globe in terms of longitude and latitude. with the advent ... · circles of longitude are great...
TRANSCRIPT


Western navigation has evolved over the centuries into a highly technological field. Pre the digital age navigators used a sextant, an accurate chronometer, observations of celestial bodies and application of mathematics to determine their location on the globe in terms of longitude and latitude. With the advent of the satellite based ‘global positioning system’ we can instantly obtain our position within a few metres. Western navigation traditionally has comprised of two parts. 1. The ‘fix’. The fix involves using celestial navigation to ‘fix’ ones position in terms of longitude and latitude. A fix can be obtained whenever the sun, moon, planets or stars AND the horizon are visible. Often, whilst at sea, the sky can be obscured by cloud and poor weather for days on end. 2. Dead Reckoning. In between fixes, one’s position is plotted and estimated using compass and log. Using GPS you can know your position without having to even look out the window. Western navigation takes on a ‘person centric’ (I’m here…I’m here…I’m here) approach vs Pacific’s more holistic approach

Pacific wayfinding is ALL about ‘looking out the window’. Its holistic approach involves the navigator making constant observations, assimilating this data and thereby determining an approximation of his present position plus the course to be sailed to his destination. The Pacific Navigator, while not a mathematician in the traditional western sense that involves formulae and algebraic abstractions, is a master mathematician in terms of of spatial awareness. The Western navigator is orientated by his compass, charts and instruments. Without his technology the Western navigator will soon be lost. The Pacific navigator operates independently of technology. He is orientated by his observations of everything around him - wildlife, sea/wind conditions, stars, and geography.
The ships’ position is determined and located on a chart. This position is known as the ‘Fix’. The Fix is obtained by either: a. Location e.g. a Port b. Triangulation from known landmarks c. Celestial Navigation (sextant) d. Global Positioning System Between subsequent fixes the ship’s position is estimated using ‘Dead Reckoning’

Dead reckoning is the process of determining one’s position by using a previously determined position (the fix), and advancing
that position based upon vessel’s speed, elapsed time (distance = speed x time) and course.
The ‘fix’

Distance covered is determined using a ship’s log. Initially the log was a piece of wood called a ‘chip log’ attached to a line that was knotted at regular intervals. The log was thrown overboard acting as a sea anchor dragging the line out. Over a set period of time the number of knots passing through the sailor’s hand was counted. Each knot represented a speed of 1 nautical mile (nm) per hour.

The taffrail, or ‘patent’ log, superseded the chip log. The log was dragged behind the ship. The vanes were offset causing the log to rotate. The number or rotations were counted and converted to a distance covered (similar to an odometer in a car). Modern vessels now use electronic logs and GPS

