇p+ lepkość (7.1)
dρ
dt+ ρ divv = 0 (7.2)
dε
dt=δQ
dt− pdV
dt, (7.3)
gdzie
ρ - gęstość masowa, p - ciśnienie v - prędkość lokalna płynu T - temperatura ε - gęstość energii wewnętrznej

36 7 Propagacja dżwięku. Sonar.
Rysunek 7.1. LIDAR at Kant State University, Kaliningrad
Rysunek 7.2. Lidar. Dane na monitorze. Badanie aerozoli w powietrzu.

7.1 Teoria propagacji dźwięku. Sonar. 37
δQ - gęstość wydzelenie ciepła δQdt ∼ κ
Układ nie jest zamknienty - dodajemy równania stanu.Przykład kalorycznego równania stanu ε(p, T ) (gaz doskonały):
ε = Cv T ;
odpowiednie termiczne równanie stanu p(ρ, T ) dla molu gazu doskonałego:
p = ρRT ,
p = p0 + p′ , ρ = ρ0 + ρ′ , T = T0 + T ′ ,
gdzie:ρ0, p0, T0 – stałe dla ośrodka niezaburzonego,parametry zaburzenia – ρ′, p′, T ′ → ρ, p, T .
Zaniedbanie strat cieplnych (κ→ 0) oraz lepkości (ν → 0): proces adiaba-tyczy:
p = α ργ , γ = Cpv
gdzie α – pewna stała. Równanie falowe dla procesów adiabatycznych, bezuwzględnienia tłumienia:
1c2∂2p′
∂t−∆p′ = 0; (7.4)
c prędkość rozchodzenia się fali dzwiękowej.
Model jednowymiarowy: fala o czole płaskim
1c2ptt − pxx = 0 – równanie jednowymiarowe, p = φ(x± ct). (7.5)
prędkość dzwięku w gazach reprezentuje wzór c2 = γ p0ρ0
cpowietrza ≈ 333m
s(3oC).
Rozważmy fale o określionej czestotliwości:
p,v ∼ exp[iωt] , ω = ck (związek dyspersyjny).
Podstawiając p′ = peiωt + c.c. do równania (7.4), otrzymujemy:
1c2
(iω)2p−∆p = −k2p−∆p = 0,
stad otrzymujemy równanie Helmholtza:
∆p+ k2p = 0, (7.6)

38 7 Propagacja dżwięku. Sonar.
Rysunek 7.3. Generacja dźwięku.
gdzie:
k =2πλ.
Cisnienie w fali wtórnej
p ∼ A(α, β)eikr
r, jest rozwiązaniem asymptotycznym,
gdzie amplituda fali jest proporcjonalna do rozkładu kątowego: A ∼ D(α, β) .
7.2 Wzory Huygens’a i Kirchhoff’a
Niech φ, ψ będą rozwiązaniami równania Helmoltza (7.6):
∆φ = −k2φ , ∆ψ = −k2ψ.
Istnieje tożsamość Green’a łącząca wartości wewnątrz obszaru z wartościamina powierzchi (twierdzenie Green’a):∫
V
(φ∆ψ − ψ∆φ)dV =∫S
(φ∂ψ
∂n− ψ∂φ
∂n)dS. (7.7)
Stąd dla rozwiązania równania Helmoltz’a, otrzymujemy:∫S
(φ∂ψ
∂n− ψ∂φ
∂n)dS = 0. (7.8)
r – położenie dowolnego punktu, wektor jednostkowy – n = rr .
Całka po całej powierzchni S jest równa sumie całek po powierzchniachS1 i S2. Można sprawdzić że ψ = eikr
r jest rozwiązaniem (7.6) Pierwsza całkawtedy wynosi ∫
S1
[φ∂ e
ikr
r
∂n− eikr
r
∂φ
∂n] dS. (7.9)

7.3 Akustyka. Propagacja dżwięku od membrany. 39
Rysunek 7.4. Obszary całkowania.
Korzystająć ze wzorów:
∂
∂n= − ∂
∂r,
∂
∂r(eikr
r) = (
ik
r− 1r2 )eikr , dS = r0
2dΩ,
otrzymujemy z (7.9):
−∫S1
φ(ik
r0− 1r0
2 ) eikr0 dS−∫S1
eikr
r0
∂φ
∂ndS = − ikr0 − 1
r02 eik0r0r0
2∫S1
φ dΩ−eikr0
r0r0
2∫S1
∂φ
∂ndΩ.
Rozważając granicę przy r0 → 0, otrzymujemy:
φ(0)∫dΩ = 4πφ(0).
Uogólniając dla r, podstawiamy do równania (7.8), pamiętając, że ψ = eikr
r(wzór Kirchhoff’a):
φ(r) = − 14π
∫S2
[φ∂ e
ikr
r
∂n− eikr
r
∂φ
∂n] dS, (7.10)
otoczenie określane jest poprzez poszczególne punkty.Można dobrać pole φ|S1 = 0 (wzór Huygens’a):
φ(r) =1
4π
∫S
eikr
r
∂φ
∂ndS. (7.11)
7.3 Akustyka. Propagacja dżwięku od membrany.
7.3.1 Równanie Sonara.
1. Opis zaburzeń ciśnienia, gęstości i prędkości (p′, ρ′, v′) bazuje się naukładzie równań 7.1. Po linearyzacji otrzymujemy równanie falowe 7.4 ilinki dla:
ρ0vt = −∇p′ ⇒ p′ = peiωt + c.c. , φ′ = φeiωt + c.c.

40 7 Propagacja dżwięku. Sonar.
2. φ, ψ – jako rozwiązania równania Helmholtz’a (7.6), przy pomocy wzoruGreen’a (7.7), otrzymujemy wzory Kirchoff’a (7.10) i Huygens’a (7.11).
Dla dżwięku można wprowadzić potencjał prędkości (φ):
v = −∇φ. (7.12)
Normalna składowa prędkośći:
(n,v) =∂φ
∂n= vn. (7.13)
Natomiast zaburzenia ciśnienia można zapisac:
p′ = ρ0∂φ
∂t,
gdyż można zaniedbać zaburzenie gęstośći w przyspieszeniu (nie uwzględ-niamy nieliniowosci): ρ0
∂v∂t = −∇p.
Otrzymujemy:p = iωρ0φ, (7.14)
wtedy φ jest rozwiązaniem równania Helmholtz’a (7.6)
Rysunek 7.5. Oscylująca membrana jako nadajnik.
Wykorzystując wzór na prędkość normalna dla dżwięku (7.13), zapisujemywzór Huygens’a (7.11):
φ(r) =1
4π
∫S
vneikr
rdS. (7.15)
Wstawiamy (7.15) do wzoru na cisnienie (7.14):
p′((r) =iωρ0
4π
∫S
vneikr
rdS. (7.16)
Oznacza to że otrzymaliśmy wzór na ciśnienie w dowolnym punkcie obserwa-cji, aby je otrzymac potrzebne są tylko normalne składowe prędkości, choćmembrana nie tylko drga w kierunkach prostopadłych (np. mikrofon) - przy-bliżenie.

7.3 Akustyka. Propagacja dżwięku od membrany. 41
7.3.2 Zagadnienia proste i odwrotne w akustyce
1. Zagadnienie proste.W oparciu o wzór (7.16). Uzyskanie p′(r) (diagram kierunkowy) z infor-macji o powierzchni S nadajnika oraz punktów do niej należących i roz-kładów prędkośći vn(r′). Zazwyczaj wprowadzą się współrzędne sferyczne:r ⇒ r, θ, ϕ.
2. Zagadnienie odwrotne.Także w oparciu o wzór (7.16). Poszukiwanie S i vn na podstawie pomia-rów ciśnienia p′(r).
Zagadnienie proste:
drgania płaskiego tłoka przy tworzeniu ultradżwięków (płaskim obszaremmoże być antena akustyczna promieniująca, jako nadajnik).
Rysunek 7.6. Rozchodzenie się fali pochodzącej z anteny akustycznej.
Wektor v jest prawie prostopadły do powierzchni tłoka (oprócz krawędzi- pomijamy to).
a) vn = v0 , r′ ∈ S0,b) vn = 0 , r′ /∈ S0 (leży w dowolnym punkcie płaszczyzny po za tłokiem).
Wykorzystamy zależności:
ε = R− r , r ≈ R , r = R− ε,
oraz równanie (7.16):
p′(r) =iωv0e
ikR
4πR
∫S0
eik(r−R) dS. (7.17)
Wprowadzamy stałą:

42 7 Propagacja dżwięku. Sonar.
pn =iωv0e
ikRS0
4πR. (7.18)
Podsatwiając (7.18) do (7.17), otrzymujemy:
p′(r) = pn1S0
∫S0
e−ikε dS. (7.19)
Rysunek 7.7. Rozchodzenie się fali - zamiana współrzędnych.
Z następujących zależności kożystamy przy zamianie zmiennych:
ε = ρ sin(ψ) cos(φ) , dS = ρdρdφ.
D(ψ) =1πa2
∫ a
0ρ
∫ 2π
0e−ikρ sin(ψ) cos(φ)dφdρ =
2a2
∫ a
0ρI0(ρk sin(ψ))dρ,
gdzie:I0 – funkja Bessla 0 rzędu.
D(ψ) =2I1(ka sin(ψ))ka sin(ψ)
.
Zagadnienie odwrotne:
ogólnie polega na wyliczeniu rozkładu prędkości; w przypadku syntezy an-ten (zbiór anten) polega na wyznaczeniu oprócz parametrów r - odległoscipunktu od środka anteny, a - promienia anteny, także odległości d międzyposzczególnymi antenami.

Rysunek 7.8. Diagram kierunkowy: function D(ψ), ka=1;0 < ψ < π
Rysunek 7.9. Pomiary przy georadarze. Praktyka 2009, student PG Piotr Furmań-ski, profs. Karpov i Bessarab. Kaliningrad, BFU im Kanta.


8
Tomografia komputerowa
Odtwarzanie trójwymiarowej struktury wewnętrznej ciała za pomocą pomia-rów na granice obszaru albo po za granicą. Pre-historia: N. Pirogov (1810-1881)- autor klasycznego atlasu anatomii topograficznej (w trzech kierun-kach), wydanego w latach 1852-1859, sam nazywał łodowym”.
Etymology: Greek tomos section + International Scientific Vocabulary -graphy Date: 1935
: a method of producing a three-dimensional image of the internal structu-res of a solid object (as the human body or the earth) by the observation andrecording of the differences in the effects on the passage of waves of energyimpinging on those structures”
- Webster dictionary”Tomography is imaging by sections or sectioning. A device used in to-
mography is called a tomograph, while the image produced is a tomogram.The method is used in medicine, archeology, biology, geophysics, oceanogra-phy, materials science, astrophysics and other sciences. In most cases it isbased on the mathematical procedure called tomographic reconstruction. Theword was derived from the Greek word tomos which means a section”, a sli-ceór a cutting”. A tomography of several sections of the body is known as apolytomograph”
- Wikipedia: http:/pl.wikipedia.org iki omografiakomputerowa”Pierwszy tomograf, tzw. EMI scanner, został zbudowany w 1968 roku
przez sir Godfreya Newbolda Hounsfielda, z firmy EMI Ltd, z Wielkiej Bryta-nii. Pierwsze urządzenia próbujące wykorzystać idee Radona budowali: w 1961William Henry Oldendorf, w 1963 Allan MacLeod Cormack (Tufts University),w 1968 David Kuhl i Roy Edwards. Wszyscy oni przyczynili się do końcowegoefektu osiągniętego przez Hounsfielda, który jako pierwszy stworzył działającysystem do diagnostyki i zaprezentował jego unikalne możliwości. Hounsfieldi Cormack otrzymali w 1979 roku Nagrodę Nobla za wynalezienie i budowętomografu komputerowego.”[?].
”Źródło promieniowania i detektory poruszają się po okręgu prostopadłymdo długiej osi pacjenta (dookoła obrazowanego narząduóbiektu), wykonując

46 8 Tomografia komputerowa
szereg prześwietleń wiązką promieniowania równoległą do płaszczyzny obra-zowane”,
”Metody analityczne są używane w niemal wszystkich współczesnych to-mografach. Dają one najlepsze wyniki, ale wymagają większych mocy obli-czeniowych.EMI scanner wykonywał obrazy o rozdzielczości 80 x 80 pikseli(6400 równań) z 28 800 projekcji. Współczesne tomografy wykonują nawet do2 000 000 projekcji. Dzięki temu ich rozdzielczość sięga dziesiątków mikrome-trów.”Tomogray stosują się nie tylko w medycine (patrz Rys.8.1).
”The reconstruction of a three-dimensional domain from boundary measu-rements is studied by means of approximation methods when a priori infor-mation encloses the unknown parameters in subdomains such that the directand inverse problem could be given solutions if only one of the subdomainsdid exist. It is shown how the coupling of them can be treated to derive fromthese ‘local solutions’ global ones.”
1. Pierwszym historycznie przykladem jest tomografia rentgenowska.Stosujesie promieniowanie X.
2. Tomografia akustyczna np. aparatura USG, przy użyciu fal dźwiekowych.3. Tomografia NMR (nuclear magnetic resonance) - effect kwantowy. Fale
radiowe.4. Tomografia jest komputerową bo rozwązanie podstawowego równania -
równania Radona - numeryczne.
8.1 Równanie Radona
Podstawowym równaniem tomografii jest równanie Radona (Radon 1917),które powstaje przy zastosowaniu transformacji Radona do prawa Lamberta.Transformacja odwrotna wlasnie używa się dla odtwarzania obrazów którepowstają przy skanowaniu medycznym. Technika transformacji Radona używasię też przy rekonstrukcji map na podstawie pomiarów satelitarnych. (patrz,np. Roulston and Muhleman Synthesizing Radar Maps of Polar Regions witha Doppler-Only Method. Appl. Opt. 36, 3912-3919, 1997). Problem zwiazanyz tomografia dotyczy obrazowania rozkładu gestości badanego obiektu. Dlauproszczenia zagadnienia zajmiemy sie tu problemem dwuwymiarowym (wpłaszczyźnie XY). Uzyskanie poszerzenia na trzy wymiary jest bardzo prostegdyż wystarczy przesuwać otrzymany wynik (metode) dla płaszczyzny wzdłużosi Z (w układzie Kartezjańskim XYZ).
Rozpatrzmy zatem układ osi XY z umieszczonym w środku obiektem(patrz fig. 8.2). Detektory i elementy emitujace promieniowanie X (nie musi tobyć koniecznie promieniowanie X, jednak jest ono czesto używane) przesuwajasie wzdłuż osi l i okrażaja obiekt, kat Θ zmienia sie od 0 do π (czesto stoso-wany jest obieg detektorów dookoła obiektu sprowadza sie to jednak do doko-nania dwóch takich samych pomiarów - dzieki temu można poprawić jakośćpomiaru). Prezentowany tutaj sposób tomografii jest typem absorpcyjnym,

8.1 Równanie Radona 47
bowiem wiazka promieniowania przechodzaca przez obiekt ulega osłabieniu,które jest spowodowane absorpcja (oczywiście osłabienie to może być spowo-dowane takimi procesami jak odbicie czy dyfrakcja promieniowania, jednakdla uproszczenia nie beda one tutaj uwzgledniane).
Dla naszych celów wystarczy prawo Lamberta:
I(l, θ) = I0(l, θ)e−∫L(1,θ)
c(x,y)dx, (8.1)
co oznacza, że wiazka o nateżeniu I0 przechodzac przez próbke ulega osłabie-niu do I.
Całka ∫L(l,Θ)
c(x, y)ds, (8.2)
określa współczynnik absorbcji i jest liczona wzdłuż wiazki promieniowania(na rysunku L) na odcinku pomiedzy detektorem a generatorem. Należy za-uważyć, że gestość obiektu bedziemy chcieli uzyskać we współrzednych Karet-zjańskich.
W najprostszym przypadku jednolitego materiału o grubości d(l, Θ) wdanym położeniu generatora i detektora, całka sprowadza sie do∫
L(l,Θ)
c(x, y)ds = µd(l, Θ), (8.3)
gdzie:µ - współczynnik absorpcyjny obiektu. (należy zwrócić uwage na to, że współ-czynnik absorpcji jest zwiazany najcześciej z gestościa ciała).
Dla uproszczenia (podobnie uproszczenie stosuje sie w praktyce) zakładasie, że generator promieniuje wiazke o stałym nateżeniu I0(l, Θ) = const.Można zatem zapisać:
q(l, Θ) =∫
L(l,Θ)
c(x, y)ds = − lnI(l, Θ)I0
. (8.4)
Poniewaz promien przebiega przez obszar wyznaczany szukana funkcjaf(x,y), mozna zatem poszukiwac metody sumowania wartosci f(x,y) nie po-przez bezposrednie odniesie do promienia (ds) lecz poprzez odniesienie dowspólrzednych szukanej funkcji (dx, dy). Konieczne jest wowczas swoiste wy-bieranie przyrostow dx, dy tylko takich, ktore odpowiadają przyrostom dspromienia. W tym celu stosuje sie w zapisie matematycznym delta Dirace’a;korzystajac z omowionych wlasnosci można przedstawic funkcje rzutu jako:
Zastosowana w powyzszym wzorze podwojna calka wskazuje na sumo-wanie wartosci funkcji f(x,y) dla zmiennych x i y (stad przyrosty dx i dy).Otrzymany w ten sposob wzór przekształcenia nosi nazwę transformacji Ra-dona. Odwrotna transformata Radona może doprowadzic do uzyskania szu-kanej funkcji f(x,y), czyli może stanowic metodę rekonstrukcji obrazu.

