indice · web viewauthor edgar gonzalez gonzalez created date 05/28/2016 16:48:00 title indice...
TRANSCRIPT

Centro de Bachillerato Tecnológico Industrial y de Servicios N°7José María Morelos y Pavón
MINION-MONSTER EQUIPO #1
DEETHLEAZ PESINA GONZALEZ EDGAR EDUARDO JUAREZ BAUTISTA LUIS LEONARDO DEL ANGEL DEL ANGEL EDITH MARTINEZ SOSA LUIS DIEGO HERNANDEZ NICOLAS YESENIA YAZMIN
UTILIZA Y PROGRAMA MICROCONTROLADORES OSCAR SANCHEZ UREÑO4° B M

INTRODUCCION………………………………………. 3
OBJETIVO………………………………………………4
CAPITULO 1……………………………………………5
CAPITULO 2……………………………………………8
CONCLUSION…………………………………………12
BIBLIOGRAFIA………………………………………...13
2
INDICE

INTRODUCCIÓCuando no se llega a encontrar con chips muy avanzados las personas se ingenian y empiezan a diseñar circuitos más avanzados para así mejorar cada vez más la tecnología. Por lo que llegan a crear circuitos integrados muy pequeños y a la vez muy complejos. En este caso hablaremos de un microcontrolador el cual es un circuito integrado que funciona como una computadora ya que cuenta con 3 unidades fundamentales que son la unidad central de procesamiento, cuenta con dos memorias que son la RAM y ROM y salidas periféricas. El microcontrolador está diseñado para interpretar y procesar un programa en forma binaria.
Existen varios tipos de fabricantes de microcontroladores los cuales pueden ser: TI (Texas Instrument), Motorola, Intel, Atmel, Arduino, Microchip, LG, entre otros. Cada empresa trata de diseñar mejor un micro, pero seguramente unos son más rápidos que otros, tienen más capacidad que otros, periféricos, entre otros detalles.
Pero entre todos estos fabricantes y viendo a cual nos acoplábamos mejor como alumnos y principiantes elegimos trabajar con un microcontrolador de Arduino; claro aparte de que son varios fabricantes de cada uno de ellos existen diferentes tipos de microcontroladores los cuales tienen un uso y una capacidad diferente va desde el más básico hasta el más complejo.
En Arduino existen los siguientes tipos de microcontroladores: Nano, Uno, Leonardo, Atmega, Esplora+Pantalla.
En este proyecto al que nos adaptamos mejor y aplicaremos su uso será al arduino UNO, en este se nos facilitó trabajar ya que entendimos e identificamos como podremos conectarlo.
Al desarrollo de este proyectos tendremos dos capítulos en el primero hablaremos de cada uno de los componentes que se utilizara y en el segundo capítulo se hablara del proceso que se llevó a cabo para la construcción del minion-monster.
3

El objetivo de este proyecto es el desarrollo o aprendizaje de nuevos conocimientos sobre los microcontroladores y como programarlos, como también la retro alimentación sobre los semestres pasados ya que se es necesario la ampliación de pistas o circuitos eléctricos para evitar el uso de los protoboards.
El proyecto ayudara al alumno a ampliarse en este campo de trabajo para desarrollar algún dispositivo de su imaginación el cual emplee sensores y motores lo cual deja un sin número de proyectos a crear, y el último objetivo es el evaluar todo lo aprendidó en este 4to semestre y el 3er parcial de este mismo.
4
OBJETIVO
DESARROLLO CAPITULO
1

