i p-resonant control for the neutral point of three
TRANSCRIPT

i
P-RESONANT CONTROL FOR THE NEUTRAL POINT OF THREE PHASE
INVERTER
OMAR ALI OMAR AASHOUR
A thesis report submitted in partial
fulfillment of the requirement for the award of the
Degree of Master of Electrical and Electronic Engineering
Faculty of Electrical and Electronic Engineering
Universiti Tun Hussien Onn Malaysia
July, 2014

v
ABSTRACT
In this project, a Proportional resonant (PR) current controller is proposed to
maintain a balanced neutral point for a three-phase four wire inverter, which can be
used in microgrid applications. The neutral-point circuit consists of a conventional
neutral leg and a split DC link. The neutral point is balanced with respect to the two
DC source terminals (as required, in neutral-point clamped three-level converters)
even when the neutral current is large so that the inverter can be connected to an
unbalanced load. The controller, designed by using the Proportional resonant control
techniques, which attain eliminate for the current flowing through the split
capacitors. This leads to very small variation of the neutral point from the mid-point
of the DC source, in spite of the possibly large neutral current. The simulation of
inverter circuit, neutral-point and P-resonant has been performed using
MATLAB/SIMULINK software. The simulation results confirm the validity of the
proposed method, which can be seen as a promising that ensure P-resonant control
suitable for microgrid applications.

vi
ABSTRAK
Dalam projek ini, satu “Kadavan Hunan” pengawal arus bertujuan untuk
mengekalkan titik neutral seimbang untuk tiga fasa empat wayar penyongsang, yang
boleh digunakan dalam aplikasi microgrid. Litar pada titik neutral terdiri daripada
kaki neutral konvensional dan kepada sambungan perpecahan di DC. Titik neutral
adalah seimbang diantara dua terminal sumber pada DC (seperti yang dikehendaki,
dalam penukar tiga tahap titik cengkam neutral) walaupun semasa neutral adalah
besar supaya penyongsang boleh disambungkan kepada beban yang tidak seimbang.
Pengawal direka menggunakan teknik kawalan salunan berkadar, yang akan
menghapuskan arus yang melalui diantara celahan kapasitor. Keadaan ini akan
membawa kepada perubahan yang sangat kecil di titik neutral dari titik pertengahan
sumber DC, walaupun semasa neutral arusnya berkeadaan tinggi. Simulasi litar
penyongsang, titik neutral dan P-salunan telah dilakukan dengan menggunakan
perisian MATLAB / SIMULINK. Keputusan simulasi mengesahkan kesahihan
kaedah yang dicadangkan, yang boleh dilihat sebagai satu cara untuk memastikan
kawalan P-salunan sesuai untuk aplikasi microgrid.

ii
CONTENTS
ABSTRACT i
CONTENTS ii
LIST OF FIGURES iii
CHAPTER 1 INTRODUCTION
1.1 Project Background 1
1.2 Problem statement 3
1.3 project Objective 4
1.4 Scope of project 4
CHAPTER 2 LITERATURE REVIEW
2.1 Introduction 5
2.2 Inverters 5
2.2.1 Voltage Source Inverter 6
2.2.2 Current Source Inverter 7
2.3.1 Three-Phase Inverter 7
2.3.2 Sinusoidal PWM in Three-Phase Voltage Source
Inverters 9
2.3.3 Neutral point connection 11
2.3.3.1 The split DC link 12
2.3.3.2 Additional neutral leg 13

ii
2.3.3.3 The combination of first topology
and second topology 14
2.4 Controller 15
2.4.1 Open-loop control systems 15
2.4.2 Closed-loop control systems 15
2.5 Controllers for neutral point application 17
2.5.1 P Controller 18
2.5.2 PD Controller 18
2.5.3 Proportional integral controller 19
2.5.4 PID controller 20
2.5.5 Fuzzy logic controller 21
2.5.6 Control 23
2.6 P+Resonant controller 25
2.7 Three Phase Inverter in P+resonant 27
CHAPTER 3: METHODOLOGY
3.1 Introduction 28
3.2 Project block diagram 30
3.3 Generate SPWM switching using MATLAB Simulink 31
3.4 Inverter circuit design using MATLAB Simulink 32
3.5 Modeling of the neutral line circuit 33
CHAPTER 4: RESULT AND ANALYSIS
4.1 Introduction 37
4.2 System design and simulation 37
4.3.1 DC source model 38
4.3.2 The companion of neutral point leg and split of DC link
Model 39

ii
4.3.3 Three phase inverter controller model 40
4.3.4 P+ resonant current controller model 40
4.4 Software simulation results 41
4.4.1 Data simulation results 41
4.4.1.1 At reference current = 0 41
4.4.1.2 At reference current = 2 45
4.4.1.1 At reference current = 5 47
CHAPTER 5: CONCLUSION AND RECOMMENDATION
5.1 Project Conclusion 50
5.2 Recommendation 50
REFERENCES 52

x
LIST OF FIGURES
2.1 Voltage Source Inverter 6
2.2 Current Source Inverter (CSI) 7
2.3 Three-Phase Half Bridge Inverter 7
2.4 Three-phase Full –Bridge Inverter 8
2.5 Block diagram for generation of SPWM pulses 8
2.6 PWM illustration by the sine-triangle comparison method 9
2.7 Carrier & Reference Waveform along with the pulses of Sinusoidal
Pulse Width Modulation 10
2.8 Three-phase inverter network 11
2.9 The split DC link 12
2.10 Additional neutral leg 13
2.11 The combination 13
2.12 Open loop control system 14
2.13 Block diagram of a closed loop control system 15
2.14 Closed loop control system 16
2.15 Basic control systems 16
2.16 PI controller block diagram 18
2.17 A block diagram of a PID controller in a feedback loop 20
2.18 Fuzzy logic controller 21

