implementasi keseimbangan pada sistem ball and …digilib.unila.ac.id/54874/3/skripsi full teks...
TRANSCRIPT
1
IMPLEMENTASI KESEIMBANGAN PADA SISTEM BALL AND BEAM
MENGGUNAKAN KENDALI FUZZY LOGIC
(Skripsi)
Oleh
ABIYYU MUHAMMAD AFIF
FAKULTAS TEKNIK
UNIVERSITAS LAMPUNG
BANDARLAMPUNG
2018
1
ABSTRACT
IMPLEMENTATION OF BALANCE BALL AND BEAM SYSTEM USING
FUZZY LOGIC CONTROL
By
ABIYYU MUHAMMAD AFIF
An object depends on another object when a balanced position can be used as a
point in implementing and resolving control system problems. Unstable control
systems can be researched to obtain the conclusions in the form of system
responses. The balance in the ball and beam system can be used as a simple
application to study the control system. The research was conducted with fuzzy
logic controls to improve the system response from the ball and beam and to make
the balance system for ball and beam become better. Fuzzy logic control was
implemented by using Arduino Atmega 2560. Control parameters are carried out
using two inputs, namely position and set point. Mapping the rule “if then else”
applied to the Min-Max strategy from Mamdani to control. Centroid Of Area
(COA) method was applied in the process of defuzification and the output was
used to drive the servo motor. Testing was done by comparing the control
systems, namely ON/OFF control, PD control, and fuzzy logic control. Data
retrieval was done by looking at the response system to the ball position. From the
overall test results, it could be seen that the fuzzy logic control can control the ball
and beam balance system well from minimizing steady state for 2 seconds,
accelerating rise time for 1 seconds and maintaining the steady state error, which
was better than PD control and ON/OFF control.
Keywords : Ball and Beam System, Mamdani, Centroid Of Area (COA), Fuzzy
Logic Control, Arduino Atmega 2560
1
ABSTRAK
IMPLEMENTASI KESEIMBANGAN PADA SISTEM BALL AND BEAM
MENGGUNAKAN KENDALI FUZZY LOGIC
Oleh
ABIYYU MUHAMMAD AFIF
Suatu objek bergantung terhadap objek lain ketika posisi setimbang dapat
dijadikan suatu acuan dalam menerapkan dan menyelesaikan permasalahan sistem
kendali. Permasalahan keseimbangan yang tidak stabil dapat dijadikan penelitian
agar memperoleh kesimpulan berupa respon sistem. Keseimbangan pada sistem
ball and beam dapat dijadikan pengaplikasian sederhana untuk mempelajari
sistem kendali. Penelitian dilakukan dengan kendali fuzzy logic agar memperbaiki
respon sistem dari sistem keseimbangan ball and beam menjadi lebih baik.
Kendali fuzzy logic diimplementasikan menggunakan Arduino Atmega 2560.
Parameter pengendalian dilakukan dengan menggunakan dua masukan yaitu
position dan set point. Pemetaan rule if then else yang diterapkan pada strategi
Min-Max dari Mamdani untuk pengendalian. Proses defuzzifikasi yang diterapkan
adalah metode Centroid Of Area (COA) serta keluarannya digunakan untuk
menggerakan motor servo. Pengujian dilakukan dengan membandingkan antar
sistem kendali yaitu kendali ON/OFF, kendali PD, dan kendali fuzzy logic.
Pengambilan data dilakukan dengan cara melihat respon sistem terhadap posisi
bola yang diinginkan. Dari keseluruhan hasil pengujian, terlihat bahwa kendali
fuzzy logic dapat mengendalikan sistem keseimbangan ball and beam dengan baik
dari memperkecil waktu tunak selama 2 sec, mempercepat rise time selama 1 sec
dan menjaga tidak terjadi error steady state dibandingkan terhadap kendali PD
dan kendali ON/OFF.
Kata kunci : Sistem Ball and Beam, Mamdani, Centroid Of Area (COA), Kendali
Fuzzy Logic, Arduino Atmega 2560

1
IMPLEMENTASI KESEIMBANGAN PADA SISTEM BALL AND BEAM
MENGGUNAKAN KENDALI FUZZY LOGIC
Oleh
ABIYYU MUHAMMAD AFIF
Skripsi
Sebagai Salah Satu Syarat Untuk Memperoleh Gelar
SARJANA TEKNIK
Pada
Jurusan Teknik Elektro
Fakultas Teknik Universitas Lampung
FAKULTAS TEKNIK
UNIVERSITAS LAMPUNG
BANDAR LAMPUNG
2018
1
Judul Skripsi : IMPLEMENTASI KESEIMBANGAN
PADA SISTEM BALL AND BEAM
MENGGUNAKAN KENDALI FUZZY
LOGIC
Nama Mahasiswa : Abiyyu Muhammad Afif
Nomor Pokok Mahasiswa : 1415031003
Jurusan : Teknik Elektro
Fakultas : Teknik
MENYETUJUI
1. Komisi Pembimbing
Emir Nasrullah, S.T., M.Eng. Sumadi, S.T., M.T.
NIP 196006141994021001 NIP 197311042000031001
2. Ketua Jurusan Teknik Elektro
Dr. Ing. Ardian Ulvan, S.T., M.Sc.
NIP 197311281999031005
1
MENGESAHKAN
1. Tim Penguji
Ketua : Emir Nasrullah, S.T., M.Eng .…………….
Sekretaris : Sumadi, S.T., M.T. .…………….
Penguji : Agus Trisanto, Ph. D …………….
2. Dekan Fakultas Teknik
Prof. Dr. Suharno, M.Sc., Ph.D.
NIP 196207171987031002
Tanggal Lulus Ujian Skripsi : 13 November 2018
1
SURAT PERNYATAAN
Dengan ini saya menyatakan bahwa dalam skripsi ini tidak terdapat karya yang
pernah dilakukan orang lain dan sepanjang sepengetahuan saya tidak terdapat
karya atau pendapat yang ditulis atau diterbitkan orang lain, kecuali secara tertulis
diacu dalam naskah sebagaimana telah disebutkan dalam daftar pustaka. Selain
dari itu saya menyatakan bahwa skripsi ini saya buat sendiri. Apabila pernyataan
saya tidak benar maka, saya bersedia terkena sanksi sesuai dengan hukum yang
berlaku.
Bandar Lampung, 18 November 2018
Abiyyu Muhammad Afif
NPM. 1415031003
1
RIWAYAT HIDUP
Penulis dilahirkan di Bandarlampung pada tanggal 10 Juni 1996,
anak dari Bapak Drs. Helpi dan Ibu Susriyetti, anak pertama dari
2 bersaudara. Penulis pertama kali memulai jenjang pendidikan
di TK Aisyah Kelapa Tiga, Tanjung Karang Pusat,
Bandarlampung pada tahun 2000−2002. Pendidikan kedua dilanjutkan di SD
Kartika II−5 Bandarlampung pada tahun 2002−2008. Pendidikan ketiga
dilanjutkan di SMP Negeri 25 Bandarlampung pada tahun 2008−2011. Pada tahap
ini penulis memiliki riwayat prestasi akademik yaitu pernah mengikuti olimpiade
Ilmu Pengetahuan Alam (IPA) tingkat SMP se−Bandarlampung dan prestasi non
akademik yaitu menjuarai kejuaraan olahraga basket di berbagai kompetisi.
Pendidikan keempat dilanjutkan di SMA YP UNILA Bandarlampung pada tahun
2011−2014. Dijenjang pendidikan ini penulis mulai aktif berorganisasi seperti
PASKIBRA dan juga kegiatan ekstrakulikuler lainnya seperti basket. Pada tahun
2014 penulis memulai jenjang pendidikan yang kelima di Universitas Lampung
melalui jalur berprestasi yang disebut jalur Seleksi Nasional Masuk Perguruan
Negeri (SNMPTN). Penulis terdaftar sebagai mahasiswa Jurusan Teknik Elektro
Universitas Lampung. Penulis pernah melakukan kerja praktik (magang) selama
bulan Agustus 2017 di Instansi Lembaga Ilmu Pengetahuan Indonesia (LIPI).
1
DENGAN KERENDAHAN HATI YANG TULUS
KUPERSEMBAHAKAN KARYA SEDERHANA INI
KEPADA
Ayah dan Ibu tercinta Drs. Helpi dan Susriyetti
yang telah membesarkan saya dengan penuh cinta
kebahagiaan dan penuh doa disetiap langkah
kesuksesan anak-anaknya.
Taklupa kepada saudaraku tersayang Zakki Dwi
Naufal yang selalu memberi keceriaan disetiap
saat.
Terima kasih atas semua doa dan dukungannya
serta semangat dari berbagai pihak yang diberikan
untukku sampai bisa mencapai tahap ini.
1
MOTTO HIDUP
Maka sesungguhnya bersama kesulitan ada kemudahan.
Sesungguhnya bersama kesulitan ada kemudahan. Maka
apabila engkau telah selesai (dari sesuatu urusan), tetaplah
bekerja keras (untuk urusan yang lain). Dan hanya kepada
Tuhanmulah engkau berharap.
(QS. Al-Insyirah,6-8)
Banyak kegagalan dalam hidup ini dikarenakan orang-orang
tidak menyadari betapa dekatnya mereka dengan
keberhasilan saat mereka menyerah.
(Thomas Alva Edison)
Salah satu cara menyelamatkan diri dari kegagalan hanyalah
diri kita. Kita tak harus tinggal di dalam kegagalan, kita
bangkit, kita melangkah menuju cahaya kesuksesan.
(Abiyyu Muhmmad Afif)
1
SANWACANA
Assalamu’alaikum Warahmatullahi Wabarokatuh.
Alhamdulillah puji syukur penulis ucapkan kepada Allah SWT atas segala limpah
rahmat dan nikmat yang dikaruniakan−Nya telah memberikan kekuatan dan
kemampuan berfikir kepada penulis dalam menyelesaikan Skripsi ini tepat pada
waktunya. Sholawat serta salam penulis junjung agungkan kepada Rasulullah
Muhammad SAW.
Skripsi yang berjudul “IMPLEMENTASI KESEIMBANGAN PADA SISTEM
BALL AND BEAM MENGGUNAKAN KENDALI FUZZY LOGIC” sebagai salah
satu syarat untuk menggapai gelar Sarjana Teknik pada Jurusan Teknik Elektro
Fakultas Teknik Universitas Lampung.
Selama proses pengerjaan skripsi ini penulis ingin menyampaikan terima kasih
kepada semua pihak yang telah membantu penulis untuk menyelesaikan Skripsi
dengan baik dan tepat pada waktunya khususnya kepada:
1. Bapak Prof. Dr. Suharno. M.Sc., Ph.D., selaku Dekan Fakultas Teknik
2. Bapak Dr. Ing. Ardian Ulvan, S.T., M.Sc selaku Ketua Jurusan Teknik
Elektro Universitas Lampung.
3. Bapak Emir Nasrullah, S.T., M.Eng. selaku Dosen Pembimbing Utama
Skripsi.
2
4. Bapak Sumadi, S.T., M.T. selaku Dosen Pembimbing Pendamping Skripsi.
5. Bapak Agus Trisanto, Ph. D. selaku Penguji Skripsi.
6. Bapak dan Ibu Dosen Jurusan Teknik Elektro yang telah mendidik,
membimbing dan memberikan ilmu pengetahuannya kepada penulis.
7. Mba Ning dan seluruh jajaran staff administrasi Jurusan Teknik Elektro
Universitas Lampung.
8. Orang tua dan adik yang selalu memberikan doa, nasihat dan dukungan agar
pelaksanaan Skripsi dan penyusunan laporan Skripsi dapat diselesaikan oleh
penulis dengan tepat waktu.
9. Siti Farhana, S. Pd. selaku teman dekat yang telah meluangkan waktu
memberikan perhatian dan kasih sayangnya serta mendengarkan keluhan
penulis selama mengerjakan Skripsi.
10. Ahmad Asmara Kandi, Brian Akbar, Arga Yulianto, Desi Deria Safitri, Selvy
Sari Wn, Desti Anggistia, Muhammad Sidiq, Yogi Aliyekti, Safira Basyaib,
dan Ivonne Nisrina Kusuma selaku teman seperjuangan, teman
se−permainan, teman saling berbagai ilmu dan sharing dikala penulis
mengalami kesulitan dalam megerjakan Skripsi.
11. Teman-teman seperjuangan Teknik Elektro angkatan 2014 yang telah
memberikan semangat agar penulis dapat termotivasi menyelesaikan Skripsi
tepat pada waktunya.
12. Semua pihak yang tidak dapat disebutkan satu per satu yang telah membantu
penulis selama pengerjaan Skripsi berlangsung.
Penulis menyadari banyak kekurangan dalam melaksanakan Skripsi dan
meyelesaikan laporan Skripsi sehingga penulis mengharapkan kritik dan saran

3
untuk kemajuan diri penulis. Insyaallah Allah SWT membalas semua kebaikan
semua pihak yang telah membantu penulis menyelesaikan Skripsi ini agar laporan
Skripsi dapat bermanfaat bagi pemuda penerus bangsa.
Wassalamu’alaikum Warahmatullahi Wabarokatuh.