Al investigar y ver cuantos tipos de proyectos se pueden realizar con una tarjeta de arduino, se decidió en trabajar con un carrito, el cual se nos hizo muy accesible a lo que hemos aprendido en el transcurso del semestre. El carrito el cual decidimos llamar minion-monster , tiene una función de detectar obstáculos a 15cm de distancia gracias a que cuenta con sensores ultrasónicos, al detectar el obstáculo una de sus llantas se detendrá y la otra seguirá en funcionamiento para poder dirigirse a otro lado o dar la vuelta.En este capítulo se verán cada uno de los componentes que se utilizaran.
SENSORES ULTRASONICOS Los sensores ultrasónicos son muy eficaces ya que en un solo dispositivo puede hacer el trabajo que de otro modo se necesitarían varios sensores. Estos funcionan como detectores de proximidad y detectan a distancias cortas o largas ,estos pueden detectar objetos con diferentes formas , diferentes colores, superficies y diferentes materiales. En este proyecto se utilizará para detectar objetos y que se detenga al detectarlo.
SERVOMOTORESEs un dispositivo pequeño que tiene un eje derendimiento controlado . El motor del servo cuenta con algunos circuitos de control y un potenciómetro, la cual está conectada al eje central del servo motor.
LLANTAS Como todo carro lleva llantas, el proyecto constara con 2 de estas, estas nos ayudaran a que el carrito pueda moverse a donde se le indique.
CIRCUITO L293DEl L293D es un circuito integrado que sirve paracontrolar motores, en este caso nos ayudara acontrolar nuestros servos. Este dispositivo cuenta con
cuatro circuitos integrados internamente los cuales se pueden usar de manera independiente para controlar cargas de todo tipo y el giro de motores.
RUEDA LOCA DE METAL
5

Esta es una rueda sin dirección alguna que puede girar libremente. La rueda loca nos servirá para evitar utilizar dos motores mas. La ventaja de esta rueda es que puede girar a todos lados y nos servira como si fueran dos llantas en una sola.
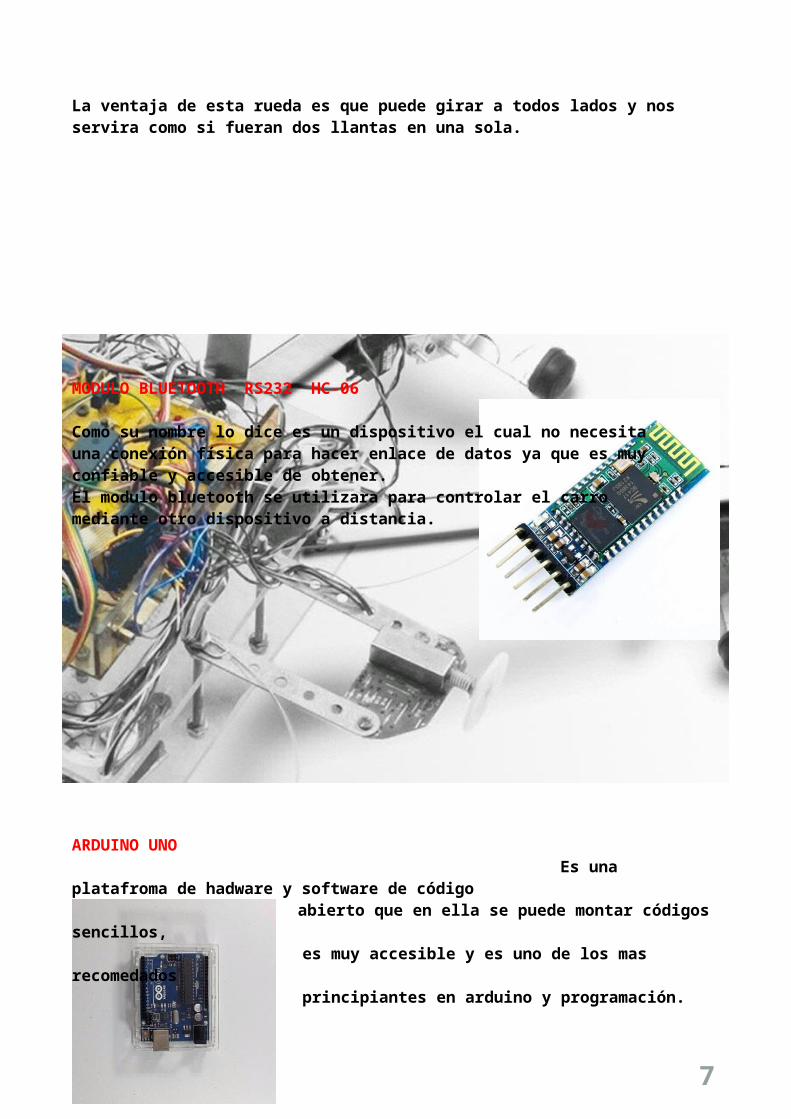
MODULO BLUETOOTH RS232 HC-06
Como su nombre lo dice es un dispositivo el cual no necesitauna conexión física para hacer enlace de datos ya que es muy confiable y accesible de obtener.El modulo bluetooth se utilizara para controlar el carro mediante otro dispositivo a distancia.
ARDUINO UNO Es una platafroma de hadware y software de código
abierto que en ella se puede montar códigos sencillos,es muy accesible y es uno de los mas recomedados principiantes en arduino y programación.
Como vimos cada uno de los componentes y claro el programa de arduino son muy importantes ya que todos estos juntos conforman un solo proyecto, realizando muy bien cada función que hace el elemento y utilizarlo adecuadamente.
6
En este capítulo se hablara de manera más específica como se fue realizando este proyecto, y la manera en como concluyo.
7
CAPITULO 2