xi
2.19 The standard optimal control problem 23
2.20 P-resonant controller 23
2.21 Inverter current mode controller block diagram 24
2.22 Frequency response characteristic of the open loop P-resonant
Controller 26
3.1 Project flow chart 28
3.2 Project block diagram 29
3.3 Flowchart of Generate SPWM switching using MATLAB Simulink 30
3.4 Flowchart of designing inverter circuit using MATLAB Simulink 32
3.5 Circuit topologies to generate a neutral 32
3.6 The firing pulse p and the inductor voltage 34
3.7 The block diagram of the neutral leg 35
4.1 System design and simulation 38
4.2 The DC source 38
4.3 The companion of neutral point leg and split of DC link model 39
4.4 Three phase inverter controller model 39
4.5 P-resonant current control and Pulse Withed Modulation (PWM) 40
4.6 P- resonant current control 40
4.7 Simulation open loop neutral point three phase inverter by using
MATLAB software 41
4.8 Output current for open loop circuit neutral point three phase inverter 42
4.9 Output voltage for open loop circuit neutral point three phase inverter 42
4.10 Capacitor current for open loop circuit neutral point three phase inverter 43
4.11 Inductor current for open loop circuit neutral point three phase inverter 43
4.12 Comparison of currents ( , and ) when: reference Current = 0A 45
4.13 Waveform of control signal of p-resonant controller when
reverence value =0 46

xii
4.14 Waveform of generate two pulses PWM when reverence value =0 46
4.15 Three phase current load Iabc 47
4.16 Three phase voltage load Vabc 47
4.17 Comparison of currents ( , and ) when: reference Current = 2 49
4.18 Three phase current load Iabc 49
4.19 Three phase voltage load Vabc 50
4.20 Comparison of currents ( , and ) when: reference Current = 5 51
4.21 Three phase current load Iabc 52
4.22 Three phase voltage load Vabc 52

xiii
LIST OF SYMBOLS AND ABBREVIATIONS
DC direct current
AC alternating current
VFI voltage fed inverter
VSI voltage source inverter
CSI Current source inverter
PR Proportional Resonant
PWM Pulse Width Modulation
ASDs adjustable speed drives
SPWM sinusoidal pulse-width modulation
VSCs voltage-source converters
PI Proportional integral
PID Proportional Integral Derivative
PD Proportional Derivative
FLC Fuzzy logic controller
SVM Space Vector Modulation

CHAPTER 1
INTRODUCTION
1.1 Project Background
A power inverter is an electrical power converter that changes direct current (DC) to
alternating current
(AC); the converted AC can be at any required voltage and frequency with the use
of appropriate transformers, switching, and control circuits [1]. A typical power
inverter device or circuit will require a relatively stable DC power source capable of
supplying enough current for the intended overall power handling of the inverter.
Possible DC power sources include: rechargeable batteries, DC power supplies
operating off of the power company line, and solar cells. The inverter does not
produce any power, the power is provided by the DC source. The inverter translates
the form of the power from direct current to an alternating current waveform. The
level of the needed input voltage depends entirely on the design and purpose of the
inverter. In many smaller consumer and commercial inverters a 12V DC input is
popular because of the wide availability of powerful rechargeable 12V lead acid
batteries which can be used as the DC power source. A power inverter device which
produces a smooth sinusoidal AC waveform is referred to as a sine wave inverter. To
more clearly distinguish from "modified sine wave" or other creative terminology,
the phrase pure sine wave inverter is sometimes used. In situations involving power
inverter devices which substitute for standard line power, a sine wave output is
extremely desirable because the vast majority of electric plug in products and
appliances are engineered to work well with the standard electric utility power which
is a true sine wave. At present, sine wave inverters tend to be more complex and

2
have significantly higher cost than a modified sine wave type of the same power
handling.
Three-phase inverters are used for variable-frequency drive applications and
for high power applications such as HVDC power transmission. A basic three-phase
inverter consists of three single-phase inverter switches each connected to one of the
three load terminals. For the most basic control scheme, the operation of the three
switches is coordinated so that one switch operates at each 60 degree point of the
fundamental output waveform. This creates a line-to-line output waveform that has
six steps. The six-step waveform has a zero-voltage step between the positive and
negative sections of the square-wave such that the harmonics that are multiples of
three are eliminated as described above. When carrier-based PWM techniques are
applied to six-step waveforms, the basic overall shape, or envelope, of the waveform
is retained so that the harmonic and its multiples are cancelled[2].
Inverters can be broadly classified into two types, voltage source and
current source inverters. A voltage fed inverter (VFI) or more generally a voltage–
source inverter (VSI) is one in which the DC source has small or negligible
impedance. The voltage at the input terminals is constant. A current–source
inverter (CSI) is fed with adjustable current from the DC source of high
impedance that is from a constant DC source. A voltage source inverter
employing thyristors as switches, some type of forced commutation is required,
while the (VSI) made up of using GTOs, power transistors, power MOSFETs or
IGBTs, self-commutation with base or gate drive signals for their controlled turn-
on and turn-off.
Since the neutral point of an electrical supply system is often connected to
neutral, under certain conditions, a conductor used to connect to a system neutral is
also used for grounding of equipment and structures. Current carried on a grounding
conductor can result in objectionable or dangerous voltages appearing on equipment
enclosures, so the installation of grounding conductors and neutral conductors is
carefully defined in electrical regulations. Where a neutral conductor is used also to
connect equipment enclosures to earth, care must be taken that the neutral conductor
never rises to a high voltage with respect to local ground.
Proportional Resonant (PR) controller gained a large popularity in recent
years in current regulation of grid-tied systems. It introduces an infinite gain at a
selected resonant frequency for eliminating steady-state error or current harmonics at