48 8 Tomografia komputerowa
Uzyskano w ten sposob szukana funkcje odpowiadajaca macierzy obrazu. Ztransformacja Radona zwiazana jest jeszcze wazna metoda reprezentacji war-tosci funkcji rzutu zwiazanych z wartosciami funkcji szukanej f(x,y). Wykresprzedstawiajacy lokalizacje (tzn. parametry t, f ) dla ktorej istnieje wartoscfunkcji rzutu nosi nazwe śinogram”. W celu wyznaczenia funkcji opisujacejsinogram nalezy dokonac modyfikacji zmiennych we wzorze na transformacjeRadona:l
Wyprowadzona w ten sposób formula umożliwia ukazanie relacji pomiędzyargumentami funkcji rzutu odpowiadającej funkcji szukanej f(x,y).
(x(t), y(t)) =(
(t sinα+ s cosα), (−t cosα+ s sinα))
gdzie s - odległość prostej Łód początku współrzędnych i α - kąt wektoranormalnego do L s osją x (patrz też przestrzeń Hough’a). It follows thatthe quantities (α, s można rozważać jako współrzędnę wszystkich prostych wR2, lecz transformacja Radona może być wyrażona w tych współrzędnych.Transformacja Radona - transformacja całkowa, która definiuje się jako
R(p, τ)[f(x, y)] =∫∞−∞ f(x, τ + px)dx =∫∞
−∞∫∞−∞ f(x, y)δ[y − (τ + px)]dydx = U(p, τ)
(8.5)
gdzie p - nachylenie prostej i τ - jej krzyżowanie. Odwrotna transformacjaRadona
f(x, y) =1
2π
∫ ∞−∞
∂
∂yH[U(p, y − px)]dp, (8.6)
gdzie H transformacja Hilberta:
g(y) = H[f(x)] = 1πv.p.
∫∞−∞
f(x)dxx−y
f(x) = H−1[g(y)] = − 1πv.p.
∫∞−∞
g(y)dyy−x ,
(8.7)
H−1 - transformacja odwrotna. Oznaczenie v.p., ”valeur.principal.” Cau-chy’ego definuje się jako całka niewłaściwa, mianowicze całki
v.p.
∫ ∞−∞
f(x)dxx− y
= limε→0[∫ y−ε
−∞
f(x)dxx− y
+∫ y+ε
−∞
f(x)dxx− y
].
Transformacja Hilberta jest całką niewłaściwa.Inaczej
R′(r,Θ)[f(x, y)] =∫ ∞−∞
∫ ∞−∞
f(x, y)δ(r − xcosΘ − ysinΘ)dxdy
gdzie r - odległość prostej od początku układu współrzędnych, Θ - kąt, stwo-rzonyj wektorem odległości (patrz Fig. 8.2).
Stosujac teraz transformacje Radona otrzymujemy

8.3 Diagnostyka komputerowa 49
∞∫−∞
∞∫−∞
c(x′, y′)dx′dy′√(x− x′)2 + (y − y′)2
= S(x, y) =1π
π∫0
q(x cosΘ + y sinΘ,Θ)dΘ,
(8.8)gdzie l = x cosΘ + y sinΘ jest równaniem prostej L.
Zaznaczmy jądro operatora całkowego jako
K(x− x′, y − y′) =1√
(x− x′)2 + (y − y′)2, (8.9)
otrzymujemy:
∞∫−∞
∞∫−∞
K(x− x′, y − y′)c(x′, y′)dx′dy′ = S(x, y) (8.10)
i jest to równanie całkowe Fredholma pierwszego rodzaju. Czesto (ze wzgleduna postać jadra K) równanie jest nazywane całkowym równaniem splotowym.Wynika to z definicji splotu:
(K ∗ f)(x) =
∞∫−∞
K(x− y)f(y)dy. (8.11)
Zatem równanie można zapisać w formie:
(K ∗ c)(x, y) = S(x, y). (8.12)
8.2 Rozwiazanie Radona
W 1917:
c(x, y) = − 12π2
∫ π
0
∫ ∞−∞
∂q(l, θ)∂l
dl
l − x cos θ − y sin θ. (8.13)
Równanie to jest bardzo niestabilne i dlatego podstawy tomografii nie opierajasie na nim. Pierwsza próbą laboratoryjnej realizacji tomografii wykonał Tjurinw ZSSR w roku 1956. W 1980 skonstrowano tomgraf II generacji na podstawierównania (8.13) i metody Arsenina.
8.3 Diagnostyka komputerowa
W diganostyce komputerowej rozwiazujemy trzy zagadnienia odwrotne (źró-dło,gestość,odbiór) oraz aby mieć dokładniejsze pomiay pracujemy na kilkuczestotliwośćiach.
Matematyka zjawiska:

50 8 Tomografia komputerowa
1. Żródło promieniowania – fala, która dociera do aparatu wychodzi ze żró-dła ulega rozproszeniu. Jest to spowodowane niedoskonałośća aparatury.
Bu = v,
B – operator aparatu,u – pole aparatu,v – obserwacja.
2. Równanie tomografii – szukamy gestości.
Az = u,
A – operator ciała,z – gestość,u – pole.
3. Wizualizacja (wyniki na papierze, ekranie).
Dw = z,
D – własniść ekranu,w – funkcja jasności,z – gestość.
Przy tych warunkach problem diagnostyki komputerowej jest rozwiazanietrzech rownań cłlkowych pierwszego rzedu.
W tomografie komputerowym obrobka danych pomiarowych jest zautoma-tyzowana. Stosuje sie Algorytmy i programy komputerowe. Stabilne rozwiazaniaosiaga sie poprzez metode regularyzacji.
µ(x, y, E), gdzie E - eneria fotonu. Żeby system skanowania został nie-zmiennym, powinnyśmy wprowadzić efektywny wspolczynnik absorbcji. Inte-sywność wynośi ∫
L
∫ E2
E1
κ(E)µ(x, y, E)dEds = p(l, θ), (8.14)
gdzie: κ - gestość spektralna.Na równaniu (8.14) oparte sa eksperymenty komputerowe. Akceptujac
κ(E)µ(x, y, E), budujemy p(l, θ), która pozwala ocenić q(l, θ) po K(l).Równanie aparatu:∫∫
H(x− ξ, y − η)w(ξ, η)dξdη = z(x, y), (8.15)
q → s → c → w otrzymujemy na bazie poprawionych danych o I0 operatoraBu = vTomografia - procedura skanowania.

8.3 Diagnostyka komputerowa 51
8.3.1 Rezonans magnetyczny NMR. Tomografioa resonansowa.
Obrazowanie magnetyczno-rezonansowe (MR) opiera się na zjawisku jądro-wego rezonansu magnetycznego. Ivanov V.A.: Śposób określenia budowywewnetrznej objektu materialnego”Patent 21.03.60 [?].
Jądro atomu j o momencie magetycznem µj w stałym polu magnetycznem
hν12 = E2 − E1
– dla dobranej (rezonansowej) wartości ν12 osiagamy różnicy poziomów ener-getycznych.
Cytat: Some have fractional spins (e.g. I = 12 ,
32 , ....), and a few have no
spin, I = 0 (e.g. 12C, 16O, 32S, ....). Isotopes of particular interest and useto organic chemists are 1H, 13C, 19F and 31P, all of which have I = 1
2 . ‘Theearth’s magnetic field is not constant, but is approximately 10−4 T at groundlevel. Modern NMR spectrometers use powerful magnets having fields of 1 to20 T. Even with these high fields, the energy difference between the two spinstates is less than 0.1 cal
mole . To put this in perspective, recall that infraredtransitions involve 1 to 10 kcal
mole and electronic transitions are nearly 100 timegreater.”ttp : /www2.chemistry.msu.eduacultyeuschirtTxtJmlpectrpymrmr1.htm
U ∼ µj ·B0,
B0 ‖ z,
µjz ·B0 = Uj ,
Energia (Hamiltonian) jest sumą
H = H0 +Hj ,
Moment magnetyczny jądra jest proporcjonalny do spinu (momentu mecha-nicznego)
µj =e
2mcs.
Więc częstotliwośc rezonansowa zależy od wartości stałego pola magnetycz-nego B0 i momentu bezwładności I:
ν =µB0
hI.
Wyprowadzona z położenia równowagi magnetyzacja precesuje wokół kie-runku pola głównego a ruch ten może być obserwowany. Rozważmy równanieBlocha dla momentu magnetycznego:
M =∑j
µji.

52 8 Tomografia komputerowa
Według którego predkość zmian M w czasie jest sumą precesji i relaksacji:
dMdt
= γ[M×B0] +Mz −M0
T1ez +
Mxex +My ejT ∗2
, (8.16)
γ - czastotliwość Larmora,T1 - czas relaksacji spin-sieć (kryształ, otoczenie),T ∗2 - czas relaksacji spin-spin,ciecz: T1 ∼ T ∗2 ,kryształ: T1 T ∗2 .To równanie umożliwia policzenie relaksacji.Szczerokość T ∗2 + wysokość to gestość.Problem - określenie gestosći perwiastków pewnewgo gatunku.Promieniujemy polem elektromagnetycznym (radiowym): Pole niejednorodneBz = gzz - różne czestotliwośći.
Sω = A
∫c(x, y, z) exp[iγ(gxx+ gyy + gzz)]dxdydz, (8.17)
gxx + gyy + gzz = ω - pomiary. Obrazowanie MR może być przeprowadzonew różnych sekwencjach. Pozornie nieznaczne zmiany w ustawieniu podsta-wowych parametrów obrazowania mogą doprowadzić do uzyskania nieco od-miennych danych, mających różne możliwości diagnostyczne. Ze względu naparametry podstawowe, metody obrazowania dzieli się na:
obrazy T1-zależne (zob. ilustracja), najlepiej oddające wizualnie strukturęanatomiczną mózgu, gdzie istota biała jest ukazywana w jasnych kolorach, zaśistota szara w ciemnych, płyn mózgowo-rdzeniowy, ropień i guz na ciemno, amiąższ wątroby na jasno.
obrazy T2-zależne, na których istota biała ukazywana jest w ciemniejszychbarwach, zaś istota szara – w jaśniejszych, płyn mózgowo-rdzeniowy, guz,ropień, naczyniak wątroby i śledziona – na jasno, a wątroba i trzustka – naciemno.
FLAIR (ang. Fluid Light Attenuation Inversion Recovery), pewna mody-fikacja sekwencji T2-zależnej, gdzie obszary z małą ilością wody ukazywanesą w ciemniejszych barwach, zaś obszary z dużą ilością wody – w jaśniejszych.Obrazowanie w tej sekwencji znajduje dobre zastosowanie w wykrywaniu cho-rób demielinizacyjnych.
Obrazowanie dyfuzyjne mierzy dyfuzję molekuł wody w tkance. Wyróżniasię tutaj następujące techniki: obrazowanie tensora dyfuzji (ang. DTI – diffu-sion tensor imaging), które może być zaadaptowane do obrazowania zmian wpołączeniach istoty białej, oraz obrazowanie zależne od dyfuzji (ang. DWI –diffusion-weighted imaging), które wykazuje się dużą skutecznością w obrazo-waniu udarów mózgu.

Rysunek 8.1. BFU im. Kanta. Tomograf rentgenowski badań nanostrukturalnych.

Rysunek 8.2. Schemat procesu skanowania (wzdłuż osi l zachodzi skanowanie,układ obraca się wokół środka układu współrzędnych)
Rysunek 8.3. —Delta E jako funkcja indukcji pola mahetycznego

9
Przetwarzanie sygnałów
9.1 Obróbka sygnałów
Jak już zostało stwierdzone, w radiolokacji, spektroskopii, tomografii, hydro-akustyce, grawimetrii, etc. ważna jest interpretacja pomiarów pośrednich. Re-zultatem matematycznym tego opracowania zostało wprowadzenie równaniaoperatorowego (macierzowego, całkowego, różniczkowego).Rozwiązanie wymaga wykorzystania: zasad wariacyjnych, równania funkcjo-nałów; wykończenie – tworzenia odpowiednich procesorów.
TEORIA PROCESORÓW
obróbka sygnałów (rozpraszanie, szum) interpretacja danych przy rozwiązywaniu problemów matematycznie – klasa problemów o postaci (9.1)
y = M(x); x =?, y =?, M − operator. (9.1)
Zakładamy ponadto, że fala jest płaska, M jest doskonałym operatorem(narzędzie badające jest idealne).
Rozważmy wyjście układu pomiarowego (WUP) - anteny, mikroskopu,aparatu fotograficznego. Niech sygnał wejściowy (SW), p - charakterystykapromeniowania jakegoś typu - intensywność w optyce, kąt w radarze, współ-rzędna liniowa w fotografii, częstotliwość w spektroskopii.
ANTENAodbiornik: hydroakustyka, radary;- wyjście układu pomiarowego (WUP);- sygnał wejściowy (SW) zależy od p, gdzie p-parament reprezentujący zmiennenarędzia (np. kąt, charakterystyka kierunkowa; radar skaluje w zmiennych kie-runkach).

