graphical' models' template'models'...
TRANSCRIPT

Daphne Koller
Overview'
Probabilis.c'Graphical'Models' Template'Models'
Representa.on'

Daphne Koller
Genetic Inheritance
Homer
Bart
Marge
Lisa Maggie
Clancy Jackie
Selma

Daphne Koller
Genetic Inheritance
GHomer
GBart
GMarge
GLisa GMaggie
GHarry GJackie
GSelma
BHarry BJackie
BSelma BHomer BMarge
BBart BLisa BMaggie

Daphne Koller
NLP Sequence Models

Daphne Koller
Image Segmentation

Daphne Koller
The University Example Difficulty
Grade
Intelligence
D(c1) D(cn) . . . I(s1) I(sm) . . .
G(c1,s1) G(cn,sm) . . . G(c1,sm) . . . G(cn,s1) . . .

Daphne Koller
Robot Localization
Fox, Burgard, Thrun

Daphne Koller
Robot Localization
x
z
u
x
z
u
2
2
x
z
u
... t
t
x 1
1
0
1 0 t-1 control signal
robot pose
sensor observation
map

Daphne Koller
Template Variables • Template variable X(U1,…,Uk) is
instantiated (duplicated) multiple times – Location(t), Sonar(t) – Genotype(person), Phenotype(person) – Label(pixel) – Difficulty(course), Intelligence(student),
Grade(course, student)

Daphne Koller
Template Models • Languages that specify how variables
inherit dependency model from template • Dynamic Bayesian networks • Object-relational models – Directed • Plate models
– Undirected

Daphne Koller
Temporal)Models)
Probabilis0c)Graphical)Models) Template)Models)
Representa0on)

Daphne Koller
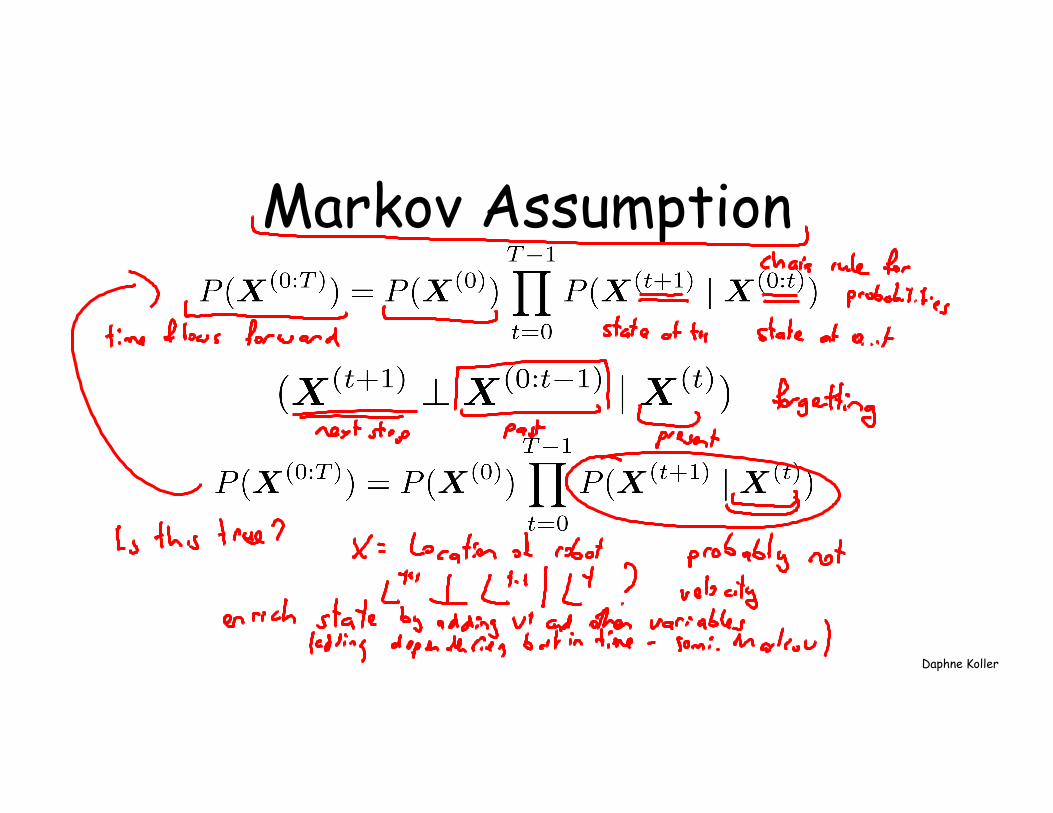
Distributions over Trajectories • Pick time granularity Δ • X(t) – variable X at time tΔ • X(t:t’) = {X(t), …, X(t’)} (t ≤ t’)
• Want to represent P(X(t:t’)) for any t, t’
0 1 2 3 4 5
Daphne Koller
Markov Assumption

Daphne Koller
Time Invariance • Template probability model P(X’ | X) • For all t:

Daphne Koller
Template Transition Model
Location’
Failure’
Obs’
Location
Failure
Time)slice)t" Time)slice)t+1"
Velocity Velocity’
Weather Weather’

Daphne Koller
Location0
Failure0
Time)slice)0"
Velocity0
Weather0
Obs0
Initial State Distribution

Daphne Koller
Location0
Failure0
Time)slice)0"
Velocity0
Weather0
Location1
Failure1
Obs1
Time)slice)1"
Velocity1
Weather1
Location2
Failure2
Obs2
Velocity2
Weather2
Time)slice)2"
Obs0
Ground Bayesian Network

Daphne Koller
2-time-slice Bayesian Network • A transition model (2TBN) over X1,…,Xn is
specified as a BN fragment such that: – The nodes include X1’,…,Xn’ and a subset of X1,…,Xn – Only the nodes X1’,…,Xn’ have parents and a CPD
• The 2TBN defines a conditional distribution

Daphne Koller
Dynamic Bayesian Network • A dynamic Bayesian network (DBN) over
X1,…,Xn is defined by a – 2TBN BN→ over X1,…,Xn – a Bayesian network BN(0) over X1
(0) ,…,Xn
(0)

Daphne Koller
Ground Network • For a trajectory over 0,…,T we define a
ground (unrolled network) such that – The dependency model for X1
(0) ,…,Xn
(0) is copied from BN(0)
– The dependency model for X1(t)
,…,Xn(t) for
all t > 0 is copied from BN→

Daphne Koller Huang, Koller, Malik, Ogasawara, Rao, Russell, Weber, AAAI 94
LeftClr
RightClr
LatAct
Xdot
FwdAct
Ydot
Stopped
EngStat
FrontBackStat
LeftClr’
RightClr’
LatAct’
Xdot’
FwdAct’
Ydot’
Stopped’
EngStat’
FrontBackStat’
InLane InLane’
SensOK’
FYdotDiff’
FcloseSlow’
BXdot’
BcloseFast’
BYdotDiff’
Fclr’
Bclr’
LftClrSens’
RtClrSens’
TurnSignal’
XdotSens’
YdotSens’
FYdotDiffSens’
FclrSens’
BXdotDiffSens’
BclrSens’
BYdotDiffSens’

Daphne Koller
Summary • DBNS are a compact representation for
encoding structured distributions over arbitrarily long temporal trajectories
• They make assumptions that may require appropriate model (re)design: – Markov assumption – Time invariance

Daphne Koller
Hidden&Markov&Models&
Probabilis1c&Graphical&Models& Template&Models&
Representa1on&

Daphne Koller
Hidden Markov Models S’
O’
S S1
O1
S0 S2
O2
S3
O3
s1 s2 s3 s4
0.5 0.5 0.7
0.3
0.4
0.6
0.1
0.9

Daphne Koller
Numerous Applications • Robot localization • Speech recognition • Biological sequence analysis • Text annotation

Daphne Koller
Robot Localization
o
u
o
u
(2)
o
u
... (t) (1) (0)
control signal
robot pose
sensor observation
map
S S S S
(t-1) (1) (0)
(2) (t) (1)

Daphne Koller
Speech Recognition
Dan Jurafsky, Stanford

Daphne Koller
Segmentation of Acoustic Signal
Dan Jurafsky, Stanford

Daphne Koller
Phonetic Alphabet
http://www.speech.cs.cmu.edu/cgi-bin/cmudict
• R read R IY D • S sea S IY • SH she SH IY • T tea T IY • TH theta TH EY T AH • UH hood HH UH D • UW two T UW • V vee V IY • W we W IY • Y yield Y IY L D • Z zee Z IY • ZH seizure S IY ZH ER
• AA odd AA D • AE at AE T • AH hut HH AH T • AO ought AO T • AW cow K AW • AY hide HH AY D • B be B IY • CH cheese CH IY Z • D dee D IY • DH thee DH IY • EH Ed EH D • ER hurt HH ER T • EY ate EY T • F fee F IY
• G green G R IY N • HH he HH IY • IH it IH T • IY eat IYT • JH gee JH IY • K key K IY • L lee L IY • M me M IY • N knee N IY • NG ping P IH NG • OW oat OW T • OY toy T OY • P pee P IY

Daphne Koller
Word HMM
Dan Jurafsky, Stanford

Daphne Koller
Phone HMM
Dan Jurafsky, Stanford

Daphne Koller Dan Jurafsky, Stanford
Recognition HMM

Daphne Koller
Summary • HMMs can be viewed as a subclass of DBNs • HMMs seem unstructured at the level of
random variables • HMM structure typically manifests in
sparsity and repeated elements within the transition matrix
• HMMs are used in a wide variety of applications for modeling sequences

Daphne Koller
Plate&Models&
Probabilis.c&Graphical&Models& Template&Models&
Representa.on&