The ship’s course/direction of travel is determined using a compass The magnetic compass uses a magnetized needle which aligns itself with the Earth’s magnetic field lines. The magnetic north pole is not coincident with the geographic north pole. It is currently in Greenland. Hence in NZ the compass needle points in the direction of ‘magnetic north’ that is approximately 20° to the the east of ‘true north’. This magnetic variation changes both with time and position on Earth.
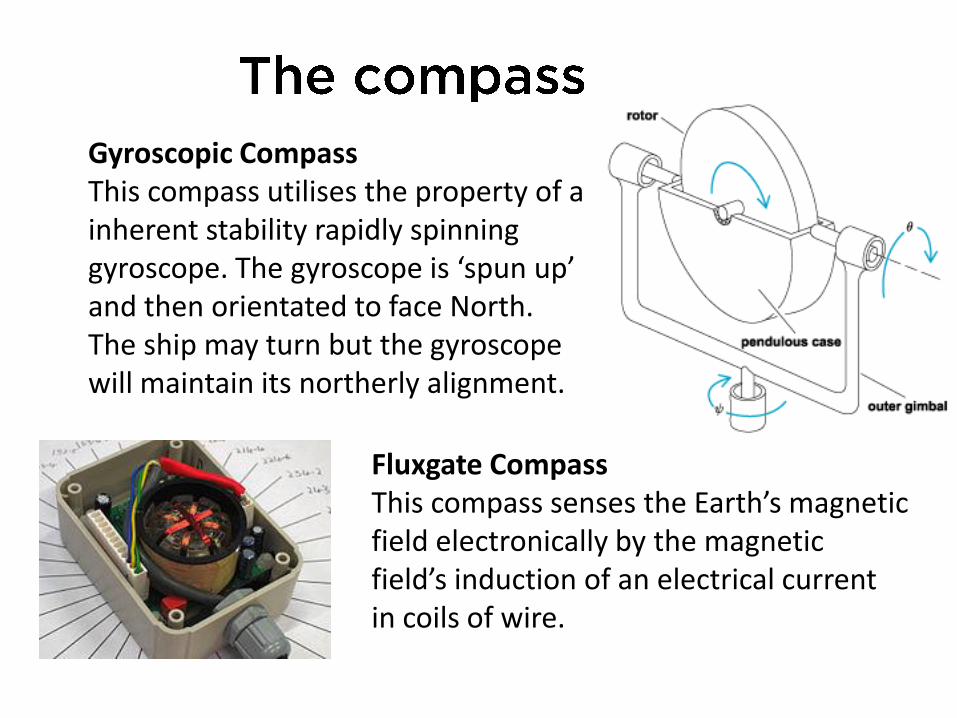
Gyroscopic Compass This compass utilises the property of a inherent stability rapidly spinning gyroscope. The gyroscope is ‘spun up’ and then orientated to face North. The ship may turn but the gyroscope will maintain its northerly alignment.
Fluxgate Compass This compass senses the Earth’s magnetic field electronically by the magnetic field’s induction of an electrical current in coils of wire.
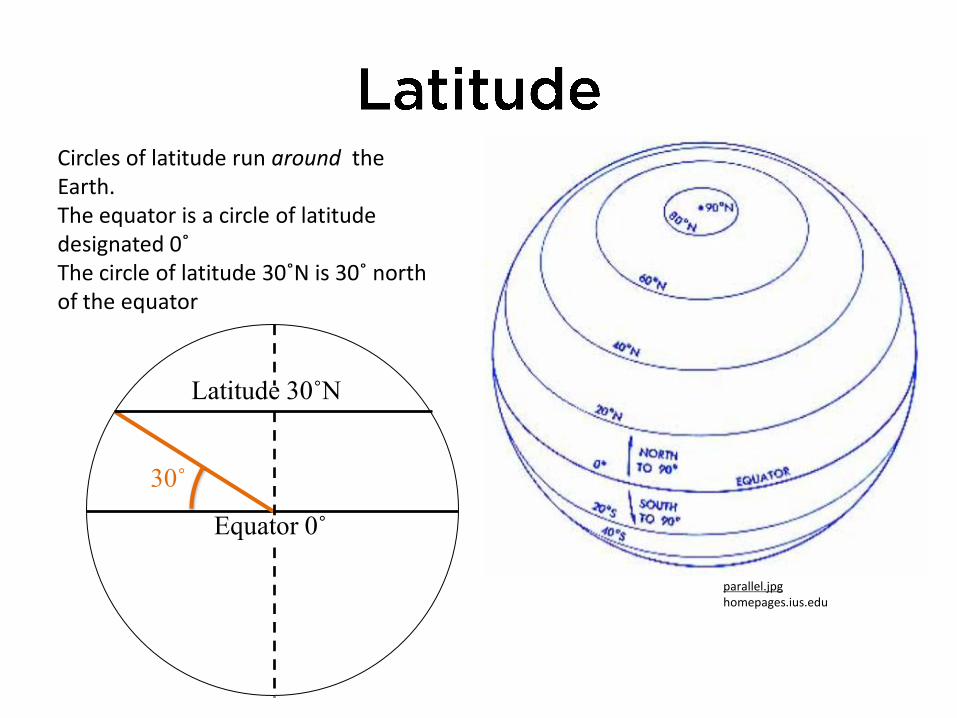
Circles of latitude run around the Earth. The equator is a circle of latitude designated 0˚ The circle of latitude 30˚N is 30˚ north of the equator
30˚
Latitude 30˚N
Equator 0˚
parallel.jpg homepages.ius.edu

In the northern hemisphere the Pole Star (Polaris) was used to determine an observer’s latitude. Polaris is located near the ‘Northern Celestial Pole’, the northern point about which the universe appears to rotate. Hence it is a stationary point in the night sky. At the North Pole Polaris will appear directly overhead i.e. it will have an altitude of 90°. At the Equator Polaris will be sitting on the horizon with an altitude of 0°. Early European sailors would sail ‘down’ the Atlantic until they reached the latitude of their destination and then sail that latitude till land is sighted. Measurement of the altitude of Polaris and hence latitude was accomplished using: a. Notched staff held at arm’s length b. Cross-staff c. Back staff d. Octant and sextant

The altitude is the angle between sun and horizon The zenith is the point directly above the observer’s head. The zenith angle is the angle between the sun and the zenith (the vertical) Given the zenith angle of the sun for a particular day and using sight reduction tables, the observer’s latitude can be determined
Latitude
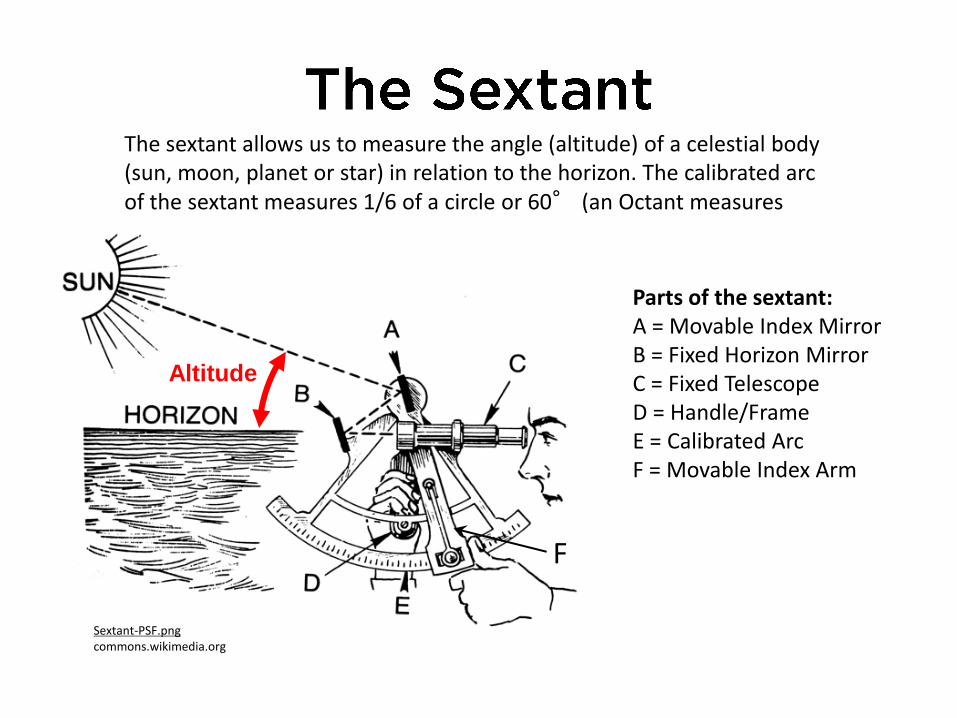
Parts of the sextant: A = Movable Index Mirror B = Fixed Horizon Mirror C = Fixed Telescope D = Handle/Frame E = Calibrated Arc F = Movable Index Arm
The sextant allows us to measure the angle (altitude) of a celestial body (sun, moon, planet or star) in relation to the horizon. The calibrated arc of the sextant measures 1/6 of a circle or 60° (an Octant measures 1/8) circle)
Altitude
F
Sextant-PSF.png commons.wikimedia.org