3
that frequency. However the harmonic compensators of the proportional resonant
controllers are limited to several low-order current harmonics, due to the system
instability when the compensated frequency is out of the bandwidth of the
systems[3].
1.2 Problem Statements
Many power electronics applications, such as Distributed Generation systems,
Uninterruptible Power Supplies or active filtering, employ an inverter feeding a star
connected three-phase load with accessible neutral terminal. The currents flowing on
each phase are generally not balanced so, if a transformer is not required, a
connection to the neutral terminal should be provided by adding an extra wire to the
inverter.
The neutral line is usually needed to provide a current path for possible
unbalanced loads and the traditional six-switch inverter must be supplemented with a
neutral connection. If the neutral point of a four-wire system is not well balanced,
then the neutral-point voltage may deviate severely from the real midpoint of the DC
source. This deviation of the neutral point may result in an unbalanced or variable
output voltage, the presence of the DC component, larger neutral current or even
more serious problems. Thus, the generation of a balanced neutral point in a simple
and effective manner has become an important issue.
1.3 Project Objectives
i. To develop and simulate the neutral point connection for DC-AC inverter.
ii. To develop proportional resonant controller that suitable for neutral point
for three phase inverter.
iii. To have zero current flows for the capacitor link at neutral point.
1.4 Project Scopes
i. Modelling of three phase DC-AC inverter with neutral point connection that
will be modelled using MATLAB Simulink software.

4
ii. P-resonant control with Sinusoidal Pulse Width Modulation (SPWM)
technique will be used to control the switching signals for the switches at
neutral point connection
iii. Using the P-resonant control technique as controller to reduce the current
flow at capacitor link in neutral point using MATLAB.
CHAPTER 2
LITERATURE REVIEW
2.1 Introduction
This chapter is a general introduction to the neutral point of three phase inverter and
it also focus on proportional resonant controller. The basic components and their
detailed functions will be introduced and discussed.
2.2 Inverters
Inverters can be found in a variety of forms, including half bridge or full bridge,
single phase or three phases. In pulse width modulated (PWM) inverters the input
DC voltage is essentially constant in magnitude and the AC output voltage has
controlled magnitude and frequency. Therefore the inverter must control the
magnitude and the frequency of the output voltage. This is achieved by PWM of the
converter switches and hence such converters are called PWM converters.
The DC-AC inverters usually operate on Pulse Width Modulation (PWM)
technique. The PWM is a very advance and useful technique in which width of the
gate pulses are controlled by various mechanisms. PWM inverter is used to keep the
output voltage of the inverter at the rated voltage (depending on the user’s choice)
irrespective of the output load. In a conventional inverter the output voltage changes
according to the changes in the load. To nullify this effect of the changing loads, the
PWM inverter correct the output voltage by changing the width of the pulses and the
output AC depends on the switching frequency and pulse width which is adjusted

6
according to the value of the load connected at the output so as to provide constant
rated output.
2.2.1 Voltage Source Inverter
The type of inverter that most commonly used is voltage source inverter (VSI) where
AC power provides on the output side function as a voltage source. The input DC
voltage may be an independent source such as battery, which is called a ’DC link’
inverter. These structure are the most widely used because they naturally behave as
voltage source as required by many industrial application, such as adjustable speed
drives (ASDs), which are the most popular application of inverters Figure2.1 shows
the voltage source inverter. Single phase VSIs are used in low range power
application where the three phase VSIs is used in medium to high-power application.
The main purposes of three-phase VSIs are to provide a three-phase voltage source,
where the amplitude, phase and frequency of the voltage should be controllable [4].
Figure2.1: Voltage Source Inverter (VSI)
2.2.2 Current Source Inverter
Respectively, CSI the DC source appears as a constant current and the voltage is
changing with the load. The protection filter is normally a capacitance in parallel
with the DC source The main advantage of the current source inverter is that it
increases the voltage towards the mains itself. Figure 2.2 shows the current source
inverter [5].

7
Figure2.2: Current Source Inverter (CSI)
2.3.1 Three-Phase Inverter
The dc to ac converters more commonly known as inverters, depending on the type
of the supply source and the related topology of the power circuit, are classified as
voltage source inverters (VSIs) and current source inverters (CSIs). Three-phase
counterparts of the single-phase half and full bridge voltage source inverters are
shown in Figures 2.3 and 2.4. Single-phase VSIs cover low-range power applications
and three-phase VSIs cover medium to high power applications. The main purpose of
these topologies is to provide a three-phase voltage source, where the amplitude,
phase and frequency of the voltages can be controlled. The three-phase dc/ac voltage
source inverters are extensively being used in motor drives, active filters and unified
power flow controllers in power systems and uninterrupted power supplies to
generate controllable frequency and ac voltage magnitudes using various pulse width
modulation (PWM) strategies. The standard three-phase inverter shown in Figure 2.4
has six switches the switching of which depends on the modulation scheme. The
input dc is usually obtained from a single-phase or three phase utility power supply
through a diode-bridge rectifier and LC or C filter.
a
b
c
+ Van -
+ Vbn -
+ Vcn -
n+
O
C
C
S11
S12
S21
S22
VDC
Figure 2.3: Three-Phase Half Bridge Inverter

8
a
b
c
+ Van -
+ Vbn -
+ Vcn -
n+
O
S11
S12
S21
S22
S31
S32
VDC
Figure 2.4: Three-phase Full –Bridge Inverter
2.3.2 Sinusoidal PWM in Three-Phase Voltage Source Inverters
The voltage source inverter that use PWM switching techniques have a DC input
voltage ( = ) that is usually constant in magnitude. The inverter job is to take
this DC input and to give AC output, where the magnitude and frequency can be
controlled. There are several techniques of Pulse Width Modulation (PWM). The
efficiency parameters of an inverter such as switching losses and harmonic reduction
are principally depended on the modulation strategies used to control the inverter[6].
The sinusoidal pulse-width modulation (SPWM) technique produces a sinusoidal
waveform by filtering an output pulse waveform with varying width. A high
switching frequency leads to a better filtered sinusoidal output waveform. The
variations in the amplitude and frequency of the reference voltage change the pulse-
width patterns of the output voltage but keep the sinusoidal modulation. As shown in
Figure 2.5.
Figure 2.5: Block diagram for generation of SPWM pulses

