iir filters chapter
TRANSCRIPT
er
IIR FiltersIn this chapter we finally study the general infiniteimpulse response (IIR) difference equation that was men-tioned back in Chapter 5. The filters will now include both feed-back and feedforward terms. The system function will be arational function where in general both the zeros and the polesare at nonzero locations in the z-plane.The General IIR Difference Equation
• The general IIR difference equation described in Chapter 5was of the form
(8.1)
• In this chapter the text rearranges this equation so that ison the left and all of the other terms are on the right
(8.2)
• In so doing notice the sign change of the coefficients,and also we assume that
• The total coefficient count is , meaning that thismany multiplies are needed to compute each new output fromthe difference equation
al y n l– l 0=
N
bk x n k– k 0=
M
=
y n
y n al y n l– l 1=
N
bk x n k– k 0=
M
+=
al a0 1=
N M 1+ +
Chapt
8
ECE 2610 Signal and Systems 8–1
Time-Domain Response
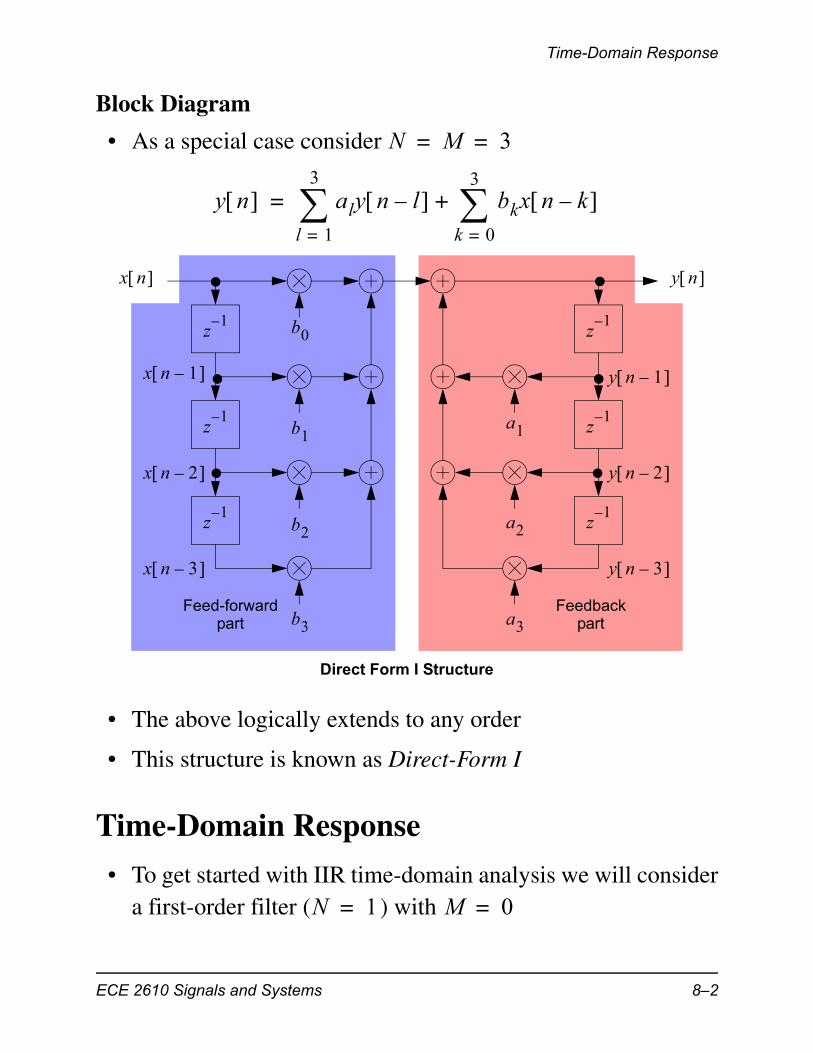
Block Diagram
• As a special case consider
• The above logically extends to any order
• This structure is known as Direct-Form I
Time-Domain Response
• To get started with IIR time-domain analysis we will considera first-order filter ( ) with
N M 3= =
y n aly n l– l 1=
3
bkx n k– k 0=
3
+=
y n x n
z1–
z1–
z1–
z1–
z1–
z1–
y n 1–
y n 2–
y n 3–
x n 1–
x n 2–
x n 3–
b0
b1
b2
b3
a1
a2
a3Feed-forward
partFeedback
part
Direct Form I Structure
N 1= M 0=
ECE 2610 Signals and Systems 8–2
Time-Domain Response
(8.3)
Impulse Response of a First-Order IIR System
• The impulse response can be obtained by setting and insuring that the system is initially at rest
• Definition: Initial rest conditions for an IIR filter means that:
– (1) The input is zero prior to the start time , that is for
– (2) The output is zero prior to the start time, that is for
• We now proceed to find the impulse response of (8.3) viadirect recursion of the difference equation
• In summary we have shown that the impulse response of a1st-order IIR filter is
(8.4)
where the unit step has been utilized to make it clearthat the output is zero for
y n a1y n 1– b0x n +=
x n n =
n0x n 0= n n0
y n 0= n n0
y 0 a1y 1– b0 0 + b0= =
y 1 a1y 0 b0 1 + a1b0= =
y 2 a1y 1 b0 2 + a12b0= =
y n a1nb0 n 0=
0
0
0
h n b0 a1 nu n =
u n n 0
ECE 2610 Signals and Systems 8–3
Time-Domain Response
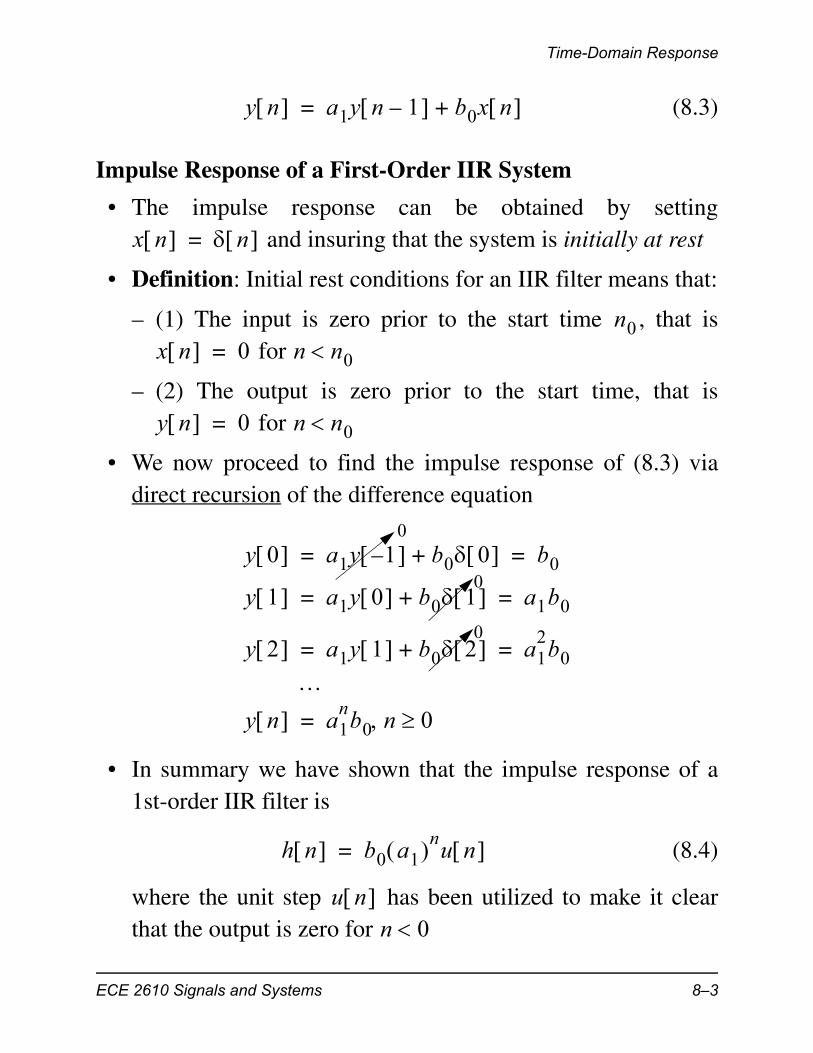
Example: First-Order IIR with
• The impulse response is
Linearity and Time Invariance of IIR Filters
• Recall that in Chapter 5 the definitions of time invariance andlinearity were introduced and shown to hold for FIR filters
• It can be shown that the general IIR difference equation alsoexhibits linearity and time invariance
• Using linearity and time invariance we can find the output ofthe first-order system to a linear combination of time shiftedimpulses
(8.5)
• From the impulse response of (8.4)
b0 1 a1 0.8= =
h n 0.8nu n =
5 10 15 20n
0.2
0.4
0.6
0.8
1First�Order IIR a1�0.8, b0�1
h n
x n x k n k– k N1=
N2
=
ECE 2610 Signals and Systems 8–4
Time-Domain Response
(8.6)
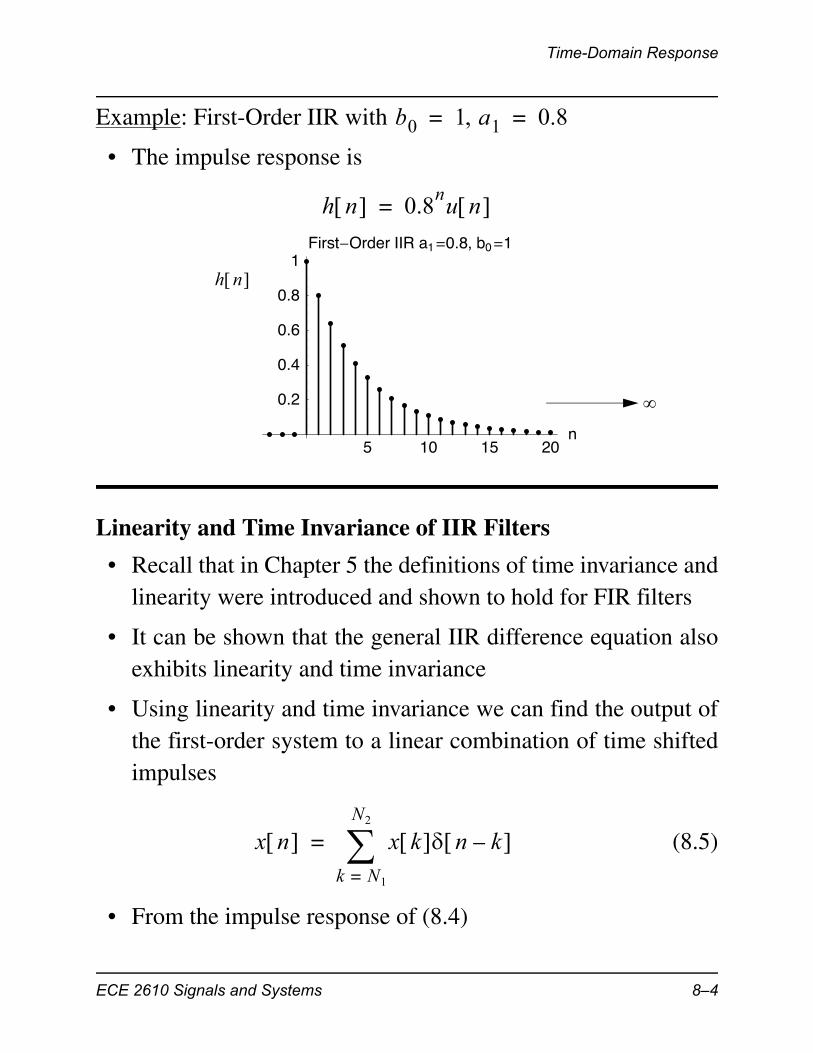
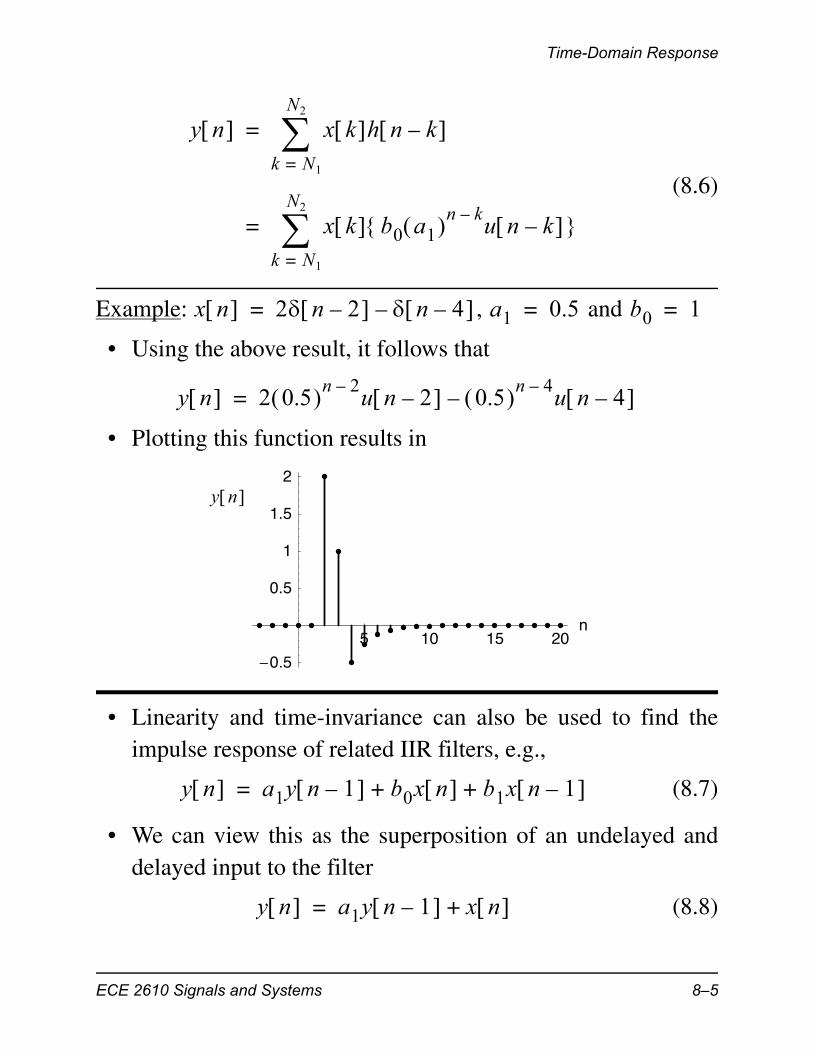
Example: , and
• Using the above result, it follows that
• Plotting this function results in
• Linearity and time-invariance can also be used to find theimpulse response of related IIR filters, e.g.,
(8.7)
• We can view this as the superposition of an undelayed anddelayed input to the filter
(8.8)
y n x k h n k– k N1=
N2
=
x k b0 a1 n k–u n k–
k N1=
N2
=
x n 2 n 2– n 4– –= a1 0.5= b0 1=
y n 2 0.5 n 2–u n 2– 0.5 n 4–
u n 4– –=
5 10 15 20n
�0.5
0.5
1
1.5
2y n
y n a1y n 1– b0x n b1x n 1– + +=
y n a1y n 1– x n +=
ECE 2610 Signals and Systems 8–5
Time-Domain Response
• Based on this observation, the impulse response is
(8.9)
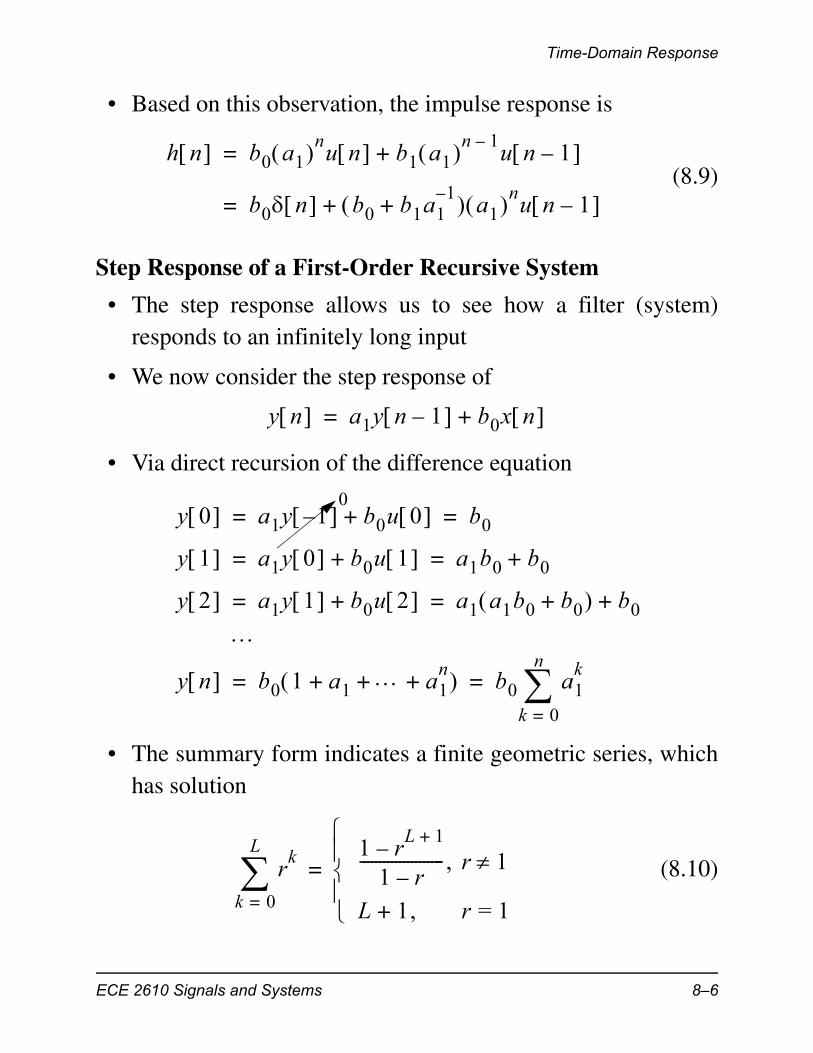
Step Response of a First-Order Recursive System
• The step response allows us to see how a filter (system)responds to an infinitely long input
• We now consider the step response of
• Via direct recursion of the difference equation
• The summary form indicates a finite geometric series, whichhas solution
(8.10)
