geomatics engineering program at california state ... · gme 15. engineering surveying principles...
TRANSCRIPT
GEOMATICS ENGINEERING PROGRAM AT CALIFORNIA STATE UNIVERSITY, FRESNO AND UAV MAPPING
Riadh Munjy [email protected] California State University, Fresno
9/30/2015 ASPRS 2015
1
OUTLINE
Introduction Faculty Course Map Equipment Student Activities Our Graduates Current Research
INTRODUCTION
The Geomatics Engineering degree program at the California State University in Fresno was created in 1971, being the first of its kind in the nation.
Continuously accredited in 1982, 1985, 1988, 1994, 2000, 2006 and 2012, the program has maintained a focus on student learning.
The recent ABET report (2012) did not find a single weakness or deficiency in the program.
FACULTY
Prof Riadh Munjy Prof. Emeritus James Crossfield Prof. Emeritus Fareed Nader Asst. Prof Mustafa Barber Asst. Prof Scott Peterson
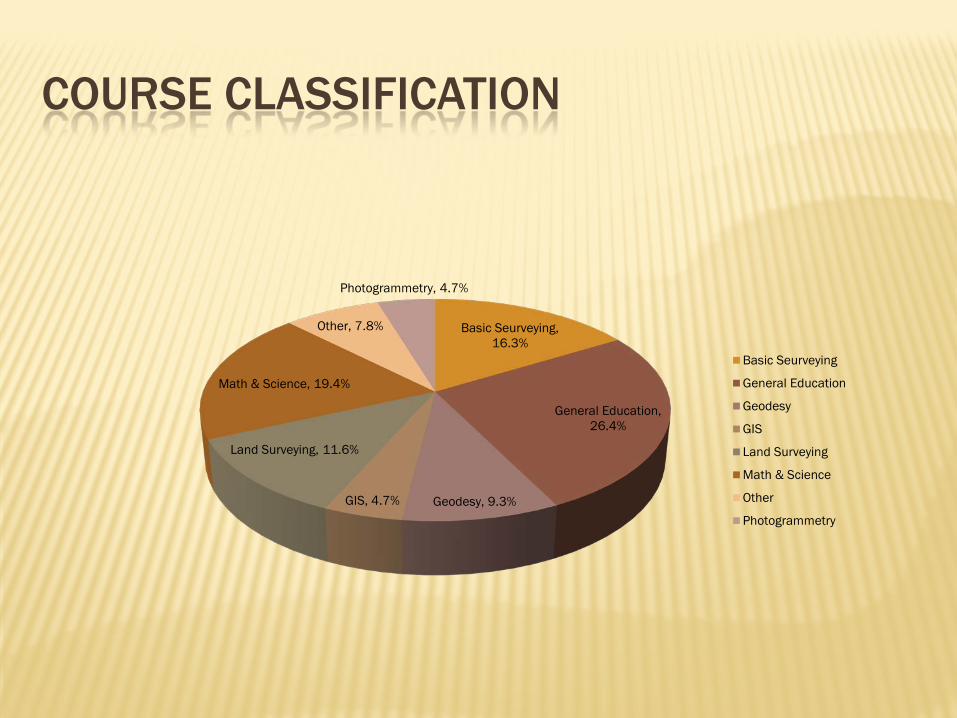
COURSE CLASSIFICATION
Basic Seurveying, 16.3%
General Education, 26.4%
Geodesy, 9.3% GIS, 4.7%
Land Surveying, 11.6%
Math & Science, 19.4%
Other, 7.8%
Photogrammetry, 4.7%
Basic Seurveying
General Education
Geodesy
GIS
Land Surveying
Math & Science
Other
Photogrammetry
MATH & SCIENCE
GME 34. Adjustment Computations Error theory, adjustment of simple survey networks,
and matrix methods; digital computer solutions of geomatics computation and adjustment problems.
GME 135. Advanced Adjustment Computations Statistics, propagation of errors, advanced theory of
least squares optimization algorithms. Computer programming for complex surveying and photogrammetry adjustment applications. Project design.
BASIC SURVEYING GME 1. Introduction to Geomatics Engineering
An introduction to geomatics engineering philosophical thought; geomatics engineering profession and career opportunities; professional ethics and safety; creative and critical thinking applied to the geomatics engineering decision-making process.
GME 15. Engineering Surveying Principles of surveying measurements for distance, direction, elevation, topographic and planimetric mapping,
horizontal curves, vertical curves, earthwork and engineering applications.
GME 16. Municipal Surveying Instrumentation; automated electronic survey data collection; land survey; introduction to photogrammetry, GPS,
GIS, and control surveys. Astronomy for azimuth applications.
GME 23L. Optics and Waves Visual optics, prisms, lenses, and collimated light, electromagnetic spectrum and waves, wave properties and
atmospheric interactions, optical and electromagnetic imaging systems. GPS, GIS, remote sensing, photogrammetric and EDM applications.
GME 40. Route and Construction Surveying Computations and theory covering surveys for highway, irrigation, rail, pipeline, and other transportation
alignment projects. Includes computer solutions and applications.
GME 61. Microcomputers in Engineering Microcomputer operating systems; introduction to high level computer languages, file processing, program
documentation, testing, and debugging.
GME 66. Computer-Aided Mapping Preparing transportation alignment, topographic, property boundary, environmental, cross section, structural and
GIS maps and plans. Civil and Geomatics Engineering and Construction applications. Includes comprehensive computer mapping design experience.
LAND SURVEYING
GME 50. Land Surveying The United States Public Land Survey System with special emphasis on California; introduction
to the California Land Surveyors Act, Certified, A.L.T.A. and mortgage surveys; sectionalized land subdivision, corner restoration, resurveys, evidence, and descriptions.
GME 151. Boundary Control and Legal Principles Legal principles that control the boundary location of real property
GME 152. Real Property Descriptions Theory and practice of real property descriptions and recording systems; metes and bounds,
United States Public Land Survey System, lot and block and other styles investigated; practical exercises and case studies.
GME 153. Boundary Survey Design Design of evidence gathering, resurvey, retracement, and analysis techniques for complex United
States Public Land Survey System, metes and bounds, riparian, mineral, land grant and fraudulent surveys; case studies
GME 159. Subdivision Design Subdivision map act, local subdivision regulations, title search, zoning study. Tentative and final
subdivision layout, map drafting, computerized subdivision design, and drafting; environmental impact study. Field trips required
GEODESY
GME 102. Geodetic Surveying Prerequisites: GME 16, GME 34. Horizontal and vertical geodetic networks for deformation,
industrial tooling and local area applications; theory and application of State Plane Coordinate systems.
GME 108. Geodesy Prerequisites: MATH 77, PHYS 4A, PHYS 4AL, GME 34 or concurrently. Size and shape of the
earth; three-dimensional coordinate systems; computations on the spheroid; reduction to plane coordinates; introduction to differential equations, gravity modeling and gravity measurements.
