global optimization of continuous minmax problem · 2016-10-11 · min max problem in controlglobal...
TRANSCRIPT

Min Max problem in control Global optimization for Min max problems Benchmark Conclusion
Global Optimization of continuous MinMaxproblem
Dominique Monnet, Jordan Ninin, Benoıt ClementLAB-STICC, UMR 6285 / ENSTA-Bretagne
1 / 23

Min Max problem in control Global optimization for Min max problems Benchmark Conclusion
Min Max problems
Min Max problems appear in:
Robust control
Game theory
Risk management
Every problem involving uncertainty
2 / 23

Min Max problem in control Global optimization for Min max problems Benchmark Conclusion
Plan
1 Min Max problem in control
2 Global optimization for Min max problems
3 Benchmark
4 Conclusion
3 / 23

Min Max problem in control Global optimization for Min max problems Benchmark Conclusion
What is control?
Dynamic system (Robot, Missile, Dam, Washingmachine...).
Actuators (Motor, Steering wheel, Flap, ...).
Sensors (INS, Sonar, Temperature/Pressure sensor, ...).
Reference to follow.
Controller to close the loop.
K
G
u yre+
−
4 / 23

Min Max problem in control Global optimization for Min max problems Benchmark Conclusion
What is control?
Dynamic system (Robot, Missile, Dam, Washingmachine...).
Actuators (Motor, Steering wheel, Flap, ...).
Sensors (INS, Sonar, Temperature/Pressure sensor, ...).
Reference to follow.
Controller to close the loop.
K
Gu
yre+
−
4 / 23

Min Max problem in control Global optimization for Min max problems Benchmark Conclusion
What is control?
Dynamic system (Robot, Missile, Dam, Washingmachine...).
Actuators (Motor, Steering wheel, Flap, ...).
Sensors (INS, Sonar, Temperature/Pressure sensor, ...).
Reference to follow.
Controller to close the loop.
K
Gu y
re+
−
4 / 23

Min Max problem in control Global optimization for Min max problems Benchmark Conclusion
What is control?
Dynamic system (Robot, Missile, Dam, Washingmachine...).
Actuators (Motor, Steering wheel, Flap, ...).
Sensors (INS, Sonar, Temperature/Pressure sensor, ...).
Reference to follow.
Controller to close the loop.
K
Gu yr
e+
−
4 / 23

Min Max problem in control Global optimization for Min max problems Benchmark Conclusion
What is control?
Dynamic system (Robot, Missile, Dam, Washingmachine...).
Actuators (Motor, Steering wheel, Flap, ...).
Sensors (INS, Sonar, Temperature/Pressure sensor, ...).
Reference to follow.
Controller to close the loop.
K
Gu yr
e+
−
4 / 23

Min Max problem in control Global optimization for Min max problems Benchmark Conclusion
What is control?
Dynamic system (Robot, Missile, Dam, Washingmachine...).
Actuators (Motor, Steering wheel, Flap, ...).
Sensors (INS, Sonar, Temperature/Pressure sensor, ...).
Reference to follow.
Controller to close the loop.
K Gu yr
e+
−
4 / 23

Min Max problem in control Global optimization for Min max problems Benchmark Conclusion
Frequency constraint
10 -3 10 -2 10 -1 10 0 10 1
Pulsation (rad/s)
-100
-80
-60
-40
-20
0
20
40
Magnitude
(dB)
Bode Diagrams
WTr!e
Frequency constraint on e(iω): we want | e(iω)r(iω) | = |Tr→e(K, iω)|to be small
∀ω ≥ 0, |Tr→e(K, iω)| ≤ |W (iω)| ⇐⇒ supω
(|Tr→e(K, iω)W−1(iω)|) ≤ 1
5 / 23