h n b0 a1 nu n b1 a1 n 1–u n 1– +=
b0 n b0 b1a11–
+ a1 nu n 1– +=
y n a1y n 1– b0x n +=
y 0 a1y 1– b0u 0 + b0= =
y 1 a1y 0 b0u 1 + a1b0 b0+= =
y 2 a1y 1 b0u 2 + a1 a1b0 b0+ b0+= =
y n b0 1 a1 a1
n+ + + b0 a1
k
k 0=
n
= =
0
rk
k 0=
L
1 r
L 1+–1 r–
--------------------- , r 1
L 1,+ r = 1
=
ECE 2610 Signals and Systems 8–6

Time-Domain Response
• Using (8.10) and assuming that , the step response ofthe first-order filter is
(8.11)
• Three conditions for exist
1. When the term grows without bound as n
becomes large, resulting in an unstable condition
2. When the term decays to zero as ,
and we have a stable condition3. When we have the special case output of (8.10)
where the output is of the form , which also
grows without bound; with the output alternates
sign, hence we have a marginally stable condition
Example: and
• The step response of this filter is
a1 1
y n b0
1 a1n 1+
–
1 a1–---------------------u n =
a1
a1 1 a1n 1+
a1 1 a1n 1+
n
a1 1=
b0 n 1+
a1 1–=
a1 0.6 b0 1= = x n u n =
y n 1 0.6 n 1+–1 0.6–
-------------------------------u n =
ECE 2610 Signals and Systems 8–7
Time-Domain Response
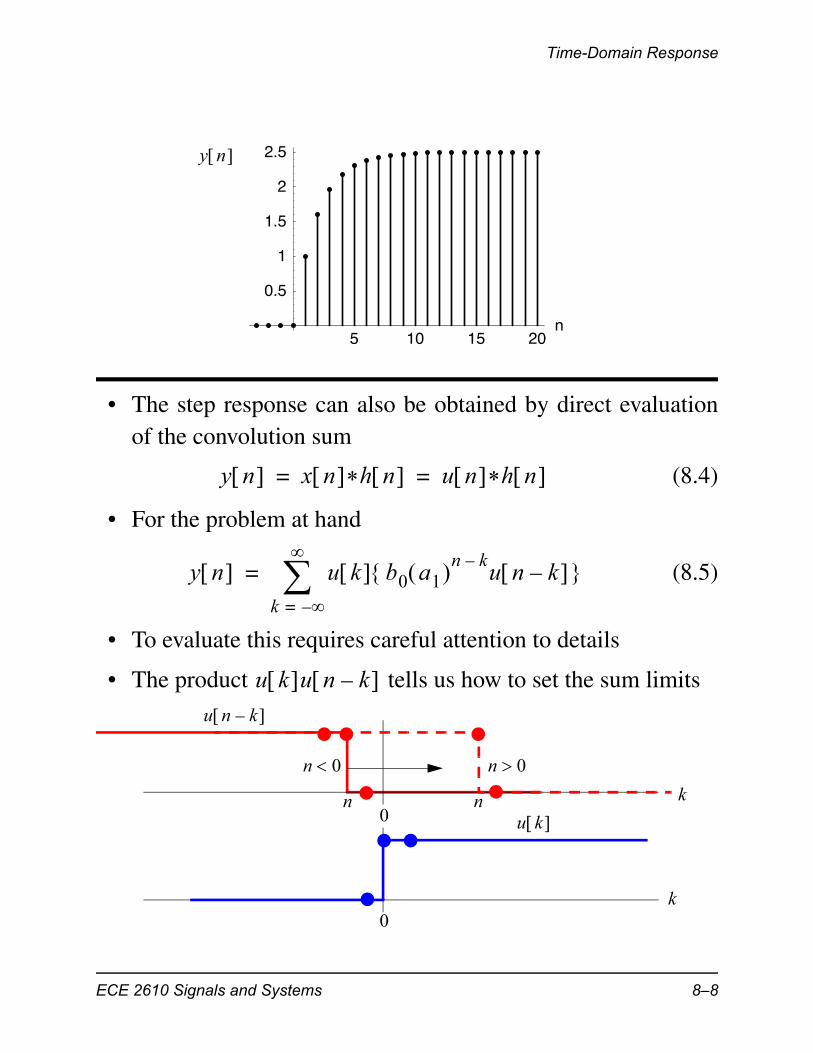
• The step response can also be obtained by direct evaluationof the convolution sum
(8.4)
• For the problem at hand
(8.5)
• To evaluate this requires careful attention to details
• The product tells us how to set the sum limits
5 10 15 20n
0.5
1
1.5
2
2.5y n
y n x n *h n u n *h n = =
y n u k b0 a1 n k–u n k–
k –=
=
u k u n k–
k
k
n 0
0
0
u n k–
u k
n 0
n n
ECE 2610 Signals and Systems 8–8
System Function of an IIR Filter
• The result is
(8.6)
which is the same result obtained by the direct recursion
System Function of an IIR Filter
• From our study of the z-transform we know that convolutionin the time (sequence)-domain corresponds to multiplicationin the z-domain
• For the case of IIR filters will be a fully rational func-tion, meaning in general both poles and zeros (more than at
)
• Begin by z-transforming both sides of the general IIR differ-ence equation using the delay property
y n b0 a1 n k–
k 0=
n
u n =
b0 a1 n a1 k–
k 0=
n
=
b0 a1 n1 1 a1 n 1+
–
1 1 a1 –------------------------------------=
b0
1 a1 n 1+–
1 a1 –-----------------------------=
y n x n *h n = X z H z Y z =z
H z
z 0=
ECE 2610 Signals and Systems 8–9
System Function of an IIR Filter
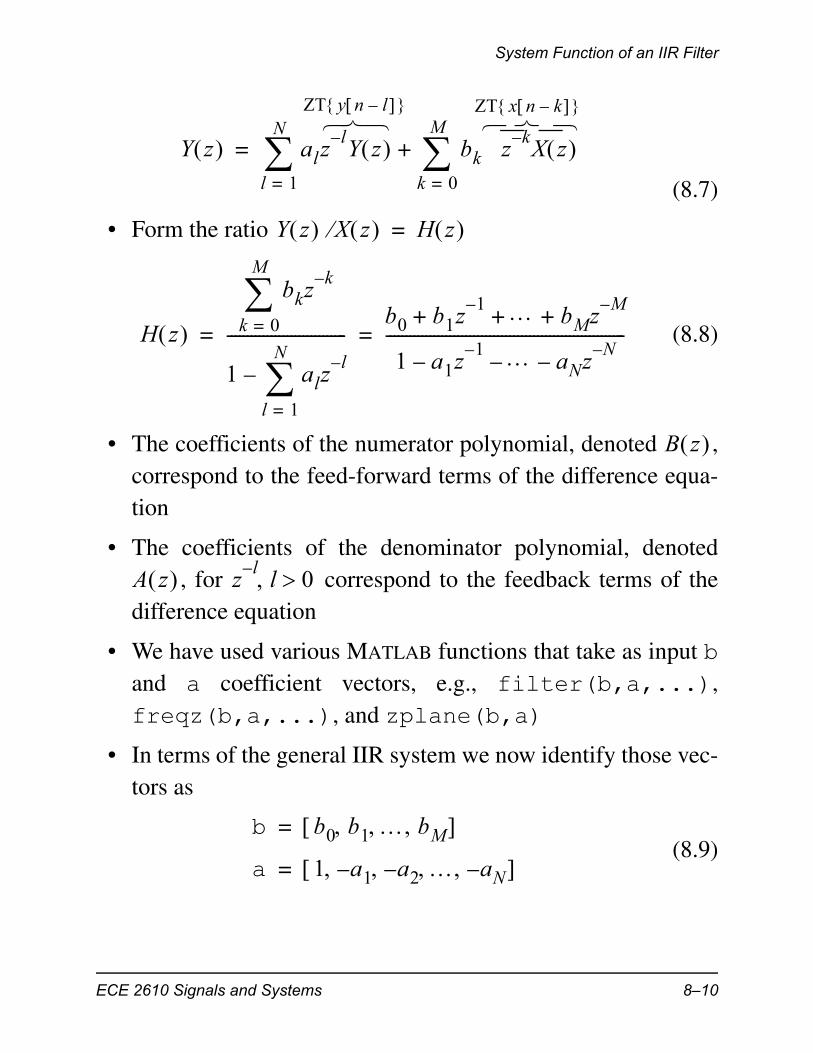
(8.7)
• Form the ratio
(8.8)
• The coefficients of the numerator polynomial, denoted ,correspond to the feed-forward terms of the difference equa-tion
• The coefficients of the denominator polynomial, denoted, for correspond to the feedback terms of the
difference equation
• We have used various MATLAB functions that take as input band a coefficient vectors, e.g., filter(b,a,...),freqz(b,a,...), and zplane(b,a)
• In terms of the general IIR system we now identify those vec-tors as
(8.9)
Y z alzl–Y z
l 1=
N
bk zk–X z
k 0=
M
+=
ZT y n l– ZT x n k–
Y z X z H z =
H z
bkzk–
k 0=
M
1 alzl–
l 1=
N
–
------------------------------b0 b1z
1– bMzM–
+ + +
1 a1z1–
– aNzN–
––------------------------------------------------------------= =
B z
A z zl–l 0
b b0 b1 bM =
a 1 a1 a2– aN– – =
ECE 2610 Signals and Systems 8–10
System Function of an IIR Filter
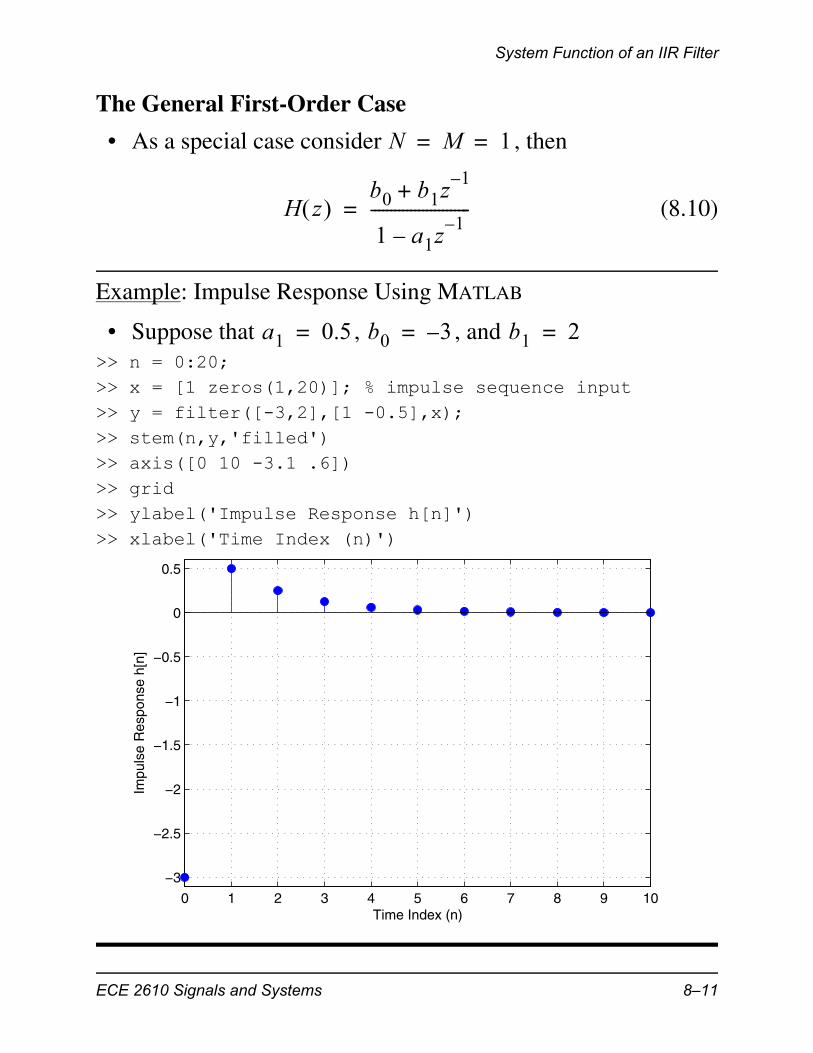
The General First-Order Case
• As a special case consider , then
(8.10)
Example: Impulse Response Using MATLAB
• Suppose that , , and >> n = 0:20;>> x = [1 zeros(1,20)]; % impulse sequence input>> y = filter([-3,2],[1 -0.5],x);>> stem(n,y,'filled')>> axis([0 10 -3.1 .6])>> grid>> ylabel('Impulse Response h[n]')>> xlabel('Time Index (n)')
N M 1= =
H z b0 b1z
1–+
1 a1z1–
–-------------------------=
a1 0.5= b0 3–= b1 2=
0 1 2 3 4 5 6 7 8 9 10
−3
−2.5
−2
−1.5
−1
−0.5
0
0.5
Impu
lse
Res
pons
e h[
n]
Time Index (n)
ECE 2610 Signals and Systems 8–11
System Function of an IIR Filter
Example: y = filter([1 1],[1 -0.8],x)
• We wish to find the system function, impulse response, anddifference equation that corresponds to the given filter()expression
• By inspection
• The impulse response using page 8–5, eqns (8.7)—(8.9)
• The difference equation is
System Functions and Block-Diagram Structures
• We have already examined the Direct-Form I structure (p. 8–2)
