imprecise probabilities in engineering design scott ferson applied biomathematics [email protected]...
TRANSCRIPT

Imprecise probabilities in engineering design
Scott FersonApplied Biomathematics
Workshop on Uncertainty Representation in Robust and Reliability-based DesignASME DETC/CIE, Philadelphia, 10 September 2006
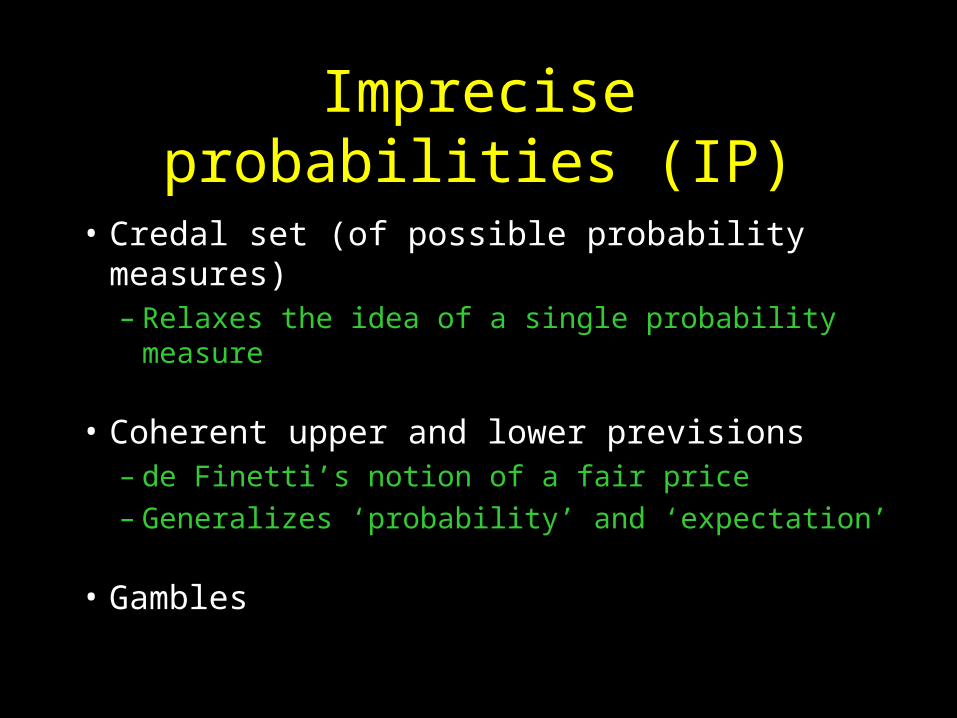
Imprecise probabilities (IP)
• Credal set (of possible probability measures)– Relaxes the idea of a single probability measure
• Coherent upper and lower previsions– de Finetti’s notion of a fair price– Generalizes ‘probability’ and ‘expectation’
• Gambles

Three pillars of IP
• Behavioral definition of probability– Can be operationalized
• Natural extension – Linear programming to compute answers
• Rationality criteria– Avoiding sure losses (Dutch books)– Coherence (logical closure)

Probability of an event
• Imagine a gamble that pays one dollar if an event occurs (but nothing otherwise)– How much would you pay to buy this gamble?– How much would you be willing to sell it for?
• Probability theory requires the same price for both– By asserting the probability of the event, you agree to
buy any such gamble offered for this amount or less, and to sell the same gamble for any amount less than or equal to this ‘fair’ price …and for every event!
• IP just says, sometimes, your highest buying price might be smaller than your lowest selling price

Credal set
• Knowledge and judgments are used to define a set of possible probability measures M
– All distributions within bounds are possible– Only distributions having a given shape
– Probability of an event is within some interval– Event A is at least as probable as event B– Nothing is known about the probability of C

IP generalizes other approaches
• Probability theory• Bayesian analysis• Worst-case analysis, info-gap theory• Possibility / necessity models• Dempster-Shafer theory, belief / plausibility functions• Probability intervals, probability bounds analysis• Lower/upper mass/density functions• Robust Bayes, Bayesian sensitivity analysis• Random set models• Coherent lower previsions
DeFinetti probability measuresCredal setsDistributions with interval-valued parametersContamination modelsChoquet capacities, 2-monotone capacities

Assumptions
• Everyone makes assumptions
• But not all sets of assumptions are equal!Linear Gaussian Independent
Montonic Unimodal Known correlation sign
Any function Any distribution Any dependence
• IP doesn’t require unwarranted assumptions– “Certainties lead to doubt; doubts lead to certainty”

Activities in engineering design
• Decision making• Optimization• Constraint propagation
• Convolutions– Arithmetic– Logic (event trees)
• Updating• Validation• Sensitivity analyses
…sometimes
…often
…a lot

Convolutions
(i.e., adding, multiplying, and-gating, or-gating, etc., for
quantifying the reliability or risk associated with a design)
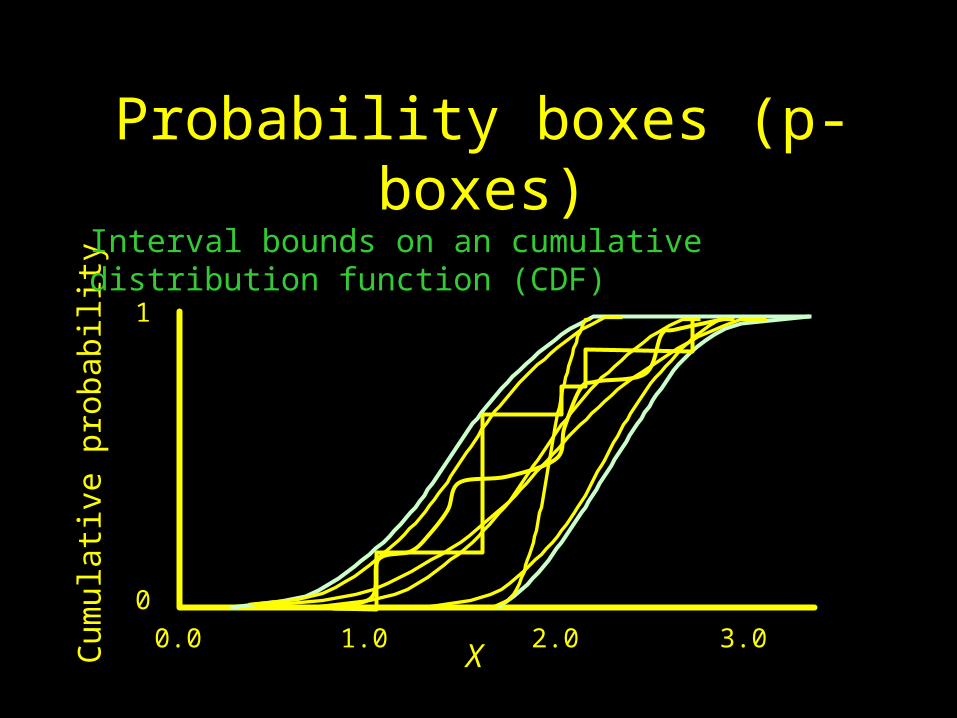
Probability boxes (p-boxes)
0
1
1.0 2.0 3.0 0.0X
Cum
ulat
ive
prob
abil
ity
Interval bounds on an cumulative distribution function (CDF)