9
As in the single phase voltage source inverters PWM technique can be used
in three-phase inverters, in which three sine waves phase shifted by 120° with the
frequency of the desired output voltage is compared with a very high frequency
carrier triangle, the two signals are mixed in a comparator whose output is high when
the sine wave is greater than the triangle and the comparator output is low when the
sine wave or typically called the modulation signal is smaller than the triangle. This
phenomenon is shown in Figure 2.6. As is explained the output voltage from the
inverter is not smooth but is a discrete waveform and so it is more likely than the
output wave consists of harmonics, which are not usually desirable since they
deteriorate the performance of the load, to which these voltages are applied [7].
Figure 2.6: PWM illustration by the sine-triangle comparison method (a) sine-
triangle comparison (b) switching pulses.
The gating signals can be generated using unidirectional triangular carrier
wave as shown in the Figure2.7 But a pulse width modulated inverter employing
pure sinusoidal modulation cannot supply sufficient voltage to enable a standard
motor to operate at rated power and rated speed. Sufficient voltage can be obtained
from the inverter by over modulating, but this produces distortion of the output

10
waveform. The linear output range of SPWM is restricted to 0.785 compared with six
step inverter. The non-linear region operation (over-modulation) is leading to large
amounts of sub carrier frequency harmonic currents, reduction in fundamental
voltage gain and switching device gate pulse dropping [8].
Figure 2.7: Carrier & Reference Waveform along with the pulses of Sinusoidal
Pulse Width Modulation
2.3.3 Neutral point connection
The principles for the physical layout of three phase inverters, also known as
voltage-source converters (VSC:s) are shown in Figure 2.8 The bridge is connected
to the DC-link, whose voltage is raw material in the creation of the three-phase
output voltage. The link voltage is from now on called dc-link. The mid potential of
the dc-link is defined as neutral

11
LOAD
Va
Vb
Vc
2
DCV
2
DCV
Figure 2.8: Three-phase inverter network.
Between the two poles of the dc link, the three half-bridges are connected. Each half
bridge has two power electronic switches. By switching them, between fully
conducting and fully blocking, the potentials of each half-bridge ( , , , with
respect to the mid potential of the dc link, can attain /2 ± .
This deviation of the neutral point may result in an unbalanced or variable
output voltage, the presence of the DC component, larger neutral current or even
more serious problems. Thus, the generation of balanced neutral point in a simple
and effective manner has become an important issue. The neutral-point circuit
consists of a conventional neutral leg and a split DC link. The neutral point is
balanced with respect to the two DC source terminals (as required, e.g., in neutral
point clamped three-level converters) even when the neutral current is large so that
the inverter can be connected to an unbalanced load and/or utility grid. Three
different circuit topologies have been widely used to generate a neutral point [9].
2.3.3.1 The split DC link
The first topology is a split DC link as shown in Figure 2.9, with the neutral point
clamped at half of the DC link voltage. Since the neutral current flows through
capacitors, high capacitance is necessary. Moreover, the neutral point usually shifts
following capacitors and/or switches differences. To improve performance of the
split DC link topology, different neutral point balancing strategies are reported,
usually using redundant states of the Space Vector Pulse Width Modulation
(SVPWM). In this solution, in is certainly the simplest one, but the three-phase

12
inverter turns into three independent single-phase inverters. As consequence, zero-
sequence harmonics are generated; moreover, specially when the load is unbalanced
or non-linear, a high voltage ripple over supply capacitors is produced by neutral
currents. A further limitation is represented by the maximum voltage value that the
amplitude of each phase fundamental harmonic can reach. The main drawback is that
the neutral point balancing is not fully decoupled from the three-phase converter
control.
R
S
T
~
~
~
neutral
iN
Th
ree
ph
ase
leg
s
(+ L
C F
ilte
rs) C
DC
Po
wer
su
pp
ly
VDC
V+
V-
To
lo
ads
and
s an
d/o
r g
rid
C
Figure 2.9: the split DC link
In a three-level NPC inverter, the capacitors splitting neutral point voltage
has to maintain half bus voltage with respect to either positive or negative bus.
However, the variation of neutral point voltage is inevitable especially when the
neutral current is compensated [10].
2.3.3.2 Additional neutral leg
The second topology shown in Figure 2.10 is an additional fourth leg, called the
neutral leg, is added to a conventional three leg converter. Various control strategies
are available for this topology, however the additional neutral leg again cannot be
fully independently controlled to maintain a stable neutral point.

13
R
S
T
~
~
~
neutral
LN
C
S7
S8
DC
Pow
er s
upply
VDC
V+
V-
To l
oad
s an
ds
and
/or
gri
d
Thre
e phas
e le
gs
(+ L
C F
ilte
rs)
Figure 2.10: additional neutral leg
2.3.3.3 The combination of first topology and second topology.
The third topology, an actively balanced split DC link topology shown in Figure
2.11, is the combination of the first two (split DC link and the additional neutral
leg).The control of the neutral point in this case can be decoupled from the control of
the three phase converter [11].
R
S
T
~
~
~
neutral
iL LNiN
N
ic
Thre
e phas
e le
gs
(+ L
C F
ilte
rs) CN
CN
uN
S7
P
P
S8
DC
Pow
er s
upply
VDC
V+
V-
To l
oad
s an
ds
and
/or
gri
d
Figure 2.11: The combination of .2.9: and 2.10: the actively balanced split DC link