• The Direct-Form I structure implements the feed-forwardterms first followed by the feedback terms
• We can view this as a cascade of two systems, which due tolinearity can also be written as
(8.11)
• In the block diagram this is represented as
H z 1 z1–
+
1 0.8z1–
–------------------------=
h n n 1 0.81–
+ 0.8 nu n 1– +=
y n 0.8y n 1– x n x n 1– + +=
H z B z 1A z ----------- 1
A z ----------- B z = =
ECE 2610 Signals and Systems 8–12
System Function of an IIR Filter
y n x n
z1–
z1–
z1–
z1–
z1–
z1–
w n 1–
w n 2–
w n 3–
b0
b1
b2
b3
a1
a2
a3
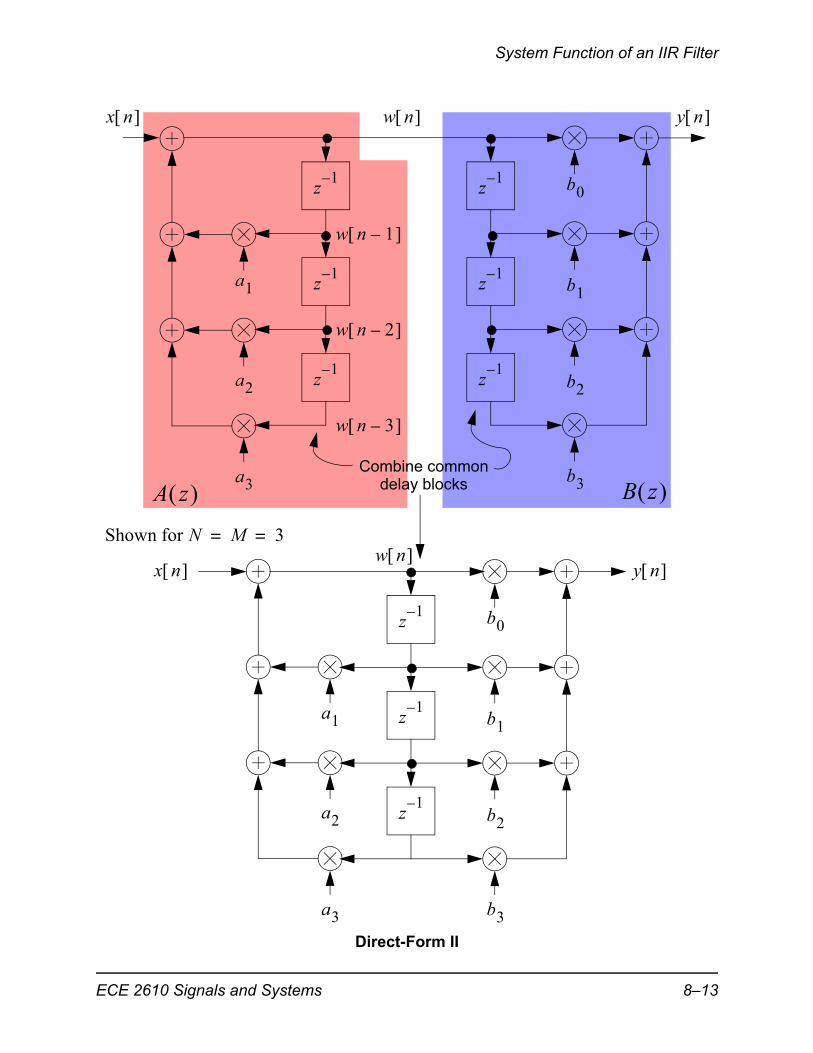
w n
Combine commondelay blocks
z1–
z1–
z1–
b0
b1
b2
b3
a1
a2
a3
x n y n
Direct-Form II
w n
A z B z
Shown for N M 3= =
ECE 2610 Signals and Systems 8–13
System Function of an IIR Filter
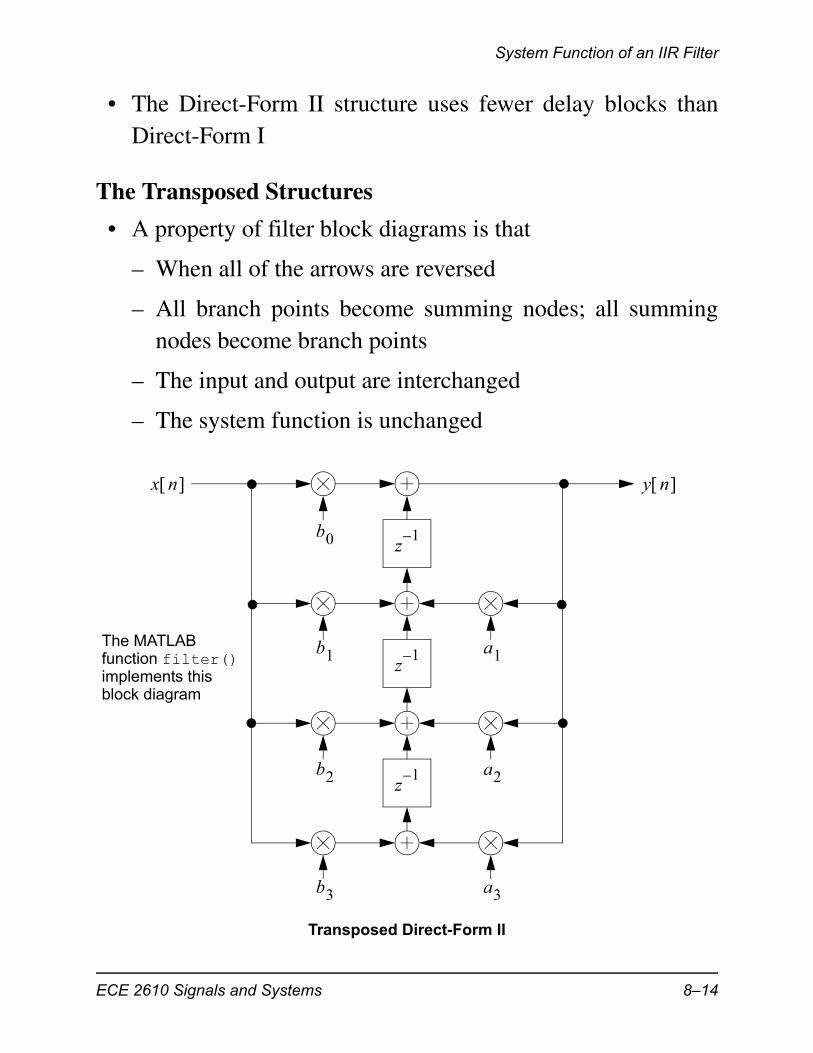
• The Direct-Form II structure uses fewer delay blocks thanDirect-Form I
The Transposed Structures
• A property of filter block diagrams is that
– When all of the arrows are reversed
– All branch points become summing nodes; all summingnodes become branch points
– The input and output are interchanged
– The system function is unchanged
b1
b2
b3
z1–
z1–
z1–
a1
a2
a3
b0
x n y n
Transposed Direct-Form II
The MATLABfunction filter()implements thisblock diagram
ECE 2610 Signals and Systems 8–14
System Function of an IIR Filter
Relation to the Impulse Response
• From Chapter 7 we know that the impulse response and sys-tem function are related via the z-transform
• For IIR systems more work is required to obtain the z-trans-form
• Consider , where we have learnedthat the impulse response is
• From the definition of the z-transform,
(8.12)
• The sum of (8.12) is an infinite geometric series which ingeneral terms is
• Applying the sum formula to (8.12) results in
(8.13)
– The condition that tells us that the z-transformonly exists for these values of z
– The z-plane region is known as the region of convergence
• We have thus established the following z-transform relation-
y n ay n 1– x n +=
h n anu n =
H z anzn–
n 0=
az1– n
n 0=
= =
S rn
n 0=
11 r–----------- r 1= =
H z az1– n
n 0=
1
1 az1–
–------------------- z a= =
z a
ECE 2610 Signals and Systems 8–15
Poles and Zeros
ship
(8.14)
• We can use this result to find the z-transform of
(8.15)
directly using just linearity and the delay property
• We will learn later that we can work this operation in reverse,and when combined with partial fraction expansion, we willbe able to find the inverse z-transform of almost any rational
Poles and Zeros
• Factoring the numerator denominator polynomials allows usto discover the poles and zeros of
• For the case of a first-order system only algebra is needed
anu n 1
1 az1–
–-------------------
z
h n b0 a1 nu n b1 a1 n 1–u n 1– +=
H z b01
1 a1z1–
–---------------------- b1z
1– 1
1 a1z1–
–----------------------+=
b0 b1z1–
+
1 a1z1–
–-------------------------=
H z
H z
H z b0 b1z
1–+
1 a1z1–
–------------------------- z
z--
b0z b1+
z a1–-------------------- b0
z b1 b0+
z a1–-----------------------= = =
ECE 2610 Signals and Systems 8–16
Poles and Zeros
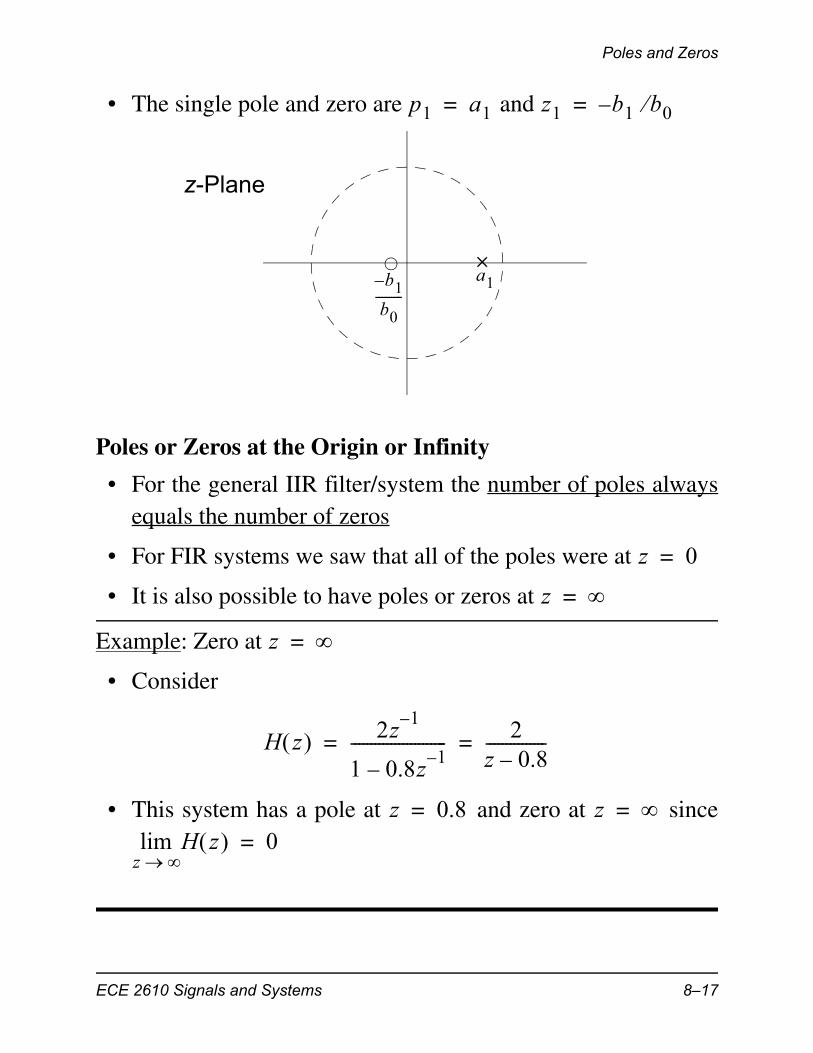
• The single pole and zero are and
Poles or Zeros at the Origin or Infinity
• For the general IIR filter/system the number of poles alwaysequals the number of zeros
• For FIR systems we saw that all of the poles were at
• It is also possible to have poles or zeros at
Example: Zero at
• Consider
• This system has a pole at and zero at since
p1 a1= z1 b1 b0–=
a1b1–
b0---------
z-Plane
z 0=
z =
z =
H z 2z1–
1 0.8z1–
–------------------------ 2
z 0.8–---------------= =
z 0.8= z =H z
z lim 0=
ECE 2610 Signals and Systems 8–17
Poles and Zeros
Example: Pole at
• Consider
• This system has a pole at and a zero at
Pole Locations and Stability
• We know that
(8.16)
• We note that this system has a pole at and a zero at
• The impulse response decays to zero so long as ,which is equivalent to requiring that the pole lies inside theunit circle
• System Stability: Causal LTI IIR systems, initially at rest,are stable if all of the poles of the system function lie insidethe unit circle
Example:
• Converting to positive powers of z