56 9 Przetwarzanie sygnałów
SW moze być stochastycznie (przypadkowo) zmienny, ciągły lub dys-kretny; zależnie od technicznej budowy anteny. Niech SW przechodzi przezWUP (filtry częstotliwości, detektor kwadratowy, narzędzie magazynujące).
Sposób na pozbycie się szumu:f - funkcja skanowania w radarach,
R ∗ p = f, p ∈ P, f ∈ F, R ∈ ρ,P, F, ρ− pewne przestrzenie,
F,R, ρ− teoretyczne wartości. (9.2)
R ∗ p = f , p ∈ P , f ∈ F , R ∈ ρ,P , F , ρ− pewne przestrzenie,
F , R− doświadczalne wartości. (9.3)
W powyższych przestrzeniach ważna jest norma; oceniamy odchylenie warto-ści prawdziwych od obserwowanych. Normy:
‖p‖q, ‖f‖F , ‖R‖ρ. (9.4)
Indeksy oznaczają, że odchylenia od norm mogą być różne. Zakładamy np. żeodchylenie w danych pomiarowych jest oceniana przez normę wektorową:
‖f − f‖F < δ. (9.5)
Natomiast norma operatorowa ocenia (szacuje) błędy przy określeniu samegooperatora:
‖R− R‖ρ < ξ. (9.6)
Obróbka jest elementem narzędzia, a wiedza o narzędziu jest obarczonabłędami. W mechanice kwantowej mamy mikroskop tunelowy (kwantowe na-rzędzie pomiarowe), więc w mikro- i nanotechnologiach spotykamy się ze spe-cyficzną obróbką danych pomiarowych.
9.2 Klasyfikacja obróbki sygnałów
Obróbka pierwotna (pozbawianie szumu).Problem obecności informacji (sygnału)- istnieje wskazówka, że obecne jest źródło sygnału które wytwarza dane(szum), np. antena radiowa.
Obróbka wtórna (określenie parametrów sygnału). Sformulujemy zagad-nienie matemtyczne:a) zmienna ciągła (j -numer źródła)
f(ϑ) =N∑j=1
k(ϑ, ϑj)Aj + δf. (9.7)

9.2 Klasyfikacja obróbki sygnałów 57
Rysunek 9.1. Widmo ciągłe, np. jonosonda.
b) zmienna dyskretna
fν(ϑ) =N∑j=1
kν(ϑ, ϑj)Ajν + δfν , (9.8)
k(ϑ, ϑj) - charakterystyka kątowa (kierunkowa) po mocy,ϑi- kąt celu, νi - częstotliwość,Ajν - amplituda, δf - szum.
Zagadnienie: uzyskanie liczby źródeł N , kątów ϑi, amplitud Aj (jedna zdostępnych metod to metoda Andersona).
Rozpoznawanie celów (klasyfikacja).
Rysunek 9.2. S1-sygnał szerokopasmowy, S2-sygnał wąskopasmowy, S3-sygnał po-żyteczny.

58 9 Przetwarzanie sygnałów
9.3 Metody obróbki wtórnej
Metoda Andersona
Kompensacja matematyczna domieszek na wyjściu kanałów lokalnych, sygna-łów przeszkadzających.Rozważamy antenę o dowolnym kształcie. Zaznaczamy:A− amplituda, ϑ′ − kąt,
f(ϑ) =N∑j=1
k(ϑ, ϑj)Aj . (9.9)
Mamy infomacje dodatkową o jednym ze źródeł (np. z innych pomiarów).
Am ∼ ϑm,
Am ≈ f(ϑ′m),
f = f − k(ϑ, ϑ′m)Am,
f → f – kompresja koherentna.
Wady: oszacowanie An (przybliżenia); słabe rozdzielenie bliskich sygnałów.
Metoda adaptacji
np. telewizor (starsze modele)Dopasowanie filtra do częstotliwości, wprowadzenie do anteny odpowiednichfiltrów (Rysunek 9.3).
Rysunek 9.3. Dopasowanie filtra.
Antena: łańcuch elementów przetwarzających (Rysunek 9.4)odpowiednie dopasowanie do sytuacji 7→ sterowanie charakterystyką kierun-kową 7→ procesory.

9.3 Metody obróbki wtórnej 59
Rysunek 9.4. a) łańcuch anten o pewnych charakterystykach kierunkowych, b)przed korektą, c) po korekcie.
Algorytm Frost’a (1972)
Rozważmy macierz M × J wag:
WT=
kierunek 1, w1, ..., wM ;2, wM+1, ..., w2M ;J, wN−M+1, wn.
Co ∆ sekund mierzymy wartości potencjałów.Próbka, jako pomiar; szereg pomiarów na każdym połączeniu; wektor poten-cjałów.
XT (k) = [x1(k∆), x2(k∆), ..., xN (k∆)],
N = JM – macierz wartości charakteryzujących elementy anteny,
X(k) = L(k) +N(k),
L-sygnał, N -szum.Korelacja:
Rxx = E[X(k), XT (k)], (9.10)
RNN = E[N(k), NT (k)], (9.11)
RLL = E[L(k), LT (k)], (9.12)
gdzie E[·] to średnia po k.Załóżmy, że szum jest procesem przypadkowym (stochastycznym).

60 9 Przetwarzanie sygnałów
E[N(k), LT (k)] = 0.
Zakładamy brak korelcji.Na wejściu anteny: sygnał + szum.Na wyjściu anteny (z uwzględnieniem wszystkich kierunków):
y(k) = WTX(k) = XT (k)W, (9.13)
E[y2(x)] = E[WTX(k)XT (k)W ] = WTEX(k)XT (k)W = WTRxxW,(9.14)
gdzie:y2(x) - intensywność sygnału,WTRxxW - funkcja korelacji.Algorytm uwzgłędnia następujące ograniczenia:
CTj W = fj ,
Cj – kolumna macierzy ograniczeń dla kierunków j=1,...,J .Cel: minimalizacja szumu i sygnałów z jednego kierunku przeszkadzającychodbierać sygnał w drugim kierunku (zagadnienie problemu optymalizacji).
9.4 Zagadnienie problemu optymalizacji
Rozwiązanie metodą współczynników Lagrange’a:
Woptymalne = R−1xx c(c
TR−1xx c)
−1F,
cTW = F,
F = (f1, ..., fJ).
Powstaje optymalny wektor realizujący szereg warunków.MSKBO - minimalny średni kwadrat błędu z ograniczenia.
yopt = WToptX(k).
- założnie: odchylenie kwadratowe jest minimalne;- średnia jest zerowa ale kwadrat średniej nie jest.

9.5 Zagadnienie problemu redukcji 61
9.5 Zagadnienie problemu redukcji
SYGNAŁ RZECZYWISTY → SYGNAŁ POMIAROWY
Zagadnienie problemu redukcji :
niedoskonałości aparatury (skończona chcarakterystyka komputerowa) szumy (nie do końca wyeliminowane po skończonej ilości operacji) niedoskonałości matematyczne
Możliwości sprowadzenia sygnału pomiarowego do doskonałości:
Ulepszenie narzędzi: zwiększenie anteny, lepsza charakterystyka kierun-kowa
Obróbka matematyczna - Reyleigh
Ay = f,
y - sygnał doskonały, f - sygnał uzyskany doświadczalnieproblem redukcji...
Przykład (Sizikow):
U(Ψi) =N∑j=1
AjR(Ψi, Ψj) + F + δU, (9.15)
i = 1, ...,M ,
F – szum zdeterminowany,δU – szum przypadkowy.Układ nieliniowy względem Aj , Ψj , F,N
R(Ψ, Ψ ′) = e−15(Ψ−Ψ′)2
0,1(Ψ−20)2+100 . (9.16)


10
Rozwiązanie zagadnień odwrotnych. Metodyregularyzacji.
10.1 Klasyfikacja równań całkowych
Rozpatrywać będziemy tylko równania całkowe jednej zmiennej. O funk-cjach ϕ(x), f(x) zakładać będziemy, że są one określone i ciągłe na odcinku[a, b], x ∈ [a, b], i, odpowiednio x ∈ [c, d] natomiast o funkcji K(x, s) zakła-damy, że jest ona określona i ciągła w prostokoncie [a, b] × [c, d], x ∈ [a, b],s ∈ [c, d]. Funkcje f(x) oraz K(x, s) są funkcjami danymi i nazywane są od-powiednio funkcją danych oraz jądrem równania całkowego.
Równania całkowe, w których obie granice całkowania są stałe, nazywa sięrównaniami całkowymi Fredholma, jeżeli natomiast tylko jedna z granic całko-wania jest stałą, mówimy o równaniu całkowym Volterry. Równania całkowemożna dodatkowo sklasyfikować według następującego kryterium: jeżeli funk-cja niewiadoma występuje jedynie pod znakiem całki to mówimy o równaniucałkowym pierwszego rodzaju, jeżeli natomiast funkcja niewiadoma występujenie tylko pod znakiem całki, ale jeszcze w jakiś inny sposób, to równanie takienazywamy równaniem całkowym drugiego rodzaju. Poniżej przedstawiona jesttaka właśnie klasyfikacja:
równanie całkowe Fredholma pierwszego rodzaju
λ
∫ b
a
K(x, s)ϕ(s) ds = f(x), (10.1)
dlja x ∈ [c, d], równanie całkowe Fredholma drugiego rodzaju
ϕ(x)− λ∫ b
a
K(x, s)ϕ(s) ds = f(x), (10.2)
równanie całkowe Volterry pierwszego rodzaju
λ
∫ x
a
K(x, s)ϕ(s) ds = f(x), (10.3)

64 10 Rozwiązanie zagadnień odwrotnych. Metody regularyzacji.
równanie całkowe Volterry drugiego rodzaju
ϕ(x)− λ∫ x
a
K(x, s)ϕ(s) ds = f(x), (10.4)
przy czym λ jest pewnym parametrem, w ogólności zespolonym. W przypadkugdy f(x) 6= 0 mówimy o równaniu całkowym niejednorodnym, natomiast gdyf(x) = 0, o równaniu jednorodnym.
Korzystając z klasyfikacji wprowadzonej przez Hadamarda okazuje się, żerównania pierwszego rodzaju Fredholma oraz Volterry, (10.1) i (10.3), są czę-sto zagadnieniami źle uwarunkowanymi (ill posed), natomiast równania dru-giego rodzaju Fredholma i Volterry, (10.2) i (10.4), są już zagadnieniami do-brze uwarunkowanymi.
Operator całkowy
Równania całkowe można również zapisać, korzystając z operatora całkowego,którego jądrem jest funkcja K(x, s). Dla przykładu, równanie, które definiujetaki operator dla równań typu Fredholma, ma postać
Kϕ(x) =∫ b
a
K(x, s)ϕ(s) ds. (10.5)
W konsekwencji równanie Fredholma pierwszego rodzaju przyjmie postać
Kϕ(x) =1λf(x), (10.6)
natomiast równanie Fredholma drugiego rodzaju zapiszemy jako(1− λK
)ϕ(x) = f(x). (10.7)
10.2 Analiza signałów jako problem źle uwarunkowany.Monitorowanie
Rozważmy równanie całkowe z popszedniego rozdziała.∫ b
a
R(Ψ, Ψ ′)ρ(Ψ)dΨ ′ = U(Ψ) (10.8)
Zakładamy, że F i δU udało się pozbyć za pomocą signal processing (np.metody Frosta)F = 0 i δU = 0

10.3 Przykłady kłasyczne 65
rezultat:kody numeryczne obróbki sugnałów (krzywe)
Monitorowanie wymaga:1. Odpowiedniego modelu matematycznego procesu2. Stabilnego algorytmu i metody jego rozwiązania3. Kodów numerycznych
10.3 Przykłady kłasyczne
Problem algebraiczny. Przykład z elektrodynamiki.Teza: Siła Lorentza określa pole magnetyczne
FL =e
c[v ×B], (10.9)
Równoważny układ równań:
FLx =e
c[vyBz − vzBy], ... (10.10)
Mierzymy składowy FLx FLy FLz i vx vy vz;stąd chcemy wyznacic: Bx By Bz(struktura wzoru: F=AB, A - to macierz kwadratowa 3x3, F i B - kolumny)Liczymy ze wzorów Cramera. Wyzacznik A wyzeruje się automatycznie przydowolnych składowych prędkosci. Rozwiązanie niejednoznaczne. Obserwu-jemy brak informacji - problem jest zle uwarunkowany.
Uwaga: W przypadku uwzględnienia blędów pomiarowych możemy trafićna NIEZEROWĄ wartość wyznaczniku, mianowicie - układ śię rozwiązuje”!Ale dostajemy zupełnie nie wiarygodne wartosci składowych pola magnetycz-nego. Latwo blędy zasimulować.
Brakujące informacje uzupełniamy danymi z dodatkowych eksperymen-tów. Naprzykład - jeszcze jeden pomiar z innej prędkośiu v′ daje już szeszczrównań, teraz juz rozwiązanie , ogólnie, uwzgledniając błędy, nie istneje.
Stosujemy metodę Gaussa.
Przykład zadania: wzór Ampera ∫l
Bdl = I. (10.11)
Chociaż jest źle uwarunkowane, możemy je rozwiązać, zakładając symetrię.
B = Bτ , τ -wektor styczny do krzywej∫l
τdl = B
∫ 2π
o
dl. (10.12)

66 10 Rozwiązanie zagadnień odwrotnych. Metody regularyzacji.
10.3.1 Metoda Gaussa
Historia: rozważmy problem wyznaczenia parametrów orbity planety.Elipsa też może byc modelem, jeżeli znamy jej parametry...
Aiz = ai1z1 + ...+ aimzm = Ui (10.13)
pomiar w czasie tiUi reprezentuje pomiaraik też wartości mierzone (parametry położenia punktu obserwacji)i = 1, ..., n, n > mRównań jest więcej niż zmiennych; rozwiązanie ogólnie nie istneje.
W takim razie na podstawie matematyki klasycznej wprowadzamy z0 repre-zentujący położenie.
Przykłady z rozdziałów poprzednich doprowadzili do równań całkowychliniowych I rzędu. W przypadku równania Fredholma∫ b
a
K(x, s)φ(s)ds = f(x), x ∈ [c, d] (10.14)
po dyskretyzacji b−an = h, sj = a + jh, j = 0, ..., n; d−cm = τ, xi = c + iτ, i =
0, ...,m mamyn∑j=0
K(xi, sj)hφ(sj)ds = f(xi), (10.15)
odżymaliszmy układ rownań liniowych z macierżą n + 1 × m + 1, ogólnieniekwadratowej
Kij = K(xi, sj)h. (10.16)
Rysunek 10.1. Macierz K po dyscretyzacji (10.16)

10.3 Przykłady kłasyczne 67
Metoda Gaussa opiera sie na funkcje (jesli n→∞ - funkcjonał)√∑i
(Ui −Aiz0)2 = ‖∑i
(Ui −Aiz0)‖ = ‖h0‖ (10.17)
szukamy z0 żeby ‖h0‖ było minimalne:min‖h0‖ ⇒ z0
Doświadczenie wskazuje na to, że jest kilka rozwiązań z0i. Zbiór rozwiązańtworzy przestrzeń liniową.
z0 → z′0 =∑Si=1 Ciz0i z
′0 ∈ ZS
‖zn‖ = min‖z′‖, zn-wektor normalny (rozwiązanie normalne)
Metoda najmniejszych kwadratów (Gauss) nie pozwala na pozbycie się niere-gularności.
z0 ∼ min‖Ui −Az‖2(A,U) nie może być podstawą dla stabilnego algorytmu
z1 + 7z2 = 5 (10.18)√
2z1 +√
98z2 =√
50 (10.19)
stądz2(7√
2−√
98) = 5√
2 =√
50 (10.20)
W obliczeniach numerycznych mamy√
2 tylko z pewną dokładnością: 10−n
z1|0, .|1, 6|5, .n|100|300|500
Poprosiłem rozwiązać ten system SWP:
x√
2 + y√
98 = 5
x + 7y =√
50
Cytat:, Solution is:
[x = −8. 170 0× 1028, y = 1. 167 1× 1028
]Typowy przykład analityczny:
z1 + z2 = 1(1 + µ)z1 + z2 = 1 + δz1 = δ
µ , z2 = 1− δµ ; δ, µ - dokładność