14
2.4 Controller
2.4.1 Open-loop control systems
An open-loop control system is designed to meet the desired goals by using a
reference signal that drives the actuators that directly control the process output.
Output feedback is not present in this type of system. Figure 2.12 shows the general
structure of an open-loop control system. A few examples of open-loop control
systems are bread toasters, ovens, washing machines and water sprinkler systems.
Figure 2.12: Open loop control system
Open-loop control systems are in general relatively simple in design and
inexpensive. However, can be inefficient and require frequent operator intervention.
Under many circumstances pre-set values become incorrect due to the parameter they
are controlling changing in some way, and so they need resetting. The pre-set value
often needs a high level of skill or judgement to set it correctly. In cases where the
consequences of the system not controlling the parameter as desired are serious, such
as the level of a hazardous liquid in a tank overflowing, open-loop systems are not
suitable [12].
2.4.2 Closed-loop control systems.
In a closed-loop control system, the state of the output directly affects the input
condition. A closed-loop control system measures the value of the parameter being
controlled at the output of the system and compares this to the desired value.
Sometimes, may use the output of the control system to adjust the input signal. This
is called feedback. Feedback is a special feature of a closed loop control system. A
closed loop control system compares the output with the expected result or command
15
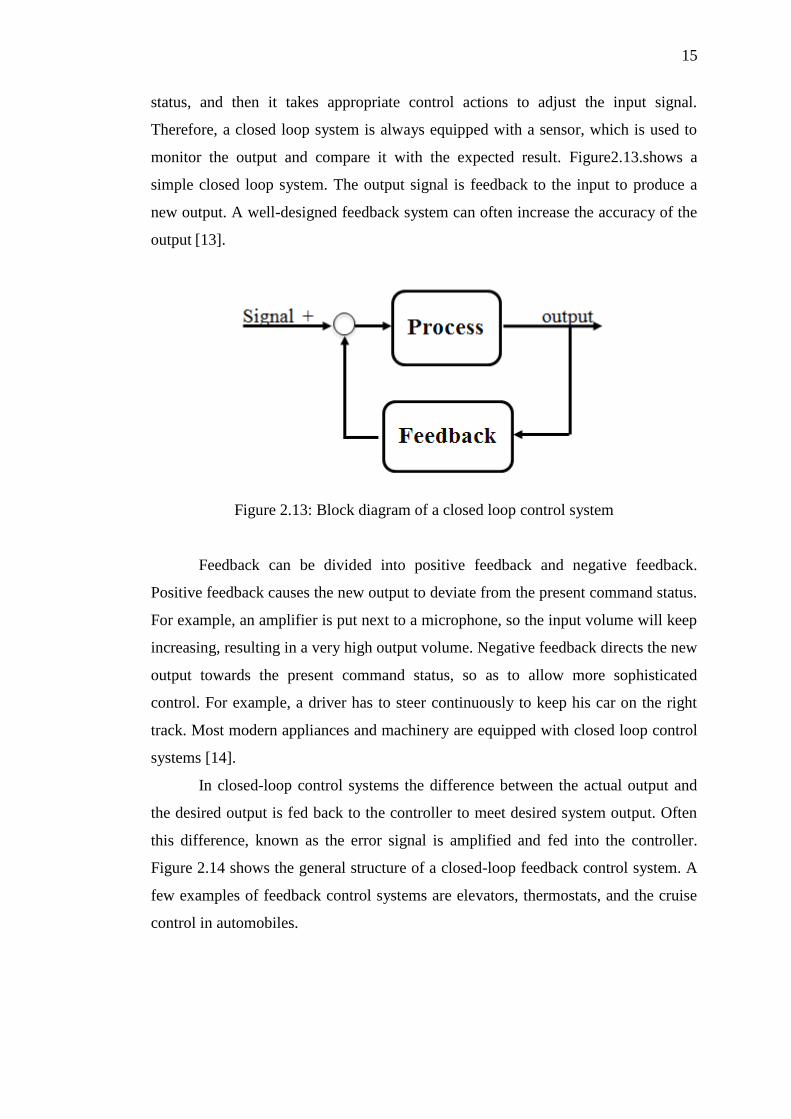
status, and then it takes appropriate control actions to adjust the input signal.
Therefore, a closed loop system is always equipped with a sensor, which is used to
monitor the output and compare it with the expected result. Figure2.13.shows a
simple closed loop system. The output signal is feedback to the input to produce a
new output. A well-designed feedback system can often increase the accuracy of the
output [13].
Figure 2.13: Block diagram of a closed loop control system
Feedback can be divided into positive feedback and negative feedback.
Positive feedback causes the new output to deviate from the present command status.
For example, an amplifier is put next to a microphone, so the input volume will keep
increasing, resulting in a very high output volume. Negative feedback directs the new
output towards the present command status, so as to allow more sophisticated
control. For example, a driver has to steer continuously to keep his car on the right
track. Most modern appliances and machinery are equipped with closed loop control
systems [14].
In closed-loop control systems the difference between the actual output and
the desired output is fed back to the controller to meet desired system output. Often
this difference, known as the error signal is amplified and fed into the controller.
Figure 2.14 shows the general structure of a closed-loop feedback control system. A
few examples of feedback control systems are elevators, thermostats, and the cruise
control in automobiles.

16
Figure 2.14: Closed loop control system.
2.5 Controllers for neutral point application
PID controllers use a three basic behaviour types or modes: P - proportional, I -
integrative and D - derivative. While proportional and integrative modes are also
used as single control modes, a derivative mode is rarely used on its own in control
systems. Combinations such as PI and PD control are very often in practical systems
Figure 2.15: basic control systems
2.5.1 P Controller
In general can say P controller cannot stabilize higher order processes. For order
processes, the meaning of processes with one energy storage, a large increasing the
gain can be tolerated. Proportional controller can stabilize only 1st order unstable
process. Therefore, can change the gain of controlled can change closed loop system.

