geomorphic and structural evolution of relay ramps …
TRANSCRIPT

GEOMORPHIC AND STRUCTURAL EVOLUTION OF RELAY RAMPS DURING
NORMAL FAULT INTERACTION AND LINKAGE
AN ABSTRACT SUBMITTED ON THE THIRD DAY OF AUGUST, 2016 TO THE
DEPARTMENT OF EARTH AND ENVIRONMENTAL SCIENCES IN PARTIAL
FULFILLMENT OF THE REQUIREMENTS OF THE SCHOOL OF SCIENCE AND
ENGINEERING OF TULANE UNIVERSITY FOR THE DEGREE OF
DOCTOR OF PHILOSOPHY
BY
Michael C. Hopkins
APPROVED:
Nancye H. Dawers (Ph.D. Director)
_____________________________
Nicole M. Gasparini, Ph.D.
Brent M. Goehring, Ph.D.
_____________________________
Sean Bemis, Ph.D. (External Member)

ABSTRACT
Geomorphic features such as fluvial channels and shorelines can act as tape recorders of
accumulated tectonic deformation. Because these features can survive in a landscape for
up to105 years, the deformation represents tectonic activity over timescales longer than
earthquake cycles but shorter than geological timescales. Deformed landscape features
can be used to understand the impact of changing tectonic rates on landscape evolution
(given information on the tectonic processes involved). Conversely, we can take
advantage of how a landscape is expected to evolve and utilize those deviations to
explore details of tectonic processes that do not manifest over short timescales (i.e. single
earthquakes). Fault slip rate is expected to increase within the overlapping region of two
en echelon normal faults, but how increasing slip rate affects the landscape is poorly
understood (as discussed in Chapter 1). Additionally, details of this tectonic process that
occur over geomorphic timescales are not clearly understood. Chapter 2 of this
dissertation explores the impact of fault slip rate increase on fluvial channels during
normal fault interaction and linkage. Results of this work show that the landscape
responds by increasing channel slope and decreasing channel width before fault segments
link. Channel width only shows sustained decreases when a threshold channel slope of
about 0.05 is exceeded. In Chapter 3 vertically deformed lacustrine shorelines are
mapped along linked faults through the former overlap zones. These results show that
despite the presence of linking structures between faults, portions of the former
overlapping tips remain active post-linkage for 104 years. Chapter 4 investigates the
effect of fault length, spacing, and overlap on the area of relay ramps that drains parallel
to fault strike. Twenty-seven sites are examined and results show that for fault lengths
below 15 km most of the relay ramp area drains parallel to fault strike, whereas fault
lengths >15 km no particular drainage geometry is favored. Data on the overlap/spacing
ratio are biased to <2 for faults above ~15 km length. This bias is an inherent
characteristic because faults that define low overlap/spacing ratio relays do not link
rapidly and are, therefore, preserved within the landscape along large mature fault
systems. The results of this dissertation show that, while faults are mechanically
interacting, relay ramps are dynamic features that have significant impacts on landscape
evolution. Following complete linkage between segments, the relays do not behave as
passive structures and can actively deform over significant (>104 years) timescales.
Finally, the structural geometry of relay ramps impacts long-term morphodynamics and
channel network topology, which directly influences basin sedimentary architecture in
extensional basins.

GEOMORPHIC AND STRUCTURAL EVOLUTION OF RELAY RAMPS DURING
NORMAL FAULT INTERACTION AND LINKAGE
A DISSERTATION SUBMITTED ON THE THIRD DAY OF AUGUST, 2016 TO THE
DEPARTMENT OF EARTH AND ENVIRONMENTAL SCIENCES IN PARTIAL
FULFILLMENT OF THE REQUIREMENTS OF THE SCHOOL OF SCIENCE AND
ENGINEERING OF TULANE UNIVERSITY FOR THE DEGREE OF
DOCTOR OF PHILOSOPHY
BY
Michael C. Hopkins
APPROVED:
Nancye H. Dawers, Ph.D. (Director)
_____________________________
Nicole M. Gasparini, Ph.D.
Brent M. Goehring, Ph.D.
_____________________________
Sean Bemis, Ph.D. (External Member)

© Copyright by Michael C. Hopkins, 2016
All Rights Reserved

ii
ACKNOWLEDGMENTS
I would like to first acknowledge my adviser Nancye Dawers. I thank her for
supervising my dissertation research and for always being supportive during my Ph.D. I
thank my dissertation committee, Nicole Gasparini, Brent Goehring, and Sean Bemis for
their thoughtful comments and feedback. Reviewers Alexander Densmore, Alexander
Whittaker, Juliet Crider, Andrew Meigs, and one anonymous reviewer are thanked for
their comments, suggestions and feedback on the submitted manuscripts. Stacy Davies of
Roaring Springs Ranch, Frenchglen, OR, is thanked for giving access to ranch property to
make field observations for the work presented in Chapter 3.
Glenn Fisher, Heather Hoey, Jordan Adams and Matthew Dixon are thanked for
their assistance with field work and technical advice. I also want to thank all of the
friends I have made within the Department of Earth & Environmental Sciences at Tulane.
I could not have finished this work without them. Funding for this work was provided by
the American Chemical Society – Petroleum Research Fund (PRF-50833-ND8).
Summer support during part of this work was also provided by Schlumberger.
This dissertation is dedicated to my parents, Trudy A. Landry and Michael T.
Hopkins, for their unwavering support of my educational pursuits.

iii
TABLE OF CONTENTS
ACKNOWLEDGEMENTS……………………………………………………………….ii
LIST OF TABLES.....…………………………………………………………………….iv
LIST OF FIGURES……………………………………………………………………….v
CHAPTER
1. INTRODUCTION………………………………………………………………...1
2. CHANGES IN BEDROCK CHANNEL MORPHOLOGY DRIVEN BY
DISPLACEMENT RATE INCREASE DURING NORMAL FAULT
INTERACTION AND LINKAGE…..……………………………………………………9
3. VERTICAL DEFORMATION OF LACUSTRINE SHORELINES
ALONG BREACHED RELAY RAMPS, CATLOW VALLEY FAULT,
SOUTHEASTERN OREGON, USA………………………….…………………….......47
4. THE ROLE OF FAULT SCALE, SPACING AND OVERLAP IN
CONTROLLING RELAY RAMP CATCHMENT GEOMETRY……………………...80
Appendix
A. HEC-RAS MODELING……………………………………………................111
B. BASIN & RANGE SITE MAPS…....………………………………................117
BIBLIOGRAPHY………………………………………………………………………123
iv
LIST OF TABLES
4.1 Measurements and errors of fault length, overlap, spacing, ramp catchment area
and relay ramp area for study sites
A.1 HEC-RAS model parameters
v
LISIT OF FIGURES
1.1 Schematic block diagram of three faults illustrating the relay ramps, a schematic
map view of the Coulomb stress field following a slip event on a single fault and
displacement profiles of three faults illustrating their displacement patterns during fault
interaction
2.1 Schematic relay ramp diagram showing relay catchment and associated faults
2.2 Displacement profiles for two interacting normal faults
2.3 Study sites location map
2.4 Field photographs of fluvial channels
2.5 Unlinked and partially breached ramp 1 fault cut-off plots
2.6 Partially breached ramp 2 and fully breached ramp fault cut-off plots
2.7 Unlinked faults channel data
2.8 Partially breached ramp 1 and 2 channel data
2.9 Fully breached ramp channel data
2.10 Schmidt hammer data for channel knickpoints
2.11 Cartoon diagram illustrating fault displacement rate increase and accompanying
channel responses
3.1 Schematic block diagram of a linked pair of faults and the former relay ramp
3.2 Location map of Catlow Valley fault within the western Basin & Range
3.3 Locations of three breached relay ramps along Catlow Valley fault
3.4 Google Earth and field photograph of shorelines along the Catlow Valley
escarpment

vi
3.5 Block diagram illustrating shoreline terminology and maps illustrating how
shorelines were mapped
3.6 Shoreline map and elevation plots of shorelines along breached relay ramp ‘A’
3.7 Shoreline map and elevation plots of shorelines within ramp ‘A’
3.8 Shoreline map and elevation plots of shorelines along breached relay ramp ‘B’
3.9 Shoreline map and elevation plots of shorelines along breached relay ramp ‘C’
3.10 Google Earth imagery showing potential surface ruptures along Catlow Valley
fault and small faults within the upper portion of ramp ‘A’
3.11 Schematic line and block diagrams illustrating where deformation occurs on relay
breaching and adjacent structures following fault linkage
4.1 Block diagram illustrating relay ramp-parallel fluvial channels and ramp-
transverse channels
4.2 Study sites location map
4.3 Schematic block diagram and orthophoto of a relay ramp and associated
terminology
4.4 Orthophoto of normal fault tip mapped via GPS and remote sensing
4.5 Histograms of outboard fault length, spacing and overlap versus the number of
sites
4.6 Fault spacing versus overlap plot of this study and global dataset
4.7 Plot of outboard fault length versus down-ramp drained area (AFP) divided by
relay ramp area (AR)
4.8 Plot of outboard fault length versus fault overlap divided by fault spacing

vii
4.9 Schematic maps of scenarios by which relay fluvial systems may evolve as, or
transition, to a fault-transverse geometry
4.10 Google Earth images of scenarios depicted in Fig. 4.9
B1 Volcanic Tableland faults site maps
B2 Midway Hills faults site maps
B3 Palisade Mesa, Pearce and Buffalo Creek site maps
B4 Big Gulch, Blue Dome and Star Valley site maps
B5 Faults east of Abert Rim and Sheepshead Mountain fault site maps
B6 Catlow Valley and faults east of Summer Lake site maps

1
Chapter 1 Introduction
1.1 Motivation
Since the nineteenth century, understanding how landscapes evolve has been a
focus of geoscience research (Gilbert, 1877). One goal of geomorphological research is
to take a set of anomalous geomorphic observations in an actively deforming landscape
and tease out the tectonic processes that produced them (Burbank & Anderson, 2011).
Directly measuring tectonic processes is a time consuming, expensive, and highly site-
specific endeavor. One way to circumvent the challenge of directly measuring tectonic
processes is to utilize deformed landscape features (i.e., fluvial channels, terraces,
shorelines, etc.) to understand the tectonic perturbations that deformed the features.
Geomorphic features can act as a sort of tape recorder of the total accumulation of
tectonic deformation. Additionally, landscape features can record deformation over
timescales longer than a couple of earthquake cycles (103-10
5 years) and over large
spatial scales. With the advent of high-resolution elevation and imagery datasets, we can
make geomorphic observations readily and rapidly for large portions of Earth’s surface.
We can then utilize deviations in landscape form from what is expected in quiescent
environments to help tease out the tectonic perturbations that produced the anomalous
geomorphic signals over large swaths of Earth’s surface.
Over the last 25 years much attention has been given to understanding the
interplay between extensional tectonic geomorphology, normal fault evolution, and
stratigraphic architecture in rift basins (e.g., Gawthorpe & Hurst, 1993; Gawthorpe &
Leeder, 2000; Gupta et al., 1998; Dawers & Underhill, 2000; McLeod et al., 2002).

2
Normal fault growth has been well understood for several decades (e.g., Peacock &
Sanderson, 1991; Dawers et al., 1993; Cartwright et al., 1995, 1996; Childs et al., 1995;
Willemse, 1997; Cowie, 1998; Gupta & Scholz, 2000; Cowie & Roberts, 2001). More
recently, however, workers have sought to understand the impact extensional tectonics
has on an array of geomorphological processes and features such as fluvial incision
(Commins et al., 2005; Whittaker et al., 2007a, b, 2008; Kirby & Whipple, 2012)
drainage pattern and catchment evolution (Densmore et al., 2004; Cowie et al., 2006) and
scarp facet morphology (Topal et al., 2016). These studies are particularly useful
because they take advantage of a well-understood tectonic process and show how the
landscape responds. Interactions between geomorphological and tectonic processes
directly impact sedimentary transport and deposition, and therefore directly influence
both temporal and spatial patterns of synrift stratigraphy.
The over-arching goal of this dissertation is two-fold. Firstly, I take advantage of
a well-understood tectonic process - specifically the evolution of normal faults via fault
segment interaction and linkage - and investigate the impact this has on a landscape.
Secondly, I utilize geomorphic features to draw a clearer picture of extensional tectonic
processes on timescales longer than an earthquake cycle but shorter than geological
timescales. It is vital to have a clear picture of the influence of fault evolution (both
spatial and temporal) on geomorphological processes to fully realize the development of
stratigraphic sequences in extensional basins, many of which comprise important
hydrocarbon provinces.

3
1.2 Approach
Many insights into the structural and geomorphic evolution of normal faults can
be gleaned by focusing on so-called relay ramps. Relay ramps are structural features
between overlapping normal fault segments (Larsen, 1988) (Fig. 1.1a).
Relay ramps can provide sediment transport pathways from the eroding footwall block of
a fault array into the adjacent basin (Gawthorpe & Hurst, 1993; Gupta et al., 1999; Cowie
Fig. 1.1: (a) Block diagram of relay ramps along overlapping normal faults. (b) Map view of a single Andersonian normal fault with an illustration of how the surrounding Coulomb stress field changes following a slip event (Modified from Hodgkinson et al., 1996 & Cowie, 1998). (c) Map view and displacement profiles of three faults showing how zones of positive stress change affect displacement profiles and displacement rates on neighboring faults.

4
et al., 2006). Areas where faults overlap are generally topographically lower than the rest
of the fault array. Sediment transport systems can, therefore, exploit these lows and
utilize them as entry points into the hanging wall basin. When normal faults are in an
overlapping en echelon geometry they interact with one another such that they mutually
increase each other’s slip rate. When a single normal fault slips, stress in the surrounding
rock volume is reduced in some locations and increased in others (Fig. 1.1b). If a
segment is oriented such that a zone of positive stress change overlaps a neighboring
fault, slip on that segment makes slip more likely to occur on the neighbor (Fig. 1.1c)
(Cowie, 1998). Stress loading and reloading between neighboring faults initiates a
positive feedback, which ultimately increases the slip rate on portions of the overlapping
segments. Increases in slip rate, in this manner, lead to asymmetrical displacement
profiles with maxima that are skewed towards the overlap zone (Peacock & Sanderson,
1991; Willemse et al., 1996) (Fig. 1.1c).
The well-studied and predictable pattern of fault growth via segment interaction
and linkage provides a useful framework within which to study the geomorphological
response to faulting. Furthermore, by examining processes across of range of scales, we
can substitute space for time and use small fault arrays as the framework for
understanding the early landscape evolution in rifted terrains and large crustal scale fault
arrays for more mature tectonic landscapes. For example, studying the response of
fluvial channels that flow down relay ramps along small faults can provide insight into
the patterns of fluvial incision that reflect the landscape’s early evolution. Intermediate
length fault arrays provide insights into more evolved faults that are likely to have linked
segments, but may still be in the stage of localizing deformation on relay breaching
5
faults, which should have a signature in the landscape. Long fault arrays with large
segments, large total displacement and high slip rate exhibit footwall drainage catchments
that may vary in size and shape as parameters such as segment overlap and spacing
change. The research presented in this dissertation was carried out in order to address all
these issues.
1.3 Contributions of this dissertation
There are three primary objectives that I address in the following chapters. First, I
investigate how fluvial channels respond to the increase in slip rate that occurs when
small normal fault segments interact with one another and link. Second, I utilize
elements of the landscape, specifically paleoshorelines, to investigate faulting processes
along strike of the relay ramps post-linkage. In particular, I investigate where, along the
relay ramps deformation accumulates following linkage between segments. And third, I
examine how fluvial catchments on relay ramps evolve as a function of various fault
parameters such as fault length, fault spacing and relay length (fault overlap).
1.3 1 Changes in bedrock channel morphology driven by displacement rate increase
during normal fault interaction and linkage
The second chapter of this dissertation explores the impact of slip rate increase
driven by fault interaction and linkage on fluvial channels that drain relay ramps.
Previous work shows that changes in fault slip rate have profound impacts on surface
processes and overall landscape evolution (Densmore et al., 2003; Commins et al., 2005;
Cowie et al., 2006; Whittaker et al., 2007a, b, 2008; Kirby & Whipple, 2012). I examine

6
four relay ramp sites in this chapter; the faults associated with each ramp are overall
small, immature, and in various stages of interaction and linkage. The sites include an
unlinked pair of faults, two ramps that may or may not be partially breached by a linking
structure and one site where the overlapping faults are fully linked. I collected channel
slope and cross-sections with a GPS receiver along the length of the channels at each site.
In addition, I measured fault throw along the faults that border the relay ramps. Because
these channels are not active, I used the cross-sectional data to model flow with HEC-
RAS, a one-dimensional open channel flow model, to extract measurements of channel
width, water depth, and bed shear stress. The results show that the channels at three of
these sites display distinct geomorphological responses to the increase in slip rate
associated with fault interaction and linkage. Specifically, the channels are steeper and
narrower when clear indications of fault interaction (indicated by the asymmetrical
displacement profiles, Fig. 1.1c) are present. Moreover these geomorphological
responses are present when evidence that the faults are in the process of linking is
ambiguous.
1.3.2 Vertical deformation of lacustrine shorelines along breached relay ramps, Catlow
Valley fault, southeastern Oregon, USA
The third chapter of this dissertation investigates the structural evolution of relay
ramps, focusing on the timescale over which relay-bounding fault tips remain active post-
fault linkage. The ultimate fate of a relay ramp (i.e., whether it simply subsides into the
basin post-fault linkage or actively deforms post-linkage) influences sediment transport
systems that traverse the ramp. As such, it is crucial to fully understand what structural

7
processes might influence these systems. Previous work implies that, following fault
linkage, the former fault tips become inactive (Peacock & Sanderson, 1991; Cartwright et
al., 1996; Cowie, 1998). Analog models suggest, however, that the fault tips of the
former segments remain active post-linkage (Hus et al., 2005), but it has not been
documented in nature. In this chapter I map well-preserved late Pleistocene lacustrine
paleoshorelines along three fully breached relay ramps within the Catlow Valley fault
system in southeastern Oregon. Paleoshorelines are horizontal datums that can give
indications of where fault displacement has accumulated along strike of the linked fault
segments. Results show that shoreline elevations deviate from average shoreline
elevation along strike of the relay ramps. These results also show that fault slip has not
localized on the linking structures, despite the presence of fully formed linking faults.
This observation demonstrates that relays are subject to active deformation following
complete fault linkage for up to 104 years. The implication is that fluvial systems can
still be affected by this deformation and can considerably influence sediment transport
pathways and depocenter locations in early synrift basins.
1.3.3 The role of fault scale, overlap and spacing in controlling extensional relay ramp
fluvial system geometry
The fourth and final chapter of this dissertation examines both the structural and
geomorphic characteristics on the evolution of fluvial catchments that drain relay ramp
surfaces, across a wide spectrum of spatial and temporal scales. In Chapter 2, the fluvial
systems that drain the ramps are oriented such that flow is parallel to fault strike.
Previous work suggests this is typical and is what to be expected in nature (Gawthorpe &

8
Hurst, 1993, Gupta et al., 1999); however, numerous examples exist where this is not the
case (Jackson & Leeder, 1994; Densmore et al., 2003; Athmer & Luthi, 2011; Duffy et
al., 2015). Instead of flowing parallel to fault strike, some relay channels flow across the
outboard fault scarp and bypass the ramp altogether (Fig. 1a). The purpose of this
chapter is to examine what structural parameters are associated with particular relay ramp
fluvial geometry. Twenty-seven sites are examined in the Basin and Range (including
sites discussed in Chapters 2 and 3), and the parameters measured are relay ramp area,
area of the relay ramp that drains parallel to fault strike, outboard fault length, ramp
width (i.e., fault spacing) and length (i.e., fault overlap). The results show that at
outboard fault lengths of less than ~15-20 km, a majority of the relay ramp area drains in
the direction that is parallel to fault strike. At fault lengths greater than ~20 km, there is
no association between fault length and fluvial geometry. High overlap/spacing ratios are
associated with relays along shorter (< 20 km long) outboard faults, whereas lower
overlap/spacing ratios are associated with relays along longer faults. Overlap/spacing
ratio and fault scale relationships suggest that lower overlap/spacing ratio relays may be
more common along longer outboard faults because they survive for longer periods of
time in the landscape.

9
Chapter 2
Changes in bedrock channel morphology driven by displacement rate increase
during normal fault interaction and linkage
This chapter was published in Basin Research.
HOPKINS, M.C. & DAWERS, N.H. (2015) Changes in bedrock channel morphology driven
by displacement rate increase during normal fault interaction and linkage. Basin
Research, 27, 43-59. doi: 10.1111/bre.12072.
2.1 Abstract
We attribute changes in the morphology of relay ramp channels (increased slope
and decreased width) to variations in displacement rate on ramp-adjacent normal faults.
We map the faults and fluvial channels associated with four sites in different stages of
fault interaction and linkage on the Volcanic Tableland, a middle Pleistocene ash-flow
tuff in east central California. Because these channels are inactive today, we estimate
downstream changes in channel width and depth using HEC-RAS, a one-dimensional
open channel flow model. Our results show that channel slope must be greater than about
0.05 before there are substantial decreases in width or substantial increases in depth.
Displacement rate increases during interaction between en echelon segments results in
the increases in channel slope and decreases in channel width. Moreover, our data show
that these changes begin to occur during the very early stages of fault interaction, well
before the fault geometry would indicate ongoing or imminent linkage.

10
2.2 Introduction
Changes in fluvial channel morphology have been widely used to infer changes in
rock uplift rate (Duvall et al., 2004), changes in fault activity (Commins et al., 2005;
Whittaker et al., 2007a, b, 2008; Kirby & Whipple, 2012), and to predict the evolution of
fluvial systems in response to fault interaction and linkage (Densmore et al., 2003; Cowie
et al., 2006). Fluvial channels that flow down relay ramps, i.e., the region between
overlapping normal fault segments, are highly sensitive to displacement rate changes and
deformation associated with fault interaction and linkage (Fig. 2.1).
Because relay ramps occur across an evolutionary spectrum, from simple fault overlaps
to deformed ramps that are breached by linking faults, they offer unique opportunities to
investigate patterns of bedrock channel incision, including progressive changes in
Fig. 2.1. Schematic block diagram of a relay ramp, adjacent faults and a fluvial channel that drains the relay ramp.

11
channel slope and width. Relay ramps are especially useful because temporal and spatial
changes in the rock uplift field occur in predictable ways. Our aim here is to examine a
set of small fluvial channels on relay ramps associated with normal fault segments in
different stages of fault interaction and linkage, located on the Volcanic Tableland of
northern Owens Valley in eastern California, USA. We describe the manner in which the
longitudinal profiles and channel widths evolve through various stages of relay
development, by placing these observations within the framework of fault array and relay
ramp evolution. The ultimate goal here is to examine changes in bedrock channel
morphology by using the temporal framework defined by the fault array evolution.
2.2.1 Rationale for this study & expected transient channel responses
The rationale for this study is that, by combining bedrock channel data with fault
displacement data from field sites in different stages of fault interaction and linkage, we
will be able to examine the bedrock channel response to increased slip rate associated
with fault evolution. We can take advantage of anomalies in the fault displacement
profiles to determine the degree of interaction between segments when evidence of a
definitive linking structure is lacking. Using the fault array and relay geometry as a
proxy for time facilitates comparison between channel morphology that is slightly
perturbed by faulting versus channel morphology that is strongly affected by fault
interaction and linkage.
Because of the increase in cumulative fault displacement across each stage of
relay evolution, we anticipate that increases in channel slope associated with the
increasing tilt of the ramp, and base level change associated with fault slip events, should

12
drive progressive incision of the channels. Understanding the controls on channel width
in bedrock channels remains an active area of research in geomorphology (Whipple,
2004; Finnegan et al., 2005; Wobus et al., 2006; Turowski et al., 2006; 2007). One
outstanding issue is how width adjusts when a channel experiences differential rock uplift
(e.g., Amos & Burbank, 2007; Yanites & Tucker, 2010). Examining relay ramp channels
in different stages of fault interaction and linkage allows us to substitute these stages as a
proxy for time, and examine how channel slope and width changes through time.
Commins et al. (2005), utilized bedrock channels to constrain the timing of the
displacement rate increase and found that channel morphology was affected enhanced
displacement rates. We take this a step further and examine the detailed channel
morphology changes to understand the fluvial response to fault interaction and linkage.
Such integrated studies of channel response and the faulting process have been, thus far,
under-utilized (Kirby & Whipple, 2012).
2.2.2 Using fault array and relay geometry as a proxy for time
Normal faults typically grow by the linking of en echelon segments to form larger
faults (e.g., Cartwright et al., 1995; Dawers & Anders, 1995). Cowie (1998) showed that
the en echelon geometry arises from patterns of stress change associated with fault slip.
Moreover, if en echelon faults are in an optimal geometry where zones of positive stress
change overlap, a positive feedback develops where slip on one fault reloads its neighbor,
making it more likely to fail (Cowie, 1998). Ultimately, this causes displacement rates to
increase on both fault segments (Fig. 2.2). This has been observed in both numerical
13
models and natural settings (Cowie, 1998; Commins et al., 2005) and has been identified
as a key mechanism responsible for increased basin subsidence rates in evolving rift
basins (Gupta et al., 1998; Cowie et al., 2000; Dawers & Underhill, 2000).
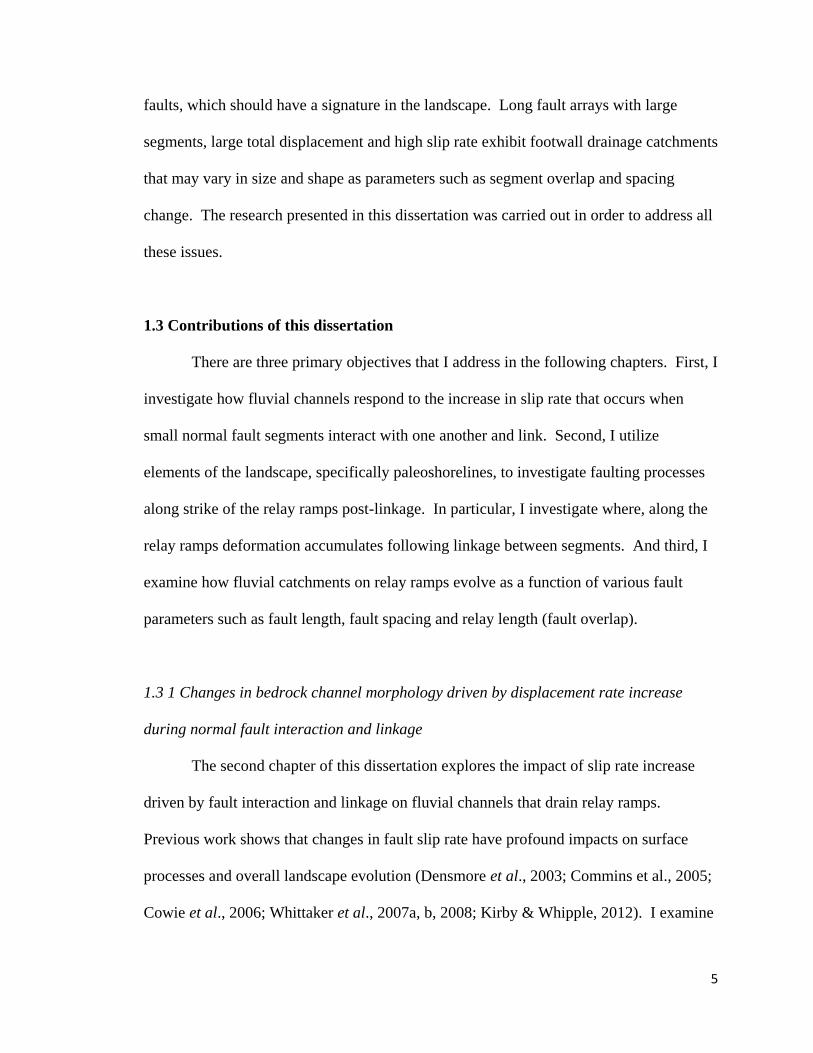
Positive stress feedback between en echelon fault segments produces several
anomalies in fault characteristics that are indicative of fault interaction. Fault segments
that are not interacting with other structures are expected to have symmetrical
displacement versus distance profiles, where the displacement maximum occurs near the
center of the segment and displacement tapers to zero at the fault tips (Cowie & Scholz,
1992; Dawers et al., 1993). Deviations from this pattern are, however, hallmark
Fig. 2.2. (a) Map view of two faults that grow in isolation at time T1, started interacting at time T2, and link at time T3. Time intervals are constant. (b) Displacement profiles of faults shown in part (a). Note free fault tip propagation of non-interacting tips versus arrested propagation in the overlap zone. Asymmetric displacement profiles are deviations from the ideal case of non-interacting faults and are strong indications of interaction.