Circles of longitude are great circles drawn ‘vertically’ around the earth, each passing through the two poles. The ‘prime meridian’ is the circle of longitude designated 0˚ that passes through Greenwich, England. The circle of longitude 030˚E is 30˚ east of the prime meridian. Great Circles all have the same diameter (the diameter of Earth) The shortest path between any two points (A & B) on the surface of the globe will follow a great circle route.
B
A
meridian.jpg homepages.ius.edu

To determine longitude we must be able to accurately determine the time at Greenwich (GMT or UT) . As the sun takes 24 hours to ‘circle’ the earth, if we can determine the time the sun reaches its zenith (highest point in the sky) we can determine how many hours (and hence degrees) we are east, or west, of the Prime Meridian (Greenwich Meridian) . In 1735 John Harrison designed the first clock capable of keeping accurate time during the changing weather and climatic conditions encountered on a voyage. Using Harrison’s timepiece navigators could Accurately determine their longitude.
The Harrison Escarpment
Harrison’s No.4 Clock
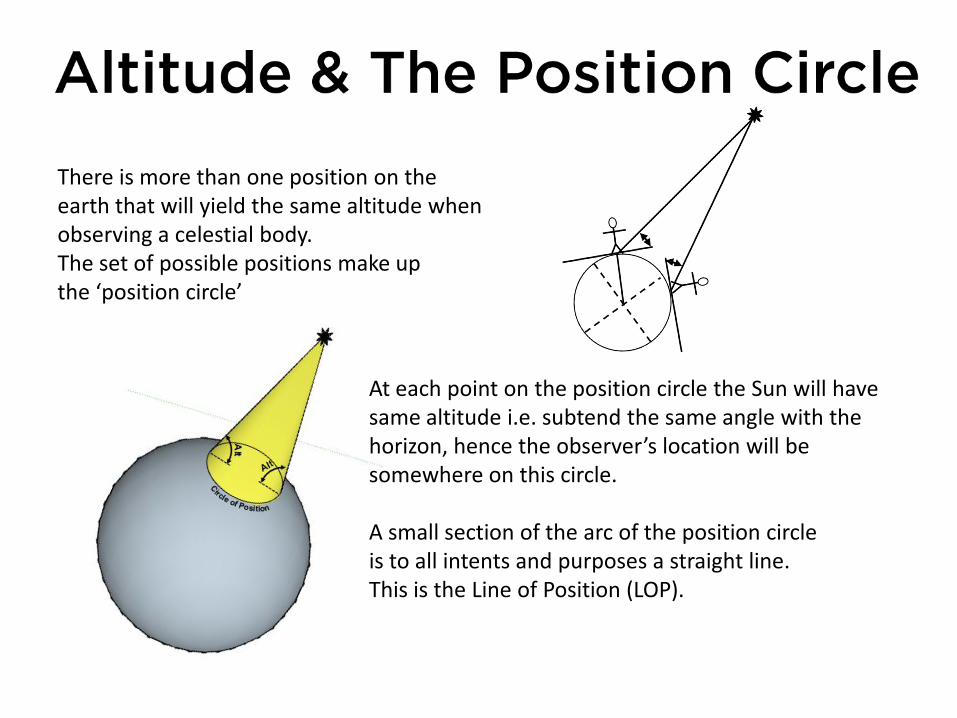
There is more than one position on the earth that will yield the same altitude when observing a celestial body. The set of possible positions make up the ‘position circle’
At each point on the position circle the Sun will have same altitude i.e. subtend the same angle with the horizon, hence the observer’s location will be somewhere on this circle. A small section of the arc of the position circle is to all intents and purposes a straight line. This is the Line of Position (LOP).

If the altitudes of three different stars are measured, three circles of position can be drawn. The three circles of position will intersect at one point. This is the Observer’s location i.e. the ‘Fix’.