z =
H z 1 0.5z1–
+
z1–
------------------------ z 0.5+= =
z = z 0.5–=
h n anu n =
1
1 az1–
–------------------- H z =
z
z a=z 0=
a 1
H z 1 5z1–
– 1 0.995z1–
– =
H z z 5–z 0.995–---------------------= Pole at z 0.995 so stable=
ECE 2610 Signals and Systems 8–18
Poles and Zeros
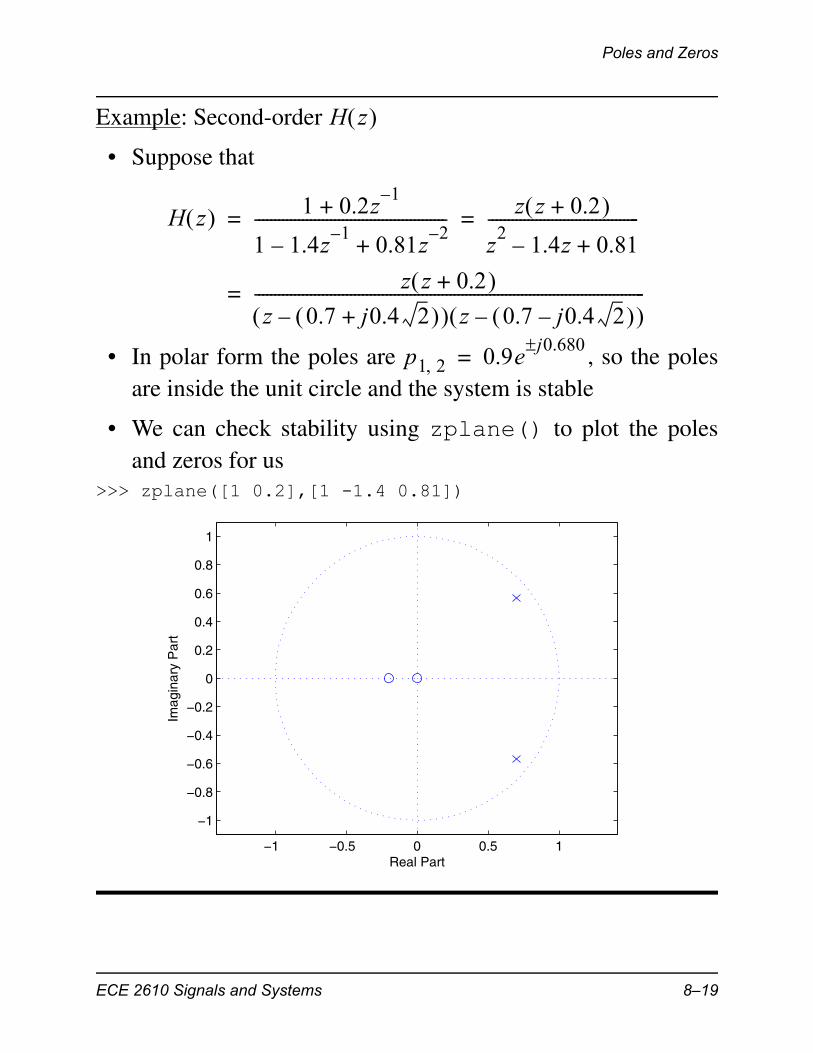
Example: Second-order
• Suppose that
• In polar form the poles are , so the polesare inside the unit circle and the system is stable
• We can check stability using zplane() to plot the polesand zeros for us
>>> zplane([1 0.2],[1 -1.4 0.81])
H z
H z 1 0.2z1–
+
1 1.4z1–
– 0.81z2–
+------------------------------------------------ z z 0.2+
z2
1.4z– 0.81+--------------------------------------= =
z z 0.2+ z 0.7 j0.4 2+ – z 0.7 j0.4 2– –
--------------------------------------------------------------------------------------------------=
p1 2 0.9ej0.680
=
−1 −0.5 0 0.5 1
−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
Real Part
Imag
inar
y P
art
ECE 2610 Signals and Systems 8–19
Frequency Response of an IIR Filter
Frequency Response of an IIR Filter
• From Chapter 7 we know that the frequency response isfound by letting in the system function (provided thesystem is stable)
(8.17)
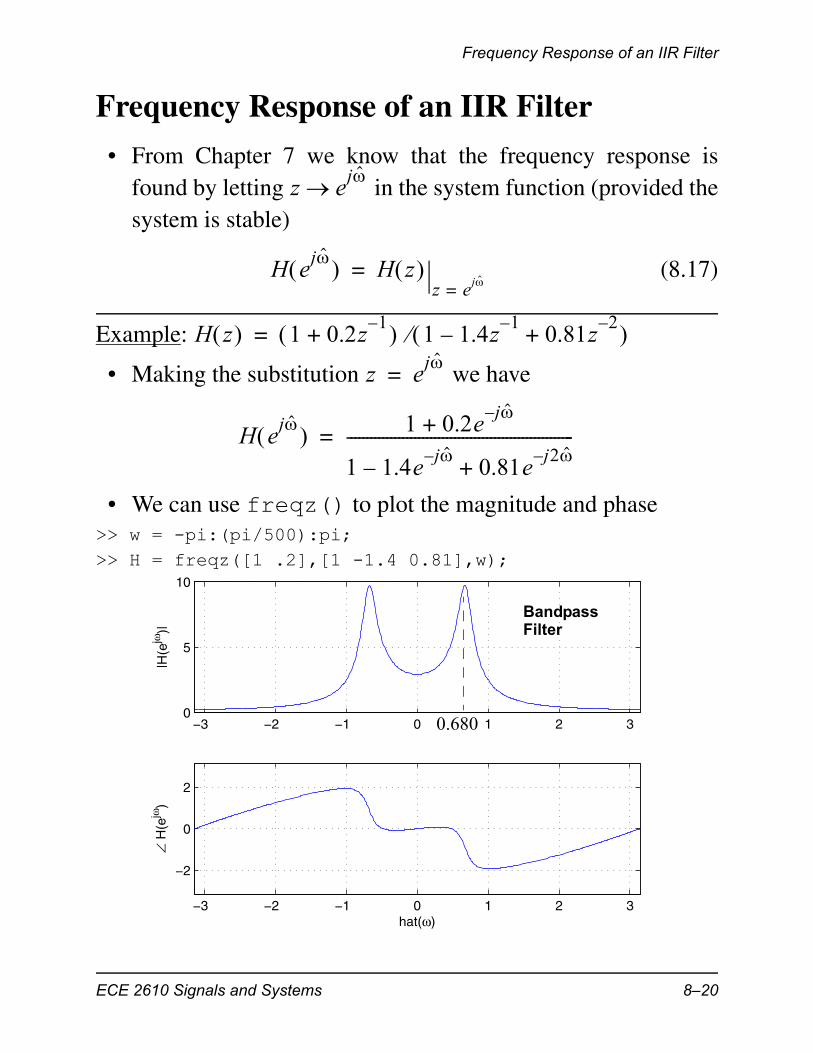
Example:
• Making the substitution we have
• We can use freqz() to plot the magnitude and phase>> w = -pi:(pi/500):pi;>> H = freqz([1 .2],[1 -1.4 0.81],w);
z ej
H ej H z
z ej==
H z 1 0.2z1–
+ 1 1.4z1–
– 0.81z2–
+ =
z ej
=
H ej 1 0.2e
j– +
1 1.4ej–
– 0.81ej– 2
+---------------------------------------------------------=
−3 −2 −1 0 1 2 30
5
10
|H(e
jω)|
−3 −2 −1 0 1 2 3
−2
0
2
∠ H
(ejω
)
hat(ω)
0.680
BandpassFilter
ECE 2610 Signals and Systems 8–20
Frequency Response of an IIR Filter
• This particular filter is a bandpass filter because it has a rela-tive large magnitude response over a narrow band of frequen-cies and small response otherwise
• From the earlier pole-zero analysis, the peak gain is near theangle the poles make to the real axis,
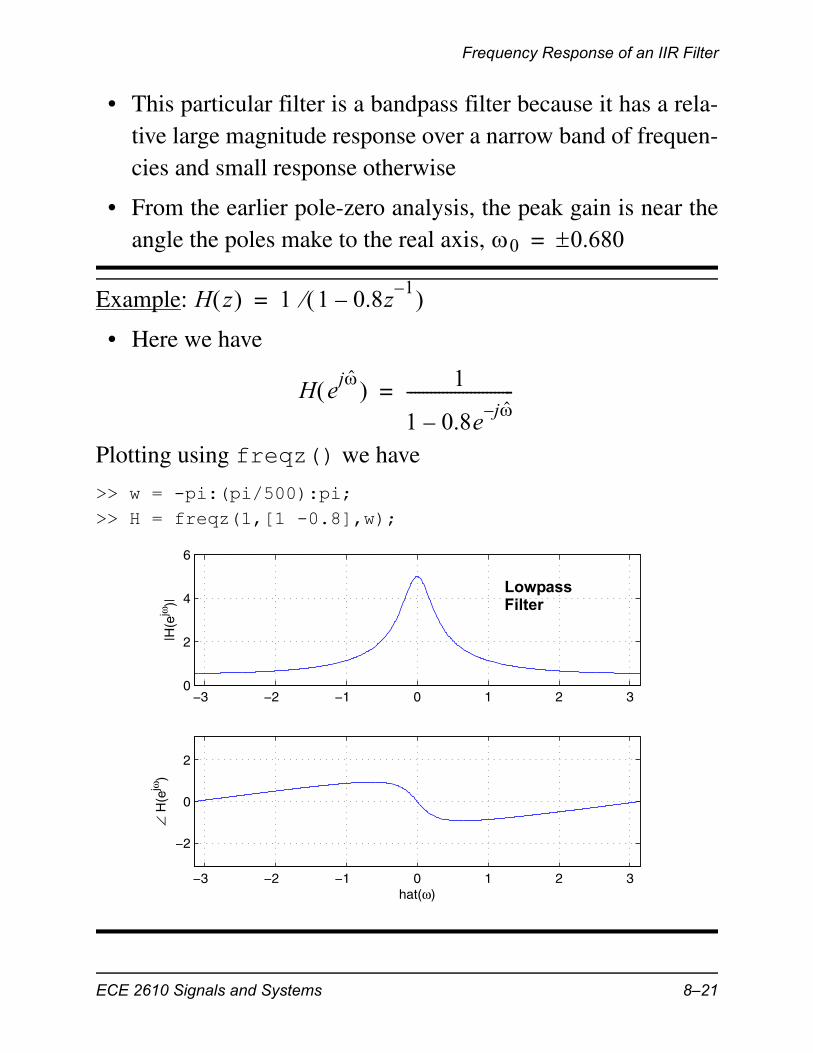
Example:
• Here we have
Plotting using freqz() we have
>> w = -pi:(pi/500):pi;>> H = freqz(1,[1 -0.8],w);
0 0.680=
H z 1 1 0.8z1–
– =
H ej 1
1 0.8ej–
–---------------------------=
−3 −2 −1 0 1 2 30
2
4
6
|H(e
jω)|
−3 −2 −1 0 1 2 3
−2
0
2
∠ H
(ejω
)
hat(ω)
LowpassFilter
ECE 2610 Signals and Systems 8–21
Frequency Response of an IIR Filter
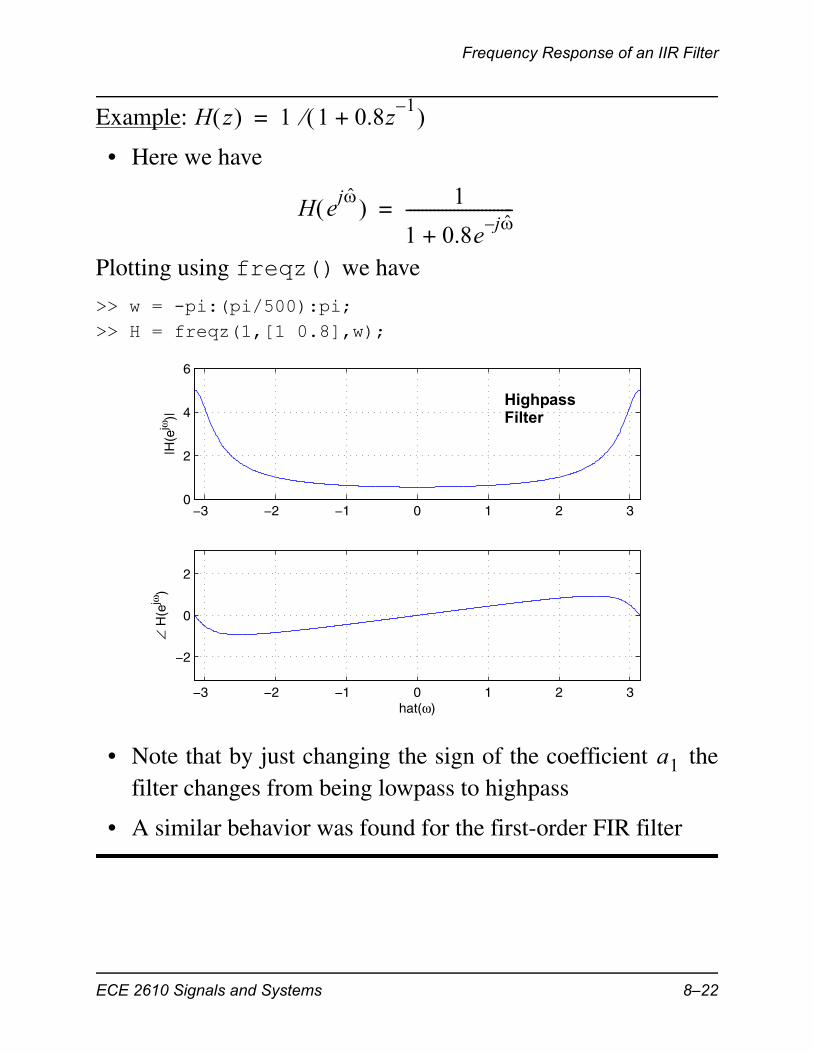
Example:
• Here we have
Plotting using freqz() we have
>> w = -pi:(pi/500):pi;>> H = freqz(1,[1 0.8],w);
• Note that by just changing the sign of the coefficient thefilter changes from being lowpass to highpass
• A similar behavior was found for the first-order FIR filter
H z 1 1 0.8z1–
+ =
H ej 1
1 0.8ej–
+---------------------------=
−3 −2 −1 0 1 2 30
2
4
6
|H(e
jω)|
−3 −2 −1 0 1 2 3
−2
0
2
∠ H
(ejω
)
hat(ω)
HighpassFilter
a1
ECE 2610 Signals and Systems 8–22
The Inverse z-Transform and Applications
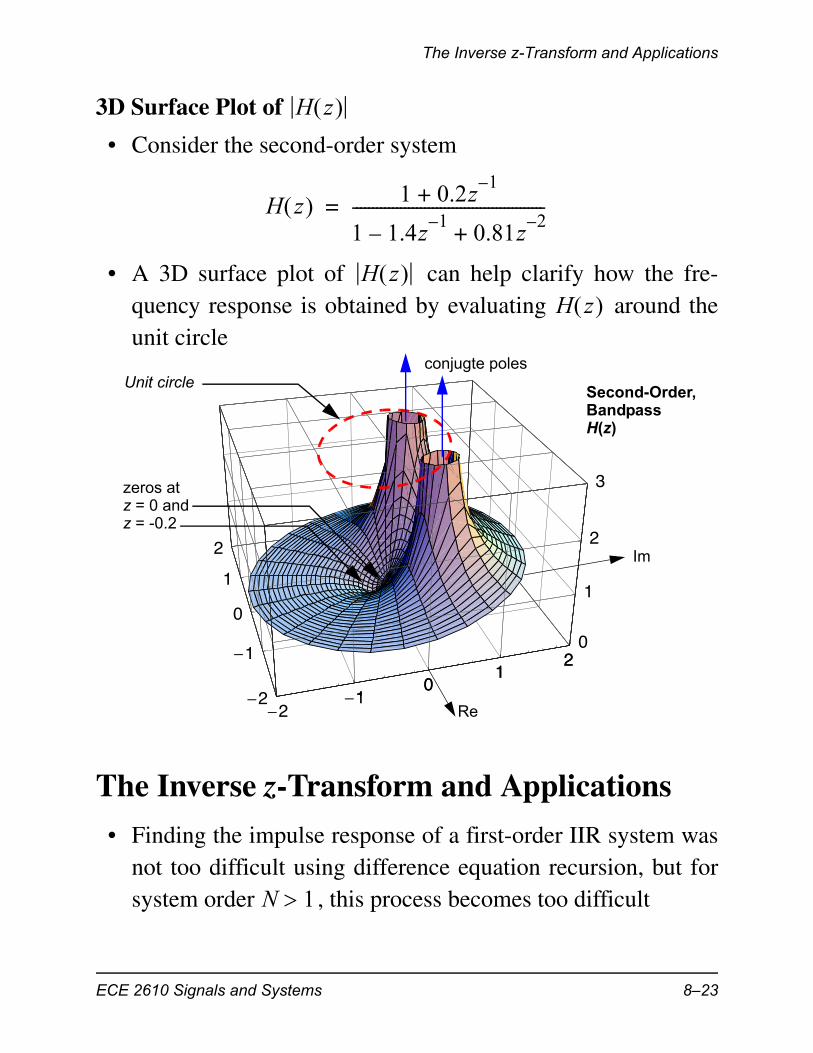
3D Surface Plot of
• Consider the second-order system
• A 3D surface plot of can help clarify how the fre-quency response is obtained by evaluating around theunit circle
The Inverse z-Transform and Applications
• Finding the impulse response of a first-order IIR system wasnot too difficult using difference equation recursion, but forsystem order , this process becomes too difficult
H z
H z 1 0.2z1–
+
1 1.4z1–
– 0.81z2–
+------------------------------------------------=
H z H z
�2�1
01
2
�2
�1
0
1
2
0
1
2
3
10
12
Re
Im
conjugte poles
zeros atz = 0 andz = -0.2
Unit circleSecond-Order,BandpassH(z)
N 1
ECE 2610 Signals and Systems 8–23
The Inverse z-Transform and Applications
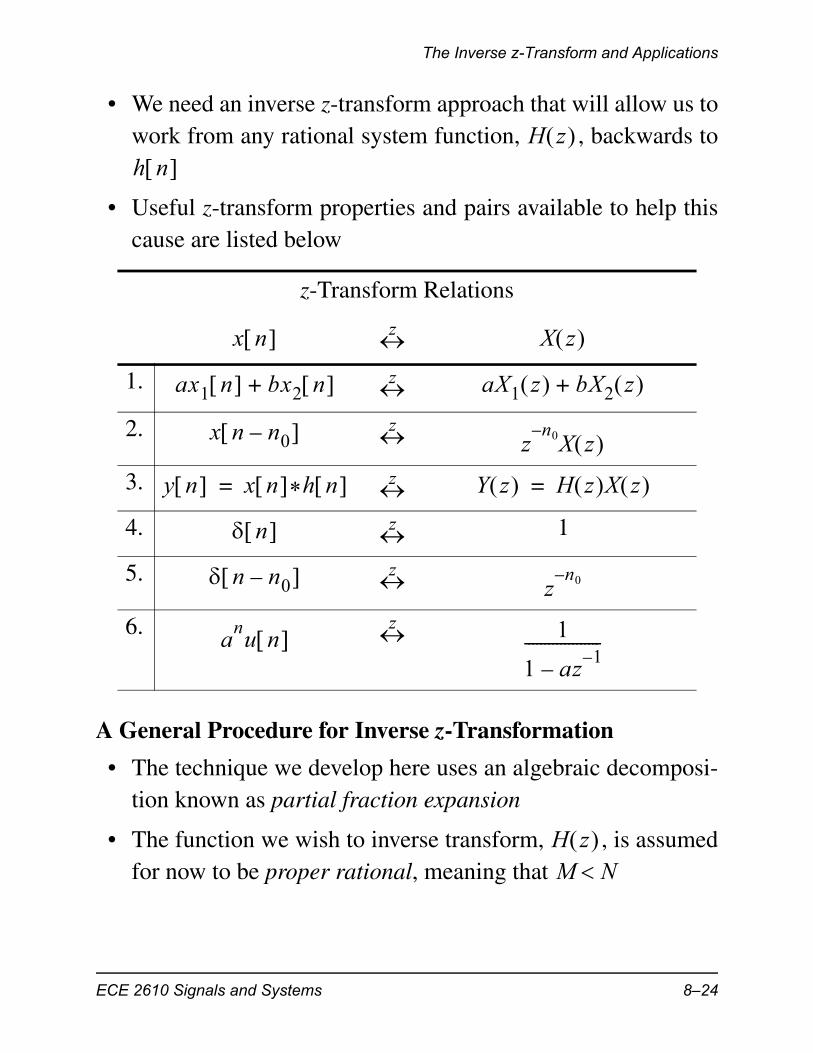
• We need an inverse z-transform approach that will allow us towork from any rational system function, , backwards to
• Useful z-transform properties and pairs available to help thiscause are listed below
A General Procedure for Inverse z-Transformation
• The technique we develop here uses an algebraic decomposi-tion known as partial fraction expansion
• The function we wish to inverse transform, , is assumedfor now to be proper rational, meaning that
z-Transform Relations
1.