GME 143. Satellite Geodesy Prerequisites: GME 102, GME 108, GME 135 or concurrently. Motion of a satellite, orbit
geometry and perturbations; time measuring systems; global geodesy model; reduction and adjustment of GPS and other satellite observation data; differential equations of orbit relaxation; GPS network optimization; data transformation.
GME 145. Geopositioning Prerequisites: GME 102, GME 108, GME 135. Design of planning, data collection, data
processing and network adjustment applications; kinematic and real-time GPS applications; case studies.
PHOTOGRAMMETRY
GME 123. Stereo-Photogrammetry Imaging systems; image quality. Theory of stereo-
photogrammetry; orientation of stereo-model. Design and operating principles of stere-oplotters. Photogrammetric mapping; orthophoto mapping. Project planning.
GME 125. Analytical Photogrammetry Introduction to analytical photogrammetry; strip and
block aerial triangulation. Design and operating principles of analytical plotters. Introduction to soft-copy photogrammetry.
GIS
GME 126. Digital Mapping Design of data input, editing, display and processing
mechanisms for digital mapping applications; hardware considerations and software design for DTM applications.
GME 173. Introduction to GIS Data quality and accuracy, privacy, ethics, institutional,
governmental and technological issues associated with GIS; hardware and software considerations for geodetically controlled cadastral, resource and environmental GIS applications; existing system case studies.
OTHER
GME 180. Senior Project Prerequisites: GME 181or concurrently. UDWE or a "W" course or
concurrently. Study of a problem under supervision of a faculty member; final typewritten report required. Individual project except by special permission. GME 180 and GME 181 satisfy the senior major requirement for the B.S. in Geomatics Engineering.
GME 181. Project Design Prerequisite: GME 108, GME 123, GME 135, GME 151, GME 173.
Design of control, boundary location, and photogrammetric systems. Evaluation of design requirements, economic, and social considerations. Case Studies. Student presentations. GME 180 and GME 181 satisfy the senior major requirement for the B.S. in Geomatics Engineering.
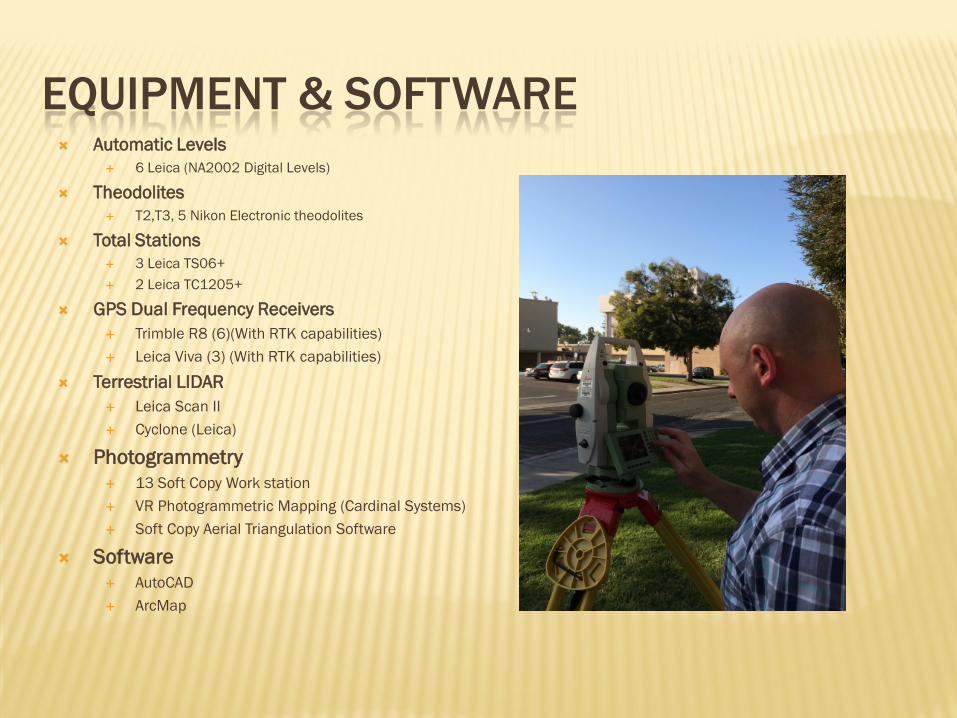
EQUIPMENT & SOFTWARE Automatic Levels