Bandarlampung, 18 November 2018
Penulis
1
DAFTAR ISI
Halaman
DAFTAR ISI ................................................................................................. xii
DAFTAR GAMBAR ................................................................................... xiv
DAFTAR TABEL ....................................................................................... xvi
I. PENDAHULUAN
1.1. Latar Belakang dan Masalah .......................................................... 1
1.2. Tujuan Penelitian ............................................................................ 3
1.3. Rumusan Masalah .......................................................................... 3
1.4. Batasan Masalah ............................................................................. 4
1.5. Hipotesis ......................................................................................... 4
1.6. Sistematika Penulisan ..................................................................... 5
II. TINJAUAN PUSTAKA
2.1. Deskripsi Sistem Ball and Beam .................................................... 6
2.2. Model Matematis Sistem Ball and Beam ....................................... 7
2.3. Dasar Sistem Kendali ..................................................................... 8
2.4. Kendali Fuzzy Logic ............................................................................ 9 2.4.1. Himpunan Fuzzy ................................................................ 10
2.4.2. Fungsi Keanggotan ............................................................ 11
2.5. Kendali PID (Metode Ziegler-Nichols) ............................................. 14
2.5.1. Metode Ziegler-Nichols Tipe 1 (Open Loop) ....................... 14
2.5.2. Metode Ziegler-Nichols Tipe 2 (Close Loop) ...................... 15
2.6. Arduino Mega 2560 ....................................................................... 16
2.7. Motor Servo ................................................................................... 20
2.8. Sensor Ultrasonik .......................................................................... 20
III.METODE PENELITIAN
3.1. Waktu dan Tempat Penelitian ....................................................... 22
3.2. Alat dan Bahan .............................................................................. 23
3.3. Spesifikasi Alat .............................................................................. 23
3.4. Metode Kerja ................................................................................. 24
3.4.1. Diagram Alir Penelitian ..................................................... 24
3.4.2. Perancangan Model Sistem ................................................ 25
3.4.3. Perancangan Hardware Sistem .......................................... 26
2
3.4.4. Perancangan Fuzzy Logic Control (FLC) .......................... 27
3.4.5. Perancangan Kendali PD ...................................................... 31
3.4.6. Diagram Alir Sistem .......................................................... 32
3.5. Pengujian Sistem ........................................................................... 33
3.5.1. Pengujian Setiap Komponen .............................................. 33
3.5.2. Pengujian Program ............................................................. 33
3.5.3. Pengujian Alat ................................................................... 33
3.6. Pengambilan Data dan Analisis ..................................................... 34
3.6.1. Data Posisi Bola ................................................................. 34
3.6.2. Data Sensor Ultrasonik ...................................................... 34
3.6.3. Data Tanggapan Sistem ..................................................... 34
3.7. Penulisan Laporan ......................................................................... 35
IV. HASIL DAN PEMBAHASAN
4.1. Prinsip Dasar Kerja Sistem................................................................ 36
4.2. Hasil Pengujian Komponen ............................................................... 36
4.2.1. Pengujian Sensor Ultrasonik ................................................. 37
4.2.2. Pengujian Motor Servo .......................................................... 38
4.3. Hasil Pengujian Program Kendali Fuzzy logic .................................. 39 4.3.1. Pembacaan Masukan Sensor Ultrasonik ............................ 39
4.3.2. Proses Fuzzifikasi Masukan Kendali Fuzzy Logic ............ 40
4.3.3. Perancangan Rule Fuzzy .................................................... 42
4.3.4. Defuzzifikasi ...................................................................... 44
4.3.5. Pengaturan Putaran Motor Servo Berdasarkan Keluaran
Fuzzy Logic ....................................................................... 45
4.4. Program Pengujian Kendali PD ..................................................... 46
4.4.1. Persamaan Transfer Function ............................................... 46
4.4.2. Metode Ziegler-Nichols dengan Closed Loop ...................... 47
4.5. Program Pengujian Kendali ON/OFF ............................................... 48 4.6. Pengujian dan Pengambilan Data .................................................. 49
4.7. Analisa dan Pembahasan Hasil Pengujian ..................................... 50
4.7.1. Respon Sistem Posisi Bola di Kiri ..................................... 50
4.7.2. Respon Sistem Posisi Bola di Tengah ............................... 53
4.7.3. Respon Sistem Posisi Bola di Kanan ................................. 54
V. KESIMPULAN DAN SARAN
5.1. Kesimpulan .................................................................................... 57
5.2. Saran .............................................................................................. 58
DAFTAR PUSTAKA
LAMPIRAN
1
DAFTAR GAMBAR
Gambar Halaman
2.1. Mekanika Sistem Ball and Beam .................................................... 7
2.2. Sistem Kendali dengan Open Loop ................................................. 8
2.3. Sistem Kendali dengan Closed Loop ............................................... 9
2.4. Representasi Linear Naik................................................................ 12
2.5. Representasi Linear Turun.............................................................. 12
2.6. Representasi Kurva Segitiga ........................................................... 13
2.7. Representasi Kurva Trapesium ....................................................... 13
2.8. Aturan Metode Ziegler-Nichols Tipe 1 .......................................... 14
2.9. Aturan Metode Ziegler-Nichols Tipe 2 .......................................... 15
2.10. Arduino Atmega 2560 .................................................................... 17
2.11. Motor Servo SG996R ..................................................................... 20
2.12. Sensor Ultrasonik HC-SR04 ........................................................... 21
3.1. Diagram Alir Penelitian .................................................................. 24
3.2. Blok Diagram Sistem ..................................................................... 25
3.3. Perancangan Hardware Sistem ...................................................... 26
3.4. Blok Diagram Kendali Sistem ........................................................ 27
3.5. Fungsi Keanggotaan Masukan Position ......................................... 30
3.6. Fungsi Keanggotaan Masukan Set point ........................................ 30
3.7. Fungsi Keanggotaan Keluaran Theta ............................................. 30
3.8. Diagram Alir Sistem ....................................................................... 32
4.1. Pengujian Sensor Ultrasonik HC-SR04 .......................................... 37
4.2. Hasil Pengujian Sensor Ultrasonik HC-SR04 ................................ 37
4.3. Hasil Pengujian Pergerakan Motor Servo SG996R ........................ 38
4.4. Program Pembacaan Sensor Ultrasonik ......................................... 40
4.5. Fuzzifikasi dari Masing-Masing Fungsi Keanggotaan ................... 41
4.6. Syntax Rule Fuzzy Logic ................................................................ 43
4.7. Metode Fuzzy Logic Mamdani ....................................................... 44
4.8. Pengkondisian Gerak Motor Servo ................................................. 45
4.9. Kalkulasi Transfer Function di Matlab .......................................... 46
4.10. Simulasi Metode Ziegler-Nichols dengan Closed Loop ................. 47
4.11. Syntax Kendali PD .......................................................................... 48
4.12. Syntax Kendali ON/OFF ................................................................. 48
4.13. Skenario Pengujian dan Pengambilan Data .................................... 49
4.14. Posisi Bola di Kiri Menggunakan Kendali ON/OFF ...................... 50
4.15. Posisi Bola di Kiri Menggunakan Kendali PD ............................... 50
4.16. Posisi Bola di Kiri Menggunakan Kendali Fuzzy Logic................. 51
4.17. Analisa Respon Sistem Saat Posisi Bola di Kiri............................. 52
2
4.18. Posisi Bola di Tengah Menggunakan Kendali ON/OFF ................ 53
4.19. Posisi Bola di Tengah Menggunakan Kendali PD ......................... 53
4.20. Posisi Bola di Tengah Menggunakan Kendali Fuzzy Logic ........... 53
4.21. Posisi Bola di Kanan Menggunakan Kendali ON/OFF .................. 54
4.22. Posisi Bola di Kanan Menggunakan Kendali PD ........................... 54
4.23. Posisi Bola di Kanan Menggunakan Kendali Fuzzy Logic............. 55
4.24. Analisa Respon Sistem Saat Posisi Bola di Kanan......................... 55

1
DAFTAR TABEL
Tabel Halaman
1.1. Review Penelitian Sebelumnya.......................................................... 2
2.1. Aturan Metode Ziegler-Nichols Tipe 1 ............................................. 15
2.2. Aturan Metode Ziegler-Nichols Tipe 2 ............................................. 16
2.3. Datasheet Arduino Atmega 2560 ..................................................... 18
3.1. Jadwal dan Aktifitas Penelitian ......................................................... 22
3.2. Fuzzy Rule Base ................................................................................ 29
3.3. Parameter Sistem Ball and Beam ...................................................... 31
4.1. Ziegler-Nichols Tuning ..................................................................... 47
4.2. Karakteristik Respon Waktu Posisi Bola di Kiri .............................. 52
4.3. Karakteristik Respon Waktu Posisi Bola di Kanan .......................... 56

1
BAB I
PENDAHULUAN
1.1. Latar Belakang dan Masalah
Suatu objek bergantung terhadap objek lain ketika posisi setimbang dapat
dijadikan suatu acuan dalam menerapkan dan menyelesaikan permasalahan
sistem kendali. Permasalahan keseimbangan ini merupakan salah satu hal
yang berkaitan dengan gerakan dan sering berkaitan pada pengaplikasian
robotik. Sistem kendali yang tidak stabil dapat dijadikan penelitian agar
memperoleh kesimpulan berupa respon sistem. Keseimbangan pada sistem
ball and beam dapat dijadikan pengaplikasian sederhana untuk mempelajari
sistem kendali [9].
Sistem ball and beam ini mencakup bola, balok, motor, dan beberapa sensor.
Ide dasarnya adalah menggunakan torsi yang dihasilkan dari motor ke
kendali posisi bola pada balok. Bola akan bergerak pada balok dengan
bebas. Dengan menggunakan teknik penginderaan linier, informasi dari
sensor dapat diambil dan dibandingkan dengan nilai posisi yang diinginkan.
Selisih nilai bisa diumpankan kembali ke kontroler, lalu masuk ke motor
untuk mendapatkan posisi yang diinginkan. Dengan mempertimbangkan
masalah plant diatas seperti noise sensor, saturasi actuator, pengendali

2
sistem menjadi lebih efisien, dan kuat [12]. Beberapa penelitian sebelumnya
mengenai ball and beam dengan sistem kendali yang pernah diuji coba
sebagai berikut:
Tabel 1.1. Review Penelitian Sebelumnya
Nama Peneliti Judul Penelitian Hasil Penelitian Saran
Thiang, Jaury
Adi Wijaya,
Anies
Hannawati,
Resmana
Lim. 2000
Kendali Logika
Fuzzy Pada Sistem
Batang
Penyeimbang Bola
Sistem kendali menggunakan logika
fuzzy cukup mampu mengendalikan
sistem batang penyeimbang bola
namun respon sistem masih dapat
diperbaiki dalam hal sensor posisi
bola [11].
Pengujian selanjutnya dapat
dilanjutkan dengan penambahan
membership function agar respon
lebih membaik [11].
M. Muslim
W. 2011
Perancangan dan
Pembuatan Plant Ball and Beam
Penambahan kendali PD pada sistem
ball and beam dapat membuat root locus tertarik ke sebelah kiri sumbu
imajiner yaitu menuju daerah yang
lebih stabil. Untuk dapat mencapai
posisi yang diinginkan bola tidak
akan langsung berhenti tetapi bola
akan berosilasi terlebih dahulu
kemudian baru dapat berhenti [6].
Untuk menstabilkan plant ball and
beam dapat digunakan kontroller
lain seperti kontroller Fuzzy.
Sebagai pengembangan dari tugas
akhir ini dapat dilakukan
penambahan jumlah posisi yang
diinginkan yaitu lebih dari dua
posisi [6].
Hindami
Muhammad.
2017
Desain dan
Impelementasi
Kendali PID Pada
Beam and Ball System
Penggunaan parameter P hanya
menyebabkan osilasi pada respon
sistem dan semakin cepat rise time.
Kemudian penambahan parameter I
akan menaikan orde pada sistem dan
menyebabkan ketidakstabilan sistem.
Untuk penambahan parameter D
dapat meremdam osilasi.
Penambahan kendali PID masih
memiliki eror steady state dan
overshoot cukup besar [5].
-
Else Orlanda
Merti Wijaya
dan Bambang
Suprianto.
2018
Perancangan
Sistem
Keseimbangan
Ball And Beam Dengan
Menggunakan
Pengendali PID
Berbasis Arduino
UNO
Sistem keseimbangan ball and beam
dengan pengendali PID berbasis
Arduino UNO menggunakan metode
Ziegler-Nichols dapat berada dalam
psosi atau jarak seimbang yang
diinginkan dengan memiliki nilai
error yang dihasilkan kecil. Untuk
time response menuju steady state
juga baik, jadi dapat dikatakan
metode ini dapat dikatakan berhasil
[13].
Dapat dikembangkan dengan
mengubah jenis metode
pengontrolan yang lain, seperti
adaptif, fuzzy logic, jaringan saraf
tiruan (JST), dll agar dapat
menggurangi nilai error steady state. Penambahan sensor atau
dengan penggantian sensor jenis
lain yang lebih akurat agar
pembacaan posisi bola lebih
presisi [13].
Abiyyu
Muhammad
Afif. 2018
Implementasi
Keseimbangan
Pada Sistem Ball
And BeamMengggunak
an Kendali Fuzzy Logic
Penggunaan kendali fuzzy logic pada
sistem ball and beam dapat
menstabilkan sistem agar tidak
terdapat nilai overshoot dan dapat
memperbaiki respon sistem menjadi
lebih baik
-
3
Berdasarkan penjelasan tersebut, penelitian yang akan dilakukan untuk
memperbaiki sistem kerja dengan menggunakan metode pengendalian fuzzy
logic yang disarankan oleh peneliti sebelumnya dikarenakan dapat
meningkatkan respon sistem yang lebih baik. Oleh karena itu penulis dalam
penelitiannya mempunyai ide atau gagasan untuk melakukan implementasi
kendali pada sistem ball and beam menggunakan kendali fuzzy logic agar
dapat diuji seberapa pengaruh memperbaiki sistem kendali setimbang.
Penelitian diterapkan secara sederhana dari sistem ball and beam agar
mengetahui hasil keluaran keseimbangan respon sistemnya. Penelitian
tersebut membutuhkan masukan sinyal dari parameter position dan nilai set
point yang terjadi pada sistem keseimbangan ball and beam.
1.2. Tujuan Penelitian
Penelitian implementasi ini akan dilaksanakan dengan tujuan memperbaiki
sistem kendali ball and beam menggunakan kendali fuzzy logic untuk
mengetahui seberapa baik respon sistem yang dihasilkan agar menuju sistem
dalam keadaan steady state atau keadaan setimbang.
1.3. Rumusan Masalah
Rumusan masalah penilitian ini difokuskan pada beberapa aspek yaitu:
1. Mempelajari dan mendesain kendali fuzzy logic untuk mengendalikan
sistem ball and beam.
4
2. Membuat implementasi secara sederhana dari sistem keseimbangan ball
and beam yang akan dijadikan sebagai uji coba sistem pengendaliannya.
3. Mengetahui seberapa besar pengaruh keseimbangan pada sistem ball
and beam setelah menggunakan kendali fuzzy logic.
4. Mengetahui respon dari sistem setelah dilakukan uji coba menggunakan
kendali fuzzy logic.
1.4. Batasan Masalah
Batasan masalah melakukan implementasi penelitian ini yaitu:
1. Mengimplementasikan sistem ball and beam sederhana dengan
menampilkan keseimbangan dari sistem tersebut.
2. Memperbaiki sistem keseimbangan ball and beam dengan pengendalian
fuzzy logic untuk melihat hasil respon sistemnya.
1.5. Hipotesis
Pemilihan sistem kendali PID pada penelitian sebelumnya memiliki
kelemahan pada kestabilan sistem sehingga terdapat nilai overshoot dan
respon sistem masih dalam kondisi berosilasi. Hal tersebut yang
menyebabkan keseimbangan pada sistem ball and beam perlu diperhatikan.
Oleh karena itu, perlu dilakukan perancangan sistem pengendalian fuzzy
logic yang memiliki tingkat kestabilan yang lebih baik.
5
1.6. Sistematika Penulisan
Adapun sistematika penulisan laporan penelitian ini adalah sebagai berikut:
BAB I – PENDAHULUAN
Berisikan tentang latar belakang penulis melakukan penelitian tugas akhir,
tujuan penelitian, rumusan masalah, batasan masalah, hipotesis penelitian
yang dilakukan oleh penulis dan sistematika penulisan laporan tugas akhir.