17
And large gain of controlled will result in control system with steady state error is
small, better reference following, Faster dynamics, broader signal frequency band of
the closed loop system and larger sensitivity with respect to measuring noise, and
Phase margin and smaller amplitude.
When P controller is used, there will be a dire need to have a large gain to
large gain to improve steady state error. Stable systems do not have problems when
large gain is used. Such systems are systems energy storage ( order capacitive
systems).If steady state error is constant can be accepted with such processes, than P
controller can be used. Small steady state errors can be accepted if sensor will give
measured value with error or if importance of measured value is not too great
anyway [15].
2.5.2 PD Controller
D is used when prediction of the error can improve control or when it necessary to
stabilize the system. From the frequency characteristic of D element it can be seen
that it has phase lead of 90°
To avoid effects of the sudden change of the reference input that will cause
sudden change in the value of error signal. That is why is not taken from the error
signal but from the system output variable. Sudden change in error signal will cause
sudden change in control output. To avoid that it is suitable to design D mode to be
proportional to the change of the output variable.
Always PD control used for moving objects such are flying and underwater
vehicles, ships, rockets etc.
2.1
2.5.3 Proportional integral controller
A Proportional Integral (PI) control is a special case of the classic controller family
known as Proportional Integral Derivative (PID). These types of controllers are up to
date the most common way of controlling industry processes in a feedback
configuration. More than 95% of all installed controllers are PID [16]. PI controller
has some disadvantages such as: high starting overshoot, sensitivity to controller

18
gains and sluggish response due to sudden load disturbance. A PI controller is a
controller that produces proportional plus integral control action. The PI controller
has only one input and one output. The output value increases when the input value
increases. Figure 2.16 shows the Proportional-Integral (PI) controller block diagram.
Figure 2.16: PI controller block diagram
PI control is a traditional linear control method used in industrial
applications. The linear PI controller controllers are usually designed for dc-ac
inverter and dc-dc converters using standard frequency response techniques and
based on the small signal model of the converter. A Bode plot is used in the design to
obtain the desired loop gain, crossover frequency and phase margin. The stability of
the system is guaranteed by an adequate phase margin. However, linear PID and PI
controllers can only be designed for one nominal operating point. A boost
converter’s small signal Model changes when the operating point varies. The poles
and a right-half plane zero, as well as the magnitude of the frequency response, are
all dependent on the duty cycle. Therefore, it is difficult for the PID controller to
respond well to changes in operating point. The PI controller is designed for the
boost converter for operation during a start-up transient and steady state respectively
[17].
2.2

19
2.5.4 PID controller
Proportional-integral-derivative controller (PID controller) is a generic control loop
feedback mechanism (controller) widely used in industrial control systems. A PID
controller calculates an "error" value as the difference between a measured process
variable and a desired set point. The controller attempts to minimize the error by
adjusting the process control inputs. Calculation (algorithm) involves three separate
constant parameters, and is accordingly sometimes called three-term control: the
proportional, the integral and derivative values, denoted P, I, and D. Heuristically,
these values can be interpreted in terms of time: P depends on the present error, I on
the accumulation of past errors, and D is a prediction of future errors, based on
current rate of change. The weighted sum of these three actions is used to adjust the
process via a control element such as the position of a control valve, a damper, or the
power supplied to a heating element.
In the absence of knowledge of the underlying process, a PID controller
has historically been considered to be the best controller. By tuning the three
parameters in the PID controller algorithm, the controller can provide control
action designed for specific process requirements. The response of the controller
can be described in terms of the responsiveness of the controller to an error, the
degree to which the controller overshoots the set point and the degree of system
oscillation. Note that the use of the PID algorithm for control does not guarantee
optimal control of the system or system stability.
2.3