To accurately ‘fix’ our position we use spherical geometry to ‘solve’ a triangle drawn on the surface of the earth. The triangle is unusual in that it is not flat (it is ‘non-Euclidian) . Each side of the triangle is formed by part of a great circle. The internal angles do not add up to 180° as in a normal flat Euclidian triangle. The sum of the angles can range from 180° to 360°.
Lat = Latitude Dec = Declination Alt = Altitude ZX = Zenith Angle LHA = Local Hour Angle Az = Azimuth Z = Observer’s Zenith P = Pole X = Star’s Geographic Position (point directly below star)
http://sketchup.google.com/3dwarehouse/details?mid=e1b4ec40d89720c5fb4ec9071d6a07a8

Two different formulae are used to determine the calculated altitude (Hc ) and the azimuth angle (Az). The azimuth is the bearing of the geographic position (GP) of the sun i.e. the bearing of the centre of the ‘position circle’ from the observer (or Assumed Position).
sinHc = cos DEC( ) cos LAT( ) cos(LHA)± sin DEC( ) sin LAT( )
sinAz =sin LHA( ) ´ cos DEC( )
cos Hc( )
Hc & Az can either be calculated or obtained using the ‘Sight Reduction Tables for Air Navigation’. Note that in the tables ‘Az’ is referred to as ‘Z’
For application and proofs and full explanation of different methods see “Celestial Navigation” powerpoint.

The positional ‘fix’ is determined by either: Location of an island, landmark or reef (seamark) Course is determined using the star compass, swell direction and wind direction Distance covered is determined by estimation of speed

Different star compasses were developed by different pacific seafaring groups The Satawal compass is a typical example. The setting/rising points of stars represented by pieces of coral/shells North is aligned as ‘up’. The compass was memorised by the navigator.
Two different star chart representations

Whilst stars rise at the same point on the horizon throughout the year they do not rise at the same time every night. Their rising/setting time advances by 4 minutes every day. Once a star is more than 20° above the horizon its setting/rising point becomes difficult to estimate and its usefulness as a navigation star diminishes. Hence a procession of stars that rise/set on a similar compass direction is memorized. This is known as a ‘star rope’ or ‘star path’ The Pacific navigator can identify over 150 stars. By sighting a single star the navigator can orientate himself and confirm his course.
The Pacific navigator used his canoe and its various parts as reference points for navigation. Clouds may obscure the horizon and the star path you want to follow. Other stars may however be visible. Once the canoe is on course it may be noted that a particular star is in line with one of the ropes supporting the mast (stays). The navigator would steer the canoe so that the star’s orientation with the stay remained constant. A special raised seat was set aside for the navigator from which he was able to view all parts of the canoe and surroundings.
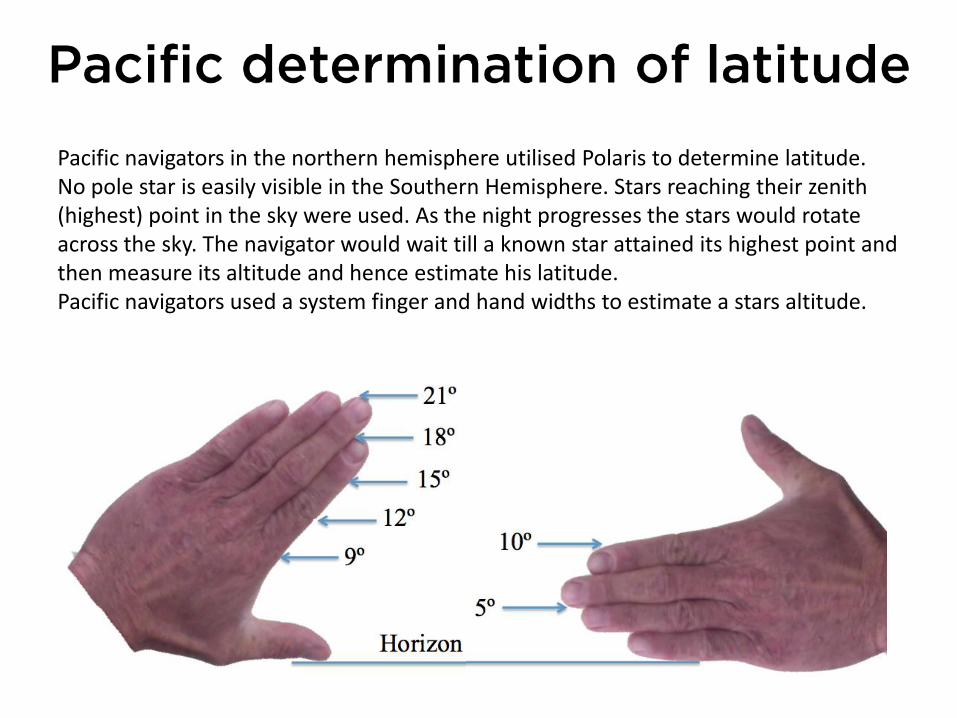
Pacific navigators in the northern hemisphere utilised Polaris to determine latitude. No pole star is easily visible in the Southern Hemisphere. Stars reaching their zenith (highest) point in the sky were used. As the night progresses the stars would rotate across the sky. The navigator would wait till a known star attained its highest point and then measure its altitude and hence estimate his latitude. Pacific navigators used a system finger and hand widths to estimate a stars altitude.

