indirektno vektorsko vodenje asinhronskega motorja v orientaciji rotorskega magnetnega sklepa
DESCRIPTION
Indirektno vektorsko vodenje asinhronskega motorja v orientaciji rotorskega magnetnega sklepa. Predmet: Dinamika sistemov. Kazalo. Uvod Model asinhronskega motorja Načrtovanje vodenja - PowerPoint PPT PresentationTRANSCRIPT
Dinamika sistemov
Avtor: Evgen Urlep
Datum: 9. 7. 2004
Indirektno vektorsko vodenje asinhronskega Indirektno vektorsko vodenje asinhronskega motorja v orientaciji rotorskega magnetnega motorja v orientaciji rotorskega magnetnega
sklepasklepa
Indirektno vektorsko vodenje asinhronskega Indirektno vektorsko vodenje asinhronskega motorja v orientaciji rotorskega magnetnega motorja v orientaciji rotorskega magnetnega
sklepasklepa
Predmet: Predmet: Dinamika sistemovDinamika sistemov

IFOC AM
22
KazaloKazaloKazaloKazalo
UvodUvod Model asinhronskega motorjaModel asinhronskega motorja Načrtovanje vodenjaNačrtovanje vodenja
• Blokovna shema indirektno vektorskega vodenja Blokovna shema indirektno vektorskega vodenja asinhronskega stroja v orientaciji rotorskega asinhronskega stroja v orientaciji rotorskega magnetnega sklepamagnetnega sklepa
• Načrtovanje tokovnega regulatorjaNačrtovanje tokovnega regulatorja• Razklopitev križnih vplivovRazklopitev križnih vplivov• Načrtovanje hitrostnega regulatorjaNačrtovanje hitrostnega regulatorja

IFOC AM
33
KazaloKazaloKazaloKazalo
• Načrtovanje regulatorja magnetenjaNačrtovanje regulatorja magnetenja– Diskretni PI regulator z limitoDiskretni PI regulator z limito– Diskretni PI regulator z »antiwindup« strukturoDiskretni PI regulator z »antiwindup« strukturo– Diskretni PI regulator na osnovi DEDiskretni PI regulator na osnovi DE– Diskretni sliding-mode regulatorDiskretni sliding-mode regulator
• Primerjava stopničnih odzivov regulatorjev z omejenem izhodomPrimerjava stopničnih odzivov regulatorjev z omejenem izhodom• Diskretni sliding-mode regulator v a-b koordinatahDiskretni sliding-mode regulator v a-b koordinatah• Diskretni PI regulator s kompenzacijo vrtenjaDiskretni PI regulator s kompenzacijo vrtenja
Simulacijski rezultatiSimulacijski rezultati• Simulacija delovanja PI regulatorja v a-b koordinatahSimulacija delovanja PI regulatorja v a-b koordinatah• Simulacija delovanja SM regulatorja v a-b koordinatahSimulacija delovanja SM regulatorja v a-b koordinatah• Primerjava simulacijskih rezultatovPrimerjava simulacijskih rezultatov
ImplementacijaImplementacija ZaključekZaključek LiteraturaLiteratura

IFOC AM
44
UvodUvodUvodUvod
SkalarnoSkalarno• U/fU/f• JoensJoenssosonn
VektorskoVektorsko• IFOCIFOC• DFOCDFOC• DTCDTC
Osnovna naloga asinhronskega motorja (AM) je Osnovna naloga asinhronskega motorja (AM) je proizvajanje navora. Cilj je zagotoviti učinkovito vodenje, proizvajanje navora. Cilj je zagotoviti učinkovito vodenje, oz. proizvajanje navora z upoštevanjem lastnosti objekta oz. proizvajanje navora z upoštevanjem lastnosti objekta vodenja. Pristop k vodenju AM se da razdeliti na vodenja. Pristop k vodenju AM se da razdeliti na naslednje skupinenaslednje skupine::
IFOC AM
55
1
w
1s
omega
Tb
1s
Psirb
1s
Psira
1s
Isb
1s
Isa
[omega]
[Tel]
[psirb]
[isb]
[psira]
[isa]
-K-
Lm/Lr
Rs
-K-
-K-
Rr/Lr
-K-
Lm/Lr
B
1/Jp
Rr/Lr
Rs
-K-
[isb]
[psira]
[omega]
[psirb]
[isa]
3
Tm
2
Ub
1
Ua
ub
ua
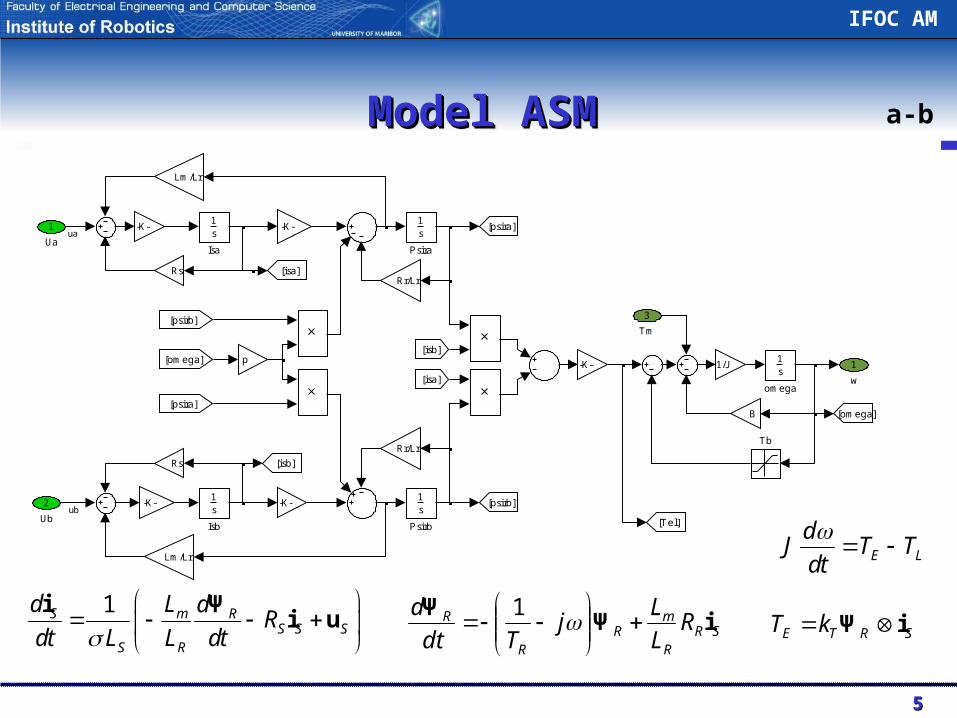
Model ASMModel ASMModel ASMModel ASM
1S m RS S S
S R
d L dR
dt L L dt
i Ψi u
SRR
mR
R
R RL
Lj
Tdt
diΨ
Ψ
1
E T R ST k Ψ i
E L
dJ T T
dt
a-b