68 10 Rozwiązanie zagadnień odwrotnych. Metody regularyzacji.
Zwiększając dokładność, szkodzimy stabilności wyników!
Jeżeli układ ma rozwiązanie (ściśłe) to rozwiązanie uogólnione i ścisłe po-krywają się
Koncepcja musi być uniwersalna
Tw. 1 (Tikhonow 1985) Nie ma żadnego stabilnego rozwiązania układurównań liniowych jedynie na bazie informacji o indywidualnych poszerzonychmacierzach Anm, Un.
Żadna obróbka danych opartych na A i U nie daje stabilnego rozwiązania(żaden algorytm)
Rozważmy macierz indywidualnie poszerzoną parametrycznie (MIPP)Poszerzenie może zmienić jakościowo układ równań.
Tw. 2 (Tikhonow 1985) Podana MIPP [A,U,A0] pozwala określić sta-bilne równania uogólnione (RU)∆0 = (δ0, µ0)δ0-dokładność pomiaru A, µ0-dokładność pomiaru U
Dowód metody opiera sie na sformułowaniu fizycznym (wiedza a priori)
Wyniki regularyzacji przykładu:
Niech zS , zR, zN (wektory) są: ścisłe, reguralne, normalne.
Poszerzona macierz:Rozważmy MIPP ∆0 = (δ0, µ0) - parametry poszerzeniaklasa macierzy:
‖U−U′‖ ¬ δ0 (10.21)
‖A−A′‖ ¬ µ0 (10.22)
A, U są równoważne w stosunku do dokładności
Az = U
Wprowdźmy parametr stabilizujący δ
Aδ ∈ AKażdy parametr regularyzacji wprowadza pewną macierz A

10.3 Przykłady kłasyczne 69
Istneje wielu sposobów na relaryzacje (stabilizacje) patrz np. [?].1. Przykład. Dyskretna transformacja Fouriera.Transformacja ciągła - patrz rozd. 4, wzór (4.6). Zapiszmy odpowiednik
dla czasowego procesu
Y (ω) =1√2π
∫ ∞−∞
exp[ωt]y(t)dt. (10.23)
Możliwa regularyzacja
Y (ω) =1√2π
∫ ∞−∞
exp[ωt]y(t)
1 + αt2ndt, (10.24)
α - parametr regularyzacji. Patrz obrazki w [?].Dyskretyzacja:
tk = kh
na odczynku Nh.UwzgliędniamyTwierdzenie Kotelnikova (sampling theorem) [?, ?] o maksymalnej
dyskretyzacji f < fm, fmh = 1 - podobnie relacji Heisenberga .Wiki. angl.: ”If a function x(t) contains no frequencies higher than B cps,
it is completely determined by giving its ordinates at a series of points spaced1
2B seconds apart.”polski: ”Twierdzenie Kotielnikowa-Shannona, znane również jako twier-
dzenie Whittakera-Nyquista-Kotielnikova-Shannona lub twierdzenie o prób-kowaniu, mówi o tym, kiedy z sygnału dyskretnego x?(t) złożonego z próbekdanego sygnału ciągłego x(t) można wiernie odtworzyć sygnał x(t) . Jest tofundamentalne twierdzenie teorii informacji, telekomunikacji oraz cyfrowegoprzetwarzania sygnałów, ponieważ opisuje matematyczne podwaliny procesówpróbkowania sygnałów oraz ich rekonstrukcji.”
Więc fj = i fmN = j 1hN , ωj = 2πfj dyskretny analog (10.23)
Yj = Y (ωj) = h
N=1∑k=1
yk exp[2πifjkh] = h
N=1∑k=1
yk exp[i2πjk
N], (10.25)
podobnie - odwrotne.Wniosek. Udało sie pozbyć położenia węzłów tk, zostają tyko numery k, co
doprowadza do szybkiej transformacji F (Fast Fourier Transform - Cooley-Tukey algorithm), są programy standardowy z N = 2m.


11
Algorytm aproksymacji całkowej, metodaregularyzacji Tikhonowa
11.1 Metoda Regularyzacji Tichonowa
11.1.1 Regularyzacja metody Fouriera.
Zagadnienie obliczenia TF jest typowym zle uwarunkowanym, bo pochodzi zrównania całkowego Fredholma I rodziaju. Rozwiązanie jest jawnym, ale cza-sem też potrzebuje regularyzacji. Przykładem regularyzacji może byc wpro-wadzenie obczynania z parametrem α (regularyzacja Tikhonova rzędu n):
Y (ω) =1√2π
∫exp[ωt]y(t)1 + αt2n
dt. (11.1)
Przykładowe obliczenia ilustrowany w [?].Ogólnie metoda opiera się na danych a priori, w formie matematycznej, np.
że funkcja poszukiwana z(t) jest funkcją ciągłej, albo gładką (istnieje z′ = dzdt ).
Takie założenia ogólne związane są z fizyką
11.1.2 Methoda Moore-Penrose.
Rozważmy równanie macierzowe o wielu rozwiązaniach
Ax = y, x ∈ Rn, y ∈ Rm, (11.2)
gdzie A - macierz prostokątna m x n, m¡n. Więc II warunek Hadamarda niejest spełniony.
Definicja Rozwiązanie nazywa się normalnym, jeśli
‖x‖2 = min. (11.3)
Można udowodnic, że rozwiązanie (11.3) oraz równania (11.2, istneje i dajesię wzorem

72 11 Algorytm aproksymacji całkowej, metoda regularyzacji Tikhonowa
x = AMP y, albo AMPAAMP = AMP (11.4)
macierz n×m pseudoodwrotna Moore-Penrose’a AMP znajduje się jako roz-wiazanie
A = AAMPA. (11.5)
Są lepsze algorytmy: patrz, np. [?].Wiki:”In mathematics, and in particular linear algebra, the pseudoinverse AMP
of an matrix A is a generalization of the inverse matrix. More precisely, thisarticle talks about the Moore-Penrose pseudoinverse, which was independen-tly described by E. H. Moore in 1920 and Roger Penrose in 1955. Earlier,Fredholm had introduced the concept of a pseudoinverse of integral operatorsin 1903. The term generalized inverse is sometimes used as a synonym forpseudoinverse.”
11.1.3 Metoda Tikhonova. Pzykład regularyzacji w L2
Wiki: ”Tikhonov regularization, named for Andrey Tikhonov, is the mostcommonly used method of regularization of ill-posed problems. In statistics,the method is known as ridge regression”.
Rozważmy równanie Fredholma I rodzaju na x ∈ [c, d],∫ b
a
K(x, s)φ(s)ds = f(x), (11.6)
albo w postaci operatorowejKφ = f.
Można powiedzeć że metoda Tikhonova łączy podejszcze Gaussa i Moore-Penrose’a. Mianowicze poszukuje się minimum sumy kwadratu odległości inormy z wagą α
Tα[φ] = α‖φ‖2 + ‖Kφ− f‖2. (11.7)
Def. 1. Funkcjonał Tikhonova w L2. Według definicji normy przez iłoczynskalarny w przestrzeni Hilberta φ ∈ L2[a, b],
‖φ‖2 = (φ, φ) =∫ b
a
φ2(s)ds,
więc, zakładajac żeKφ, f ∈ L2[b, c],
przepisujemy (11.7) jako
Tα[φ] =∫ d
c
[∫ b
a
K(x, s)φ(s)ds− f(x)]2dx+ α
∫ b
a
(φ2(s))ds. (11.8)

11.1 Metoda Regularyzacji Tichonowa 73
Dyskretyzacja funkcjonała (11.8) na siatkie x = c + hi, s = a + τj, h =d−cm , τ = b−a
n ; φ(a + τj) = φj , f(c + hi) = fi,K(c + hi, φj) = Kij , i =0, 1, ...m; j = 0, 1, ..., n. daje funkcje (funkcjonał) zmiennych φj , które repre-zentuje funkcje poszukiwaną
Tαd =m∑i=1
h[τn∑j=1
Kijφj − fi]2 + α
n∑j=1
τφ2j , (11.9)
gdzie α nazywa się parametrem regularizacji (może być współczynnik macie-rzowy).
Koniecznym warunkiem minimum funkcionała discretyzowanego (funkcji(11.9)) jest układ rownań Eulera który powstaje po rózniczkowaniu względemφj i przyrównaniu do 0.
∂Tαd∂φj
= 0. (11.10)
Odrzymujemy :
m∑i=1
n∑j=1
hτKijKikφj + αhφk −m∑i=1
hKikfi = 0. (11.11)
Postacz macierzowa rozwiązania
φ = (KTKhτ + αI)−1KThτf. (11.12)
Dobrze widać, że równanie Eulera (11.11) i go rozwiązanie dązy do równańteorii Gaussa kiedy α→ 0.Wiki: ”The pseudoinverse matrix can be computed via a limiting process:
AMP = limα→0[ATA+ α]−1 (11.13)
if the limit exists. (see Tikhonov regularization). These limits exist even if(AA * ) - 1 and (A * A) - 1 do not exist.”Wybór α
Różne metody wyboru (patrz załącznik).
Oszacowanie za pomocą przykładów testowych. Schemat: wybieramy funk-cje φ0 którą łatwo scałkować. Obliczamy odpowiednie
f0(x) =∫ d
c
K(x, s)φ0(s)ds. (11.14)
Po f0 wyliczamy φ(α) = (KTKhτ + αhI)−1KThf0 Funkcjonał odchyleń
δ(α) = ‖φ0 − φ(α)‖2 (11.15)

74 11 Algorytm aproksymacji całkowej, metoda regularyzacji Tikhonowa
jest minimalnym, jeślidδ(α)dα
= 0.
- jest równaniem dla α. Na bazie tego stwierdzenia Prowadzenie eksperymentów numerycznych, wypracowana technologia ta-
kich eksperymentów, symulacja. Metoda iteracyjna, kolejne przybliżenia zα → z
z-istotne rozwiązanie fizyczne. Oszacowanie za pomocą nierownosci matematycznych (patrz załącznik)
11.1.4 Warunki brzegowe
Dopuszczmy funkcja poszukiwana na x ∈ [a, b] spełnia warunki
φ(a) = φ(b) = 0, (11.16)
taką wiedzę powinnyśmy uwzgłędnić przy tworzeniu funkcjónałów i definicjiprzestrzeni.
Naprzykład, takie założenie oznacza że po dyskretyzacji suma już nie obe-lmuje punkty a,b:
Tαd =m∑i=1
h[τn−1∑j=2
Kijφj − fi]2 + α
n∑j=1
τφ2j , (11.17)
bo φ(a) = φ1 = 0, φ(b) = φn = 0. w przypadku innych warunków brzegowychpowinnyśmy podstawić wartosci φn jako funkcje φn−1 oraz φ1 jako funkcjeφ2. Odpowiednio będzie mniej równań Eulera.
11.1.5 Następny przykład - przestrzeń Soboleva
Rozważmy‖z, z′‖W 1
1= max z +max z′. (11.18)
t ∈ [a, b].Inaczej, z, z′ ∈ W 1
2 - przestrzeń Sobolewa (z pochodną z′; index - 1 - rządpochodnej, index 2 odzwierciedla sposób wprowadzenia normy:)
‖z, z′‖2W 12
=∫ b
a
[z2(s) + z′(s)2]ds. (11.19)
Rozważmy równanie całkowe Fredholma I rzędu:
Az ≡∫ b
a
K(x, s)z(s)ds = U(x), (11.20)

11.1 Metoda Regularyzacji Tichonowa 75
jądro K(x, s) ciągłe na prostokącie a,b,c.Norma operatora - uogólnienie normy (Frobeniusa) prostokątnej macierzy A:
‖A‖2L2 = Tr(ATA),
mianowicze
‖K‖2L2 =∫ c
b
∫ b
a
K(x, s)K(s, x)(s)ds. (11.21)
Dopuszczmy ze wiemy (a priori) że ścisłe rozwiązanie jest elementem W 12 :
zs ∈W 12
i przybliżone Uδ ∈ L2[c, d],
‖Uδ − U‖Lz ¬ δ, (11.22)
gdzie Uδ-rozwiązanie przybliżone, U,Kh(x, s)-wyniki pomiarów. Przy czym
‖K −Kh‖L2 ¬ h⇒ ‖A−Ah‖W 12→L2 ¬ h
A-operator całkowy
Stwierdzenie o zbieżności jednostajnej aproksymacji przy założeniuW 12 [a, b]→
C[a, b], C-przestrzeń funkcji ciągłych.
Funkcjonał Tikhonowa:
Mα[z] =∫ c
a
[∫ b
a
Kh(x, s)z(s)ds−Uδ(x)]2dx+α
∫ b
a
[z2(s)+z′(s)2]ds (11.23)
α- podobnie jako w (11.8) - parametr regularyzacji.
SKUTECZNE ZASTOSOWANIE NUMERYCZNE Rozważmy Równanie Eu-lera dla (11.23)
Bαz = Bz + αCz = fδB = BT -nieujemne
Funkcjonał T.7→ Dyskretyzacja (∫→∑
) 7→ Równanie Eulera 7→ Algorytmobl. z = B−1
α f
Zaletą funkcjonału są efektywne algorytmy.
Dla zbyt małych α mamy niestabilny problem!
Wzór na ocenę odchylenia:dla Ax = y ⇒ ‖δy‖
‖y‖ < cond(A)( δ‖f‖ + h
‖A‖ )

76 11 Algorytm aproksymacji całkowej, metoda regularyzacji Tikhonowa
‖f ′ − f‖ ¬ δ (11.24)
‖A′ −A‖ ¬ µ (11.25)
cond(A) = ‖A‖‖A−1‖ (11.26)
Istnieje również odwrotne twierdzenie Tikhonowa:α⇒ δ, h( α określa δ i h potrzebne do stabilnego rozwiązania.)
11.2 Przykłady. Równanie dyfuzji.
11.2.1 Zagadnienie dla równania dyfuzji ź odwrotnym czasem”.
Rozwazmyut = uxx, x ∈ [0, l], t ∈ [0, T ]; (11.27)
równanie może posłużyć dla opisu zmian temperatury (dla dyfuzji - koncen-tracji) w prętie.
Zagadnienie klasyczne (Cauchy)
u(x, 0) = f(x), u(0, t) = u(l, t) = 0. (11.28)
jest stabilne (patrz dowód w scryptie ŻRiC”).Sformulujmy jeszcze jedno zagadnienie z oczywistym sensem fizycznym.
Chcemy oszacować rozkład gęstości masy w rurze w czasach t ∈ [0, T ] na pod-stawie pomiaru w chwili T . Mamy zagadnienie: równanie (11.27) plus warunkibrzegowe
u(x, T ) = f(x), u(0, t) = u(l, t) = 0. (11.29)
Rownoważnie do (11.28) po zamianie t→ T − t
ut = −uxx, x ∈ [0, l], t ∈ [0, T ]; u(x, 0) = f(x) (11.30)
- historia procesa.
11.2.2 Zagadnienie dla równania dyfuzji: funkcja żródła.
Pomiary w jednym punkcie. Rozwiazanie metodą Fouriera.Poprawność dzia lania obydwu Metod Regularyzacji sprawdzamy po-
przez porównanie wyników otrzymanych z rozwiaιzania zagadnienia odwrot-nego z danaι wcześniej funkcjaι.
Aby móc sformu lować, a nasteιpnie rozwiaιzać zagadnienie odwrotne,potrzebujemy model zjawiska oraz określonaι liczbeι pomiarów.