14
indications of fault interaction (Willemse et al., 1996); these include asymmetrical
displacement profiles and steep displacement gradients on overlapping fault tips (Fig.
2.2).
Relay ramps are also recorders of the fault array evolution. As the segments
evolve, the ramps are initially little-deformed, but as displacement accrues and
displacement gradients on the interacting overlapping faults become steeper, the ramps
tend to tilt more steeply toward the mutual hanging wall (Peacock & Sanderson, 1991)
and slip events occur more frequently (Cowie, 1998). In addition, fault splays and small
faults begin to partially breach the ramp. At a later stage, a linking fault will transect the
relay, physically linking to the two segments (Peacock & Sanderson, 1991; Trudgill &
Cartwright, 1994).
Taken together, the nature of the relay ramps and the characteristics of fault
displacement patterns along the adjacent normal faults provide a temporal framework
within which to unravel patterns of bedrock channel evolution. In other words, relay
channel sites can be identified in terms of three developmental stages: a channel draining
a simple fault overlap with limited evidence of fault interaction, a channel on a partially
breached relay ramp that exhibits, for example, steep displacement gradients on the
overlapping faults, and finally a scenario in which a relay channel has clearly been
perturbed by a linking fault developed fully across the relay ramp.
2.3 Geological Setting
The study area is located in northern Owens Valley in east-central California, at
the western margin of the Basin and Range province. Owens Valley is a transtensional

15
basin located within the Eastern California Shear Zone (ECSZ), a zone of dextral shear
originating from differential motion of the Pacific plate relative to the North American
plate (Dokka & Travis, 1990a). Since 6-10 Ma, the ECSZ has accommodated
approximately 25% of the strike-slip motion along the plate boundary (Dokka & Travis,
1990b; Miller et al., 2001; Dixon et al., 2003).
Northern Owens Valley is, in part, defined by the Volcanic Tableland, which is
composed of the welded portion of the Upper Pleistocene Bishop Tuff. Emplacement of
the Bishop Tuff took place ca. 758.9 +/- 1.8 ka, as a result of a voluminous pyroclastic
eruption from Long Valley Caldera (Sarna-Wojcicki et al., 2000), located north-
northwest of the Tableland. The Bishop Tuff is a welded rhyolitic tuff and is roughly 150
meters thick on average (Gilbert, 1938). Lithologically, the Bishop Tuff is relativity
uniform but stratigraphic distinctions can be made on the degree of welding, types of
lithic fragments, and chemical variations in pumice and air fall deposits (Gilbert, 1938;
Bateman, 1965; Wilson & Hildreth, 1997).
The Tableland surface is characterized by joints and fumarole mounds, which are
abundant and probably formed soon after emplacement, a population of north-south
striking normal faults and an inactive stream network. The fault network and fluvial
channels formed since emplacement of the tuff and represent the deformational and
erosional history of the Tableland over the last ~760,000 years (Gilbert, 1938; Bateman,
1965; Pinter, 1995; Pinter & Keller, 1995). The channel patterns in plan-view show that
the stream network formed as a result of the evolving fault population geometry; trellis
patterns are evident and some channels are sourced from uplifted footwalls (Bateman,
16
1965; Pinter & Keller, 1995; Gilpin, 2003). Thus the area offers a unique opportunity for
investigating fault interaction and linkage and its impact on the landscape.
Most Tableland faults appear to be purely extensional, though some strike-slip
motion may be accommodated by the en echelon arrangement of some segments
(Bateman, 1965; Pinter, 1995); the individual fault segments we examine in this study
exhibit only normal slip. Because of relatively limited erosion across the upper surface
of the Tuff (Goethals et al., 2009), scarp height is a proxy for cumulative fault
displacement (Bateman, 1965, Dawers et al., 1993; Dawers & Anders, 1995; Pinter,
1995; Ferrill et al., 1999). The area of the Tableland examined in this study consists of
mostly en echelon arrangements of fault segments, with each segment being less than ~2
km in length (Fig. 2.3).
Most of the faults in the array discussed here dip to the west; however a few small
faults within the array are antithetic. The timing of fault initiation on the Volcanic
Tableland is unknown. While no historical surface rupturing earthquakes have originated
from a Tableland fault, surface fractures developed near some Tableland faults during the
1986 Chalfant Valley earthquake sequence (Lienkaemper et al., 1987). Some faults
within the population were active in the latest Pleistocene as evidenced by offset fluvial
terraces of the Owens River near the southern edge of the Tableland (Pinter et al., 1994).
The Tableland’s channels tend to be relatively small, with most being only a few meters
wide and less than 1 m deep (Fig. 2.4). These channels appear to have been created by
fluvial processes due to the abundance of features such as flutes, potholes, and plunge
pools. Channel flow appears to have followed the regional depositional slope of the ash-
flow sheet from northwest to southeast (Bateman, 1965; Pinter & Keller, 1995), but as

17
they interacted with the evolving fault population many channels were diverted by local
fault-related topography and channelized flow also developed on relay ramps.
Fig. 2.3. 1:12,000 Digital Orthophoto Quarter Quadrangle (DOQQ) showing field sites examined in this study, courtesy of the U.S. Geological Survey. The DOQQ is the northwest part of the Fish Slough 7.5’ (1:24,000) Quadrangle, Inyo County, California. Channel location and flow direction indicated by lines with arrows. Tick marks are on downthrown side of faults. Latitude and longitude of eastern and northern boundaries are noted.

18
The channels discussed here flow down relay ramps, and were locally sourced from the
fault array’s footwall and were mapped only to the base of the relay ramp.
The channels are not presently active but they are thought to have been active
several times since emplacement of the Bishop Tuff. The pre-Tahoe and Tahoe
glaciations are two time periods when the channels were likely active (Pinter & Keller,
1995); however this has not been definitively shown. Gilpin (2003) obtained cosmogenic
26Al and
10Be dates on a relay channel system just west of the sites studied here and
concluded that channel occupation dates from ~70 ka to ~300 ka. Though the history of
channel occupation is not completely known, what is important to our study is that the
Fig. 2.4. Photographs of Tableland bedrock channels. (a) ~ 1 m high relay ramp knickpoint, (b) imbricated clasts. Locations are noted in Fig. 2.3.

19
channel incision is coeval with Tableland fault evolution, and that channel morphology
here is driven by local faulting (Bateman, 1965; Pinter & Keller, 1995; Gilpin, 2003).
Subsequent to channel abandonment, we do not see evidence of widespread channel
modification by blanketing of aeolian deposits. Furthermore, our observations suggest
that hillslope processes have probably not significantly modified Tableland channels
subsequent to abandonment. We reach this conclusion based on the fact that the current
climate is dry, slopes are relatively low across the Tableland, and primary channel
features are preserved.
While we acknowledge the fact that the channel geometry can be modified by
fault displacement while the channels are inactive, what is important to note here is that
our primary interest is in the relative states of channel deformation. Because each site we
have chosen represents a discrete point in time relative to fault interaction and linkage,
we are only investigating the relative deformation associated with each stage. For
example, if we examine two sites in which one is clearly at a more advanced stage of
interaction/nearing linkage, we would expect the channel to be more deformed (i.e.,
higher slopes) due to increases in displacement rate. Although channel deformation may
very well occur while the channels are inactive, we expect deformation during these
inactive periods will be partitioned in such a way that channels on ramps at advanced
stages of interaction/linkage have experienced more deformation than ramps in earlier
stages. Furthermore, we see no evidence for post-abandonment activity within any of the
channels. We do not observe any vertical offset of fluvially abraded rock surfaces within
any channel at a location where we have interpreted a linking fault. This observation

20
suggests that post-abandonment surface rupturing fault activity on the linking structures
has not occurred.
2.4 Methods
Within our study area, we mapped the faults and fluvial channels associated with
four field sites, including one pair of unlinked en echelon faults and three relay ramps,
two of which are partially breached by a linking fault and one that is fully breached (Fig.
2.3). We chose these sites because they offer the opportunity to investigate the evolving
fault geometry and channel response across a temporal spectrum from unlinked to
completely linked faults. In addition, we focused on channels having similarly sized
drainage areas, which are given on Fig. 2.3. The drainage areas represent the total area
drained by each catchment upstream of its outlet and were calculated using a combination
10 m DEM and GPS points obtained in the field.
2.4.1 Field data
We mapped the faults and channels using a Trimble GeoXH-2008-3000 Series
handheld GPS receiver connected to an external antenna that is capable of 10 cm post-
processing vertical accuracy. Faults adjacent to each field site were mapped by walking
the crest and base of the fault scarps (i.e., the footwall and hanging wall cutoffs, see Fig.
2.1) through the fault relay zone. Channels were mapped along the thalweg, moving
upstream until geological evidence of channelized flow (e.g., evidence of thalweg or
channel banks) could no longer be discerned. We define our study channels as ‘bedrock’
if rock outcrops in the channel banks and bed or if channel cover is only a veneer. We

21
surveyed channel cross-sections perpendicular to the flow direction, at a spacing that
varies from about 10 to 100 m. Where channel morphology changes rapidly, we used
smaller cross-section spacing and used larger spacing where channel morphology
displays little variation.
Fault cutoff plots were generated by projecting field data points onto a line that
best represents average fault strike, as determined from aerial photographs. The average
strike of each fault was found by mapping it on aerial photographs using ESRI’s ArcGIS
software. We then found the slope-intercept form of the strike line by using UTM
northing and easting coordinates as ‘x’ and ‘y’ Cartesian coordinates. Because the
shortest distance between the strike line and any point along the cutoffs is a straight line,
we know the slope of that line is perpendicular to the mapped strike line. We can then
define the equation of a line that goes through any data point and the strike line. With
two equations we algebraically solved for the intersection of two lines; the coordinate
pair (expressed in UTM) is used as the projected coordinates. By projecting the cutoffs
onto an average fault strike, errors in the throw gradient that are associated with the
collection process (because they were not collected in a straight line) are reduced. The
result is a realistic visualization of the cutoff geometry. We generated fault throw plots
by subtracting the elevation of data points on the hanging wall cutoff from the elevation
of data points on the footwall cutoff, provided both points are within 1 m of each other
laterally. Error in fault throw plots should not be significant at 1 m increments.
Channel longitudinal profiles and channel slope were plotted directly from the
field data. Profiles were generated by plotting the elevation associated with each data
point and accumulating the straight-line distance between them. Profiles reflect channel

22
length because the channels do not meander and the data coverage is dense enough to
capture true channel length. Slope plots are 200 m running averages of slope calculated
in the upstream direction. Because we wanted to retain as much slope data from the
upstream and downstream ends of the channels as possible, while at the same time reduce
noise, we chose a 200 m window. By choosing at 200 m window, we reduced noise (i.e.,
larger windows did not significantly alter the slope plots) and we retained as much data
as possible.
To account for the possibility of lithological variation, we measured rock
competence with a Schmidt hammer. Rock strength should not vary much because all of
our sites are entirely within the Bishop Tuff, but knickpoints could be generated because
of local lithological variability related to degree of welding. We collected 15 Schmidt
hammer measurements from both the upstream and downstream sides of 7 knickpoints
and calculate the mean, maximum and minimum rebound values. Measurements were
collected on horizontal surfaces with the Schmidt hammer held vertically above the rock
surface. Care was taken to avoid measurements adjacent to joints and we only took
measurements on intact bedrock surfaces.
2.4.2 HEC-RAS models
In order to examine how channel morphology changes in the Tableland channels
we must have some way of objectively examining morphology that is free of
interpretation bias. Because the fluvial channels on the Tableland are no longer active,
we cannot directly measure channel width and depth, so we use HEC-RAS v.4.1.0, a
freely available one-dimensional open channel flow model developed by the U.S. Army

23
Corps of Engineers. We use HEC-RAS to model flow in our study channels and extract
measurements of depth, width and bed shear stress under different flow regimes and
discharge scenarios. We define depth here as the maximum water depth in the active
channel, width as the water width at the top of the flow, and shear stress as the product of
the unit weight of water, hydraulic radius and energy slope (U.S. Army Corps of
Engineers, Hydrological Engineering Center). Here, slope used by HEC-RAS is
calculated from the cross-section elevations. The advantage of HEC-RAS for this study
is that it offers an opportunity to unambiguously extract channel width and depth. It is
difficult to use our field data alone to define channel width and depth, especially because
the channels are not active. After processing the GPS data we imported channel cross-
sections into the model and set the necessary flow parameters. All cross-sections were
entered into HEC-RAS by inputting the distance and elevation associated with each GPS
point collected in each cross-section. Next, the lateral distance between each cross-
section is entered. To perform the flow models, HEC-RAS requires discharge,
Manning’s ‘n’, boundary conditions, a flow regime, and coefficients of fluid expansion
and contraction. For more details on HEC-RAS model equations, parameters used, and
data collection see Appendix A.
Once the channel geometry and flow parameters were selected we ran two flow
models for each channel: one at half-discharge and one at full-discharge (discharge does
not change downstream for each model, see Appendix A for full discussion). Full-
discharge is the largest amount of water that can be contained within all the cross-
sections associated with each channel. Half-discharge is simply half of the full discharge.
Values of width, depth and bed shear stress from both model runs are averaged between

24
the two runs and plotted. On Figs. 2.7, 2.8, and 2.9 the plotted lines show the average
values of width, depth, and bed shear stress and the bars show the range between full and
half discharge. We chose this method because it allows us to see where the modeled flow
is responding to changes in channel morphology rather than discharge.
2.4.3 Reference width
In order to make an assessment of how width changes in our study channels, we
include a reference width in Figs. 2.7, 2.8 & 2.9, which we obtained by using the width-
area scaling relationship. In the width-area relationship W = kAx, ‘W’ is channel width,
‘k’ is some coefficient, ‘A’ is drainage area, and ‘x’ is some power ranging from 0.3-0.5
(Hack, 1957; Whipple, 2004; Whittaker et al., 2007a). Although we make the
simplifying assumption that discharge is not changing downstream (which would mean
we hold drainage area ‘A’ in the width-area scaling relationship constant for a given site)
it is, nonetheless, instructive to have a reference with which to see how channel geometry
changes from what would be ‘expected’. To determine the reference width, we first set
‘x’ to 0.5 (see Whittaker et al., 2007a) and find the value of ‘k’ that best fits the width-
area relation for the unlinked faults channel. We plot the reference width line on the
same graph as the HEC-RAS model width and adjust the ‘k’ value until the difference
between the average model width and reference width is the smallest. We then take the
coefficient that results in the best match between the model and reference width and
apply it to the other three sites. Even though slope does increase in the downstream
direction for some portion of the channel reach at the unlinked faults, it has a negligible
influence on width. The average width of the channel where slope decreases downstream
25
is 5.61 m and with the addition of width measurements where slope increases
downstream, average width is 5.64 m. We took this approach because the unlinked faults
site is the most representative of quiescence.
2.5 Results
2.5.1 Fault data
For each fault we describe the general fault geometry, asymmetry in both cutoff
geometry and throw profiles, and the maxima. Upper plots in Figs. 2.5 and 2.6 illustrate
cutoff geometry of major ramp bounding faults and lower plots show throw versus
distance profiles for each fault.
2.5.1.1 Unlinked faults
The unlinked faults consist of two en echelon faults without evidence of a linking
fault (Fig. 2.5a-c). Based on the cutoff plots (Fig. 2.5b), the upper part of this ramp tilts
towards the inboard fault and the ramp as a whole has a fairly constant slope towards the
south. Note that there are two local maxima on the inboard fault displacement profile
(Fig. 2.5c), which suggests the inboard fault is actually composed of two linked, nearly
co-planar, segments. Throw maxima on the inboard and outboard faults do not exceed 15
m.
2.5.1.2 Partially breached ramp 1
The fault geometry at partially breached ramp 1 is more complex than at the
unlinked faults site. There are two primary faults, i.e., the inboard and outboard
segments, and two smaller faults (fault splays) that bifurcate from the outboard fault. A
noticeable change in strike of the outboard fault toward the inboard fault is an indication

26
that the faults are in the process of linking, so we call this relay ramp ‘partially’ breached.
Fig. 2.5. Fault cutoffs and throw profiles for the unlinked faults and faults near partially breached ramp 1. (a & d) Map view of relay ramps, their associated faults, and the channels that drain the relays, (b & e) projected fault cutoffs, (c & f) throw profiles. Note the slight inboard fault asymmetry and off centered throw maximum associated with inboard fault in ‘c’. Note that the inboard fault throw profile ‘f’ at partially breached ramp 1 is highly asymmetrical (the inboard fault is the continuation of outboard fault in Fig. 6d). Cumulative throw is shown for fault splays. Throw profile asymmetry with off-centered throw maxima are indications of fault interaction, therefore the unlinked faults are interacting but not linked; faults at partially breached ramp 1 are interpreted to be in the process of linking.

27
Cutoff data and the throw profiles show a highly asymmetric inboard fault (Fig. 2.5e &
f). The ramp tilts, in general, towards the inboard fault over its entire length. The slope
of the ramp towards the south is fairly constant from 0 to 500 m on the ‘x’ axis (Fig.
2.5e) but does increase slightly from 600-750 m. The throw maxima on these faults are
35 m on the outboard fault, ~60 m on the inboard fault and ~20 m on the fault splays
(note that only cumulative throw of the splays is shown).
2.5.1.3 Partially breached ramp 2
The cutoff plot (Fig. 2.6b) shows that the inboard fault is actually two faults that
are linked; however the throw profile (Fig. 2.6c) resembles that of a single fault, so we
show cumulative throw only. We apply the term partially breached here because of the
presence of a nascent linking fault, but the fault has not completely breached the ramp.
This ramp does not tilt toward either the inboard or outboard fault and the slope towards
the south is essentially constant. The faults associated with partially breached ramp 2
have throw maxima of ~35 m on the outboard fault, ~25 m on the inboard fault, and < 15
m on the breaching fault.
2.5.1.4 Fully breached ramp
At the site of the fully breached ramp, the inboard and outboard faults are clearly
linked by a single fault (fault labeled linking fault Fig. 2.6d). The outboard fault throw
profile is highly asymmetric (Fig. 2.6e); note that this fault is the continuation of the
inboard fault in Fig. 2.5e. The inboard fault throw profile here is slightly asymmetric
(Fig. 2.6f). The ramp does not consistently tilt toward either the inboard or outboard fault
and the slope of the ramp toward the hanging wall (south) is fairly uniform. Throw

28
maxima are ~45 m on the outboard fault, ~20 m on the inboard fault and < 10 m on the
linking fault.

29
2.5.2 Channel Data
2.5.2.1 Unlinked faults
The channel bed is predominantly alluvial with bedrock outcrops only at the
channel head and mouth. The channel profile at this site (Fig. 2.7a) contains a minor
convex reach ~250 m upstream of the channel mouth (see Figs. 2.5 and 2.6 for maps of
all channel planforms). The running average of channel slope is highest at the channel
outlet and decreases in the upstream direction to 500 m upstream of the mouth. In
general, slope increases from 500 m upstream of the outlet to the channel head (Fig.
2.7b). Channel width varies by about 3 m along the length of the channel, and the
channel contains two areas between 0 and 750 m upstream of the channel mouth where
width narrows below the reference width (Fig. 2.7c). Depth fluctuates considerably
through most of the channel reach but, moving upstream from the channel mouth, depth
does show an unambiguous decrease around 250 m and 750 m. (Fig. 2.7d). Bed shear
stress is less than 30 N/m2 (Fig. 2.7e) and shows no clear change in association with
changes in either depth or width. The only feature that bed shear stress appears to have
any correlation with is the increase in slope from 250-0 m upstream of the channel
mouth.
Fig. 2.6. Fault cutoff and throw profiles for partially breached ramp 2 and the fully breached ramp. (a & d) Map view of relay ramps, their associated faults and the channels that drain the relays, (b & e) projected fault cutoffs. (c & f) Throw profiles of faults associated with fully breached ramp. Faults at partially breached ramp 2 are interpreted to be at a more advanced stage of linkage than partially breached ramp 1 because of the presence of a fault that nearly breaches the entire relay ramp. The data gap in the throw profile on the outboard fault is due to a breaching fault. Note that the outboard fault here is a continuation of the inboard fault in Fig. 2.5f. Inboard and outboard faults are fully linked. Data gaps (solid lines) along the outboard fault throw profile of both ‘c’ and ‘f’ are related to breaching faults.

30
Fig. 2.7. Field data and HEC-RAS model results for the channel at the unlinked faults site. (a) Longitudinal. (b) 200 m running average of channel slope. (c) Channel width. (d) Depth. (e) Bed shear stress. A minor convex reach near the channel mouth is related to the incorporation of a small fault (see Fig. 5c). Slope decreases from a maximum of ~ 0.03 at the channel mouth to below 0.02 about 500 m upstream of the channel mouth. Moving upstream, slope increases through the rest of the channel reach. Trends in width, depth and bed shear stress do not consistently follow increase in slope.

31
2.5.2.2 Partially breached ramp 1
The channel profile at partially breached ramp 1 shows a prominent convex reach
from ~400 to ~750 m upstream of the channel mouth (Fig. 2.8a). Moving upstream, the
running average of channel slope dramatically increases at the downstream end of the
fault overlap zone and reaches a maximum of value of 0.09 about 500 m upstream of the
channel mouth (Fig. 2.8b). Channel width varies by ~4 m through the channel reach
(Fig. 2.8c). Substantial changes in width are noted from 0 to ~100 m upstream of the
channel mouth; however, these variations are not associated with any significant changes
in the profile or slope. Just downstream of the fault overlap zone, width narrows ~ 4 m
below the reference width and remains 3-4 m narrower than the reference width until
~750 m upstream of the channel mouth. Although width increases upstream of 750 m
above the channel mouth by 1-3 m, some width measurements are below the reference
width. Water depth fluctuates by about 0.15 m through the channel reach. There are
definite increases in depth associated with slope values above ~0.05 and width values
below the reference width (Fig. 2.8d). One large increase in depth associated with a
notable decease in slope is noted ~100 m upstream of the channel mouth. Bed shear
stress varies from ~10 to ~100 N/m2 and reaches a maximum near the maximum values
of slope and minimum width values (Fig. 2.8e). Bed shear stress increases through the
channel from 0 to ~400 m upstream of the channel mouth and, in general, decreases
upstream.
2.5.2.3 Partially breached ramp 2
Two profile convexities are evident in the channel profile from partially breached
ramp 2; one convexity is located about 300 m upstream of the channel mouth and the

32

33
second is located about 600 m upstream of the channel mouth (Fig. 2.8f). The
downstream convexity is located at the breaching fault (Fig. 2.8f). Although the fault
does not intersect the channel at the surface (its tip is located about only about 10 m
away) it is likely present at depth. The running average of slope reaches a maximum
value of ~0.08 in the downstream convex reach. The upstream convex reach also shows
elevated slope values, but they are not as high as in the downstream convex reach. In
general, most measurements of channel width fall below the reference width (Fig. 2.8h).
Channel width is highly variable at this site but two features are noteworthy. The lowest
width measurements fall ~4 m below the reference width in the vicinity of the highest
slope values. Channel width also falls below the reference width in the vicinity of the
second convex reach by 1-4 m. There are places where width varies significantly both
above and below the reference width, but it is worth mentioning that lower widths are
only sustained through the downstream convex reach. Upstream about 1000 m from the
channel mouth, width is highly variable both above and below the reference width.
Similar to width, depth is also highly variable (Fig. 2.8i). In general, depth appears to
decrease in the upstream direction. Shear stress is highly variable but higher values (>75
Fig. 2.8. Field data and HEC-RAS model results for channel at partially breached ramp 1 (a-e) and partially breached ramp 2 (f-j). (a) Longitudinal profile of channel at partially breached ramp 1. (b) 200 m running average of channel slope. (c) Channel width. (d) Depth. (e) Bed shear stress. (f) Longitudinal profile of channel at partially breached ramp 2. (g) 200 m running average of channel slope. (h) Channel width. (i) Depth. (j) Bed shear stress. Profile and slope plots for partially breached ramp 1 (a & b) show one broad convex reach with maximum slopes approaching 0.09, associated with substantial decreases in width below the reference width, increases in depth, and increases in bed shear stress. Profile and slope data for partially breached ramp 2 (f & g) show two convex reaches. The downstream convex reach has slope values approaching 0.08 and is associated with sustained decreases in width, increases in depth, and increases in shear stress. While decreases in width, increases in depth and increases in shear stress are noted through the upstream convex reach (slope maximum approaching 0.05) they are not as substantial, nor are they sustained.

34
N/m2) are noted in the vicinity of the two convex reaches (Fig. 2.8j). The highest shear
stress value (~175 N/m2) is associated with the linking fault.
2.5.2.4 Fully breached ramp
One profile convexity is present and is coincident with the linking fault in the
fully breached ramp (Fig. 2.9a). Two peaks in the running average of slope are obvious
(Fig. 2.9b): one is associated with the linking fault and the other, which is the highest
slope observed in this channel, is located within 100 m of the channel head. The slope
plot in Fig. 2.9b is noticeably different from Fig. 2.8b & g, in that there are two
‘plateaux’ (~400-600 m upstream of the channel mouth) in the slope profile of Fig. 2.9b.
Slope, in general, increases from the channel mouth and reaches a value of ~0.065 just
downstream of the linking fault. We attribute the decrease in in slope here to be related
to backtilting of the footwall of the linking fault. Moving in the upstream direction from
the linking fault, slope decreases then increases again to reach a maximum of ~0.075.
Most width measurements upstream of ~250 m above the channel mouth fall below the
reference width by 0.5-5 m. Decreases in width below the reference width in this channel
are associated with increases in slope. Water depth (Fig. 2.9d) shows a general decrease
in the upstream direction, but it is highly variable. Width also decreases below the
reference width through what we term ‘bedrock ridges’. Here, the channel is paralleled
on either side by elevated linear ridges of bedrock. There appears to be an association
between the bedrock ridges and lower width values. The ridges may represent a local
lithological variation within the Bishop Tuff because they are not laterally extensive, but
we cannot say for certain why these ridges exist. Shear stress is highly variable and
appears to increase from 0 to 400 m upstream of the channel mouth then seems to

35
Fig. 2.9. Field data and HEC-RAS model results for channel at fully breached ramp. (a) Longitudinal profile, (b) 200 m running average of channel slope. (c) Channel width. (d) Depth. (e) Bed shear stress. Profile and slope data (a & b) show a distinct convexity associated with the linking fault. Width, depth and shear stress do not appear to follow trends in slope. Except for distinct geometric changes associated with channel confinement due to the bedrock ridges (see text), elevated slope values alone do not appear to be associated with decreases in width below the reference width, increases in water depth, or increases in shear stress.