IFOC AM
66
Model ASMModel ASMModel ASMModel ASM' '
' '
1sd rs sd sd rd e s sq
s s r
di Ki u i
dt R R
' '' '
1sq rs sq sq r rd e s sd
s s
di Ki u p i
dt R R
rdr rd m sd
dL i
dt
3
2e r rd sqT pK i
d-q

IFOC AM
77
Blokovna shema IFOCBlokovna shema IFOCBlokovna shema IFOCBlokovna shema IFOC

IFOC AM
88
Načrtovanje tokovnega Načrtovanje tokovnega PI PI regulatorjaregulatorjaNačrtovanje tokovnega Načrtovanje tokovnega PI PI regulatorjaregulatorja
' '
( ) 1 1( )
( ) 1s
os s s
i sF s
u s R s
1( ) i ii
piii
K sTF s
sT
'ii sT
1 ( )( )
z H sH z Z
z s
'
'
2'
1 1( )
s
s
T
O Ts
eF z z
R z e
-0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
0.9/T
0.8/T
0.7/T
0.6/T0.5/T
0.4/T
0.1/T
0.2/T
0.3/T
0.7/T
0.5/T0.4/T
0.3/T
0.2/T
0.1/T
/T
0.8
0.8/T
0.9
0.6/T
0.1
0.9/T
0.6
/T
0.7
0.20.30.40.5
System: foz Gain: 0.161
Pole: 0.686 + 0.205i Damping: 0.754
Overshoot (%): 2.71 Frequency (rad/sec): 2.21e+003
Root Locus
Real Axis
Imag
inar
y A
xis
Tii= 0.0024 s, Kr=0.16
0 1[ ] [ 1] [ ] [ 1]y k y k q u k q u k
PI
0 (1 )2p
i
Tq K
T
1 (1 )2p
i
Tq K
T
Proga

IFOC AM
99
Tokovni PI regulatorTokovni PI regulatorTokovni PI regulatorTokovni PI regulator
5 10 15 20 25 30
-4
-3
-2
-1
0
1
x 104
eisd
(A)
d isd (
A/s
)
-25
-20
-15
-10
-5
0
Mag
nitu
de (
dB)
System: fz Frequency (rad/sec): 1.99e+003 Magnitude (dB): -3.01
101
102
103
104
105
-720
-540
-360
-180
0P
hase
(de
g) System: fz Frequency (rad/sec): 725 Phase (deg): -45.1
Bode Diagram
Frequency (rad/sec)
725 rad/s (115 Hz)

IFOC AM
1010
Vpliv spremembe Rs na regulator tokaVpliv spremembe Rs na regulator tokaVpliv spremembe Rs na regulator tokaVpliv spremembe Rs na regulator toka
0 0.002 0.004 0.006 0.008 0.01 0.0120
2
4
6
8
10
12
1.5Rs
0.5Rs
Rs
Step Response
Time (sec)
Am
plitu
de
0.6 0.7 0.8 0.9 1
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.9
0.1/T
0.2/T
0.1/T
0.2
0.2/T
0.7
0.10.3
0.80.6
0.40.5
1.5Rs
0.5R
s
R
s
Pole-Zero Map
Real Axis
Imag
inar
y A
xis