11.2 Przykłady. Równanie dyfuzji. 77
1. Model jest nam dany w postaci równania różniczkowego dyfuzji cieplnej:
du(t, x)dt
= a2 d2u(t, x)dx2 + f(x). (11.31)
a - sta la dyfuzjif(x) - funkcja źród la
Do pe lnego opisu zjawiska potrzebne nam saι warunki brzegowe:
u(t, 0) = u(t, l) = 0,u(0, x) = 0.
(11.32)
gdzie l jest d lugościaι preιta.
2. Pomiarami saι sprawdzenia temperatury preιta w określonym punkcie x0,co pewien sta ly odcinek czasu.
3. W przypadku testu i ustalenia parametru regularyzacji α jako w (??);temperatureι w czasie T otrzymujemy poprzez rozwiaιzanie zagadanieniaprostego dla danego modelu funkcji źród la w punkcie x0. Do otrzymanegow ten sposób pomiaru wprowadzamy szum, który w warunkach laborato-ryjnych by lby wynikiem niedoskona lości aparatury pomiarowej.
Testową funkcję do której przyrównujemy wyniki rozwiaιzania zagad-nienia odwrotnego dana jest wzorem:
f(x) =
1 dla 13 ¬ x ¬
23
0 dla 0 ¬ x ¬ 13 , 2
3 ¬ x ¬ 1(11.33)
11.2.3 Wygenerowanie testowych wartosci temperatury.
Wartsoci u trzymujemy rozwiaιzujaιc równanie (11.31) przy warunkach (11.32).
Poszukujemy rozwiaιzania w postaci szeregu Fouriera:
u(x, t) =∞∑n=1
Tn(t)sin(nπx
l) (11.34)
Zak ladamy również, że f(x) może być przedstawione w postaći:
f(x) =∞∑n=1
Ansin(nπx
l) (11.35)
An =2l
∫ l
0f(x)sin(
nπx
l)dx gdzie n = 1, 2, 3.. (11.36)
Podstawiajaιc (11.36) i (11.35) do równania (11.31) otrzymuemy:

78 11 Algorytm aproksymacji całkowej, metoda regularyzacji Tikhonowa
∞∑n=1
dTn(t)dt
sin(nπx
l) =
∞∑n=1
a2(nπ
l)2Tn(t)sin(
nπx
l) +
∞∑n=1
Ansin(nπx
l)
(11.37)Odpowiednio dzielaιc otrzymujemy:
dTn(t)dt
− a2(nπ
l)2Tn(t) = An. (11.38)
Po rozwiązaniu tego równania różniczkowego przy warunkach (11.32) dosta-jemy:
Tn(t) =∫ t
0Anexp[−(
anπ
l)2(t− τ)]dτ gdzie n = 1, 2, 3.. (11.39)
Podstawiajaιc (11.38) i (11.36) do (11.34) uzyskujemy wzór :
u(t, x) =2l
∞∑n=1
sin(nπx
l)(
l
anπ)2(1− exp[−(
anπ
l)2t])
∫ l
0f(x′)sin(
nπx′
l)dx′
(11.40)Dla uproszczenia obliczeń przyjmujemy za lożenia:
a = 1,l = 1,n = 20.
(11.41)
Możemy dać ma le n, gdyż dla wyższych, ich istotność dla wyniku jest znikoma.
Majaιc gotowy wzór oraz danaι funkcje f(x), obliczamy temperature wpunkcie x = x0 = 1
2 , dla 12 czasów t odpowiednio 0.1, 0.2, ..., 1.2. Dodat-kowo wyliczone temperatury poddajemy żealnemuźaszumieniu.
Temperatury, które zosta ly wyliczone:
0.045510.060680.066200.068130.068930.069150.069340.069230.069310.069620.069540.06930
(11.42)

11.2 Przykłady. Równanie dyfuzji. 79
11.2.4 Sformu lowanie zagadnienia odwrotnego.
Rozwiaιzanie (10) można przedstawiś w postaci równania Fredholma I rzeιdu:
K(t, s) =2l
∞∑n=1
sin(nπx0
l)sin(
nπx
l)(
l
anπ)2(1− exp[−(
anπ
l)2t]) (11.43)
f(s) = f(x)
u(t, x0) = g(t)
gdzie x0 jest pomiarem
Laιczaιc otrzymujemy:
g(t) =∫ l
0K(t, s)f(s)ds (11.44)
Równanie (14) macierzowo zapisujemy:
g = Mf (11.45)
Zagadnienie odwrotne, polega na wyliczeniu funkcji źród la f przez odwróceniemacierzy M przy danych g.
f = M−1g (11.46)
Macierz pomiarów temperatury g jest wygenerowywana (12).Element macierzowy macierzy M wynosi:
Rysunek 11.1. Funkcja żródła jako simulacja wyników pomiarów
mij =10∑n=1
2sin(nπx0
l)sin(
nπxil
)(l
anπ)2(1− exp[−(
anπ
l)2tj ]) (11.47)

80 11 Algorytm aproksymacji całkowej, metoda regularyzacji Tikhonowa
A pe lne równanie macierzowe (15) wyglaιda nastepujaιco :
g0
g1
g2
g3
g4
g5
g6
g7
g8
g9
g10
g11
=
m0,0, . . .,m12,0
. .
. .
. .
. .
. .
. .
. .
. .
. .
. .m0,11, . . .,m11,11
f0
f1
f2
f3
f4
f5
f6
f7
f8
f9
f10
f11
(11.48)
Aby wyznaczyć kołumnę g, zgodnie z (11.48) należy odwrocić macierz M .Metoda „naiwna’, odwrócenie macierrzy (kwadratowej) Metodaι nie da sieι
Rysunek 11.2. Metoda naiwna, albo f = M−1g.
rozwiaιzac tego zagadnienia odwrotnego.
11.2.5 Rozwiązanie zagadnienia odwrotnego.
Rozwiaιzanie za pomocaι Metody Gaussa-Tikhonova
W przypadku tej metody funkcjonał Tikhonowa w przestreni Sobolewa jest
Mα(f) =∫ d
c
∫ b
a
[K(x, s)f(s)ds−u(x)]2dx+α∫ b
a
(p(s)(f ′(s))2 +q(s)f2(s))ds,
(11.49)
Zdyskretyzowane równanie (11.49) wyglaιda nasteιpujaιco:

11.2 Przykłady. Równanie dyfuzji. 81
Mα =N∑i=1
hi[J∑j=1
hjKijfj − ui]2 + α[J∑j=1
hjf2j +
J∑j=1
(fj+1 − fj
h)2hj ], (11.50)
Zdyskretyzowany funkcjona l minimalizujemy poprzez zrózniczkowanie wzgleιdemfj i przyrównanie wyniku do 0. Otrzymujemy :
N∑i=1
J∑j=1
hihjKijKikfj−N∑i=1
hiKikui+α(fk+1 − 2fk + fk−1
h2 −fk) = 0, (11.51)
Po przejściu z reprezentacji dyskretyzacji do macierzowej i za lożeniu żep(s) = 1 oraz q(s) = 1 , funkcjona l wyglaιda nasteιpujaιco:
KTKhihjf −KThi + αCf = 0, (11.52)
Rysunek 11.3. Metoda Gaussa, albo α = 0.
Metodaι Gaussa nie da sieι rozwiaιzac tego zagadnienia odwrotnego.Metodaι regularyzacji Tikhonova w przypadku nieciągłej funkcji żródła.
Rysunek 11.4. Metoda Tikhonova, albo α = 0.0000177064.
Metodaι regularyzacji Tikhonova w przypadku ciągłej funkcji żródła. Wobu przypadkach α dobiera się za pomocą minimalizacji funkcjonała Gaussa.

Rysunek 11.5. Metoda Tikhonova, gładka funkcja żródła α = 0.00001978940.
Rysunek 11.6. Rezultaty methody Tikhonova dla pomiarów pierwszego typu, α =1.36139 ∗ 10−11 with n = 20(left) i α = 2.41532 ∗ 10−13 z n = 80(right) funkcjażródła pokazana dla porównania
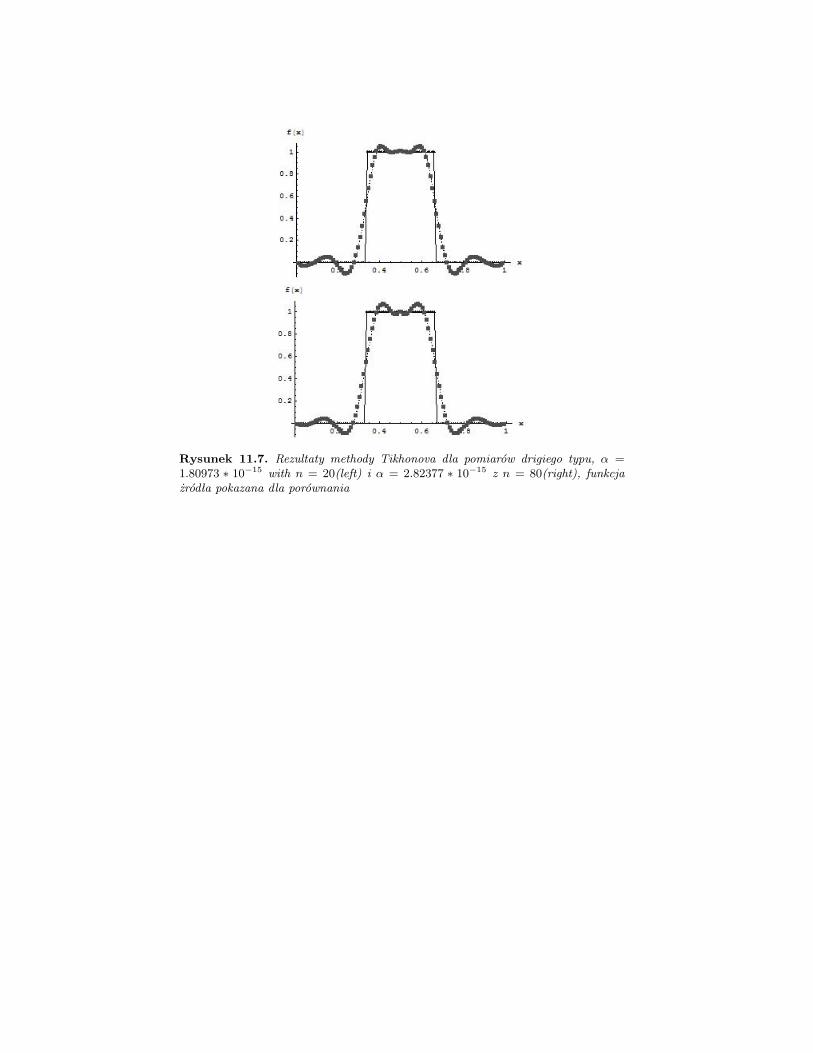
Rysunek 11.7. Rezultaty methody Tikhonova dla pomiarów drigiego typu, α =1.80973 ∗ 10−15 with n = 20(left) i α = 2.82377 ∗ 10−15 z n = 80(right), funkcjażródła pokazana dla porównania

Rysunek 11.8. Rezultaty methody Tikhonova dla pomiarów trszeczego typu, α =8.1753 ∗ 10−7 with n = 20(left) i α = 3.4785−15 z n = 80(right) funkcja żródłapokazana dla porównania
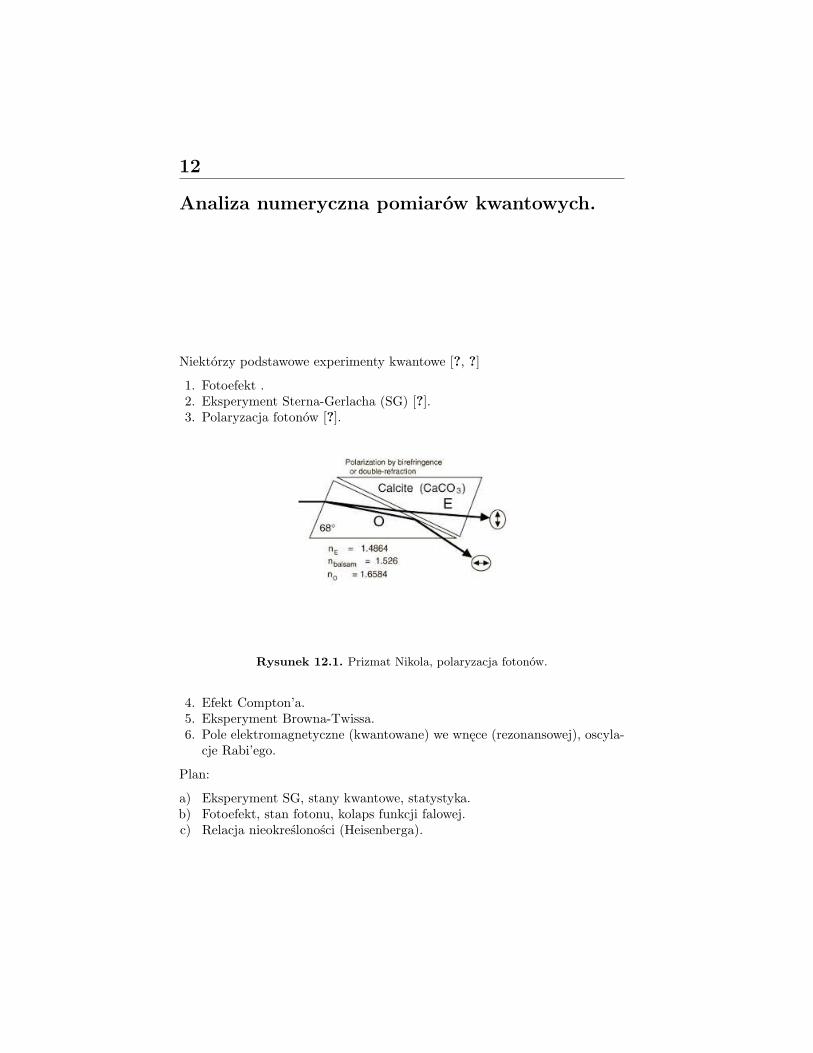
12
Analiza numeryczna pomiarów kwantowych.
Niektórzy podstawowe experimenty kwantowe [?, ?]
1. Fotoefekt .2. Eksperyment Sterna-Gerlacha (SG) [?].3. Polaryzacja fotonów [?].
Rysunek 12.1. Prizmat Nikola, polaryzacja fotonów.
4. Efekt Compton’a.5. Eksperyment Browna-Twissa.6. Pole elektromagnetyczne (kwantowane) we wnęce (rezonansowej), oscyla-
cje Rabi’ego.
Plan:
a) Eksperyment SG, stany kwantowe, statystyka.b) Fotoefekt, stan fotonu, kolaps funkcji falowej.c) Relacja nieokreśloności (Heisenberga).

86 12 Analiza numeryczna pomiarów kwantowych.
d) Pole elektromagnetyczne, kwantowanie wtórne.e) Odtwarzanie potencjałów prez dane rozpraszania elektronu.f) Oscylacje Rabi’ego liczby fotonów we wnęce.
Podstawowe pojęcza mechaniki kwantowej jako wyniki obróbki danychpomiarowych
I. Stan kwantowy przez pomiary prawdopodobierństw: relacje między po-miarami klasycznymi. Wiedza o wektorach z przestrzeni Hilberta.
II. Obserwabla;operatory reprezentujące obserwację - obróbka danych - widmo opera-torów. Zbior operatorów przemiennych jako możliwość obserwacji, defi-nującej stan.
III. Rozpraszanie cząstek → główne żródło uzyskania informacji → zagad-nienie odwrotnego miechaniki kwantowej (np. - w najprostym przy-padku - potencjałow).
IV. Problemy mechaniki kwantowej w teorii relatywistycznej.Uwagi. Mechanika kwantowa nie jest „wykończona” (brak kompletnegoopisu relatywistycznego). Problem operatoru czasu. Każde z równańpodstawowych - np. - równanie Dirac’a opisuje jedną cząstkę (izolo-waną), wzrost energii - generacja nowych cząstek, par- niezbiędna kwan-tyzacja wtórna (druga)
W mechanice klasycznej stan cząstki punktowej określają położenie i pędf, p:
f = x, y, z ,
p = px, py, pz
; zakładamy, że istneję w dowolnym czasie - możliwa ciagłośc obserwacji.W mechanice kwantowej do badania stanu cząstki potrzebujemy innego niżw kłasycznej, schematu pomiarowego. Pomiar dzieli się na dwa etapy, więc,
Rysunek 12.2. Schemat pomiarowy.
powstaje α, β - podwójny zbiór parametrów, jako wyników pomiarów klasycz-nych na tych etapach,α = α1...αs,

12 Analiza numeryczna pomiarów kwantowych. 87
β = β1...βs,gdzie: s - liczba klasycznych stopni swobody (+rzut spinu) .Jeżeli w trakcie tworzenia stanu na obszarze α otrzymujemy jako wynikiα1, α2, ... , to wielkości β1, β2, ... występują z niepewnosciu. Ale s ”twar-dej’ gęstością prawdopodobieństwa Pα (β).
Przykładowo Rozważamy układ o 1 stopniu swobody (s = 1):
α = p,
β = x,
gdzie:p – pęd, x – położenie.Przypadek jednowymiarowy – (sztuczna, jako model) cząstka punktowa:
ψp (x) = ceipx, | ψp(x) |2=| c |2 .
a) nawet mając pełną informację o stanie cząstki nie będziemy mieli pewnościco do jej położenia;
b) oszacowanie empiryczne Pα (β) wymaga powtórzenia procesu pomiaruwielokrotnie.
UWAGA: Aby otrzymać bezbłędny (w sensie teorii prawdopodobieństwa)pomiar Pα (β) należałoby powtórzyć go nieskończoną ilość razy. W praktyceiłość pomiarów N jest zawsze skończone, ale może być dużą.Nie istnieje źródło α, w którym pęd i położenie występują jednocześnie zprawdpodobieństwem 1 (fakt empiryczny, odtwarza sie w teorii, jako brak ko-mutacji odpowiednich operatorów).