6 Leica (NA2002 Digital Levels)
Theodolites T2,T3, 5 Nikon Electronic theodolites
Total Stations 3 Leica TS06+ 2 Leica TC1205+
GPS Dual Frequency Receivers Trimble R8 (6)(With RTK capabilities) Leica Viva (3) (With RTK capabilities)
Terrestrial LIDAR Leica Scan II Cyclone (Leica)
Photogrammetry 13 Soft Copy Work station VR Photogrammetric Mapping (Cardinal Systems) Soft Copy Aerial Triangulation Software
Software AutoCAD ArcMap
EQUIPMENT PHOTOGRAMMETRY
EQUIPMENT PHOTOGRAMMETRY

EQUIPMENT LIDAR

EQUIPMENT GPS
STUDENT ACTIVITIES FORESIGHT

STUDENT ACTIVITIES 2014 ANNUAL CONFERENCE
STUDENT ACTIVITIES ANNUAL CONFERENCE
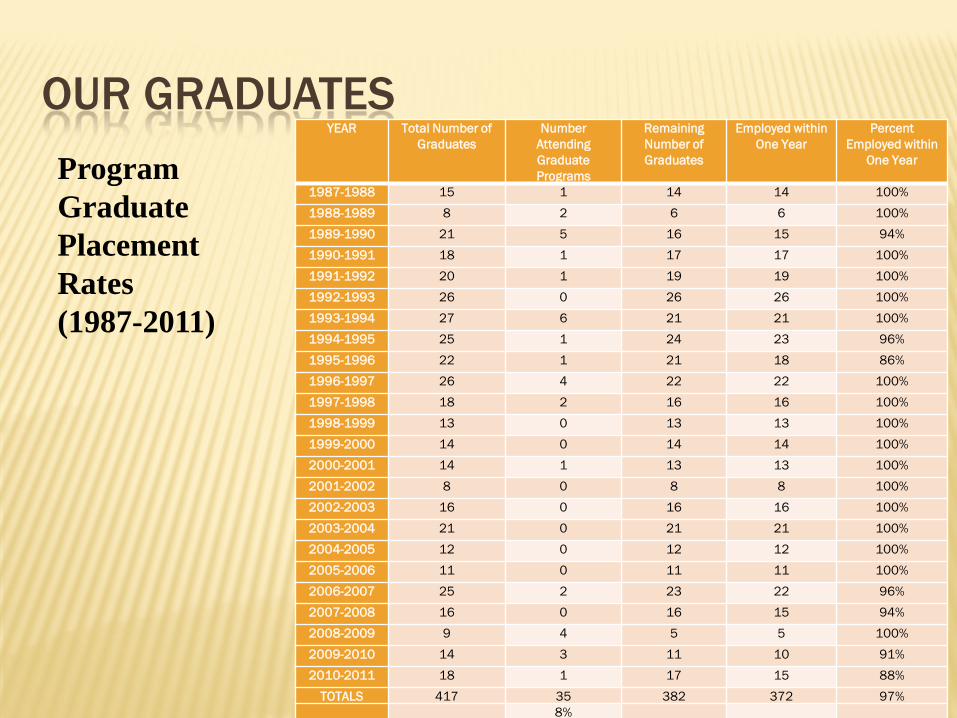
OUR GRADUATES YEAR Total Number of
Graduates Number
Attending Graduate Programs
Remaining Number of Graduates
Employed within One Year
Percent Employed within
One Year
1987-1988 15 1 14 14 100% 1988-1989 8 2 6 6 100% 1989-1990 21 5 16 15 94% 1990-1991 18 1 17 17 100% 1991-1992 20 1 19 19 100% 1992-1993 26 0 26 26 100% 1993-1994 27 6 21 21 100% 1994-1995 25 1 24 23 96% 1995-1996 22 1 21 18 86% 1996-1997 26 4 22 22 100% 1997-1998 18 2 16 16 100% 1998-1999 13 0 13 13 100% 1999-2000 14 0 14 14 100% 