Daphne Koller
Modeling Repetition
Outcome Tosses&t! Outcome(t1) Outcome(tk)
{t1, …, tk}
θ
. . .
Daphne Koller
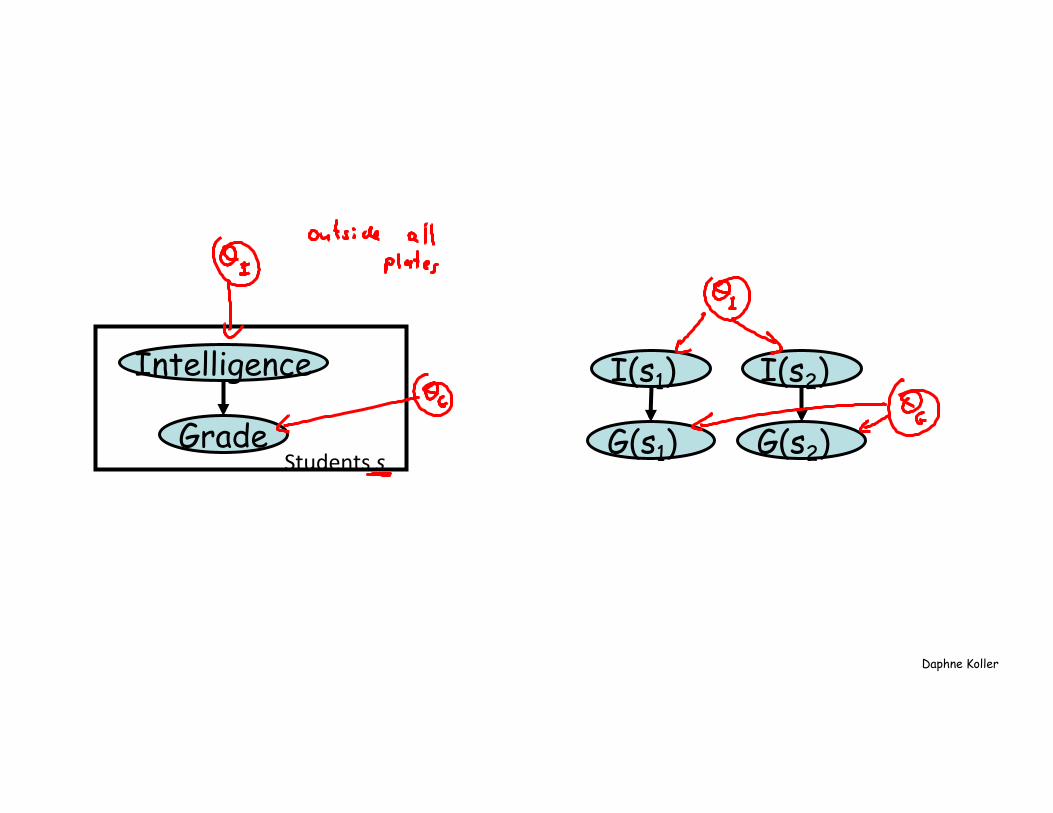
Grade
Intelligence
Students&s!G(s1)�
I(s1)�
G(s2)�
I(s2)�

Daphne Koller
Difficulty Courses&c&
Grade Intelligence
Students&s&
D(c1)�
G(s1,c1)�
I(s1,c1)�
G(s2,c1)�
I(s2,c1)�
D(c2)�
G(s1,c1)�
I(s1,c2)�
G(s2,c1)�
I(s2,c2)�
Nested Plates

Daphne Koller
Difficulty
Grade Courses&c&
Intelligence
Students&s&
D(c1)�
G(s1,c1)�
I(s1)� D(c2)� I(s2)�
G(s1,c2)� G(s2,c1)� G(s2,c2)�
Overlapping Plates

Daphne Koller
D(c1)�
G(s1,c1)�
I(s1)� D(c2)� I(s2)�
G(s1,c2)� G(s2,c1)� G(s2,c2)�
θI θG
θD
Explicit Parameter Sharing

Daphne Koller
Welcome&to&Geo101&
Welcome&to&CS101&
low&/&high&
Collective Inference
0% 50% 100%0% 50% 100%
A&
C&
low& high&
0% 50% 100%
easy&/&hard&

Daphne Koller
Plate Dependency Model • For a template variable A(U1,…,Uk): – Template parents B1(U1),…,Bm(Um)
– CPD P(A | B1,…, Bm)

Daphne Koller
Ground Network Let A(U1,…,Uk) with parents B1(U1),…,Bm(Um) • for any instantiation u1,…,uk to U1,…,Uk we
would have:
Daphne Koller
Plate Dependency Model Let A(U1,…,Uk) with parents B1(U1),…,Bm(Um) • For each i, we must have Ui ⊆ U1,…,Uk – No indices in parent that are not in child

Daphne Koller
Summary • Template for an infinite set of BNs, each
induced by a different set of domain objects • Parameters and structure are reused within
a BN and across different BNs • Models encode correlations across multiple
objects, allowing collective inference • Multiple “languages”, each with different
tradeoffs in expressive power