88 12 Analiza numeryczna pomiarów kwantowych.
12.1 Eksperyment Sterna-Gerlacha.
Opis experimentów [?], teorii [?].Mechanika klasyczna:
Rysunek 12.3. Eksperyment Sterna-Gerlacha. Rzut na oś z sily jest dowolny, leżyw granicach [Fmax,−Fmax].
Energia oddziaływań atomów z polem magnetycznym:
U = µ ·B ≡ (µ,B)– iloczyn skalarny,
Fz = −∂U∂z
,
moment magnetyczny atomów srebra Ag:µ = µ0s.
Rzut siły na oś źź jaką atom jest odchylany:
FL = −∂U∂z
= −µ · −∂B∂z
= −µz∂Bz∂z
= −µ0sz∂Bz∂z
,
jeśli pole B skierowano wzdłóż z.Mechanika kwantowa:Operator spinu: sz ma dwie wartości własne ∼ ±
2 . Na przykład spinatomu srebra ∼ spin elektronów. Spin elektronów może być skierowany wgórę albo w dół.
Teza: widmo reprezentuje operator Sz =(
+2 0
0 −2
)– postać zdiagonalizo-
wana operatora (wynik badania).Widmo rzutu spinu jest dyskretne (skonczone).
µz ∼ µ0 ∗ sz,
gdzie:s - własny moment magnetyczny.Jeżeli operator ma dwie wartości własne jest macierzą 2x2.Możemy zdobyć informacje o operatorach.

12.1 Eksperyment Sterna-Gerlacha. 89
Pomiar kwantowy chciałbym opisać na przykładzie (myślowego i zmody-fikowanego) doświadczenia Sterna-Gerlacha. Układ użyty w doświadczeniuprzedstawiłem na rysunku 1 (dołączonym w załączniku). Urządzeniem alfajest piec ze srebrem wraz z układem kolimujących szczelin oraz układ magne-sów i zaślepka. Urządzenie alfa wytwarza atomy srebra w stanie alfa, (stanalfa określa w naszym przypadku kierunek rzutu spinu atomów srebra wy-chodzących z urządzenia alfa, dla uproszczenia nazwijmy ten stan stanem”+”). W urządzeniu tym wytwarzane są jednak dwie wiązki atomów srebrao dwóch różnych stanach. Aby otrzymać tylko jedną wiązkę (w stanie ”+”)umieszczono zaślepkę w miejscu, przez które przelatuje druga wiązka (będącaw innym stanie określającym rzut spinu, dla uproszczenia nazwijmy ten stan-”), dzięki czemu z układu alfa wylatuje tylko jedna wiązka atomów srebra.Nazwijmy tą wiązkę, że jest w stanie A+ (wiązka o stanie ”+”w urządze-niu alfa). Za urządzeniem alfa ustawiono urządzenie beta (układ magnesóworaz ekran) tak, aby wiązka w stanie A+ przelatywała pomiędzy magnesamiurządzenia beta. Po wyjściu z układu magnesów (gdy kąt pomiędzy płaszczy-znami urządzenia alfa i beta jest różny od 0, Pi) urządzenia beta otrzymamyznowu dwie wiązki atomów srebra. Nazwijmy je, że ta wiązka odchylająca siędo góry (względem układu magnesów urządzenia beta) będzie w stanie B+ awiązka odchylająca się do dołu będzie w stanie B-. Na rysunku 1 narysowanoschemat, w którym kąt pomiędzy płaszczyznami urządzeń alfa i beta wynosi0. W tym przypadku okazuje się, że wszystkie atomy srebra będące w stanieA+ przejdą do stanu B+, co oznacza, że stan A+ jest stanem czystym, czyliwszystkie atomy srebra wychodzące z urządzenia alfa mają rzut spinu w tymsamym kierunku. To co mierzy się w tym doświadczeniu to ilość atomów sre-bra będących w stanie B+ i B- w zależności od kąta pomiędzy płaszczyznamiurządzeń alfa i beta (np. wstawiając w odpowiednie miejsca na ekranie de-tektory). Ważnym jest fakt, że podczas pomiarów urządzenie alfa wytwarzawiązkę atomów będących (w każdej chwili czasu) w czystym stanie A+. Napodstawie pomiarów możemy oszacować (w przybliżeniu, im więcej pomia-rów tym dokładniejszy wynik) prawdopodobieństwo przejścia atomu srebraze stanu A+ do jakiegokolwiek stanu beta (nazwijmy ten dowolny stan ”B”).A więc w doświadczeniu wyznacza się prawdopodobieństwo przejścia atomusrebra ze stanu A+ do stanu B, co oznaczamy PA+(B)

90 12 Analiza numeryczna pomiarów kwantowych.
Każdy pomiar kwantowy jest kombinacją dwóch pomiarów:- pomiar ρ – macierz gęstości,- prawdziwy pomiar kwantowy:
| − 12〉 = a| − 1
2〉y + b|+ 1
2〉y,
Sy| −12〉y = −h
2| − 1
2〉y,
a2 + b2 = 1.
Mechanika kwantowa
Rysunek 12.4. Eksperyment Sterna-Gerlacha - B‖z.
Zakładając, że liczba kwantowa spinu atomu S=1 , α = Sz mówimy, żestan jest czysty jeżeli powtarzanie pełnego doświadczenia daje ten sam wynik(P 1
2( 1
2 ) = 1). Dla Sz = 1, stan jest czysty jeżeli powtórzenie pełnego doświad-czenia dla α1,...,αs daje prawdopodobieństwo 1 dla każdego αi. Pα (α) = 1.
Rysunek 12.5. Eksperyment Sterna-Gerlacha - B⊥z (wynik na ekranie to super-pozycja stanów w lewo i prawo).

12.3 Relacja Heisenberga. Wyprowadzenie. 91
12.2 Heisenberg quantum mechanics
Macierze.
Rysunek 12.6. Wzory z pract Heisenberga, r. 1925
Rysunek 12.7. Tekst z pracy Heisenberga
12.3 Relacja Heisenberga. Wyprowadzenie.
A,B - operatory,
[A,B] = iC, A† = A, B† = B, C† = C,
np. [Sz, Sy] = iSx.4A = A− 〈A〉, odchylenie 〈(4A)2〉 = (4A)2
.
4A− iλ4B = D, (12.1)
〈D†D〉 = (ψ,D†Dψ) = (Dψ,Dψ) 0, (12.2)
D†D = (4A)2
+ λ2(4B)2
+ iλ[A, B], (12.3)
〈D†D 0 , 〈(AA)2〉+ λ2〈(4B)
2〉 − λ〈C〉 0, (12.4)
〈C〉2 − 4〈4A〉〈(4B)2〉 ¬ 0, (12.5)
〈(4A)2〉〈(4B)2〉 〈C〉2
4. (12.6)
A = p, B = x, 4p4x 2,
A = Sz, B = Sy, 4Sz4Sy 〈Sx〉
2.
Stan cząstki określają:
P (12
), P (−12
).
Stan koherentny (stan o minimalnych rozrzutach):
〈A〉 =∑n
λnp(n)⇒ 〈D†D〉 = 0.

92 12 Analiza numeryczna pomiarów kwantowych.
Macierz gęstości: 1z e− HkT = ρ(H) jest przykładem realizacji pojęcia stanu tak
samo jak funkcja ψ. W mechanice kwantowej (QM): PA(B) = |ψA(B)|2.Np., ψE(x) – funkcja nierelatywistyczna -brak symetrii x-t.
m(X) ∼ „nie ostry” wynik pomiaru ∼ T – stan przygotowanie, Ei – stanpomiarowy
PA(B) = tr[T Ei].
Stan czysty na wejściu po filtracji spinu w polu magnetycznym
A = Sz, B = Sy;
a) pomiary widma:
Sz =2
(1 00 −1
)∼ A;
b) pomiary widma: Sy- w.w ∼ B,brakuje informacji o drugim operatorze;
c) „a priori” wiemy, że Sz, Sy i ewentualnie Sx są operatorami (relacja He-isenberga: komutator + 1 operator = 2-gi operator)
, ,+′′[A, B] = iC, 4A4B 〈C〉2,
4A =[ ∫
ψ∗(A− 〈A〉)2ψdr] 12, (12.7)
∃ψc, (12.8)
4Ac4Bc =〈C〉2. (12.9)
Pomiar kwantowy polega na N-krotnym powtarzaniu doświadczenia α − β iwyznaczaniu:
〈A〉 =∑iAipiN
,
gdzie: Ai - widmo, pi- prawdopodobieństwo empiryczne, albo: 〈A〉 ∼∫AλdPλ – widmo ciągle.
Problemem mechaniki kwantowej (QM) jest odtworzenie formy operato-rów, a tazkże wyznaczenie macierzy gęstosci. Po uwzględnieniu relacji Heisen-berga, kiedy stan ≈ stan koherentny, także otrzymujemy typowe zagadnienieodwrotne (źle uwarunkowane dlatego, że Ai albo Aλ są pod znakiem sumy(całki)).
Zagadnienie:
Zakładamy, że widma operatora spinu (Si) są takie same (2 ,−
2 ). Proble-
mem do rozwiązanie jest sposób dokonania pomiarów średnich i wyznaczeniaelementów macierzowych:

12.3 Relacja Heisenberga. Wyprowadzenie. 93
Sy =(a bc d
), S† = S ⇐ a = a, d = d, c = b. (12.10)
Cztery parametry rzeczywiste:
〈S2y〉 = (φψ)
(a bb d
)2(φψ
), . . . (12.11)
〈Sy〉 = 0 - widmo symetryczne.
UWAGA
Pod informacją - przy wykorzystaniu symetrii (w tym symetriI czaso-przestrzeni),rzuty składowej momentu pędu są generatorami transformacji obrotów.
Czym się różnią operatory spinu i momentu orbitalnego?
S,L,
S - obrót o π,L - obrót o 2π.
12.3.1 Przyk lad zagadnienia odwrotnego
Jednowymiarowe równanie Schrodingera ma postać
−Ψ ′′ + U(x)Ψ = EΨ. (12.12)
Jest to równanie różniczkowe drugiego rzeιdu. Zagadnienie spektralne z tymrównaniem należy do klasy zagadnień Sturma-Liouville’a. Dla prostoty zapisuzastosowano przeskalowane jednostki atomowe. Funkcja U(x) wyraża poten-cja l, E jest parametrem spektralnym i opisuje energieι. W mechanice kwanto-wej funkcja falowa Ψ(x) opisuje stany kwantowe, określa prowadobodobień-stwo. Funkcja Ψ(x) określa stan kwantowy, jeśli∫ ∞
−∞|Ψ(x)|2 dx <∞. (12.13)
Zagadnienie proste polega na tym, że majaιc dane U(x), należy uzyskaćrozwiaιzania
Ψ(x) ∈ H, (12.14)
czyli należaιce do przestrzeni Hilberta, oraz takie rozwiaιzania ΨE(x), że∫ E+∆E
E
ΨE(x)dE = ΨE,∆E(x) ∈ H, (12.15)
a zatem

94 12 Analiza numeryczna pomiarów kwantowych.∫ ∞−∞|ΨE,∆E(x)|2 dx <∞. (12.16)
Wzór (??) jest zwiaιzany z tzw. widmem dyskretnym, Ψ ∼ e−κnx, En =−κ2
n. Widmo dyskretne opisuje stany zwiaιzane. Wzór (??) określa widmociaιg le, Np. w przypadku U(x) ≡ 0, ΨE ∼ eikx, E = k2; widmo ciaιg le mazakres E ∈ [0,∞).
Fizycznie w zagadnieniu mogaι wysteιpować i stany zwiaιzane (widmo dys-kretne)i stany rozprasania albo ionizacji (widmo ciaιg le). Przyk lad - atom wo-doru. Gdy w atom uderza jakaś czaιstka, może nastaιpić wzbudzenie elektronu(na wyższy stan zwiaιzany) lub też elektron może zostać wybity z atomu (io-nizacja - widmo ciaιg le).
Z zagadnieniem odwrotnym mamy do czynienia wtedy, gdy na podstawiepewnych danych pomiarowych chcemy znaleźć pewne wielkości - obserwabli(np. potencja l, opisujaιcy oddzia lywanie w procesach rozproszeniowych). Za-gadnienie odwrotne może być źle uwarunkowane (ill-posed problem) wg Ha-damarda. W takich zagadnieniach istotne saι informacje a priori, czyli pewnedane teoretyczne, które “z góry” znamy, np. badamy rozpraszanie fali w ja-kimś ośrodku, ale wiemy coś o rozk ladzie geιstości w tym ośrodku.
Niech zagadnienie dla równania (??) zawiera:
1. Widmo dyskretne κnan = lim
x→∞ψneκnx. (12.17)
2. Widmo ciaιg le. Mamy fa leι padajaιcaι, opisywanaι cz lonem eikx (zak ladamy,że fala nadlatuje z kierunku x < 0 i podaιża w kierunku x dodatnich).Możemy obserwować efekty rozpraszania
ψ = eikx + v(k)e−ikx, x→ −∞. (12.18)
Powyższy wzór mówi, że po stronie x < 0, x → −∞ mamy zarówno faleιpadajaιcaι jak i odbitaι (opisywanaι cz lonem z wyk ladnikiem −ikx. Funkcjav(k) opisuje wspó lczynnik odbicia. Natomiast po stronie x > 0, x → ∞mamy tylko faleι przechodzaιcaι
ψ = w(k)eikx, x→∞. (12.19)
Funkcja w(k) opisuje wspó lczynnik przejścia. Wspó lczynniki normuje sieι tak,aby
|v|2 + |w|2 = 1, (12.20)
co oznacza że możemy uzyskać w po v. Celem jest znalezienie potencja lu U(x).Wprowadzamy funkcjeι
F (x) =∑m
am exp(−κmx) +1
2π
∫ ∞−∞
v(k) exp(ikx) dk. (12.21)