2.
3.
4. 1
5.
6.
H z h n
x n z X z
ax1 n bx2 n + z aX1 z bX2 z +
x n n0– z zn0–X z
y n x n *h n = z Y z H z X z =
n z
n n0– z zn0–
anu n z 1
1 az1–
–-------------------
H z M N
ECE 2610 Signals and Systems 8–24
The Inverse z-Transform and Applications
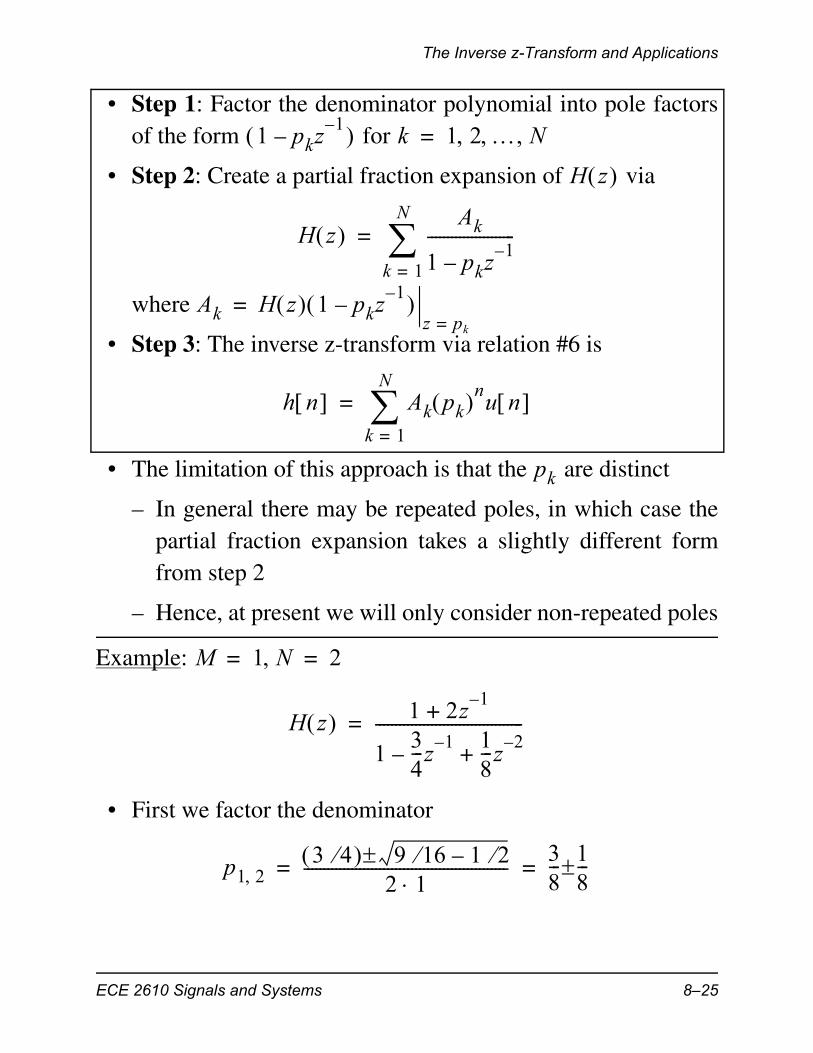
• Step 1: Factor the denominator polynomial into pole factorsof the form for
• Step 2: Create a partial fraction expansion of via
where
• Step 3: The inverse z-transform via relation #6 is
• The limitation of this approach is that the are distinct
– In general there may be repeated poles, in which case thepartial fraction expansion takes a slightly different formfrom step 2
– Hence, at present we will only consider non-repeated poles
Example:
• First we factor the denominator
1 pkz1–
– k 1 2 N =
H z
H z Ak
1 pkz1–
–----------------------
k 1=
N
=
Ak H z 1 pkz1–
– z pk=
=
h n Ak pk nu n k 1=
N
=
pk
M 1 N 2= =
H z 1 2z1–
+
134---z
1––
18---z
2–+
-------------------------------------=
p1 23 4 9 16 1 2–
2 1---------------------------------------------------
38--- 1
8---= =
ECE 2610 Signals and Systems 8–25
The Inverse z-Transform and Applications
• Solving for
• Solving for
• So,
• Inverse z-transform term-by-term using #6
H z 1 2z1–
+
112---z
1––
114---z
1––
---------------------------------------------------
A1
112---z
1––
--------------------A2
114---z
1––
--------------------+= =
A1
A11 2z
1–+
112---z
1––
114---z
1––
--------------------------------------------------- 1
12---z
1––
z 1 2=
=
1 2z1–
+
114---z
1––
--------------------
z 1– 2=
1 4+
1 12---–
------------ 10= ==
A2
A21 2z
1–+
112---z
1––
114---z
1––
--------------------------------------------------- 1
14---z
1––
z 1 4=
=
1 2z1–
+
112---z
1––
--------------------
z 1– 4=
1 8+1 2–------------ 9–= ==
H z 10
112---z
1––
-------------------- 9
114---z
1––
--------------------–=
ECE 2610 Signals and Systems 8–26
The Inverse z-Transform and Applications
• The MATLAB signal processing toolbox has a function thatcan perform partial fraction expansion
>> help residuez RESIDUEZ Z-transform partial-fraction expansion. [R,P,K] = RESIDUEZ(B,A) finds the residues, poles and direct terms of the partial-fraction expansion of B(z)/A(z), B(z) r(1) r(n) ---- = ------------ +... ------------ + k(1) + k(2)z^(-1) ... A(z) 1-p(1)z^(-1) 1-p(n)z^(-1) B and A are the numerator and denominator polynomial coefficients, respectively, in ascending powers of z^(-1). R and P are column vectors containing the residues and poles, respectively. K contains the direct terms in a row vector. The number of poles is n = length(A)-1 = length(R) = length(P) The direct term coefficient vector is empty if length(B) < length(A); otherwise, length(K) = length(B)-length(A)+1 If P(j) = ... = P(j+m-1) is a pole of multiplicity m, then the expansion includes terms of the form R(j) R(j+1) R(j+m-1) -------------- + ------------------ + ... + ------------------ 1 - P(j)z^(-1) (1 - P(j)z^(-1))^2 (1 - P(j)z^(-1))^m [B,A] = RESIDUEZ(R,P,K) converts the partial-fraction expansion back to B/A form.
• Using residuez() we find:>> [A,p,K] = residuez([1 2],[1 -3/4 1/8])
A = 10 % The partial fraction coefficients -9 % agreep = 5.0000e-01 % The pole factoring agrees 2.5000e-01 % K = [] % Results from long division % to make proper rational (NA here).
h n 1012--- nu n 9
14--- nu n –=
ECE 2610 Signals and Systems 8–27
The Inverse z-Transform and Applications
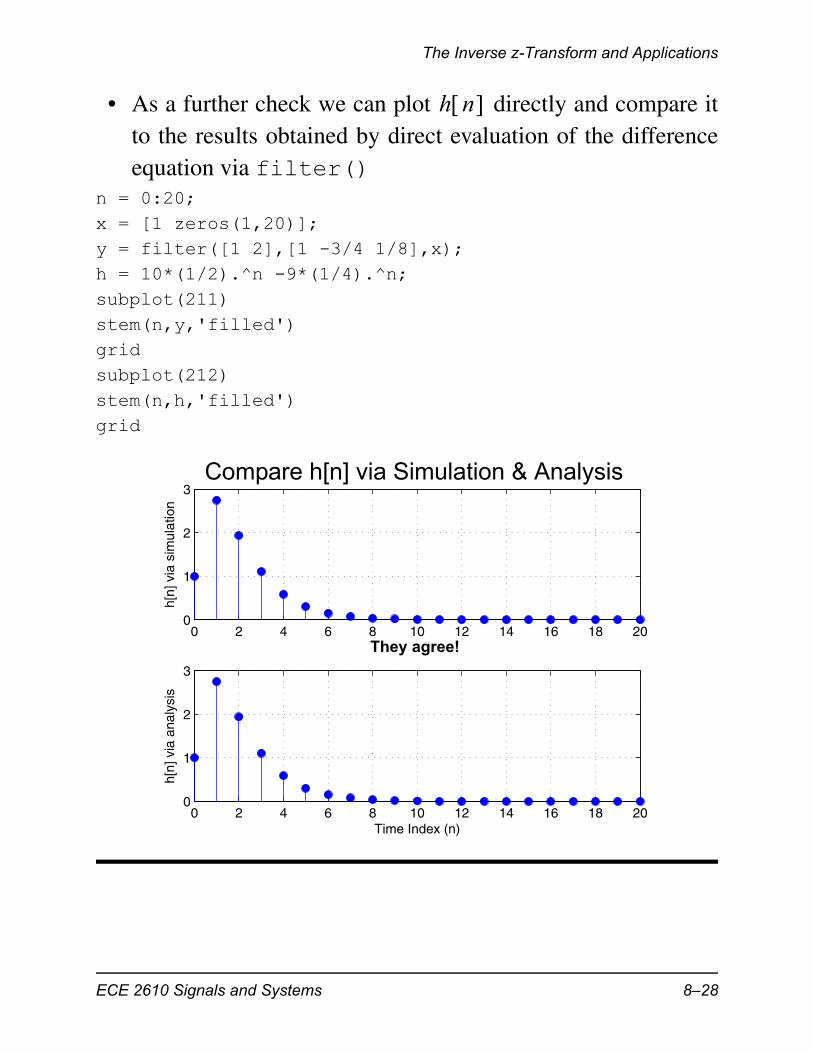
• As a further check we can plot directly and compare itto the results obtained by direct evaluation of the differenceequation via filter()
n = 0:20;x = [1 zeros(1,20)];y = filter([1 2],[1 -3/4 1/8],x);h = 10*(1/2).^n -9*(1/4).^n;subplot(211)stem(n,y,'filled')gridsubplot(212)stem(n,h,'filled')grid
h n
0 2 4 6 8 10 12 14 16 18 200
1
2
3
h[n]
via
sim
ulat
ion
0 2 4 6 8 10 12 14 16 18 200
1
2
3
h[n]
via
ana
lysi
s
Time Index (n)
Compare h[n] via Simulation & Analysis
They agree!