Min Max problem in control Global optimization for Min max problems Benchmark Conclusion
Min max problem formulation
Stability constraint:
The closed loop system is stable ⇐⇒ R(K) ≤ 0 (Routhcriterion).
R(K) ≤ 0 is a non-convex rational system.
Problem formulationminK
supω|Tr→e(K, iω)W−1(iω)|,
s.t. R(K) ≤ 0
We want:
an enclosure of the minimum.
reliable computation.
→ Interval Based Branch and Bound Algorithm6 / 23

Min Max problem in control Global optimization for Min max problems Benchmark Conclusion
Plan
1 Min Max problem in control
2 Global optimization for Min max problems
3 Benchmark
4 Conclusion
7 / 23

Min Max problem in control Global optimization for Min max problems Benchmark Conclusion
Min max problem formulation
We search x∗ ∈ X such that supy∈Y
f(x∗, y) is minimal.
Constrained Min max problem
minx∈X
supy∈Y
f(x, y),
s.t. Cx(x) ≤ 0
Cxy(x, y) ≤ 0
X and Y are bounded.
f , Cx and Cxy can be evaluated with interval computation.
8 / 23

Min Max problem in control Global optimization for Min max problems Benchmark Conclusion
Main Branch and bound algorithm: minimization
Interval Based Branch and Bound Algorithm
Init: push X in L1 Choose a box x from L.
2 Contract x w.r.t Cx(x) ≤ 0 using CSP techniques.
3 Compute [lbx, ubx] an enclosure of supy∈Y
f(x, y).
4 Try to find a good feasible solution in x.
5 Update best current solution.
6 Bisect x into x1 and x2, push x1 and x2 in L.
Stop criterion: width([minx∈L
lbx, minx∈L,C(x)≤0
ubx]) ≤ ε.
9 / 23
Min Max problem in control Global optimization for Min max problems Benchmark Conclusion
Main Branch and bound
x
Cx = 0
10 / 23

Min Max problem in control Global optimization for Min max problems Benchmark Conclusion
Main Branch and bound
x
Cx = 0
10 / 23

Min Max problem in control Global optimization for Min max problems Benchmark Conclusion
Main Branch and bound
x
Cx = 0
10 / 23

Min Max problem in control Global optimization for Min max problems Benchmark Conclusion
Main Branch and bound
x
Cx = 0
10 / 23

Min Max problem in control Global optimization for Min max problems Benchmark Conclusion
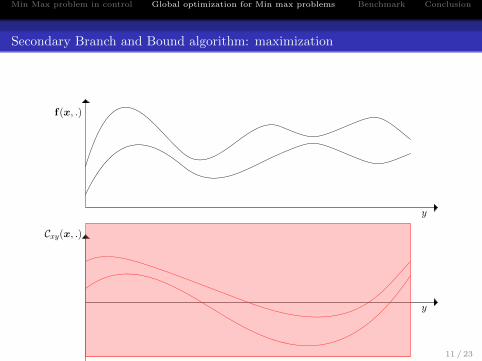
Secondary Branch and Bound algorithm: maximization
f(x, .)
y
Cxy(x, .)
y
ubx
lbx
ubx
lbx
ubx
lbx
ubx
lbx
ubx
lbxlbx
∪
[yx,max]
11 / 23

Min Max problem in control Global optimization for Min max problems Benchmark Conclusion
Secondary Branch and Bound algorithm: maximization
f(x, .)
y
Cxy(x, .)
y
ubx
lbx
ubx
lbx
ubx
lbx
ubx
lbx
ubx
lbxlbx
∪
[yx,max]
11 / 23
Min Max problem in control Global optimization for Min max problems Benchmark Conclusion
Secondary Branch and Bound algorithm: maximization
f(x, .)
y
Cxy(x, .)
y
ubx
lbx
ubx
lbx
ubx
lbx
ubx
lbx
ubx
lbxlbx
∪
[yx,max]
11 / 23