IFOC AM
1111
Razklopitev kriRazklopitev križnih vplivovžnih vplivovRazklopitev kriRazklopitev križnih vplivovžnih vplivov
Razklopitev po d- koordinati
2
* * mrsd sd s e sq rd sd s e sq r mr
r r
LKu u L i u L i R i
L
Razklopitev po q- koordinati
2* * m
sq sq s e sd r r rd sq s e sd r mrr
Lu u L i K p u L i p i
L
Relacija med d-komponento rotorskega magnetnega sklepa in magnetilnim tokom je
rd m mrL i
IFOC AM
1212
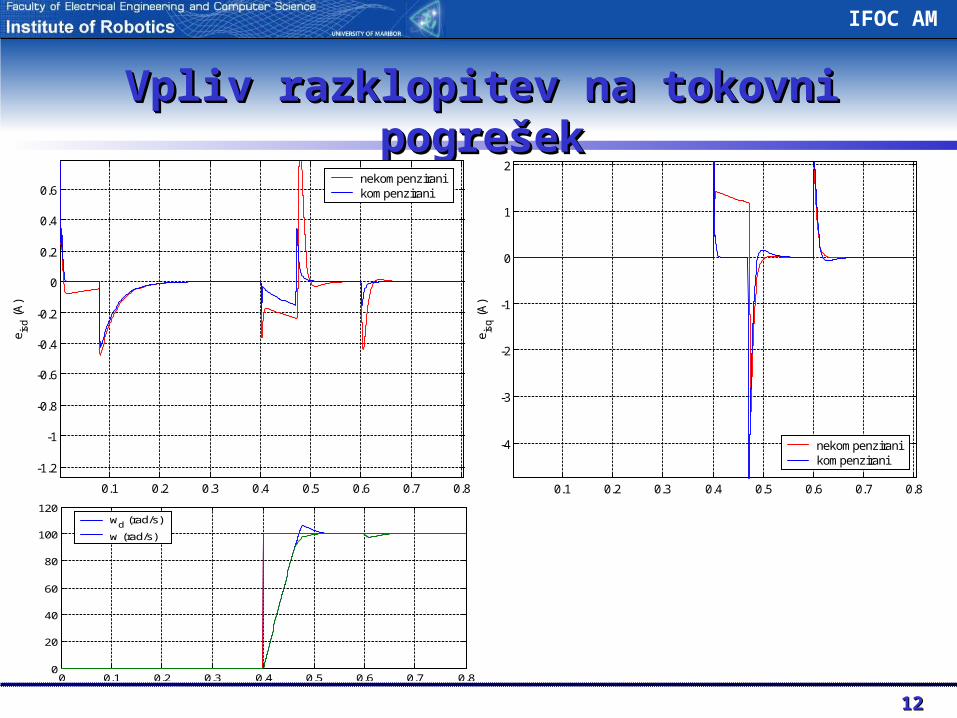
Vpliv razklopitev na tokovni pogrešekVpliv razklopitev na tokovni pogrešekVpliv razklopitev na tokovni pogrešekVpliv razklopitev na tokovni pogrešek
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8
-1.2
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
e isd (
A)
nekompenziranikompenzirani
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8
-4
-3
-2
-1
0
1
2
e isq (
A)
nekompenziranikompenzirani
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.80
20
40
60
80
100
120w
d (rad/s)
w (rad/s)

IFOC AM
1313
Načrtovanje hitrostnega regulatorjaNačrtovanje hitrostnega regulatorjaNačrtovanje hitrostnega regulatorjaNačrtovanje hitrostnega regulatorja
1
( )1
Js J
B
H ss
1( )
1iic
H ssT
3
2t r rdK pK
Proga
Tv= 0.0235 s, Kv=3.27 Metoda simetričnega optimuma
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.80
20
40
60
80
100
120w
d (rad/s)
w (rad/s)

IFOC AM
1414
Načrtovanje Načrtovanje PI PI regulatorja magnetilnega tokaregulatorja magnetilnega tokaNačrtovanje Načrtovanje PI PI regulatorja magnetilnega tokaregulatorja magnetilnega toka
rdr rd m sd
dL i
dt
mr m rdi L
0 1[ 1] [ ]mr mr mr mr di k q i k q i 0
s rmr
r
T Rq
L 1 01mr mrq q
Diferenčna enačba, uporabljena za izračun
Diferencialna enačba
0.1318 srimr r
r
LT
R
PI regulator je načrtan po metodi kompenzacije pola
( ) ( ) imroimr imr imr
imr
KF H s F s
sT
Prenosna f. odprte zanke
Prenosna funkcija zaprte zanke je
( ) 1( )
1 ( ) 1
oimrzimr
imroimr
imr
F sH s
TF s sK
4imrK 0.0329 s ( =0.1647 s)zimr nT t
Nivo magnetenja je odvisen od parametrov Rr, Lr, Lm
IFOC AM
1515
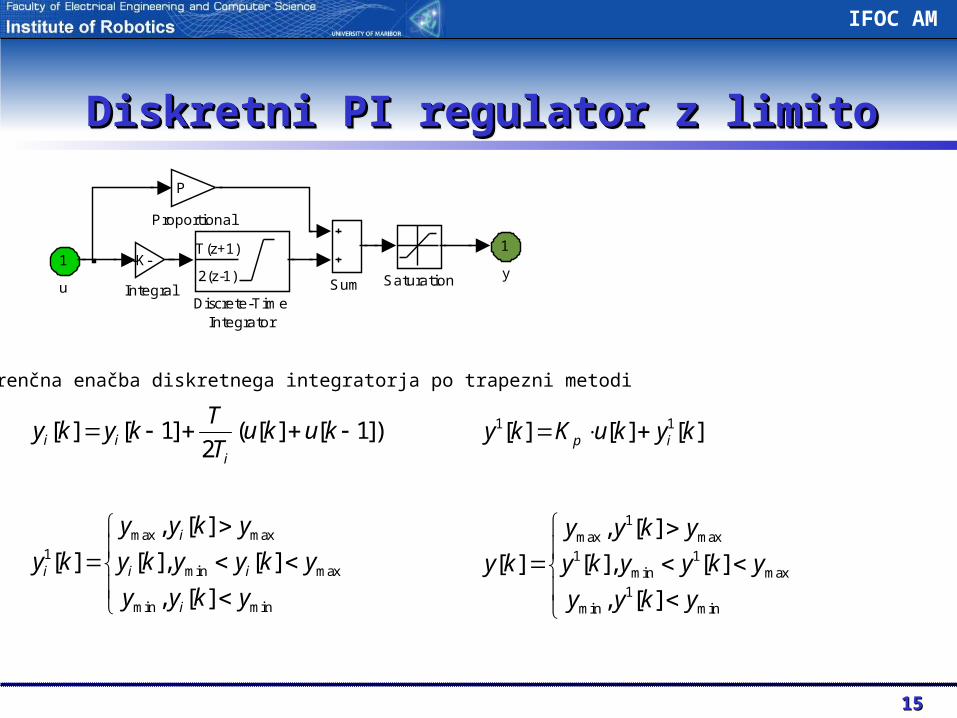
Diskretni PI regulator z limitoDiskretni PI regulator z limitoDiskretni PI regulator z limitoDiskretni PI regulator z limito
1
ySum Saturation
P
Proportional
-K-
Integral
T(z+1)
2(z-1)
Discrete-TimeIntegrator
1
u
[ ] [ 1] ( [ ] [ 1])2i i
i
Ty k y k u k u k
T
max max1
min max
min min
, [ ]
[ ] [ ], [ ]
, [ ]
i
i i i
i
y y k y
y k y k y y k y
y y k y
Diferenčna enačba diskretnega integratorja po trapezni metodi
1 1[ ] [ ] [ ]p iy k K u k y k
1max max
1 1min max
1min min
, [ ]
[ ] [ ], [ ]
, [ ]
y y k y
y k y k y y k y
y y k y