BAB II – TINJAUAN PUSTAKA
Berisikan tentang tinjauan pustaka berupa teori-teori pendukung dalam
melakukan pengerjaan tugas akhir yang dapat diterapkan dengan mencari
sumber-sumber ilmiah seperti buku atau jurnal penelitian untuk panduan.
BAB III – METODE PENELITIAN
Berisikan tentang penjelasan tentang waktu dan tempat pengerjaan
penelitian tugas akhir, alat dan bahas yang dipergunakan, diagram alir dari
sistem serta metode yang digunakan penulis untuk mengerjakan tugas agar
dapat mengamati hasil akhirnya.
BAB IV – HASIL DAN PEMBAHASAN
Berisikan tentang hasil yang diperoleh oleh penulis ketika melakukan
penelitian tugas akhir dan dibahas dalam bab ini berupa pemaparan data
hasil yang diperoleh.
BAB V – PENUTUP
Berisikan tentang kesimpulan dan saran dari data dan pembahasan yang
diperoleh ketika penulis melakukan pengamatan penelitian tugas akhir ini.
7
BAB II
TINJAUAN PUSTAKA
2.1. Deskripsi Sistem Ball and Beam
Sistem ball and beam adalah salah satu model peraga laboratorium yang
paling populer untuk pengajaran teknik sistem kendali. Ball and beam
banyak digunakan karena sangat sederhana untuk dipahami sebagai sebuah
sistem. Ball and beam memiliki model demo yang paling penting,
dikarenakan saat sistem pengendalian open loop menjadi tidak stabil.
Sistemnya sangat sederhana yaitu bola yang menggelinding di atas balok
panjang. Balok dipasang pada poros keluaran motor listrik sehingga
baloknya dapat dibuat miring pada poros tengahnya dengan menerapkan
sinyal kendali listrik ke penguat motor. Tugas sistem kendali adalah
mengatur secara otomatis posisi bola pada balok dengan mengubah sudut
balok. Tugas tersebut yang sulit dikarenakan bola tidak tetap di satu tempat
pada balok namun bergerak dengan akselerasi yang kira-kira sebanding
dengan kemiringan balok. Oleh karena itu, sistem kendali open loop tidak
stabil karena output sistem (posisi bola) meningkat tanpa batas untuk input
tetap (sudut balok). Pengendalian umpan balik harus digunakan untuk
menstabilkan sistem dan menahan bola pada posisi yang diinginkan pada
balok [12].
7
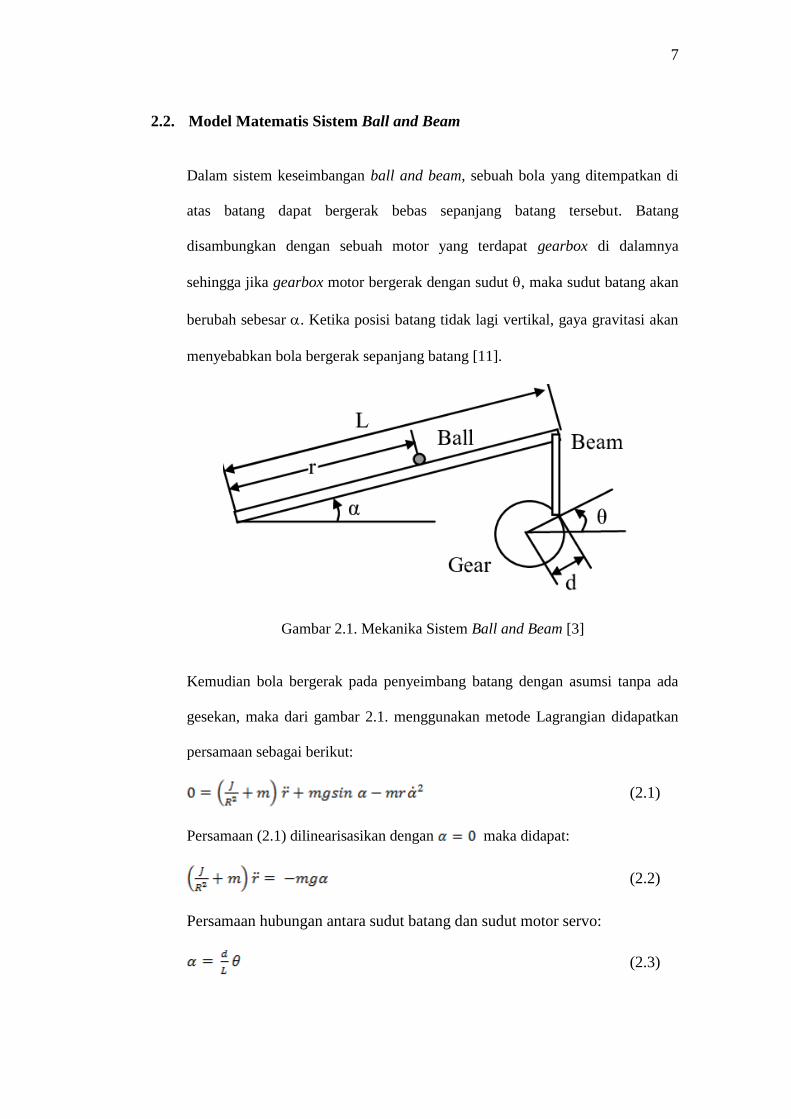
2.2. Model Matematis Sistem Ball and Beam
Dalam sistem keseimbangan ball and beam, sebuah bola yang ditempatkan di
atas batang dapat bergerak bebas sepanjang batang tersebut. Batang
disambungkan dengan sebuah motor yang terdapat gearbox di dalamnya
sehingga jika gearbox motor bergerak dengan sudut , maka sudut batang akan
berubah sebesar . Ketika posisi batang tidak lagi vertikal, gaya gravitasi akan
menyebabkan bola bergerak sepanjang batang [11].
Gambar 2.1. Mekanika Sistem Ball and Beam [3]
Kemudian bola bergerak pada penyeimbang batang dengan asumsi tanpa ada
gesekan, maka dari gambar 2.1. menggunakan metode Lagrangian didapatkan
persamaan sebagai berikut:
(2.1)
Persamaan (2.1) dilinearisasikan dengan maka didapat:
(2.2)
Persamaan hubungan antara sudut batang dan sudut motor servo:
(2.3)

8
Subtitusi antara persamaan (2.3) dengan (2.2) yaitu
(2.4)
Dari persamaan (2.4), transformasi Laplace tersebut adalah
(2.5)
Fungsi transfer dari persamaan (2.5) yaitu
(2.6)
2.3. Dasar Sistem Kendali
Sistem kendali merupakan suatu sistem yang keluaran sistemnya
dikendalikan agar memperoleh suatu nilai yang telah ditargetkan atau
merubah beberapa tuntunan yang telah ditetapkan oleh masukan ke sistem.
Pada sistem kendali ini terdapat suatu model yang diartikan sebagai sesuatu
yang berfungsi untuk proses mengubah hubungan dari setting aktual menjadi
bentuk lain[10]. Bentuk dasar sistem kendali ini dapat dibedakan menjadi
dua bentuk yaitu sebagai berikut:
1. Sistem Kendali dengan Open Loop
Sistem kendali open loop merupakan suatu sistem pengendalian dengan
kongfigurasi mengukur kondisi yang dihendaki, tetapi dalam hal ini hasil
dari keluaran sistem tidak dimodifikasi untuk merubah kondisi [10].
Gambar 2.2. Sistem Kendali dengan Open Loop
Controller Input Signal Output
Process

9
2. Sistem Kendali dengan Closed Loop
Sistem kendali dengan closed loop merupakan suatu sistem
pengendalian dengan menggunakan sebagian nilai keluaran sistem
sebagai feedback ke dalam masukan yang berguna untuk merubah
masukan sehingga keluaran dapat mempertahankan kondisi tertentu dan
akan mengabaikan beberapa perubahan kondisi [10].
Gambar 2.3. Sistem Kendali dengan Closed Loop
2.4. Kendali Fuzzy logic
Fuzzy logic adalah suatu proses pengambilan kesimpulan berdasarkan
ketentuan yang bertujuan untuk memecahkan permasalahan, dimana sistem
tersebut sulit untuk disimulasikan atau terdapat kesamaran dan
ketidakpastian yang berlimpah. Fuzzy logic ditetapkan oleh persamaan
logika bukan dari persamaan differensial komplek dan berasal dari
pemikiran yang mengidentifikasi serta mengambil keuntungan dari
kekaburan. Pada fuzzy logic, suatu nilai dapat berupa “true” dan “false”
secara beriringan. Tingkat “true” atau “false” nilai dalam fuzzy logic terpaku
pada variable keanggotaan yang dimilikinya. Fuzzy logic memiliki tingkat
keanggotaan rentang antara 0 hingga 1, dibandingkan logika digital yang
Controller Input Signal Output
Process
Measuring
Element
10
hanya memiliki dua keanggotaan 0 atau 1 saja pada satu waktu. Fuzzy logic
dipergunakan untuk menyatakan besaran nilai yang diibaratkan dalam
bahasa. Kelebihan fuzzy logic pada penguasaan kelogisan dari segi bahasa,
sehingga dalam perancangannya tidak memerlukan persamaan matematis
yang rumit dari objek yang akan dikendalikan [8].
2.4.1.Himpunan Fuzzy
Prinsip dasar dari teori himpunan fuzzy logic merupakan suatu teori
berupa pengelompokkan objek dengan batas-batas tertentu yang samar.
Suatu fungsi yang menyatakan tingkat kesamaan bagian-bagian dalam
semesta dengan konsep disebut ketentuan keanggotaan himpunan.
Fungsi keanggotan dan tingkat keanggotaan merupakan faktor yang
harus dimiliki oleh himpunan yang kemudian menjadi fuzzy set. Dalam
tingkat keanggotan dapat dinyatakan dengan tegas atau bilangan real
yaitu kondisi ON atau OFF dengan nilai 1 atau 0. Dengan peristilahan,
fungsi keanggotaan dari suatu himpunan kabur A dalam semesta X
adalah pemetaan μA dari X antara [0,1] yaitu μA : X [0,1]. Nilai fungsi
μA(x) mengungkapkan tingkat keanggotaan unsur x X dalam
himpunan kabur A. Apabila nilai fungsi bernilai “1” maka dinyatakan
dalam keanggotan penuh, dan sebaliknya apabila nilai fungsi bernilai
“0” maka dinyatakan bukan anggota himpunan tersebut[8]. Adapun
beberapa hal yang harus diketahui dari sistem fuzzy logic sebagai
berikut:
11
1. Variable fuzzy merupakan suatu isyarat atau variable yang akan
dilakukan pengkajian dalam suatu sistem fuzzy logic.
2. Himpunan fuzzy merupakan suatu pengelompokkan dari perwakilan
kondisi-kondisi dalam variable fuzzy
3. Semesta wacana merupakan keseluruhan nilai yang dapat
diaplikasikan dalam variable fuzzy dengan memiliki himpunan
bilangan real yang memiliki grafik naik bertambah secara perlahan
dari kiri ke kanan. Nilai semesta wacana dapat di daerah bilangan
positif atau negatif.
4. Domain himpunan fuzzy merupakan keseluruhan nilai yang
dipersetujui yang ada di semesta wacana dan diaplikasikan ke
himpunan fuzzy [8].
2.4.2. Fungsi Keanggotan
Fungsi keanggotaan (membersip function) adalah suatu grafik yang
menampilkan pemetaan koordinat masukan data ke dalam nilai
keanggotaannya yang mempunyai rentang antara nol sampai satu.
Salah satu cara yang dapat dilakukan untuk menentukkan nilai
keanggotaan adalah melalui pendekatan fungsi. Representasi dari
fungsi keanggotaan ini dapat digambarkan dengan dua bentuk yaitu
linear atau garis lurus dan kurva [8]. Ada beberapa fungsi yang bisa
digunakan, yaitu:
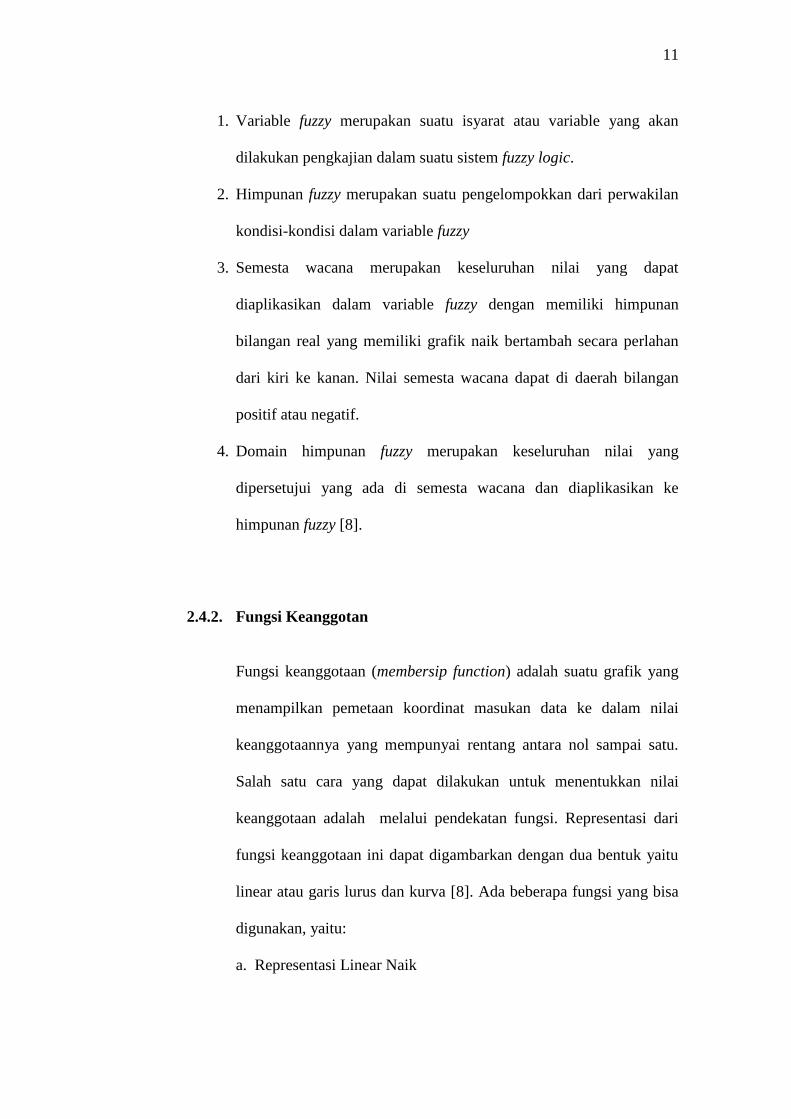
a. Representasi Linear Naik
12
Titik awal himpunan dari domian yang memiliki nilai
keanggotaaan nol bergerak naik ke kanan mencapai ke domain
yang memiliki nilai keanggotaan lebih tinggi.