A few ways p-boxes ariseC
DF
1
0
min max
Interval
min maxmean
Non-parametric (unknown shape)
Cumulative histogram of interval data Envelope of alternative distributions
Known shape with interval parameters
Precise distribution

P-box arithmetic (and logic)
• All standard mathematical operations– Arithmetic operations (+, , ×, ÷, ^, min, max)– Logical operations (and, or, not, if, etc.)– Transformations (exp, ln, sin, tan, abs, sqrt, etc.)– Other operations (envelope, mixture, etc.)
• Faster than Monte Carlo• Guaranteed to bounds answer• Optimal answers generally require LP
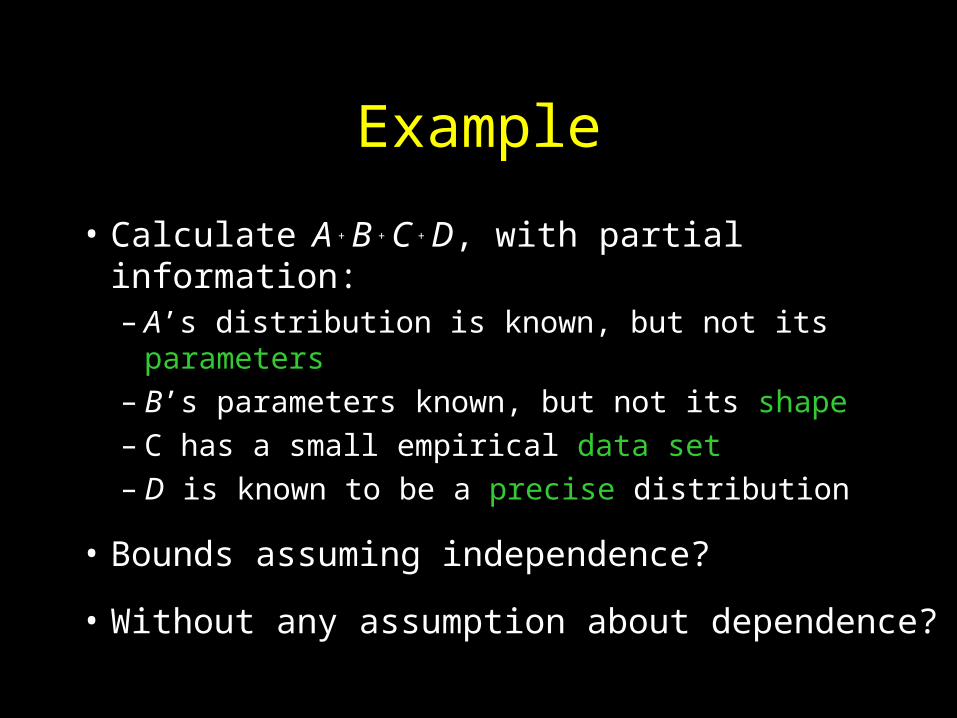
Example
• Calculate A + B + C + D, with partial information:– A’s distribution is known, but not its parameters – B’s parameters known, but not its shape– C has a small empirical data set– D is known to be a precise distribution
• Bounds assuming independence?
• Without any assumption about dependence?

A = {lognormal, mean = [.5,.6], variance = [.001,.01])B = {min = 0, max = 0.5, mode = 0.3}C = {sample data = 0.2, 0.5, 0.6, 0.7, 0.75, 0.8}D = uniform(0, 1)
A
0 0.2 0.4 0.60
1
B
0 10
1
D
0 10
1
C
CD
FC
DF
0 10
1
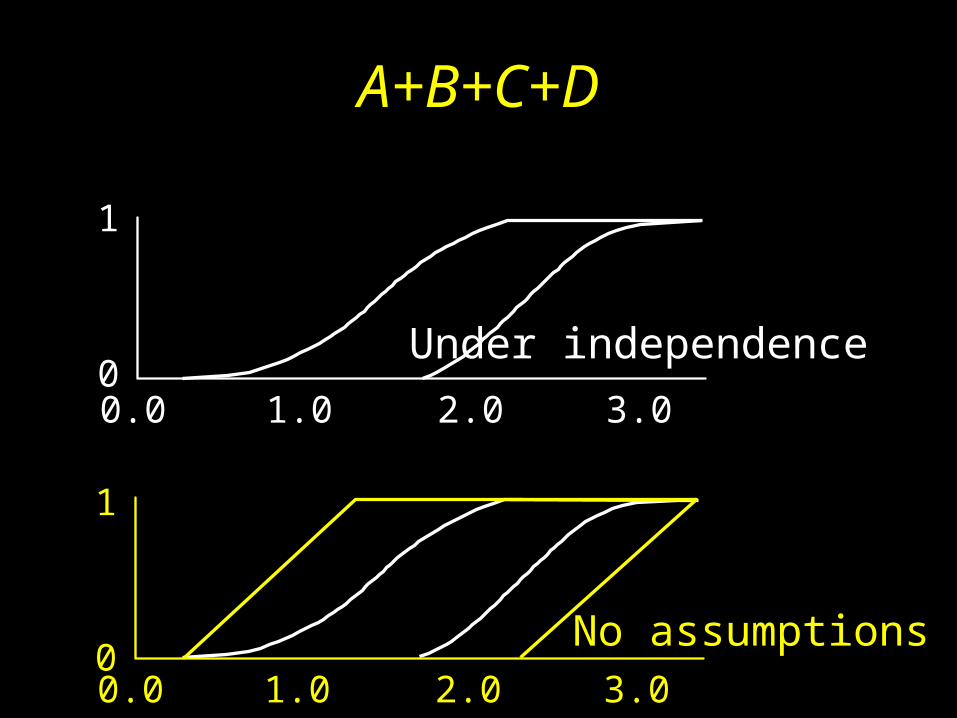
A+B+C+D
No assumptions 1.0 2.0 3.0 0.0
0
1
Under independence 0
1
1.0 2.0 3.0 0.0