36
fluctuate, but the highest shear stress measurements are associated with the steepest
slopes and lowest width measurements (Fig. 2.9e).
2.5.3 Schmidt Hammer Data
We collected 210 Schmidt hammer rebound measurements on the downstream
and upstream sides of seven knickpoints in channels on partially breached ramp 1 and 2.
Figure 2.10 shows the maximum, mean and minimum values for rebound measurements.
There appears to be no difference (p = 0.06) in mean Schmidt hammer rebound values on
the downstream and upstream side of knickpoints (Fig. 2.10).
2.6 Interpretations
Our results indicate that channel morphology is substantially affected by
displacement rate increase during fault interaction and linkage. During the very earliest
stages of interaction, for example partially breached ramp 1, channel morphology appears
to respond by increasing slope, decreasing width, and increasing depth. Though we
Fig. 2.10. Mean, maximum and minimum rebound values of 210 Schmidt hammer measurements on the upstream and downstream sides of seven knickpoints. The knickpoints are located in channels at partially breached ramp 1 and 2.
37
interpret morphological changes in our study channels to be driven by displacement rate
increase, we also discuss the potential impact that climate fluctuations and lithological
variability have on our results. We do not attribute these changes to a manifestation of
progressive surface deformation of the ramp surface. We reach this conclusion because
changes in cutoff gradients, which are the best information we have on the three
dimensional orientation of the ramp surfaces, do not correlate with changes in channel
morphology.
2.6.1 Fault interaction and linkage: Effects on channel morphology
Our results show that the channel at the unlinked faults exhibits a general
decrease in slope from the channel mouth to about 500 m upstream of the channel mouth
(Fig. 2.7a & b), however, slope increases from 500 m above the channel mouth to the
channel head. The area of higher slope near the channel mouth is attributed to the
incorporation of a small fault, as evidenced by a local maximum in throw profile (Fig.
2.5c). The fault throw profiles suggest that the faults at this site are interacting, but to a
lesser degree than our other sites; therefore this channel represents the least perturbed site
we have examined. Although slope does show an increase over a portion of the channel
reach (from 500 m upstream of the channel mouth to the head), width does not
systematically change with the slope changes, nor does depth or shear stress. This
observation suggests that slope must either 1) increase to some threshold value before
width unambiguously responds, or 2) the gradient in slope must be sufficiently high for
width to respond.

38
Our data on the channel morphology at partially breached ramp 1 show that slope
increases and reaches a maximum within the fault overlap zone (Fig. 2.8a). In addition,
width decreases, depth increases just downstream of the steepened reach, and shear stress
increases through the steepened portion of the channel (Figs. 2.8c-e). The fault throw
profiles show significant asymmetry indicating that the faults are interacting more
strongly than the unlinked en echelon faults (Fig. 2.5f) and may, in fact, be close to
linking. The peaks in slope and shear stress in this channel are spatially coincident with
maximum throw on the fault splays, and the region of increasing slope occurs over the
length of the splays. The perturbation in this channel is probably not related directly to
interaction between the inboard and outboard fault segments. We interpret the channel
perturbation to be related to the presence of the fault splays. It is not entirely clear
whether the fault splays are the future site of linkage between the inboard and outboard
segments. The presence and growth of the fault splays are probably heavily influenced
by interaction between the inboard and outboard fault, as evidenced by steep throw
gradients on the splays and a high throw maximum relative to the inboard and outboard
segments.
We observe two convex reaches in the channel at partially breached ramp 2. The
presence of a linking fault (see Fig. 2.6a) indicates that the faults at this site are at a later
stage of linkage than either the unlinked en echelon faults or partially breach ramp 1.
While two areas of elevated slope are noted in this channel, width, depth and shear stress
do not show a consistent response. If we examine the downstream area of elevated slope
we observe an unmistakable decrease in width (4 m below the reference width) a subtle
increase in depth and an increase in shear stress (Fig. 2.8g). However, if we examine the

39
upstream convex reach, decreases in width are not so clear-cut. While there are decreases
in width, they are not, overall, as substantial as the downstream convex reach, nor do all
width measurements fall below the reference width. This ambiguous response is
similarly noted in depth measurements. While shear stress does show a substantial
increase in the upstream convex reach, elevated shear stress values are not sustained
through this reach as they are in the downstream convex reach. These observations
suggest that there may be a threshold slope value beyond which there is an unmistakable
response. If we compare the results of partially breached ramp 1 and 2, both show that a
threshold slope value of ~0.05 is required before width and depth show a clear, persistent
response.
In the case of the fully breached relay, we see no evidence of channel profile
convexities except for the one clearly related to the linking fault; however, width and
depth are highly variable. Additionally, the highest slope values in the channel appear to
be confined to the upstream half of the channel (Fig. 2.9b). Based on the presence of a
completely through-going linking fault, we interpret this site to be the most advanced, in
terms of the fault evolution, of all the sites we examined. Because the fully breached
ramp has already experienced the increase in displacement rate associated with the onset
of fault interaction, this channel probably had the most time to adjust to the imposed
perturbation. In the same vein as our interpretations for the partially breached cases, we
expect that where slope is >0.05, width, depth and shear stress should show a clear
response (i.e., narrowing, deepening, and increasing respectively). However, there is not
a sharp response. Although there are clearly elevated slope values above 0.05, there are
not sustained decreases in width, increases in depth or increases in shear stress. The only

40
area where there are distinct and sustained decreases in width are where the channel is
flanked by the bedrock ridges. While elevated slope values are coincident with changes
in width, depth and shear stress, it appears that elevated values in both slope and the
gradient of slope may actually be important in causing spatially sustained and
unambiguous changes in channel geometry. In every case we examined, our data clearly
show that sustained changes in width, depth and shear stress, are associated with slope
values that must be above about 0.05 and that the gradient of slope must be sufficiently
high (see partially breached ramp 1 and 2 slope plots Fig. 2.8b/g for comparison to Fig.
2.9b).
Clearly, the values of width, depth and bed shear stress may not reflect the actual
values when these channels were active in the past. Nevertheless, the trends contained
within the HEC-RAS modeled data make physical sense. This is supported by Fig. 2.8
and 2.9 that show prominent convexities in the longitudinal profiles and field evidence of
channel confinement (i.e., bedrock ridges), where we expect width to decrease, depth to
increase and bed shear stress to increase.
2.6.2 Lithology and climate
We acknowledge that convexities in the longitudinal profile of a channel may be
generated by a number of factors including base level lowering due to other factors (i.e.,
climate induced base level lowering) or lithological variation (Phillips & Lutz, 2008). In
this section we discuss the effects lithology and climate have on our study. While we do
not see evidence suggesting lithological variation or climate-driven base level lowering
are important factors here, we do not wish to dismiss them outright.
41
All of our sites are entirely within the Bishop Tuff, but knickpoints could be generated
because of local lithological variability in degree of welding and the presence of distinct
units within the overall tuff sheet (Wilson & Hildreth, 1997). The data shown in Fig.
2.10 do not appear to be consistent with variations in rock competence. We find no
substantial difference between the mean values of Schmidt hammer rebound
measurements on the upstream and downstream sides of knickpoints, and therefore
conclude that differences in rock strength cannot explain the observed knickpoints.
Although the Volcanic Tableland’s channels are inactive today, previous work
suggests that they have been active during Sierran glaciations in the Late Pleistocene
(Bateman 1965, Pinter & Keller, 1995). We see no evidence that would suggest that
climate fluctuations can explain the channel responses observed here. We postulate that
climate variations would affect our sites more or less uniformly because they are only a
few km from each other and catchment areas for all our sites are around 0.3 km2. Any
climate driven channel responses should affect all the sites approximately equally.
Because we do not observe uniform channel responses across our study area, we
conclude that climate fluctuations are likely not responsible for channel morphology
change that we observe.
2.7 Discussion
Figure 2.11 summarizes our interpretation of the morphological response of a
relay ramp channel to displacement rate increase. A schematic plot of displacement rate
versus time (Fig. 2.11a) shows how displacement rate increases at the onset of fault
interaction (Fig. 2.11b; Cowie, 1998).

42
The onset of fault interaction causes the channel profile, initially at equilibrium, to
deform (Fig. 2.11c) and as this interaction continues, channel deformation continues.
Following physical linkage, the channel profile regains a concave up form (except for the
convexity at the linking fault), but width and depth are still highly variable.
Fig. 2.11. Schematic cartoon showing the morphological evolution of a Tableland relay ramp channel. (a) Plot showing displacement rate before and after the onset of fault interaction. (b) Displacement vs. distance plots and schematic map of non-interacting fault segments and interacting fault segments. (c) Idealized channel slope and width plots illustrating how we interpret a relay ramp channel to respond to displacement rate increase associated with fault interaction. Pre-Interaction: Assumed equilibrium or near equilibrium conditions, predicted width assumes some width-drainage area relationship (i.e., W α A
x,
see text). During fault interaction slope responds to enhanced displacement rate by increasing within the overlap zone; compare with data in Fig. 2.8b & g. Our data show that width shows a clear and sustained response only in conjunction with slopes above ~0.05.
43
One of the significant findings of this work is that we see evidence of channel
response to enhanced displacement rate before the fault geometry would even suggest
linkage. Cowie (1998) has shown through numerical models that displacement rate
increases at the onset of fault interaction, before the establishment of a linking structure.
Our results are in agreement with this and work by Commins et al. (2005) who showed
that knickpoints in bedrock channels were the result of interaction and linkage of three
fault segments in the Canyonlands, Utah. Our work supports the conclusion reached by
Commins et al. (2005) in that our data show that displacement increase (as reflected by
changes in channel morphology) occurs very early in the interaction phase.
Our observations can be compared with results of coupled landscape/tectonic
models. For example, coupled landscape/tectonic models by Cowie et al. (2006) showed
that fluvial networks at rift margins are strongly influenced by sets of interacting fault
segments that alter local topography and control catchment geometry. One of the
primary aims of the Cowie et al. (2006) model was to use the amount of incision to
estimate sediment volume delivered to the hanging wall of the fault array. In their model,
channel incision is driven by changes in slope and channel width does not change. While
they acknowledged the fact that channel width may depart from the scaling relationship
(𝑊 ∝ 𝐴 𝑥, where W is channel width and A is catchment area to some power ‘x’; see
Whittaker et al. (2007a)), they do not allow channel width to vary within the model. The
primary drawback with this assumption is that there are implications for fluvial incision.
Attal et al. (2008) showed that allowing width to vary as a function of slope and
discharge, as defined by Finnegan et al. (2005), caused the catchment to respond to

44
changes in tectonic activity more rapidly than if width were tied to discharge (or drainage
area) alone.
Our results show that width and depth in channels near interacting fault segments
appear to show sustained decreases and increases, respectively, only when slope is above
about 0.05. This notion implies that bedrock channels may only show unambiguous
responses to differential rock uplift once a high enough gradient has been imparted on the
channel flowing across the uplift. The notion of a threshold is not new. Previous work
has suggested that, at relatively low uplift rates channel morphology can be insensitive to
change due to a threshold effect (Turowski et al., 2007). On the other hand, the existence
of this threshold means that at more rapid tectonic rates, information may be gleaned
about the tectonic uplift field in areas where transient slope perturbations are no longer
preserved, but narrowed channel reaches remain. Amos and Burbank (2007) observed
that fluvial channels narrowed in response to transient perturbations in the slope profile
generated by differential uplift. The channel slopes Amos and Burbank (2007) observed
were less than half of the 0.05 slope threshold that we observe on the Volcanic Tableland.
This discrepancy, however, makes physical sense because their channels were of
comparable size, but bedrock (our study) is more difficult for a channel to incise into than
alluvium (Amos and Burbank, 2007) and would, therefore, require higher slopes. The
magnitude of the observed slope threshold is no doubt highly site specific in that channel
size, bed cover, discharge and bedrock type will affect channel incision and, therefore,
would necessitate a different threshold slope.
The results discussed here have implications for studies that model relay ramp
catchment evolution along fault systems at crustal scales. One issue that remains poorly

45
understood in these systems is when relay catchments (such as the ones we study here)
transition from watersheds where the bulk of water and sediment is directed toward the
base of the ramp to those that bypass the ramp. Densmore et al. (2003) modeled relay
catchment evolution and concluded that competition between fault array evolution and
catchment erosion exerted a fundamental control on the evolution of the catchments.
Densmore et al. (2003) interpreted that headward erosion of catchments on the outboard
fault scarp controls whether relay catchments are ultimately captured. We suggest that
displacement rate increase is a plausible mechanism that can explain their observation. If
displacement rate increase causes the relay channel system to incise faster than
catchments on the outboard fault scarp can erode, then the relay drainage area will remain
relativity intact.
2.8 Conclusions
Displacement rate increase during normal fault interaction and linkage exerts a
clear control on bedrock channel morphology in channels that flow between en echelon
normal fault segments. Channel longitudinal profile convexities, increased channel
slope, decreased channel width, increased depth, and elevated bed shear stress are strong
indications that channels respond to enhanced displacement rates during the earliest
stages of fault interaction. Our data suggest that width only shows a clear and sustained
response below a reference width once slope increases above about 0.05. Furthermore,
the effects of the displacement rate increase appear to occur before the fault geometry
would indicate linkage, which is in agreement with previous observations (Commins et
al., 2005). Our work implies that coupled landscape/tectonic models of rift margins and

46
range front fault systems may underestimate the impact of displacement rate increase has
on the landscape. Displacement rate increase has profound morphological effects on
channels that flow between interacting en echelon normal fault segments and should be
carefully considered in future studies that aim to predict landscape evolution in response
to fault segment interaction and linkage.
47
Chapter 3
Vertical deformation of lacustrine shorelines along breached relay ramps, Catlow
Valley fault, southeastern Oregon, USA
This chapter was published in Tectonophysics
HOPKINS, M.C. & DAWERS, N.H. (2016) Vertical deformation of lacustrine shoreline
along breached relay ramps, Catlow Valley fault, southeastern Oregon, USA.
Tectonophysics, 674, 89-100, doi: 10.1016/j.tecto.2016.02.015
Abstract
Vertical deformation of pluvial lacustrine shorelines is attributed to slip along the Catlow
Valley fault, a segmented Basin and Range style normal fault in southeastern Oregon,
USA. The inner edges of shorelines are mapped along three breached relay ramps along
the fault to examine the effect of fault linkage on the distribution of slip. Shoreline inner
edges act as paleohorizontal datums so deviations in elevation from horizontal, outside of
a 2 m error window, are taken to be indications of fault slip. The sites chosen represent a
spectrum of linkage scenarios in that the throw on the linking fault compared to that on
the main fault adjacent to the linking fault varies from site to site. Results show that the
maturity of the linkage between segments (i.e., larger throw on the linking fault with
respect to the main fault) does not control the spatial distribution of shoreline
deformation. Patterns of shoreline deformation indicate that the outboard, linking, and/or
smaller ramp faults have slipped since the shorelines formed. Observations indicate that
displacement has not fully localized on the linking faults following complete linkage
between segments.

48
3.1 Introduction
Extensional faulting plays a role in driving large scale landscape morphology
change over the life time of a fault system (Cowie et al., 2006; Gawthorpe & Hurst,
1993; Gawthorpe & Leeder, 2000; Kirby & Whipple, 2012). In the last decade, work has
focused on particular landscape elements, such as fluvial channels, and how they can be
used to better understand processes such as changes in fault slip rate (e.g., Whittaker et
al., 2008, 2007a, b) and normal fault interaction and linkage (Commins et al., 2005;
Hopkins & Dawers, 2015; Whittaker & Walker, 2015). Geomorphic features are useful in
this respect because they can survive within the landscape for significant amounts of time
(~105 years) and can record changes in tectonic activity over these timescales.
Deformation over these intermediate, or geomorphic, timescales gives us an important
perspective because they are more representative of long term tectonics than single events
(Burbank & Anderson, 2011). This is especially true because tectonic processes that
control landscape evolution may not manifest on timescales of an earthquake cycle.
Here we use the deformation of pluvial lacustrine shorelines along the footwall
escarpment of a segmented normal fault as a proxy for fault slip, in order to test whether
en echelon fault tips remain active after segment linkage. Shorelines have previously
been used to study fault related deformation and rock uplift because they are useful
paleohorizontal datums (e.g., Anderson & Menking, 1994; Choi et al., 2008; Merritts &
Bull, 1989; Oldow & Singleton, 2008; Scott & Pinter, 2003; Yildirim et al., 2013). The
utility is that these datums serve a dual purpose, i.e., the ability to measure both the
vertical deformation along the fault and the spatial distribution of that deformation along
strike. We expect that if the overlapping portions of a linked pair of faults remained
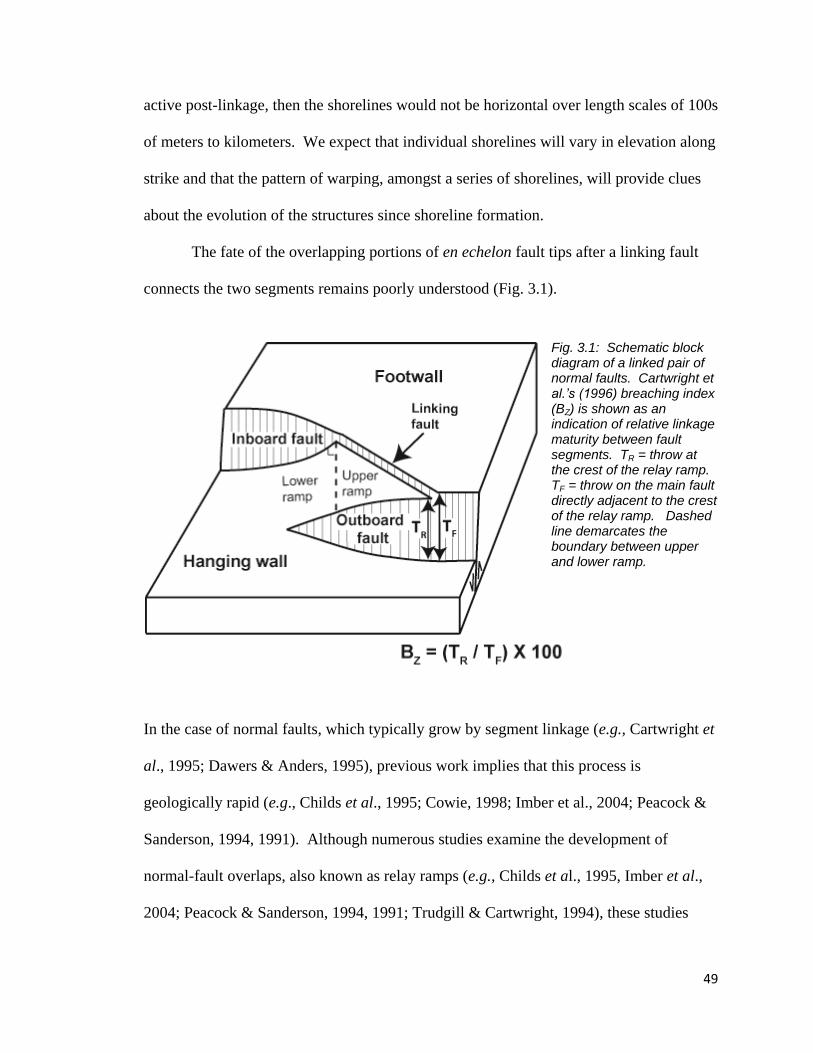
49
active post-linkage, then the shorelines would not be horizontal over length scales of 100s
of meters to kilometers. We expect that individual shorelines will vary in elevation along
strike and that the pattern of warping, amongst a series of shorelines, will provide clues
about the evolution of the structures since shoreline formation.
The fate of the overlapping portions of en echelon fault tips after a linking fault
connects the two segments remains poorly understood (Fig. 3.1).
In the case of normal faults, which typically grow by segment linkage (e.g., Cartwright et
al., 1995; Dawers & Anders, 1995), previous work implies that this process is
geologically rapid (e.g., Childs et al., 1995; Cowie, 1998; Imber et al., 2004; Peacock &
Sanderson, 1994, 1991). Although numerous studies examine the development of
normal-fault overlaps, also known as relay ramps (e.g., Childs et al., 1995, Imber et al.,
2004; Peacock & Sanderson, 1994, 1991; Trudgill & Cartwright, 1994), these studies
Fig. 3.1: Schematic block diagram of a linked pair of normal faults. Cartwright et al.’s (1996) breaching index (BZ) is shown as an indication of relative linkage maturity between fault segments. TR = throw at the crest of the relay ramp. TF = throw on the main fault directly adjacent to the crest of the relay ramp. Dashed line demarcates the boundary between upper and lower ramp.
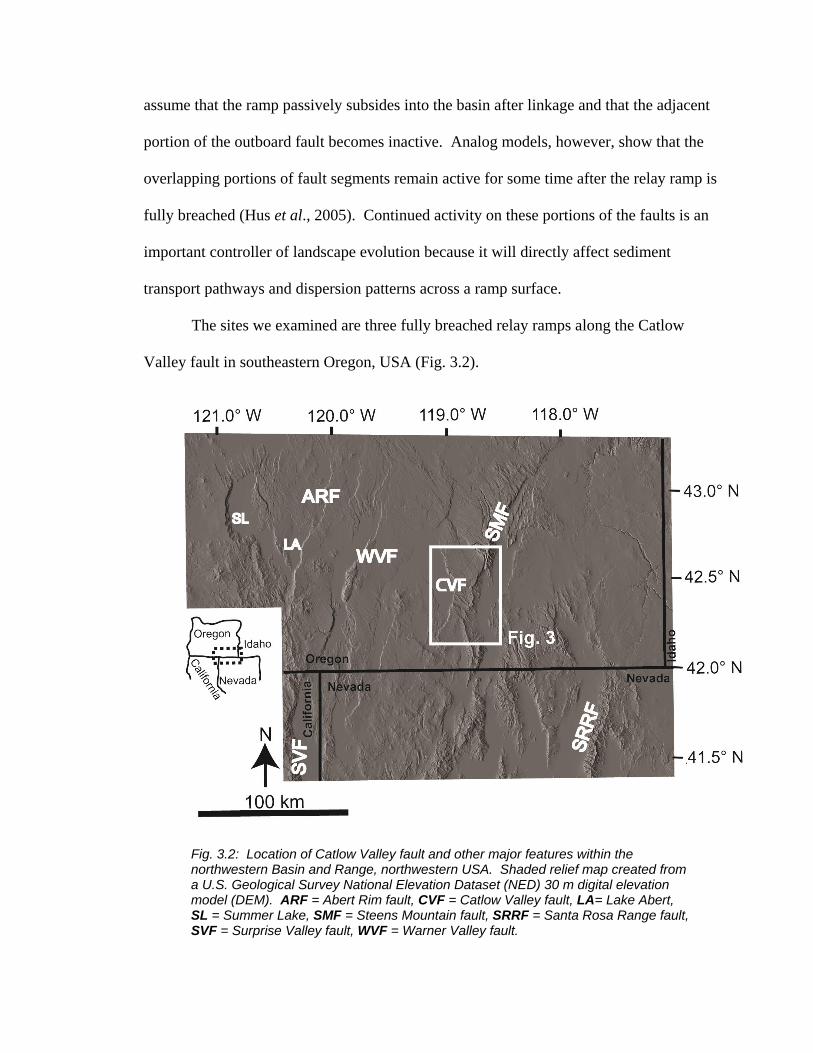
50
assume that the ramp passively subsides into the basin after linkage and that the adjacent
portion of the outboard fault becomes inactive. Analog models, however, show that the
overlapping portions of fault segments remain active for some time after the relay ramp is
fully breached (Hus et al., 2005). Continued activity on these portions of the faults is an
important controller of landscape evolution because it will directly affect sediment
transport pathways and dispersion patterns across a ramp surface.
The sites we examined are three fully breached relay ramps along the Catlow
Valley fault in southeastern Oregon, USA (Fig. 3.2).
Fig. 3.2: Location of Catlow Valley fault and other major features within the northwestern Basin and Range, northwestern USA. Shaded relief map created from a U.S. Geological Survey National Elevation Dataset (NED) 30 m digital elevation model (DEM). ARF = Abert Rim fault, CVF = Catlow Valley fault, LA= Lake Abert, SL = Summer Lake, SMF = Steens Mountain fault, SRRF = Santa Rosa Range fault, SVF = Surprise Valley fault, WVF = Warner Valley fault.

51
The ramps are footwall breached, meaning the linking fault extends from the inboard
fault tip to the outboard fault and breaks the upper portion of the ramp. This orientation
is the expected way a linking fault breaches a ramp based on numerical models (Crider &
Pollard, 1998). The sites we chose cover a range of linkage scenarios from a relatively
immature linkage to relatively mature one. Our purpose is to examine shoreline elevation
changes relative to segment linkage to investigate how the ramp deforms post-linkage
and where that deformation occurs within the relay ramps over geomorphic timescales.
3.2 Geological Setting
The study area is in the Catlow Valley located within the Basin and Range in
southeastern Oregon, USA (Fig. 3.2). The Catlow Valley fault is a ca. 65 km long, north-
south striking normal fault system (Fig. 3.3) that displaces lava flows associated with the
16.6 ± 0.02 Ma old Steens basalt (Hooper et al., 2002). The topographic expression of the
fault system is a steep escarpment, up to several hundred meters high. It is made up of at
least six linked segments; unfortunately there is no direct slip rate information on any of
these segments. Fault chronology is not directly known but we bracket fault initiation to
between 16.6 and approximately 10 Ma, using the age of the Steens basalt (Hooper et al.,
2002) and the onset of Basin and Range extension in southeastern Oregon (Scarberry et
al., 2010). A population of northwest striking faults, smaller in scale than the Catlow
Valley segments, is present but do not appear to have any structural control over the
Catlow segments. We interpret these faults as being related to the Brothers fault zone,
which is zone of distributed normal faults that are generally more pronounced northwest
of Catlow Valley (Scarberry et al., 2010; Weldon et al., 2002).

52
Fig. 3.3: Shaded relief map of Catlow Valley fault (based on the 10 m DEM), showing the maximum extent of Paleolakes Catlow and Alvord based on the highest late Pleistocene shorelines in the basins. The extent of Paleolake Alvord here is similar to previous interpretations of the late Pleistocene extent of that lake (Reheis, 1999; Reheis et al. 2014.