Gambar 2.4. Representasi Linear Naik
Fungsi dari keanggotaan representasi linear naik sebagai berikut
(2.7)
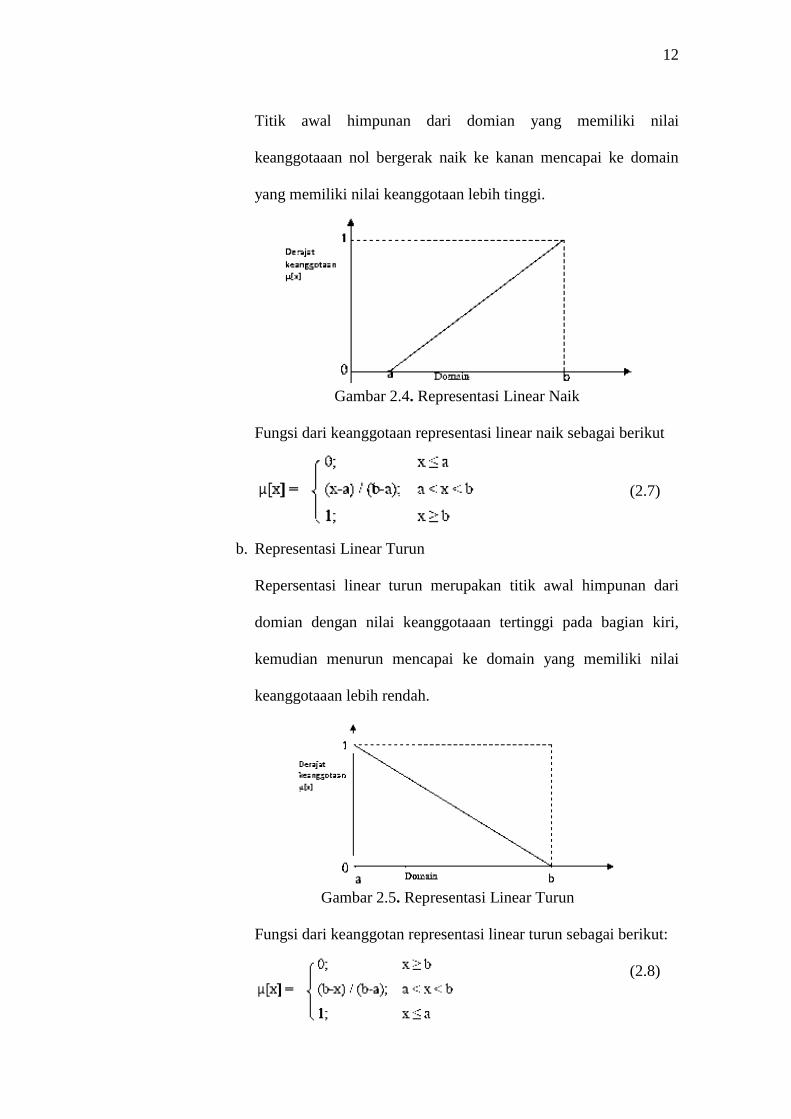
b. Representasi Linear Turun
Repersentasi linear turun merupakan titik awal himpunan dari
domian dengan nilai keanggotaaan tertinggi pada bagian kiri,
kemudian menurun mencapai ke domain yang memiliki nilai
keanggotaaan lebih rendah.
Gambar 2.5. Representasi Linear Turun
Fungsi dari keanggotan representasi linear turun sebagai berikut:
(2.8)
13
c. Representasi Kurva Segitiga
Kurva segitiga adalah pengimplementasian dari dua garis linear
yatu representasi dari naik dan turun menjadi satu.
Gambar 2.6. Representasi Kurva Segitiga
Fungsi dari keanggotan representasi kurva segitiga sebagai
berikut:
(2.9)
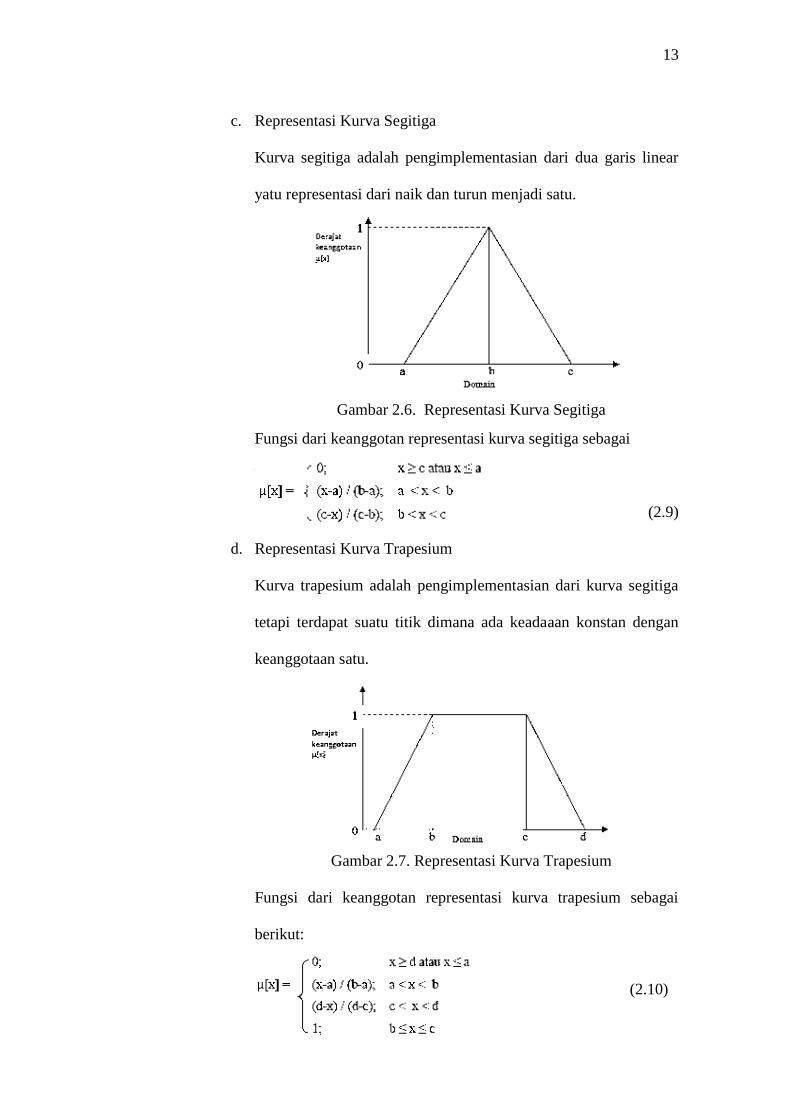
d. Representasi Kurva Trapesium
Kurva trapesium adalah pengimplementasian dari kurva segitiga
tetapi terdapat suatu titik dimana ada keadaaan konstan dengan
keanggotaan satu.
Gambar 2.7. Representasi Kurva Trapesium
Fungsi dari keanggotan representasi kurva trapesium sebagai
berikut:
(2.10)
14
2.5. Kendali PID (Metode Ziegler-Nichols)
Metode Ziegler-Nichols adalah metode trial and error yang telah
dikembangkan. Metode ini digunakan untuk mendapatkan nilai awal untuk
melakukan manual tunning. Ziegler Nichols akan menetapkan nilai
parameter pada PID agar respon sistem yang dihasilkan membaik. Metode
tersebut akan menemukan nilai konstanta dari PID yaitu nilai propotional
gain (Kp), nilai waktu integral(Ti) dan nilai waktu derivative(Td)
berdasarkan karakteristik respon peralihan dari sistem [7]. Metode Ziegler-
Nichols terbagi atas dua metode yaitu:
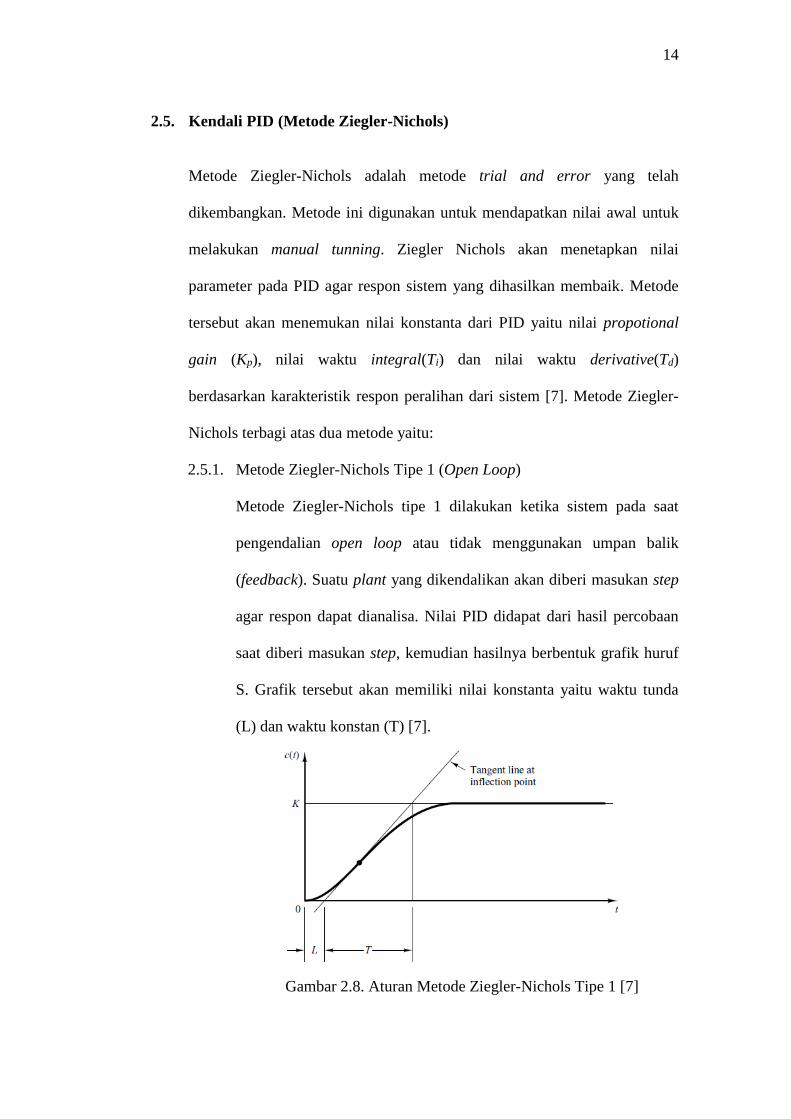
2.5.1. Metode Ziegler-Nichols Tipe 1 (Open Loop)
Metode Ziegler-Nichols tipe 1 dilakukan ketika sistem pada saat
pengendalian open loop atau tidak menggunakan umpan balik
(feedback). Suatu plant yang dikendalikan akan diberi masukan step
agar respon dapat dianalisa. Nilai PID didapat dari hasil percobaan
saat diberi masukan step, kemudian hasilnya berbentuk grafik huruf
S. Grafik tersebut akan memiliki nilai konstanta yaitu waktu tunda
(L) dan waktu konstan (T) [7].
Gambar 2.8. Aturan Metode Ziegler-Nichols Tipe 1 [7]
15
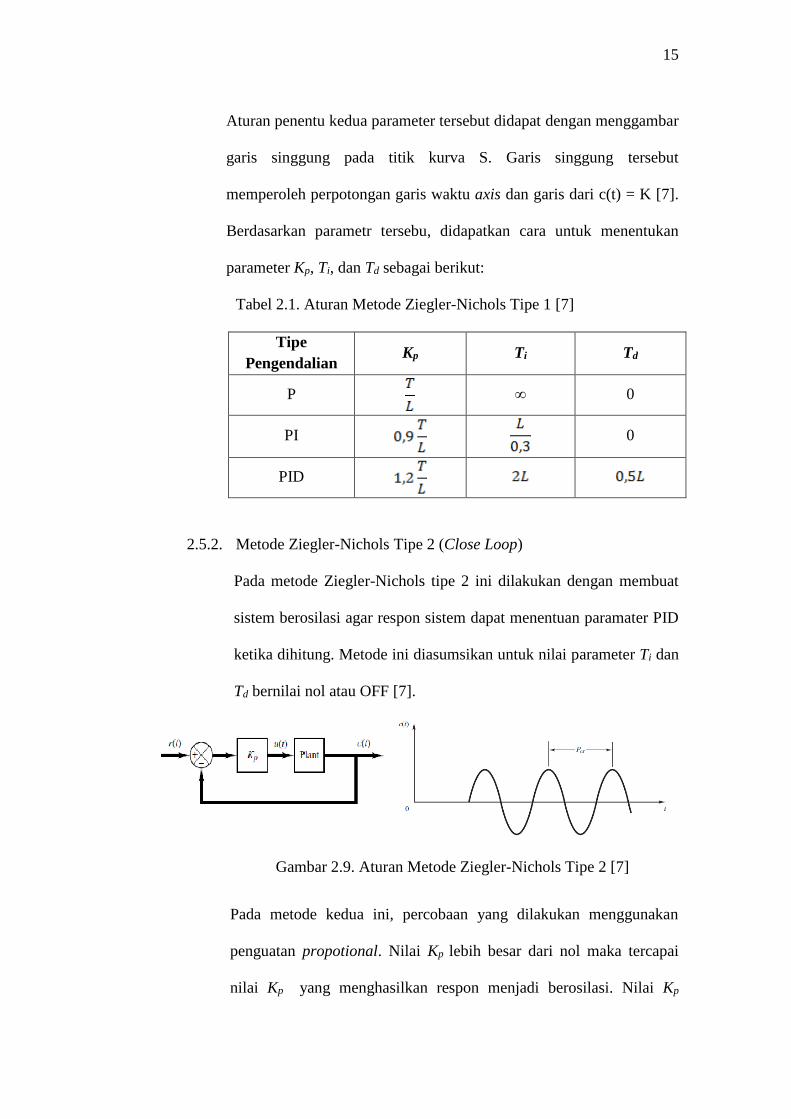
Aturan penentu kedua parameter tersebut didapat dengan menggambar
garis singgung pada titik kurva S. Garis singgung tersebut
memperoleh perpotongan garis waktu axis dan garis dari c(t) = K [7].
Berdasarkan parametr tersebu, didapatkan cara untuk menentukan
parameter Kp, Ti, dan Td sebagai berikut:
Tabel 2.1. Aturan Metode Ziegler-Nichols Tipe 1 [7]
Tipe
Pengendalian Kp Ti Td
P
∞ 0
PI
0
PID
2.5.2. Metode Ziegler-Nichols Tipe 2 (Close Loop)
Pada metode Ziegler-Nichols tipe 2 ini dilakukan dengan membuat
sistem berosilasi agar respon sistem dapat menentuan paramater PID
ketika dihitung. Metode ini diasumsikan untuk nilai parameter Ti dan
Td bernilai nol atau OFF [7].