Primeramente se tiene que tener en cuenta con el material que es necesario trabajar aparte de los que ya se mencionó en el capítulo 1
Materiales:
Tablilla fenólica: cautin:
Acido férrico:
Taladro:
Tinner:
Plancha:
Para comenzar a realizar este proyecto, se tendría que hacer primero el código el cual nos ayudamos de unos videos, documentos, etc.
El siguiente código es el que utilizaremos para el control del minion-monster.
8

int izq1 = 5; int izq2 = 6; int der1 = 9; int der2 = 10; int veloz = 255; // Velocidad de los motores (0-255)int plasma = 'g'; // inicia detenido
int pecho = 2; // define el pin 2 como (pecho) para el Ultrasonidoint ptrig = 3; // define el pin 3 como (ptrig) para el Ultrasonidoint duracion, distancia; // para Calcular distacia
void setup() { Serial.begin(9600); // inicia el puerto serial para comunicacion con el Bluetooth pinMode(der1, OUTPUT); pinMode(der2, OUTPUT); pinMode(izq1, OUTPUT); pinMode(izq2, OUTPUT); pinMode(pecho, INPUT); // define el pin 2 como entrada (pecho) pinMode(ptrig,OUTPUT); // define el pin 3 como salida (ptrig) pinMode(13,OUTPUT);}
void loop() {
if(Serial.available()>0){ // lee el bluetooth y almacena en estado plasma = Serial.read(); } if(plasma=='a'){ // Boton desplazar al Frente analogWrite(der2, 0); analogWrite(izq2, 0); analogWrite(der1, veloz); analogWrite(izq1, veloz); } if(plasma=='b'){ // Boton IZQ analogWrite(der2, 0); analogWrite(izq2, 0); analogWrite(der1, 0); analogWrite(izq1, veloz); } if(plasma=='c'){ // Boton Parar analogWrite(der2, 0); analogWrite(izq2, 0);
9

analogWrite(der1, 0); analogWrite(izq1, 0); } if(plasma=='d'){ // Boton DER analogWrite(der2, 0); analogWrite(izq2, 0); analogWrite(izq1, 0); analogWrite(der1, veloz); }
if(plasma=='e'){ // Boton Reversa analogWrite(der1, 0); analogWrite(izq1, 0); analogWrite(der2, veloz); analogWrite(izq2, veloz); } if (plasma =='f'){ // Boton ON, se mueve sensando distancia digitalWrite(ptrig, HIGH); // genera el pulso de trigger por 10us delay(0.01); digitalWrite(ptrig, LOW); duracion = pulseIn(pecho, HIGH); // Lee el tiempo del Echo distancia = (duracion/2) / 29; // calcula la distancia en centimetros delay(10); if (distancia <= 15 && distancia >=2){ // si la distancia es menor de 15cm digitalWrite(13,HIGH); // Enciende LED analogWrite(der2, 0); // Parar los motores por 200 mili segundos analogWrite(izq2, 0); analogWrite(der1, 0); analogWrite(izq1, 0); delay (200); analogWrite(der2, veloz); // Reversa durante 500 mili segundos analogWrite(izq2, veloz); delay(500); analogWrite(der2, 0); // Girar durante 1100 milisegundos analogWrite(izq2, 0); analogWrite(der1, 0); analogWrite(izq1, veloz); delay(1100); digitalWrite(13,LOW); }
10