Generalization of methods• Marries interval analysis with probability theory
– When information abundant, same as probability theory
– When inputs only ranges, agrees with interval analysis
• Can’t get these answers from Monte Carlo methods
• Fewer assumptions– Not just different assumptions
– Distribution-free methods
• Rigorous results– Automatically verified calculations
– Built-in quality assurance
Can uncertainty swamp the answer?
• Sure, if uncertainty is huge
• This should happen (it’s not “unhelpful”)
• If you think the bounds are too wide, then put in whatever information is missing
• If there isn’t any such information, do you want the results to mislead?

Decision making

Knight’s dichotomy
• Decisions under risk– The probabilities of various outcomes are known– Maximize expected utility– Not good for big unique decisions or when gambler’s ruin is possible
• Decisions under uncertainty– Probabilities of the outcomes are unknown– Several strategies, depending on the analyst
Decisions under uncertainty
• Pareto (some strategy dominates in all scenarios)• Maximin (largest minimum payoff)• Maximax (largest maximum payoff)• Hurwicz (largest average of min and max payoffs)• Minimax regret (smallest of maximum regret)• Bayes-Laplace (maximum expected payoff
assuming scenarios are equiprobable)
Decision making in IP
• State of the world is a random variable, X X• Outcome (reward) of an action depends on X
• We identify an action a with its reward fa : X R
• In principle, we’d like to choose the decision with the largest expected reward, but how do we do this?
• We explore how the decision changes for different probability measures in M, the set of possible ones

Comparing actions a and b
Strictly preferred a > b Ep( fa) > Ep( fb) for all p M
Almost preferred a b Ep( fa) Ep( fb) for all p M
Indifferent a b Ep( fa) = Ep( fb) for all p M
Incomparable a || b Ep( fa) < Ep( fb) and
Eq( fa) > Eq( fb) some p,q M
where Ep( f ) = p(x) f (x), and
M is the set of possible probability distributions
x X

E-admissibility
• Vary p in M and, assuming it is the correct probability measure, see which decision emerges as the one that maximizes expected utility
• The result is the set of all such decisions for all p M
Alternative: maximality
• Maximal decisions are undominated for some p
Ep( fa) Ep( fb), for some action b, for some p M
• Actions cannot be linearly ordered, but only partially ordered
•
• •
•
•
•
•
•
•
•
•
•
•
Another alternative: -maximin
• We could take the decision that maximizes the worst-case expected reward
• Essentially a worst-case optimization
• Generalizes two criteria from traditional theory– Maximize expected utility– Maximin

Several IP decision criteria
-maximax
E-admissiblemaximal
-maximin
interval dominance

Example
• Suppose we are betting on a coin toss– Only know probability of heads [0.28, 0.7]– Want to decide among six available gambles
1: Pays 4 for heads, pays 0 for tails2: Pays 0 for heads, pays 4 for tails3: Pays 3 for heads, pays 2 for tails4: Pays ½ for heads, pays 3 for tails5: Pays 2.35 for heads, pays 2.35 for tails6: Pays 4.1 for heads, pays 0.3 for tails
(due to Troffaes 2004)

E-admissibility
M is a one-dimensional space of probability measures
Probability Preference
p(H) < 2/5 2
p(H) = 2/5 2, 3 (indifferent)2/5 < p(H) < 2/3 32/5 < p(H) < 2/3 1, 3 (indifferent)2/3 < p(H) 1
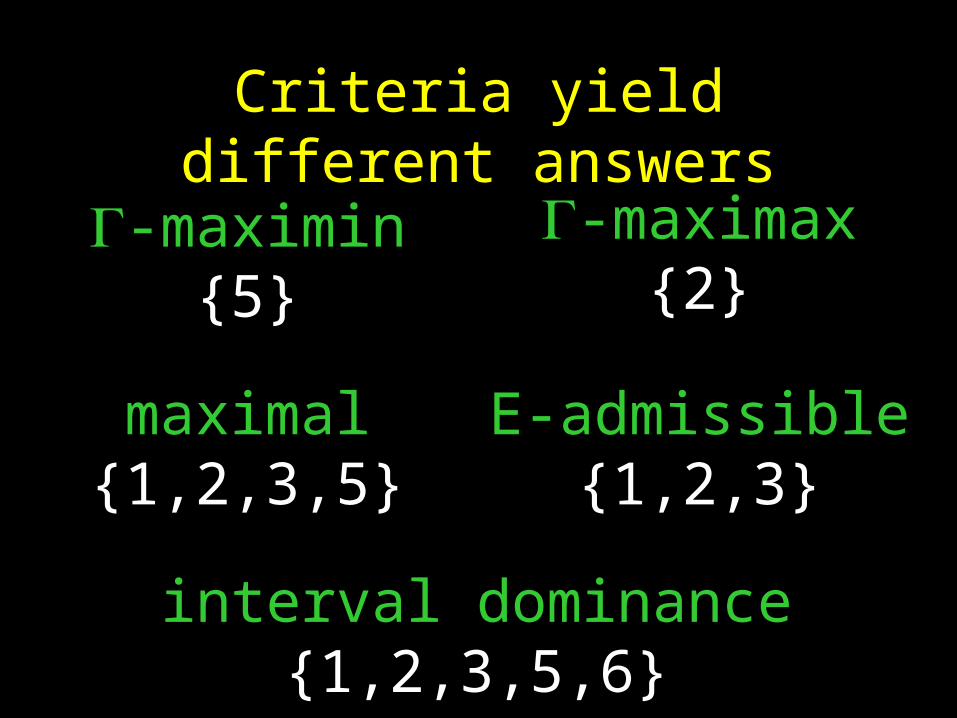
Criteria yield different answers
-maximax{2}
E-admissible{1,2,3}
maximal{1,2,3,5}
-maximin{5}
interval dominance{1,2,3,5,6}