20
Figure 2.17: A block diagram of a PID controller in a feedback loop
2.5.5 Fuzzy logic controller
Fuzzy logic controller which is presented by Zadeh in 1965, is a new controller.
Besides that, fuzzy logic controller is more efficient from the other controller such as
proportional-integral (PI) controller [18]. Fuzzy Logic Control (FLC) technique has
been used for over twenty years with many successful applications. It is an ideal
technique for complex systems that are difficult to model or that present important
parameter variation. FLC design focuses in gaining a basic understanding of the plant
in order to design an appropriate set of rules that can be directly loaded into the fuzzy
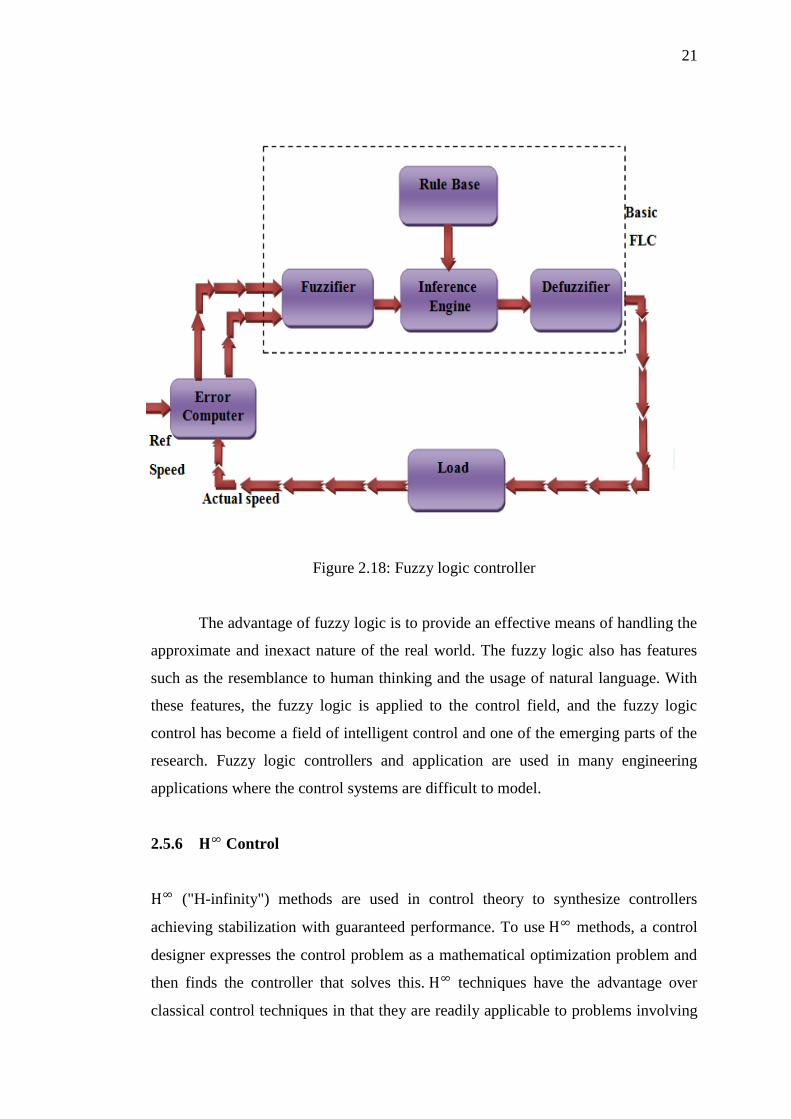
controller [19]. Figure 2.18 shows the basic structure of fuzzy logic controller. Fuzzy
logic’s linguistic terms are most often expressed in the form of logical implications,
such as If Then rules. These rules define a range of values known as fuzzy
membership functions [20].
21
Figure 2.18: Fuzzy logic controller
The advantage of fuzzy logic is to provide an effective means of handling the
approximate and inexact nature of the real world. The fuzzy logic also has features
such as the resemblance to human thinking and the usage of natural language. With
these features, the fuzzy logic is applied to the control field, and the fuzzy logic
control has become a field of intelligent control and one of the emerging parts of the
research. Fuzzy logic controllers and application are used in many engineering
applications where the control systems are difficult to model.
2.5.6 Control
("H-infinity") methods are used in control theory to synthesize controllers
achieving stabilization with guaranteed performance. To use methods, a control
designer expresses the control problem as a mathematical optimization problem and
then finds the controller that solves this. techniques have the advantage over
classical control techniques in that they are readily applicable to problems involving
22
multivariable systems with cross-coupling between channels; disadvantages of
techniques include the level of mathematical understanding needed to apply them
successfully and the need for a reasonably good model of the system to be controlled.
It is important to keep in mind that the resulting controller is only optimal with
respect to the prescribed cost function and does not necessarily represent the best
controller in terms of the usual performance measures used to evaluate controllers
such as settling time, energy expended, etc. Also, non-linear constraints such as
saturation are generally not well-handled.
The phrase control comes from the name of the mathematical space over
which the optimization takes place: is the space of matrix-valued functions that
are analytic and bounded in the open right-half of the complex plane defined by
Re(s) > 0; the norm is the maximum singular value of the function over that
space. (This can be interpreted as a maximum gain in any direction and at any
frequency; for SISO systems, this is effectively the maximum magnitude of the
frequency response). Techniques can be used to minimize the closed loop impact
of a perturbation: depending on the problem formulation, the impact will either be
measured in terms of stabilization or performance. Simultaneously optimizing robust
performance and robust stabilization is difficult. One method that comes close to
achieving this is loop-shaping, which allows the control designer to apply
classical loop-shaping concepts to the multivariable frequency response to get good
robust performance, and then optimizes the response near the system bandwidth to
achieve good robust stabilization. First, the process has to be represented according
to the following standard configuration. In this section the and repetitive control
techniques are brie y introduced and the former work of the voltage controller design
is presented. The methods are used in control theory to synthesise controllers
achieving robust performance or stabilisation. The optimal control theory is an
effective method to design a controller to guarantee the performance with the worst-
case disturbance. Its basic principle is to minimise the influence of the disturbances
to outputs.
The standard optimal control problem is shown in Figure 2.19 where
represents an external disturbance, is the measurement available to the controller,
is the output from the controller, and is an error signal that it is desired to keep
small.

23
Figure 2.19: the standard optimal control problem
The plant P has two inputs, the exogenous input w, that includes reference
signal and disturbances, and the manipulated variables u. There are two outputs; the
error signals z that we want to minimize, and the measured variables v, that we use to
control the system. v is used in c to calculate the manipulated variable u.
2.6 P-Resonant controller
This controller aims to get a good reference tracking and to reduce the output voltage
harmonic distortion when the inverter feeds linear and nonlinear loads. The resonant
controller is a generalized PI controller that is able to control not only DC but also
AC variables. Figure 2.20 shows the structure of the resonant controller [21].
Figure 2.20: P-resonant controller

24
In addition to a forward integrator there is another integrator in the feedback loop.
The transfer function is given by
2.4
Where represents the resonance frequency of the integrator corresponding
to the signal’s fundamental frequency, is the Proportional gain, is the integral
gain of the controller. Proportional resonant controllers have infinite gain on the
resonant frequency and so they can get zero steady state error on the stationary
frame. The general concepts of Proportional resonant controller for single phase and
three phase inverters are the same and the difference is how to perform the variable
transformation to the alpha-beta frame and then back to the main domain, if required.
Here after explaining the general proportional resonant controller strategy, it will be
shown how to calculate the current reference and do the required transformations for
three phase and single phase inverter.
Here
is the resonant part whose resonant frequency is at and is
the proportional part. The resonant part is able to provide a very high gain at and
around the resonant frequency which forces the error to become zero at steady state
[22].
Assuming that
in dq frame, its equivalent in stationary frame will be
[22]:
2.5
The current controller block is shown in figure. 2.21
Figure 2.21: Inverter current mode controller block diagram