2000-2001 14 1 13 13 100% 2001-2002 8 0 8 8 100% 2002-2003 16 0 16 16 100% 2003-2004 21 0 21 21 100% 2004-2005 12 0 12 12 100% 2005-2006 11 0 11 11 100% 2006-2007 25 2 23 22 96% 2007-2008 16 0 16 15 94% 2008-2009 9 4 5 5 100% 2009-2010 14 3 11 10 91% 2010-2011 18 1 17 15 88%
TOTALS 417 35 382 372 97% 8%
Program Graduate Placement Rates (1987-2011)
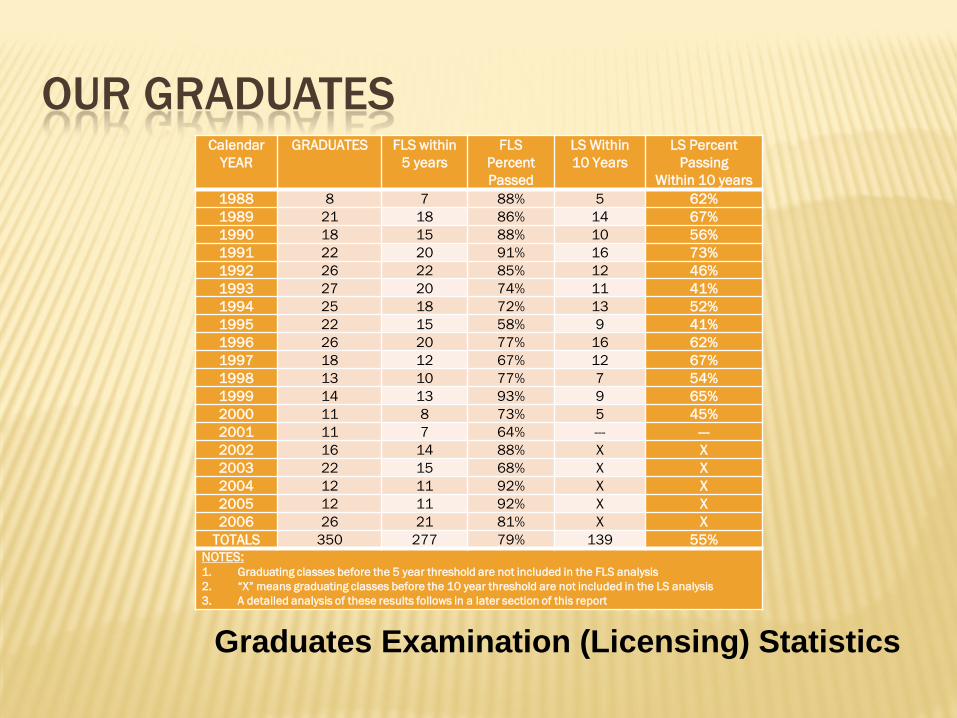
OUR GRADUATES Calendar
YEAR GRADUATES FLS within
5 years FLS
Percent Passed
LS Within 10 Years
LS Percent Passing
Within 10 years 1988 8 7 88% 5 62% 1989 21 18 86% 14 67% 1990 18 15 88% 10 56% 1991 22 20 91% 16 73% 1992 26 22 85% 12 46% 1993 27 20 74% 11 41% 1994 25 18 72% 13 52% 1995 22 15 58% 9 41% 1996 26 20 77% 16 62% 1997 18 12 67% 12 67% 1998 13 10 77% 7 54% 1999 14 13 93% 9 65% 2000 11 8 73% 5 45% 2001 11 7 64% --- --- 2002 16 14 88% X X 2003 22 15 68% X X 2004 12 11 92% X X 2005 12 11 92% X X 2006 26 21 81% X X
TOTALS 350 277 79% 139 55% NOTES: 1. Graduating classes before the 5 year threshold are not included in the FLS analysis 2. “X” means graduating classes before the 10 year threshold are not included in the LS analysis 3. A detailed analysis of these results follows in a later section of this report