So many answers
• Topic of current discussion and research
• Different criteria are useful in different settings
• The more precise the input, the tighter the outputs
criteria usually yield only one decision
criteria not good if many sequential decisions
• Some argue that E-admissibility is best overall
• Maximality is close to E-admissibility, but much easier to compute, especially for large problems

IP versus traditional approaches
• Decisions under IP allow indecision when your uncertainty entails it
• Bayes always produces a single decision (up to indifference), no matter how little information may be available
• IP unifies the two poles of Knight’s division into a continuum

Comparison to Bayesian approach
• Axioms identical except IP doesn’t use completeness
• Bayesian rationality implies not only avoidance of sure loss & coherence, but also the idea that an agent must agree to buy or sell any bet at one price
• “Uncertainty of probability” is meaningful, and it’s operationalized as the difference between the max buying price and min selling price
• If you know all the probabilities (and utilities) perfectly, then IP reduces to Bayes

Why Bayes fares poorly
• Bayesian approaches don’t distinguish ignorance from equiprobability
• Neuroimaging and clinical psychology shows humans strongly distinguish uncertainty from risk– Most humans regularly and strongly deviate from Bayes– Hsu (2005) reported that people who have brain lesions
associated with the site believed to handle uncertainty behave according to the Bayesian normative rules
• Bayesians are too sure of themselves (e.g., Clippy)

Robust Bayes

Derivation of Bayes’ rule
P(A | B) P(B) = P(A & B) = P(B | A) P(A)
P(A | B) = P(A) P(B | A) / P(B)
The prevalence of a disease in the general population is 0.01%. If a diseased person is tested, there’s a 99.9% chance the test is positive. If a healthy person is tested, there’s a 99.99% chance the test is negative.If you test positive, what’s the chance you have the disease?
A
B
A&B
Almost all doctors say 99% or greater, but the true answer is 50%.
-5 0 5 10 15 20-5 0 5 10 15 20
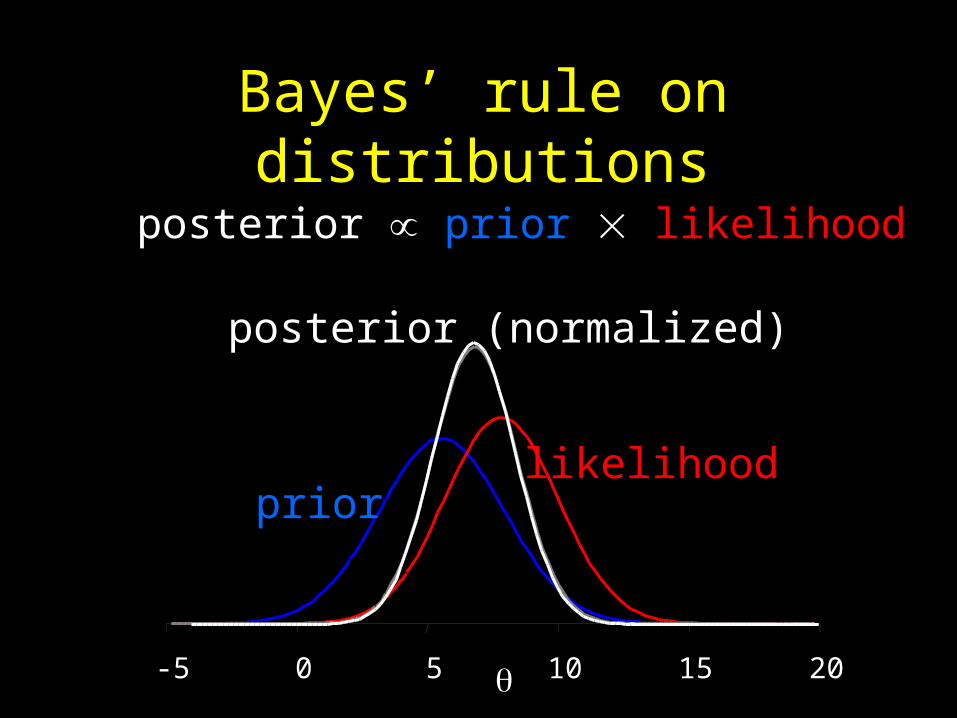
Bayes’ rule on distributions
posterior prior likelihood
-5 0 5 10 15 20
likelihood
posterior (normalized)
prior