Min Max problem in control Global optimization for Min max problems Benchmark Conclusion
Secondary Branch and Bound algorithm: maximization
f(x, .)
y
Cxy(x, .)
y
ubx
lbx
ubx
lbx
ubx
lbx
ubx
lbx
ubx
lbxlbx
∪
[yx,max]
11 / 23

Min Max problem in control Global optimization for Min max problems Benchmark Conclusion
Secondary Branch and Bound algorithm: maximization
f(x, .)
y
Cxy(x, .)
y
ubx
lbx
ubx
lbx
ubx
lbx
ubx
lbx
ubx
lbxlbx
∪
[yx,max]
11 / 23

Min Max problem in control Global optimization for Min max problems Benchmark Conclusion
Secondary Branch and Bound algorithm: maximization
f(x, .)
y
Cxy(x, .)
y
ubx
lbx
ubx
lbx
ubx
lbx
ubx
lbx
ubx
lbxlbx
∪
[yx,max]
11 / 23

Min Max problem in control Global optimization for Min max problems Benchmark Conclusion
Secondary Branch and Bound algorithm: maximization
f(x, .)
y
Cxy(x, .)
y
ubx
lbx
ubx
lbx
ubx
lbx
ubx
lbx
ubx
lbxlbx
∪
[yx,max]
11 / 23

Min Max problem in control Global optimization for Min max problems Benchmark Conclusion
Secondary Branch and Bound algorithm: maximization
f(x, .)
y
Cxy(x, .)
y
ubx
lbx
ubx
lbx
ubx
lbx
ubx
lbx
ubx
lbxlbx
∪
[yx,max]
11 / 23

Min Max problem in control Global optimization for Min max problems Benchmark Conclusion
Secondary Branch and Bound algorithm: maximization
f(x, .)
y
Cxy(x, .)
y
ubx
lbx
ubx
lbx
ubx
lbx
ubx
lbx
ubx
lbxlbx
∪
[yx,max]
11 / 23

Min Max problem in control Global optimization for Min max problems Benchmark Conclusion
Secondary Branch and Bound algorithm: maximization
f(x, .)
y
Cxy(x, .)
y
ubx
lbx
ubx
lbx
ubx
lbx
ubx
lbx
ubx
lbxlbx
∪
[yx,max]
11 / 23

Min Max problem in control Global optimization for Min max problems Benchmark Conclusion
Secondary Branch and Bound algorithm: maximization
f(x, .)
y
Cxy(x, .)
y
ubx
lbx
ubx
lbx
ubx
lbx
ubx
lbx
ubx
lbx
lbx
∪
[yx,max]
11 / 23

Min Max problem in control Global optimization for Min max problems Benchmark Conclusion
Secondary Branch and Bound algorithm: maximization
f(x, .)
y
Cxy(x, .)
y
ubx
lbx
ubx
lbx
ubx
lbx
ubx
lbx
ubx
lbx
lbx
∪
[yx,max]
11 / 23

Min Max problem in control Global optimization for Min max problems Benchmark Conclusion
Secondary Branch and Bound algorithm: maximization
f(x, .)
y
Cxy(x, .)
y
ubx
lbx
ubx
lbx
ubx
lbx
ubx
lbx
ubx
lbx
lbx
∪
[yx,max]
11 / 23

Min Max problem in control Global optimization for Min max problems Benchmark Conclusion
Secondary Branch and Bound algorithm: maximization
f(x, .)
y
Cxy(x, .)
y
ubx
lbx
ubx
lbx
ubx
lbx
ubx
lbx
ubx
lbx
lbx
∪
[yx,max]
11 / 23

Min Max problem in control Global optimization for Min max problems Benchmark Conclusion
Secondary Branch and Bound algorithm: maximization
f(x, .)
y
Cxy(x, .)
y
ubx
lbx
ubx
lbx
ubx
lbx
ubx
lbx
ubx
lbx
lbx
∪
[yx,max]
11 / 23