IFOC AM
1616
Diskretni PI regulator z »antiwindup« strukturoDiskretni PI regulator z »antiwindup« strukturoDiskretni PI regulator z »antiwindup« strukturoDiskretni PI regulator z »antiwindup« strukturo
y11
y
-K-
Saturation
P
Proportional
P*I
Integral
T
z-1
1
x y i
[ ] [ 1] ( [ ] [ 1])2i i i i
i
Ty k y k u k u k
T
[ ] [ ] [ 1]i p awu k K u k u k
1[ ] [ ] [ ]p iy k K u k y k
1max max
1 1min max
1min min
, [ ]
[ ] [ ], [ ]
, [ ]
y y k y
y k y k y y k y
y y k y
1 1max max
1min max
1 1min min
( [ ] ), [ ]
[ ] 0, [ ]
( [ ] ), [ ]
a
aw
a
T y k y y k y
y k y y k y
T y k y y k y
1
y
sum
f(u)
limit
f(u)
antiwindup
z
1
alg.loop {Ta}
{limit}
{Ti}
{Kp}
T(z+1)
2(z-1)
Discrete-TimeIntegrator
1
u
y _aw
IFOC AM
1717
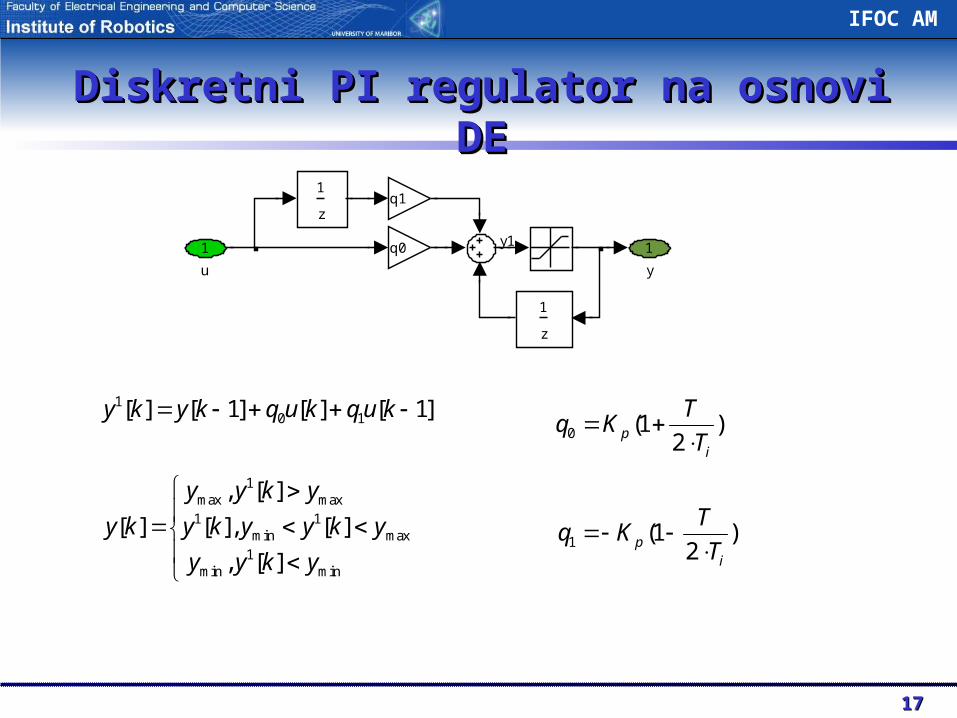
Diskretni PI regulator na osnovi DEDiskretni PI regulator na osnovi DEDiskretni PI regulator na osnovi DEDiskretni PI regulator na osnovi DE
10 1[ ] [ 1] [ ] [ 1]y k y k q u k q u k
1max max
1 1min max
1min min
, [ ]
[ ] [ ], [ ]
, [ ]
y y k y
y k y k y y k y
y y k y
0 (1 )2p
i
Tq K
T
1 (1 )2p
i
Tq K
T
y1 1
y
z
1
z
1
q1
q01
u

IFOC AM
1818
Diskretni sliding-mode regulatorDiskretni sliding-mode regulatorDiskretni sliding-mode regulatorDiskretni sliding-mode regulator
( , ) ( )x f x t B x u
{ : ( , ) 0}S x x t
Zapis nelinearnega sistema
Drsna ploskev
( )dG x x Pogrešek
Kandidat Ljapunove funkcije
02
T
v in 0Tv
0Tv D
Odvod Ljapunove funkcije mora biti negativno def. f.
1( ) ( ) ( ) ( ), , 0y t y t GB D t t
( ) ( 1)d k k
dt T
( ) ( 1)d k k
dt T
[ ] [ 1] ((1 ) [ ] [ 1])sKy k y k TD u k u k
T
D
Krmilna funkcija
D mora biti pozitivno definitna funkcija
1
sK GB