Two main problems
• Subjectivity required– Beliefs needed for priors may be inconsistent
with public policy/decision making
• Inadequate model of ignorance– Doesn’t distinguish between ignorance and
equiprobability
Solution: study robustness
• Answer is robust if it doesn’t depend sensitively on the assumptions and inputs
• Robust Bayes analysis, also called Bayesian sensitivity analysis, investigates this
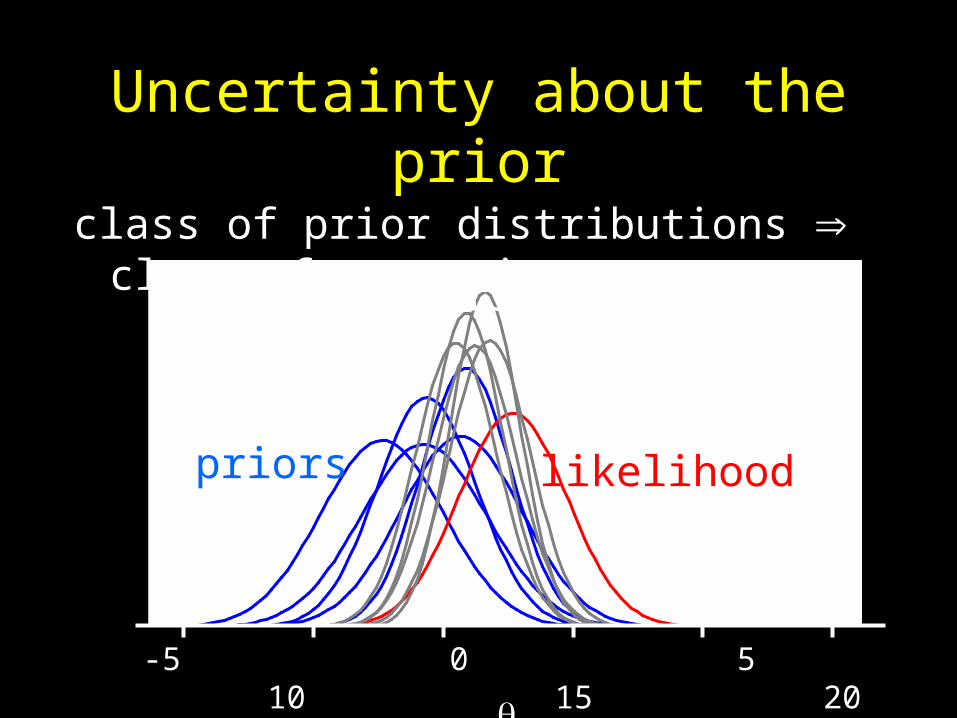
Uncertainty about the prior
class of prior distributions class of posteriors
-5 0 5 10 15 20-5 0 5 10 15 20-5 0 5 10 15 20
likelihood
posteriors
priors
-5 0 5 10 15 20

Uncertainty about the likelihood
-5 0 5 10 15 20-5 0 5 10 15 20-5 0 5 10 15 20
likelihoods
posteriors
prior
class of likelihood functions class of posteriors
-5 0 5 10 15 20

-5 0 5 10 15 20-5 0 5 10 15 20
Uncertainty about both
-5 0 5 10 15 20
Likelihoods
Posteriors
Priors
-5 0 5 10 15 20
Uncertainty about decisions
class of probability models class of decisions
class of utility functions class of decisions
If you end up with a single decision, great.
If the class of decisions is large and diverse, then any conclusion should be rather tentative.
Bayesian dogma of ideal precision
• Robust Bayes is inconsistent with the Bayesian idea that uncertainty should be measured by a single additive probability measure and values should always be measured by a precise utility function.
• Some Bayesians justify it as a convenience
• Others suggest it accounts for uncertainty beyond probability theory

Sensitivity analysis

Sensitivity analysis with p-boxes
• Local sensitivity via derivatives
• Explored macroscopically over the uncertainty in the input
• Describes the ensemble of tangent slopes to the function over the range of uncertainty
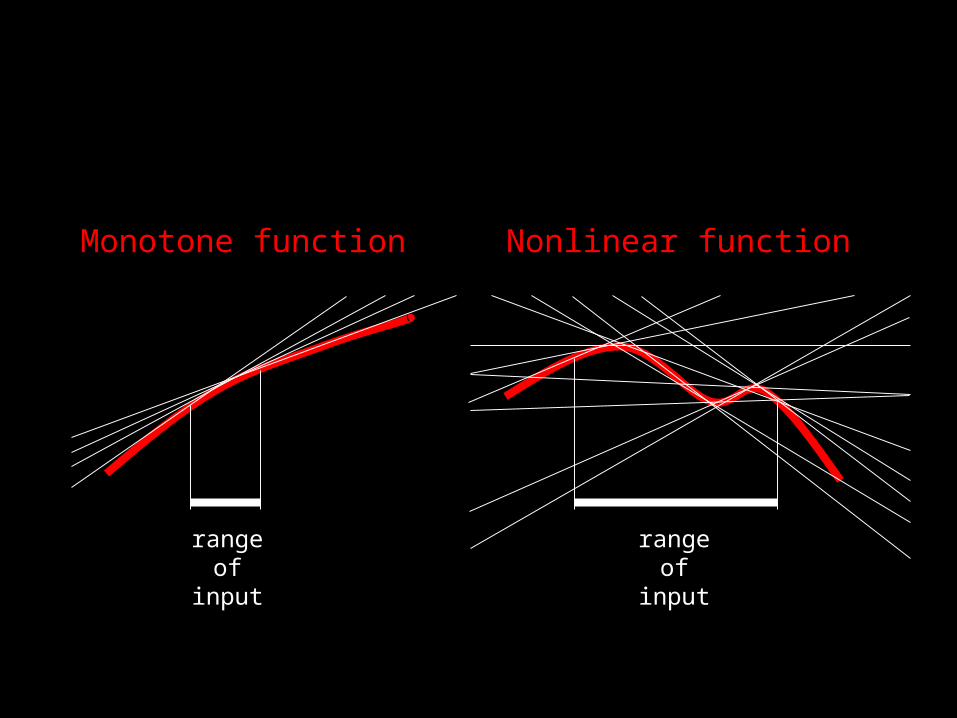
range of input
range of input
Monotone function Nonlinear function

Sensitivity analysis of p-boxes
• Quantifies the reduction in uncertainty of a result when an input is pinched
• Pinching is hypothetically replacing it by a less uncertain characterization

Pinching to a point value
0
1
1 2 30 X
Cum
ulat
ive
prob
abil
ity
0
1
1 2 30 XC
umul
ativ
e pr
obab
ilit
y