During the day the navigator has only one star to steer by, the Sun. As the sun soon rises high into the sky its usefulness as a steering star diminishes. The navigator can utilize wave and wind direction to maintain a constant course. Swells are waves formed by the wind acting on the sea over a long period of time. A swell will travel thousands of km losing very little of its size and energy. Swells are long, smooth waves whose period (time between successive wave) is much longer than ‘local’ wind driven waves. The swells travel in a near constant direction giving the navigator clues to help them maintain course.

In the open ocean several different swell patterns may be evident. A skilled navigator can distinguish up to 5 different swell patterns. Each swell pattern having a different direction, period and size. Of less reliability for navigation is wind direction. In tropical areas the trade winds will blow from a constant direction for days and weeks on end. The wind’s direction, in relation to the sailing vessel, can be used to maintain a steady course. The navigator will use every clue he can, stars, sun, swell and wind to maintain the required course to his next landfall.
Marshall Island Stick Wave Chart

The Pacific navigator judges his speed by observation. They take into account the rate the waka passes through the water (bubbles passing by), the waka’s wake and sound it creates by its passage. The experienced navigator’s estimation of speed can be extremely accurate taking a holistic view of all evidence.

There are no landmarks in the middle of the ocean. You have nothing with which to gauge your movement except the water flowing past. Sailing canoes were very efficient, especially when compared with European craft. However, unless the wind was behind a sailing waka it would have some degree of sideways drift or leeway. i.e. as well as moving it forwards the wind would also blow it sideways. The navigator had to be aware of this leeway, quantify it and make allowance for it in his course.

In mid ocean, as well as around coasts, there exist strong currents. These are driven by the moon (tidal currents), the wind (equatorial currents) and temperature & density variations (e.g. Gulf Stream). The navigator must be aware of these currents as they can move at over 3 knots, potentially carrying a waka many miles off its course in a day. On leaving an island the navigator will sail a constant course, lining up landmarks. After a period of time the island and landmarks are observed again. Any sideways movement of the island giving an indication of the current’s direction and strength.

In mid ocean however there are no islands with which to gauge current. The navigators must gains clues from the formation and shape of windblown waves. When the current opposes wind and waves the wave will crest and break with the broken water quickly dissipating and being ‘reabsorbed’ by wave. Wavelength may appear shorter with wave face steeper. When the current is in the same direction as wind and waves the wave will crest and break with the broken water running further ahead on the wave. Current running across the wave formation, however, is harder to identify.

The Pacific navigator holds the entire voyage within his mind. One method of abstraction is known as ‘Etak’. Each etak is a stage on the journey. The start point and finish points are visualized along with waypoints in between. A reference island is located to one side of the proposed course. The reference island, more often than not, lies over the horizon and can not be seen by the navigator. During the voyage the reference island, from the navigator’s perspective, will appear to move. At the start of the voyage the island may be ‘under’ the rising point of Vega and at the end of the voyage it will be under the rising point of Antares. The voyage is broken up into a series of Etak, each one corresponding with a setting/rising point of a star.

Not all Etak are abstractions, nor are they all of regular length. The first etak is the ‘etak of sighting’ (≈10nm) i.e. the distance that a leaving/target island can be seen from. The second is the ‘etak of birds’ (≈30nm) i.e the distance offshore the leaving/target island that land-based sea birds can be observed. The intermediate etaks between the leaving and target islands are abstractions and tend to be regularly spaced.

Etak of… A Sighting
B Birds
C ¼ voyage
D ½ voyage
E ¾ voyage F Birds
G Sighting
Vega
setting
Great Bear
setting
Polaris Great Bear
rising
Vega
rising
Reference
Island
Origin
Island Destination
Island
A B C
A
E F D G

Vega
setting
Great Bear
setting
Polaris
Great Bear
rising
Vega
rising
Origin
Island
Destination
Island
WIND

Nainoa Thompson, a Hawaiian researcher/navigator developed a system based on ‘houses’. Each rising/setting point of the navigational stars was known as a specific ‘house’. The ‘ideal’ course was visualised. As wind and currents caused the vessel to depart from this ideal course its actual course was described as e.g. ‘one house to the east’ therefore requiring a change of course of ‘one house to the west’ to regain the planned path.

The amount of data stored and assimilated by the Pacific navigator was prodigious. The present weather/conditions was also taken into account as well as forecasting weather to be encountered. The traditional navigator was constantly on ‘watch’. They were always aware of their course, speed and location. Their spatial awareness was incredible – their life, and the crew’s, depended on it!