IFOC AM
1919
Izvedba diskretnega SM regulatorjaIzvedba diskretnega SM regulatorjaIzvedba diskretnega SM regulatorjaIzvedba diskretnega SM regulatorja
(1 )( 1)
1
sKT
sm
TD zF
z
1
y
z
1
z
1
Saturation
-K-
1/GBT
1+Tsam*D
1+TD
1
x
Primer SISO SM regulatorja
Prenosna funkcija v z prostoru
0 2 4 6 8 10 12 14 16 18 20-250
-200
-150
-100
-50
0
eimr
(A)
dei m
r (A
/s)
-D

IFOC AM
2020
Primerjava stopničnih odzivov regulatorjev z Primerjava stopničnih odzivov regulatorjev z omejenem izhodomomejenem izhodom
Primerjava stopničnih odzivov regulatorjev z Primerjava stopničnih odzivov regulatorjev z omejenem izhodomomejenem izhodom
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8-5
0
5
10
15
20K
p1=2
Kp1
=4
Kp2
=4
Kp3
=2
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.80
5
10
15
20
25
30K
p1=2
Kp1
=4
Kp2
=4
Kp3
=2
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.80
2
4
6
8
10
12
14
16
18
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.816
18
20
22
24
26
28
30
0 2 4 6 8 10 12 14 16 18 20-250
-200
-150
-100
-50
0
eimr
(A)
dei m
r (A
/s)
Kimr
=4
-Kr L
r/R
r (K
imr=4)
Kimr
=2
0 2 4 6 8 10 12 14 16 18 20-250
-200
-150
-100
-50
0
eimr
(A)
dei m
r (A
/s)
-D
IFOC AM
2121
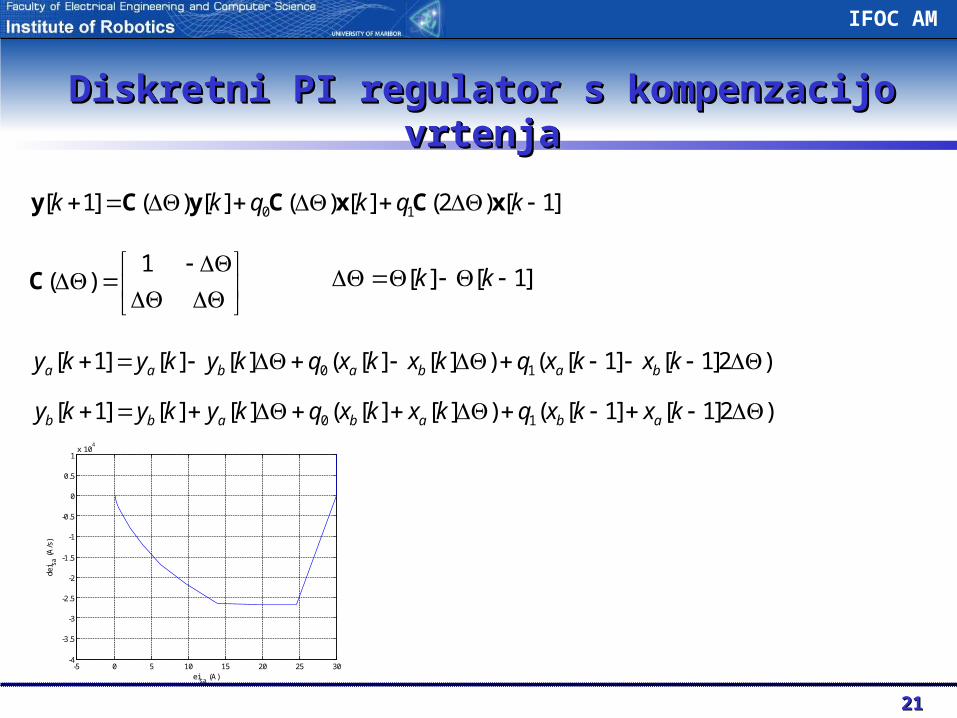
Diskretni PI regulator s kompenzacijo vrtenjaDiskretni PI regulator s kompenzacijo vrtenjaDiskretni PI regulator s kompenzacijo vrtenjaDiskretni PI regulator s kompenzacijo vrtenja
0 1[ 1] ( ) [ ] ( ) [ ] (2 ) [ 1]k k q k q k y C y C x C x
1( )
C
0 1[ 1] [ ] [ ] ( [ ] [ ] ) ( [ 1] [ 1]2 )a a b a b a by k y k y k q x k x k q x k x k
0 1[ 1] [ ] [ ] ( [ ] [ ] ) ( [ 1] [ 1]2 )b b a b a b ay k y k y k q x k x k q x k x k
-5 0 5 10 15 20 25 30-4
-3.5
-3
-2.5
-2
-1.5
-1
-0.5
0
0.5
1x 10
4
eisa
(A)
dei sa
(A
/s)
[ ] [ 1]k k

IFOC AM
2222
Diskretni sliding-mode regulator v a-b Diskretni sliding-mode regulator v a-b koordinatahkoordinatah
Diskretni sliding-mode regulator v a-b Diskretni sliding-mode regulator v a-b koordinatahkoordinatah
1[ ] ( ) [ 1] ( ) (( ) ( ) [ ] (2 ) [ 1])k k k k y C y GBT I TD C u C u
11 12
21 22
[ 1] [ ]cos( ) sin( )
[ 1] [ ]sin( ) cos( )
[ ]1 0 cos( ) sin( ) cos(2 ) sin(2 )
[ ]0 1 sin( ) cos( ) sin(2 ) cos(
a a
b b
a
b
y k y k K K
y k y k K K
i kTD
i kTD
[ 1]
[ 1]2 )a
b
i k
i k
111 12
21 22
K KT
K K
GBcos( ) sin( )
( )sin( ) cos( )
C
[ ] [ 1]k k
-5 0 5 10 15 20 25 30-4
-3.5
-3
-2.5
-2
-1.5
-1
-0.5
0
0.5
1x 10
4
eisd
(A)
dei sd
(A
/s)