Min Max problem in control Global optimization for Min max problems Benchmark Conclusion
Inclusion properties
Let be x ⊆ X and y ⊆ Y, we denote
fmax(x) = {supyf(x, y), x ∈ x}
yx,max = {y ∈ Y|∃x ∈ x, y maximizes f(x, y)}
Let be x1 ⊆ x.
Proposition
fmax(x1) ⊆ fmax(x)
yx1,max ⊆ yx,max
Cx(x) ≤ 0 =⇒ Cx(x1) ≤ 0
Cxy(x,y) ≤ 0 =⇒ Cxy(x1,y) ≤ 0
12 / 23

Min Max problem in control Global optimization for Min max problems Benchmark Conclusion
Main Branch and bound
x
Cx = 0Cx = 0
[fmax(x)], [yx,max]
x1 x2
[fmax(x)], [yx,max] [fmax(x)], [yx,max]
13 / 23
Min Max problem in control Global optimization for Min max problems Benchmark Conclusion
Main Branch and bound
x
Cx = 0Cx = 0
[fmax(x)], [yx,max]
x1 x2
[fmax(x)], [yx,max] [fmax(x)], [yx,max]
13 / 23

Min Max problem in control Global optimization for Min max problems Benchmark Conclusion
Main Branch and bound
x
Cx = 0Cx = 0
[fmax(x)], [yx,max]
x1 x2
[fmax(x)], [yx,max] [fmax(x)], [yx,max]
13 / 23

Min Max problem in control Global optimization for Min max problems Benchmark Conclusion
Main Branch and bound
x
Cx = 0Cx = 0
[fmax(x)], [yx,max]
x1 x2
[fmax(x)], [yx,max] [fmax(x)], [yx,max]
13 / 23
Min Max problem in control Global optimization for Min max problems Benchmark Conclusion
Main Branch and bound
x
Cx = 0Cx = 0
[fmax(x)], [yx,max]
x1 x2
[fmax(x)], [yx,max] [fmax(x)], [yx,max]
13 / 23

Min Max problem in control Global optimization for Min max problems Benchmark Conclusion
Main Branch and bound
x
Cx = 0Cx = 0
[fmax(x)], [yx,max]
x1 x2
[fmax(x)], [yx,max] [fmax(x)], [yx,max]
13 / 23

Min Max problem in control Global optimization for Min max problems Benchmark Conclusion
Main Branch and bound with Inclusion properties
f(x, .)
y
Cxy(x, .)
y
f(x1, .)
f(x1, .)
y
Cxy(x1, .)
y
ubx
lbx
ubx
lbx
ubx
lbxlbx
∪
[yx1,max]
14 / 23

Min Max problem in control Global optimization for Min max problems Benchmark Conclusion
Main Branch and bound with Inclusion properties
f(x, .)
y
Cxy(x, .)
y
f(x1, .)
f(x1, .)
y
Cxy(x1, .)
y
ubx
lbx
ubx
lbx
ubx
lbxlbx
∪
[yx1,max]
14 / 23

Min Max problem in control Global optimization for Min max problems Benchmark Conclusion
Main Branch and bound with Inclusion properties
f(x, .)
y
Cxy(x, .)
y
f(x1, .)
f(x1, .)
y
Cxy(x1, .)
y
ubx
lbx
ubx
lbx
ubx
lbxlbx
∪
[yx1,max]
14 / 23

Min Max problem in control Global optimization for Min max problems Benchmark Conclusion
Main Branch and bound with Inclusion properties
f(x, .)
y
Cxy(x, .)
y
f(x1, .)
f(x1, .)
y
Cxy(x1, .)
y
ubx
lbx
ubx
lbx
ubx
lbxlbx
∪
[yx1,max]
14 / 23