ECE 2610 Signals and Systems 8–28
The Inverse z-Transform and Applications
Example:
• Find for an IIR system having input andsystem function
• We will first find
• From table entry #6 with
• As a result of table entry #3
• We now use a partial fraction expansion over the three realpoles 1, -1/3, and 1/2
• Solving for the coefficients
y n x n *h n =
y n x n 2u n =
H z 1 z1–
+
116---z
1––
16---z
2––
-------------------------------------=
Y z
a 1=
X z 2
1 z1–
–----------------=
Y z X z H z 2 2z1–
+
1 z1–
– 116---z
1––
16---z
2––
----------------------------------------------------------------= =
2 2z1–
+
1 z1–
– 113---z
1–+
112---z
1––
-------------------------------------------------------------------------=
Y z A1
1 z1–
–----------------
A2
113---z
1–+
--------------------A3
112---z
1––
--------------------+ +=
ECE 2610 Signals and Systems 8–29
The Inverse z-Transform and Applications
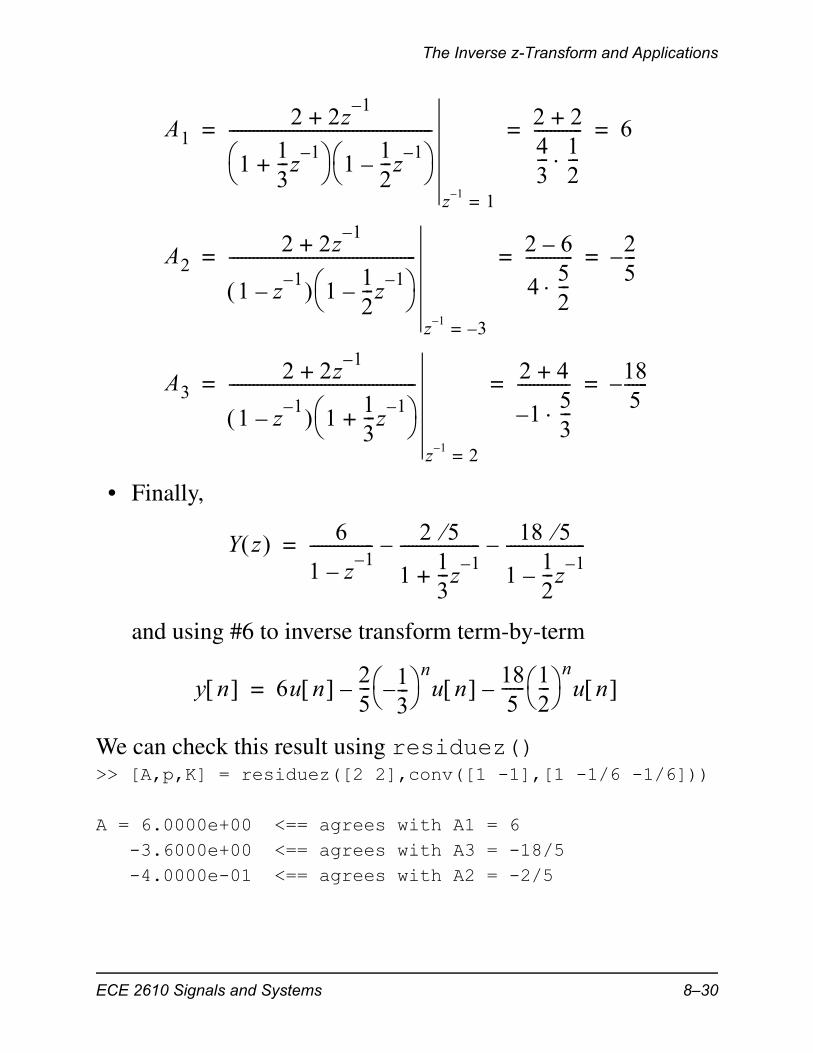
• Finally,
and using #6 to inverse transform term-by-term
We can check this result using residuez()>> [A,p,K] = residuez([2 2],conv([1 -1],[1 -1/6 -1/6]))
A = 6.0000e+00 <== agrees with A1 = 6 -3.6000e+00 <== agrees with A3 = -18/5 -4.0000e-01 <== agrees with A2 = -2/5
A12 2z
1–+
113---z
1–+
112---z
1––
---------------------------------------------------
z 1– 1=
2 2+43--- 1
2---
------------ 6= = =
A22 2z
1–+
1 z1–
– 112---z
1––
-----------------------------------------------
z 1– 3–=
2 6–
452---
------------ 25---–= = =
A32 2z
1–+
1 z1–
– 113---z
1–+
-----------------------------------------------
z 1– 2=
2 4+
1–53---
------------- 185------–= = =
Y z 6
1 z1–
–---------------- 2 5
113---z
1–+
--------------------– 18 5
112---z
1––
--------------------–=
y n 6u n 25--- 1
3---–
nu n –185------ 1
2--- nu n –=
ECE 2610 Signals and Systems 8–30
The Inverse z-Transform and Applications
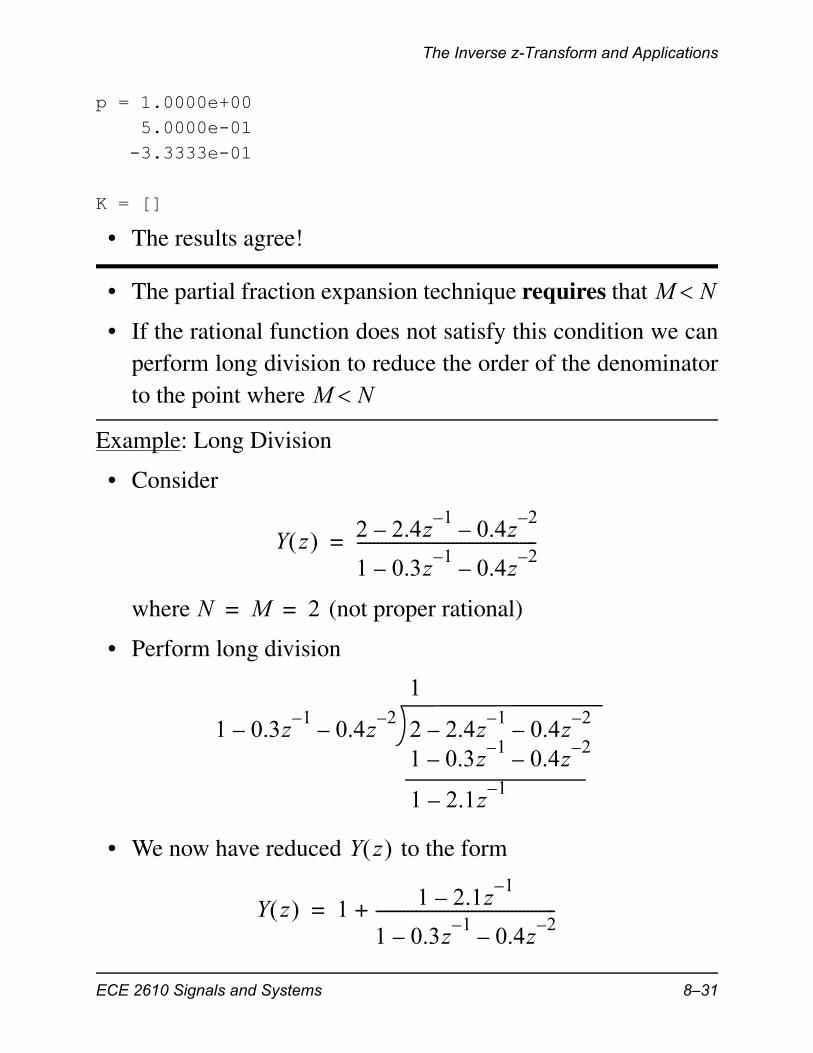
p = 1.0000e+00 5.0000e-01 -3.3333e-01
K = []
• The results agree!
• The partial fraction expansion technique requires that
• If the rational function does not satisfy this condition we canperform long division to reduce the order of the denominatorto the point where
Example: Long Division
• Consider
where (not proper rational)
• Perform long division
• We now have reduced to the form
M N
M N
Y z 2 2.4z1–
– 0.4z2–
–
1 0.3z1–
– 0.4z2–
–---------------------------------------------=
N M 2= =
1 0.3z1–
– 0.4z2–
– 2 2.4z1–
– 0.4z2–
–
1
1 0.3z1–
– 0.4z2–
–
1 2.1z1–
–
Y z
Y z 1 1 2.1z1–
–
1 0.3z1–
– 0.4z2–
–---------------------------------------------+=
ECE 2610 Signals and Systems 8–31
The Inverse z-Transform and Applications
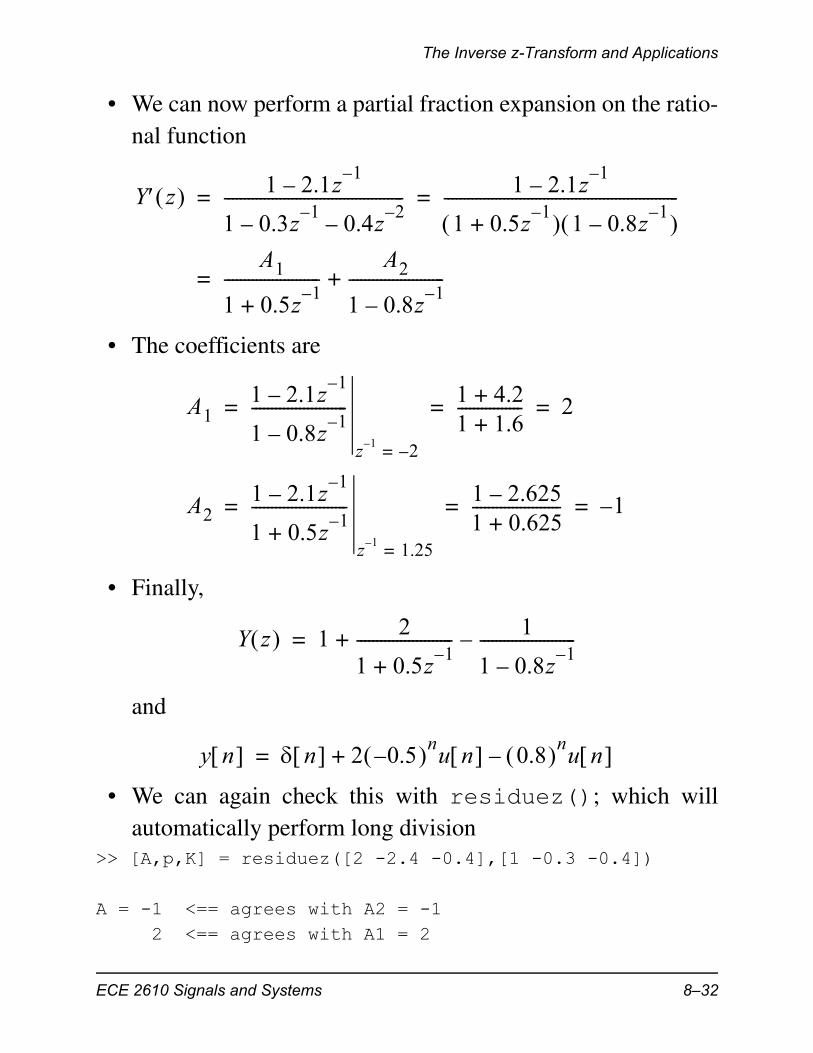
• We can now perform a partial fraction expansion on the ratio-nal function
• The coefficients are
• Finally,
and
• We can again check this with residuez(); which willautomatically perform long division
>> [A,p,K] = residuez([2 -2.4 -0.4],[1 -0.3 -0.4])
A = -1 <== agrees with A2 = -1 2 <== agrees with A1 = 2
Y z 1 2.1z1–
–
1 0.3z1–
– 0.4z2–
–--------------------------------------------- 1 2.1z
1––
1 0.5z1–
+ 1 0.8z1–
– -----------------------------------------------------------= =
A1
1 0.5z1–
+------------------------
A2
1 0.8z1–
–------------------------+=
A11 2.1z
1––
1 0.8z1–
–------------------------
z 1– 2–=
1 4.2+1 1.6+---------------- 2= = =
A21 2.1z
1––
1 0.5z1–
+------------------------
z 1– 1.25=
1 2.625–1 0.625+---------------------- 1–= = =
Y z 1 2
1 0.5z1–
+------------------------ 1
1 0.8z1–
–------------------------–+=
y n n 2 0.5– nu n 0.8 nu n –+=
ECE 2610 Signals and Systems 8–32
Steady-State Response and Stability
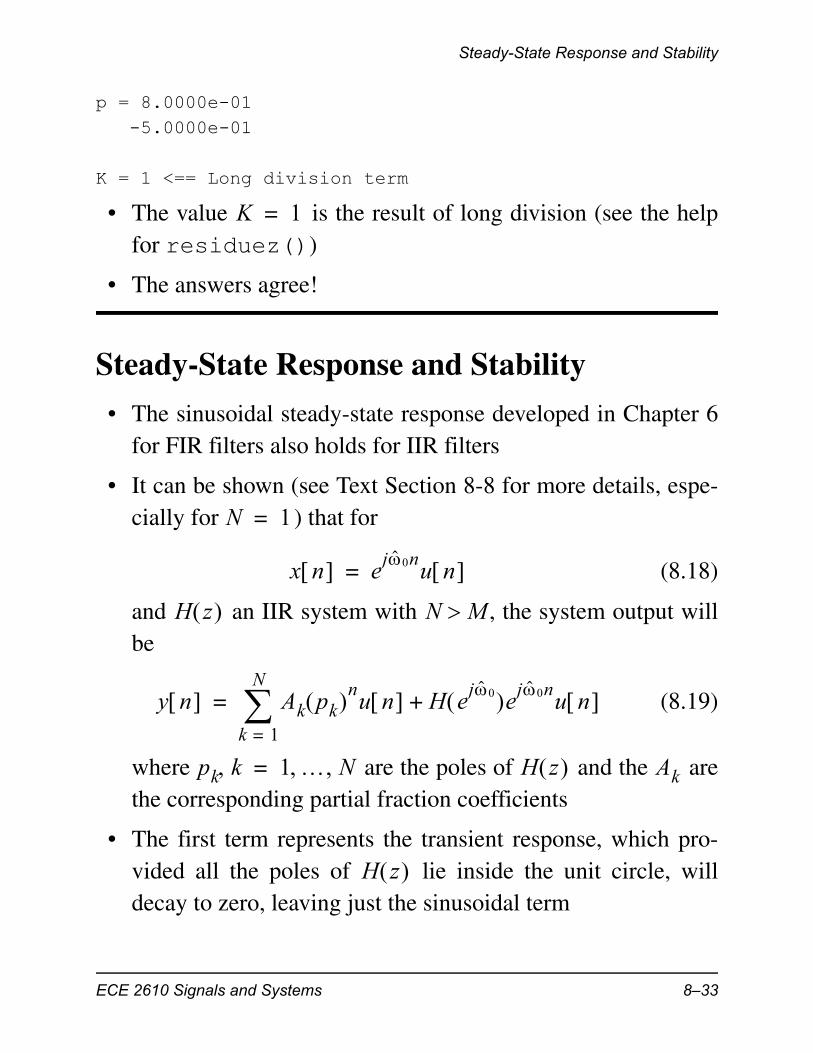
p = 8.0000e-01 -5.0000e-01
K = 1 <== Long division term
• The value is the result of long division (see the helpfor residuez())
• The answers agree!