Gambar 2.9. Aturan Metode Ziegler-Nichols Tipe 2 [7]
Pada metode kedua ini, percobaan yang dilakukan menggunakan
penguatan propotional. Nilai Kp lebih besar dari nol maka tercapai
nilai Kp yang menghasilkan respon menjadi berosilasi. Nilai Kp
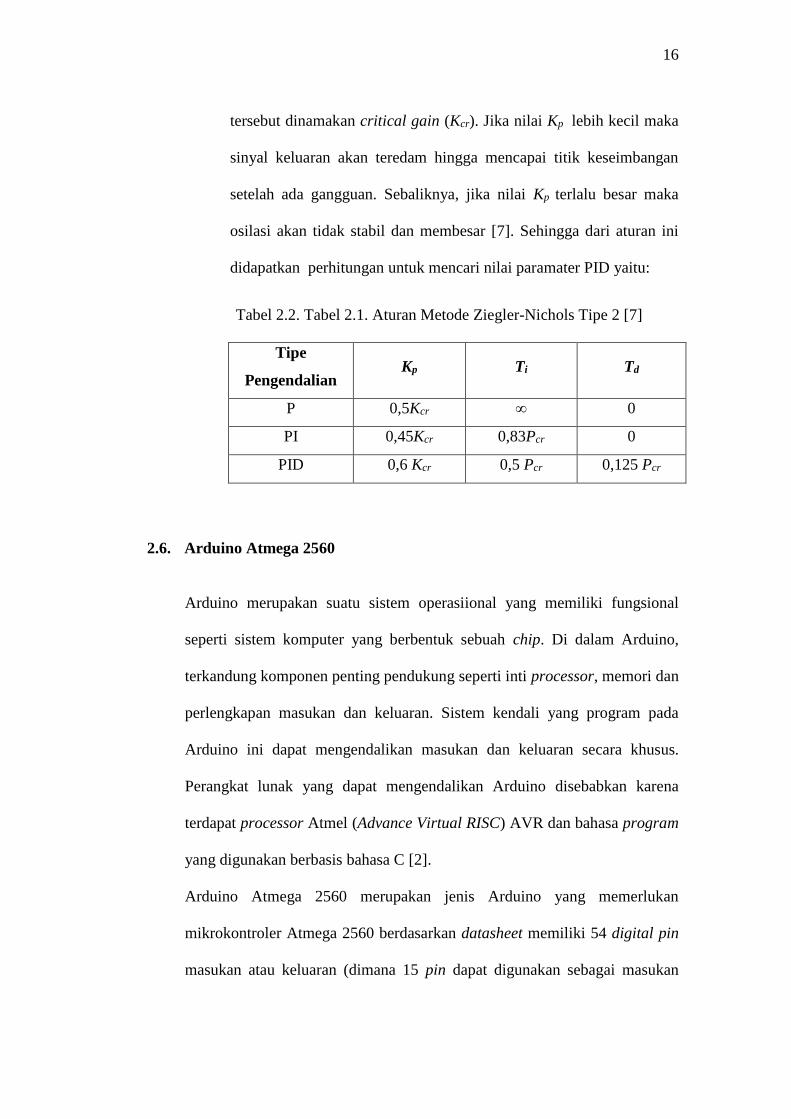
16
tersebut dinamakan critical gain (Kcr). Jika nilai Kp lebih kecil maka
sinyal keluaran akan teredam hingga mencapai titik keseimbangan
setelah ada gangguan. Sebaliknya, jika nilai Kp terlalu besar maka
osilasi akan tidak stabil dan membesar [7]. Sehingga dari aturan ini
didapatkan perhitungan untuk mencari nilai paramater PID yaitu:
Tabel 2.2. Tabel 2.1. Aturan Metode Ziegler-Nichols Tipe 2 [7]
Tipe
Pengendalian Kp Ti Td
P 0,5Kcr ∞ 0
PI 0,45Kcr 0,83Pcr 0
PID 0,6 Kcr 0,5 Pcr 0,125 Pcr
2.6. Arduino Atmega 2560
Arduino merupakan suatu sistem operasiional yang memiliki fungsional
seperti sistem komputer yang berbentuk sebuah chip. Di dalam Arduino,
terkandung komponen penting pendukung seperti inti processor, memori dan
perlengkapan masukan dan keluaran. Sistem kendali yang program pada
Arduino ini dapat mengendalikan masukan dan keluaran secara khusus.
Perangkat lunak yang dapat mengendalikan Arduino disebabkan karena
terdapat processor Atmel (Advance Virtual RISC) AVR dan bahasa program
yang digunakan berbasis bahasa C [2].
Arduino Atmega 2560 merupakan jenis Arduino yang memerlukan
mikrokontroler Atmega 2560 berdasarkan datasheet memiliki 54 digital pin
masukan atau keluaran (dimana 15 pin dapat digunakan sebagai masukan

17
PWM atau Pulse Width Modulation), 16 analog masukan, 4 UART
(Universal Asynchronous Receiver/Transmitter), osilator cristal 16 MHz,
koneksi USB, jack listrik, headr ICSP (In-Circuit Serial Programing), dan
tombol reset. Penghubung antara mikrontroler ke komputer memerlukan
kabel USB yang berperan sebagai adaptor AC (Alternating Current) – DC
(Direct Current) atau baterai [2].
Gambar 2.10. Arduino Atmega 2560
Arduino Mega 2560 berbeda dari semua jenis Arduino sebelumnya karena
tidak menggunakan FTDI chip drver USB-to-serial. Sebaliknya, fitur
Atmega 16U2 (Atmega 8U2 dalam board revision 1 dan revision 2)
diprogram sebagai konvertr USB-to-serial. Arduino Atmega 2560 memiliki
resistor yang terhubung ke 8U2 HWB dan ground, sehingga lebih mudah
untuk dimasukkan ke dalam mode DFU (Device Firmware Update).
Arduino Atmega 2560 memiliki fitur-fitur baru sebagai berikut:
a. Pin out 1 dan 0 adalah SDA (Serial Data) dan SCL (Serial Clock) pin
yang bersebelah dengan pin AREF (ADC Reference) dan dua pin baru
lainnya diletakkan bersebelah dengan pin reset.
b. Sirkuit reset lebih kuat.
c. Atmega 16U2 menggantikan 8U2.
18
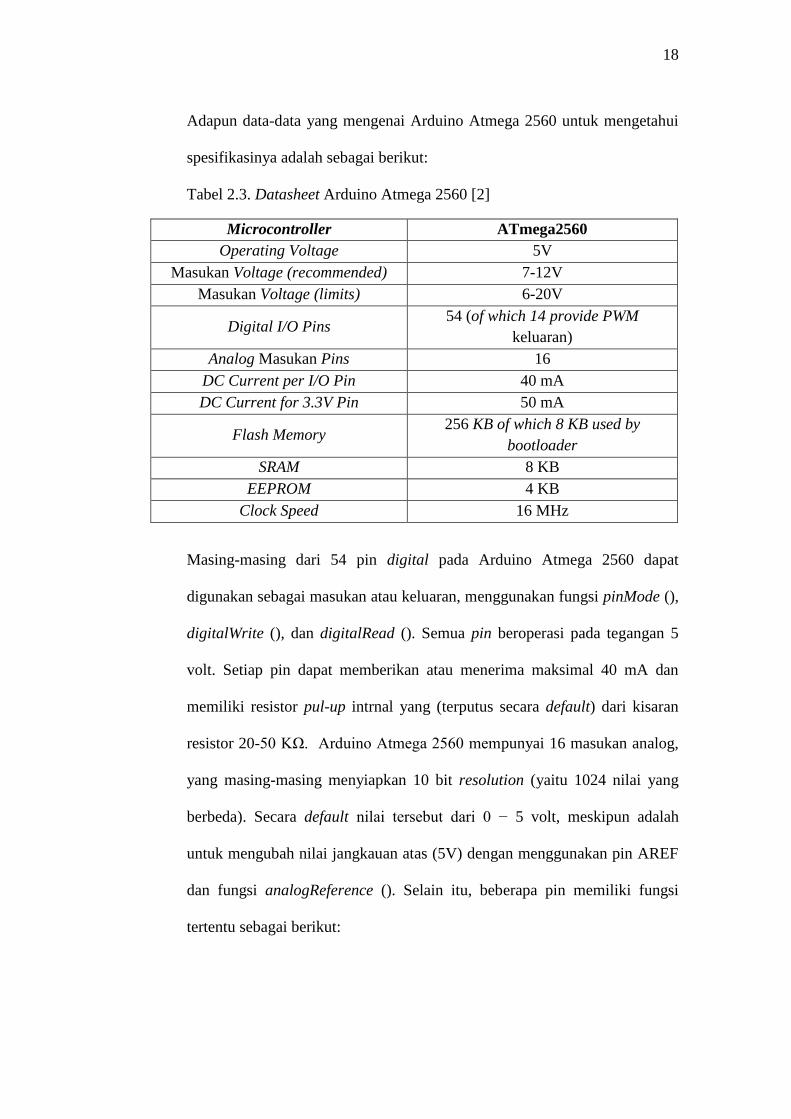
Adapun data-data yang mengenai Arduino Atmega 2560 untuk mengetahui
spesifikasinya adalah sebagai berikut:
Tabel 2.3. Datasheet Arduino Atmega 2560 [2]
Masing-masing dari 54 pin digital pada Arduino Atmega 2560 dapat
digunakan sebagai masukan atau keluaran, menggunakan fungsi pinMode (),
digitalWrite (), dan digitalRead (). Semua pin beroperasi pada tegangan 5
volt. Setiap pin dapat memberikan atau menerima maksimal 40 mA dan
memiliki resistor pul-up intrnal yang (terputus secara default) dari kisaran
resistor 20-50 KΩ. Arduino Atmega 2560 mempunyai 16 masukan analog,
yang masing-masing menyiapkan 10 bit resolution (yaitu 1024 nilai yang
berbeda). Secara default nilai tersebut dari 0 − 5 volt, meskipun adalah
untuk mengubah nilai jangkauan atas (5V) dengan menggunakan pin AREF
dan fungsi analogReference (). Selain itu, beberapa pin memiliki fungsi
tertentu sebagai berikut:
Microcontroller ATmega2560
Operating Voltage 5V
Masukan Voltage (recommended) 7-12V
Masukan Voltage (limits) 6-20V
Digital I/O Pins 54 (of which 14 provide PWM
keluaran)
Analog Masukan Pins 16
DC Current per I/O Pin 40 mA
DC Current for 3.3V Pin 50 mA
Flash Memory 256 KB of which 8 KB used by
bootloader
SRAM 8 KB
EEPROM 4 KB
Clock Speed 16 MHz
19
1. Serial: pin 0 (RX.) dan pin 1 (TX); Serial 1: pin 19 (RX) dan pin 18
(TX); Serial 2: pin 17 (RX) dan pin 16 (TX); Serial 3: pin 15 (RX) dan
pin 14 (TX). Dipergunakan untuk menerima (RX) dan mengirimkan
(TX.) TTL serial data. Pin 0 dan 1 juga terkoneksi ke pin yang sesuai
dari Atmega 16U2 USB-to-Serial TTL.
2. Perintah keluaran: pin 2 (perintah 0), pin 3 (perintah 1), pin 18 (perintah
5), pin 19 (perintah 4), pin 20 (perintah 3), dan pin 21 (perintah 2). Pin
ini dapat diatur untuk memicu perintah pada nilai yang rendah, yang
naik atau turun tepi, atau perubahan nilai. Lihat fungsi attachPerintah ()
untuk lebih rinci.
3. PWM: pin 2-13 dan pin 44-46 Memberikan 8-bit PWM keluaran dengan
fungsi analogWrite ().
4. SPI: pin 50 (MISO), pin 51 (MOSI), pin 52 (SCK), pin 53 (SS). Pin ini
mendukung komunikasi SPI. (Serial Peripheral Interface) menggunakan
library SPI. Pin SPI juga terpisah dari header ICSP, yang secara fisik
sesuai dengan Uno, Duemilanove dan Diecimila.
5. LED: pin 13 Ada built-in LED (Light Emiting Diode) terhubung ke pin
digital 13. Ketika logika pin bernilai nilai tinggi atau high, LED akan
hidup atau on, ketika logika pin rendah atau low, maka LED akan mati
atau off.
6. TWI: pin 20 (SDA) dan pin 21 (SCL). Dukungan komunikasi TWI (Two
Wire Interface) menggunakan wire library. Pin ini tidak berada di
tempat yang sama dengan pin TWI di Duemilanove atau Diecimila [2].
20
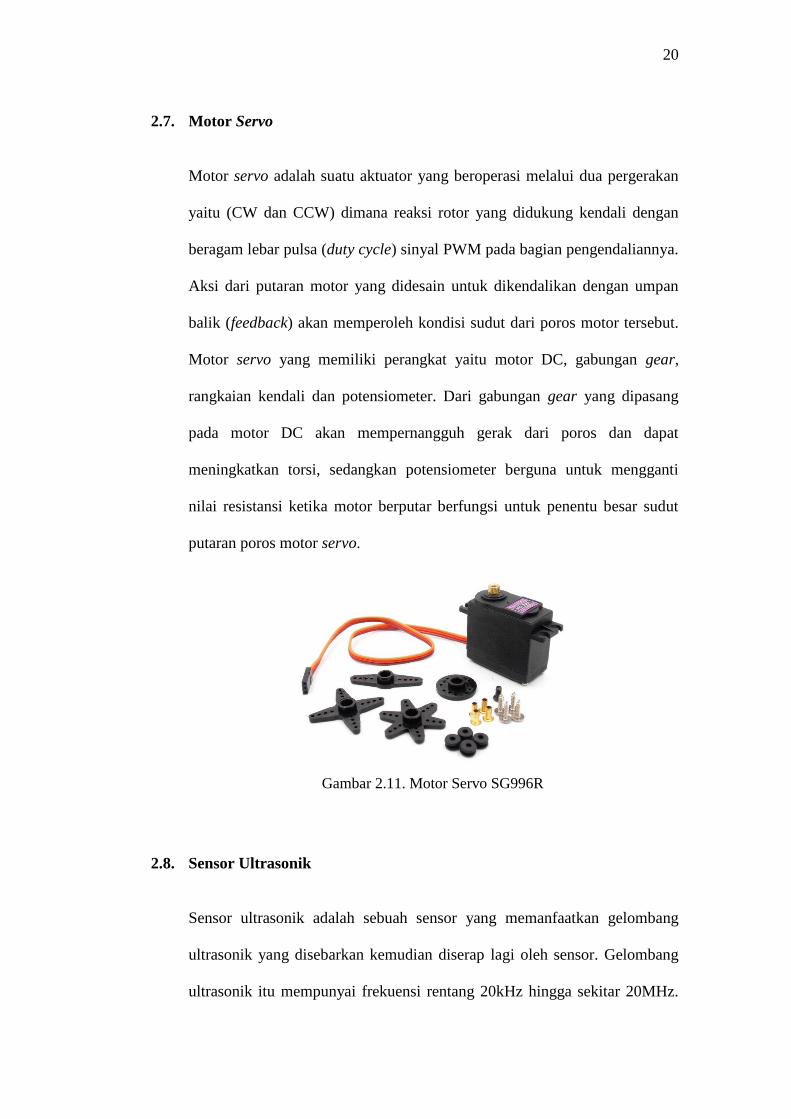
2.7. Motor Servo
Motor servo adalah suatu aktuator yang beroperasi melalui dua pergerakan
yaitu (CW dan CCW) dimana reaksi rotor yang didukung kendali dengan
beragam lebar pulsa (duty cycle) sinyal PWM pada bagian pengendaliannya.