53
3.2.1 Paleolake Catlow and other Pleistocene northwestern Basin and Range pluvial
lakes
Pluvial lake shorelines are present along the Catlow Valley fault escarpment
(Vander Meulen et al., 1988); as many as seven can be observed in some locations but
not all are spatially extensive (Fig. 3.4).
These shorelines are evidence that a substantial lake (10s of km in width and length and
up to 50m deep) once occupied Catlow Valley in the geologically recent past. The
shorelines are prominent features along the Catlow escarpment (Fig. 3.4a), extending for
Fig. 3.4: (a) Google Earth perspective of relay ramp ‘A’ showing seven well preserved shorelines on the outboard fault scarp. Although seven shorelines are noted here they are not all spatially continuous along strike. Arrows point to individual shoreline inner edges. Field of view shown in Fig. 3.6a. (b) Field photograph showing a Catlow Valley shoreline. Note differences in color of terrace tread and terrace riser due the abundance of sand versus basalt boulders. The location of this photograph is south of relay ramp ‘C’, its location is noted in Fig. 3.3.

54
10s of km and are visible in aerial imagery and digital elevation models (DEMs). These
terraces are likely associated with the ultimate regression of Paleolake Catlow. Little
information exists on the paleolake and what work does exist only acknowledges the
presence of shorelines (Vander Meulen et al., 1988). Two key pieces of information
indicate that the shorelines formed during the last lake cycle regression. This is also why
the shorelines are appropriate features to use for this study. One, the shorelines are very
well preserved for long distances along the fault escarpment. If the shorelines have been
altered by hillslope processes, these will act over the entirety of the shorelines, and any
degradation in elevation is expected to be relatively uniform along the escarpment. Thus
elevation differences along a particular shoreline will reveal where more deformation has
accumulated (as reflected by shoreline warping). The second piece of information is the
fact that the shorelines are not superimposed over one another. The key observation here
is that if there were shorelines associated with older lake cycles we would expect to see
older, warped shorelines with younger, less deformed ones superimposed over them.
Because we do not observe this phenomenon, we conclude that the shorelines along the
Catlow Valley fault segments were formed during the ultimate lake cycle regression.
Other large pluvial lakes existed during the late Pleistocene in the northwestern
Basin and Range (Adams & Wesnousky, 1998; Carter et al., 2006; Ibarra et al., 2014;
Licciardi, 2001; Oldow & Singleton, 2008; Reheis et al, 2014). Catlow Valley is in close
proximity to Alvord Basin, located a few 10s of km to the east (Fig. 3.3). These two
fault-controlled basins share a common footwall, the Steens Mountain fault block, which
experienced late Pleistocene glaciations (Evans & Geisler, 2001). U-shaped valleys
created during these glaciations terminate in both basins, thus Paleolake Catlow would

55
have experienced climatological and hydrological conditions similar to that of late
Pleistocene Paleolake Alvord. Two sets of shorelines, known as the Serrano and Alvord
terraces, are recognized along the Steens Mountain fault escarpment in the Alvord basin.
The Alvord terraces are distinct in that the Serrano terraces are topographically higher,
more discontinuous, and channelized by fluvial erosion, whereas the Alvord terraces are
topographically lower, well-preserved, and have not been significantly degraded by
fluvial erosion (Oldow & Singleton, 2008). The Alvord terraces are thought to have
formed between 20 and 11 ka, whereas the Serrano terraces are thought to have formed
about 130-200 ka (Oldow & Singleton, 2008). The Catlow Valley shorelines are
probably of very similar age to the Alvord terraces and nearby Paleoakes Surprise and
Chewaucan (see Interpretations & Discussion).
A requirement for our study is that the shorelines must be younger than the
linking faults that breach the ramps. Although we have no direct age constraints on the
shorelines or faults, we argue that the linking faults must be significantly older than the
shorelines. We reach this conclusion based on two primary pieces of evidence. First,
normal faults arrange themselves into en echelon patterns and begin linking very early in
the evolution the fault system (Cowie, 1998) and Catlow Valley fault has likely evolved
over millions of years (Scarberry et al., 2010). Conversely, shorelines in Alvord Basin,
other nearby lacustrine basins, and Catlow Valley, date to the late Pleistocene (Reheis et
al., 2014). From this it is clear that the fault linkage events considerable predate
shoreline formation.

56
3.3 Data and Methods
High resolution 1 m digital orthophoto quarter quadrangles (DOQQs), a 10 m
digital elevation model (DEM) and field observations are utilized to map deformed
pluvial lacustrine shorelines along the Catlow Valley fault escarpment. The DOQQs and
DEM are products of the U.S. Geological Survey National Elevation Dataset (NED). The
geomorphic feature that we mapped is the slope break between the various terrace risers
and terrace treads, here termed inner edges (Fig. 3.5a). We chose this because the inner
edges give the best representation of paleohorizontal because there is a definable
relationship between the inner edges and the lake surface when the individual shorelines
formed (e.g., Adams & Wesnousky, 1998, Hare et al., 2001). The shorelines that are
mapped in this study are ones that are most continuous along fault strike and that can be
mapped on either side of the site of fault linkage along the breached relay ramps. It is
important to note that we are interested only in deviations of individual shorelines from
horizontal rather than changes in elevation between shorelines; interpretations based on
the latter would require assumptions about lake volume and a complete chronology.
Our field sites consist of three relay ramps that have been completely breached by
linking faults. The sites span a range of linkage scenarios from a relatively immature
linkage to mature ones. We characterize linkage maturity by utilizing Cartwright et al.’s
(1996) breaching index (BZ), which is the ratio of throw measured at the crest of a
breached relay ramp (TR) to throw on the adjacent fault (TF), multiplied by 100 (Fig. 3.1).
The purpose of BZ is to convey the relative stages of fault linkage evolution in a
segmented fault system. In other words, for breached relay ramps within the same fault
system, we can assign values of BZ and use it to discern the relative maturity of linkages

57
(Cartwright et al., 1996). This provides the ability to compare deformation patterns
across an evolutionary spectrum of breached relay ramps. To assess where the
deformation is accumulating geometrically, each relay ramp is divided into two regions,
upper and lower, based on the fault geometry. The division (Fig. 3.1) demarcates the
regions of the relay ramps that are bounded by the inboard and outboard segments
(lower) and the outboard and linking segments (upper).
We utilize ArcGIS v. 10.0 to display and analyze the DOQQs (Fig. 3.5b), the
DEM and the derivative maps (slope and curvature maps) generated from the DEM.

58
The shoreline inner edges are located and mapped using a combination of the DOQQs
and a curvature map. We use these two data types in conjunction with one another
because they offer the most straightforward and objective way of both identifying and
mapping the inner edges. The DOQQs are useful because terrace rises are darker in color
due to the abundance of basalt boulders, whereas treads are lighter in color due to the
presence of sandy material. We clearly see this distinction in our field observations (Fig.
3.4b). The curvature map is useful because we can classify the morphology of the
shorelines objectively based on the DEM. We classify the curvature map such that we
can display zero and negative curvature separately from positive curvature. Positive
curvature indicates a surface is concave up whereas negative curvature indicates a surface
is concave down. A curvature of zero indicates a flat surface (Fig. 3.5c). By displaying
the curvature in this manner we map the interface between positive and negative/zero
curvature, which is the shoreline inner edge. We then drape the curvature map over the
DOQQ to map shoreline inner edges. In areas where the curvature map and DOQQs
deviate on the position of the inner edge, we map it using the DOQQ because the
resolution is higher (1 m/pixel).
Shoreline inner edge elevation data are extracted from the DEM and plotted.
With regards to the elevation data, we make two considerations. First, we consider
Fig. 3.5: (a) Schematic block diagram of a flight of shorelines and their features. (b) 1 m/pixel Digital Orthophoto Quarter Quadrangle (DOQQ) of mapped shoreline inner edges (black lines). (c) Schematic cartoon of a shoreline in profile view. The shoreline features are indicated as well as areas of zero, negative and positive curvature. The interface between positive curvature and zero-negative curvature demarcates the shoreline inner edge and facilitates mapping. (d) Curvature map draped over the same DOQQ shown in part ‘b’. Note the interface between curvature classes coincides with our field observation of terrace treads and risers (sand vs. boulders) as noted in undraped DOQQ. In rare instances where curvature map and DOQQ disagree we mapped the features using the DOQQ because the resolution is higher. DOQQ courtesy of U.S. Geological Survey.
59
vertical deformation of these shorelines to be only minimum measurements, because
hillslope diffusion and mass wasting along the Catlow Valley fault escarpment has
presumably altered inner edge elevation. There is field evidence of talus above some
shorelines. In particular, we avoided mapping the uppermost shoreline, which is the most
heavily affected and obscured by this material. Although we have no way of knowing
how much they have been altered, we are confident that these processes should have
affected our study sites similarly. This is because the factors that would drive different
rates of erosional processes (i.e., slope morphology and climate) are presumed to not
change from site to site in our study area. With this in mind, although we may only
capture minimum values of vertical deformation, we still gain invaluable insight into
relative amounts of deformation between the field sites.
A second consideration is error. We use a 2 m error to account for the vertical
resolution of the DEM and vertical error related to the inner edge relationship to water
surface. Land cover in the study area is mostly grassland with some shrubs, and the
standard deviation of vertical accuracy for NED data for these two land cover classes is
1.55 m and 2.17 m, respectively (Gesch et al., 2014). Due to the fact the study area is
mostly grassland, we are confident that a 2 m error accounts for the vertical error in the
DEM. Another source of error that must be addressed is variability in the elevation of the
inner edge relative to the paleolake level. Previous work has shown that there is a
consistent difference between the elevation of inner edges and mean water level. For
example, Locke & Meyer (1994) show that for 105 modern inner edge elevation
measurements, the inner edges are, on average, 1.8 ± 0.3 m above mean lake level.
Similarly, Hare et al. (2001) found that inner edge elevation was on average 1.3 ± 0.4 m

60
higher than what those authors interpreted as paleolake level. A 2 m margin of error,
therefore, captures well shoreline elevation variability due to DEM vertical resolution and
geomorphic relationships. Other authors have also noted similar errors (~2 m) between
water level and constructional shoreline sedimentological features in both modern and
ancient shorelines (Adams & Wesnousky, 1998; Atwood, 1994). This lends support to
our use of a 2 m error and we are confident that potential geomorphic variability is
captured by this error.
Although we show several shorelines at similar elevations from different sites, we
make no attempt to correlate them to one another. Additionally, we do not map all of the
shorelines at all the sites. For this work we simply use the warping patterns (outside of a
2 m error) of individual shorelines as proxies of fault slip. Shorelines were excluded
because they cannot be mapped on both sides of the site of fault linkage or the shoreline
is discontinuous and cannot be objectively identified in remote sensing data.
The location of the fault trace with respect to the shorelines is not precisely
known at our sites. The shorelines likely meander between the footwall and hanging wall
of the fault, which makes mapping of the fault trace difficult. We can infer in some
locations that the fault trace lies between two adjacent shorelines if a topographically
higher shoreline is up warped and an adjacent, lower shoreline is down warped. Each
data plot is marked with lines with arrowheads showing where streams have incised into
the shorelines; these localized areas are not taken into consideration when describing the
shoreline deformation patterns.
61
3.4 Results
The sites shown here represent a suite of relay ramps across a range of breaching
indices, from relatively immature relay ramp ‘A’ (BZ = 93; Fig. 3.6) to relatively mature
ramps ‘B’ and ‘C’ (BZ values of 54 (Fig. 3.8) and 38.5 (Fig. 3.9), respectively). In this
section we describe the patterns of vertical and horizontal shoreline deformation along
the outboard fault of these breached relay ramps. Here, any measurable shoreline
elevation deviations above or below the average shoreline elevation outside of the 2 m
error window are termed elevation anomalies. Shoreline elevation data are extracted
from the DEM and are shown in Figs. 3.6b, 3.7b,c, 3.8b, & 3.9b. A moving average is
applied to the extracted DEM data and is shown in Figs. 3.6c, 3.8c, & 3.9c. The moving
average is performed over about 250 m along the shorelines and smooths the high
frequency variations that are less than 2 m amplitude. The moving average also smooths
elevation anomalies related to fluvial incision, though as mentioned locally incised areas
are culled from the interpretation. It is from these smoothed profiles that we interpret the
elevation
anomalies. The elevation versus distance plots are not projected, i.e., are plotted in true
distanced along each mapped shoreline. The anomalies, as we interpret them, are the
accumulated result of an unknown number of slip events of unknown size on the inboard,
outboard and/or linking faults that may have been surface rupturing or blind. As a result,
we cannot say with certainty what the anomalies should look like with respect to
wavelength. We can, however, say that the larger the amplitude of an anomaly (i.e.,
deviation from average shoreline elevation) is on a shoreline or a greater number of
anomalies present indicate either larger slip events or a larger number of smaller events.

62
3.4.1 Relay Ramp ‘A’
Figure 4.6 shows the elevation profiles of the inner edges of four shorelines along
the most immature breached relay ramp (BZ = 93). The four shorelines are designated
A1, A2, A3, and A4. A1 is the lowest topographically and A4 is the highest. Variation
in shoreline inner edge elevation is most variable on the upper shorelines (A3 and A4;
Fig. 3.6). Shorelines A4 and A3 contain 4 elevation anomalies each that deviate as much
as 2 m from average shoreline elevation outside of the 2 m error window (Fig. 3.6c).
Shoreline A2 contains only 2 anomalies (< 2 m, but outside of the 2 m error) and
shoreline A1 contains no anomalies.
We do not see a ubiquitous pattern where up-warping on a shoreline is met with
spatially consistent down-warping on a topographically lower shoreline. We expected
that the fault trace would up-warp a shoreline on the footwall and down-warp a shoreline
on the hanging wall. However, it is difficult to find a surface expression of the fault trace
this way. The absence of this pattern indicates a complex trace expression (i.e., multiple
bifurcating and/or discontinuous splays) of the fault in the near-surface or, on the other
hand, that the fault is blind. Although there are areas locally within relay ramp ‘A’ where
up-versus down-warping patterns are associable between shorelines, this pattern is
sustained, vertically only through, at most, two shorelines. Most of the anomalies are
clustered within 2 km on either side of the site of fault linkage. There are noticeably
more anomalies (5 total) in shoreline elevation between the site of fault linkage and the
boundary between the upper and lower ramp. There are only 2 anomalies in the lower
ramp.

63

64
Figure 3.7a shows two shorelines, R1 and R2, located within relay ramp ‘A’ that
are therefore useful in addressing the tilting of the relay ramp. For the most part, the
shoreline inner edges do not vary in elevation outside of the 2 m error. The only area
where shoreline elevation change is significant outside of the error occurs between 0 and
100 m on the distance axis of Fig. 3.7b & c. The largest variation in inner edge elevation
is 4 ± 2 m. Based on the direction and amount of inner edge elevation change, the lower
shoreline, R1, is tilted an average of 1.8° toward 290° and the upper shoreline, R2, is
tilted an average of 6.4° towards 329°.
3.4.2 Relay Ramp ‘B’
Figure 3.8 shows the study site map and elevation plots of three shoreline inner
edges located along breached relay ramp ‘B’. Fault segments here are at a more advanced
stage of linkage, which is evidenced by the lower breaching index (BZ = 54). The three
shoreline inner edges mapped at ramp ‘B’ are labeled B1, B2 and B3; B1 is the lowest
topographically and B3 is the highest.
Fig. 3.6: (a) 1 m/pixel DOQQ of relay ramp ‘A’ showing the inboard, linking and outboard faults, and the shorelines that were mapped at this site. The black lines labeled A1-A4 are the mapped shoreline inner edges. (b) Elevation versus distance plots of the shoreline inner edges mapped at relay ramp ‘A’; the error is ± 2 m. Arrows indicate locations of fluvial incision into the shorelines. Values to the right of the plot are the maximum displacements (i.e., the highest elevation anywhere on the shoreline minus the lowest elevation anywhere on the shoreline). Note the dividing line between upper and lower ramp (black dashed line), the site of fault linkage (solid black line), and the contrast in shoreline deformation pattern. (c) Moving average profile of shoreline elevation. Blue box shows ± 2 m error, dashed line is the average elevation of the entire shoreline, ‘X’s show elevation anomalies (i.e., where the moving average deviates from average shoreline elevation by more than 2 m. DOQQ courtesy of U.S. Geological Survey. Also note the zone of more frequent shoreline elevation anomalies is located within 2 km on either side of the site of fault linkage.

65
Shorelines B1 and B3 each contain 2 anomalies, and shoreline B2 contains 1 anomaly
(Fig. 3.8c). There are not as many anomalies in shoreline elevation at ramp ‘B’ as there
are at ramp ‘A’. Three anomalies in shoreline elevation that occur along ramp ‘B’ appear
to be spatially coincident with one another (Fig. 3.8c), but there is no consistent up-
warping or down-
warping pattern. At least half of elevation anomalies are located within 2 km of the site
of fault linkage. None of the anomalies deviate more than 5 ± 2 m from average
shoreline elevation.
Fig. 3.7: (a) Map view of two shorelines (R1 & R2), which are present on relay ramp ‘A’. The location of the shorelines within the relay ramp is shown in Fig. 6. Numbers in white are distances in meters from zero on the x-axis in parts ‘b’ & ‘c’. (b and c) Elevation versus distance plots of shorelines R1 & R2. Shorelines are measurably tilted towards the north-northwest. Arrows in part ‘a’ show direction of greatest tilt and the amount of tilt is noted in degrees. Dashed line shows the average shoreline elevation. DOQQ courtesy of U.S.Geological Survey.

66
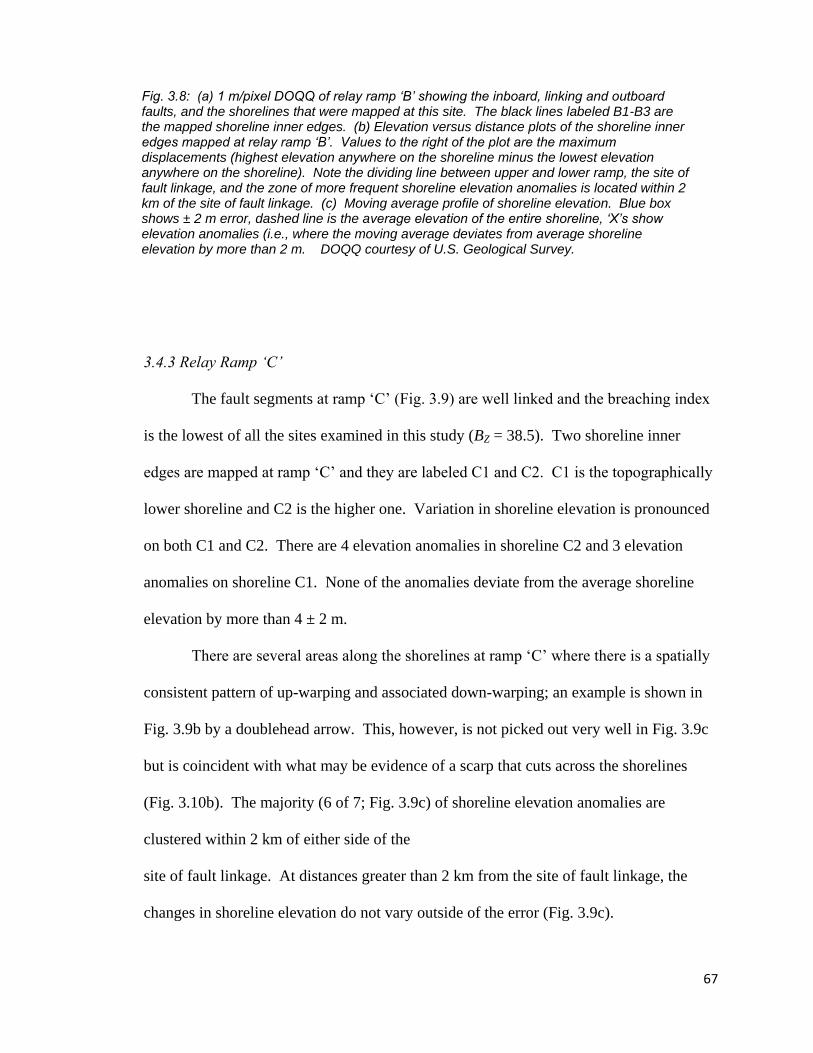
67
3.4.3 Relay Ramp ‘C’
The fault segments at ramp ‘C’ (Fig. 3.9) are well linked and the breaching index
is the lowest of all the sites examined in this study (BZ = 38.5). Two shoreline inner
edges are mapped at ramp ‘C’ and they are labeled C1 and C2. C1 is the topographically
lower shoreline and C2 is the higher one. Variation in shoreline elevation is pronounced
on both C1 and C2. There are 4 elevation anomalies in shoreline C2 and 3 elevation
anomalies on shoreline C1. None of the anomalies deviate from the average shoreline
elevation by more than 4 ± 2 m.
There are several areas along the shorelines at ramp ‘C’ where there is a spatially
consistent pattern of up-warping and associated down-warping; an example is shown in
Fig. 3.9b by a doublehead arrow. This, however, is not picked out very well in Fig. 3.9c
but is coincident with what may be evidence of a scarp that cuts across the shorelines
(Fig. 3.10b). The majority (6 of 7; Fig. 3.9c) of shoreline elevation anomalies are
clustered within 2 km of either side of the
site of fault linkage. At distances greater than 2 km from the site of fault linkage, the
changes in shoreline elevation do not vary outside of the error (Fig. 3.9c).
Fig. 3.8: (a) 1 m/pixel DOQQ of relay ramp ‘B’ showing the inboard, linking and outboard faults, and the shorelines that were mapped at this site. The black lines labeled B1-B3 are the mapped shoreline inner edges. (b) Elevation versus distance plots of the shoreline inner edges mapped at relay ramp ‘B’. Values to the right of the plot are the maximum displacements (highest elevation anywhere on the shoreline minus the lowest elevation anywhere on the shoreline). Note the dividing line between upper and lower ramp, the site of fault linkage, and the zone of more frequent shoreline elevation anomalies is located within 2 km of the site of fault linkage. (c) Moving average profile of shoreline elevation. Blue box shows ± 2 m error, dashed line is the average elevation of the entire shoreline, ‘X’s show elevation anomalies (i.e., where the moving average deviates from average shoreline elevation by more than 2 m. DOQQ courtesy of U.S. Geological Survey.

68

69
3.5 Interpretations & Discussion
Our results show that there is considerable variability in the elevation of
individual shoreline inner edges along the Catlow Valley fault. We attribute elevation
variability, outside of a 2 m error window, to slip on segments of the Catlow Valley fault
system since the shorelines formed. We do see features that we interpret to be surface
scarps (Fig. 3.10), this evidence is limited because the scarps are in close proximity to the
shorelines and have probably been degraded by hillslope processes. In addition, we
cannot discount the possibility of blind slip on portions or perhaps all of the fault
segments.
Although we interpret the majority of the deformation of individual shorelines to
be structurally controlled, we do not want to ignore other processes that may result in
variable shoreline elevation. In the following sections we discuss several issues that may
complicate our interpretations of the spatial distribution of deformation in relation to
relay ramp breaching. The focus is specifically on the shorelines and how they have been
geomorphologically modified since their formation. We will also focus on the surface
expression of the fault and how we reach the conclusion that fault slip is probably a
primary driver of shoreline elevation variability along fault strike. In order to do that,
Fig. 3.9: (a) 1 m/pixel DOQQ of relay ramp ‘C’ showing the inboard, linking and outboard faults, and the shorelines that were mapped at this site. The black lines labeled C1 & C2 are the mapped shoreline inner edges. (b) Elevation versus distance plots of the shoreline inner edges mapped at relay ramp ‘C’. Values to the right of the plot are the maximum displacement of the shorelines. Note the delineation of the upper and lower ramp (dashed black line) and the site of fault linkage (solid black line). Also note the zone of more frequent shoreline elevation anomalies is located within 2 km on either side of the site of fault linkage. (c) Moving average profile of shoreline elevation. Blue box shows ± 2 m error, dashed line is the average elevation of the entire shoreline, ‘X’s show elevation anomalies (i.e., where the moving average deviates from average shoreline elevation by more than 2 m. DOQQ courtesy of U.S. Geological Survey.

70
however, we first establish a time frame over which the deformation occurred, and within
that context discuss the implications for fault and ramp evolution.
3.5.1 Catlow Valley shoreline age and morphology
Fig. 3.10: (a & b) Google Earth views of features that cross-cut shorelines, which we have interpreted as potential scarps. (c) Small faults that breach the surface in the upper portion of relay ramp ‘A’ and small faults that splay off of the main outboard fault. Tick marks on downthrown side.