Steady-State Response and Stability
• The sinusoidal steady-state response developed in Chapter 6for FIR filters also holds for IIR filters
• It can be shown (see Text Section 8-8 for more details, espe-cially for ) that for
(8.18)
and an IIR system with , the system output willbe
(8.19)
where are the poles of and the arethe corresponding partial fraction coefficients
• The first term represents the transient response, which pro-vided all the poles of lie inside the unit circle, willdecay to zero, leaving just the sinusoidal term
K 1=
N 1=
x n ej0nu n =
H z N M
y n Ak pk nu n k 1=
N
H ej0 ej0nu n +=
pk k 1 N = H z Ak
H z
ECE 2610 Signals and Systems 8–33
Steady-State Response and Stability
• For the output to reach sinusoidal steady-state we must have to insure that the transient term (first term) decays to
zero, this then insures that the system is stable
• Summary: Poles inside the unit circle to insure stability
Example:
• Input a cosine with starting at to the sys-tem
• This is a second-order IIR filter, so the transient term consistsof two exponentials
• Second-order system will be studied in more detail in thenext section
• Observe the transient using MATLAB
>> n = -5:50;>> x = cos(2*pi/20*n).*ustep(n,0);>> y = filter(5,[1 -1.5 0.8],x);>> subplot(211)>> stem(n,x,'filled')>> axis([-5 50 -1 1]); grid>> ylabel('x[n]')>> subplot(212)>> stem(n,y,'filled')>> axis([-5 50 -30 30]); grid>> ylabel('y[n]')>> xlabel('Time Index (n)')
pk 1
x n 2 20 n u n cos=
0 0.1= n 0=
H z 5
1 1.8z1–
– 0.9z2–
+---------------------------------------------=
ECE 2610 Signals and Systems 8–34
Steady-State Response and Stability
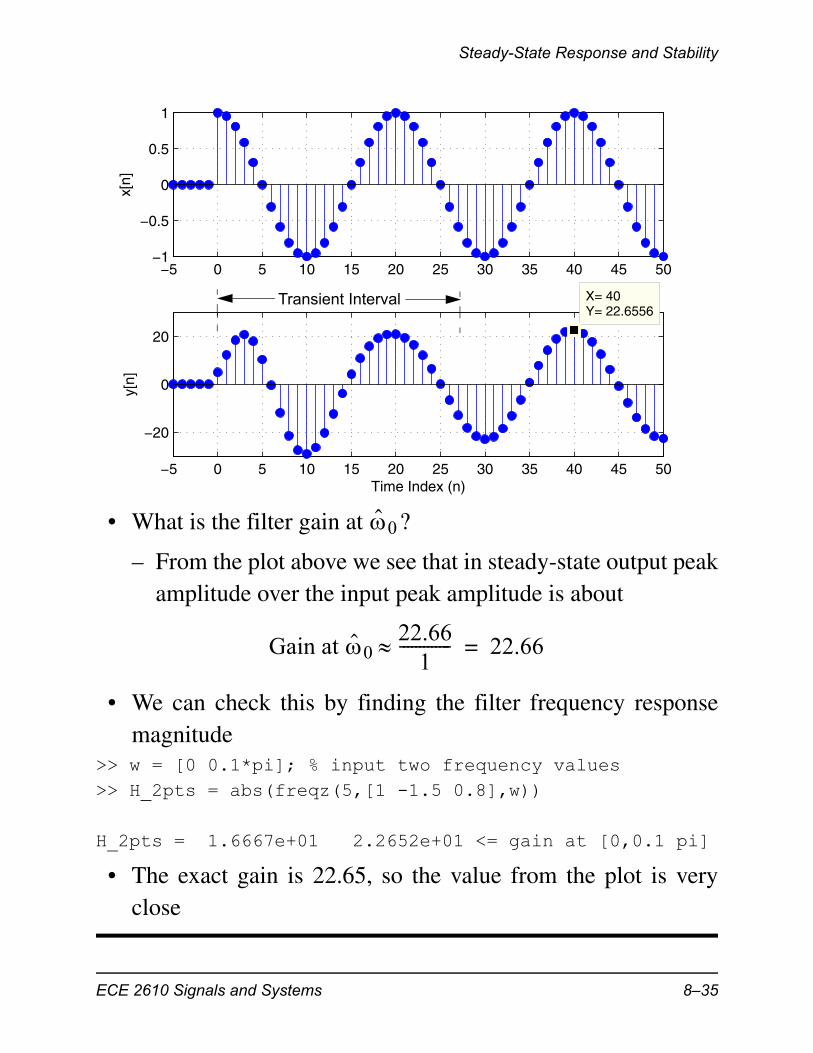
• What is the filter gain at ?
– From the plot above we see that in steady-state output peakamplitude over the input peak amplitude is about
• We can check this by finding the filter frequency responsemagnitude
>> w = [0 0.1*pi]; % input two frequency values>> H_2pts = abs(freqz(5,[1 -1.5 0.8],w))
H_2pts = 1.6667e+01 2.2652e+01 <= gain at [0,0.1 pi]
• The exact gain is 22.65, so the value from the plot is veryclose
−5 0 5 10 15 20 25 30 35 40 45 50−1
−0.5
0
0.5
1x[
n]
−5 0 5 10 15 20 25 30 35 40 45 50
−20
0
20
X= 40Y= 22.6556
y[n]
Time Index (n)
Transient Interval
0
Gain at 022.66
1------------- 22.66=
ECE 2610 Signals and Systems 8–35
Second-Order Filters
Second-Order Filters
• Second-order IIR filters allow for the possibility of complexconjugate pole and zero pairs, yet still have real coefficients
• The general second-order system function is
(8.20)
• The corresponding difference equation is
(8.21)
• The direct-form I and direct-form II structures, discussed onpages 8–2 and 8–13 respectively, can be used to implement(8.21)
Poles and Zeros
• To identify the poles and zeros of we can first convertto positive powers of z and then factor into poles and zeros
• The coefficients are related to the roots (poles & zeros) via
(8.22)
H z b0 b1z
1–b2z
2–+ +
1 a1z1–
– a2z2–
–---------------------------------------------=
y n a1y n 1– a2y n 2– +=
b0x n b1x n 1– b2x n 2– + + +
H z
H z b0z
2b1z b2+ +
z2a1z– a2+
------------------------------------- b0
z z1– z z2– z p1– z p2–
-------------------------------------= =
b1 b0 z1 z2+ –= b2 b0 z1z2=
a1 p1 p2+= a2 p1p2–=
ECE 2610 Signals and Systems 8–36
Second-Order Filters
• Given real coefficients, numerator and denominator, the rootsoccur either as two real values or as a complex-conjugate pair
• Poles: From the quadratic formula
– Real poles occur when
– Complex-conjugate poles occur otherwise, and are givenby
where
• Zeros: Similar results hold for the zeros if we factor out and then replace with and replace with
p1 2a1 a1
24a2+
2----------------------------------=
a12
4a2+ 0
p1 212---a1 j
12--- a1
2– 4a2–=
rej
=
r a2–=
cos1– a1
2 a2–----------------
=
b0a1 b1 b0– a2
b2 b0–
ECE 2610 Signals and Systems 8–37

Second-Order Filters
Example: Complex Poles and Zeros
• Consider
• Apply the quadratic formula to the numerator and denomina-tor to find the zeros and poles
• We can use the MATLAB function tf2zp() to convert thesystem function form to a zero pole form, plus a gain term
>> [z,p,K] = tf2zp([3 2 2.5],[1 -1.5 0.8])
z = -3.3333e-01 + 8.4984e-01i % these agree with the -3.3333e-01 - 8.4984e-01i % hand calculationsp = 7.5000e-01 + 4.8734e-01i 7.5000e-01 - 4.8734e-01iK = 3 % K is the same as b0 in this case
H z 3 2z1–
2.5z2–
+ +
1 1.5z1–
– 0.8z2–
+---------------------------------------------
3 123---z
1– 2.53
-------z2–
+ +
1 1.5z1–
– 0.8z2–
+---------------------------------------------------= =
z1 22 2
24 3 2.5 ––
2 3-----------------------------------------------------=
0.3333 j0.8498– 0.9129ej1.9446
==
p1 21.5 1.5
24 1 0.8 –
2 1-----------------------------------------------------------=
0.7500 j0.4873 0.8944ej0.5762
==
ECE 2610 Signals and Systems 8–38
Second-Order Filters
Impulse Response
• Using a partial fraction expansion we can inverse transformany rational back to the impulse response
• Given
(8.23)
we first perform long division to reduce the numerator orderby one
• It can be shown that the partial fraction expansion will be ofthe form
(8.24)
where
• The impulse response is found using the table on page 8–24
(8.25)
• This is a very general result, because the poles may be eitherreal or complex conjugates
– Note that if (no long division is required) then thedelta function term in (8.25) is not needed
H z h n
H z b0 b1z
1–b2z
2–+ +
1 a1z1–
– a2z2–
–---------------------------------------------
b0 b1z1–b2z
2–+ +
1 p1z1–
– 1 p2z1–
– ------------------------------------------------------= =
H z b2
a2-----–
A1
1 p1z1–
–----------------------
A2
1 p2z1–
–----------------------+ +=
Ak H z 1 pkz1–
– z pk=
=
h n b2
a2----- n – A1 p1 nu n A2 p2 nu n + +=
b2 0=
ECE 2610 Signals and Systems 8–39
Second-Order Filters
– For complex conjugates poles further simplification is pos-sible because and will also be complex conjugates
• Complex Conjugate Poles: To simplify (8.25) for this casewe first write and in polar form
(8.26)
– We can now write
(8.27)
and (8.25) specializes to
(8.28)
– We also see from this form that if we place the poles on theunit circle, the impulse response will contain a pure sinu-soid, since
Example: Conjugate Poles Inside the Unit Circle
• Find the impulse response corresponding to
• The partial fraction expansion is of the form
A1 A2
A1 p1
A1 ej=
p1 rej
=
A1 p1 n A2 p2 n+ rnej n + rne j n + –+=
2rn n + cos=
b2
a2----- n – 2rn n + u n cos+
rn
1n 1=
H z 3 z1–
+
134---ej 4
z1–
– 1
34---e
j– 4z
1––
-------------------------------------------------------------------------------=
ECE 2610 Signals and Systems 8–40
Second-Order Filters
• We know that
• Using the general result of (8.28) we see that ,, , and , so
• Check using residuez()>> [A,p,K] = residuez([3 1],[1 -2*3/4*cos(pi/4) 9/16])
A = 1.5000e+00 - 2.4428e+00i 1.5000e+00 + 2.4428e+00i
p = 5.3033e-01 + 5.3033e-01i 5.3033e-01 - 5.3033e-01i
K = []
>> [abs(A(1)) angle(A(1))] % Get mag and angle of A1
ans = 2.8666e+00 -1.0201e+00 % The results agree
H z A1
134---ej 4
z1–
–--------------------------------
A2
134---e
j– 4z
1––
-----------------------------------+=
A2 A1*=
A13 z
1–+
134---e
j 4–z
1––
-----------------------------------
z 1– 43---e j 4–=
343---e
j 3–+
1 j+---------------------------= =
2.867ej1.020–
=
2.867= 1.020–= r 0.75= 4=
h n 2 2.867 0.75 n 4---n 1.020– cos =
ECE 2610 Signals and Systems 8–41
Second-Order Filters
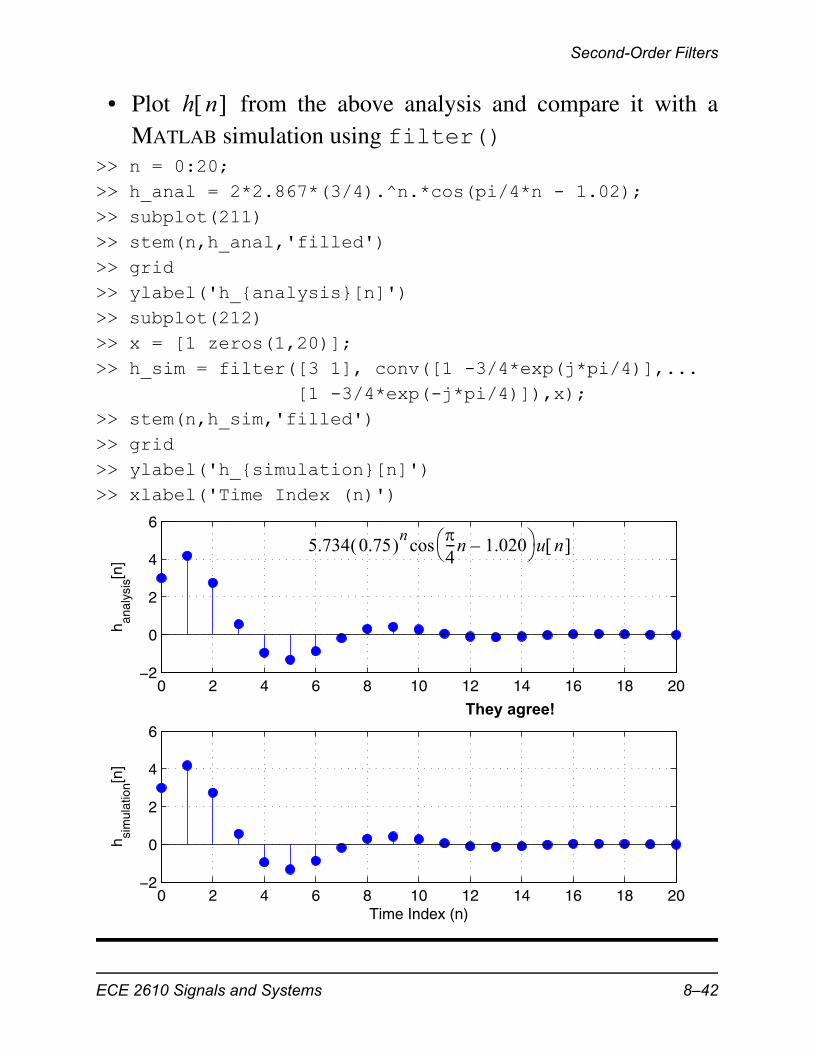
• Plot from the above analysis and compare it with aMATLAB simulation using filter()
>> n = 0:20;>> h_anal = 2*2.867*(3/4).^n.*cos(pi/4*n - 1.02);>> subplot(211)>> stem(n,h_anal,'filled')>> grid>> ylabel('h_{analysis}[n]')>> subplot(212)>> x = [1 zeros(1,20)];>> h_sim = filter([3 1], conv([1 -3/4*exp(j*pi/4)],... [1 -3/4*exp(-j*pi/4)]),x);>> stem(n,h_sim,'filled')>> grid>> ylabel('h_{simulation}[n]')>> xlabel('Time Index (n)')
h n
0 2 4 6 8 10 12 14 16 18 20−2
0
2
4
6
h anal
ysis
[n]
0 2 4 6 8 10 12 14 16 18 20−2
0
2
4
6
h sim
ulat
ion[n
]
Time Index (n)
They agree!