Aksi dari putaran motor yang didesain untuk dikendalikan dengan umpan
balik (feedback) akan memperoleh kondisi sudut dari poros motor tersebut.
Motor servo yang memiliki perangkat yaitu motor DC, gabungan gear,
rangkaian kendali dan potensiometer. Dari gabungan gear yang dipasang
pada motor DC akan mempernangguh gerak dari poros dan dapat
meningkatkan torsi, sedangkan potensiometer berguna untuk mengganti
nilai resistansi ketika motor berputar berfungsi untuk penentu besar sudut
putaran poros motor servo.
Gambar 2.11. Motor Servo SG996R
2.8. Sensor Ultrasonik
Sensor ultrasonik adalah sebuah sensor yang memanfaatkan gelombang
ultrasonik yang disebarkan kemudian diserap lagi oleh sensor. Gelombang
ultrasonik itu mempunyai frekuensi rentang 20kHz hingga sekitar 20MHz.

21
Frekuensi yang bekerja akan bervariasi ketika gelombang ultrasonik melalui
berbagai media seperti kerapatan fasa gas, cair hingga padat. Pada saat
gelombang ultrasonik membentur suatu media maka gelombang tersebut
akan dipantulkan dan sebagian gelombang akan diserap oleh media.
Pembangkit gelombang ultrasonik pada sensor disebut piezoelektrik.
Piezoelektrik bekerja menciptakan gelombang ultrasonik dengan frekuensi
40kHz ketika osilator diterapkan pada benda tersebut. Sensor ultrasonik
secara umum dapat digunakan untuk pengaplikasian pengukuran jarak. Alat
ini akan menyiarkan gelombang ultrasonik kemudian akan memantul jika
menumbuk media dan kembali ke arah sensor. Sistem mengukur jarak
berdasarkan seberapa lama gelombang ultrasonik akan memantul kembali
ke arah sensor. Rangkaian penyusun pada sensor ultrasonik ini terdiri dari
transmitter, receiver dan komparator.
Gambar 2.12. Sensor Ultrasonik HC-SR04
22
BAB III
METODE PENELITIAN
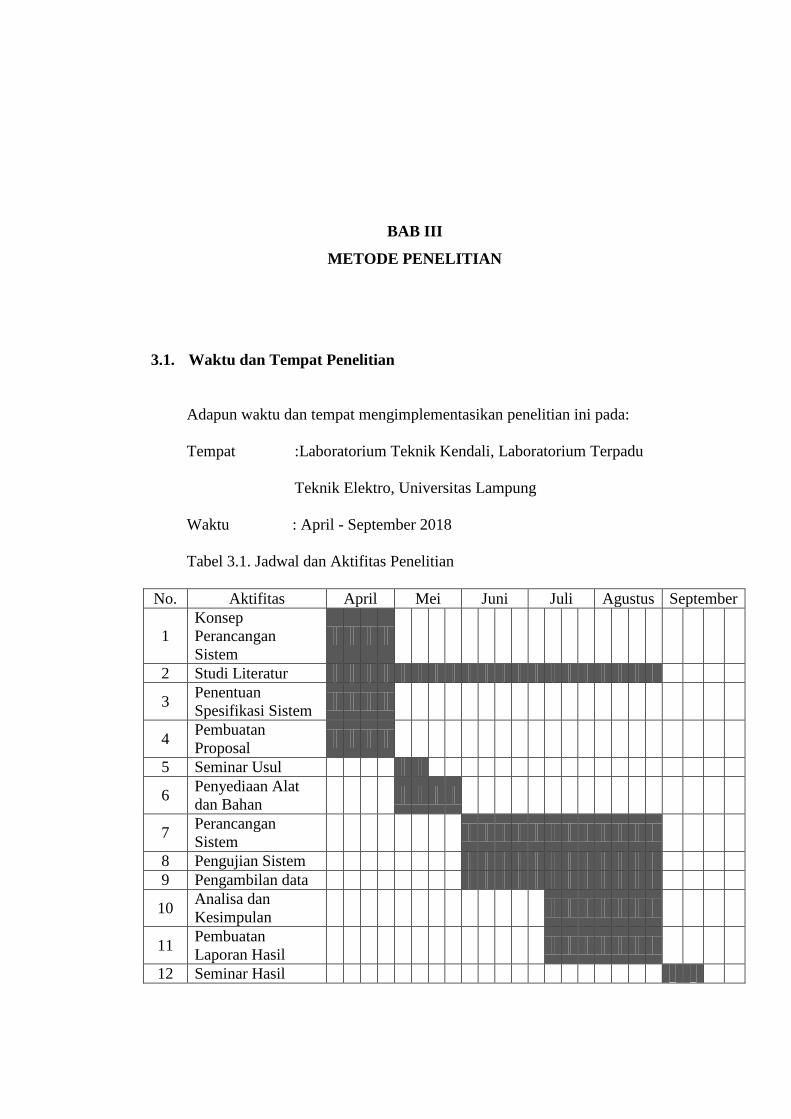
3.1. Waktu dan Tempat Penelitian
Adapun waktu dan tempat mengimplementasikan penelitian ini pada:
Tempat :Laboratorium Teknik Kendali, Laboratorium Terpadu
Teknik Elektro, Universitas Lampung
Waktu : April - September 2018
Tabel 3.1. Jadwal dan Aktifitas Penelitian
No. Aktifitas April Mei Juni Juli Agustus September
1
Konsep
Perancangan
Sistem
2 Studi Literatur
3 Penentuan
Spesifikasi Sistem
4 Pembuatan
Proposal
5 Seminar Usul
6 Penyediaan Alat
dan Bahan
7 Perancangan
Sistem
8 Pengujian Sistem
9 Pengambilan data
10 Analisa dan
Kesimpulan
11 Pembuatan
Laporan Hasil
12 Seminar Hasil
23
3.2. Alat dan Bahan
Adapun alat dan bahan yang diperlukan dalam menerapkan penelitian ini
sebagai berikut:
1. Arduino Atmega 2560
2. Sensor Ultrasonik HC-SR04
3. Motor Servo MG996R
4. Acrylic Beam (40 cm)
5. Bola Tenis Meja
6. Kabel Penghubung
7. Software Arduino IDE
3.3. Spesifikasi Alat
Spesifikasi alat yang perlu diperhatikan dari penggunaan pada penelitian
implementasi ini yaitu:
1. Menggunakan Arduino Atmega 2560 sebagai pemograman dan
pemerosesan data sistem kendali.
2. Menggunakan Sensor Ultrasonik HC-SR04 sebagai sensor pengukur
jarak pergerakan bola diatas balok.
3. Menggunakan Motor Servo MG996R sebagai aktuator yang
menggerakan balok keseimbangan yang terhubung dengan tuas
pengungkit.
24
3.4. Metode Kerja
Metode kerja yang akan dilaksanakan agar implementasi penelitian ini
berjalan dengan baik sebagai berikut:
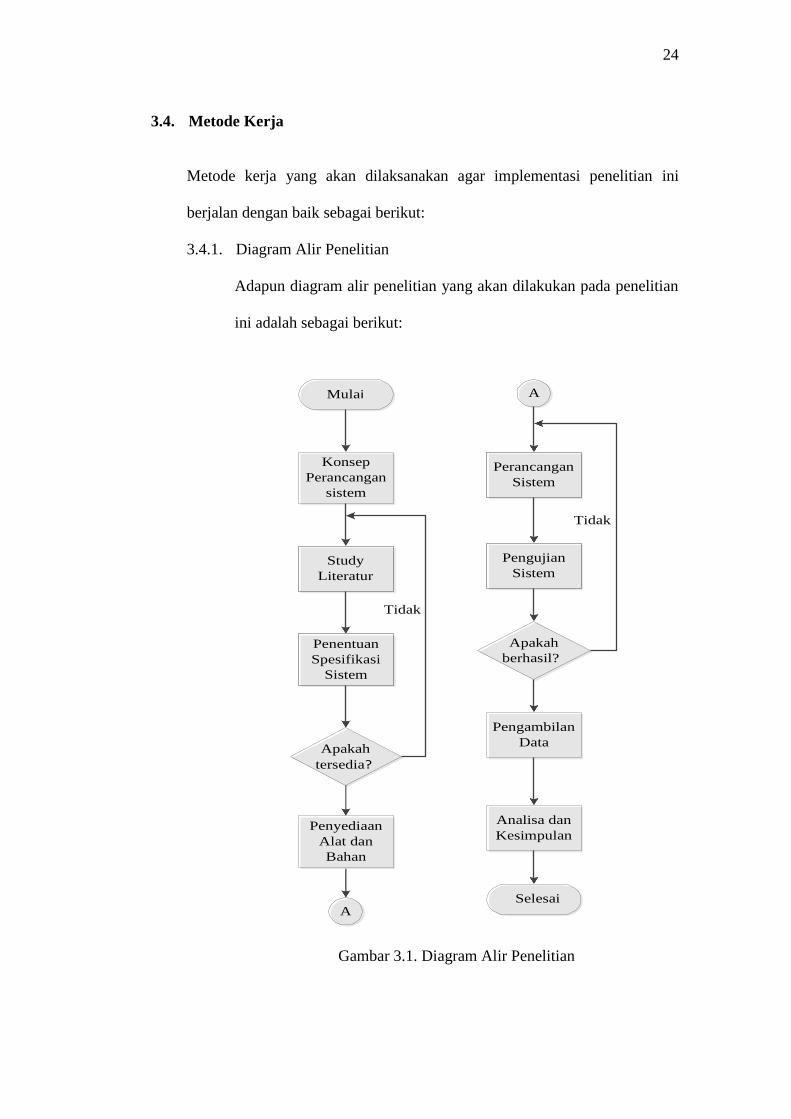
3.4.1. Diagram Alir Penelitian
Adapun diagram alir penelitian yang akan dilakukan pada penelitian
ini adalah sebagai berikut:
Gambar 3.1. Diagram Alir Penelitian
Mulai
Tidak
Apakah
tersedia?
A
Penentuan
Spesifikasi
Sistem
Study
Literatur
Konsep
Perancangan
sistem
Penyediaan
Alat dan
Bahan
A
Tidak
Apakah
berhasil?
Selesai
Analisa dan
Kesimpulan
Pengambilan
Data
Pengujian
Sistem
Perancangan
Sistem
25
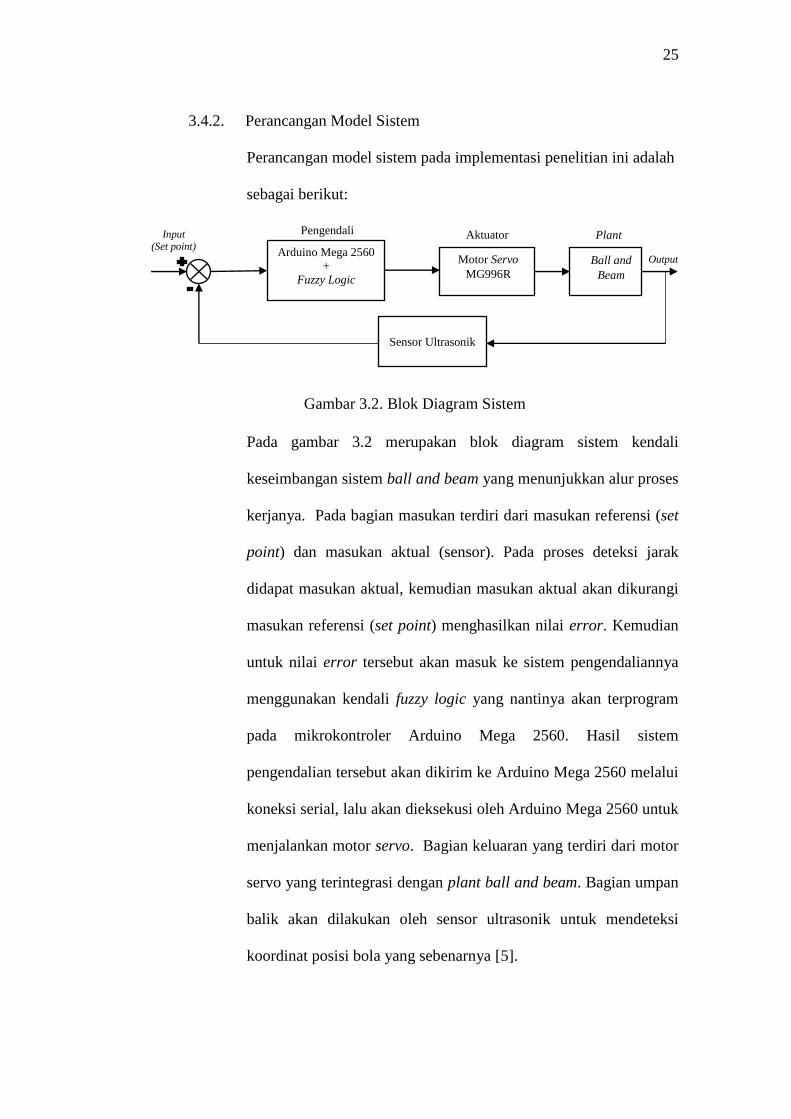
3.4.2. Perancangan Model Sistem
Perancangan model sistem pada implementasi penelitian ini adalah
sebagai berikut:
Gambar 3.2. Blok Diagram Sistem
Pada gambar 3.2 merupakan blok diagram sistem kendali
keseimbangan sistem ball and beam yang menunjukkan alur proses
kerjanya. Pada bagian masukan terdiri dari masukan referensi (set
point) dan masukan aktual (sensor). Pada proses deteksi jarak
didapat masukan aktual, kemudian masukan aktual akan dikurangi
masukan referensi (set point) menghasilkan nilai error. Kemudian
untuk nilai error tersebut akan masuk ke sistem pengendaliannya
menggunakan kendali fuzzy logic yang nantinya akan terprogram
pada mikrokontroler Arduino Mega 2560. Hasil sistem
pengendalian tersebut akan dikirim ke Arduino Mega 2560 melalui
koneksi serial, lalu akan dieksekusi oleh Arduino Mega 2560 untuk
menjalankan motor servo. Bagian keluaran yang terdiri dari motor
servo yang terintegrasi dengan plant ball and beam. Bagian umpan
balik akan dilakukan oleh sensor ultrasonik untuk mendeteksi
koordinat posisi bola yang sebenarnya [5].