71
Although we have no direct age constraint on the shorelines in Catlow Valley, we
noted earlier that they are likely of similar age to the Alvord terraces, which have been
dated to between 11 and 20 ka (Oldow & Singleton, 2008), and not the much older 130-
200 ka Serrano terraces. Additionally, the number of shorelines present in Alvord Basin
(5) closely resembles the number of shorelines in Catlow Valley noted by previous
workers (Vander Meulen et al., 1988) and by the present study. This fact suggests that
the ultimate regression in both Paleolake Catlow and Paleolake Alvord was similar
enough to have produced nearly identical numbers of shorelines in both basins. Based on
this, we infer that the shorelines in Catlow Valley are of comparable age to those in
Alvord Basin. In addition, other nearby paleolakes share similar chronologies to Lake
Alvord, which further reinforces our inference. Paleolakes Chewaucan and Surprise were
located about 100 km west-northwest and southwest, respectively, of Catlow Valley.
Dated shorelines associated with the last lake cycle in Surprise Lake suggest the last
highstand was reached about 15 ka (Ibarra et al., 2014). Based on archeological
evidence, Surprise Lake was probably gone by about 6 ka (O’Connell & Inoway, 1994).
Shorelines ages associated with the ultimate late Pleistocene lake cycle of Lake
Chewaucan show that the lake reached highstand probably around 15 ka and entered an
overall decline thereafter (Licciardi, 2001; Negrini, 2002). Although each of these basins
experiences its own distinct hydrological response, the overall picture is that the basins
reached highstand around 10-20 ka. Following highstand the lakes regressed and likely
were gone by the early-mid Holocene. From this, we infer that the Catlow Valley
shorelines are of comparable age to other nearby lacustrine basins (i.e., they probably
formed sometime between 10 and 20 ka). Furthermore, based on this evidence we make

72
the assumption that the higher shorelines are probably older and the lower shorelines are
likely associated with the later stages of the overall late Pleistocene regression. Although
it is possible that the lake transgressed during the overall regression, this would not
greatly impact our interpretations because we are not looking at elevation between
shorelines. Instead, we are concerned with relative amounts of deformation along the
individual shorelines, as reflected by shoreline elevation anomalies along fault strike.
Where a group of shorelines show clustered anomalies suggests it is a site of localized
deformation over 103 - 10
4 years timescale.
Here we also consider whether the anomalies are an artifact of the methodology
or the result of modification by hillslope processes. First, it is difficult to attribute the
anomalies to the measurement methodology. If the observed elevation differences were a
result of the methodology the anomalies would not cluster in certain areas along the fault.
Geomorphic modification of the shoreline elevations is likely, especially with respect to
the inner edges experiencing hillslope diffusion, but we do not think it is the primary
controller of the patterns we observe. We reach this conclusion for two reasons: firstly,
the warping patterns are not randomly distributed along strike and, secondly, they are
associated with a particular structural geometry.
Another potential issue that we must address is whether the variability in
shoreline elevation is associated with lake processes. The first order control on shoreline
formation and elevation is of course associated with the volume of the lake when each
individual shoreline formed. These standstills in lake volume formed the wave cut
terraces that define the inner edges and risers. It has been shown that shoreline elevations
can be affected by lake feature parameters such as fetch, shoreline orientation, local

73
slope, and sediment supply (Reheis et al., 2014 and references therein). In the case of the
Catlow Valley study sites, all three sites are approximately west facing, the only
outcropping rock is basalt, and the fault escarpment is a few 100s m high at all three
locations. The only thing that is significantly different between sites is fetch (distance
that wind is blowing over water). Based on Fig. 3.3, fetch would have been largest over
sites ‘A’ and ‘B’, but these sites show no overwhelming difference in the height of
elevation anomalies than site ‘C’. Furthermore, if lake processes were responsible for the
elevation anomalies, the anomalies would be random, but they are not, they are clustered
with respect to the fault geometry. It is for this reason that we do not interpret the
elevation differences of the Catlow Valley shorelines to be explained primarily by this or
any other geomorphic mechanism.
3.5.2 Shoreline deformation patterns as surface expressions of the Catlow Valley fault
Although we are confident in our age inferences on the Catlow Valley shorelines,
we cannot constrain the geometry of the fault trace with respect to the shorelines. In
some cases there is evidence of where the fault trace is located based on the warping
patterns (Fig. 9), but the patterns are not laterally continuous. Therefore, any mapped
interpretation of the fault trace would be speculative. We do not make an attempt to map
the fault trace with respect to the shorelines because multiple shorelines are likely on both
the hanging wall and footwall of the fault. Additionally, because the trace is likely in
colluvium its geometry is likely complex, consisting of multiple splays that may have
slipped at different times. These complexities preclude any mapping of the trace
geometry using the shoreline deformation patterns. Nonetheless, the pattern of shoreline

74
deformation is valuable. While we cannot directly link the deformation to any single slip
event, anomalies in shoreline elevation from the average shoreline elevation are strong
indicators of slip.
Figures 4.10a & b show two locations where we have interpreted what may be
surface expressions of the fault trace. Although subdued, these features are not like
shorelines in that they are relatively short (100s of m) and appear to cross-cut one or
more shorelines. Because we do not observe cross-cutting shorelines along this
escarpment, we posit that these features may be fault scarps. This evidence, though
limited, and if correct, suggests the fault does have an expression of surface rupture since
ca. 10-20 ka. However, most evidence of surface rupture (i.e., fresh, intact scarps) has
likely been degraded or is simply difficult to observe in remote sensing data due to the
close proximity of the shorelines. One alternate possibility is that fault trace may simply
be higher on the escarpment (i.e., above the shorelines) and may not be discernable. We
cannot rule out the possibility that slip on the Catlow Valley segments has been
predominantly blind and no or relatively few surface-rupturing earthquakes have
occurred since the late Pleistocene. Blind slip could still be manifest by the warping of
the shorelines.
3.5.3 Along strike pattern of deformation: Implications for fault evolution over
geomorphic timescales
Here we discuss the along strike pattern of fault related deformation of the
Paleolake Catlow shorelines and discuss the implications for fault growth and evolution
over the geomorphic timescale. One of the most obvious features of the shoreline

75
elevation plots is that the largest number of anomalies occurs within about 2 km on either
side of the site of fault linkage at all 3 study sites. In relay ramp ‘A’ the shorelines show
significant elevation variability between 2 km and 4 km from the outboard fault tip (Fig.
3.6b & c). There are also fewer elevation anomalies in shoreline elevation from 0 to ~ 2
km along the distance axis of Fig. 3.9c. The majority of anomalies at ramp ‘B’ do not
appear clustered along strike like in ramps ‘A’ and ‘C’. One reason this may be is that
the faults that bound ramp ‘B’ are at a fairly high obliquity to one another. The obliquity
of the faults suggests that the inboard fault may have propagated toward the outboard
fault resulting in their linking. This would negate the need for initiation of an oblique
linking fault and small upper ramp faults would be unnecessary to localize a linking fault.
We argue that the reason there appears to be a 2 km length control on the
locations of anomalies is due to the fault geometry and the presence of smaller faults
within the ramp (Fig. 3.10c). Although the small faults are only observable on ramp ‘A’,
we are likely not observing faults that may have accrued blind slip. We expect that small
blind faults might also be present on ramp ‘B’ and ‘C’. The obliquity at of the faults at
ramp ‘B’, however, may preclude the development of small relay faults, which would
explain the lack of clustering of shoreline elevation anomalies. We posit that the upper
ramp is subjected to deformation mainly associated with the linking and outboard faults,
as well as any smaller faults present within the upper ramp. We can explain the observed
differences in shoreline deformation between the upper and lower ramp if we imagine
how slip is partitioned between the different structures (Fig. 3.11b & c).
If the outboard fault becomes inactive post linkage, the shorelines are expected to
passively
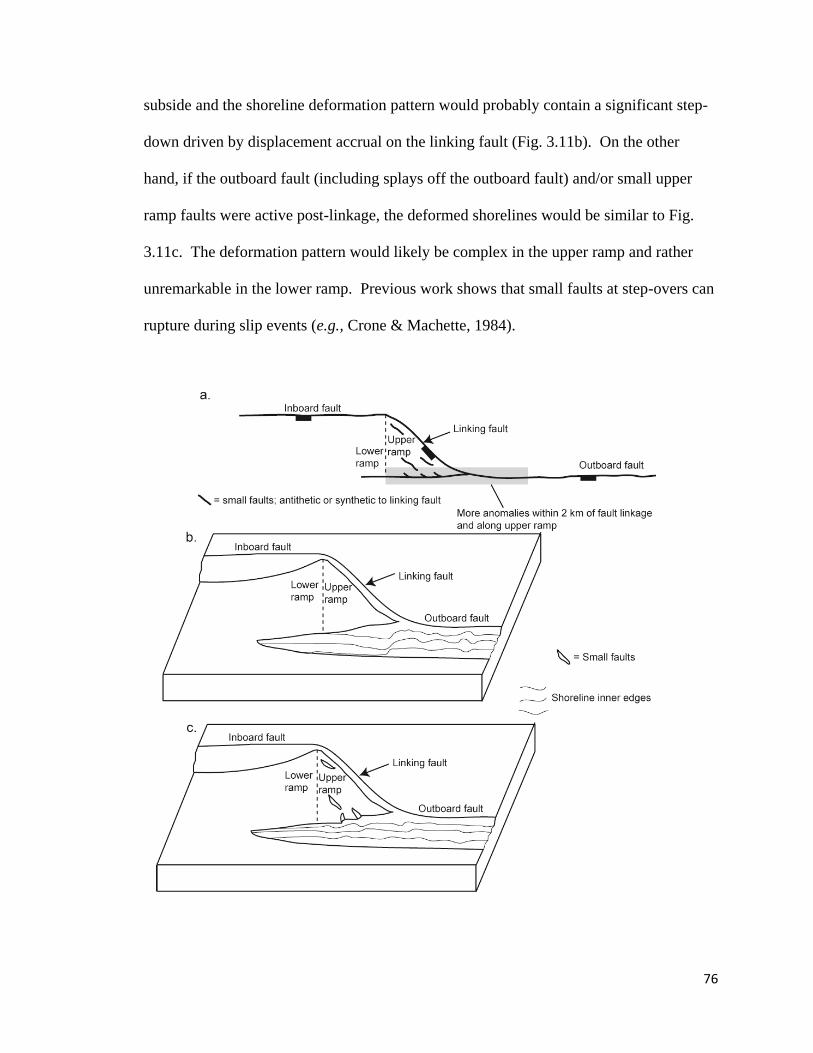
76
subside and the shoreline deformation pattern would probably contain a significant step-
down driven by displacement accrual on the linking fault (Fig. 3.11b). On the other
hand, if the outboard fault (including splays off the outboard fault) and/or small upper
ramp faults were active post-linkage, the deformed shorelines would be similar to Fig.
3.11c. The deformation pattern would likely be complex in the upper ramp and rather
unremarkable in the lower ramp. Previous work shows that small faults at step-overs can
rupture during slip events (e.g., Crone & Machette, 1984).

77
Therefore, slip on these faults, either synthetic or antithetic to the linking fault (Figs.
4.10c & 4.11) would lead to a complex pattern of shoreline warping within the upper
ramp. Because we do not observe the shorelines passively subsiding into the basin (as
illustrated in Fig. 3.11b) the most likely conclusion is that the outboard fault and/or small
ramp faults do remain active post-linkage. The linking, outboard, and smaller ramp faults
may not all slip during the same event(s). Our primary observation is that over
timescales of 103 - 10
4 years, deformation has not yet definitively localized on the linking
faults, despite the presence of well-established structures.
Our results also show that a relay ramp surface is highly dynamic and the way in
which the ramp surface deforms is complex. The deformed shorelines R1 and R2 at ramp
‘A’ indicate that the lower ramp appears to progressively tilt toward the hanging wall by
a few degrees. This degree of tilt is not unrealistic (Fossen & Rotevatn, 2016). Our
measurements of ramp tilt are located on the lower ramp and are not spatially extensive,
so we cannot say that the whole ramp surface is deforming in this manner. However, our
Fig. 3.11: (a) Schematic map view of a pair of normal faults (inboard and outboard) that are connected by a linking fault (rectangles on downthrown side) and the associated relay ramp. Small black lines are faults on the upper ramp that may be synthetic or antithetic to the linking fault. The majority of shoreline elevation anomalies are observed occur within about 2 km on either side of the site of fault linkage. (b) Block diagram of how shoreline deformation would be expected to look in the absence of activity on the outboard fault or any faults within the upper relay ramp (only the linking fault is active). Shorelines would passively subside and would be expected to contain a large step-down at the transition from the outboard-linking intersection to the inactive outboard tip (c) Block diagram of how shoreline deformation would be expected to look if the outboard fault, linking fault and small ramp faults (or any combination thereof) remained active post-linkage. Regardless of the combination, the deformation pattern suggests that slip has yet to localize on linking faults at all three study sites despite the presence of fully formed linking structures. If we consider a hypothetical earthquake, which nucleates on the outboard fault and propagates toward the relay, it may rupture the outboard segment, the linking segment, smaller faults on the ramp, or all of them. We interpret the differences in shoreline deformation patterns between the upper ramp and lower ramp, post-linkage, to be a result of earthquakes that may rupture some or all of those structures. The implication here is that following linkage, the outboard fault tip and structures within the former relay ramp itself remain active over geomorphic timescales.
78
data on the upper ramp (shoreline elevation anomalies) show that, at least over
geomorphic timescales, the ramp is not deforming coherently post-linkage.
Ultimately, we show that the geometry of the linking structure with respect to the
overlapping faults has an impact on how the ramp deforms. These observations
specifically apply to those relays that are footwall breached, which are expected to be
common based on numerical models of Crider and Pollard (1998). Furthermore, our data
add to the understanding of the progression of relay ramp deformation. Whereas we
know that the way in which a relay ramp initially deforms is dictated by how slip is
partitioned between uplift and subsidence on both faults (Ferrill & Morris, 2001), relay
ramps post-linkage had been thought to deform as passive structures, which rotate and
subside in response to slip on the now linked segments (Imber et al., 2004). Our data,
however, show that the ramps are not deforming as passive structures. Rather than
simply subsiding into the basin, the outboard fault tip and/or small faults within the upper
ramp continue to be active after fault linkage. In either case, this implies that over the
geomorphic timescale that we have examined, slip has yet to fully localize on the linking
structures, despite the presence of fully formed linking faults. Our observations indicate
that post-linkage relay ramp evolution is more complex than previously assumed.
3.6 Conclusions
In conclusion, we attribute deformation of lacustrine shorelines to slip along
segments of the Catlow Valley fault. We find that fault linkage maturity does not have a
significant effect on the vertical or horizontal distribution of deformation along breached
relay ramps. We do not observe a distinct difference in the overall pattern of deformation

79
that can be explained by a difference in maturity of the linking faults. Areas of numerous
shoreline elevation anomalies are indications that the linking, outboard, or small relay
ramp faults are likely active over the same time frame. Furthermore, our work shows that
the portion of the outboard fault that would be expected to be inactive after linkage
actually remains active for up to 104 years. This is evidenced by the presence of
anomalies in individual shoreline elevation along the outboard fault tip. Additionally,
this study shows that slip has yet to fully localize on the linking faults despite the
presence of fully formed breaching faults. Finally, these results show that relay ramps
are not passively deforming structures following fault linkage. Our work indicates that
the ramp continues to deform post-linkage, either along the portion of the outboard fault,
which previous studies had presumed to be inactive, or along small ramp faults.

80
Chapter 4
The role of fault scale, overlap and spacing in controlling extensional relay ramp
fluvial system geometry
Abstract
Differences in the geometry of fluvial systems that drain extensional relay ramps are
attributed to the scale of the ramp bounding fault segments, the spacing between
segments and the amount of overlap between segments. Previous conceptual models for
relay ramp geomorphological evolution have assumed that ramp fluvial catchments
develop on the ramp surfaces and flow parallel to fault strike into the adjacent basin.
Numerous examples exist in nature, however, that show that this is not ubiquitous. The
fundamental question of what drives this geomorphic difference has, to date, not been
fully addressed. We selected 27 relay ramps across the Basin and Range and mapped the
faults and ramp fluvial systems associated with each site. The sites represent a range of
fault scales, which we define by the total outboard fault length, and a range of spacing
and overlap values in order to better understand the structural controls on ramp fluvial
system geometry differences. Results show that outboard fault length less than about 15
km is a useful predictor for whether the majority of a relay ramp surface drains parallel to
fault strike or will traverse the outboard fault. High overlap/spacing ratios are associated
with relays along shorter (< 15 km long) outboard faults, whereas lower overlap/spacing
ratios are associated with relays along longer faults. The relationship between
overlap/spacing and fault scale suggest that lower overlap/spacing value relays may be
more common along longer outboard faults because they survive for longer periods of

81
time in the landscape. Our geomorphological observations can be used to predict synrift
depocenter locations along segmented faults, but it only appears to be applicable to short
(<15 km long) fault segments and in early rifting stages. At longer fault lengths, ramp
fluvial system geometry has no discernable relationship with from any specific structural
parameter.
4.1 Introduction
Relay ramps are structural features that occupy the area between overlapping
normal fault segments (Larsen, 1988). These features are commonly exploited by fluvial
systems that take advantage of the low points in topography and drain a part of the
footwall block. The fluvial systems, therefore, utilize the ramps as corridors for sediment
transport into the adjacent hanging wall basin (Gawthorpe & Hurst, 1993; Gupta et al.,
1999; Cowie et al., 2006; Elliot et al., 2012). The prevailing conceptual model for relay
ramp surface evolution holds that fluvial systems develop on the ramp and in the
immediate footwall, and are oriented such that flow is parallel to fault strike (i.e.,
Gawthorpe & Hurst, 1993; Fig 4.1a & b). However, there are examples of relay ramp
fluvial systems that are oriented such that the majority of the ramp area drains across the
outboard fault scarp (Fig. 4.1c). Fault-transverse fluvial systems have been previously
described by Jackson & Leeder (1994), Densmore et al. (2003) and Athmer & Luthi
(2011). The fundamental control on these different fluvial geometries, why they exist,
and what mechanisms are at play, has never been previously explored. This study
examines basic structural geometry (fault scale, fault spacing and overlap) and how they
are related to differences in fluvial system geometry.

82
Understanding the evolution of ramp surfaces and how they develop temporally
and spatially is of particular interest because of their role in governing sediment transport
in evolving continental rift basins. Predicting these synrift sediment transport pathways
and depositional patterns is useful because it is applicable to predicting various parts of
hydrocarbon systems.
In the traditional conceptual model (Gawthorpe & Hurst, 1993), a relay catchment is
geometrically controlled by the ramp adjacent faults and develops a large alluvial fan or
Fig. 4.1: Block diagrams of a relay ramp fluvial systems along an outboard fault that are: (a) shorter than 20 km and (b & c) longer than 20 km. These diagrams illustrate the hypothesized relay catchment geometries as a function of outboard fault length. These diagrams also illustrate how it is thought a fault-parallel dominated catchment may transition to a fault-transverse dominated catchment.
83
fan-delta at the toe of the ramp. Although there are examples of relay ramp-parallel
fluvial systems, it is far from a ubiquitous observation, as noted above.
The majority of previous work on relay ramp structure and evolution has focused
on controlling mechanisms of ramp orientation as a consequence of fault interaction and
linkage (e.g., Trudgill and Cartwright, 1994; Cartwright et al., 1996; Ferrill & Morris,
2001) and ramp bounding fault overlap and spacing geometry (Soliva et al., 2006; Long
& Imber, 2011; Fossen & Rotevatn, 2016). Previous studies have also sought to find the
interconnections between the structural development of rift basins through fault
interaction and linkage and synrift sedimentary architecture (Gupta et al., 1998; Dawers
& Underhill, 2000; McLeod et al., 2002; Cowie et al., 2006). What is lacking, however,
is that there has been no systematic examination of the controls on relay fluvial geometry,
in spite of the implications for rift basin stratigraphic architecture. We hypothesize that
particular structural parameters such as the outboard fault length, fault overlap and fault
spacing are the primary controls on these differences. To test this, we select a suite of
sites throughout the Basin and Range province, western North America, to evaluate
which structural parameter(s) is (are) associated with different ramp fluvial system
geometries.
4.2 Geological Setting
This study examines 27 sites located within the Basin and Range continental rift
system. The sites were chosen for a variety of reasons, the primary ones being good
exposure of the faults, intact fluvial networks on the relays, and scale of the faults.
Figure 4.2 shows the general location of each site and Appendix B (Figs. B1-B6) contains
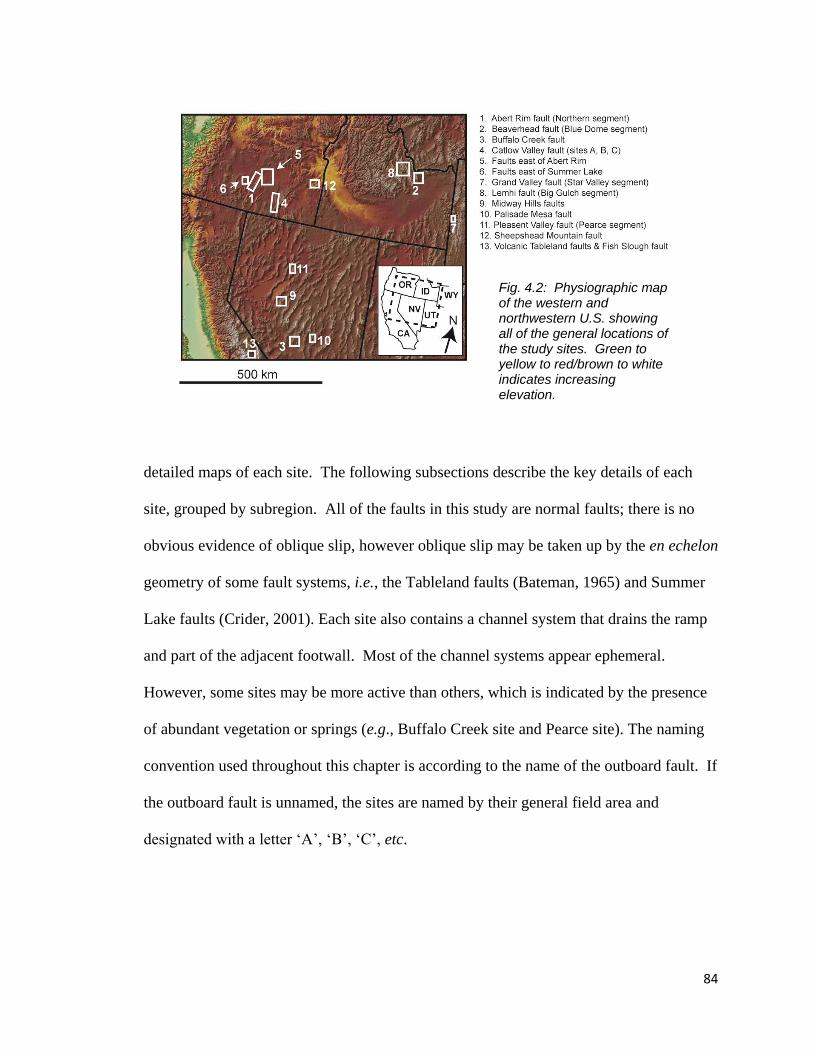
84
Fig. 4.2: Physiographic map of the western and northwestern U.S. showing all of the general locations of the study sites. Green to yellow to red/brown to white indicates increasing elevation.
detailed maps of each site. The following subsections describe the key details of each
site, grouped by subregion. All of the faults in this study are normal faults; there is no
obvious evidence of oblique slip, however oblique slip may be taken up by the en echelon
geometry of some fault systems, i.e., the Tableland faults (Bateman, 1965) and Summer
Lake faults (Crider, 2001). Each site also contains a channel system that drains the ramp
and part of the adjacent footwall. Most of the channel systems appear ephemeral.
However, some sites may be more active than others, which is indicated by the presence
of abundant vegetation or springs (e.g., Buffalo Creek site and Pearce site). The naming
convention used throughout this chapter is according to the name of the outboard fault. If
the outboard fault is unnamed, the sites are named by their general field area and
designated with a letter ‘A’, ‘B’, ‘C’, etc.

85
4.2.1 Western & Southwestern Basin & Range
4.2.1.1 Volcanic Tableland & Midway Hills
Five sites study sites are located on the Volcanic Tableland, which is located in
northern Owens Valley, California. The Tableland is the upper surface of the ~760 ka old
Bishop Tuff (Sarna-Wojcicki et al., 2000), which is a welded rhyolitic ash-flow tuff. The
surface of the Tuff is characterized by a distributed population of north-south striking
normal faults and a now inactive channel network (Gilbert, 1938; Bateman, 1965). The
channels are thought to have been active at various points in the late Pleistocene (ca 70-
300 ka - Gilpin, 2003). The ramp channels clearly formed in response to fault generated
topography (Fig. B1; Bateman 1965; Pinter & Keller, 1994). For more information on
the Volcanic Tableland, see the Geological Setting section of Chapter 2.
The Midway Hills faults (Fig. B2) are also a distributed population of north-south
striking normal faults, located in southwest Nevada just north of Tonopah. The faults
offset basalts that are of early Miocene to early Pliocene age and the faults thought to
have been active in the Quaternary (Sawyer, 1998, and references therein, Ludington et
al., 2005). The Midway Hills faults are generally short (<10 km) and tend to occur as
distributed segments or in groups of two or three, though some arrays contain more
segments. The timing of channel occupation is unknown, however it is probably not too
dissimilar from the Volcanic Tableland located <150 km to the southwest. The channels
are all locally sourced from the fault footwalls and formed in response to fault generated
topography.
4.2.1.2 Palisade Mesa fault, NV; Buffalo Creek fault, NV; Pearce fault, NV

86
The Palisade Mesa fault site is located along a north-south striking, roughly 20
km long, segmented normal fault within the southwestern Basin and Range. The fault
offsets early Oligocene to early Miocene aged rhyolite (Schell, 1981; Dohrenwend et al.,
1996; Ludington et al., 2005) and some scarps show evidence of late Pleistocene activity
(Dohrenwend et al., 1996). The Buffalo Creek fault site is located along a roughly 30 km
long segmented normal fault; Fig. B3 shows a close up aerial image of the site. The fault
offsets Tertiary to Cretaceous volcanics and plutonic rocks of the Desatoya Mountains
block (Willden & Speed, 1974; Dohrenwend et al., 1992; Lidke, 2000). There is an
extensive drainage system that is developed both in the interior of the relay ramp and
along the front of the Buffalo Creek range. The Pearce site is located along a segment of
the Pleasant Valley fault in north-central Nevada (Fig. B3). The Pearce site is located at
a step over between the Pearce and Tobin fault segments. The site is the location of the
1915 Pleasant Valley, Nevada earthquake, which ruptured portions of at least 4 segments
of the Pleasant Valley fault system (Wallace, 1984).
4.2.2 Northeastern Basin & Range
Figure B4 shows close up aerial imagery of the Grand Valley, Lemhi and
Beaverhead faults. The Star Valley site is located along a step-over of the Grand Valley
fault system. The Star Valley fault is about 40 km long. The fault shows evidence of late
Pleistocene to early Holocene activity in alluvial fans (Piety et al., 1992; McCalpin et al.,
2011).
The Big Gulch relay ramp is located along the Big Gulch and Warm Creek
segments of the Lemhi fault in eastern Idaho (Fig. B4). The Big Gulch segment is the

87
outboard fault in this relay ramp; it is the longest fault segment included in this study at
roughly 63 km long. Although previous literature names multiple segments within this
region (Crone & Haller, 1991), geometrically the segments appear to be continuous along
fault strike so they are combined for the purposes of this study. This relay ramp is also
the largest ramp in this study at over 100 km2.
The Blue Dome relay ramp is located at the southern end of the Beaverhead fault,
a segmented fault system also located in eastern Idaho. The two southern most segments
within the Beaverhead fault are the Nicholia and Blue Dome segments (Fig B4). The
Blue Dome segment forms the outboard fault of the ramp and is roughly 35 km long.
Sedimentary rocks of late Paleozoic and early Mesozoic age are exposed along the
majority of the ramp, and Quaternary rhyolite is exposed at the ramp toe (Reed et al.,
2012). The major range front segments (Blue Dome and Nicholia) show evidence of late
Quaternary activity (Skipp, 1985; Crone & Haller, 1991).
4.2.3 Northwestern Basin & Range
4.2.3.1 Summer Lake & Abert Rim
Seven sites are located within a population of northwest striking normal faults
east of Summer Lake and Abert Rim, Oregon. These faults are located at the
northwestern edge of Basin and Range extension (Crider, 2001). The two sites near
Summer Lake are located within basalt, of which the uppermost flows have been dated to
late Miocene time (6.3 ± 0.4 Ma - Diggles et al., 1990; Crider, 2001). The sites east of
Abert Rim are located within Miocene to Pliocene age rhyolites (Walker & MacLeod,
1991).