Pinching to a (precise) distribution
0
1
1 2 30 X
Cum
ulat
ive
prob
abil
ity
0
1
1 2 30 XC
umul
ativ
e pr
obab
ilit
y
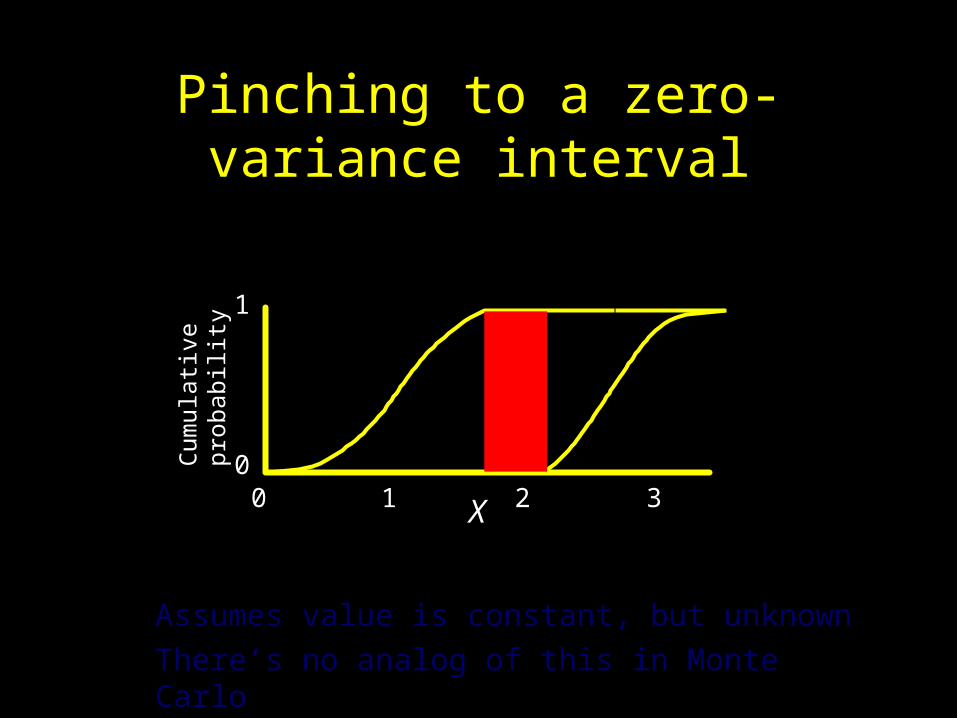
Pinching to a zero-variance interval
Assumes value is constant, but unknown
There’s no analog of this in Monte Carlo
0
1
1 2 30 X
Cum
ulat
ive
prob
abil
ity

Using sensitivity analyses
There is only one take-home message:
“Shortlisting” variables for treatment is bad– Reduces dimensionality, but erases uncertainty

Validation

200
250
300
350
400
1000900800700600
Time [seconds]
Tem
pera
ture
[de
gree
s C
elsi
us]
How the data come

How we look at them
0
1
Pro
babi
lity
200 250 300 350 450400Temperature

0
1
Pro
babi
lity
200 250 300 350 450400Temperature
One suggestion for a metric
Area or average horizontal distance between the empirical distribution Sn and the predicted distribution
Pooling data comparisons
• When data are to be compared against a single distribution, they’re pooled into Sn
• When data are compared against different distributions, this isn’t possible
• Conformance must be expressed on some universal scale

Universal scale
ui=Fi (xi) where xi are the data and Fi are their
respective predictions
1 10 100 10000
1
0 1 2 3 40
1
0 100
1
u1
u2
u3
5
Pro
babi
lity

Pro
babi
lity
Backtransforming to physical scale
u
0 50
1
1 32 4
Pro
babi
lity G
Backtransforming to physical scale
• The distribution of G1(Fi (xi)) represents the
empirical data (like Sn does) but in a common, transformed scale
• Could pick any of many scales, and each leads to a different value for the metric
• The likely distribution of interest is the one used for the validation statement

Epistemic uncertainty in predictions
• In left, the datum evidences no discrepancy at all• In middle, the discrepancy is relative to the edge• In right, the discrepancy is even smaller
Pro
babi
lity
0 10 200
1
0 10 200
1
0 10 200
1
a = N([5,11],1)show a
b = 8.1show b in blue
b = 15
breadth(env(rightside(a),b)) 4.023263478773
b = 11breadth(env(rightside(a),b)) / 2 0.4087173895951 d = 0 d 4 d 0.4

Epistemic uncertainty in bothP
roba
bili
ty
0 5 100
1
0 5 100
1
0 5 100
1
z=0.0001; zz =9.999show z,zza = N([6,7],1)-1show a
b = -1+mix(1,[5,7], 1,[6.5,8], 1,[7.6,9.99], 1, [3.3,6], 1,[4,8], 1,[4.5,8], 1,[5,7], 1,[7.5,9], 1,[4,8], 1,[5,9], 1,[6,9.99])show b in blue
b = -0.2+mix(1, [9,9.6],1, [5.3,6.2], 1,[5.6,6], 1,[7.8,8.4], 1,[5.9,7.8], 1,[8.3,8.7], 1,[5,7], 1,[7.5,8], 1,[7.6,9.99], 1, [3.3,6], 1,[4,8], 1,[4.5,8], 1,[5,7], 1,[8.5,9], 1,[7,8], 1,[7,9], 1,[8,9.99])
breadth(env(rightside(a),b)) 2.137345705795
c = -4b = -0.2+mix(1, [9,9.6],1, [5.3,6.2]+c, 1,[5.6,6]+c, 1,[7.8,8.4], 1,[5.9,7.8], 1,[8.3,8.7], 1,[5,7], 1,[7.5,8], 1,[7.6,9.99], 1, [3.3,6], 1,[4,8], 1,[4.5,8]+c, 1,[5,7]+c, 1,[8.5,9], 1,[7,8], 1,[7,9], 1,[8,9.99])
breadth(env(rightside(a),b)) / 2 1.329372857714
d = 0 d 0.05 d 0.07
Predictions in whiteObservations in blue
Backcalculation
A typical problem
• How can we design an shielding system if we can’t well specify the radiation distribution?
• Could plan for worst case analysis– Often wasteful– Can’t account for rare even worse extremes
• Could pretend we know the distribution– Unreasonable for new designs or environments

IP solution
• Natural compromise that can express both– Gross uncertainty like intervals and worst cases– Distributional information about tail risks
• Need to solve equations containing uncertain numbers– Constraint propagation, or backcalculation