Arduino Mega 2560
+
Fuzzy Logic
Motor Servo
MG996R
Ball and
Beam
Sensor Ultrasonik
Input (Set point)
Output
Pengendali Aktuator Plant
26
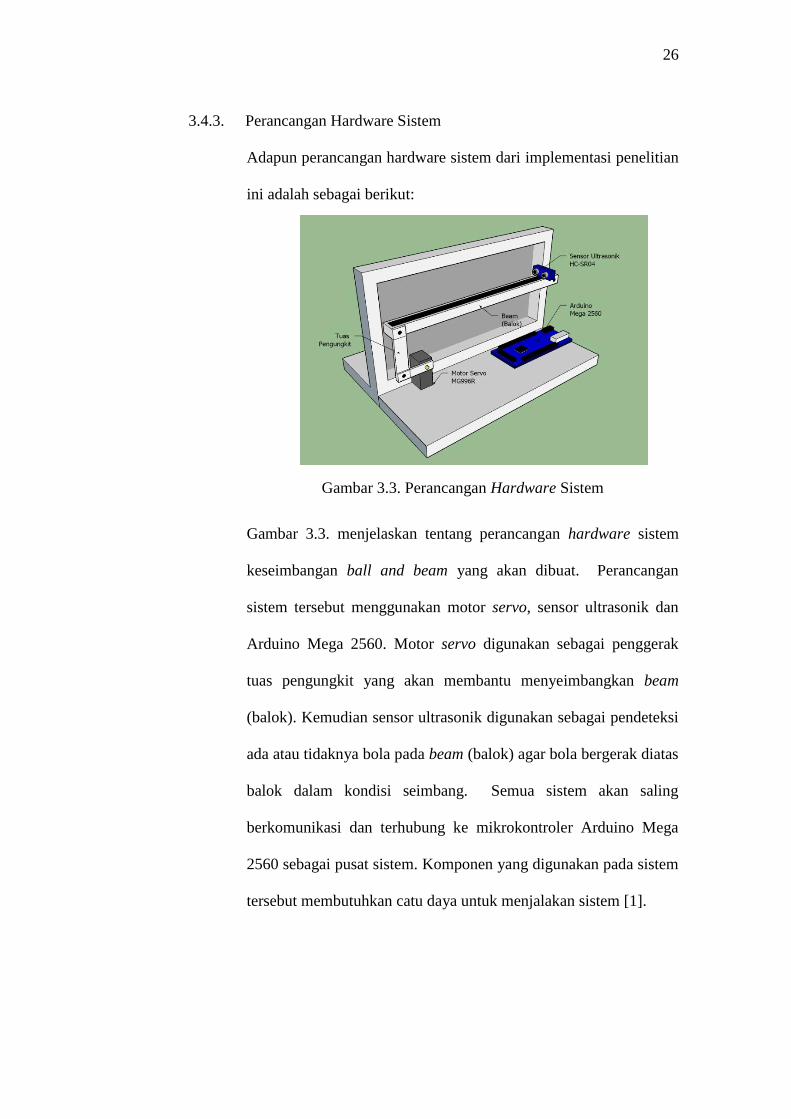
3.4.3. Perancangan Hardware Sistem
Adapun perancangan hardware sistem dari implementasi penelitian
ini adalah sebagai berikut:
Gambar 3.3. Perancangan Hardware Sistem
Gambar 3.3. menjelaskan tentang perancangan hardware sistem
keseimbangan ball and beam yang akan dibuat. Perancangan
sistem tersebut menggunakan motor servo, sensor ultrasonik dan
Arduino Mega 2560. Motor servo digunakan sebagai penggerak
tuas pengungkit yang akan membantu menyeimbangkan beam
(balok). Kemudian sensor ultrasonik digunakan sebagai pendeteksi
ada atau tidaknya bola pada beam (balok) agar bola bergerak diatas
balok dalam kondisi seimbang. Semua sistem akan saling
berkomunikasi dan terhubung ke mikrokontroler Arduino Mega
2560 sebagai pusat sistem. Komponen yang digunakan pada sistem
tersebut membutuhkan catu daya untuk menjalakan sistem [1].
27
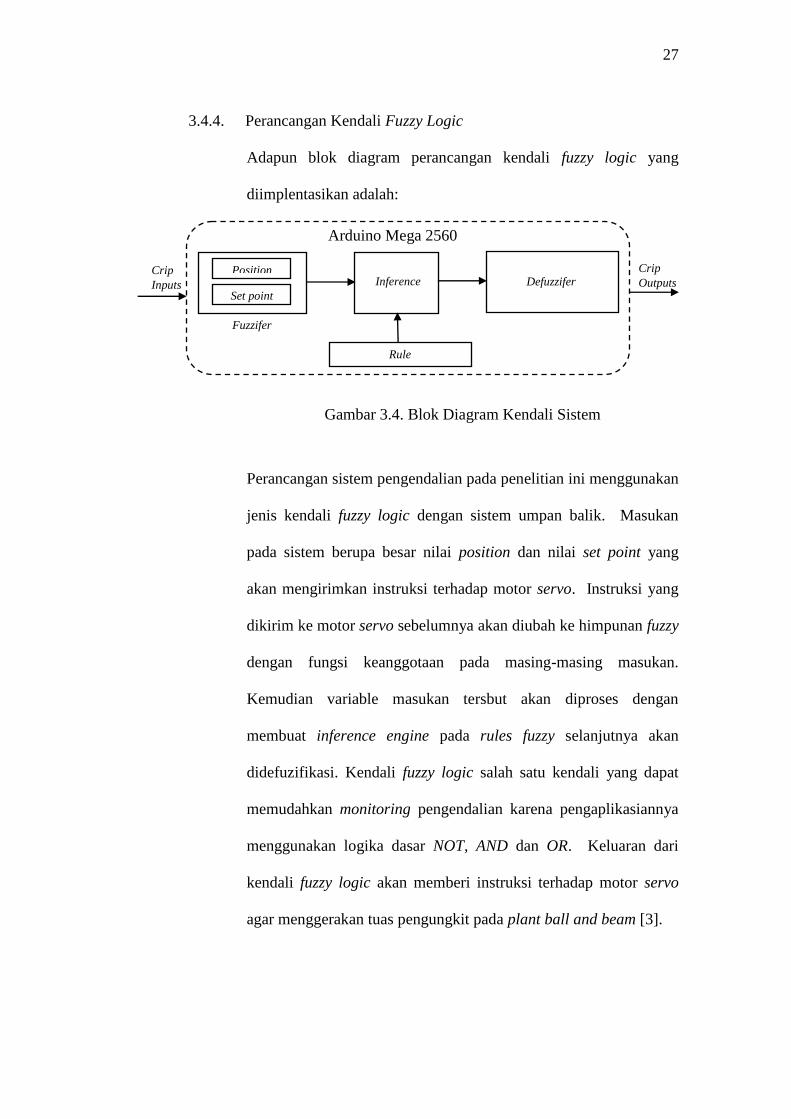
3.4.4. Perancangan Kendali Fuzzy Logic
Adapun blok diagram perancangan kendali fuzzy logic yang
diimplentasikan adalah:
Gambar 3.4. Blok Diagram Kendali Sistem
Perancangan sistem pengendalian pada penelitian ini menggunakan
jenis kendali fuzzy logic dengan sistem umpan balik. Masukan
pada sistem berupa besar nilai position dan nilai set point yang
akan mengirimkan instruksi terhadap motor servo. Instruksi yang
dikirim ke motor servo sebelumnya akan diubah ke himpunan fuzzy
dengan fungsi keanggotaan pada masing-masing masukan.
Kemudian variable masukan tersbut akan diproses dengan
membuat inference engine pada rules fuzzy selanjutnya akan
didefuzifikasi. Kendali fuzzy logic salah satu kendali yang dapat
memudahkan monitoring pengendalian karena pengaplikasiannya
menggunakan logika dasar NOT, AND dan OR. Keluaran dari
kendali fuzzy logic akan memberi instruksi terhadap motor servo
agar menggerakan tuas pengungkit pada plant ball and beam [3].
Position
Set point
Fuzzifer
Inference
Rule
Defuzzifer
Arduino Mega 2560
Crip
Inputs
Crip
Outputs
28
Adapun penentuan variable masukan pada kendali fuzzy logic
untuk mempengaruhi beban masukan sebagai berikut:
1. Nilai position merupakan hasil dari masukan ketika pembacaan
bola terdeteksi.
2. Nilai set point merupakan hasil dari masukan referensi awal
yang akan dikendalikan.
Domain dari masing-masing variabel masukan dan keluaran adalah
sebagai berikut:
a. Variable masukan position ( nilai range jangkuan 0 hingga 30)
Negative Medium (NM) = (0, 0, 3, 6)
Negative Small (NS) = (3, 6, 9, 12)
Zero (Z) = (9, 12, 15, 18)
Positive Small (PS) = (15, 18, 21, 24)
Positive Medium (PM) = (21, 24, 26, 30)
b. Variable masukan set point ( nilai range jangkuan 0 hingga 30)
Negative Medium (NM) = (0, 0, 3, 6)
Negative Small (NS) = (3, 6, 9, 12)
Zero (Z) = (9, 12, 15, 18)
Positive Small (PS) = (15, 18, 21, 24)
Positive Medium (PM) = (21, 24, 26, 30)
c. Variable keluaran theta ( nilai range jangkuan 10 hingga 175)
Negative Medium (NM) = (10, 50, 60, 80)
Negative Small (NS) = (60, 80, 90, 100)
Zero (Z) = (90, 100, 110, 120)

29
Positive Small (PS) = (110, 120, 120, 130)
Positive Medium (PM) = (130, 140, 160,175)
Aturan fuzzy didesain agar dapat beroperasi mencapai pada
kesalahan yaitu 0 % dari keadaan. Rule base fuzzy yang dibuat
dapat beroperasi ketika kondisi menaikkan atau menurunkan rasio
kesalahan. Adapun fuzzy rule base yang didesain untuk menjadikan
kendali pada sistem ini sebagai berikut:
Tabel 3.2. Fuzzy Rule Base
Rule
Input Output
(Theta) Position Set Point
1 NM NM ZO
2 NM NS NS
3 NM ZO NS
4 NM PS NS
5 NM PM NM
6 NS NM ZO
7 NS NS ZO
8 NS ZO NS
9 NS PS NS
10 NS NM NM
11 ZO NM PS
12 ZO NS PS
13 ZO ZO ZO
14 ZO PS ZO
15 ZO PM NS
16 PS NM PM
17 PS NS PS
18 PS ZO ZO
19 PS PS ZO
20 PS PM ZO
21 PM NM PM
22 PM NS PM
23 PM ZO PS
24 PM PS ZO
25 PM PM ZO
30
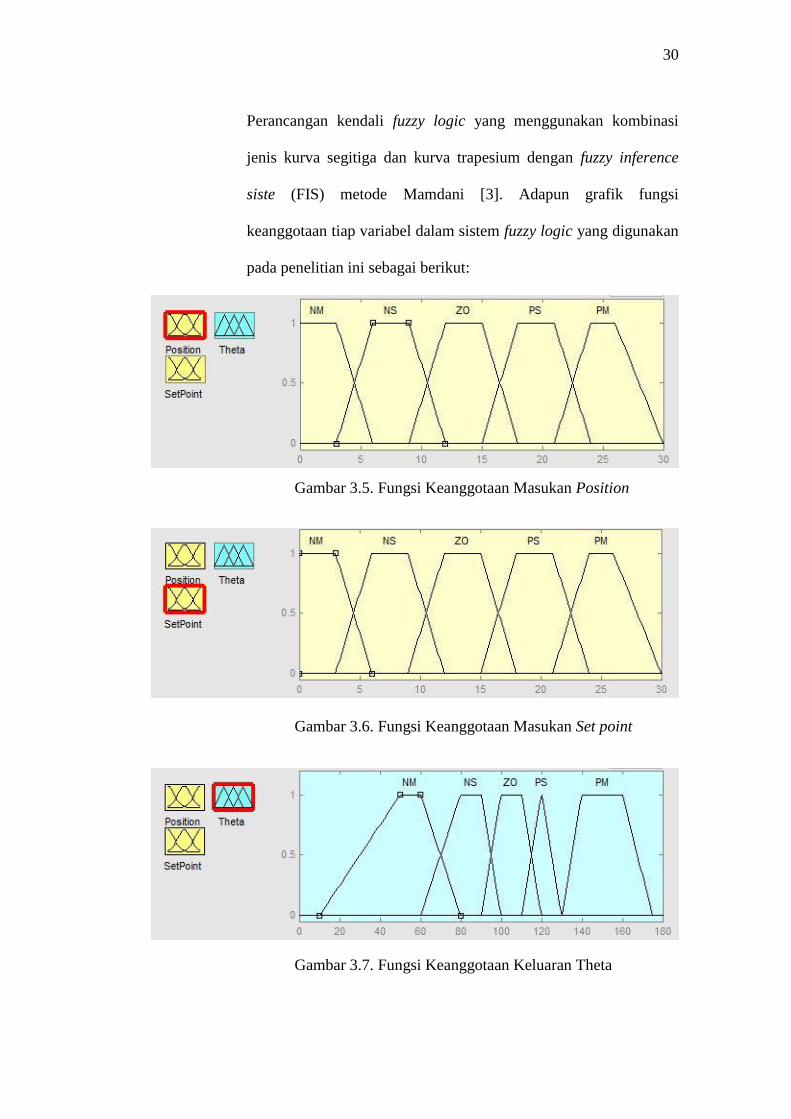
Perancangan kendali fuzzy logic yang menggunakan kombinasi
jenis kurva segitiga dan kurva trapesium dengan fuzzy inference
siste (FIS) metode Mamdani [3]. Adapun grafik fungsi
keanggotaan tiap variabel dalam sistem fuzzy logic yang digunakan
pada penelitian ini sebagai berikut:
Gambar 3.5. Fungsi Keanggotaan Masukan Position
Gambar 3.6. Fungsi Keanggotaan Masukan Set point
Gambar 3.7. Fungsi Keanggotaan Keluaran Theta
31
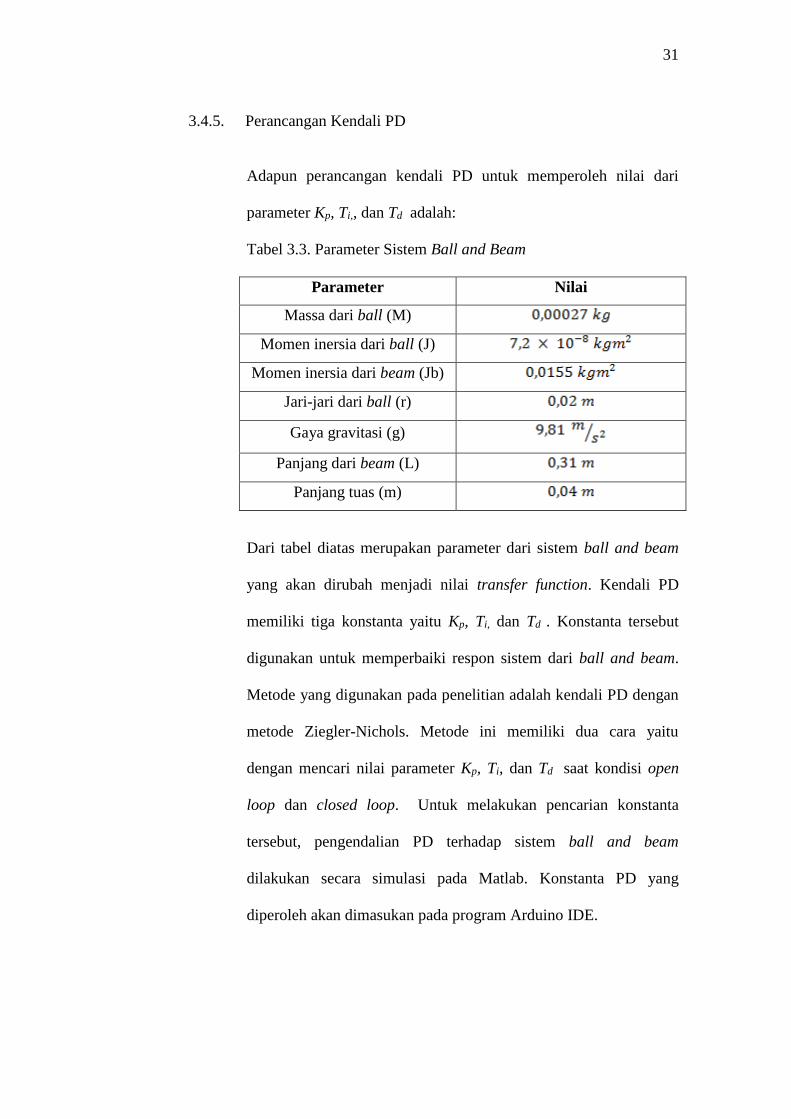
3.4.5. Perancangan Kendali PD
Adapun perancangan kendali PD untuk memperoleh nilai dari
parameter Kp, Ti,, dan Td adalah:
Tabel 3.3. Parameter Sistem Ball and Beam
Parameter Nilai
Massa dari ball (M)
Momen inersia dari ball (J)
Momen inersia dari beam (Jb)
Jari-jari dari ball (r)
Gaya gravitasi (g)
Panjang dari beam (L)
Panjang tuas (m)
Dari tabel diatas merupakan parameter dari sistem ball and beam
yang akan dirubah menjadi nilai transfer function. Kendali PD
memiliki tiga konstanta yaitu Kp, Ti, dan Td . Konstanta tersebut
digunakan untuk memperbaiki respon sistem dari ball and beam.