Graduates Examination (Licensing) Statistics
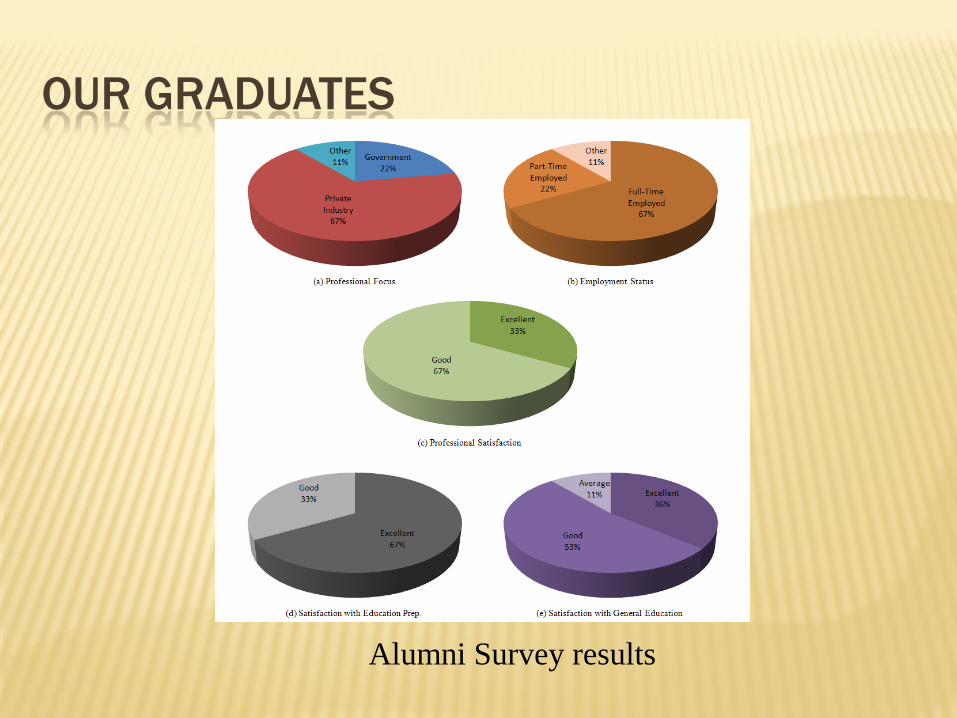
OUR GRADUATES
Alumni Survey results
CURRENT RESEARCH
Airborne GPS Photogrammetry UAS Mapping LIDAR adjustment and Visualization Kinect Calibration for mapping Image Balancing
UAS MAPPING PROJECT ONE
25
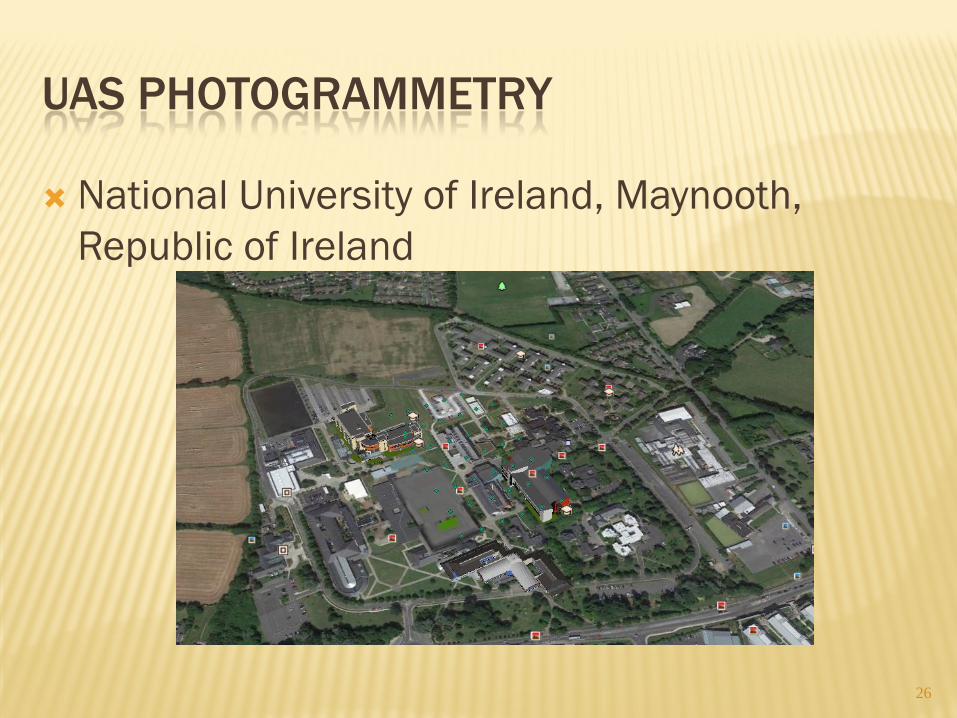
UAS PHOTOGRAMMETRY
National University of Ireland, Maynooth, Republic of Ireland
26
UAS PHOTOGRAMMETRY
27
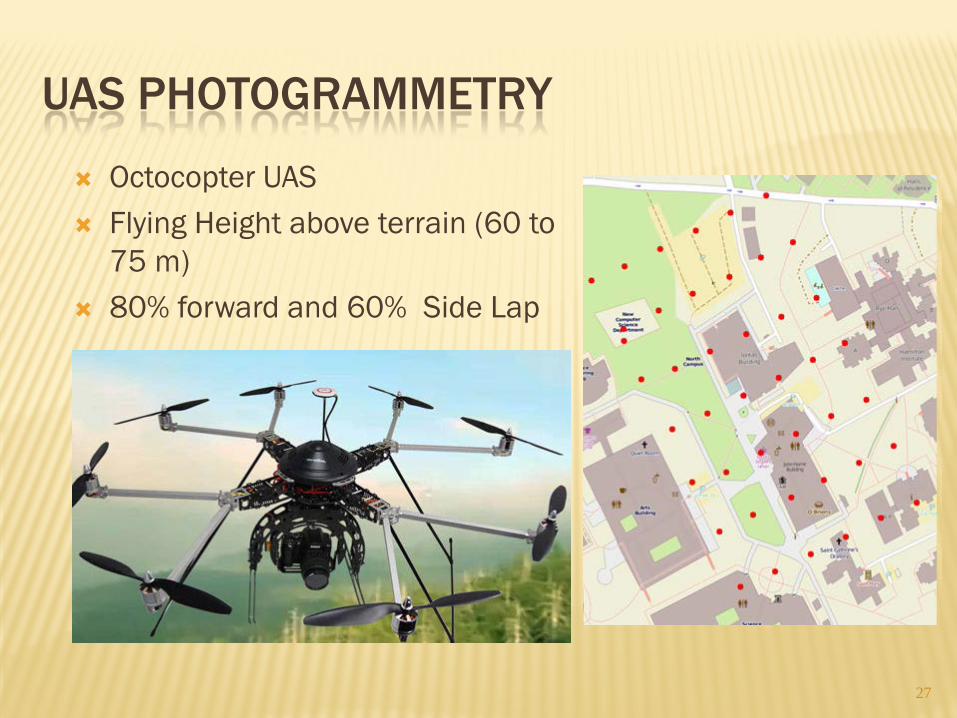
Octocopter UAS Flying Height above terrain (60 to
75 m) 80% forward and 60% Side Lap
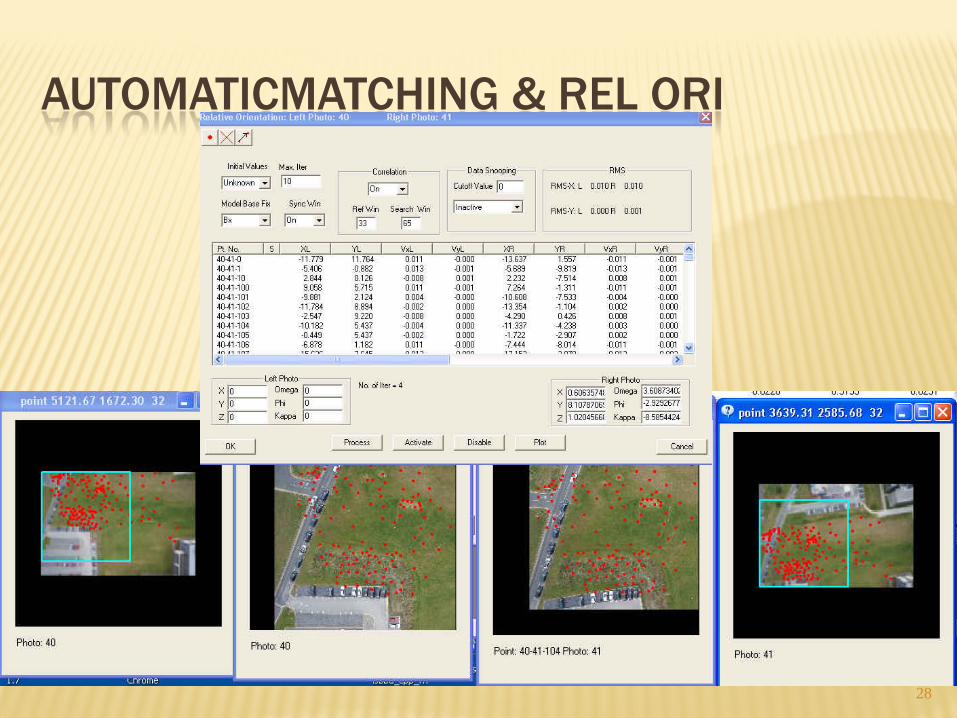
AUTOMATICMATCHING & REL ORI
28
UAS MAPPING PROJECT TWO
29
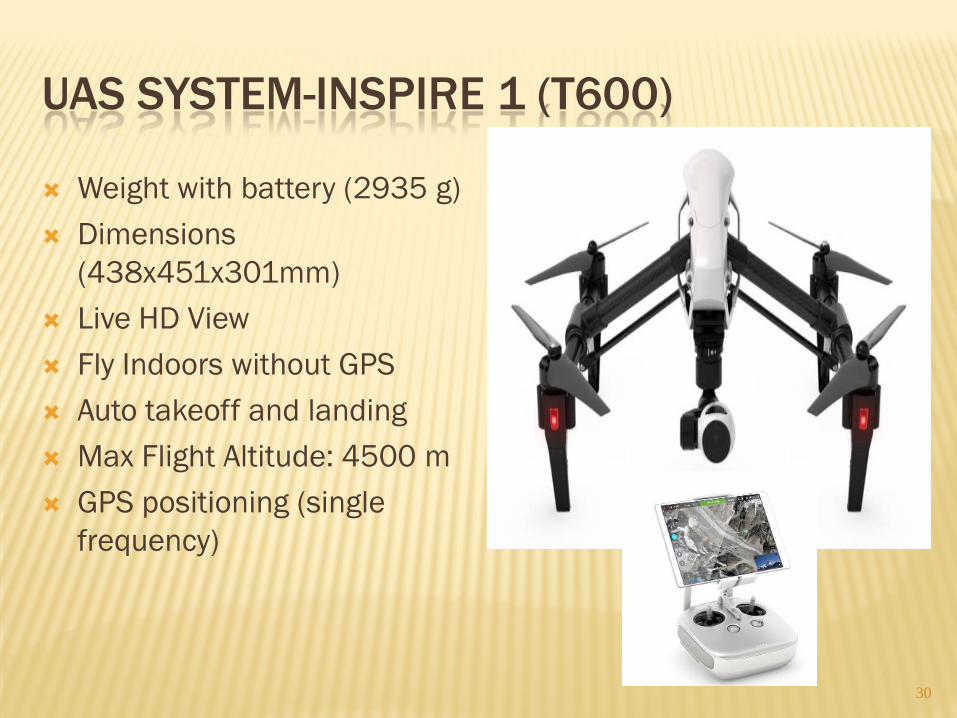
UAS SYSTEM-INSPIRE 1 (T600)
30
Weight with battery (2935 g) Dimensions
(438x451x301mm) Live HD View Fly Indoors without GPS Auto takeoff and landing Max Flight Altitude: 4500 m GPS positioning (single
frequency)

UAS-CAMERA X3-FC350
Focal length : 5.101 mm (20
mm, 35 mm format equivalent)
Pixel Size 0.00134 mm Frame size: 3992 x 2992
pixels Field of view: 94 deg CMOS: Sony EXMOR 1/2.3” Modular 3 Axis rotating gimbal