Can’t just invert the equation
Total ionizing dose = Radiation / Shielding
Shielding = Radiation / Dose
When Shielding is put back into the forward equation, the resulting dose is wider than planned
constraints prescribed unknown known
How come?• Suppose dose should be less than 32, and
radiation ranges between 50 and 200
• If we solved for shielding by division, we’d get a distribution ranging between <<>>
• But if we put that answer back into the equation
Dose = Radiation / Shielding
we’d get a distribution with values as large as 128, which is four times larger than planned
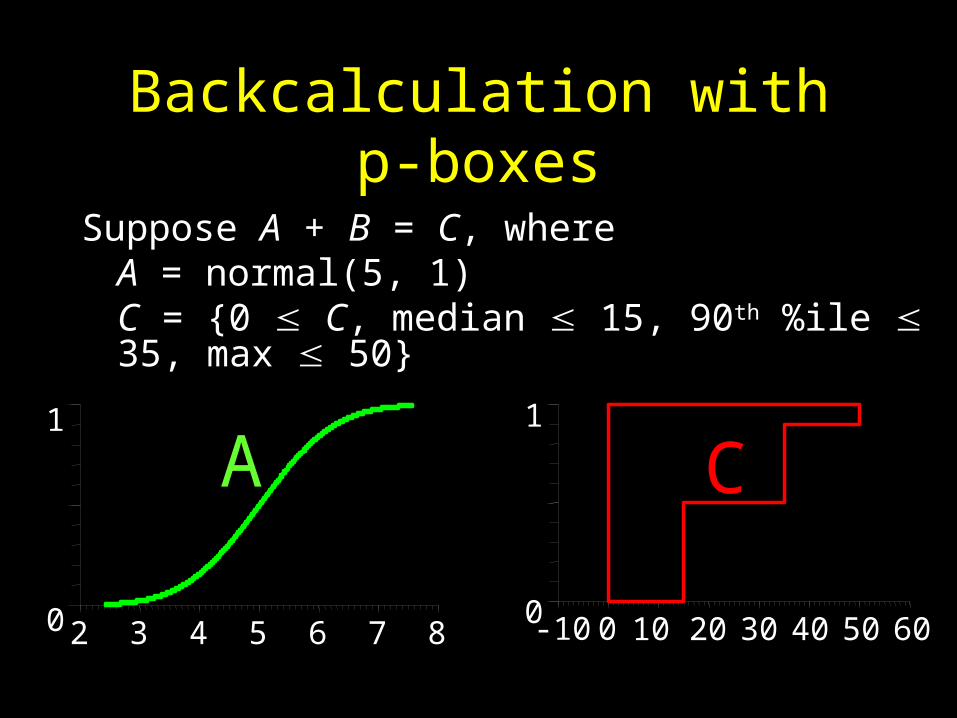
Backcalculation with p-boxes
Suppose A + B = C, where A = normal(5, 1)C = {0 C, median 15, 90th %ile 35, max 50}
2 3 4 5 6 7 80
1
A
-10 0 10 20 30 40 50 600
1
C

Getting the answer
• The backcalculation algorithm basically reverses the forward convolution
• Not hard at all…but a little messy to show
• Any distribution totally inside B is sure to satisfy the constraint … it’s a “kernel”
-10 0 10 20 30 40 500
1
B
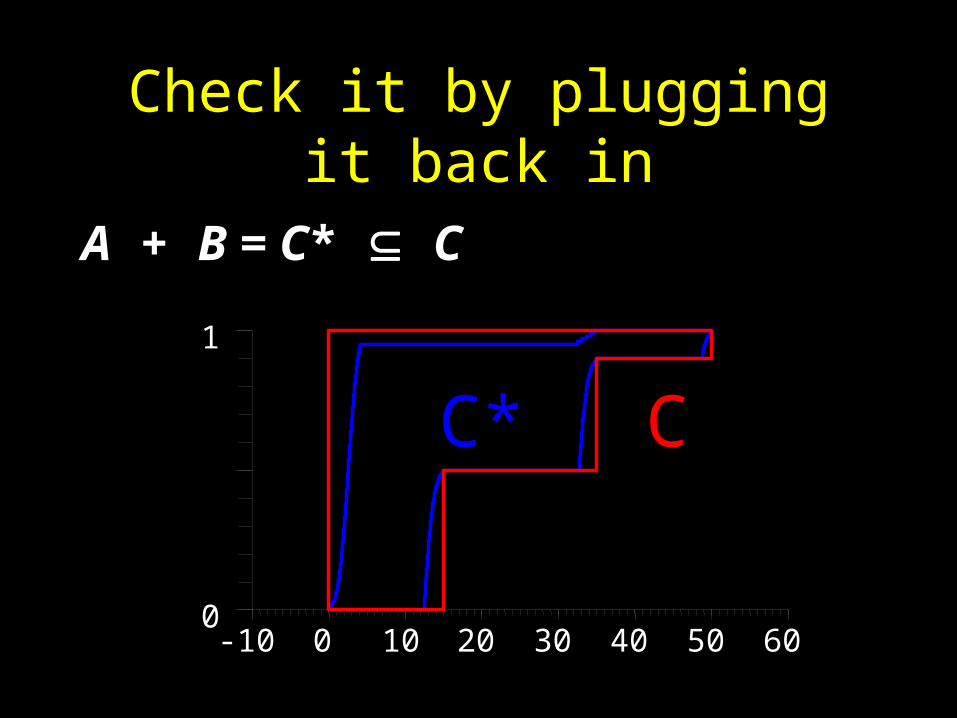
Check it by plugging it back in
A + B = C* C
-10 0 10 20 30 40 50 600
1
C* C
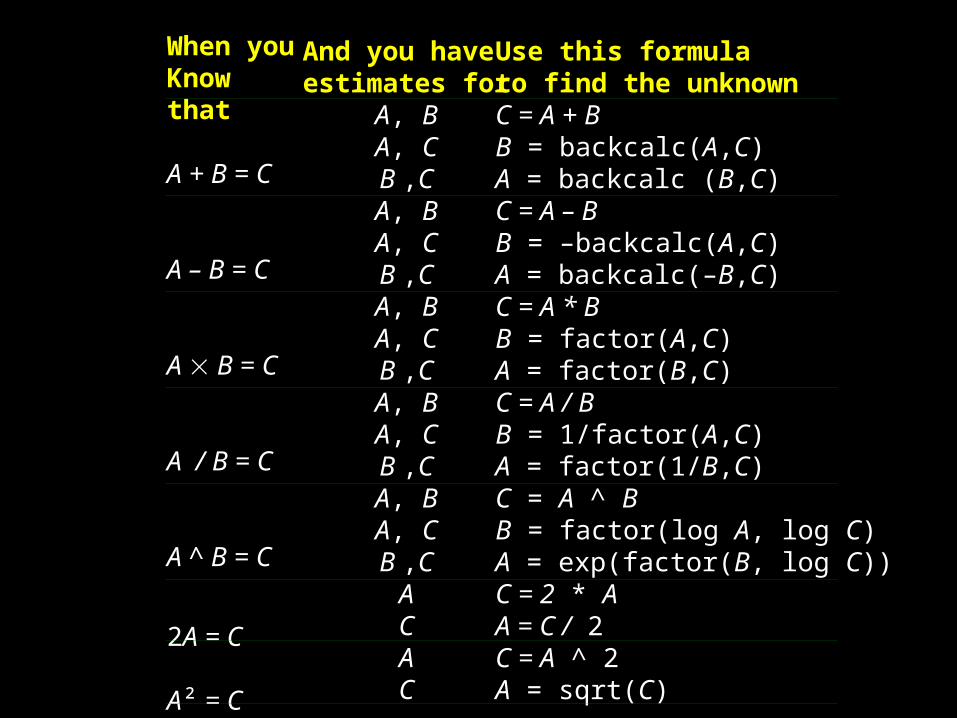
When you Know that
A + B = C
A – B = C
A B = C
A / B = C
A ^ B = C
2A = C
A² = C
And you have estimates for
A, BA, CB ,CA, BA, CB ,CA, BA, CB ,CA, BA, CB ,CA, BA, CB ,C
ACAC
Use this formulato find the unknownC = A + BB = backcalc(A,C)A = backcalc (B,C)C = A – BB = –backcalc(A,C)A = backcalc(–B,C)C = A * BB = factor(A,C)A = factor(B,C)C = A / BB = 1/factor(A,C)A = factor(1/B,C)C = A ^ BB = factor(log A, log C)A = exp(factor(B, log C))C = 2 * AA = C / 2C = A ^ 2A = sqrt(C)
Hard with probability distributions
• Inverting the equation doesn’t work
• Available analytical algorithms are unstable for almost all problems
• Except in a few special cases, Monte Carlo simulation cannot compute backcalculations; trial and error methods are required