Metode yang digunakan pada penelitian adalah kendali PD dengan
metode Ziegler-Nichols. Metode ini memiliki dua cara yaitu
dengan mencari nilai parameter Kp, Ti, dan Td saat kondisi open
loop dan closed loop. Untuk melakukan pencarian konstanta
tersebut, pengendalian PD terhadap sistem ball and beam
dilakukan secara simulasi pada Matlab. Konstanta PD yang
diperoleh akan dimasukan pada program Arduino IDE.
32
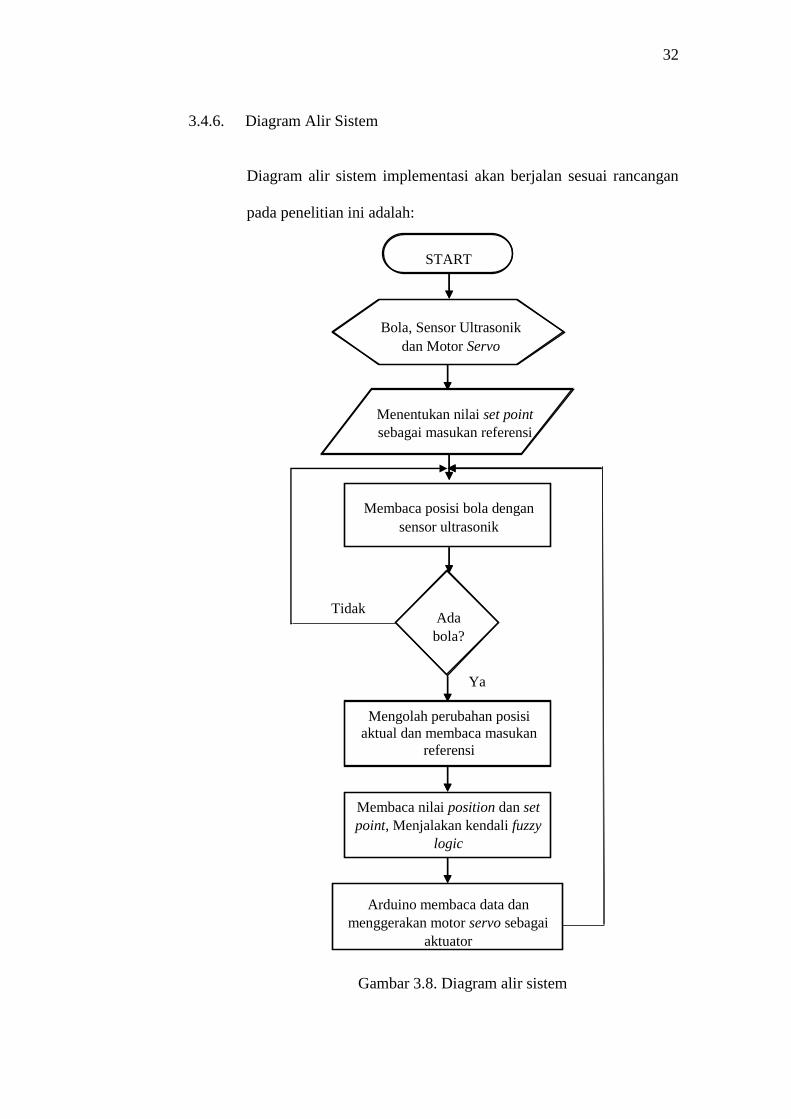
3.4.6. Diagram Alir Sistem
Diagram alir sistem implementasi akan berjalan sesuai rancangan
pada penelitian ini adalah:
Gambar 3.8. Diagram alir sistem
Membaca posisi bola dengan
sensor ultrasonik
Ada
bola?
Mengolah perubahan posisi
aktual dan membaca masukan
referensi
Membaca nilai position dan set
point, Menjalakan kendali fuzzy
logic
Arduino membaca data dan
menggerakan motor servo sebagai
aktuator
Tidak
Ya
START
Bola, Sensor Ultrasonik
dan Motor Servo
Menentukan nilai set point
sebagai masukan referensi
33
3.5. Pengujian Sistem
Pengujian sistem dilakukan bertujuan untuk mendapatkan hasil kinerja dari
sebuah sistem dan melakukan penganalisaan dari data yang diperoleh.
Pengujian ini dilakukan setelah pembuatan alat berhasil. Adapun pengujian
yang harus dilakukan pada penelitian ini sebagai berikut:
3.5.1. Pengujian Setiap Komponen
Pengujian pada tahap ini harus dilakukan dikarenakan harus
mengetahui spesifikasi komponen yang tepat agar kualitas
komponen dapat bekerja sesuai dengan sistem. Pada pengujian ini
juga melakukan pengambilan data untuk masing-masing nilai yang
digunakan pada setiap komponen untuk proses kalibrasi program.
3.5.2. Pengujian Program
Pengujian program dilakukan untuk mengetahui program yang
dirancang telah berjalan sesuai dengan sistem atau tidak. Pengujian
ini terdiri dari pengujian antara interface sistem pengendalian fuzzy
logic, sensor-sensor yang digunakan dan Arduino Mega 2560.
3.5.3. Pengujian Alat
Pada tahap ini dilakukan pengujian secara keseluruhan sistem
keseimbangan ball and beam. Pengujian ini bertujuan untuk
mengetahui dan menguji seberapa efektif dari pengendalian fuzzy
logic terhadap keseimbangan bola yang bergerak bebas pada balok
dalam waktu tertentu.
34
3.6. Pengambilan Data dan Analisis
Adapun pengambilan data yang harus diambil dan dilakukan penganalisaan
dari implemaentasi penelitian ini adalah:
3.6.1. Data Posisi Bola
Data menggunakan posisi bola akan diatur sebagai sinyal masukan
berupa set point. Sinyal masukan tersebut merupakan data masukan
dari data tegas menjadi fuzzy. Data tersebut akan ditampilkan dalam
bentuk himpunan fuzzy dengan fungsi keanggotan. Data ini akan
diolah dan nantinya akan digunakan untuk menggerakkan motor
servo.
3.6.2. Data Sensor Ultrasonik
Data tersebut digunakan untuk menentukan jarak posisi bola saat
kondisi seimbang pada balok yang akan dibandingkan dengan
variable waktu agar dapat menganalisa respon sistemnya.
3.6.3. Data Respon Sistem
Data respon sistem adalah perubahan sinyal keluaran terhadap
perubahan sinyal masukan. Respon sistem ini akan dianalisa
karakteristik sistemnya yang menggunakan persamaan/model
matematika. Bentuk kurva respon sistem dapat terlihat setelah
diberikan sinyal masukan. Sinyal awal masukan tersebut berguna
untuk melihat karakteristik sistem.
Data-data diatas diambil untuk menguji hasil perancangan sistem dapat
berjalan dengan efisien. Pengambilan data tersebut akan memperoleh
35
respon sistem yang akan dianalisa agar sistem dikatakan dalam kondisi
stabil atau tidak.
3.7. Penulisan Laporan
Tahapan ini merupakan tahapan semua kegiatan penelitian ini dilakukan
yang meliputi prinsip kerja, tahapan penelitian, metode yang digunakan,
pengambilan data, dan pemaparan hasil penelitian yang diperoleh sehingga
dapat dibukukan menjadi sebuah laporan. Dari semua data yang didapat
dari hasil penelitian tersebut akan dianalisa dan diambil kesimpulan.
57
BAB V
KESIMPULAN DAN SARAN
Penelitian yang telah dilakukan menghasilkan kesimpulan dan saran setelah
melakukan pembahasan dan analisa data. Kesimpulan dan saran ini diharapkan
dapat menjadi referensi untuk mengembangan penelitian ini lebih lanjut.
5.1. Kesimpulan
Adapun kesimpulan yang dihasilkan dari penelitian ini adalah sebagai
berikut:
1. Penggunaan kendali fuzzy logic mampu untuk melakukan pengendalian
pada sistem ball and beam yang merupakan sistem non linier.
2. Kendali fuzzy logic mimiliki waktu risetime lebih cepat dibandingkan
kendali PD, namun masih memiliki nilai overshoot.
3. Pengujian sistem kendali fuzzy logic pada sistem keseimbangan ball and
beam memiliki respon yang baik dengan waktu lebih cepat dibandingkan
kendali PD.
4. Penggunaan sensor ultrasonik memiliki kekurangan dalam pembacaan
data yang kurang halus.
5. Pengujian kendali fuzzy logic menggunakan aturan-aturan yang lebih
banyak cukup mampu memperbaiki respon sistem dari sisi menjaga
koreksi error steady state.
58
5.2. Saran
Setelah melakukan penelitian dan menghasilkan kesimpulan, maka untuk
pengembangan sistem untuk lebih lanjut disarankan:
1. Pengujian dapat dikembangan dengan mengubah jenis metode kendali
fuzzy logic seperti metode Sugeno atau metode Tsukamoto agar dapat
membandingkan dengan sistem kendali sebelumnya.
2. Penambahan atau penggantian sensor dengan jenis lain seperti sensor
sudut dan modul kamera agar pembacaan bola lebih presisi.
58
DAFTAR PUSTAKA
[1] Ali, A. Taifour dkk,. 2017. Design and Implementation of Ball and Beam
System Using PID Controller. Sudan: Sudan University of Science and
Technology.
[2] Arduino. 2017. Sekilas mengenai datasheet Arduino Atmega 2560.
https://www.arduino.cc/en/Main/arduinoBoardMega2560/, 17 Maret 2018.
[3] Houshyar Asadi, Arash Mohammadi and Maysam Oladazimi. 2015.
“Stabilization Ball and Beam by Fuzzy Logic Control Strategy”. Malaysia:
Electrical and Biomedical Engineering Students, University of Malaya.
[4] J. Hauser, S. Sastry and P. Kokotovic, “Nonlinear control via approximate
input-output linearization: ball and beam example”, IEEE Transaction on
Automatic Control, Vol.37, 1992.
[5] Muhammad, Hindami. 2017. Desain dan Impelementasi Kendali PID Pada
Beam And Ball System. Bandung: Prodi S1 Teknik Elektro, Fakultas
Teknik Elektro, Universitas Telkom.
[6] Muslimin, M. W. . 2011. Perancangan dan Pembuatan Plant Ball and
Beam. Semarang: Prodi S1 Teknik Elektro, Fakultas Teknik Elektro,
Universitas Diponogoro.
[7] Ogata, Katsuhiko. 2010. Modern Control Engineering fifth edition. New
York: PrenticeHall,Inc.
[8] Sarwono, Cristian. 2007. Perancangan Program Pengambilan Keputusan
Dengan Menggunakan Fuzzy Query Database. Undergraduate Thesis,
BINUS.
[9] Subrata, Rosalia H dan Richard R. Ligianto. 2015. Pengendalian
Keseimbangan Ball and Plate Menggunakan Pengendali PID Dan
Pengolahan Citra Digital. Jakarta: Universitas Kristen Maranatha.
[10] Sulistiyanti, Sri Ratna dan FX. Arinto Setyawan. 2006. Dasar Sistem
Kendali (ELT 307). Bandarlampung: Universitas Lampung.

59
[11] Thiang, Jaury Adi Wijaya, Anies Hannawati , Resmana Lim. 2000. Kendali
Logika Fuzzy Pada Sistem Batang Penyeimbang Bola. Surabaya: Jurusan
Teknik Elektro, Universitas Kristen Petra.
[12] Virseda, Marta. 2004. Modeling and Control of the Ball and Beam Process.
Master Thesis, Sweden: Department of Automatic Control Lund Institute
of Technology.
[13] Wijaya, Else Orlanda Merti dan Bambang Suprianto. 2018. Perancangan
Sistem Keseimbangan Ball and Beam Dengan Menggunakan Pengendali
PID Berbasis Arduino Uno. Surabaya: Prodi S1 Teknik Elektro, Fakultas
Teknik Elektro, Universitas Negeri Surabaya.