12.4 Pola elektromagnetyczne w teorii mechaniki kwantowej 95
Znajdujemy postać F (x+ y), przechodzimy z F (x+ y) do F (x, y) i tworzymyrównanie ca lkowe
K(x, y) + F (x, y) +∫ ∞x
K(x, s)F (s, y) ds = 0. (12.22)
Można powiedzieć, że zagadnienie odwrotne formuluję się następujące:Dane rozpraszania κn, an, v(k) pozwalają odtworzyć funkcjeι F jako ją-
dro odpowiedniego równania ca lkowego (??). Równanie (??) jest równaniemVolterry z parametrem y, w równaniu tym należy znaleźć funkcjeι K(x, s).Potencja l U(x) znajduje sieι ze wzoru
U(x) = 2dK(x, x)
dx. (12.23)
Gelfand i Levitan (1951) oraz Marchenko (1954) wykazali, że rozwiaιzanie rów-nania (??) istnieje. Od ich nazwisk równanie nazywa sieι równaniem Gelfanda-Levitana-Marchenko (GLM), powsta la teoria GLM.
12.4 Pola elektromagnetyczne w teorii mechanikikwantowej
Równanie ruchu w mechanice kwantowej:
m¨r = F, m¨r = −∇U q, p ∼ x, px.
Przejście do postaci Poissona (nawiasy Poissona ):
q = H, q, (12.1)
p = H, p, (12.2)
H =p2
2m+ U. (12.3)
Ewolucję w czasie traktowana jest tutaj jako algebra Liego, tworzona przeznawias Poissona.
Przy kwantyzacji otrzymujemy:
→ 1i
[] −− q → q, p→ p,
np:q, p = 1 ⇒ [q, p] = i
Przepis na kwantyzację:

96 12 Analiza numeryczna pomiarów kwantowych.
A(p, q)→ A(p, q),
H → H =p2
2m+ U ,
H =p2
2m+ U. (12.4)
Uwaga 1
qp→ qp, pq
Uwaga 2
Dla spinów nie mamy odpowiedników klasycznych. To, co mamy - tylko zpomiarów i analogii - pozwala nam stworzyć teorię.
Rozważmy oscylator harmoniczny:
ω = 1 , = 1, (12.5)
q + ip = a, (12.6)
a† = a− ip, (12.7)
H = a†a+12. (12.8)
Korzystamy z analogii pomiędzy mechaniką i polem elektromagnetycznym.Hamiltonian w przypadku pola elektromagnetycznego jest skomplikowany
H =∫V
B2 + E2
8πdV, (12.9)
- energia pola w szescianie o objętości V. Kwantyzację utrudnia fakt, żedivB = 0 w próżni.
Ależ, rozważmy jeden wymiar:
E =∑v
aei(kx−ωt) + c.c, (12.10)
B =∑v
bei(kx−ωt) + c.c, (12.11)
(12.12)
po podstaweniu w (??)
H =∑v
ω(a†vav +12
) (12.13)
– nieskończona ilość stopni swobody.Pole elektromagnetyczne pośredniczy między obserwatorem a źródlem in-
formacji. Kwantyzacja pola elektromagnetycznego - kwantyzacja fotonów zewzględu na energię.
12.4 Pola elektromagnetyczne w teorii mechaniki kwantowej 97
Ale: gdzie wylecial foton ? :)
ˆE =∑k
a†kei(kx−ωt) + ake
−i(kx); (12.14)
z =(ωq + ip)√
2ω– oscylator harmoniczny,
|z| =√E
ω.
Przy kwantyzacji pola:
a = eiφ|a|, |a| = sqrtN.
Liczba fotonów w modzie k:N = a†kak.
Możemy policzyć energię średnią w jakimś stanie:
Eklasyczne −→ ˆEkwantowe,
ak −→ ak.
Zjawiska falowe:
|z| =√E
ω.
Energia jest proporcjonalna do liczby fotonów:
Wk ∼ Nk,
w ∼ E2 +B2
8π; (12.15)
|a| ∼ a†a.Czy φ −→ φ? - co się dzieje z operatorem fazy pola elektromagnetycznego?
a = V |a| = eiφ|a| → V |n〉 = |n− 1〉, V |0〉 = 0,
V †|n〉 = |n+ 1〉.V nie jest unitarny, φ nie jest samosprzężoney.
V =∞∑n=i
|n− 1〉〈n| – udalo się stworzyć operator fazy (12.16)
Relacja Heisenberga:[N , φ] 6= 0.
Ograniczenie pomiarowe:
4N4φ 2.
Teoria pola jest ukladem o nieskończonej liczbie stopni swobody - skoń-czona liczba pomiarów.

98 12 Analiza numeryczna pomiarów kwantowych.
12.5 Polożenie fotonu - operator
Informacja - wynik oddziaływania pola elektromagnetycznego i ciała.
W mechanice kwantowej nie relatywistycznej dla elektronu mamy funkcjęfalową:
e− ∼ |ψ(x)|2,xφ(x) = xφ(x),
x = i∂
∂p. (12.17)
Funkcja wlasna:eipx
.
12.5.1 Reprezentacja pędowa
Paradoks EPR – problem reprezentacji (wiemy, co się dzieje, ale nie wiemy,gdzie znajdują się cząstki i jak je można „rozdzielić”).
Z tym problemem związany jest problem operatora położenia fotonu (x).Dla fotonów
p ∼ k.
Foton jest cząstką relatywistyczną, porusza się z prędkością światła (v = c) inie można zastosować przybliżenia nierelatywistycznego.Okazalo się, że ∂
∂pφs 6∈ podprzestrzeni stożka świetlnego.Problem nie zostal rozwiązany do dziś.
12.6 Podsumowanie
1. Każdy pomiar kwantowy - rozproszenie cząstki (e−, γ, . . .) na obiekcie ba-danym (cząstka elementarna, atom, cząsteczka, klaster). Początek (przy-gotowanie) i koniec (sprawdzanie) są pomiarami klasycznymi.
2. Typowe zagadnienie odwrotne oparte jest na równaniu całkowym typuGelfarda-Levitana-Marchenko (GLM). Równanie GLM – jest równaniemVolterry II rzędu.Dane są: współczynnik odbicia i rozproszenia.Wspólczynnik odbicia + widmo dyskretne, chcemy (i, gzy dane są pełny- możemy !) policzyć potencjał:
U(x) =d
dxK(x, x).
3. Dodatkowe - problemy obróbki informacji jako zagadnień klasycznych(dane wejszczowe pomiarów mechaniki kwantowej).

12.6 Podsumowanie 99
4. Analitycznie można rozwiązać, kiedy jądro jest zdegenerowane, faktory-zuje się (rozpada),
K(x, y) =N∑i
ai(x)bi(y),
inaczej możliwe jest tylko prybliżone - numeryczne rozwiązanie.5. Modelowanie układów rozpraszających elektronu, protonu, fotonu, neu-
tronu. Wprowadzene zostają charakterystyki U → U (operatorów) i od-wrotnie.
6. Jednocześnie możemy tylko zmierzyć (przygotować stan) te wielkości,które komutują. Dlatego liczby fotonów, fazy, połżenia nie można dokład-nie zmierzyć (makroskopowo) jednoczesnie. Nioe istnieje takiej aparaturyprzygotowawczej.


13
Pomiary i komputery kwantowe.
13.1 Sformulowanie modeli obwodów w terminachalgebry liniowej.
W tej części opracowania modelu obwodu obliczeń w kategoriach wektorów imacierze. To nie jest wspólne podejście do klasycznego komputera, ale to robiprzejście do standardowego sformułowania obliczeń kwantowych. Pomoże rów-nież odróżnić nowe oznaczenia stosowane w kwantowej informatyce od nowychkoncepcji. Idee i terminologia prezentowane tutaj będą uogólnione i nawra-cające w tym rozdziale. Załóżmy, że dany opis układu (np. na wykresie, jakna rysunku 1.1), i określenie pewnych wartości bitów wejściowych. Jeśli za-dano przewidzieć Wyjście układu, podejście będzie prawdopodobnie podjąćbyłoby prześledzić przez obwód od lewej do prawej, aktualizacji wartości bitówzapisanych każdy z przewodów po każdej bramy. Innymi słowy, jesteś po ”pań-stwoź bity na drutach, jak przejść przez obwód. Dla danego punktu Układ,będzie często odnosi się do stanu z bitów na drutach w tym punkcie w obwo-dzie po prostu jako śtan komputera”w tym punkcie. Stan związany z danympunkcie deterministyczny (nie probabilistyczny) Układ może być określonaprzez podanie wartości bitów na każdy z przewodów w obwodzie.”Państwoźkonkretnego przewodu na danym punkcie obwodu, Oczywiście, jest po prostuwartość bitu na tym przewodzie (0 lub 1). Dla probabilistyczny obwód, jednakten prosty opis nie wystarczy.
Rozważmy jeden bit, który jest w stanie 0 z prawdopodobieństwem p0 wstanie 1 prawdopodobieństwem p1. Możemy podsumować te informacje przez2-wymiarowego wektora prawdopodobieństwa.(
0
p1
)(13.1)
Należy zauważyć, że opis ten można również stosować do deterministycznychukładów. Drutu w deterministycznym układzie, którego stan jest 0 może byćokreślony przez prawdopodobieństw p0 = 1 i p1 = 0, a odpowiadający wektor

102 13 Pomiary i komputery kwantowe.(0
). (13.2)

Literatura
1. Sabatier, Pierre C.(F-MONT2-PT) Nonuniqueness in inverse problems. (En-glish. English summary) J. Inverse Ill-Posed Probl. 4 (1996), no. 4, 307–316.
2. Yu P. Petrov, V.S. Sizikov: Well-posed, Ill-posed, and Intermediate Problemswith Applications (Inverse and Ill-Posed Problems) Publisher: V.S.P. IntlScience.
3. Tarantola, Albert, Inverse Problem Theory and Methods for Model ParameterEstimation, Society for Industrial and Applied Mathematics, Philadelphia, 2005.
4. Dębski W. Metody inwersyjne w [email protected] www.igf.edu.pl ebski
5. Lavrentjev, M.M. Romanov, V.G., Shyshatski S.P, Ill-posed problems of Ma-thematical physics and analysis, M., Nauka, 1980.
6. Tikhonov, A. N. Goncharskij A. V. -editors Ill-posed Problems in Natural Scien-ces Mir Publishers, Moscow, 1987.
7. Tikhonov, A. N.; Samarskiı, A. A. Equations of mathematical physics. Trans-lated from the Russian by A. R. M. Robson and P. Basu. Reprint of the 1963translation. Dover Publications, Inc., New York, 1990.
8. Tikhonov, A. N.; Goncharsky, A. V.; Stepanov, V. V.; Yagola, A. G. Numericalmethods for the solution of ill-posed problems. Translated from the 1990 Russianoriginal by R. A. M. Hoksbergen and revised by the authors. Mathematics andits Applications, 328. Kluwer Academic Publishers Group, Dordrecht, 1995.
9. Curtis R. Vogel Computational methods for inverse problems, Volume 10, SIAM,2002.
10. Sabatier, Pierre C. Three-dimensional impedance scattering theory. Electroma-gnetic and acoustic scattering: detection and inverse problem (Marseille, 1988),245–274, World Sci. Publishing, Teaneck, NJ, 1989.
11. Tikhonov A.N. Arsenin V.Ya., Rubashov I.B. Timonov A.A. DAN SSSR, v 263,872 919820
12. Tikhonov A.N. Arsenin V.Ya., Rubashov I.B. Timonov A.A. Priroda v 4, 11,(1984).
13. Tikhonov A.N. Arsenin V.Ya.,Timonov A.A. Matematiczeskie zadachi kompju-ternoj tomografii M. Nauka 1987.
14. Vladimir Romanov, Inverse problems of mathematical physics, VNU sciencePress Utrecht, Netherland, 1987.
15.

104 Literatura
16. Ivanov V.K. On ill-posed prob;ems. Mat. sb., 1963, bf 61 (103), n2, p.211-223.17. A.Piskorek, Równania całkowe Elementy teorii i zastosowania, WNT, Warszawa
199718. A.N.Tikhonov, A.V.Goncharsky, III-Posed problems in the natural sciences,
MIR Publishers, Moskwa 198719. V.S.Sizikov,Mathematical methods for processing of measurements results, BY3,
Sankt-Petersburg 2001 (in Russian)20. A.D. Poularikas, The Handbook of Formulas and Tables for Signal Processing,
CRC Press, USA 199921. Cormack A.M. Early two-dimensional reconstruction and recent topics stem-
ming from it / Nobel Lectures in Physiology or Medicine 1971—1980. — WorldScientific Publishing Co., 1992. — p. 551—563 Hounsfield G.N. Computed Me-dical Imaging / Nobel Lectures in Physiology or Medicine 1971—1980. — WorldScientific Publishing Co., 1992. — p. 568—586
22. Ivanov V.A. Wizja wewnętrzna (NMR tomografja) Znanie. 1989.23. Anderson V.C. JASA, v45, 398 (1969)24. Kotelnikov V.A. Ón the carrying capacity of the ether and wire in telecommu-
nications”, Material for the First All-Union Conference on Questions of Com-munication, Izd. Red. Upr. Svyazi RKKA, Moscow, 1933 (Russian). (englishtranslation, PDF - Wiki). V. A. Kotelnikov, Teoria potencialnoj pomechoustoj-chivosti. Moskva. Gosenergoizdat. 1956.
25. H. Nyquist, “Certain factors affecting telegraph speed,” Bell Syst. Tech. J.,vol. 3, p. 324, Apr. 1924. R. V. L. Hartley, “The transmission of information,”Bell Syst. Tech. J., vol. 3, p. 535–564, July 1928.C. Shannon, PROCEEDINGSOF THE IRE, vol. 37, no. 1, pp. 10–21, Jan. 1949. Publisher Item Identifier S0018-9219(98)01299-7.
26. Marko D. Petković,Predrag S. Stanimirović,Milan B. Tasić. Effective partitio-ning method for computing weighted Moore-Penrose inverse, Computers andMathematics with Applications archive Volume 55 , Issue 8 (April 2008) Pages1720-1734
27. Tikhonov A.N. (1943). On stability of inverse problems. Dokl. Akad. NaukSSSR, 39 (5), 195–198 (in Russian).
28. George L. Trigg Crucial Experiments in Modern Physics. Dover (Jun 1975)29. George L. Trigg Landmark Experiments in Twentieth Century Physics. Dover.30. R.P. Feynman, R.B. Leighton, M. Sands Feynmana wykłady z fizyki. t.3- me-
chanika kwantowa.31. Dirac, P. A. M. Lecture on Quantum Mechanics (Dover Publications Inc., Mi-
neola, New York) 1930.32. M.J. Duff, L.B. Okun, G. Veneziano, Trialogue on the number of fundamentalconstants, arXiv, physics 110060.
33. Boris N. Zakhariev,Vladimir Chabanov Submissive Quantum Mechanics: NewStatus of the Theory in Inverse Problem Approach. Amazon,2007.quant-ph 207074 Obedient quantum mechanics: New status of the theory in theinverse problem approach. B. N. Zakhariev, V. M. Chabanov. physics.quant-ph.
34. C.M. Linton, P. McIver, Handbook of Mathematical Techniques for Wave-Structure Interactions, CRC Press LLC 2001.
35. T. Morawski, W. Gwarek, Pola i fale elektromagnetyczne, WNT, Warszawa1998.
36. L.B. Okun, Fundamental units: physics and metrology, arXiv, physics 310069.J. Wesson, Tokamaks, 3rd edition, Oxford University Press 2004. Moskva 1955.

Literatura 105
37. S. Leble Rownania różniczkowe i cząstkowe w fizyce i technice. Skrypt, stronadomowa.


14
Załącznuk 1. Uwagi matematyczne
14.1 Uwagi matematyczne.
14.1.1 Podstawowe pojęcza [?]
Rozważmy przesrzeń Banacha X 3 x, która jest obszarem definicji ciągłegooperatora A (DA ⊆ X):
Ax = f ∈ F, (14.1)
gzie F jest też prezetrzeń Banacha.Def. Zagadnenie dotyczące do (??) nazywa się dobrze uwarunkowanym
(well-posed - classic ), jeśli
1. dla każdego f ∈ F istnieje rozwiązanie (??) x ∈ X;2. rozwiązanie (??) jednoznazcznie się definuje f ;3. x zależy ciągle od prawej strony: małym (w metrykie F) zmianom f od-
powiada małe zmiany x (w metrykie X).
Wystarczy żeby istnieł ciagły operator B = A−1.Def. Zagadnenie (??) nazywa się jednostajnie (równomiernie) dobrze uwa-
runkowanym jeśli wzmocnimy trzeczy warunek
1. dla każdego f ∈ F istneje rozwiązanie (??) x ∈ X2. rozwiązanie (??) jednoznzczne3. x zależy ciągle jednostajnie od prawej strony.
Zacytujmy:
Def.* Operator X → F jest zwartym jeśli obraz każdej sfery jest zwarty.Cytaty:A topological space X is compact if every open cover of it has a finitesubcover. In other words, if X is the union of a family of open sets, thereis a finite subfamily whose union is X.A subset of a topological space which is compact with respect to the relativetopology.