88
4.2.3.2 Sheepshead Mountain fault & Catlow Valley fault
The Sheepshead Mountain fault is a 17 km long fault (Fig. B5) and forms the
outboard fault segment of the Sheepshead Mountain relay ramp. The Sheepshead
Mountain fault offsets Miocene basalts and rhyolites that outcrop throughout the ramp
(Walker & MacLeod, 1991). Three sites are located along the Catlow Valley fault, a 65
km long segmented fault system in south-central Oregon, which displaces basalt flows
associated with the 16.6 ± 0.02 Ma old Steens basalt (Hooper et al., 2002) (Fig. B6).
Quaternary activity on the Sheepshead Mountain fault is suggested from air photo
reconnaissance but this evidence is limited (Personius et al., 2002). No definitive
evidence of Quaternary activity can be definitely shown on the Catlow Valley segments
because of paleolacustrine shoreline deposits along the escarpment; however it is
suggested on at least one segment and late Pleistocene lacustrine shorelines deviate
significantly from horizontal (Chapter 3; Hopkins & Dawers, 2016).
4.3 Methods
In order to understand how outboard fault length affects ramp fluvial system
geometry, we first define objective criteria to measure specific features. Below, each
metric is defined and how each one was measured is discussed. For this study,
measurements were made using either a handheld GPS device or were made remotely
using a 10 m digital elevation model (DEM) and 1 m digital orthophoto quarter
quadrangles (DOQQs). All feature measurement and data visualization was done in
ArcGIS version 10.0. Five parameters are measured at each site: outboard fault length,

89
the area of the ramp that drains in a direction parallel to fault strike (AFP), the total relay
ramp area (AR), fault spacing and fault overlap (Fig. 4.3). The outboard fault length is
defined as the length of the outboard fault of a relay ramp as measured from one fault tip
to the other. Fault overlap is measured along the center of the relay ramp and spacing is
distance between the faults as measured at the center of the overlap line (Fig. 4.3a & b).
The majority of measurements of outboard fault length, AFP and AR are made via
remote sensing mapping using DOQQs and a 10 m DEM. Measurements made in the
field are denoted in Table 4.1. However, one issue that greatly affects measurements of
OFL and AR is the location of the fault tips. A fault tip is defined as the point along a
fault where displacement becomes zero. However, displacement may not be zero at the
tip of a remotely imaged scarp as seen in both visible imagery or elevation data. These
problems introduce an unknown error in our measurements of fault length and ramp area
because we do not know how much of the visible scarp (in the DOQQ or DEM)
represents true fault length. By default, this also introduces an error in the overlap
measurements. We can constrain some of this uncertainty by including GPS located fault
tips and examining the differences between faults tips mapped in imagery (DOQQ) alone
and those located using GPS. The GPS device is a handheld Trimble GeoXM 2008
Series, which is capable of 1-3 m vertical and horizontal accuracy. Fault tips were
mapped using the handheld GPS by walking along the footwall of the fault until the
displacement between footwall and hanging wall was no longer visible in the field. A
total of 19 fault tips were located using GPS. In the majority of cases (14 of 19), the fault
length is under measured, in other words the visible scarp in the DOQQ is shorter than
the true fault length.
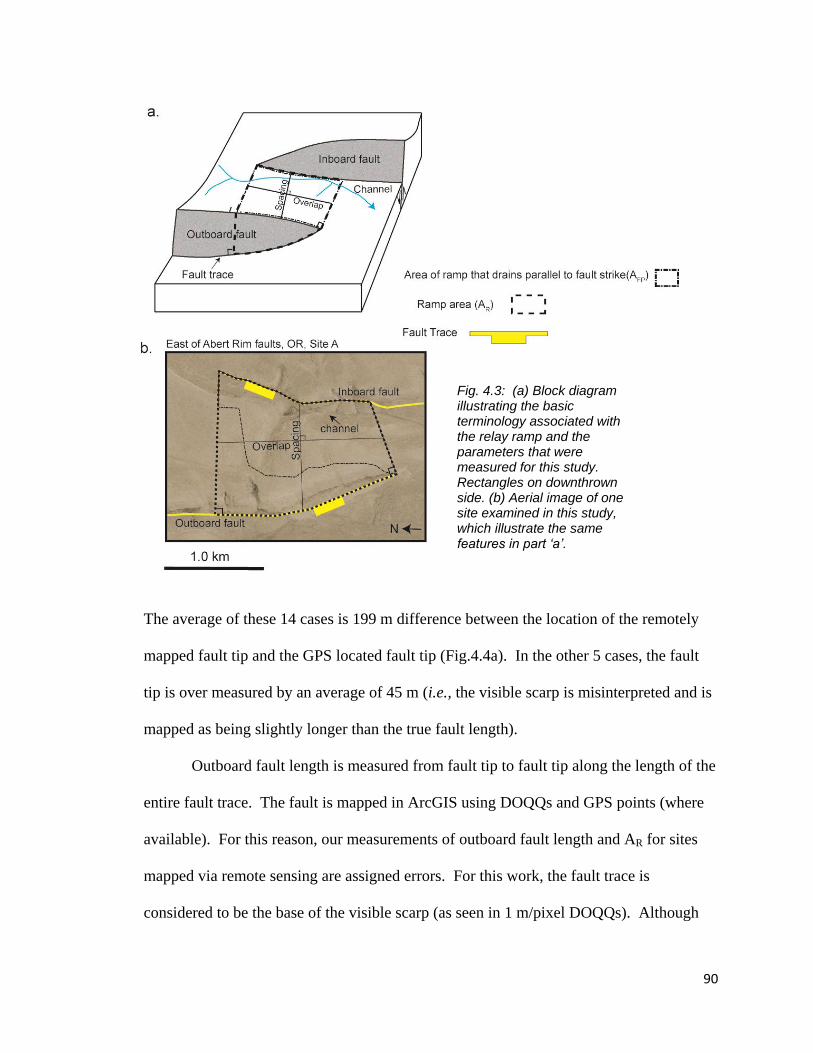
90
The average of these 14 cases is 199 m difference between the location of the remotely
mapped fault tip and the GPS located fault tip (Fig.4.4a). In the other 5 cases, the fault
tip is over measured by an average of 45 m (i.e., the visible scarp is misinterpreted and is
mapped as being slightly longer than the true fault length).
Outboard fault length is measured from fault tip to fault tip along the length of the
entire fault trace. The fault is mapped in ArcGIS using DOQQs and GPS points (where
available). For this reason, our measurements of outboard fault length and AR for sites
mapped via remote sensing are assigned errors. For this work, the fault trace is
considered to be the base of the visible scarp (as seen in 1 m/pixel DOQQs). Although
Fig. 4.3: (a) Block diagram illustrating the basic terminology associated with the relay ramp and the parameters that were measured for this study. Rectangles on downthrown side. (b) Aerial image of one site examined in this study, which illustrate the same features in part ‘a’.

91
this may not be representative of the true fault trace in all cases, it is a consistent means
of mapping the fault along its entire length. Note that the uncertainty in outboard fault
length is only applied where the fault tip is located using DOQQs. In the cases where the
fault tip(s) was located with GPS, no error in length is applied because it is negligible at
the scale shown in the data plots. The maximum uncertainty in fault length for any fault
is, therefore, + 0.398 km (199 m times 2) and – 0.09 km (45 m times 2).
AR is the total area of a relay ramp. AR is measured as the area of a polygon made
up of two lines extending perpendicular from the outboard fault to the inboard fault,
which are then connected to two lines drawn along the fault traces of the inboard and
outboard faults (Fig. 4.3a). The polygon is drawn using DOQQs and the area is measured
in ArcGIS. An example of a ramp area polygon (dashed line) is shown in Figure 4.3b.
Appendix B contains all the mapped relay ramp area polygons used in this study.
Once AR is measured, an uncertainty in the area is applied based on the uncertainty in the
fault tip location. Figure 4.4b shows a schematic illustration of how the uncertainty in
ramp area is derived. Based on the possible over and under estimates of fault tip
locations, we apply a positive and negative ramp area error to the measured areas (Table
4.1). The values of the positive and negative ramp area uncertainties are related to the
average values of under and over measurement of fault tip locations (Fig. 4.4b).
AFP is the area of a polygon that represents the area of the ramp that drains
parallel to fault strike and discharges at the ramp toe (Fig. 4.3a). AFP polygons are
manually mapped in ArcGIS with the aid of a 10 m contour map generated from the
DEM, the DOQQ imagery and ArcGIS’s hydrology tools.
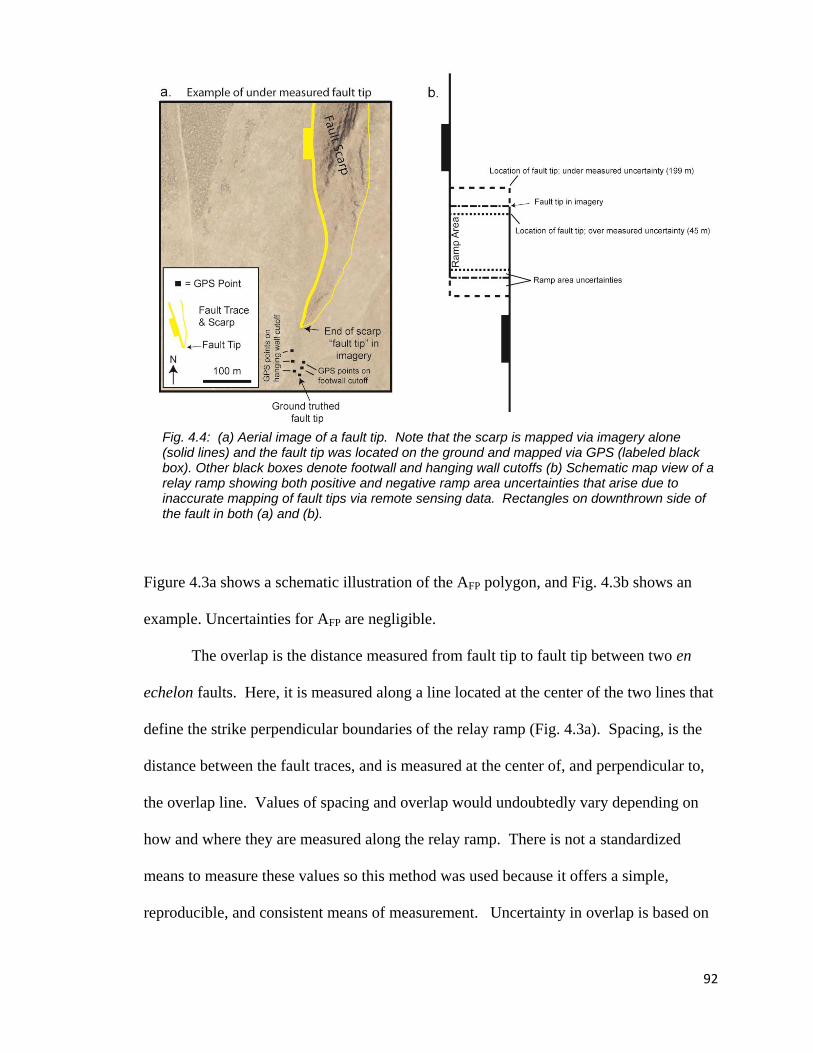
92
Figure 4.3a shows a schematic illustration of the AFP polygon, and Fig. 4.3b shows an
example. Uncertainties for AFP are negligible.
The overlap is the distance measured from fault tip to fault tip between two en
echelon faults. Here, it is measured along a line located at the center of the two lines that
define the strike perpendicular boundaries of the relay ramp (Fig. 4.3a). Spacing, is the
distance between the fault traces, and is measured at the center of, and perpendicular to,
the overlap line. Values of spacing and overlap would undoubtedly vary depending on
how and where they are measured along the relay ramp. There is not a standardized
means to measure these values so this method was used because it offers a simple,
reproducible, and consistent means of measurement. Uncertainty in overlap is based on
Fig. 4.4: (a) Aerial image of a fault tip. Note that the scarp is mapped via imagery alone (solid lines) and the fault tip was located on the ground and mapped via GPS (labeled black box). Other black boxes denote footwall and hanging wall cutoffs (b) Schematic map view of a relay ramp showing both positive and negative ramp area uncertainties that arise due to inaccurate mapping of fault tips via remote sensing data. Rectangles on downthrown side of the fault in both (a) and (b).

93
the uncertainties in fault tip location (Fig. 4.4). Uncertainty is for spacing is considered
negligible because it is measured from fault trace to fault trace, which is taken to be the
base of the visible scarps. Because these are easily located in imagery, uncertainty is not
significant.
Uncertainties for features mapped remotely were measured or calculated using
errors from other features. The error in overlap is taken as +0.397 or -0.0896 km. Note
that this is double the average uncertainty in fault tip under or over measurement because
relay overlap depends on the location of the fault tip. AR error is directly measured by
constructing two polygons, the width of which is equal to fault spacing and the lengths of
which are equal to the positive and negative uncertainty in overlap. AFP error is measured
by constructing two polygons in which the width is equal to fault spacing and the length
is the positive or negative overlap. To actually get AFP error, though, the area of the two
polygons is multiplied by the proportion of the ramp area that drains parallel to fault
strike. This ensures that the error in AFP is, in general, reflective of the proportion of the
ramp that drains parallel to fault strike. Positive and negative uncertainties in AFP/AR are
calculated by propagating the errors in AR and AFP using the following equation.
δA𝐶 = 𝐴𝐶√(𝛿𝐴𝑅
𝐴𝑅)2 + (
𝛿𝐴𝐹𝑃
𝐴𝐹𝑃)2
AFP = area of relay ramp that drains parallel to fault strike
AR = Area of the relay ramp
δAR = uncertainty in relay ramp area
δAFP = uncertainty in area of relay ramp that drains parallel to fault strike

94
Uncertainty in O/S is calculated by the following equation.
δ O/S = O/S√(𝛿𝑂
𝑂)2 + (
𝛿𝑆
𝑆)2
O = overlap
δO = uncertainty in overlap (+0.397 or -0.0896 km)
S = spacing
δS = uncertainty in spacing (here is set to zero)
Sites with variables that have negligible uncertainties are sites that were mapped wholly
or partially by GPS (denoted by * or **), or the uncertainty is assumed to be negligible
(as is the case with S measurements).
4.4 Results
4.4.1 Relationships between outboard fault length, overlap, spacing and AFP/AR
Table 4.1and Figs. 4.5-4.8 show the results of this work. Table 4.1 shows values
for all variables measured and the associated uncertainties for all measurements. Note
that uncertainties in Table 4.1 are either measurement error (as is the case for outboard
fault length) or errors that are computed using measurement errors of other variables.
The sites chosen for this study represent a spectrum of potential configurations of relay
ramps. Figure 4.5 shows histograms that show the number of faults or sites with a given
outboard fault length, fault spacing and fault overlap. Although half of the dataset
consists of sites that are small in terms of the outboard fault length, fault spacing and
fault overlap, this is not unexpected given the probability of encountering relatively small
faults versus larger faults (Bonnet et al., 2001).

95
The sites chosen for this study are a representative sample of relay ramp
geometries. To test this we compare the geometry of these sites to previous work.
Previous work on fault spacing and overlap (Soliva et al., 2006; Long & Imber 2011;
Fossen & Rotevatn, 2016) demonstrates a self-similar pattern (Fig. 4.6) over 8 orders of
magnitude with 2 orders of magnitude of scatter. The spacing and overlap relationship
for the sites studied here are within the observed scatter and fall along the same general
trend as previous work. Although sites were selected based on outboard fault length and
the presence of a relay catchment, they were not selected based on specific fault
geometries. In other words, the results of Fig. 4.6 serve as a check in that it demonstrates
that our sites are not exceptional relay ramp geometries and that they are a representative
sample across a range of outboard fault lengths. This fact gives us confidence that
observations within the data are not artificial or the result of particular fault geometries
that are preferentially favorable to the development of ramp catchments. This gives us
further confidence that any anomalies in ramp catchment geometry are due to structural
differences between sites.
The primary question this work aims to address is whether or not outboard fault
scale (reflected by its length – outboard fault length) is related to particular relay
catchment geometries. A convenient way of understanding ramp catchment geometry is
to use the ratio of fault-parallel flowing drainage area (AFP) to ramp area (AR). Figure 4.7
shows that outboard fault length of less than about 15 km are associated with AFP/AR
values generally higher than 0.5. This means that a majority of the ramp area is drained
by catchments that are fault-parallel in every case where the outboard fault is less than 15
km long. Outboard fault lengths longer than about 15 km, however, are associated with

96
AFP/AR values that range from near zero to about 0.8. Although there are significant
uncertainties with some sites, the key observation here is the apparent shift in
predictability of AFP/AR when outboard fault length increases above ~ 20 km.
Although sites were not selected based on specific relay geometries, there is a significant
disparity in the overlap/spacing ratio as the outboard fault gets larger. Figure 4.8 shows
that the overlap/spacing ratio of relay ramps with outboard faults less than about 15 km in
length are largely variable from less than 1 to nearly 5. For outboard faults that are
greater than 15 km, the overlap/spacing value for the relay ramps is less than 2 (Fig. 4.8).
Previous work shows that a global average overlap/spacing value (also referred to as
relay aspect ratio in other work) is 4.2 (Long & Imber, 2011). The average
overlap/spacing value for this study is 1.8 (Table 4.1). However, when faults longer than
15 km are excluded this average increases to 2.1. Figure 4.8 shows that at an outboard
fault length of 15 km or more, the relay ramps tend to be squarer in shape, whereas at
smaller outboard fault lengths, overlap/spacing ratio is unpredictable.

97
Fig. 4.5: (a) Histogram of outboard fault lengths versus number of faults, (b) histogram of fault spacing versus number of sites,(c) histogram of fault overlap versus number of sites.

98
Ta
ble
4.1
: T
ab
le o
f fa
ult, ca
tch
me
nt, a
nd
re
lay p
ara
me
ter
me
asu
rem
en
ts a
nd
err
ors
fo
r th
e 2
7 s
tudy s
ites. *
de
no
tes o
utb
oa
rd fa
ult le
ng
th
me
asu
red
usin
g 1
GP
S lo
ca
ted
fa
ult tip
. *
* d
en
ote
s o
utb
oa
rd fa
ult le
ng
th m
ea
sure
d u
sin
g b
oth
GP
S lo
ca
ted fa
ult tip
s. F
or
all
aste
risked
site
s r
ela
y a
rea
s a
re c
alc
ula
ted
usin
g G
PS
lo
ca
ted
fau
lt tip
s.
Lo
cati
on
Sit
e N
am
eO
utb
oard
fau
lt le
ng
th (
km
)R
am
p a
rea (
AR)
(km
2)
Fau
lt-p
ara
lle
l d
rain
ed
are
a (
AF
P)
(km
2)
AF
P/A
RO
ve
rlap
(O
) (k
m)
Sp
acin
g (
S)
(km
)O
ve
rlap
/Sp
acin
g
CA
Table
land f
aults
Site
A1.5
+0.1
99 -
0.0
45
0.2
30.1
90
.83
1.0
10.2
14.8
CA
Table
land f
aults
Site
B2.1
+0.1
99 -
0.0
45
0.1
70.1
10
.67
0.6
30.3
12.0
CA
Table
land f
aults
Site
C1.5
0.2
80.1
90
.68
1.0
60.2
64.2
CA
Table
land f
aults
Site
D2.1
+0.1
99 -
0.0
45
0.1
10.1
00
.88
0.3
90.2
71.5
CA
Fis
h S
lough f
ault
13 +
0.3
97 -
0.0
89
1.3
8 +
0.2
85 -
0.0
63
1.0
5 +
0.2
16 -
0.0
47
0.7
6 +
0.2
20
-0.0
49
1.8
14 +
0.3
97 -
0.0
89
0.8
42.2
+0.4
74 -
0.1
07
IDB
eaverh
ead f
ault
(Blu
e D
om
e s
egm
ent)
35.1
+0.3
97 -
0.0
89
65.7
+11.5
49 -
0.0
15
27.2
7 +
4.7
35 -
0.0
06
0.4
1 +
0.1
-0.0
00
110.8
99 +
0.3
97 -
0.0
89
6.3
11.7
+0.3
67 -
0.0
83
IDLem
hi f
ault
(Big
Gulc
h s
egm
ent)
63.3
+0.3
97 -
0.0
89
247 +
17.9
96 -
0.5
49
79.5
8 +
5.7
50 -
0.1
75
0.3
2 +
0.0
33
-0.0
01
13.7
61 +
0.3
97 -
0.0
89
13.7
81.0
+0.6
58 -
0.1
49
NV
Mid
way H
ills f
aults
Site
A4.8
+0.3
97 -
0.0
89
0.1
7 +
0.1
31 -
0.0
50
0.0
73 +
0.0
57 -
0.0
21
0.4
3 +
0.4
80
-0.1
85
0.6
11 +
0.3
97 -
0.0
89
0.4
51.4
+0.4
99 -
0.1
13
NV
Mid
way H
ills f
aults
Site
B3.6
+0.3
97 -
0.0
89
0.2
67 +
0.0
15 -
0.0
35
0.1
71 +
0.1
00 -
0.0
22
0.6
4 +
0.5
31
-0.1
20
0.4
240 +
0.3
97 -
0.0
89
0.4
01.0
6 +
0.3
03 -
0.0
68
NV
Mid
way H
ills f
aults
Site
C6.6
+0.3
97 -
0.0
89
0.4
77 +
0.2
15 -
0.0
51
0.2
69 +
0.1
21 -
0.0
28
0.5
6 +
0.3
59
-0.0
88
0.6
1 +
0.3
97 -
0.0
89
0.7
50.9
+0.0
63 -
0.0
14
NV
Mid
way H
ills f
aults
Site
D3.9
+0.3
97 -
0.0
89
0.7
08 +
0.2
83 -
0.0
94
0.4
72 +
0.1
87 -
0.0
62
0.6
6 +
0.3
71
-0.1
23
0.8
27 +
0.3
97 -
0.0
89
0.8
31.0
+0.0
68 -
0.0
15
NV
Ple
asant V
alle
y f
ault
(Pearc
e s
egm
ent)
29.7
+0.3
97 -
0.0
89
24.2
3 +
2.2
58-0
.820
0.2
1 +
0.0
22 -
0.0
07
0.0
1 +
0.0
01
-0.0
00
44.8
62 +
0.3
97 -
0.0
89
5.3
50.9
+0.6
84 -
0.1
54
NV
Buff
alo
Cre
ek
fault
36.1
+0.3
97 -
0.0
89
111.3
8 +
10.6
87 -
1.3
371.3
3 +
6.9
56 -
0.8
52
0.6
4 +
0.0
87
-0.0
10
7.4
46 +
0.3
97 -
0.0
89
15.0
00.5
+0.8
88 -
0.2
00
NV
Palis
ade M
esa f
ault
9.5
+0.3
97 -
0.0
89
0.2
5 +
0.2
11 -
0.6
66
0.1
95 +
0.1
60 -
0.0
50
0.7
8 +
0.8
87
-0.2
79
0.4
43 +
0.3
97 -
0.0
89
0.5
80.8
+0.9
93 -
0.2
24
OR
Catlo
w V
alle
y f
ault
Site
A20.7
+0.3
97 -
0.0
89
2.0
5 +
0.4
71 -
0.2
01
1.5
00 +
0.3
44 -
0.1
47
0.7
3 +
0.2
35
-0.1
00
1.5
35 +
0.3
97 -
0.0
89
1.3
91.1
+0.5
32 -
0.1
20
OR
Catlo
w V
alle
y f
ault
Site
B7.7
+0.3
97 -
0.0
89
0.2
31 +
0.3
28 -
0.0
84
0.1
86 +
0.2
64 -
0.6
80
.80
+1
.61
0 -0
.41
60.2
82 +0.3
97 -
0.0
89
0.8
20.3
+0.4
77 -
0.1
08
OR
Catlo
w V
alle
y f
ault
Site
C22.4
+0.3
97 -
0.0
89
0.9
19 +
0.4
93-0
.091
0.1
48 +
0.0
78 -
0.0
146
0.1
6 +
0.1
20
-0.0
22
1.0
08 +
0.3
97 -
0.0
89
0.9
11.1
+0.2
85 -
0.0
64
OR
Faults
east of
Abert
Rim
Site
A6.2
+0.3
97 -
0.0
89
1.8
6 +
0.3
92 -
0.1
18
1.0
8 +
0.2
27 -
0.0
68
0.5
8 +
0.1
72
-0.0
51
1.6
62 +
0.3
97 -
0.0
89
1.0
81.5
+0.4
85 -
0.1
09
OR
Faults
east of
Abert
Rim
Site
B5.3
+0.3
97 -
0.0
89
1.3
3 +
0.2
51 -
0.0
58
0.9
33 +
0.1
76 -
0.0
41
0.7
0 +
0.1
87
-0.0
43
2.2
35 +
0.3
97 -
0.0
89
0.6
03.7
+0.4
36 -
0.0
98
OR
Faults
east of
Abert
Rim
Site
C13.2
+0.3
97 -
0.0
89
0.9
19 +
0.2
59 -
0.0
70
0.7
68 +
0.2
16 -
0.0
59
0.8
3 +
0.3
30
-0.0
50
1.2
67 +
0.3
97 -
0.0
89
0.8
01.6
+0.0
74 -
0.0
17
OR
Faults
east of
Abert
Rim
Site
D7.2
+0.3
97 -
0.0
89
5.6
3 +
0.3
64 -
0.2
69
3.5
10 +
0.2
25 -
0.1
66
0.6
2 +
0.3
68
-0.0
26
4.1
73 +
0.3
97 -
0.0
89
1.3
13.2
+0.0
26 -
0.0
06
OR
Faults
east of
Abert
Rim
Site
E6.1
+0.1
99 -
0.0
45
3.9
11.6
80
.43
3.2
91.4
42.3
OR
Faults
east of
Sum
mer
Lake
Site
A3.6
+0.1
99 -
0.0
45
0.7
10.5
50
.77
1.3
80.5
22.7
OR
Faults
east of
Sum
mer
Lake
Site
B7.9
+0.1
99 -
0.0
45
2.6
51.5
30
.57
2.6
91.0
92.5
OR
Abert
Rim
fault
47.7
+0.1
99 -
0.0
45
6.5
75.5
80
.85
2.9
62.2
21.3
OR
Sheepshead M
ounta
in f
ault
17.5
+0.1
99 -
0.0
45
37.6
420.2
10
.54
8.2
14.6
91.7
WY
Gra
nd V
alle
y f
ault
(Sta
r V
alle
y s
egm
ent)
38.9
+0.3
97 -
0.0
89
30.8
1 +
1.0
06 -
1.2
70
9.6
8 +
0.3
1 -
0.3
93
0.3
1 +
0.0
14
-0.0
17
5.4
99 +0.3
97 -
0.0
89
5.8
20.9
+0.0
29 -
0.0
07
Ave
rag
e15.5
20.3
8.5
0.6
32.5
1.8
Me
dia
n7.7
1.3
0.7
0.6
1.5
0.8
1.5
Sta
nd
ard
De
via
tio
n16.2
51.8
20.4
0.2
3.4
3.9
1.1
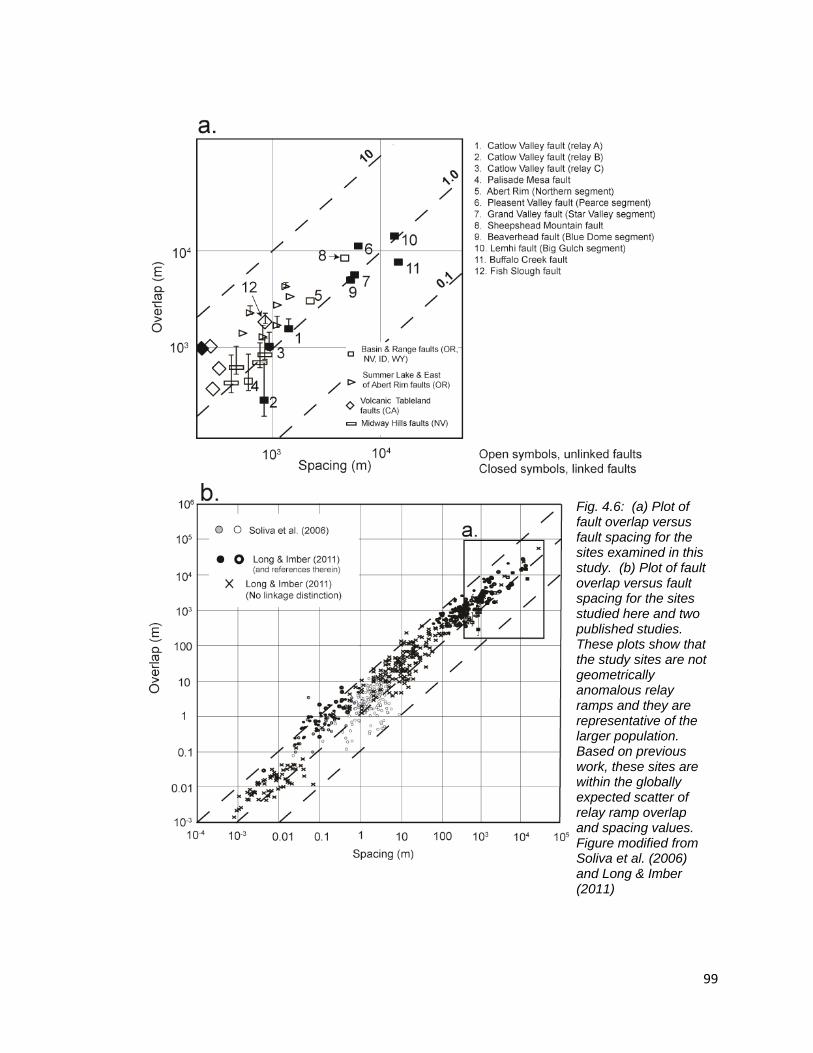
99
Fig. 4.6: (a) Plot of fault overlap versus fault spacing for the sites examined in this study. (b) Plot of fault overlap versus fault spacing for the sites studied here and two published studies. These plots show that the study sites are not geometrically anomalous relay ramps and they are representative of the larger population. Based on previous work, these sites are within the globally expected scatter of relay ramp overlap and spacing values. Figure modified from Soliva et al. (2006) and Long & Imber (2011)