55
REFERENCES
1. Holmes, D. Grahame, and Thomas A. Lipo. Pulse width modulation for power
converters: principles and practice. Vol. 18. Wiley-IEEE Press, 2003.
2. Zhang, Yu, Yong Kang, and Jian Chen. "The zero-sequence circulating currents
between parallel three-phase inverters with three-pole transformers and
reactors." Applied Power Electronics Conference and Exposition, 2006. APEC'06.
Twenty-First Annual IEEE. IEEE, 2006.
3. M. Aredes, J. H¨afner and K. Heumann. “Three-Phase Four-Wire ShuntActive Filter
Control Strategies,” IEEE Transactions on Power Electronics,Vol.12(2), March
1997, pp. 311-318
4. Rahman, Abdullah Al Mahfazur, and Muhammad Usman Sabbir. "Grid Code
Testing by Voltage Source Converter." (2012).
5. Xiaorong, Xie, Yan Gangui, and Chen Yuanhua. "Matlab simulation platform for
three-level PWM variable-frequency speed-governing control system." POWER
SYSTEM TECHNOLOGY-BEIJING- 27.9 (2003): 18-22.
6. Salam, Zainal, Abdul Aziz, and Mohd Junaidi. "The Design and Development of a
High Perfomance Bi-directional Inverter For Photovoltaic Application." (2003).
7. Babaei E, Hosseini SH, Gharehpetian G., “Reduction of THD and low order
harmonics with symmetrical output current for single-phase ac/ac matrix converters.”
International Journal of Electrical Power& Energy System2010 – Elsevier; Volume
32, Issue 3, March 2010, Pages 225–235. (Article)

56
8. J. Holtz, “Pulse width modulation for electronic power conversion,” Proc. IEEE, vol.
82, pp. 1194–1214, Aug. 1994
9. P. Dharmadhikari, G. Goyal. “ Analysis & Hardware Implementation Of Three-
Phase Voltage Source Inverter”, International Journal of Engineering Research &
Technology (IJERT) ISSN: 2278-0181, Vol. 2 Issue 5, May - 2013
10. Q.C. Zhong, J. Liang, G. Weiss, C. Feng, and T. Green, “H1 control of the neutral
point in four-wire three-phase DC-AC converters,” IEEE Transactions on Industrial
Electronics, vol. 53, no. 5, pp. 1594–1602,2006
11. . X. Yuan, G. Orglmeister, andW. Merk, “Managing the DC link Neutral Potential of
the three-phase-four-wire neutral-point-clamped (NPC) inverter in FACTS
Application,” in Proc. IEEE Ind. Electron. Soc. Conf., 1999, pp. 571–576.
12. R. Zhang, D. Boroyevich, V. H. Prasad, H. Mao, F. C. Lee, and S. Dubovsky,“Three-
phase inverter with a neutral leg with space vectormodulation,” in IEEE 12th
Applied Power Electronics Conference,vol. 2, Atlanta, GA, USA, Feb. 1997, pp.
857–863.
13. Hart, John K. Automatic control program creation using concurrent Evolutionary
Computing. Diss. Bournemouth University, 2004.
14. Aström, Karl Johan, and Richard M. Murray. Feedback systems: an introduction for
scientists and engineers. Princeton university press, 2010.
15. M.Ali Akcayol, Aydin Cetin, and Cetin Elmas, (November 2002), An Educational
Tool for Fuzzy Logic-Controlled BDCM, IEEE Transaction on Education, vol. 45,
no. 1.
16. Luis Alberto Torres Salomao, Hugo Gámez Cuatzin, Juan Anzurez Marín and Isidro
I.Lázaro Castillo, ”Fuzzy-PI Control, PI Control and Fuzzy Logic Control
Comparison Applied to a Fixed Speed Horizontal Axis 1.5 MW Wind Turbine”,

57
Proceedings of the World Congress on Engineering and Computer Science 2012 Vol
II WCECS 2012, pp. 978-988-19252-4-4.
17. Hanns, Michael. “A Nearly Strict Fuzzy Arithmetic for Solving Problems
withUncertainties.” Online posting. 14 Dec. 2002
18. K.J. Åström and T.H. Hägglund, “New tuning methods for PID
controllers”,Proceedings of the 3rd European Control Conference, 1995, p.2456–62.
19. Ortega, R., et al. "A PI-P+ Resonant controller design for single phase inverter
operating in isolated microgrids." Industrial Electronics (ISIE), 2012 IEEE
International Symposium on. IEEE, 2012.
20. R. Teodorescu, F. Blaabjerg, U. Borup, and M. Liserre. A new control structure for
grid-connected lcl pv inverters with zero steady-state error and selective harmonic
compensation. In Applied Power Electronics Conference and Exposition, 2004.
APEC ’04. Nineteenth Annual IEEE, volume 1, pages 580–586 Vol.1, 2004.
21. Y. Xiaoming and W. Merk, ”The non-ideal generalised amplitude integrator (NGAI):
interpretation, implementation and applications,” Power Electronics Specialist
Conference, 2001. PESC. 2001 IEEE 32nd Annual Volume 4, 17-21 June 2001
Pages(s): 1857 - 1861.
22. D. N. Zmood, and D. G. Holmes: Stationary Frame current regulation of PWM
inverters with zero steady-state error. IEEE Trans. Power Electrons Vol. 18 no.3, PP.
814-821, MAY 2003.
23. Qinglin Zhao, Xiaoqiang Guo, Weiyang Wu, “Research on control strategy for
single-phase grid-connected inverter,” Proceedings of the CSEE, vol. 27, pp. 60–64,
August 2007.
24. Zmood, D. N.; Holmes, D. G., “Stationary Frame Current Regulation of PWM
Inverters With Zero Steady-State Error”, in Proc. of Power Electronics Spec. Conf.,
vol. 2, 1999, pp 1185-1190

58
25. Roshan, A. “A DQ rotating frame controller for single phase fullbridge inverter used
in small distributed generation systems”, Master Thesis, Virginia Polytechnic
Institute, 2006.
26. Xiaoming Yuan, W. Merk, H. Stemmer, and J. Alleging. Stationary-frame
generalized integrators for current control of active power filters with zero steady-
state error for current harmonics of concern under unbalanced and distorted operating
conditions. Industry Applications, IEEE Transactions on, 38(2):523–532, Mar/Apr
2002.