IFOC AM
2323
PI regulator v d-q koordinatahPI regulator v d-q koordinatahPI regulator v d-q koordinatahPI regulator v d-q koordinatah
IFOC z diskretnim PI regulatorjem v d-q koordinatah
wdw
wd
x y
smc dusd
dusq
razklopitev
p
isddisd imrdimr
imr0
imr
hitrosti
fiel
eisqeisd
eibeia
d
fi
q
a
b
dq/ab1
d
fi
q
a
b
dq/ab
x dx
d/dt2
x dx
d/dt1
x dx
d/dt
a
fi
b
d
q
ab/dq
Tokovi
iq
idslip
Slip
isb
[eib]
isa
[eia]
[deisd]
isq
isd
[ew]
[eisq]
we
[eisd]
pwr
[eimr]
[deimr]
[imrd]
[dew]
[w]
[wd] [isqd]
[isdd]
[fi]
[isqd]
[isdd] [eib]
[isb]
[isa]
[eia]
[fi]
[eisq]
[imr]
[eisd]
[fi]
[eimr]
[imr]
[ew]
[w]
[wd]
[eisd]
[isq]
[isd]
[fi][fi]
T(z+1)
2(z-1)
Ua
Ub
ia
ib
Speed
ASM

IFOC AM
2424
Pogreški tokovnega PI regulatorja v d-q Pogreški tokovnega PI regulatorja v d-q koordinatahkoordinatah
Pogreški tokovnega PI regulatorja v d-q Pogreški tokovnega PI regulatorja v d-q koordinatahkoordinatah
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8
-1.2
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
e isd (
A)
nekompenziranikompenzirani
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8
-4
-3
-2
-1
0
1
2
e isq (
A)
nekompenziranikompenzirani

IFOC AM
2525
PI regulator v a-b koordinatahPI regulator v a-b koordinatahPI regulator v a-b koordinatahPI regulator v a-b koordinatah
IFOC z diskretnim PI regulatorjem v a-b koordinatah
wdw
wd
p
isddisd
isbisa
imrdimr
imr0
imr
hitrosti
fiel
eisq1
eisqeisd
eisb
eibeia
d
fi
q
a
b
dq/ab1
d
fi
q
a
b
dq/ab
x dx
d/dt2
x dx
d/dt1
x dx
d/dt
a
fi
b
d
q
ab/dq1
a
fi
b
d
q
ab/dq
-K-
Ts
Tokovi
iq
idslip
Slip
sa
sb
wsT
ua
ub
PI_ab
isb
[eib]
isa
[eia]
[deisa]
isq
isd
eisq
eisd
[ew] eisb
we
eisa
pwr
[eimr]
[deimr]
[imrd]
[dew]
[w]
[wd] [isqd]
[isdd]
[fi]
[isqd]
[isdd] [eib]
[isb]
[isa]
[eia]
[fi]
[eisb]
[eisa]
[fi]
[isb][isa] [eisb][eisa]
[we]
[eisq]
[imr]
[eisd]
[fi]
[eimr]
[imr]
[ew]
[w]
[wd]
[eisa]
[isq]
[isd]
[fi]
[fi]
T(z+1)
2(z-1)
Ua
Ub
ia
ib
Speed
ASM