100
4.5 Discussion
Fig. 4.7: Plot of outboard fault length versus relay ramp catchment area/relay ramp area (AFP/AR). High AFP/AR values indicate that a majority of the relay ramp area drains fault-parallel. Note that there appears to be a transition around 20 km which shows that fault-parallel catchments are dominant when outboard faults are less than 20 km. There is no relationship between catchment geometry and outboard fault length for sites along fault longer than about 20 km. Errors in AFP/AR
are the result of error propagation from fault length measurements.
Fig. 4.8: Plot of outboard fault length versus fault overlap/fault spacing. Results show that for outboard fault lengths of more than about 15 km, overlap/spacing ratio is less than 2. Values of overlap/spacing are unpredictable for outboard fault lengths less than 15 km. These results indicate that narrow relay ramps (overlap/spacing ratio > 2) do not tend to be present in the landscape along outboard faults. This data is interpreted to mean that narrower relays tend to breach more rapidly and therefore do not survive along larger, mature fault systems.
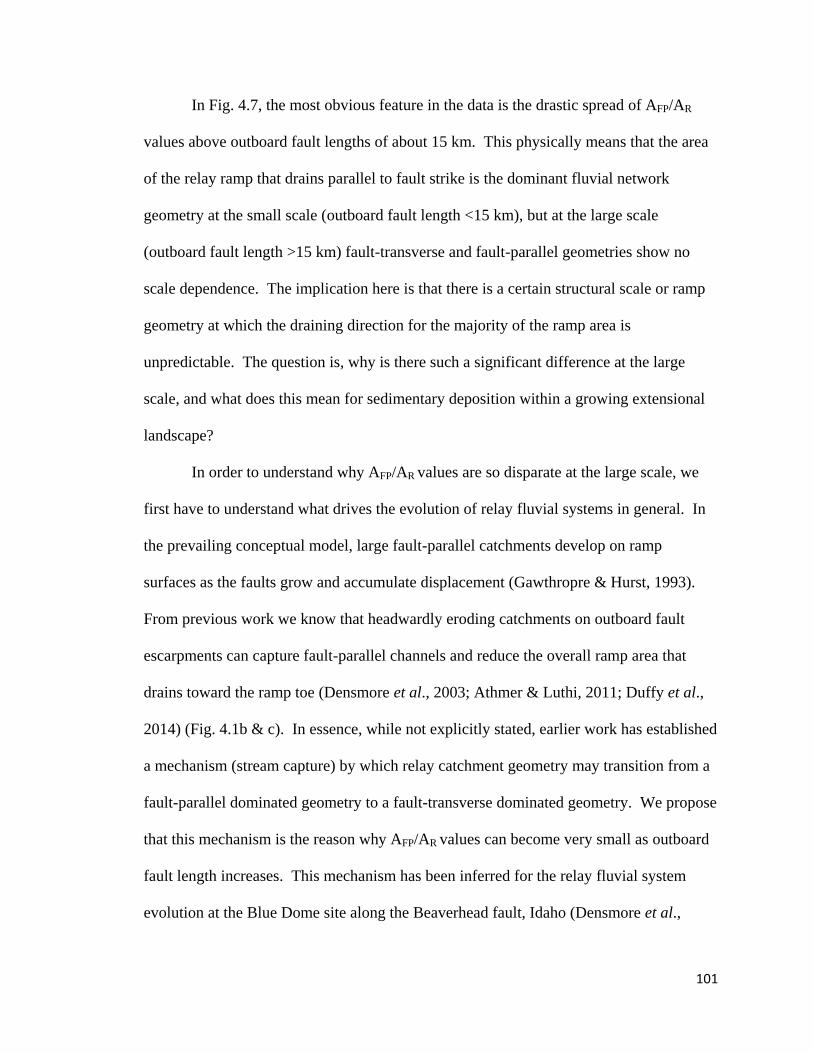
101
In Fig. 4.7, the most obvious feature in the data is the drastic spread of AFP/AR
values above outboard fault lengths of about 15 km. This physically means that the area
of the relay ramp that drains parallel to fault strike is the dominant fluvial network
geometry at the small scale (outboard fault length <15 km), but at the large scale
(outboard fault length >15 km) fault-transverse and fault-parallel geometries show no
scale dependence. The implication here is that there is a certain structural scale or ramp
geometry at which the draining direction for the majority of the ramp area is
unpredictable. The question is, why is there such a significant difference at the large
scale, and what does this mean for sedimentary deposition within a growing extensional
landscape?
In order to understand why AFP/AR values are so disparate at the large scale, we
first have to understand what drives the evolution of relay fluvial systems in general. In
the prevailing conceptual model, large fault-parallel catchments develop on ramp
surfaces as the faults grow and accumulate displacement (Gawthropre & Hurst, 1993).
From previous work we know that headwardly eroding catchments on outboard fault
escarpments can capture fault-parallel channels and reduce the overall ramp area that
drains toward the ramp toe (Densmore et al., 2003; Athmer & Luthi, 2011; Duffy et al.,
2014) (Fig. 4.1b & c). In essence, while not explicitly stated, earlier work has established
a mechanism (stream capture) by which relay catchment geometry may transition from a
fault-parallel dominated geometry to a fault-transverse dominated geometry. We propose
that this mechanism is the reason why AFP/AR values can become very small as outboard
fault length increases. This mechanism has been inferred for the relay fluvial system
evolution at the Blue Dome site along the Beaverhead fault, Idaho (Densmore et al.,

102
2003). The rationale is that as a given outboard fault grows in length and begins to
interact with its inboard neighbor, its displacement and displacement rate increase, which
in turn increases fluvial incision rates on the escarpment catchments. This makes capture
of the fault-parallel draining channels more likely at the larger scale (Fig. 4.1c), which
would explain the disparity in AFP/AR values. The fundamental control on whether a
scarp catchment will capture a fault-parallel channel, therefore, is the ability of the fault-
parallel channel to incise at the same rate or faster than the escarpment catchments.
Additionally, an important consideration may be the incision rate of the scarp catchments
relative to the rock uplift rate on the outboard fault. This would set the divide migration
rate on the scarp catchments and dictate if capture of a portion of AFP will occur.
Although stream capture of a fault-parallel catchment by a scarp catchment is the
mechanism by which we interpret our data, it is not the only possible mechanism.
Figures 4.9 and 4.10 show possible mechanisms by which ramp-transverse catchments
could evolve. Rather than a relay ramp catchment evolving as a fault-parallel geometry
and then transitioning to fault-transverse at a later time (as described in Fig. 4.9a & 4.10a,
Davis, 2005) for some sites the fault-transverse geometry may be the initial condition
(Fig. 4.9b & 4.10b). This is the interpreted mechanism by which relay ramp fluvial
systems evolved at the Pleasant Valley fault site (Jackson & Leeder, 1994), but it has not
been definitely shown. Regardless, our observations are still significant because they
predict which types of structural geometries would favor fault-transverse versus fault-
parallel fluvial geometries. A third possible way for fault-parallel cases to transition to a
fault-transverse geometry is shown in Fig. 4.9c & 4.10c. In this scenario, the fault-
parallel drained area has an outlet at the ramp toe, but at some point the fault tip

103
propagates passed the channel and it does not get redirected. The third scenario is the
least likely because en echelon faults do not typically propagate past one another very
much after fault initiation due to stress shadowing (Cowie, 1998; Gupta & Scholz, 2000;
Hus et al., 2005).
Fig. 4.9: Schematic map views of different scenarios in which a fault-transverse drainage may evolve. In case (a) an initially fault-parallel drainage is captured by a headwardly eroding scarp-front catchment and diverts a significant portion of the fault-parallel drained area over the outboard fault. In case (b) a fault-parallel drainage area never develops and scarp front catchments simply get larger and eventually drain the entirety of the relay ramp. In case (c) an initial fault-parallel drainage area becomes a fault-transverse drainage because the outboard fault propagates past the channel. In this case, the channel maintains flow across the fault and does not get deflected. Case (a) or case (b) seem to be likely mechanisms, however case (c), while theoretically possible, is unlikely. This unlikelihood is due to the fact that once faults attain an overlapping geometry propagation is generally arrested due to stress shadowing (Cowie, 1998).

104
Regardless of the structural and geomorphic mechanisms (capture vs. tip propagation)
responsible for channel geometry genesis or reorganization, we limit our scope to the
simple observation of over what fault scale(s) does this geomorphological transition
occur.
Future work is needed to discern which of these mechanisms is preferred or
encouraged under different scenarios (i.e., variable climate, rock type, structural
geometries, etc.). The most straightforward way to approach this is to utilize
geomorphological indicators to infer which mechanism is at work in a given scenario.
Recently, some workers have focused on the χ metric, which characterizes both the
topology and geometry of a channel network (Willett et al., 2014) and gives a measure of
the disequilibrium between adjacent watersheds. This is useful because differences in χ
Fig. 4.10: Google Earth images of three relay ramps that are interpreted to be analogous to scenarios outlined in Fig. 4.9.

105
between channel networks indicate that the drainage divide is not stable and one
watershed is in the process of capturing another. A detailed χ analysis of the sites
examined here could be useful in figuring out whether a site is one case or another (Fig.
4.9). In addition to χ, additional geomorphic indicators can be utilized to determine
which of the three mechanisms in Figs. 4.9 and 4.10 are responsible for the observed
relay channel geometry. One could examine channel profile convexities to determine if
capture has occurred (e.g., Davis, 2005). Additionally, one could examine the landscape
itself and look for evidence of abandoned/redirected channels (wind gaps) or other
features indicative of channel network reorganization. Whatever feature or metric is
utilized, they should be used in conjunction with one another to anchor any interpretation.
4.5.1 Overlap, spacing, outboard fault length and their relationship with relay ramp
shape
Recent work on relay ramp overlap and spacing relationships along en echelon
normal faults shows that the overall self-similarity of relay ramp fault overlap/spacing
ratio is demonstrable over 7-8 orders of magnitude with about 2 orders of magnitude
scatter (Soliva et al., 2006; Long & Imber, 2011; Childs et al., 2014; Fossen & Rotevatn,
2016). Indeed, our data fall within the predicted 2 orders of magnitude of scatter that is
seen in above-mentioned studies (Fig. 4.5). These studies also show that, globally, the
ratio of overlap to spacing for normal faults is somewhere between 2 and 5. Our goal
here is not to repeat previous work; rather it is important to note what previous work
omitted. One issue that cannot be readily assessed is the role of fault scale in the
overlap/spacing relationship. Previous workers have attempted to fit a power-law

106
relationship to overlap/spacing data (see Soliva et al., 2006). Although previous work
shows a self-similar relationship in overlap/spacing ratio (as discussed earlier), the scale
of the ramp bounding faults has never been included in this discussion. We posit that the
scatter in the overlap/spacing relationship can be explained by fault scale. Indeed, our
observations show that as the outboard fault gets longer the expected overlap/spacing
ratio is expected to decrease well below the global average (Fig. 4.8).
The observation that fault overlap/spacing ratio shows a scale dependency has
significant implications. For the most part, relay ramps along the largest faults that we
observe have overlap/spacing ratios of about < 2, whereas for outboard faults less than 15
km long, the ratio is highly variable. The question is, why is there relatively little scatter
in the ratio along the large faults? We know from previous work that spacing plays a
critical part in determining the degree of interaction between en echelon faults (e.g.,
Crider & Pollard, 1998; Cowie, 1998; Cowie & Roberts, 2001; Soliva et al., 2006). The
closer two en echelon faults are to one another, the greater the interaction between them,
which ultimately hastens the linking of the segments (Cowie, 1998). To put it another
way, larger spacing (for a given overlap) tends to promote longevity of the ramps, and
therefore ramp topography, in the landscape. Smaller faults (and smaller fault arrays)
would be expected to have more variable overlap/spacing ratios because they are less
mature, and hence more likely to have a wider spread of relay overlap/spacing ratios.
With time, however, as the faults and arrays grow and interact, the larger overlap/spacing
ratio relays are breached, and the outboard fault tip eventually may become inactive and
buried by hanging wall sediments, whereas lower overlap/spacing ratio ramps survive in
the landscape. Physically this makes sense because the faults along the wider relays (i.e.,

107
smaller overlap/spacing ratio) would not be expected to link as quickly as the narrower
(larger ratio) relays. If fault scale is taken into consideration, however, long (>15 km)
outboard faults appear to have overlap/spacing values biased towards about 1, because
they are the only ones that tend to resist breaching. Essentially, nature will tend to bias
the data such that relatively narrow relay ramps tend to not survive along mature
extensional faults.
The answer to the question of why overlap/spacing values are lower at larger fault
lengths may be related to the thickness of the brittle crust in the Basin and Range. The
maximum fault spacing above which faults do not interact is set by fault length and
displacement (Fossen & Rotevatn, 2016). Longer faults, therefore, can interact with one
another over larger spacing values than shorter faults can. All of the fault segments
examined here are interacting with a neighboring segment; this is evidenced by the ramp
geomorphology. In other words, the fluvial systems are obviously influenced by both
faults, not one or the other. While the relationship between fault length and maximum
interaction spacing is well defined over a broad range of scales (Fig. 4.5b, Soliva et al.,
2006; Long & Imber, 2011) there is a scale at which this relationship breaks down.
Soliva et al. (2006) show that overlapping faults that are vertically restricted have an
increasingly difficult time lengthening and propagating passed one another. Furthermore,
the faults do not link when their spacing is above a particular threshold. These
observations suggest that for relays defined by vertically restricted faults, there exists
some upper limit for overlap/spacing values at critical mechanical layer thickness and
fault length values. These observations may explain why the overlap/spacing data at
large outboard fault lengths at our study sites are skewed to less than the expected global

108
overlap/spacing value (Fig. 4.6). The largest faults we examined are large enough to cut
through the entire seismogenic thickness. This thickness controls the extent of patterns of
stress change and is likely to, therefore, control the relay geometry for the large faults.
However, this overlap/spacing-fault scale dependency is inevitably site specific because
it ultimately depends both on this layer thickness and fault length. In the Basin and
Range, seismogenic thickness is about 12-15 km (Stein & Barrientos, 1985; Doser, 1986;
Jackson & White, 1989). Note that this corresponds well to the fault length scale at
which we observe the transition in ramp catchment morphology.
4.5.2 Implications for rift basin stratigraphy and hydrocarbon exploration
This work shows that relay ramp overlap/spacing ratio and fault scale play a role
in governing geomorphological patterns in extensional basins. Previous work has
established that relay ramps are important features in terms of their impact on synrift
sedimentation (e.g., Gawthorpe & Hurst, 1993; Gupta et al., 1999) and their impact on
hydrocarbon systems (Fossen & Rotevatn, 2016, and references therein). The prevailing
conceptual model, however, is too simple because it does not consider the control
imparted by the fault geometry and how ramps evolve geomorphologically.
The results of this study show that at the smaller fault scale (< 15 km length) we
can reliably predict that more than half of the ramp area will drain parallel to fault strike
and towards the ramp toe. This indicates that early synrift sediment dispersal pathways
and depocenter locations should be predictable using the structural framework alone, at
least for smaller faults. The caveat, however, is whether there is a major axial fluvial
system that might redistribute the sedimentary deposits elsewhere in the basin. At larger

109
fault scales, interaction between initially isolated fault systems and basins could lead to a
fluctuation in base level as rifting matures from fluvial to lacustrine. Geomorphic
communication between initially isolated basins could also promote the development of
substantial axial drainage systems, which could redistribute sediment within and between
adjacent basins. Fluctuations in base level and interbasin processes illustrate the growing
complexities in predicating synrift geomorphological and sedimentological patterns at
larger fault lengths. What this means, unfortunately, and what we show here is that as
faults grow larger than 15 km in length, spatial and temporal synrift geomorphological
and sedimentation patterns are unpredictable.
These insights are valuable in regards to hydrocarbon exploration. Faulting
processes affect local rock permeability and seal potential near relay ramps; they can also
act either as fluid migration pathways or barriers to flow into overlying stratigraphic
sections. In long well-linked faults, breached relays can serve as reservoir compartments
(Fossen & Rotevatn, 2016). We have shown that the majority of relay ramps along faults
less than 15-20 km in length are expected to have sediment distribution pathways that
flow parallel to fault strike. Thus the early synrift spatial and temporal predictions of
certain hydrocarbon system variables (especially those related to source or reservoir) can
be made if certain information about the structural geometry is known.
4.6 Conclusion
The observations made in this work show that relay ramp catchment geometry is
associated with specific geometries of the ramp bounding faults. We show that there is a
predictable relationship between relay catchment geometry and fault scale when the

110
outboard fault is less than about 15-20 km long. This relationship, however, breaks down
at longer OFLs. We also show that fault O/S ratio exhibits scale dependence. Our
observations demonstrate that relays along outboard faults greater than about 20 km in
length are only associated with O/S ratios of less than 2. For relays along outboard faults
less than 15 km in length, O/S ratios fall between 1 and 5. These results suggest that
relay ramps are favored to persist in the landscape adjacent to long faults when O/S ratio
is sufficiently low, such that linkage between segments is inhibited. Thus, the relay
topography is preserved in the landscape along longer faults but only at smaller O/S
ratios. Larger O/S ratio relay ramps, however, are less likely to persist, which explains
why they are abundant along smaller, less mature fault systems. These observations are
significant because they allow us to make more reliable predictions of synrift sediment
transport systems, which impact the understanding of extensional landscapes in
continental rifts and synrift hydrocarbon systems. In other words, we can use the
geomorphological relationships observed here in relation to the structural geometry (at
least near shorter faults) to predict early synrift depositional patterns. Our observations,
and the relationships we have noted throughout this work, however, are most applicable
to the early synrift phase.

111
A.1: Appendix A
The following section outlines the basic computational procedures used by HEC-
RAS to calculate water surface elevation. The procedures summarized here are discussed
in detail in the HEC-RAS 4.1 Reference Manual (United States Army Corps of
Engineers, Hydrological Engineering Center, 2010). All reference material and the
model itself are freely available on the United States Army Corps of Engineers’ website
(http://www.hec.usace.army.mil/software/hec-ras/).
A.1.2 Computational Procedures
In HEC-RAS, water surface elevation at a cross-section is calculated by solving
the energy equation:
𝑍2 + 𝑌2 + 𝛼2𝑉2
2
2𝑔= 𝑍1 + 𝑌1 +
𝛼1𝑉12
2𝑔+ ℎ𝑐 (A.1)
Z2 = Elevation of upstream cross-section channel bed above some datum
Z1 = Elevation of downstream cross-section channel bed above some datum
Y2 = Water depth at upstream cross section
Y1 = Water depth at downstream cross section
α1, α2 = Velocity weighting coefficients
g = Gravitational acceleration
hc = energy head loss
(See HEC-RAS 4.1 Reference Manual for the complete definition of terms hc, α1, α2.
Note that expansion and contraction coefficients are left at default settings of 0.3 and 0.1,
respectively. The default settings in HEC-RAS reflect channels that have gradual
variations in channel geometry.)

112
In order to start the procedure to solve for Y2, HEC-RAS requires an initial downstream
water depth, Y1, which in our case is given as normal depth (flow is uniform and steady;
see Table 1 for other parameters used). HEC-RAS uses an iterative procedure where
water surface elevation is determined by balancing the energy equation. HEC-RAS uses
the normal depth condition to calculate a water depth at the most downstream cross-
section and uses this depth to compute water depth at the next upstream cross-section. In
order to balance the energy equation, HEC-RAS first approximates an upstream water
depth using the water depth calculated at the cross-section just downstream. HEC-RAS
assumes the water depth, but if the model cannot balance the energy equation within 20
iterations, the program issues a warning indicating it cannot balance the equation in the
subcritical regime and flags the cross-section. If mixed flow regime is selected (as in our
models), HEC-RAS returns to those cross sections and calculates the water depth using
the momentum equation, given by:
𝑄22𝛽2
𝑔𝐴2+ 𝐴2𝑌2 + (
𝐴1+𝐴2
2) 𝐿𝑆0 − (
𝐴1+𝐴2
2) 𝐿𝑆𝑓 =
𝑄12𝛽1
𝑔𝐴1+ 𝐴1𝑌1 (A.2)
Q2 = upstream discharge
Q1 = downstream discharge
β1,2 = momentum coefficient
A2 = wetted cross-sectional area of upstream cross-section
A1 = wetter cross-sectional area of downstream cross-section
𝑌1 = depth from water surface to centroid of cross-sectional area (downstream cross
section)
𝑌2= depth from water surface to centroid of cross-sectional area (upstream cross section)
L = distance between cross-sections

113
S0 = channel slope
𝑆𝑓 = friction slope
(See HEC-RAS 4.1 Reference Manual for complete definitions of terms).
In channels where the geometry changes rapidly (i.e., sudden changes in slope) the
momentum equation is used to calculate water depth. Because the energy equation is
only considered valid in gradually varied flows, HEC-RAS uses the momentum equation
to solve for water depth when the energy equation returns a water surface elevation at
critical depth. In the case of our study channels, by using the momentum equation to
calculate water depth, HEC-RAS has made the assumption that a hydraulic jump exists
between cross sections.
A.1.3 Model parameters
In order to run a model flow in HEC-RAS certain parameters must be defined or
given a numerical value. Table A.1 shows the parameters used.
Full
Discharge
(m3/s)
Half
Discharge
(m3/s)
Manning’s
n
Boundary
Condition
Flow
Regime
Unlinked
Faults
0.4 0.2 0.0445 Normal
Depth
Mixed
Partially
Breached
Ramp 1
0.15 0.075 0.0675 Normal
Depth
Mixed
Partially
Breached
Ramp 2
0.3 0.15 0.0675 Normal
Depth
Mixed
Fully
Breached
Ramp
0.15 0.075 0.0675 Normal
Depth
Mixed
Table A.1: List of parameters used in HEC-RAS models.

114
We set discharge for the channels by trial and error, as we have no data on discharge.
First, a discharge of about 1.0 m3/s is routed through the system and every cross-section
is inspected. If any cross-section overflows (i.e., any water is present outside of the
cross-section), then discharge is reduced by 0.1 m3/s and the procedure continues until a
discharge is reached that produces no overfilling. We define the largest discharge that
results in no overfilling as ‘full’ discharge. Once a ‘full’ discharge is determined, the
model is run and the values of channel width, water depth and bed shear stress are
extracted and saved. It should be noted that discharge does not change through the
channel reach. Next, the ‘full’ discharge for each channel is halved and the ‘half’
discharge is used to complete a second model run. Channel width, water depth and bed
shear stress values are extracted and saved from the half discharge model run.
In order to see how changes in discharge affect channel width, water depth and
bed shear stress, we show the range of values between full and half discharge. First, the
average values of width, depth and shear stress are calculated and plotted. The
differences between the average and full and half discharge are then plotted as vertical
bars, which denote the variability in values between model runs.
Figures 2.7, 2.8, and 2.9 show the results of the HEC-RAS models. We do not
know how discharge would vary in the real world along each channel reach so we choose
a single discharge to be run for the entire length of the system. With this in mind, the
utility of this analysis is obvious because we can examine how geometry changes through
a channel reach. We take this simplistic approach because we lack the appropriate
information to make discharge variations at each cross section. More specifically, we

115
lack detailed topographic data to make a determination of how much drainage area lies
upstream of a given cross-section.
We determine Manning’s roughness for each field site using guidelines set by the
U.S. Geological Survey (Arcement & Schneider, 1989). While roughness coefficients
were likely different when the channels were active in the past (i.e., changes in
vegetation), our values approximate general channel conditions (e.g., bed material and
channel planform) that have probably not changed very much. We set upstream and
downstream boundary conditions at normal depth, which is defined as the depth when
flow is uniform. In the absence of hydrological data, HEC-RAS limits the boundary
conditions to either normal depth or critical depth. In this case it is unrealistic to choose
critical depth. While we make the simplifying assumption that flow is steady and
uniform at the model endpoints (by assuming normal depth boundary condition), this
assumption is more justifiable. We cannot justify the use of critical depth here because
we observe no features, such as knickpoints, in our channels near the endpoints that
would suggest flow would be critical. An additional consideration we must make is
whether the flow regime is supercritical, subcritical, or mixed. Because we see evidence
of both in our channels (i.e., supercritical at knickpoints or knickzones and subcritical
between knickpoints), we chose mixed flow. The decision to use mixed flow is best in
the case of our study channels, because it gives HEC-RAS the latitude to make more
realistic determinations of water surface elevation.
We specifically do not consider width, depth and bed shear stress data points at
the model endpoints (the first and last cross-sections), because these data contain our
chosen boundary conditions. For this reason, the first and last cross-section in each

116
channel is not shown in the data set. The removed data points translate to about 50 m
from both the upstream and downstream ends of each channel.

117
B.1: Appendix B
This appendix is a compendium of field maps for the 27 sites examined in chapter
4. Each site map contains the mapped fault traces that form the relay ramp, an AR
polygon, an AFP polygon, a spacing line and an overlap line (see Methods section). The
site maps were made using Digital Orthophoto Quarter Quadrangles (DOQQs) and a 10
m digital elevation model (DEM). The surfaces shown in all of the maps are from the
DOQQs. All mapping was performed in ArcGIS v. 10.0. Values obtained for each of
these variables are collated in Table 4.1.
Fig. B1: Site maps of Volcanic Tableland relay ramps.

118
Fig. B2: Site maps of Midway Hills relay ramps.

119
Fig. B3: Site maps of Palisade Mesa, Pearce and Buffalo Creek relay ramps.

120
Fig. B4: Site maps of Big Gulch (Lemhi fault), Blue Dome (Beaverhead fault) and Star Valley (Grand Valley fault) relay ramps.