allowing full tilt, roll and 360 degrees yaw 31
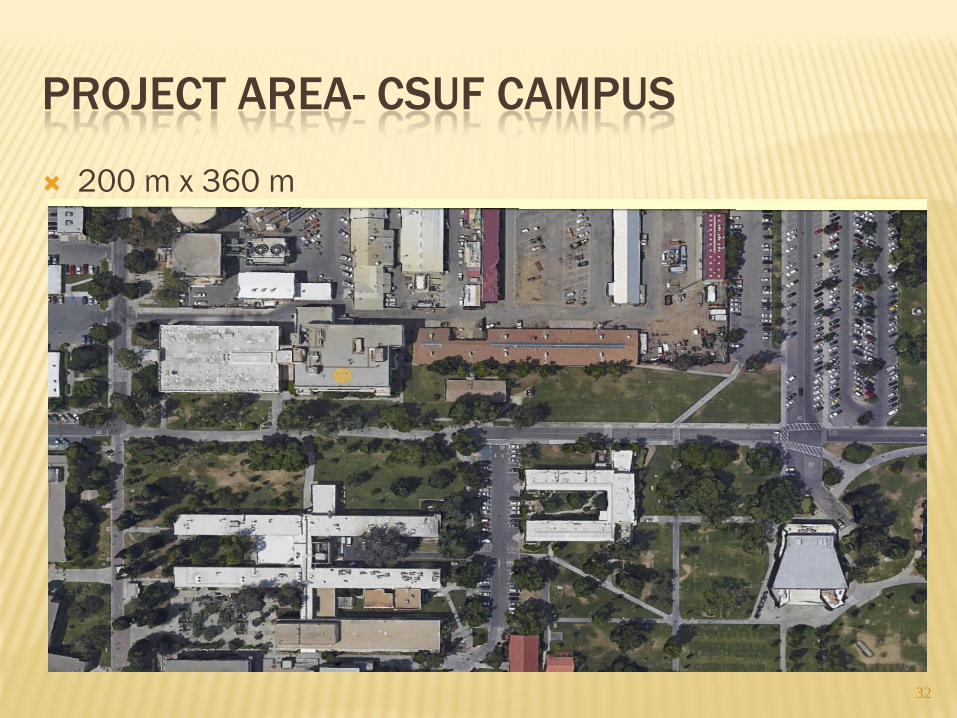
PROJECT AREA- CSUF CAMPUS
200 m x 360 m
32
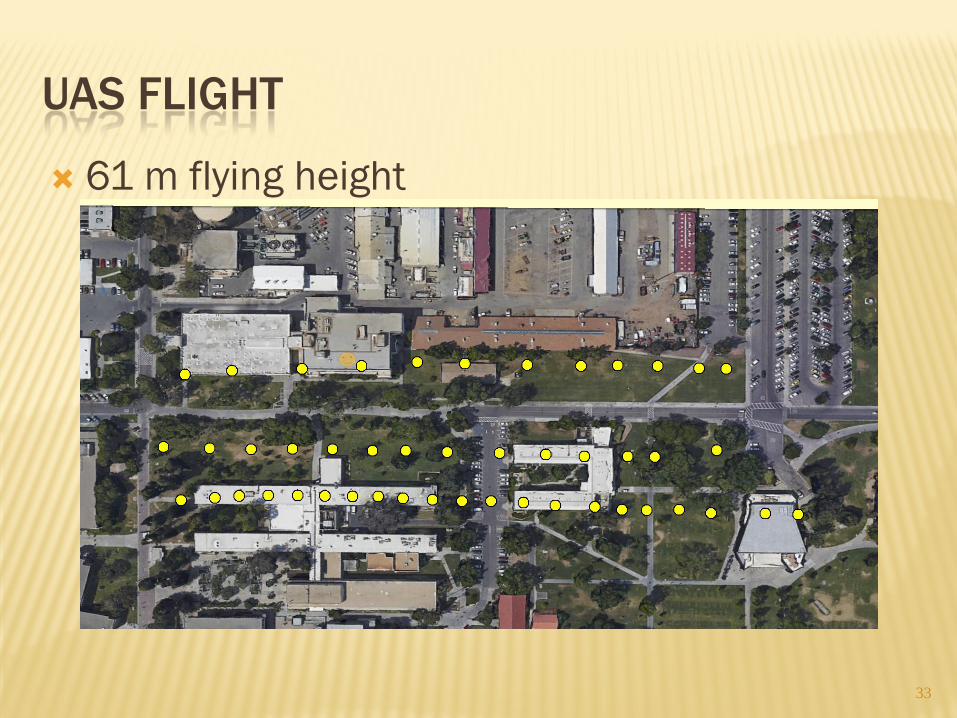
UAS FLIGHT
61 m flying height
33
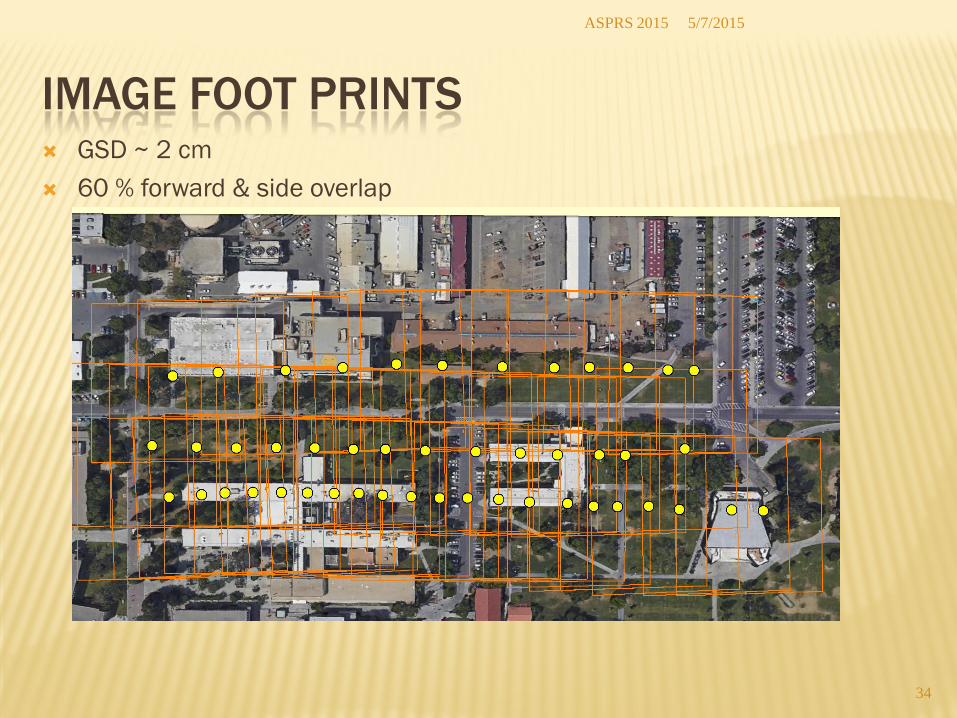
IMAGE FOOT PRINTS GSD ~ 2 cm 60 % forward & side overlap
5/7/2015 ASPRS 2015
34
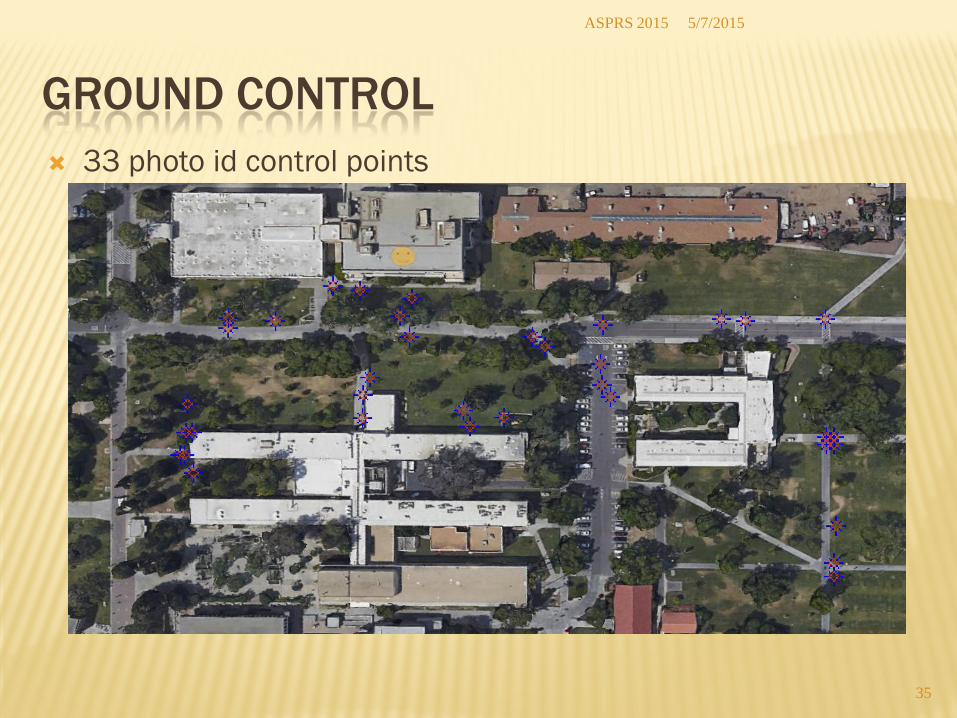
GROUND CONTROL 33 photo id control points
5/7/2015 ASPRS 2015
35
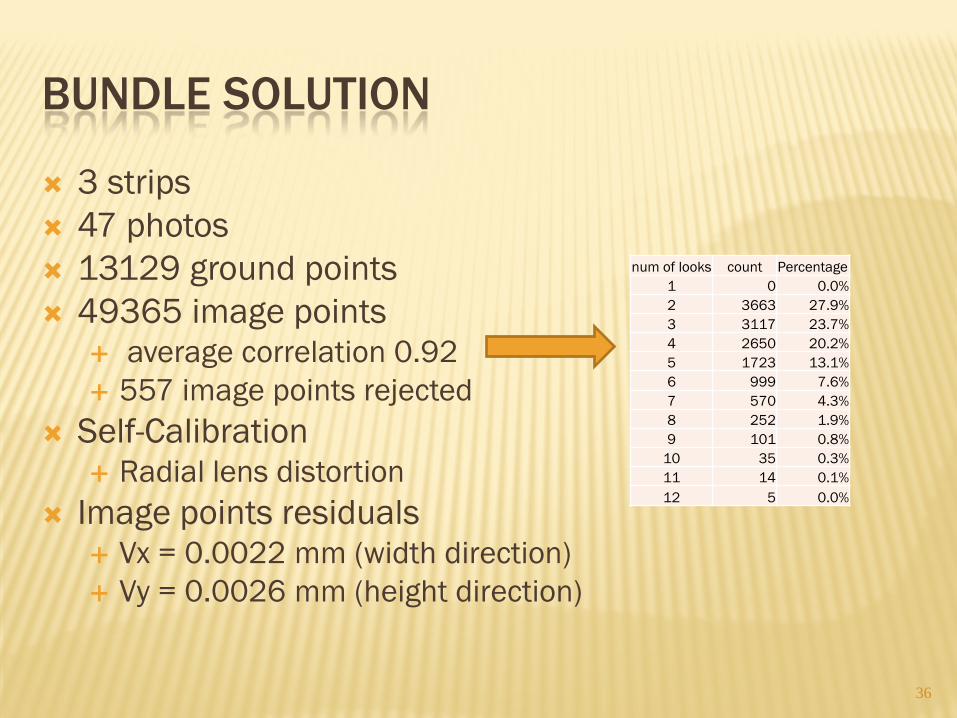
BUNDLE SOLUTION
3 strips 47 photos 13129 ground points 49365 image points
average correlation 0.92 557 image points rejected
Self-Calibration Radial lens distortion
Image points residuals Vx = 0.0022 mm (width direction) Vy = 0.0026 mm (height direction)
36
num of looks count Percentage 1 0 0.0% 2 3663 27.9% 3 3117 23.7% 4 2650 20.2% 5 1723 13.1% 6 999 7.6% 7 570 4.3% 8 252 1.9% 9 101 0.8%
10 35 0.3% 11 14 0.1% 12 5 0.0%
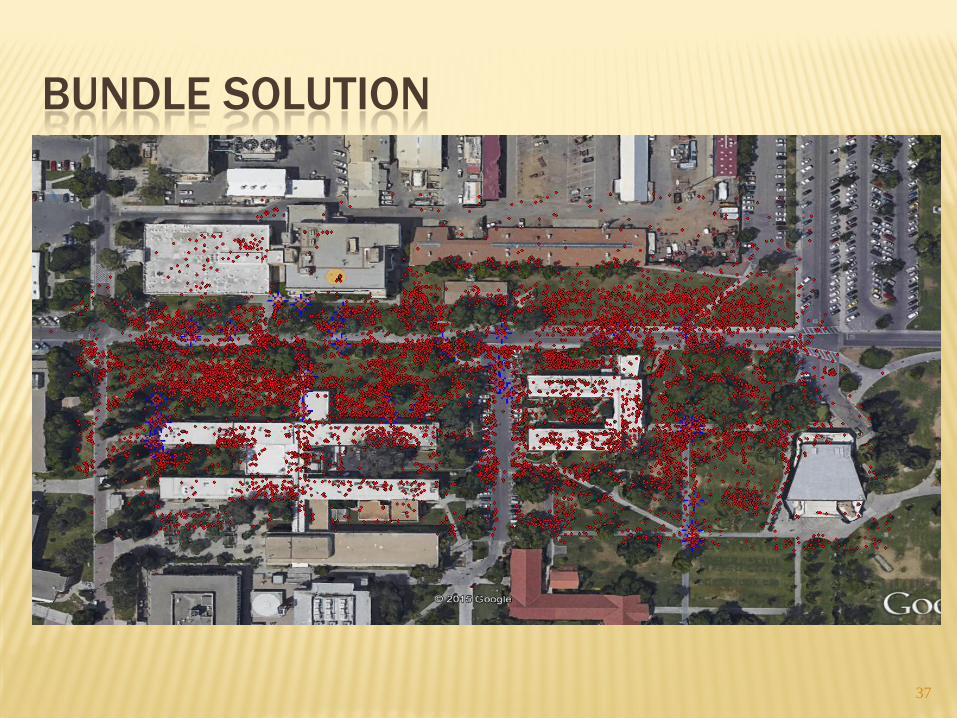
BUNDLE SOLUTION
37
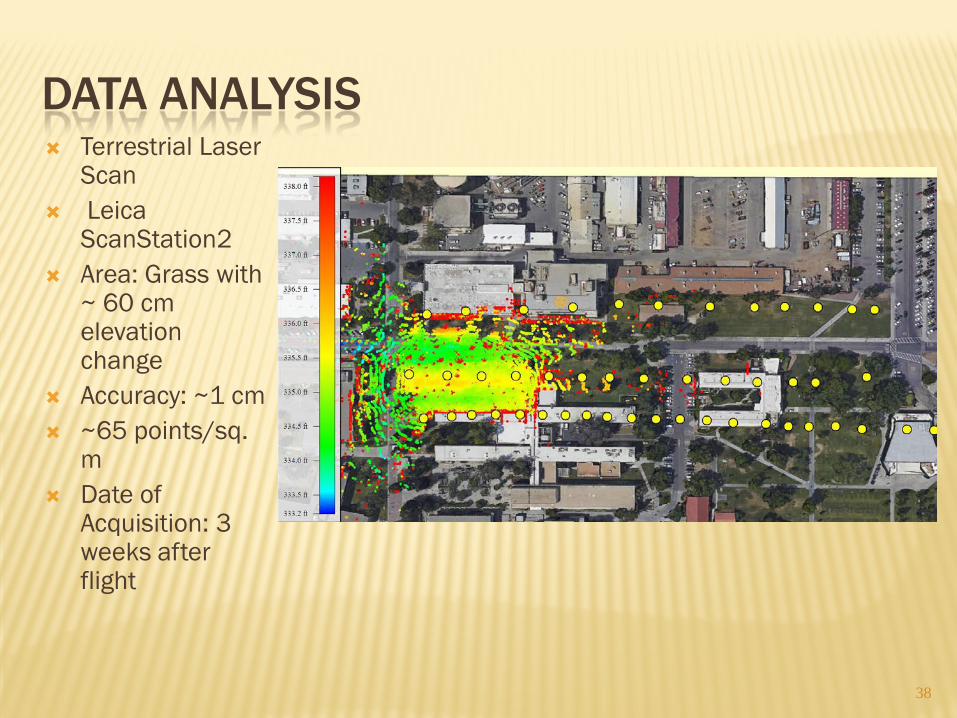
DATA ANALYSIS Terrestrial Laser
Scan Leica
ScanStation2 Area: Grass with
~ 60 cm elevation change
Accuracy: ~1 cm ~65 points/sq.