The target islands can range from an atoll, less than a kilometer in width and a few metres above sea level, to islands such as New Zealand over a thousand km in length. The Pacific navigator used a range of means to ‘expand the target’
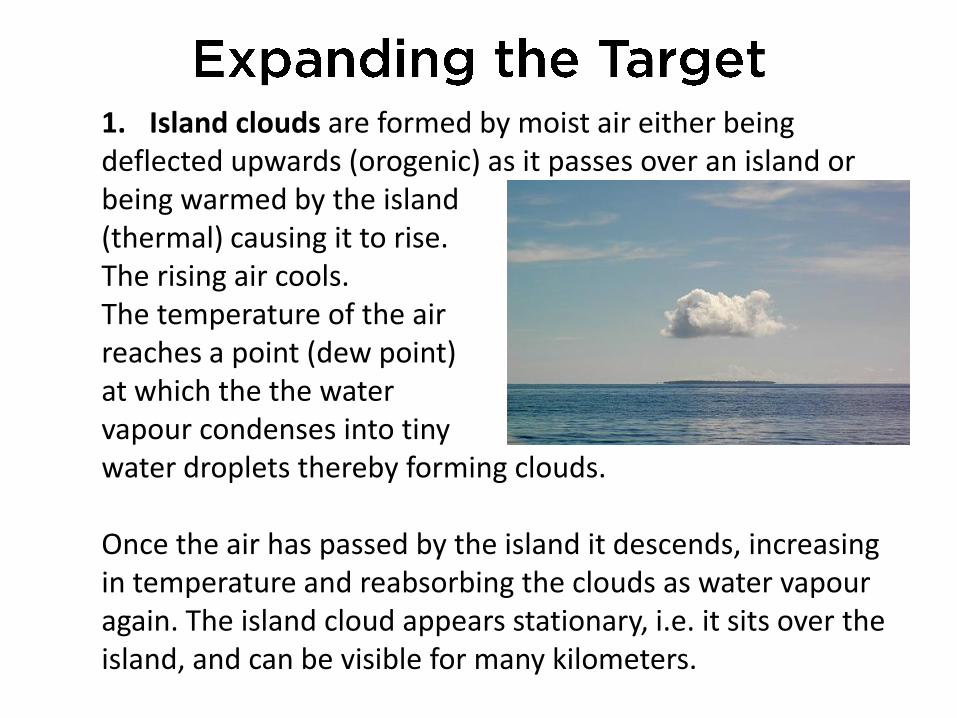
1. Island clouds are formed by moist air either being deflected upwards (orogenic) as it passes over an island or being warmed by the island (thermal) causing it to rise. The rising air cools. The temperature of the air reaches a point (dew point) at which the the water vapour condenses into tiny water droplets thereby forming clouds. Once the air has passed by the island it descends, increasing in temperature and reabsorbing the clouds as water vapour again. The island cloud appears stationary, i.e. it sits over the island, and can be visible for many kilometers.
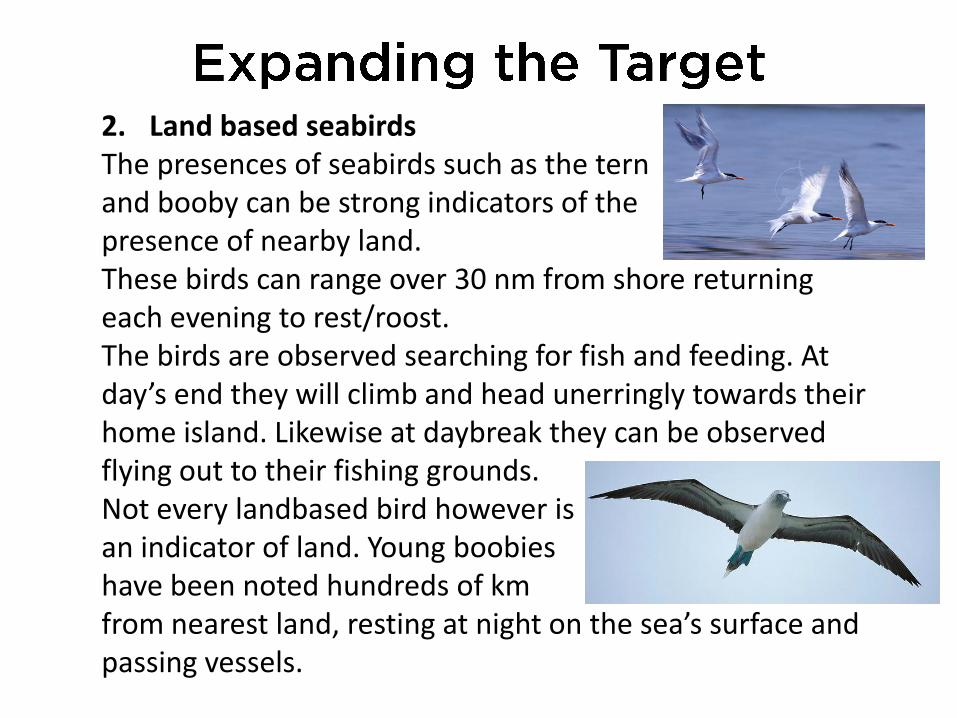
2. Land based seabirds The presences of seabirds such as the tern and booby can be strong indicators of the presence of nearby land. These birds can range over 30 nm from shore returning each evening to rest/roost. The birds are observed searching for fish and feeding. At day’s end they will climb and head unerringly towards their home island. Likewise at daybreak they can be observed flying out to their fishing grounds. Not every landbased bird however is an indicator of land. Young boobies have been noted hundreds of km from nearest land, resting at night on the sea’s surface and passing vessels.