IFOC AM
2626
Statorski tok in pogrešek toka v a-b koordinatahStatorski tok in pogrešek toka v a-b koordinatah Statorski tok in pogrešek toka v a-b koordinatahStatorski tok in pogrešek toka v a-b koordinatah
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8-40
-30
-20
-10
0
10
20
30
40
i s (A
)
isa
(A)
isb
(A)
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5
eis (
A)
eisa
(A)
eisb
(A)
IFOC AM
2727
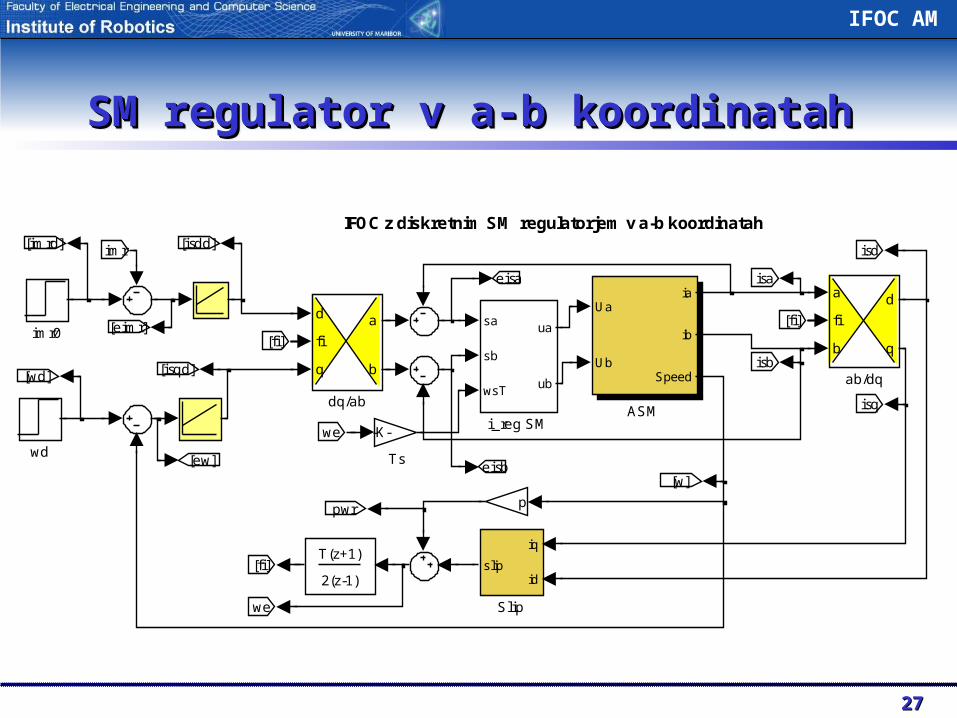
SM regulator v a-b koordinatah SM regulator v a-b koordinatah SM regulator v a-b koordinatah SM regulator v a-b koordinatah
IFOC z diskretnim SM regulatorjem v a-b koordinatah
wdw
wd
p
isddisd
isbisa
imrdimr
imr0
imr
sa
sb
wsT
ua
ub
i_reg SM
hitrosti
fiel
eisq1
eisqeisd
eisb
eibeia
d
fi
q
a
b
dq/ab1
d
fi
q
a
b
dq/ab
x dx
d/dt2
x dx
d/dt1
x dx
d/dt
a
fi
b
d
q
ab/dq1
a
fi
b
d
q
ab/dq
-K-
Ts
Tokovi
iq
idslip
Slip
isb
[eib]
isa
[eia]
[deisa]
isq
isd
eisq
eisd
[ew] eisb
we
eisa
pwr
[eimr]
[deimr]
[imrd]
[dew]
[w]
[wd] [isqd]
[isdd]
[fi]
[isqd]
[isdd] [eib]
isb
isa
[eia]
[fi]
eisb
eisa
[fi]isbisa eisbeisa
we
eisq
imr
eisd
[fi]
[eimr]
imr
[ew]
[w]
[wd]
eisa
isq
isd
[fi]
[fi]
T(z+1)
2(z-1)
Ua
Ub
ia
ib
Speed
ASM

IFOC AM
2828
Statorski tok in pogrešek toka v a-b koordinatah Statorski tok in pogrešek toka v a-b koordinatah Statorski tok in pogrešek toka v a-b koordinatah Statorski tok in pogrešek toka v a-b koordinatah
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8-40
-30
-20
-10
0
10
20
30
40
i s (A
)
isa
(A)
isb
(A)
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8
-2
-1
0
1
2
3
eis (
A)
eisa
(A)
eisb
(A)
IFOC AM
2929
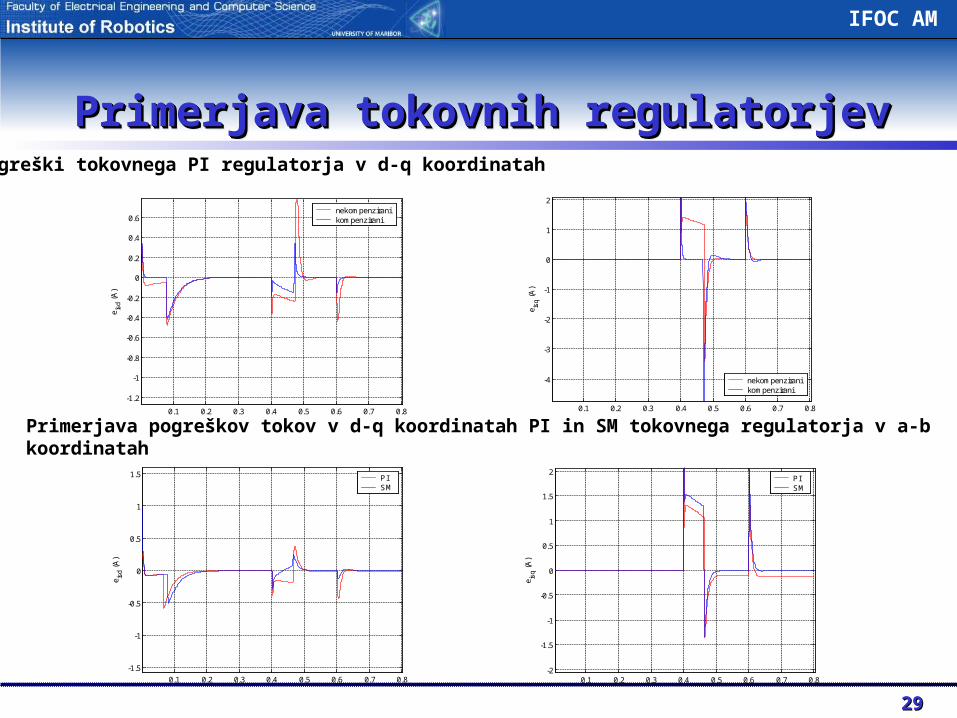
Primerjava tokovnih regulatorjevPrimerjava tokovnih regulatorjevPrimerjava tokovnih regulatorjevPrimerjava tokovnih regulatorjev
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8
-1.5
-1
-0.5
0
0.5
1
1.5
e isd (
A)
PISM
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
e isq (
A)
PISM
Primerjava pogreškov tokov v d-q koordinatah PI in SM tokovnega regulatorja v a-b koordinatah
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8
-1.2
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
e isd (
A)
nekompenziranikompenzirani
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8
-4
-3
-2
-1
0
1
2
e isq (
A)
nekompenziranikompenzirani
Pogreški tokovnega PI regulatorja v d-q koordinatah
IFOC AM
3030
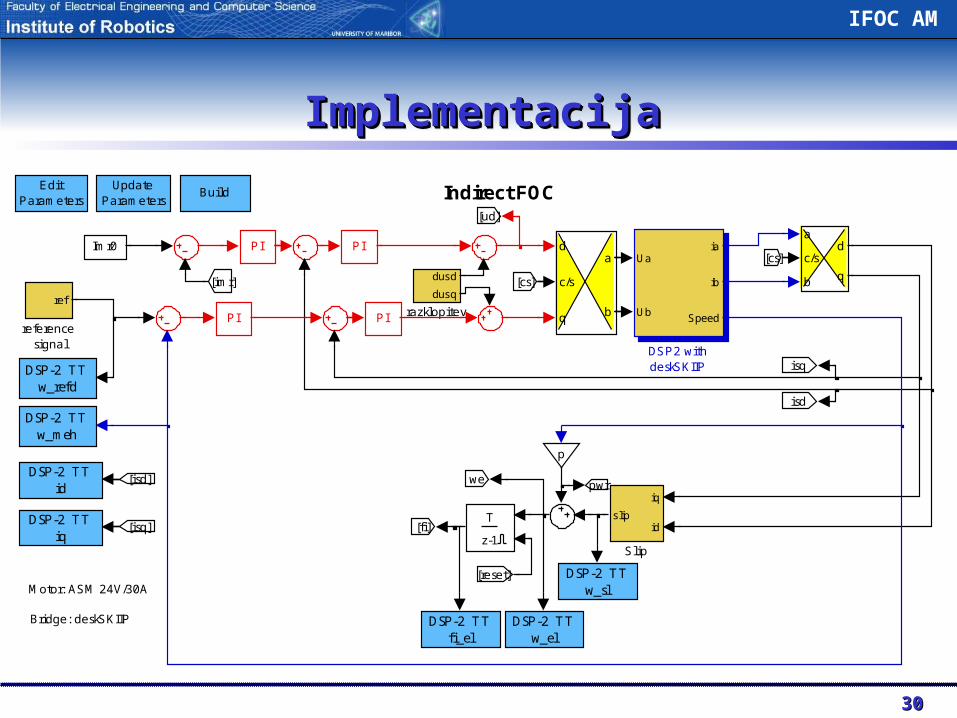
ImplementacijaImplementacijaImplementacijaImplementacija
Indirect FOC
Motor: ASM 24V/30A
Bridge: deskSKIIP
[reset]
ref
reference signal
dusd
dusq
razklopitev
p
a
c/s
b
d
q
d
c/s
q
a
b
sin
cos
DSP-2 TTud
DSP-2 TTfi_el
DSP-2 TTimr
DSP-2 TTw_el
DSP-2 TTw_refd
DSP-2 TTiq
DSP-2 TTid
DSP-2 TTw_meh
DSP-2 TTw_sl
UpdateParameters
BuildEdit
Parameters
iq
idslip
Slip
PI
PI PI
PI
pwrwe
[ud]
isd
isq
[fi]
[cs]
[imr]
[ud]
[imr] [fi]
[isq]
[isd]
[cs]
[cs]
T
z-1
Ua
Ub
ia
ib
Speed
DSP2 withdeskSKIIP
Imr0