121
Fig. B5: Site maps of east of Abert Rim and Sheepshead Mountain relay ramps.

122
Fig. B6: Site maps of Catlow Valley relays (A,B,C), Abert Rim and east of Summer Lake relay ramps.
123
Bibliography
ADAMS, K. D., & WESNOUSKY, S. G. (1998) Shoreline processes and the age of the Lake
Lahontan highstand in the Jessup embayment, Nevada. Geol. Soc. Am. Bull., 110,
1318-1332.
AMOS, C.B. & BURBANK, D.W. (2007) Channel width response to differential uplift. J.
Geophys. Res., 112. F02010, doi: 10.1029/2006JF000672.
ANDERSON, R.S. & MENKING, K.M. (1994) The Quaternary marine terraces of Santa Cruz,
California: Evidence for coseismic uplift on two faults. GSA Bull., 106, 649-664.
ARCEMENT, G.J., & SCHNEIDER, V.R. (1989) Guide for selecting manning's roughness
coefficients for natural channels and flood plains. U.S. Geol.Surv. Water-Supply
Pap. 2339, U.S. Geological Survey. Reston, VA.
ATHMER, W. & LUTHI, S.M. (2011) The effect of relay ramps on sediment routes and
deposition: A review. Sed. Geology, 242, 1-17.
ATTAL, M., TUCKER, G.E., WHITTAKER, A.C., COWIE, P.A., & ROBERTS, G.P. (2008)
Modeling fluvial incision and transient landscape evolution: Influence of dynamic
channel adjustment. J. Geophys. Res., 113, F03013, doi: 10.1029/2007Jf000893
ATWOOD, G. (1994) Geomorphology applied to flooding problems of closed-basin
lakes…specifically Great Salt Lake, Utah. Geomorphology, 10, 197-219.
BATEMAN, P.C. (1965) Geology and tungsten mineralization of the Bishop District, CA,
U.S. Geol. Surv. Prof. Pap., 470 Reston, VA.
BONNET, E., BOUR, O., ODLING, N.E., DAVY, P., MAIN, I., COWIE, P. & BERKOWITZ, B.
(2001) Scaling of fracture systems in geological media. Reviews of Geophysics,
39, 347-383.

124
BURBANK, D.W. & ANDERSON, R.S. (2011) Tectonic Geomorphology, 2nd
Edition.
Blackwell Science, 274 pp.
CARTER, D.T., ELY, L.L., O’CONNOR, J.E. & FENTON, C.R. (2006) Late Pleistocene
outburst flooding from pluvial Lake Alvord into the Owyhee River, Oregon.
Geomorphology, 75, 346-367.
CARTWRIGHT, J.A., TRUDGILL, B.D. & MANSFIELD, C.S. (1995) Fault growth by segment
linkage: An explanation for scatter in maximum displacement and trace length
data from the Canyonlands grabens of SE Utah. J. Struct. Geol., 17, 1319-1326.
CARTWRIGHT, J.A., MANSFIELD, C. & TRUDGILL, B. (1996) The growth of normal faults by
segment linkage. from Buchanan, P.G. & Nieuwland, D.A. (eds), 1996) Modern
Developments in Structural Interpretation, Validation and Modelling, Geological
Society Special Publication No. 99, 163-177.
CHILDS, C., WATTERSON, J. & WALSH, J.J. (1995) Fault overlap zones within developing
normal fault systems. J. Geol. Society, 152, 535-549.
CHILDS, C., CONNEALLY, J., DELOGKOS, E., MANZOCCHI, T., NICOL, A., AISLING, S., &
WALSH, J. (2014) A relationship between relay ramp aspect ratio and normal drag:
abstract in Geometry and Growth of Normal Faults, Geol. Soc. London, 101-102.
CHOI, S.J., MERRITTS, D.J. & OTA, Y. (2008) Elevations and ages of marine terraces and
late Quaternary rock uplift in southeastern Korea. J. Geophys. Res., 113, B10403,
doi:10.1029/2007JB005260.
COMMINS, D., GUPTA, S. & CARTWRIGHT, J. (2005) Deformed streams reveal growth and
linkage of a normal fault array in the Canyonlands graben, Utah. Geology, 33,
645-648.

125
COWIE, P.A. & SCHOLZ, C.H. (1992) Physical explanation for the displacement-length
relationship of faults using a post-yield fracture mechanics model. J. Struct. Geol.,
14, 1133-1148.
COWIE, P.A. (1998) A healing-reloading feedback control on the growth rate of
seismogenic faults. J. Struct. Geol., 20, 1075-1087.
COWIE, P.A., GUPTA, S., & DAWERS, N.H. (2000) Implications of fault array evolution for
synrift depocentre development: Insights from a numerical fault growth model.
Basin Res., 12, 241-261.
COWIE, P. & ROBERTS, G.P. (2001) Constraining slip rates and spacings for active normal
faults: J. Struct. Geol., 23, 1901-1915.
COWIE, P.A., ATTAL, M., TUCKER, G.E., WHITTAKER, A.C., NAYLOR, M., GANAS, A. &
ROBERTS, G.P. (2006) Investigation of the surface process response to fault
interaction and linkage using a numerical modeling approach. Basin Res., 18,
231-266.
CRIDER, J.G. (2001) Oblique slip and the geometry of normal-fault linkage: mechanics
and a case study from the Basin and Range in Oregon: J. Struct. Geol., 23, 1997-
2009
CRIDER, J.G. & POLLARD, D.D. (1998) Fault linkage: three-dimensional mechanical
interaction between echelon normal faults: J. Geophys. Res., 103, 24373-24391.
CRONE, A.J. & MACHETTE, M.N. (1984) Surface faulting accompanying the Borah Peak
earthquake, central Idaho: Geology, 12, 664-667.

126
EVANS, J.G. & GEISLER, T.M. (2001) Geologic field-trip guide to Steens Mountain Loop
Road, Harney County, Oregon. U.S. Geol. Surv, Bureau of Land Management
Bull. 2183.
DAVIS, A.M. (2005) Geomorphological evolution of propagating fault tips in extensional
and compressional settings. Unpublished PhD thesis. Imperial College London,
United Kingdom
DAWERS, N.H., ANDERS, M.H. & SCHOLZ, C.H. (1993) Growth of normal faults:
displacement -length scaling. Geology, 21, 1107-1110.
DAWERS, N.H. & ANDERS, M.H. (1995) Displacement-length scaling and fault linkage. J.
Struct. Geol., 17, 607-614.
DAWERS, N.H., & UNDERHILL, J.R. (2000) The role of fault interaction and linkage in
controlling synrift stratigraphic sequences: Late Jurassic, Stratfjord East Area,
Northern North Sea. Am. Asso. of Petrol. Geo. Bull., 84, 45-64.
DENSMORE, A.L., DAWERS, N.H., GUPTA, S., ALLEN, P.A. & GILPIN, R. (2003) Landscape
evolution at extensional relay zones. J. Geophy. Res., 108, B5, doi:
10.1029/2001JB001741.
DENSMORE, A.L., DAWERS, N.H., GUPTA, S., GUIDON, R. & GOLDIN, T. (2004) Footwall
topographic development during continental extension. J. Geophy. Res., 109, doi:
10.1029/2003JF000115.
DIGGLES, M.F., CONRAD, J.E. & SOREGHAN, G.A. (1990) Geologic map of the Diablo
Mountain Wilderness Study Area, Oregon, U.S. Geol. Survey Map MF-2121,
scale 1:48,000.

127
DIXON, T.H., NORABUENA, E. & HOTALING, L. (2003) Paleoseismology and global
positioning system: earthquake-cycle effects and geodetic versus geologic fault
slip rates in the Eastern California Shear Zone. Geology, 31, 55-58.
DOHRENWEND, J.C., SCHELL, B.A., MENGES, C.M., MORING, B.C. & McKITTRICK, M.A.
(1996) Reconnaissance photogeologic map of young (Quaternary and late
Tertiary) faults in Nevada, in Analysis of Nevada’s metal-bearing mineral
resources: D.A. Singer (ed) Nevada Bureau of Mines and Geology Open-File
Report 96-2, 1 pl., scale 1:1,000,000.
DOHRENWEND, J.C., SCHELL, B.A. & MORING, B.C. (1992) Reconnaissance photogeologic
map of young faults in the Millett 1° by 2° quadrangle, Nevada: U.S. Geol. Survey
Miscellaneous Field Studies Map MF-2176, 1 sheet, scale 1:250,000.
DOKKA, R.K. & TRAVIS, C.J. (1990a) Late Cenozoic strike-slip faulting in the Mojave
Desert, California. Tectonics, 9, 311-340.
DOKKA, R.K. & TRAVIS, C.J. (1990b) Role of the eastern California shear zone in
accommodating Pacific-North American plate motion. Geophys. Res. Lett., 17,
1323-1326.
DOSER, D.I. (1986) Earthquake processes in the Rainbow Mountain-Fairview Peak-Dixie
Valley, Nevada region 1954-1959. J. Geophys. Res. 91, 12572-12586.
DUFFY, O.B., BROCKLEHURST, S.H., GAWTHORPE, R.L., LEEDER, E.L. & FINCH, E. (2015)
Controls on landscape and drainage evolution in regions of distributed normal
faulting: Perachora Peninsula, Corinth Rift, Central Greece: Basin Res., 27, 473-
494.

128
DUVALL, A., KIRBY, E. & BURBANK, D. (2004) Tectonic and lithologic controls on
bedrock channel profiles and processes in coastal California. J. Geophys. Res.,
109, F03002, doi: 10.1029/2003JF000086.
FERRILL, D.A., STAMATAKOS, J.A. & SIMS, D. (1999) Normal fault corrugation:
Implications for growth and seismicity of active normal faults. J. Struct. Geol.,
21, 1027-1038.
FERRILL, D.A. & MORRIS, A.P. (2001) Displacement gradient and deformation in normal
fault systems: J. Structural Geol., 23, 619-638.
FINNEGAN, N.J., ROE, G., MONTCOMERY, D.R., & HALLET, B. (2005) Controls on the
channel width of rivers: Implications for modeling fluvial incision of bedrock:
Geology, 33, 229-232.
FOSSEN, H. & ROTEVATN, A. (2016) Fault linkage and relay structures in extensional
settings – a review. Earth Science Reviews, doi: 10.1016/j.earscirev.2015.11.014.
GAWTHORPE, R.L. & HURST, J.M. (1993) Transfer zones in extensional basins: their
structural style and influence on drainage development and stratigraphy. J. Geol.
Soc. London, 150, 1137-1152.
GAWTHORPE, R.L. & LEEDER, M.R. (2000) Tectono-sedimentary evolution of active
extensional basins. Basin Res., 12, 195-218.
GESCH, D.B., OIMOEN, M.J. & EVANS, G.A. (2014) Accuracy assessment of the U.S.
Geological Survey National Elevation Dataset, and comparison with other large-
area elevation datasets – SRTM and ASTER. U.S. Geol. Surv. Open-File Report
2014-1008.

129
GILBERT, G.K. (1877) Geology of the Henry Mountains, U.S. Geol. Surv. Report, pp.
160.
GILBERT, C.M. (1938) Welded tuff in eastern California. Geol. Soc. Am. Bull., 49, 1829-
1862.
GILPIN, R. (2003) Interaction between stream development and propagating extensional
faults. Unpublished PhD Thesis, University of Edinburgh, Scotland.
GOETHALS, M.M., NIEDERMANN, S., HETZEL, R. & FENTON, C.R. (2009) Determining the
impact of faulting on the rate of erosion in a low-relief landscape: A case study
using in situ produced 21
Ne on active normal faults in the Bishop Tuff, California.
Geomorphology, 103, 401-413.
GUPTA, S., COWIE, P.A., DAWERS, N.H. & UNDERHILL, J.R. (1998) A mechanism to
explain rift-basin subsidence and stratigraphic patterns through fault-array
evolution. Geology, 26, 595-598.
GUPTA, S., UNDERHILL, J.R., SHARP, I. & GAWTHORPE, R.L. (1999) Role of fault
interactions in controlling synrift sediment dispersal patterns: Miocene, Abu
Alaqa Group, Suez Rift, Sinai, Egypt. Basin Res., 11, 167-189.
GUPTA, A. & SCHOLZ, C.H. (2000) A model of normal fault interaction based on
observation and theory. J. Structural Geol., 22, 865-879.
HACK, J.T. (1957) Studies of longitudinal stream profiles in Virginia and Maryland. U.S.
Geol. Surv. Prof. Pap., 294-B, Reston, VA.
HARE, L., FERGUSON, J. F., AIKEN, C. L. V. & OLDOW, J. S. (2001) Quantitative
characterization and elevation estimation of Lake Lahontan shoreline terraces

130
from high-resolution digital elevation models. J. Geophys. Res., 106, B11,
26761-26774.
HODGKINSON, K.M., STEIN, R.S. & KING, G.C.P. (1996) The 1954 Rainbow Mountain-
Fairview Peak- Dixie Valley earthquakes: A triggered normal faulting sequence.
J. Geophys. Res.,101, 25459-25471.
HOOPER, P. R., BINGER, G. B. & LEES, K. R. (2002) Ages of the Steens and Columbia
River flood basalts and their relationship to extension-related calc-alkalic
volcanism in eastern Oregon. GSA Bul., 114, 43-50.
HOPKINS, M.C. & DAWERS, N.H. (2015) Changes in bedrock channel morphology driven
by displacement rate increase during normal fault interaction and linkage. Basin
Res., 27, 43-59.
HUS, R., ACOELLA, V., FUNICIELLO, R., & DE BATIST, M. (2005) Sandbox models of relay
ramp structure and evolution. J. Struct. Geol., 27, 549-473.
IBARRA, D.E., EGGER, A.E., WEAVER, K.L., HARRIS, C.R. & MAHER, K. (2014) Rise and
fall of late Pleistocene pluvial lakes in response to reduced evaporation and
precipitation: Evidence from Lake Surprise, California. GSA Bull., 126, 1387-
1415.
IMBER, J., TUCKWELL, G.W., CHILDS, C., WALSH, J.J., MANZOCCHI, T., HEATH, A.E.,
BONSON, C.G. & STRAND, J. (2004) Three-dimensional distinct element modelling
of relay growth and breaching along normal faults. J. Struct. Geol., 26, 1897-
1911.
JACKSON, J. & LEEDER, M. (1994) Drainage systems and the development of normal
faults: an example from Pleasant Valley, Nevada: J. Struct. Geol., 16, 1041-1059.
131
JACKSON, J.A. & WHITE, N.J. (1989) Normal faulting in the upper continental crust:
observations from regions of active extension. J. Struct. Geol., 11, 15-36.
KIRBY, E., & WHIPPLE, K. X. (2012) Expression of active tectonics in erosional landscapes.
J. Struct. Geol., 44, 54-75.
LICCIARDI, J.M. (2001) Chronology of latest Pleistocene lake-level fluctuations in the
pluvial Lake Chewaucan basin, Oregon, USA. J. Quat. Sci., 16, 545-553.
LIDKE, D.J. (compiler) (2000) Fault number 1192, Buffalo Creek fault zone, in
Quaternary fault and fold database of the United States: U.S. Geol. Surv. website,
<http://earthquakes.usgs.gov/hazards/qfaults>
LIENKAEMPER, J.J., PEZZOPANE, S.K., CLARK, M.M., & RYMER, M.J. (1987) Fault
fractures formed in association with the 1986 Chalfant Valley, California,
earthquake sequence: Preliminary report. Bull. Seismol. Soc. Am., 77, 297-305.
LOCKE, W. W. & MEYER, G.A. (1994) A 12,000-year record of vertical deformation
across the Yellowstone caldera margin: The shorelines of Yellowstone Lake. J.
Geophys. Res., 99, B10, 20079-20094.
LONG, J.J. & IMBER, J. (2011) Geological controls on fault relay zone scaling: J. Struct.
Geol., 33, 1790-1800.
LUDINGTON, S., MORING, B.C., FLYNN, K.S. & HOPKINS, M.J. (2005) Preliminary
integrated databases for the United States – western states: California, Nevada,
Arizona, and Washington. U.S. Geological Survey Open File Report2005-1305.
McCALPIN, J.P., MACHETTE, M.N. & HALLER, K.M. (compilers) (2011) Fault number
726d, Grand Valley fault, Star Valley section, in Quaternary fault and fold

132
database of the United States: U.S. Geological Surv. website,
<http://earthquakes.usgs.gov/hazards/qfaults>
McLEOD, A.E., UNDERHILL, J.R., DAVIES, S.J. & DAWERS, N.H. (2002) The influence of
fault array evolution on synrift sedimentation patterns: Controls on deposition in
the Strathspey-Brent-Statfjord half graben, northern North Sea: AAPG Bull., 86,
1061-1093.
MERRITTS, D.J. & BULL, W.B. (1989) Interpreting Quaternary uplift rates at the
Mendocino triple junction, northern California, from uplifted marine terraces.
Geology, 17, 1020-1024.
MILLER, M.M., JOHNSON, D.J., DIXON, T.H. & DOKKA, R.K. (2001) Refined kinematics of
the Eastern California Shear Zone from GPS observations, 1993-1998. J.
Geophys. Res., 103, 2245-2263.
NEGRINI, R.M. (2002) Pluvial lake sizes in the northwestern Great Basin throughout the
Quaternary period. in Great Basin Aquatic Systems History, Hershler, R., Madsen
D.B., & Currey D.R, (eds). Smithsonian Contributions to the Earth Sciences No.
33, Smithsonian Press; Washington, DC.
O’CONNEL, J.F. & INOWAY, C.M. (1994) Surprise Valley projectile points and their
chronological implications. J. Calif. Great Basin Anthro., 16, 162.198.
OLDOW, J. S. & SINGLETON, E. S. (2008) Application of Terrestrial Laser Scanning in
determining the pattern of late Pleistocene and Holocene fault displacement from
the offset of pluvial lake shorelines in the Alvord extensional basin, northern
Great Basin, USA. Geosphere, 4, 536-563.

133
PEACOCK, D.C.P., & SANDERSON, D.J. (1991) Displacements, segment linkage and relay
ramps in normal fault zones. J. Struct. Geol., 13, 721-733.
PEACOCK, D.C.P. & SANDERSON, D.J. (1994) Geometry and development of relay ramps
in normal fault systems. AAPG Bull., 78, 147-165.
PERSONIUS, S.F. (compiler) (2002) Fault number 1800, Unnamed Sheepshead Mountains
fault, in Quaternary fault and fold database of the United States: U.S. Geol. Surv.
website, <http://earthquakes.usgs.gov/hazards/qfaults>
PEZZOPANE, S.K. & WELDON II, R.J. (1993) Tectonic role of active faulting in central
Oregon. Tectonics, 12, 1140-1169.
PHILLIPS, J.D. & LUTZ, J.D. (2008) Profile convexities in bedrock and alluvial streams.
Geomorphology, 102, 554-566.
PIETY, L.A., SULLIVAN, T.J. & ANDERS, M.H. (1992) Segmentation and paleoseismicity of
the Grand Valley fault, southeastern Idaho and western Wyoming. in Regional
geology of eastern Idaho and western Wyoming (eds) Paul Link, Mel Kuntz &
Lucian Platt, Geol. Society Am. Memoir, 179, 155-182.
PINTER, N. (1995) Faulting on the Volcanic Tableland, Owens Valley, California. J.
Geol., 103, 73-83.
PINTER, N. & KELLER, E.A. (1995) Geomorphological analysis of neotectonic
deformation, northern Owens Valley, California. Geol. Rund., 84, 200-212.
PINTER, N., KELLER, E.A., & WEST, R.B. (1994) Relative dating of terraces of the Owens
River, Northern Owens Valley, California, and correlation with moraines of the
Sierra Nevada. Quat. Res., 42, 266-276.

134
REED, S.L., LINK, P.K., STANFORD, L.R. & LONG, S.P. (2012) Geologic Map of Idaho,
Idaho Geological Surv., scale 1:750,000.
REHEIS, M.C., 1999. Extent of Pleistocene lakes in the western Great Basin. U.S. Geol.
Surv. Miscellaneous Field Studies Map MF-2323, scale 1:800,000.
Survey Miscellaneous Field Studies Map MF-2323, scale 1:800,000.
REHEIS, M.C., ADAMS, K.D., OVIATT, C.G. & BACON, S.N. (2014) Pluvial lakes in the
Great Basin of the western United States – a view from the outcrop. Quat. Sci.
Rev., 97, 33-57.
SARNA-WOJCICKI, A.M., PRINGLE, M.S. & WIJBRANS, J. (2000) New 40
Ar/39
Ar Age of the
Bishop Tuff from multiple sites and sediment rate calibration for the Matuyama-
Brunhes boundary. J. Geophys. Res., 105, 21431-21443.
SAWYER,T.L.(compiler) (1998) Fault number 1342, Midway Hills fault, in Quaternary
fault and fold database of the United States: U.S. Geol. Surv.
<http://earthquake.usgs.gov/hazards/qfaults>.
SCARBERRY, K. C., MEIGS, A. J. & GRUNDER, A. L. (2010) Faulting in a propagating
continental rift: Insight from the late Miocene structural development of the Abert
Rim fault, southern Oregon, USA. Tectonophysics, 488, 71-86.
SCHELL, B.A. (1981) Faults and lineaments in the MX Sitting Region, Nevada and Utah,
Volume I: Technical report to U.S. Department of [Defense] the Air Force,
Norton Air Force Base, California, under Contract FO4704-80-C-0006,
November 6, 1981, 77 p.

135
SCOTT, A.T. & PINTER, N. (2003) Extraction of coastal terraces and shoreline-angle
elevations from digital terrain models, Santa Cruz and Anacapa Islands,
California. Phys. Geography, 24, 271-294.
SOLIVA, R., BENEDICTO, A. & MAERTEN, L. ( 2006) Spacing and linkage of confined
normal faults: Importance of mechanical thickness: J. Geophys. Res., 111, doi:
10.1029/2004JB003507.
STEIN, R.S. & BARRIENTOS, S.E. (1985) Planar high-angle faulting in the Basin and
Range: geodetic analysis of the 1983 Borah Peak, Idaho, earthquake. J. Geophys.
Res., 90, 11355-11366.
TOPAL, S., KELLER, E., BUFE, A. & KOCYIGIT, A. (2016) Tectonic geomorphology of a
large normal fault: Aksehir fault, SW Turkey. Geomorphology. doi:
10.1016/j.geomorph.2016.01.014.
TRUDGILL, B. & CARTWRIGHT, J. (1994) Relay-ramp forms and normal-fault linkage,
Canyonlands National Park, Utah. Geol. Soc. Am. Bull., 106, 1143-1157.
TUROWSKI, J.M., LAGUE, D., CRAVE, A., & HOVIUS, N. (2006) Experimental channel
response to tectonic uplift. J. Geophys. Res., 111, doi: 10.1029/2005JF000306.
TUROWSKI, J.M., LAGUE, D., & HOVIUS, N. (2007) Cover effect in bedrock abrasion: A
new derivation and its implications for the modeling of bedrock channel
morphology. J. Geophys. Res., 112, doi: 10.1029/2006JF000697.
UNITED STATES ARMY CORPS OF ENGINEERS, HYDROLOGIC ENGINEERING CENTER (2010)
HEC-RAS River Analysis System: User’s Manual, Applications Guide, Hydraulic
Reference Manual. United States Army Corps of Engineers: Institute for Water

136
Resources, Davis, CA. http://www.hec.usace.army.mil/software/hec-ras/hecras-
document.html
VANDER MEULEN, D. B., GRISCOM, A., KING, H. D., VERCOUTERE, T. L. & MOYLE, P.R.
(1988) Mineral Resources of the Home Creek Wilderness Study Area Harney
County, Oregon. U.S. Geol. Surv. Bulletin 1740-C.
WALLACE, R.E. (1984) Fault scarps formed during the earthquakes of October 2, 1915 in
Pleasant Valley, Nevada, and some tectonic implications. Prof. Pap. U.S. Geol.
Surv. 1274A, 1-33.
WALKER, G.W. & MACLEOD, N.S. (1991) Geologic map of Oregon: U.S. Geol. Surv.,
scale 1:500,000.
WELDON, R.J., FLETCHER, D.K., WELDON, E.M., SCHARER, K.M. & McCRORY, P.A. (2002)
An update of Quaternary faults of central and eastern Oregon: U.S. Geol. Surv.
Open-File Report 02-301.
WHIPPLE, K.X. (2004) Bedrock rivers and the geomorphology of active orogens. Ann.
Rev. Earth and Planet. Sci., 32, 151-185.
WHITTAKER, A.C., COWIE, P.A., ATTAL, M., TUCKER, G.E. & ROBERTS, G.P. (2007a)
Bedrock channel adjustment to tectonic forcing: Implications for predicting river
incision rates. Geology, 35, 103-106.
WHITTAKER, A.C., COWIE, P.A., ATTAL, M., TUCKER, G.E., & ROBERTS, G.P. (2007b)
Contrasting transient and steady-state rivers crossing active normal faults: New
field observations from the central Apennines, Italy. Basin Res., 19, 529-556.

137
WHITTAKER, A.C., ATTAL, M., COWIE, P.A., TUCKER, G.E. & ROBERTS, G.P. (2008)
Decoding temporal and spatial patterns of fault uplift using transient river long
profiles. Geomorphology, 100, 506-526.
WHITTAKER, A.C. & WALKER, S.A. (2015) Geomorphic constraints on fault throw rates
and linkage times: Examples from the Northern Gulf of Evia, Greece. J.
Geophys. Res. Earth Surface. 120, 137-158.
WILLDEN, R. & SPEED, R.C. (1974) Geology and mineral deposits of Churchill County,
Nevada: Nevada Bureau of Mines and Geology Bulletin 83, 95 p.
WILLEMSE, E.J.M., POLLARD, D.D. & AYDIN, A. (1996) Three-dimensional analyses of
slip distributions on normal fault arrays with consequences for fault scaling. J.
Struct. Geol., 18, 295-309.
WILLEMSE, E.J.M. (1997) Segmented normal faults: Correspondence between three-
dimensional mechanical models and field data. J. Geophys. Res – Solid Earth,
102, 675-692.
WILLETT, S.D., MCCOY, S.W., PERRON, J.T., GOREN, L. & CHEN, C. (2014) Dynamic
reorganization of river basins. Science, 343, 1117-1126
WILSON, C.J.N., & HILDRETH, W. (1997) The Bishop Tuff: New insights from eruptive
stratigraphy. J. Geol., 105, 407-439.
WOBUS, C.W., TUCKER, G.E., & ANDERSON, R.S. (2006) Self-formed bedrock channels.
Geophys. Res. Lett., 33, doi: 10.1029/2006GL027182.
YANITES, B.J. & TUCKER, G.E. (2010) Controls and limits on bedrock channel geometry.
J. Geophys. Res., 115, F04019, doi: 10.1029/2009JF001601.

138
YILDIRIM, C., MELNICK, D., BALLATO, P., SCHILDGEN, T.F., ECHTLER, H., ERGINAL, A.E.,
GÜNEC KIYAK, N. & STRECKER, M.R. (2013) Differential uplift along the northern
margin of the Central Anatolian Plateau: inferences from marine terraces. Quart.
Sci. Rev., 81, 12-28.

139
Biography
Michael C. Hopkins was born May 2, 1986 in Biloxi, Mississippi. He is the youngest of
three children. His parents are Michael T. Hopkins and Trudy A. Landry, both are
natives of Biloxi. He graduated from Biloxi High School in 2004. Following high
school, he attended Mississippi Gulf Coast Community College for two years (2004-
2006) and spent one year at the University of South Alabama (2006-2007) before earning
a BS in geology from the University of Southern Mississippi in 2010. In 2010, he started
graduate work at Tulane University under Nancye H. Dawers and completed this Ph.D.
dissertation in 2016.