3. Reefs and Shoals Reefs and shoals can be used as ‘signposts’ to a nearby island. The reef may extend over a significant area of sea thereby presenting a much larger target than the ‘target’ island. Once the reef has been located and identified the target island’s position can be determined. The presence of a reef of shoal is evident as shallower water appears lighter coloured compared surrounding to deep water. i.e. light blue/green vs deep blue.

4. Wave reflection Ocean swells are influenced by the presence of land and shallow water. A land ‘barrier’ will reflect a wave. The wave will have same period (time between successive waves) as its ‘parent’ but will have smaller displacement (height). The interaction/interference between the parent and reflected waves causes series of peaks or nodes (points A, B & C) to form that can be followed to land.

5. Wave diffraction The shallow water around and island or over a reef/shoal will cause wave diffraction (bending). The speed of a wave is dependent on the water depth. The shallower the water, the slower the wave. The disparity in speed causes the wave to bend in towards the island. Note that the wave’s period is unchanged. A skilled observer will note the ‘coming together’ of the two wave systems, each having the same period, forming regular wave peaks or nodes (points A, B & C). Following the nodes will lead to the island.

6. Cloud reflection The lower portion of lightly coloured clouds form a canvas for the reflection of the islands and lagoons lying beneath them. In this image the reflection of the blue/green lagoon is evident. A low lying island can be visible from approximately 10 nm. The cloud above it is visible from a significantly greater distance.

7. Sea life and debris Open ocean is surprisingly devoid of life. The deep blue tropical Pacific Ocean contains little organic matter and nutrients compared to the richer greener seas closer to land and nearer the poles. As land is neared bird and sea life sightings become more frequent along with seaborne detritus such as seaweed and plant life.

8. Island Chains/Screens By combining the different island/target expansion tools an archipelago or group of islands can form a significantly larger target. Once landfall is made and the island identified a course can be set to the intended destination. If a target island is missed due to storm being encountered a course can be set towards an island screen to enable one’s position to be verified.
Islands expanded by 30nm bird radius. Lewis 1994
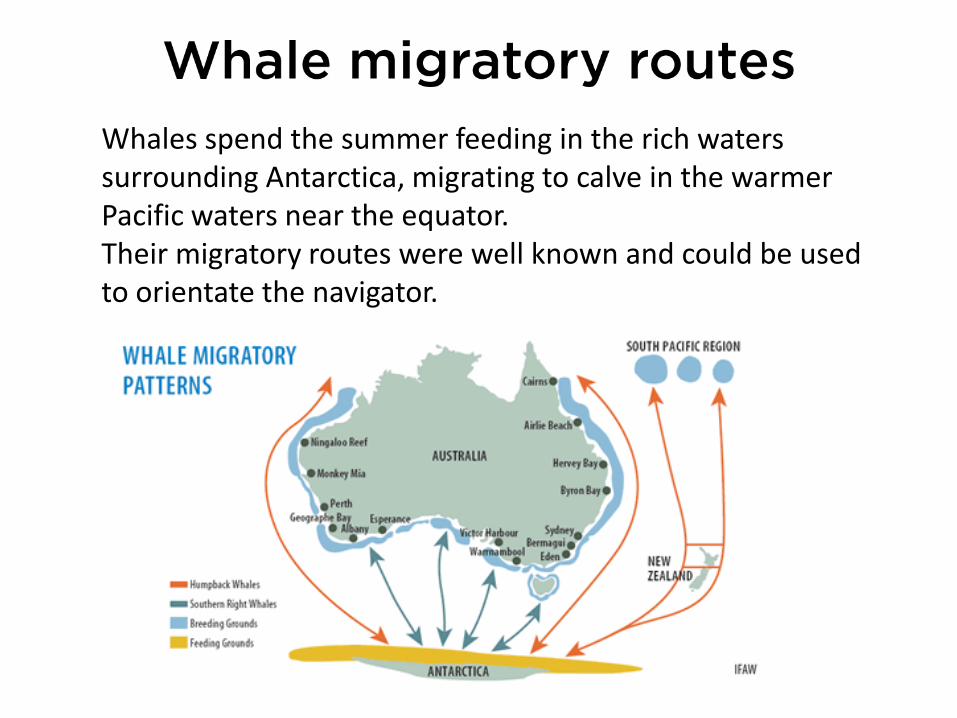
Whales spend the summer feeding in the rich waters surrounding Antarctica, migrating to calve in the warmer Pacific waters near the equator. Their migratory routes were well known and could be used to orientate the navigator.
During the expansion of Polynesia the navigators sailed the vast empty swathes of the Pacific Ocean discovering and peopling every island that was capable of supporting a population. They sailed, often against the prevailing trade winds, in outrigger and double hull (catamaran) waka whose performance amazed the early European explorers such as Cook. The distances covered in these voyages were enormous. E.g. 3200km Cook Island to NZ. They observed the direction of the annual migration of land birds such as the long tailed cuckoo surmising that land must lie somewhere ‘out there’ and then embarked on voyages to find this unknown land.