IFOC AM
3131
Eksperimentalni odzivEksperimentalni odzivEksperimentalni odzivEksperimentalni odziv
2.5 3 3.5 4 4.5 5 5.5 6 6.5
x 10-3
0
1
2
3
4
5
6
7
8
9
10
Time
Res
pons
e
isd (A)
usd (V)
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-25
-20
-15
-10
-5
0
5
10
15
20
25
Time
Res
pons
e
w (rad/s)is
q (A)

IFOC AM
3232
Odziv eksperimentalnega sistema v COdziv eksperimentalnega sistema v COdziv eksperimentalnega sistema v COdziv eksperimentalnega sistema v C
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-30
-20
-10
0
10
20
30
40
50
60
Time
Response
widiqim
r

IFOC AM
3333
ZaključekZaključekZaključekZaključek
Načrtano je indirektno vektorsko vodenje v koordinatah Načrtano je indirektno vektorsko vodenje v koordinatah rotorskega magnetnega sklepa, njegove načrtane komponente rotorskega magnetnega sklepa, njegove načrtane komponente in s simulacijo analizirano uspešno načrtovanje in preverjeno z in s simulacijo analizirano uspešno načrtovanje in preverjeno z eksperimentom na DSP-2 sistemu.eksperimentom na DSP-2 sistemu.
Vpliv diskretizacije omejuje dinamiko tokovnega regulatorjaVpliv diskretizacije omejuje dinamiko tokovnega regulatorja Vpliv spremembe parametrov poslabša delovanje načrtane Vpliv spremembe parametrov poslabša delovanje načrtane
regulacije.regulacije. Kompenzacija križnih vplivov uspešno izboljša delovanje Kompenzacija križnih vplivov uspešno izboljša delovanje
tokovnih regulatorjevtokovnih regulatorjev Regulatorji z upoštevanjem limit izboljšajo odziv v primeru Regulatorji z upoštevanjem limit izboljšajo odziv v primeru
omejitveomejitve Primerjava različnih izvedb tokovnih regulatorjev pokaže dobro Primerjava različnih izvedb tokovnih regulatorjev pokaže dobro
delovanje enostavnega PI regulatorja, posebno s kompenzacijo delovanje enostavnega PI regulatorja, posebno s kompenzacijo križnih vplivovkrižnih vplivov
Uporaba regulatorja v a-b koordinatah je bolj smiselna v Uporaba regulatorja v a-b koordinatah je bolj smiselna v shemah DFOCshemah DFOC