else{ // Si no hay obstaculos se desplaza al frente analogWrite(der2, 0); analogWrite(izq2, 0); analogWrite(der1, veloz); analogWrite(izq1, veloz); } } if(plasma=='g'){ // Boton OFF, detiene los motores no hace nada analogWrite(der2, 0); analogWrite(izq2, 0); analogWrite(der1, 0); analogWrite(izq1, 0); }}
Para empezar la elaboración del proyecto debemos tener todos los materiales listos.
Paso 1: Debemos planchar la pista sobre la tablilla. Debemos hacerlo con mucho cuidado y paciencia para que quede bien traspasada la pista del circuito
11

Paso 2: Bañar la tablilla en acido férrico.Debemos dejar la tablilla adentro del ácido por varios minutos para que la pista quede bien marcada
Paso 3: limpiar la tablilla con tinner.Después de sacar la tablilla del ácido férrico debemos limpiarla con tinner para remover la tinta
Paso 4: Taladrar la tablilla.La pista indica donde debemos perforar en la tablilla para poder colocar los componentes
Paso 5: Colocar y soldar los componentes.Ubicar los componentes en el lugar que van y por consiguiente soldarlos
Paso 6: hacer las conexiones.En este paso, ya que tenemos listos nuestros componentes procederemos a conectarlos hacia el arduino
Paso 7: El armado físico.Pegaremos los servomotores por debajo de la base de nuestro minion-monster, enseguida colocaremos la tablilla y el arduino sobre la base
Paso 8: Transferencia de código.Ya teniendo nuestro código procederemos a transferirlo hacia la placa del arduino
Paso 9: Comprobar su funcionamiento.En este último paso comprobaremos el funcionamiento de nuestro proyecto
Estos fueron los pasos a seguir para la elaboración de nuestro proyecto “minion-monster”
CONCLUSION
Nos sirvió de mucho la realización de este proyecto ya que practicamos varias funciones de la programación como también la elaboración de circuitos en las tablillas fenólicasY asi recordar lo aprendido durante este semestre y parte de los anteriores para asi poder reforzar nuestras abilidades .
12

BIBLIOGRAFIA
-
13

http://articulo.mercadolibre.com.mx/MLM-549385327-sensor-ultrasonico-hc-sr04-para-arduino-pic-raspberry-_JM#eshop_TALOS ELECTRONICS
- http://articulo.mercadolibre.com.mx/MLM-555255557-modulo-bluetooth-rs232-hc-05-para-robotica-pic-arduino-_JM#eshop_TALOS ELECTRONICS
- http://articulo.mercadolibre.com.mx/MLM-549813301-rueda-con-motor-cd-y-motoreductor-arduino-robotica-robot-_JM#eshop_TALOS ELECTRONICS
- http://articulo.mercadolibre.com.mx/MLM-549491905-rueda-loca-de-metal-58-arduino-pic-raspberry-robotica-_JM#eshop_TALOS ELECTRONICS
- http://articulo.mercadolibre.com.mx/MLM-550315566-puente-h-l293d-para-motores-a-pasos-arduino-pic-raspberry-_JM#eshop_TALOS ELECTRONICS
- http://elprofegarcia.com/
- https://www.youtube.com/watch?v=aq-qvWTgMzY
14