5.734 0.75 n 4---n 1.020– u n cos
ECE 2610 Signals and Systems 8–42
Second-Order Filters
Frequency Response
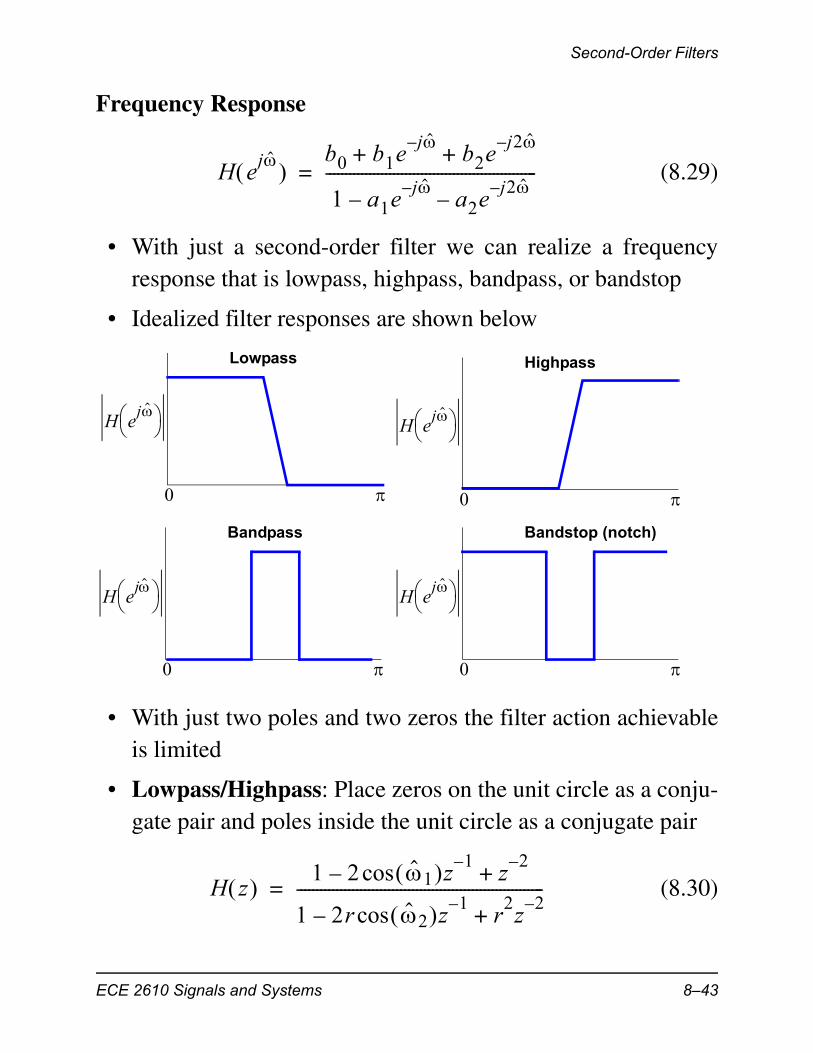
(8.29)
• With just a second-order filter we can realize a frequencyresponse that is lowpass, highpass, bandpass, or bandstop
• Idealized filter responses are shown below
• With just two poles and two zeros the filter action achievableis limited
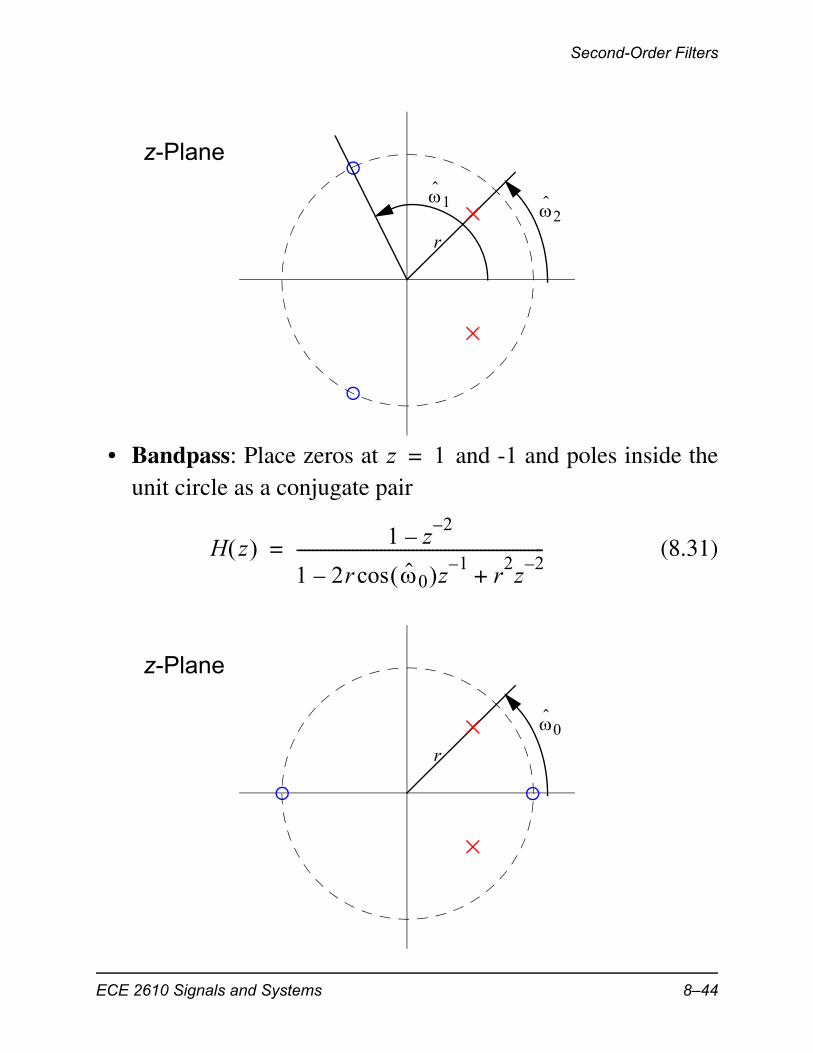
• Lowpass/Highpass: Place zeros on the unit circle as a conju-gate pair and poles inside the unit circle as a conjugate pair
(8.30)
H ej
b0 b1ej–
b2ej2–
+ +
1 a1ej–
a2ej2–
––-----------------------------------------------------=
0
H ej
Lowpass
0
H ej
Highpass
0
H ej
Bandpass
0
H ej
Bandstop (notch)
H z 1 2 1 z 1–
cos– z2–
+
1 2r 2 z 1–cos– r
2z
2–+
--------------------------------------------------------------=
ECE 2610 Signals and Systems 8–43
Second-Order Filters
• Bandpass: Place zeros at and -1 and poles inside theunit circle as a conjugate pair
(8.31)
z-Plane
1 2
r
z 1=
H z 1 z2–
–
1 2r 0 z 1–cos– r
2z
2–+
--------------------------------------------------------------=
z-Plane
0
r
ECE 2610 Signals and Systems 8–44
Example of an IIR Lowpass Filter
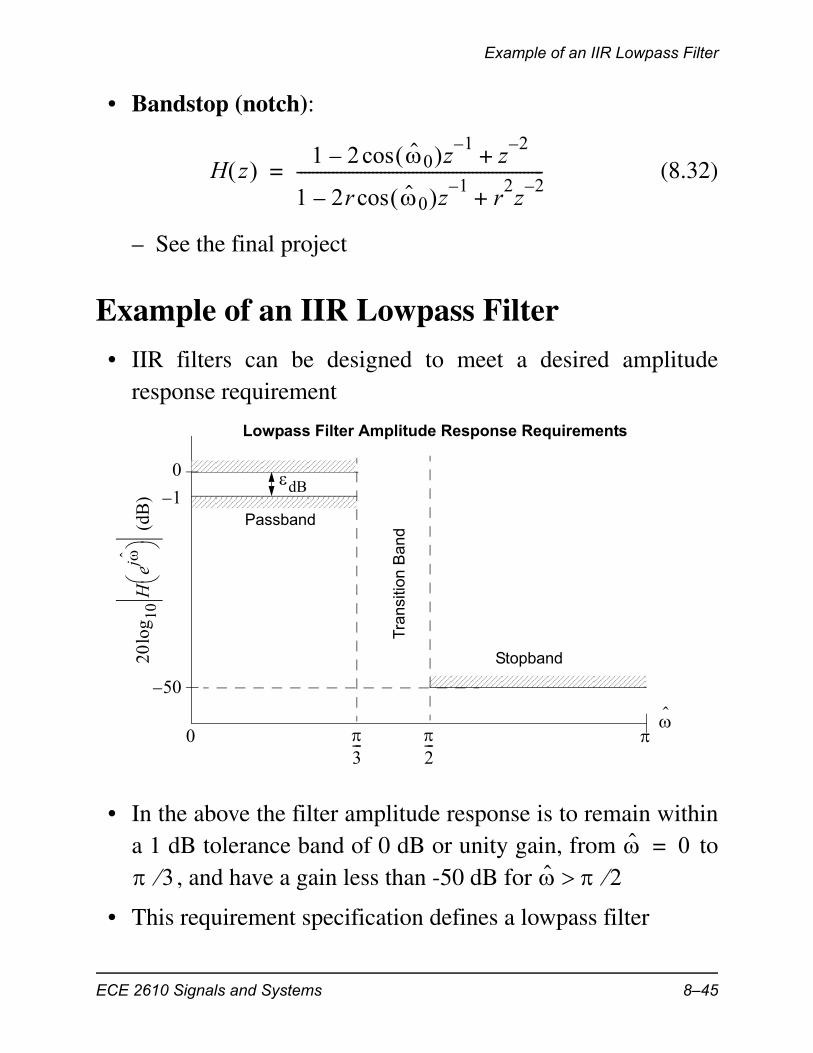
• Bandstop (notch):
(8.32)
– See the final project
Example of an IIR Lowpass Filter
• IIR filters can be designed to meet a desired amplituderesponse requirement
• In the above the filter amplitude response is to remain withina 1 dB tolerance band of 0 dB or unity gain, from to
, and have a gain less than -50 dB for
• This requirement specification defines a lowpass filter
H z 1 2 0 z 1–
cos– z2–
+
1 2r 0 z 1–cos– r
2z
2–+
--------------------------------------------------------------=20
log 10
Hej
(dB
)
0
3---
2---
0
50–
dB
Passband
Stopband
Tra
nsiti
on B
and
1–
Lowpass Filter Amplitude Response Requirements
0= 3 2
ECE 2610 Signals and Systems 8–45
Example of an IIR Lowpass Filter
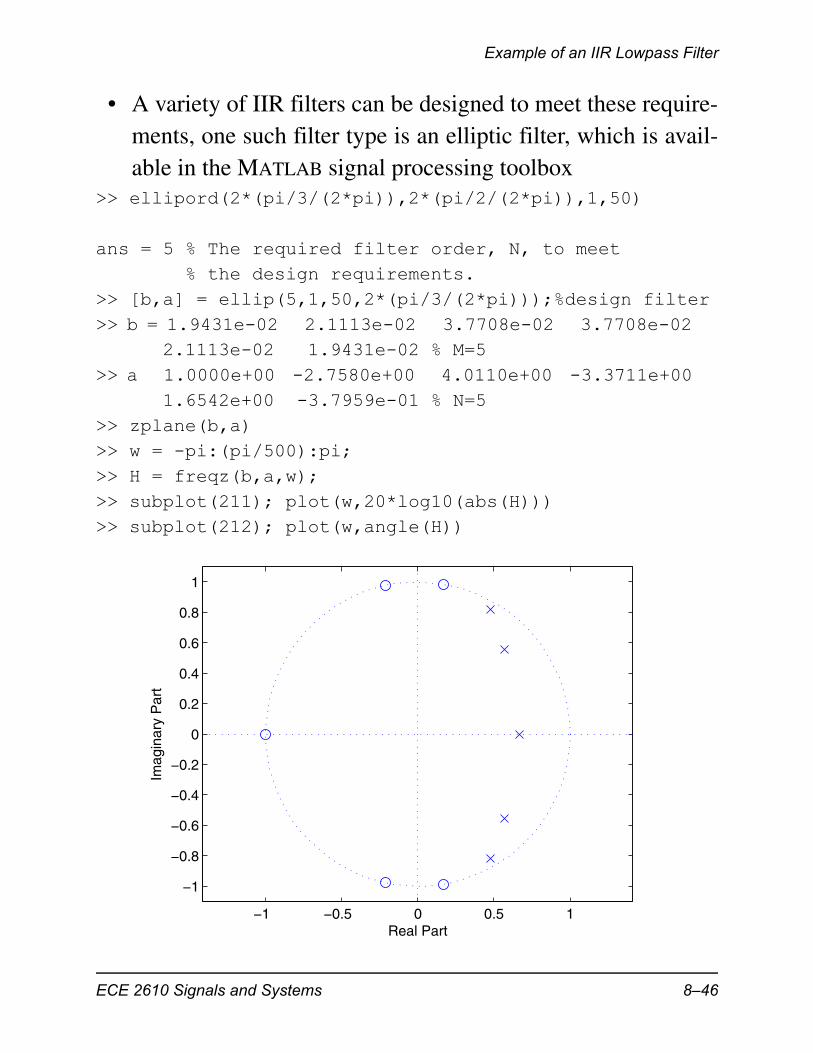
• A variety of IIR filters can be designed to meet these require-ments, one such filter type is an elliptic filter, which is avail-able in the MATLAB signal processing toolbox
>> ellipord(2*(pi/3/(2*pi)),2*(pi/2/(2*pi)),1,50)
ans = 5 % The required filter order, N, to meet % the design requirements.>> [b,a] = ellip(5,1,50,2*(pi/3/(2*pi)));%design filter>> b = 1.9431e-02 2.1113e-02 3.7708e-02 3.7708e-02 2.1113e-02 1.9431e-02 % M=5>> a 1.0000e+00 -2.7580e+00 4.0110e+00 -3.3711e+00 1.6542e+00 -3.7959e-01 % N=5>> zplane(b,a)>> w = -pi:(pi/500):pi;>> H = freqz(b,a,w);>> subplot(211); plot(w,20*log10(abs(H)))>> subplot(212); plot(w,angle(H))
−1 −0.5 0 0.5 1
−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
Real Part
Imag
inar
y P
art
ECE 2610 Signals and Systems 8–46
Example of an IIR Lowpass Filter
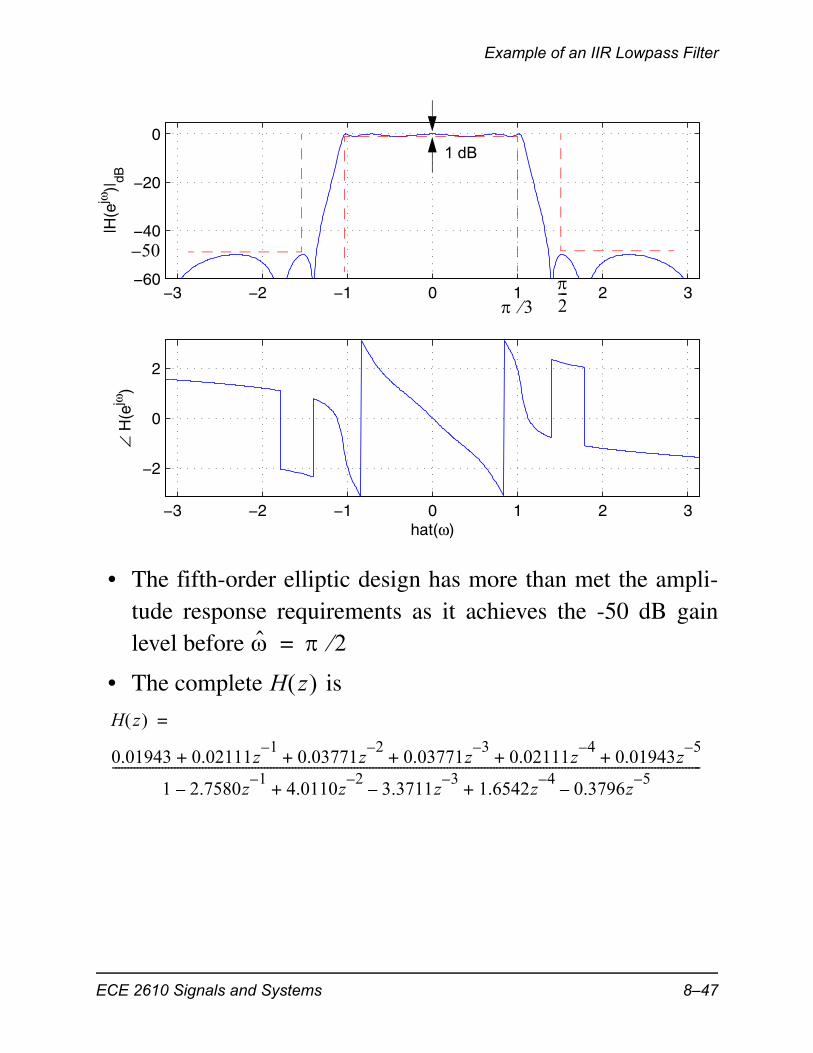
• The fifth-order elliptic design has more than met the ampli-tude response requirements as it achieves the -50 dB gainlevel before
• The complete is
−3 −2 −1 0 1 2 3−60
−40
−20
0
|H(e
jω)|
dB
−3 −2 −1 0 1 2 3
−2
0
2
∠ H
(ejω
)
hat(ω)
32---
50–
1 dB
2=
H z H z =
0.01943 0.02111z1–
0.03771z2–
0.03771z3–
0.02111z4–
0.01943z5–
+ + + + +
1 2.7580z1–
– 4.0110z2–
3.3711z3–
– 1.6542z4–
0.3796z5–
–+ +----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------
ECE 2610 Signals and Systems 8–47

Example of an IIR Lowpass Filter
ECE 2610 Signals and Systems 8–48