Western navigation is an abstract science in comparison to traditional Pacific navigation. A student of Western navigation can learn most of their navigational skills in the classroom using charts, parallel rules and dividers. Practical tuition, taking compass and sextant sights, can be completed in the ‘field’. In the ‘real world’ aboard a rolling and pitching ship in often inclement weather navigating by instruments is no easy task. The measurements that are taken must be exact – a small error can put your ‘fix’ many miles away from your actual position.
Islands expanded by 30nm bird radius. Lewis 1994
The Pacific navigator was apprenticed from a young age. Their learning could start as early as five years old. A master navigator studied for 25+ years before graduation. The navigator held an esteemed position, ranking above the village chief during a voyage. Classes would be held in the canoe house (a long thatched open sided building that housed the voyaging canoe). The rafters and ridge pole formed a grid onto which the night sky was visualised. Students were able to be able to locate and identify the principal navigation stars.

The student initially learnt the sailing directions to the islands in their immediate vicinity, memorising the stars beneath which each island lies; the reefs and ‘sea marks’ in their vicinity; the bird life unique to the target island; the currents and conditions likely to be encountered at different times of year. Learning of this information was aided using mnemonics such as coral star charts, wave charts, and story telling. Stories and legends embodied large amounts of information and were a key to the handing on of knowledge.

Stories could take the form of a fishing story. E.g. Chasing a parrot fish that fled from ‘reef-hole’ to ‘reef-hole’ on different islands, following different star paths to reach its destination. Kupe’s voyage of discovery of New Zealand was remembered using a legend retelling the story of the chase and vanquish of a rivals chief’s pet octopus that was scaring away fish and stealing their bait. The octopus was pursued and eventually outwitted and killed off the coast of New Zealand.
Students would learn how their canoes reacted to the different wave and swell patterns. The canoe would pitch (bow moving up and down) and roll (side to side) depending on its orientation to the waves. The twin hulled canoes of the Pacific reacted to the waves differently compared to the traditional western monohull. An experienced navigator would sense this movement and steer by it in the absence of star sights. Students would sail out beyond the reef into open ocean, jump overboard and lie in the water learning to sense and ‘read’ the movement of the sea.

Technology has had a profound effect on Western navigation. During the WW2 radio direction finding and hyperbolic navigation were perfected. These radio signal based methods were used in conjunction with the sextant and dead reckoning.

The USA’s need, during the Cold War, to be able to accurately fix the positions of their nuclear submarines and target nuclear warheads led to the development of the satellite based ‘Global Positioning System’. GPS can accurately fix your position on the globe, rain of shine, to within 20m. Since the advent of GPS the use of traditional western navigational methods has been in decline, to the point where the US Navy no longer teaches it to new officers.

Over time Pacific Navigation, due to technology and colonial pressure, has been in decline. However, thanks to the recent renaissance in Pacific navigation and voyaging, the skills are being relearnt and passed on to new generations of sailors and navigators. Navigators have completed many trans-ocean voyages using replica waka and applying traditional navigational methods. They have proved the seaworthiness of their craft, the accuracy of their navigational methods and have validated the anthropologists theories re the settlement of the Pacific.
Mathematics forms the basis of all navigation, whether it be the solution of trigonometric equations or a sense of spatial awareness. The Western Navigator was a master mariner capable of taking accurate measurements using technological devices from the unstable deck of a ship and applying lengthy mathematics to determine their ship’s position The Pacific Navigator was also a master mariner, capable of reading the natural signs available to him and accurately navigating and steering his vessel to a planned landfall.

Bibliography:
Western Celestial Navigation
Celestial Navigation; Tony Cunliffe
Simplified navigation by the sun; Bill Belcher
Simple Offshore Navigation; Alan Wallwork
American Practical Navigator; Bowditch
From sails to satellites; J.E.D. Williams
Munro’s Mathematics for deck officers
Guide to Celestial Navigation; Henning Umland
Astronomy Fundamentals; Jim Hollings
Longitude; BBC Dramatized Documentary

Bibliography:
Polynesian Navigation
An Ocean in mind, Will Kyselka
We, the navigators, The Ancient Art of Landfinding in the Pacific; David Lewis
East is a Big Bird: Navigation and Logic on Puluwat Atoll; Thomas Gladwin
Polynesian Navigation and the Discovery of New Zealand; Jeff Evan
Sailing in the wake of our ancestors; Ben Finney
Vaka Moana, Voyages of the ancestors. The discovery and settlement of the Pacific; KR Rowe
Te Reo Tatai; The Relationships between Maori Culture and Maori Mathematical Language;
Tony Trinnick
Pacific Navigation and Voyaging; Ben Finney
The Lore of the Whare-Wananga
Myths and Legends of the Polynesian People; Johannes C. Anderson
The Maori Canoe; Elsdon Best
Maori myth and legend; A.W. Reed
Migrations, myth and magic from the Gilbert Islands; Rosemary Grimble.
Against, across and down the wind: A case for the systematic exploration of the remote Pacific
Islands; Geoffrey Irwin – The Journal of the Polynesian Society
Wait for the west wind; Ben Finney - The Journal of the Polynesian Society
The Colonisation of the Pacific Plate; Chronological, navigational and social issues; Geoffrey Irwin – The
Journal of the Polynesian Society
Nga Waka O Nehera – The First Voyaging Canoes – Jeff Evans
The Last Navigator; Stephen Thomas
The Navigators – Pathfinders of the Pacific; Documentary; Sam Low