Precise distributions don’t work
• Precise distributions can’t express the target
• A specification for shielding giving a prescribed distribution of doses seems to say we want some doses to be high
• Any distribution to the left would be better
• A p-box on the dose target expresses this idea
Conclusions
New organization
• In the past, focus on where uncertainty arose– Parameters– Drivers– Model structure
• Today, focus is on the nature of uncertainty– Ignorance (epistemic uncertainty)– Variability (aleatory uncertainty)– Vagueness (semantic uncertainty, fuzziness)– Confusion, mistakes

Untenable assumptions
• Uncertainties are small
• Sources of variation are independent
• Uncertainties cancel each other out
• Linearized models good enough
• Underlying physics is known and modeled
• Computations are inexpensive to make

Need ways to relax assumptions
• Possibly large uncertainties
• Non-independent, or unknown dependencies
• Uncertainties that may not cancel
• Arbitrary mathematical operations
• Model uncertainty

Wishfulthinking
Prudent analysis
Failure
Success
Dumb luck
Negligence Honorable failure
Good engineering
Take-home messages
• It seems antiscientific (or at least silly) to say you know more than you do
• Bayesian decision making always yields one answer, even if this is not really tenable
• IP tells you when you need to be careful and reserve judgment
References
• Cosmides, L., and J. Tooby. 1996. Are humans good intuitive statisticians after All? Rethinking some conclusions from the literature on judgment under uncertainty. Cognition 58:1-73.
• Hsu, M., M. Bhatt, R. Adolphs, D. Tranel, and C.F. Camerer. 2005. Neural systems responding to degrees of uncertainty in human decision-making. Science 310:1680-1683.
• Kmietowicz, Z.W. and A.D. Pearman. 1981. Decision Theory and Incomplete Knowledge. Gower, Hampshire, England.
• Knight, F.H. 1921. Risk, Uncertainty and Profit. L.S.E., London.
• Troffaes, M. 2004. Decision making with imprecise probabilities: a short review. The SIPTA Newsletter 2(1): 4-7.
• Walley, P. 1991. Statistical Reasoning with Imprecise Probabilities. Chapman and Hall, London.
http://www.sciencemag.org/cgi/content/short/310/5754/1680
http://www.sciencedirect.com/science?_ob=ArticleURL&_udi=B6T24-3VXBPWR-1&_user=10&_handle=V-WA-A-W-V-MsSWYWW-UUA-U-AABDWWZUBV-AABVYUZYBV-CVUEBVVZZ-V-U&_fmt=summary&_coverDate=01%2F31%2F1996&_rdoc=1&_orig=browse&_srch=%23toc%234908%231996%23999419998%2370272%21&_cdi=4908&view=c&_acct=C000050221&_version=1&_urlVersion=0&_userid=10&md5=c6985daf53c5402c195c1106cec9622f

Web-accessible reading
http://maths.dur.ac.uk/~dma31jm/durham-intro.pdf(Gert de Cooman’s gentle introduction to imprecise probabilities)
http://www.cs.cmu.edu/~qbayes/Tutorial/quasi-bayesian.html(Fabio’s Cozman’s introduction to imprecise probabilities)
http://idsia.ch/~zaffalon/events/school2004/school.htm(summer school on imprecise probabilities)
http://www.sandia.gov/epistemic/Reports/SAND2002-4015.pdf(introduction to p-boxes and related structures)
http://www.ramas.com/depend.zip(handling dependencies in uncertainty modeling)
http://www.ramas.com/bayes.pdf(introduction to Bayesian and robust Bayesian methods in risk analysis)
http://www.ramas.com/intstats.pdf(statistics for data that may contain interval uncertainty)

End