Min Max problem in control Global optimization for Min max problems Benchmark Conclusion
Main Branch and bound with Inclusion properties
f(x, .)
y
Cxy(x, .)
y
f(x1, .)
f(x1, .)
y
Cxy(x1, .)
y
ubx
lbx
ubx
lbx
ubx
lbxlbx
∪
[yx1,max]
14 / 23

Min Max problem in control Global optimization for Min max problems Benchmark Conclusion
Main Branch and bound with Inclusion properties
f(x, .)
y
Cxy(x, .)
y
f(x1, .)
f(x1, .)
y
Cxy(x1, .)
y
ubx
lbx
ubx
lbx
ubx
lbxlbx
∪
[yx1,max]
14 / 23

Min Max problem in control Global optimization for Min max problems Benchmark Conclusion
Main Branch and bound with Inclusion properties
f(x, .)
y
Cxy(x, .)
y
f(x1, .)
f(x1, .)
y
Cxy(x1, .)
y
ubx
lbx
ubx
lbx
ubx
lbxlbx
∪
[yx1,max]
14 / 23

Min Max problem in control Global optimization for Min max problems Benchmark Conclusion
Main Branch and bound with Inclusion properties
f(x, .)
y
Cxy(x, .)
y
f(x1, .)
f(x1, .)
y
Cxy(x1, .)
y
ubx
lbx
ubx
lbx
ubx
lbxlbx
∪
[yx1,max]
14 / 23

Min Max problem in control Global optimization for Min max problems Benchmark Conclusion
Main Branch and bound with Inclusion properties
f(x, .)
y
Cxy(x, .)
y
f(x1, .)
f(x1, .)
y
Cxy(x1, .)
y
ubx
lbx
ubx
lbx
ubx
lbx
lbx
∪
[yx1,max]
14 / 23

Min Max problem in control Global optimization for Min max problems Benchmark Conclusion
Main Branch and bound with Inclusion properties
f(x, .)
y
Cxy(x, .)
y
f(x1, .)
f(x1, .)
y
Cxy(x1, .)
y
ubx
lbx
ubx
lbx
ubx
lbx
lbx
∪
[yx1,max]
14 / 23

Min Max problem in control Global optimization for Min max problems Benchmark Conclusion
Main Branch and bound with Inclusion properties
f(x, .)
y
Cxy(x, .)
y
f(x1, .)
f(x1, .)
y
Cxy(x1, .)
y
ubx
lbx
ubx
lbx
ubx
lbx
lbx
∪
[yx1,max]
14 / 23

Min Max problem in control Global optimization for Min max problems Benchmark Conclusion
Main Branch and bound with Inclusion properties
f(x, .)
y
Cxy(x, .)
y
f(x1, .)
f(x1, .)
y
Cxy(x1, .)
y
ubx
lbx
ubx
lbx
ubx
lbx
lbx
∪
[yx1,max]
14 / 23

Min Max problem in control Global optimization for Min max problems Benchmark Conclusion
Main Branch and bound with Inclusion properties
f(x, .)
y
Cxy(x, .)
y
f(x1, .)
f(x1, .)
y
Cxy(x1, .)
y
ubx
lbx
ubx
lbx
ubx
lbx
lbx
∪
[yx1,max]
14 / 23

Min Max problem in control Global optimization for Min max problems Benchmark Conclusion
Main Branch and bound
x
Cx = 0Cx = 0
x1
[fmax(x)], [yx,max]
x2
[fmax(x)], [yx,max] [fmax(x)], [yx,max]
[fmax(x1)], [yx1,max]
x11 x12
[fmax(x1)], [yx1,max] [fmax(x1)], [yx1,max]
15 / 23

Min Max problem in control Global optimization for Min max problems Benchmark Conclusion
Main Branch and bound
x
Cx = 0Cx = 0
x1
[fmax(x)], [yx,max]
x2
[fmax(x)], [yx,max] [fmax(x)], [yx,max]
[fmax(x1)], [yx1,max]
x11 x12
[fmax(x1)], [yx1,max] [fmax(x1)], [yx1,max]
15 / 23

