griffiths methods in_oceanog_biog
TRANSCRIPT

Steps towards autonomy: From current measurements to underwater vehicles
Institute of Oceanographic Sciences, Wormley, 1976
Using Doppler sonar to measure speed of conveyor belt, MSc Birmingham, 1975
Underwater EM communication, Anglesey, 1970.
Gwyn Griffiths
1976-84: At-sea Instrument Technician & Investigations of Sensor Performance
Neil Brown MkIII CTD
John Smithers Dr Peter Collar
John Swallow

Basic principles understood:Assessing performance
GRIFFITHS, G & COLLA R, P.G., 1980 Some comparative studies on electromagn etic sensor heads
in laminar and near turbulent flows in a towing tank , pp 323-329 in Oceans '80 , New Yor k
I.E.E.E.

1980:4-level Surface Following Current Meter
P.G. Collar, R.M. Carson and G. Griffiths, 1982. Measurement of near-surface current from a moored wave-slope follower. Deep Sea Research 30 (1): 63-75.

Oban 1982: The smooth and the rough

Oban 1983
Water depth30m
Near Loch Etive outflow
Shear between 0.1 and 0.4m most of the time. Wind <3m/s.
Shear disappears Day 315 & Day 319-320.5, with periods of stronger wind ~7m/s.
Oh for 4 CT sensors!
Speed cm/s
GRIFFITHS, G., 1983 Near shore trials of a four level surfac e-follo wing cur rent mete r, Insititute of
Oceanographic Sciences Internal Docum ent No. 178, 11pp + appendices .

1984-1988: 1MHz Self Contained ADCPMk1 Mk2 inc.
GP Sonar Receiver
Board set64k memory24 bit h’ware multiplierReal time clockCPU and I/O8-channel 8 bit ADC20channel 12 but ADC
Solid state logger2MByte EPROM card
CPU-Memory-I/O
GRIFFITHS, G. 1990 A microco mputer syste m for use in oceanographic instruments. Unde rwater
Technology, 15(4) , 3-10 .

Other Applications of the Board Set

May 1985 Irish Sea Deployment
GRIFFITHS, G., 1986 Intercomparison of an acoustic Doppler current profiler with conventional instruments and a tidal flow model. Proc. IEEE 3rd Working Conference
on Current Measurement.

Acoustic Backscatter from an ADCP
30-day hand coloured contour section in 1986 of acoustic backscatter at the Celtic Sea shelf edge in the upper 20m in 186m water depth.

Towards biological interpretation

April 1993
Change from engineer and applied scientist to
Head Ocean Instrumentation Group

The true fathers of the Autosub Autonomous Underwater Vehicle
Dr Brian McCartney Dr Nic Flemming Dr Stuart Rusby
1984-1986at the Institute of Oceanographic Sciences, Wormley

People of Influence
Prof. John Woods Don Lennard
1986-1994

One Vision: To gather data within ocean cavities beneath floating ice sheets.
Polly
Wi ll
iam
son ,
IOS,
19 8
9

Capable Project Leaders
Dr Peter Collar Nick Millard Steve McPhail
1988-1995 1995-2005 2005-

Core Engineering Team
Peter Stevenson Miles Pebody Andy Webb James Perrett Maaten Furlong

Technical Support
Andy Kevin Mark Dave JimStaskiewicz Saw Squires White Wyatt

The Reviewers
Sir John Cadogan Sir John (later Lord) Krebs Prof John Shepherd
John Steele

Principal Investigators
David Smeed Andy Brierley Peter Wadhams Adrian Jenkins Karen Heywood
Julian Dowdeswell Chris German George Voulgaris Alex Cunningham Steve Thorpe
And others …
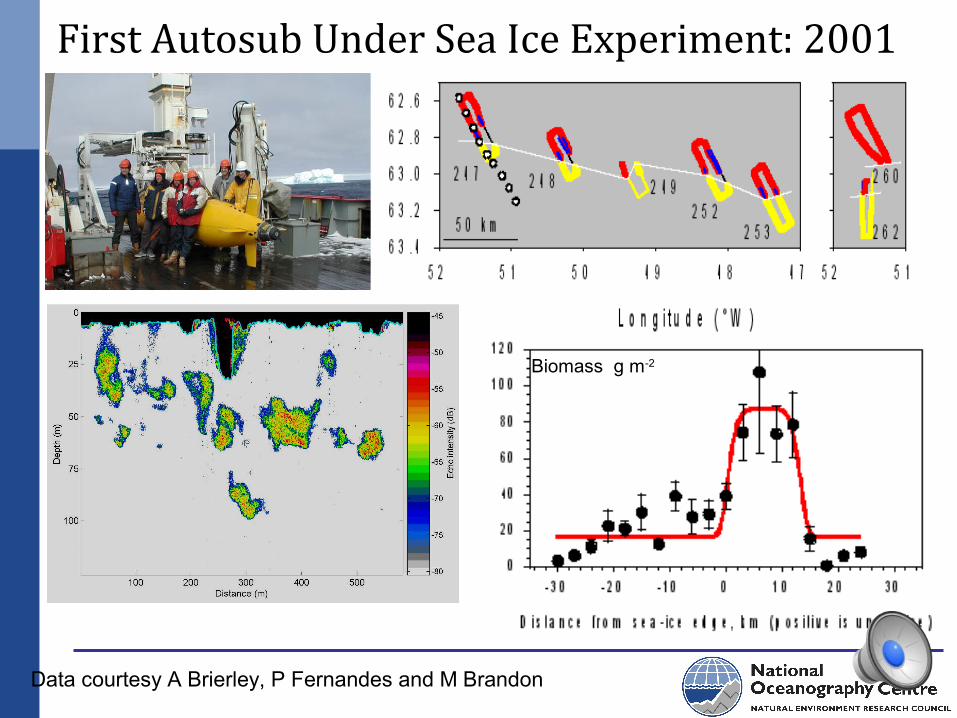
Biomass g m-2
First Autosub Under Sea Ice Experiment: 2001
Data courtesy A Brierley, P Fernandes and M Brandon

Autosub Under Ice Programme Shelf Ice
Formed from snow falling over Antarctica
Floating extensions of the continental ice sheet
Fate is biggest uncertainty for sea level rise
Thickness from 100 m to over 1500 m
Nic
k M
iIlla
r d

The Vision delivered: 2009.
Cour
tesy
Pie
rre
Dut
rieu x
, BA
S, 2
009
Temp (˚C)

Closing thoughts
My role in fostering major programmes for autonomous vehicle expeditions.
Initiating, despite opposition, new methods for risk of loss estimates for AUVs in polar seas.
The formation in April 2012 of the Marine Autonomous and Robotic Systems (MARS) facility at Southampton, with 3 Autosubs and 11 gliders.
A major capital investment from the Natural Environment Research Council to secure the future of MARS.