108 14 Załącznuk 1. Uwagi matematyczne
http:/mathworld.wolfram.comĆompactSet.htmlWiki: Def.* A set is compact if every sequence in the set has a convergentsubsequence, the limit point of which belongs to the set.In functional analysis, a compact operator (or completely continuous opera-tor) is a linear operator L from a Banach space X to another Banach spaceY, such that the image under L of any bounded subset of X is a (relatively)compact subset of Y.http:/mathworld.wolfram.comĆompactSpace.html
Def. Operator A nazywa sie operatorem pierwszego rodziaju, jeśli operatorA jest zwarty (completely continuous) (jednostajnie ciągłym ?)∗ i żadna sferaw X nie jest zwarta.
Przykład równania pierwszego rodzaju - równanie całkowe Fredholma I-gorodzaju z ciągłym jądrem K(x, s) na [a, b],
Kφ ≡∫ b
a
K(x, s)φ(s)ds = f(x), (14.2)
Dowod: Przestrzeń Banacha definiuje się przez ||φ|| = maxs |φ(s)|, funkcjaK(x,s) jest ograniczoną |K(x, s)| ¬M
1) Niech dla każdego δ > 0, |φ1(s)−φ2| ¬ δ ||f1−f2|| ¬∫ ba|K(x, s)||φ1(s)−
φ2|ds ¬M(b− a)δ ., więc operator K jest ciągłym jednostajnie;2) sfera w X ||φ|| ¬ R patrz też [?]Stw Zagadnenie uzyskania rozwiązania równania (??) dla operatora pierw-
szego rodziaju nie może być dobrze uwarunkowanym, bo operator odwrotnydo zwartego (jednostajnie ciągłego) nie jest ciągłym.
Dowod Nech X0 ∈ X jest sferą. Z ciagłosci jednostajniej wynika że zbiórF0 = A(X0) jest zwarty. Wędług definicji X0 nie jest zwartym więc istniejeciąg xk
a) który nie jest zbieżnym do żadnego elementu X0,b) ciąg fk = A(xk) jest zbieżnym: limk→∞ = f0.Stąd wynika że operator B = A−1 ne jest ciągłym na f0.Uogólnienie klasycznego pojęcia (wg. Hadamarda) dobrego uwarunkowa-
nia wprowadzA. N. Tikhonova w [?]; w podatawie leży idea zwięzenia obszarudefinicji operatora A.
Def Niech w przestrzeni X istnieje podprzestrzeń Y ⊂ X i, jeśli
a priori wiadomo że rozwiązanie X istnieje dla x ∈ Y rozwiązanie jednoznaczne nieskończono małym zmianom f takich że x ∈ Y odpowiada nieskonczono
małe zmiany x.
Zagadnienie (??) nazywa się dobrze uwarunkowanym wędług TikhonowaPodprzestrzeń Y nazywa się zbiórem korektności.Jeśli podprzestrzeń Y jest zwarta, to ważnym jestTwierdzenie Tikhonowa Niech rozwiązanie (??) jest jednoznaczne, Y
jest zwarta i YA ⊂ F - obraz Y przy odwzorawaniu A, wtedy operator odwrotnydo A: B = A−1 jest ciagły jednostajnie.

14.1 Uwagi matematyczne. 109
Dowod Załózmy zalożenie stwierdzenia jest blędne, wtedy istnieje ε0 > 0takie że dla dowolnego δ znajdą się takie x1,2 ∈ Y że
ρX(x1, x2) > ε; ρF (A(x1), A(x2) < δ. (14.3)
Niech δk - ciąg, który dąży do zera przy k → ∞, xk1, xk2 - ciągi ele-mentów Y .
ρX(xk1, xk2) > ε; ρF (A(xk1), A(xk2) < δk). (14.4)
Y jest zbiórem zwartym - więc są podciągi xkj zbieżny w Y .Dalej, załóżmy
x1 = limk→∞
xk1; x2 = limk→∞
= xk2. (14.5)
Wtedy, na wskutek ciąglosci operatora A,
ρX(x1, x2) ε; ρF (A(x1), A(x2)) = 0. (14.6)
Stąd wynika że A(x1) = A(x2), co jest sprzecznie z założeniem twierdzenia ojednoznacznym rozwiązaniu równania (??).
Ważnym następnym krokiem do rzeczywistych zastosowań jest uwzględ-nienie błędów pomiarowych. Z tym jest związane pojęcze kwazirozwiązania(V. Ivanov [?]).
Niech prawa strona równania (??), fε jest znana z błedem ε. Zaznaczmydokładną funkcję literką fT , odpowiednią - dokładne rozwiązanie - jako xt:Axt = fT , wtedy
ρF (fT , fε) ¬ ε. (14.7)
Niech zagadnienie dla (??) zostało sformulowane dobrze uwarunkowane(korektnie) według Tikhonova. Kwazirozwiązaniem wtedy nazywa się elementx ∈ Y taki że wartość funkcjonała ρF (A(y), f) jest minimalna na Y .
ρF (A(x), f) = infy∈Y
ρF (A(y), f) (14.8)
Jeżeli Y jest zwarty, kwazirozwiązanie zawsze istneje.Dalej, rozważmy kwazirozwiązanie x takie że jest spełniony warunek (??)
wtedyρF (A(x), fε) = inf
y∈YρF (A(y), fε). (14.9)
Z nierównosci trojkonta i definicji kwazirozwiązania wynika
ρF (A(x), fT ) ¬ 2ε, (14.10)
zkąd, z kolei, mamy ciąglość zależnosci kwazirozwiązania od prawej strony(??), co oznacza
ρX(x, xT ) ¬ ω(2ε) ≡ supxj∈Y
ρX(x1, x2), ρF (A(x1), A(x2)) ¬ ε, (14.11)
co pozwala na ocenę, lecz kwazirozwiązanie jest rozwiązaniem przybliżonymz kontrolowanymi błędami.

110 14 Załącznuk 1. Uwagi matematyczne
14.1.2 Regularyzacja
Rozważmy przesrzeń Banacha X 3 x, oraz F 3 f . Nech, dalej rownanie
Ax = f (14.12)
modeluje pewne pomiary za pomocu operatora A.Def 1. Operator R(f, α) nazywa sie regularyzającym (operatorem regu-
laryzacji) w otoczeniu elementu fT = A(xT ) jeżeli dla dowolnych wartosciparametru skalarnego α i f ∈ F , które spelnia warunki
1) istnieje α0, δ0 taki że 0 < α < α0, ρ(f, fT ) < δ02) istneje funkcja α(δ) taka że dla dolwolnego ε > 0 znajdzie się δ(ε) < δ0
takie że if ρ(f, fT ) < δ(ε), wtedy ρ(xα, xT ) < ε, gdzie xα = R(f, α(δ)). αnazywa się parametrem regularyzacji.
Def 2. Operator R(f, α(δ)) nazywa się regularyzującym (operatorem re-gularyzacji) dla rownania (??) w F1 ⊂ F jeśli on jest operatorem regularyzacjiw otoczeniu kazdego elementu F1. Podkreślimy ze F1 ⊂ XA, gdzie X0 - zbiorwartości operatora.
Rozważmy teraz zagadnienie uzyskania przyblizonego rozwiązaia (??) poelementu fδ prawej strony (??) z dokladnosciu
ρ(fT , fδ) < δ.
Zalóżmy udało się zbudować operator R w otoczeniu fT . Z definicji opera-tora regularyzacji wynika ze przy δ < δ0 mozna brać wartości operatora naelemencie fδ jako rozwiązanie przybliżone przy wartosci α odpowiedniej oce-nie δ. Przy rozwiązywaniu konkretnego równania (??), które modeluje pewenproces (opis).
Dwa przypadki są możliwe.
I. If ε - oszacowanie błędu dopuszczalnego przy rozwiązaniu równania.Wtedu - problem w uzyskaniu δ(ε)- wymaganej dokładnoisci pomiarów prawejczęsci i parametra regularyzacji α(δ).
II. Dokladnosc pomiarów δ jeat jako podana. Problem jest w uzyskaniuwartosci parametra regularyzacji (α) dla któregobłąd w rozwiazaniu jest mi-nimalny.
Def. 3 Operator R(f, α) nazywa się regularyzającym jednostajnie dla rów-nania (??), na zbiorze F1, jeśli 1) istnieją takie liczby α0, δ0, że operator
R(f, α) jest zdefiniowany dla dowolnych α, f, fT dla ktorych spelnione są wa-runki 0 < α < α0, ρF (f, fT ) < δ0, fT ∈ F1. 2) istneje funkcja α(δ) taka że dla
dowolnego ε > 0 znajdie się δ(ε) < δ0 takie że
Dostateczny warunek tego że by operator był regularyzającym dlarównania.
Twierdzenie 1 Niech operator G(f, α), F → X spełnia warunki

14.1 Uwagi matematyczne. 111
1) Opeator G jst zdefiniowany na dowolnych α, f :
0 < α < α0, ρ(fT , f) < δ0
.
2) jest ciągly na fT , limα→0, G(fT , α) = xT .
10 Wtedy operatoe G jest regularyzatorem dla (??) w otoczeniu elementafT . 20 Jeśli 1),2) spelnione są dla każdego fT ∈ F1, G jest regularyzającym na
F1. 30 Jesli operator G dla dowolnego α jest ciąglym jednostajnie i G(A(x), α)
jest regularyzającym
Dowod Nierownosc trojkonta
ρ(G(f, α), xT ) ¬ ρ(xTα, G(f, α)) + ρ(xTα, xT ),
gdzhiexTα = G(fT , α).
Zaznaczmyρ(f, fT ) = δ.
Z ciąglosci G przy α > 0 wynika
ρ(xTα, G(f, α) ¬ β(δ, α, fT ), (14.13)
limδ→0
β(δ, α, fT ) = 0
. mozna rozważac β jako monotniczną funkcje δ.Rozważmy dowolnie małe ε > 0. Na mocy drugiej wlasnosci (??) istneje
α(ε) takie że dla dowolnego α < α(ε) spelniona nierownosc: ρ(xTα, xT ) < ε.Zatem, ρ(xT , G(f, α)) < ε. Drugie jest skutkiem pierwszego. Niech, teraz Gjet jednostajnie ciagly i zbieznosc G(A(x), α) do x jest jednostajna na X1.Wtedy moąna liczyć że funkcja po prawej stronie (??) nie zalezy od fT in F1:β(δ, α, fT ) = β(δ, α), i nierownosci ρ(xT , xTα) < ε, ρ(xTα, g(f, α)) < ε majamejsce przy α < α(ε) dla dowolnych xT ∈ X1, ρ(f, fT ) < δ(α), co oznaczasprwiedliwosc 30.
Oczywyszcze dla jednego rownania (ref) istneje neskonczona ilosc opera-torow regularyzajacych (RO). W przypadkach konkretnych wybor RO zalezyod celi budowy aproximacji po danym z bledami, prostota z punktu widzeniaagorytmow numerycznych.

112 14 Załącznuk 1. Uwagi matematyczne
14.1.3 Liniowe zle uwarunkowane zagadnienia.
Teoria patrz []1. Niech X,F - przestrzeni Banacha. A - ciagly liniowy operator X rightar-
row F. Rozwazmy liniowe rownanie
Ax = f. (14.14)
Dopuscmy (??) rozwiazuje się jednoznacznie i.e. operaor odwrotny do A, mia-nowicze A−1 istneje na XAnF , zbiorze
Niech rozwiązanie (??) jest jednoznaczne ,Y=Y’+Y” jest sumą prostą (al-gebraiczną), gdzie Y’ jest zwartym, ale Y” jest przestrzenią skończone wymia-rową. Wtedy na zbiórze YA wartosci Ax, x ∈ Y , operator A−1 jest jednostajnieciaglym.
Dowód Niech stwierdzenie nie jest prawidłowym. Wtedy istneją podciągix′jk ∈ Y ′, x′′jk ∈ Y ′′, δk, j = 1, 2; k = 1,∞ i liczba ε > 0 taki że
||x′1k − x′2k + x′′1k − x′′2k|| < ε
,
δk
lim δk = 0.
Wsrod mozliwych funkcjonalow mozna wydzielic podklas zwiazanych zesturture liniowa tych przestrzeni
Niech X− jest przestrzenią Banacha zwarte włożoną i wszedzie gęstą wX. Funkcjonal φ(x) = γ(||x||X) gdzie γ - funkcja z T∞ będzie oczywisciestabilizującym. Jeśli F, X i funkcje γ(t), γ(t) ∈ T∞ sczisle wypukłe.
W teorii zagadnień korektnych po Tikhonowu podprzestrzen X czesto za-daje sie nastepujaco X = x : x = Bx1x1 ∈ X1 gdzie B - operator zu-pełnie ciagly X1− > X. W przypadku, gdyX,X1, F sa przestrzeni Hilberta,wtedy element minimalizujacy wygladzajacy funkcjonal znajduja sie w po-staci jawnej. Rozwazmy wiec funkcjonal wygladzajacy typu () dla () wyberajaγ(t) = γ(t) = t2 = ψ(x, α) = (Ax − f,Ax − f)F + α(B−1x,B−1x)X1 . Ele-ment x1 na ktorym funkcjonal osiąaga minimum jest rozwiazaniem rownaniaEulera.
(AB)∗(ABx1 − f) + αx1 = 0, (14.15)
więc,x1 = [αE + (AB) ∗AB]−1(AB) ∗ f
x = Bx1 = B[αE + (AB) ∗AB]−1(AB) ∗ f. (14.16)
na mocy Tw 4 (??) związku pomięzy kwazirozwiązaniem i operatorami regu-laryzacj dla zbiórow korektnosci wędług relacji Y a = x : x = Bx1, ||x1|| ¬ akwazirozwiązanie buduje się po (??) przy określionej wartości parametraα = α. Liczba α znajduje się z relacij

14.1 Uwagi matematyczne. 113
Def. 1 Rodzina operatorow Rα, 0 < α < α0 z F w X nazywa się regulary-zującej rownanie () na Z if
1) dla dowolnego αRα jest zdefiniowanym operatorem i ograniczonym2) dla dowolnego x ∈ Z; limα→0RαAx = x.jeśli zbieżność w 2 jest jednostajna na Z, Rα nazywa się jednostajnym
operatorem regularyzacji (regularyzającym jednostajnie).Z nazywa sie zbiórem regularyzacji (jednostajnej) rownania (??) dla ro-
dziny Rα. Zawsze jest liniowa podprzestrzeniu X.Rodzina Rn nazywa się rodziną operatorów reg. if
1) dla ∀n > 0D(Rα) = F i ||Rα|| <∞2) dla ∀x ∈ Z, limn→∞RαAx = xRozwazmy problem budowy rozwązania przybliżonego po przybliżonym
danymNiech
AxT = fT , (14.17)
i mamy fε; |||fT − fε| ¬ ε.Zaznaczmy
xαε = Rαfε. (14.18)
Wprowadzmyβ(α) = sup
||RαAx− x||, (14.19)
wtedy||xαε − xT || ¬ ||Rα||ε+ β(α). (14.20)
Można zminimizowac prawą stronę wybierając α = α(ε).
||Rα||ε+ β(α) = infα||Rα||ε+ β(α). (14.21)
————Przykłady rodzin regularyzacji (3e metody)