Min Max problem in control Global optimization for Min max problems Benchmark Conclusion
Main Branch and bound
x
Cx = 0Cx = 0
x1
[fmax(x)], [yx,max]
x2
[fmax(x)], [yx,max] [fmax(x)], [yx,max]
[fmax(x1)], [yx1,max]
x11 x12
[fmax(x1)], [yx1,max] [fmax(x1)], [yx1,max]
15 / 23

Min Max problem in control Global optimization for Min max problems Benchmark Conclusion
Plan
1 Min Max problem in control
2 Global optimization for Min max problems
3 Benchmark
4 Conclusion
16 / 23

Min Max problem in control Global optimization for Min max problems Benchmark Conclusion
Examples
Problems Obj. func. x dim y dim Cx CxyArticle example[1] other 2 2 no noArticle example[3] polynomial 1 1 no yesArticle example[3] trigonometric 1 1 no yes
Control rational 3 1 yes noControl rational 4 1 yes noControl rational 2 1 yes noControl rational 4 1 yes noControl rational 4 1 yes no
Risk Management[2] polynomial 2 2 no noRisk Management[2] polynomial 2 2 no noRisk Management[2] polynomial 2 2 no noRisk Management[2] polynomial 2 3 no noRisk Management[2] polynomial 3 3 no no
17 / 23

Min Max problem in control Global optimization for Min max problems Benchmark Conclusion
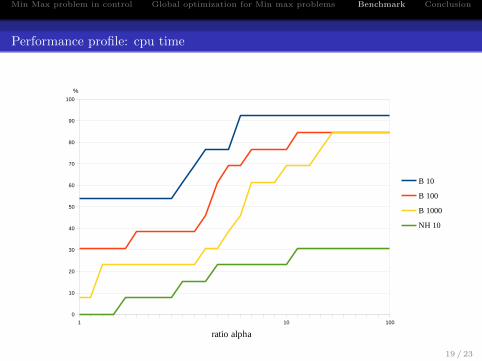
Algorithm features
Algorithm is tested with four features:
10 bisections are performed in the maximization problem,inclusion properties used → B 10.
100 bisections are performed in the maximization problem,inclusion properties used → B 100.
1000 bisections are performed in the maximizationproblem, inclusion properties used → B 1000.
10 bisections are performed in the maximization problem,inheritance properties not used → NH 10.
18 / 23
Min Max problem in control Global optimization for Min max problems Benchmark Conclusion
Performance profile: cpu time
19 / 23

Min Max problem in control Global optimization for Min max problems Benchmark Conclusion
Performance profile: number of function evaluation
20 / 23

Min Max problem in control Global optimization for Min max problems Benchmark Conclusion
Plan
1 Min Max problem in control
2 Global optimization for Min max problems
3 Benchmark
4 Conclusion
21 / 23

Min Max problem in control Global optimization for Min max problems Benchmark Conclusion
Conclusion
Solver for non-convex problems (non-convex objectivefunction and non-convex constraints).
Taking advantage of Inclusion properties save computationtime.
Finding the best number of bisection is difficult.
Next steps:
Test the algorithm on more examples.
Improve convergence time (monotonicity tests, affinearithmetic, ...).
How to find the number of bisection?
22 / 23

Min Max problem in control Global optimization for Min max problems Benchmark Conclusion
E. Carrizosa and F. Messine. A branch and bound methodfor global robust optimization. Proc. 12th globaloptimization workshop (Malaga, Spain, September 2014),2014.
B. Rustem and M. Howe. Algorithms for Worst-CaseDesign and Applications to Risk Management. PrincetonUniversity Press, 2002.
M. Sainz, P. Herrero, J. Armengol, and J. Vehı. Continuousminimax optimization using modal intervals. Journal ofMathematical Analysis and Applications, 339(1):18–30,2008.
23 / 23