m Date of
Acquisition: 3 weeks after flight
38
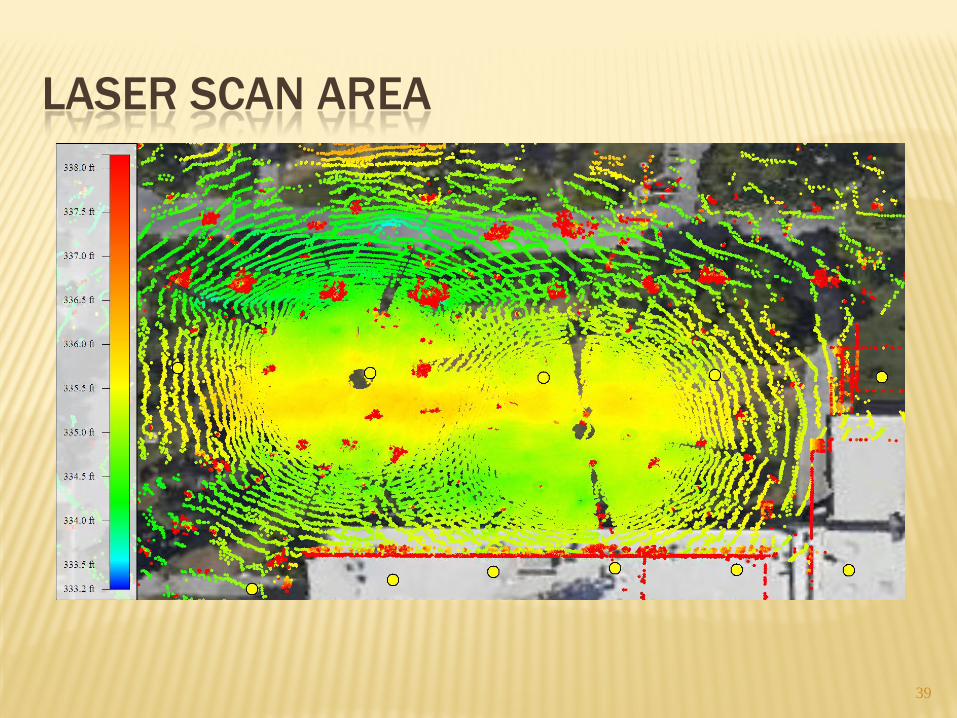
LASER SCAN AREA
39
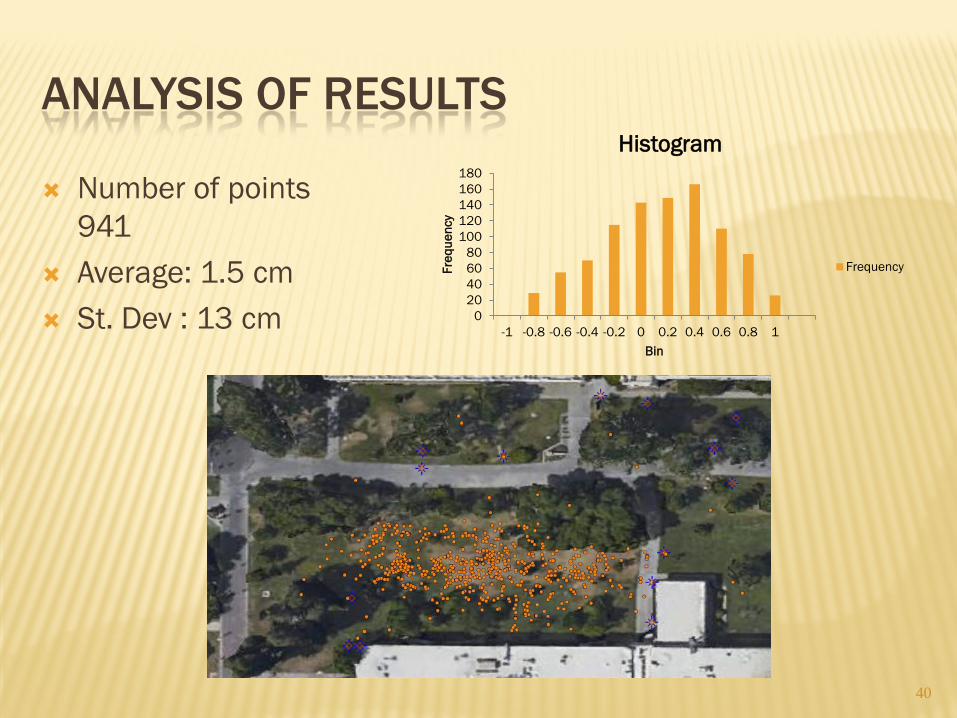
ANALYSIS OF RESULTS
Number of points 941
Average: 1.5 cm St. Dev : 13 cm
40
0 20 40 60 80
100 120 140 160 180
-1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1
Freq
uenc
y
Bin
Histogram
Frequency
UAS MAPPING PROJECT THREE
41
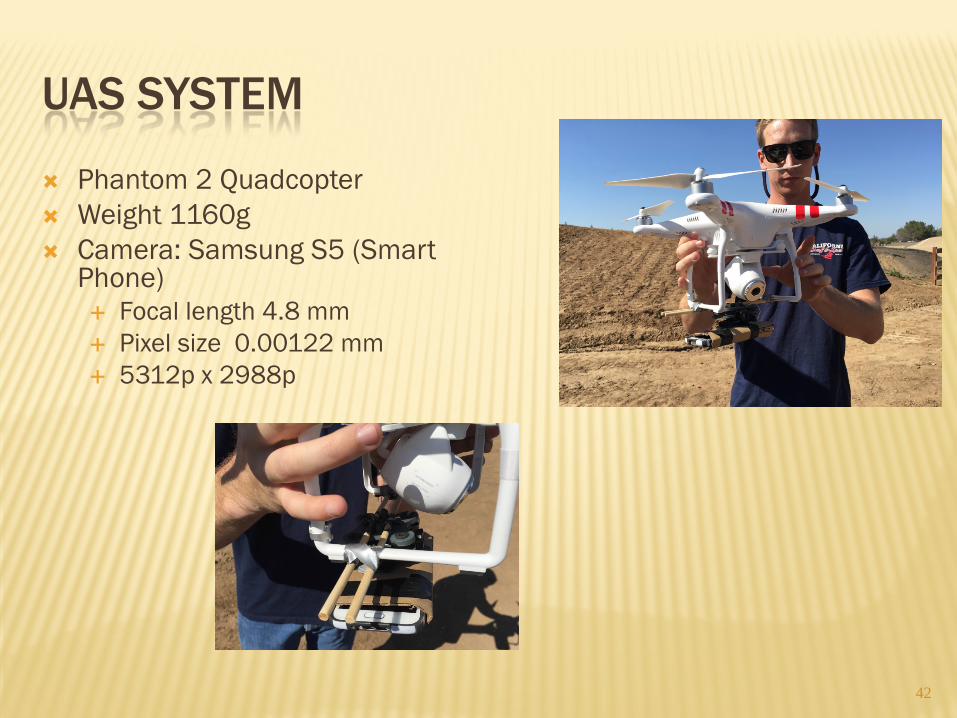
UAS SYSTEM
Phantom 2 Quadcopter Weight 1160g Camera: Samsung S5 (Smart
Phone) Focal length 4.8 mm Pixel size 0.00122 mm 5312p x 2988p
42
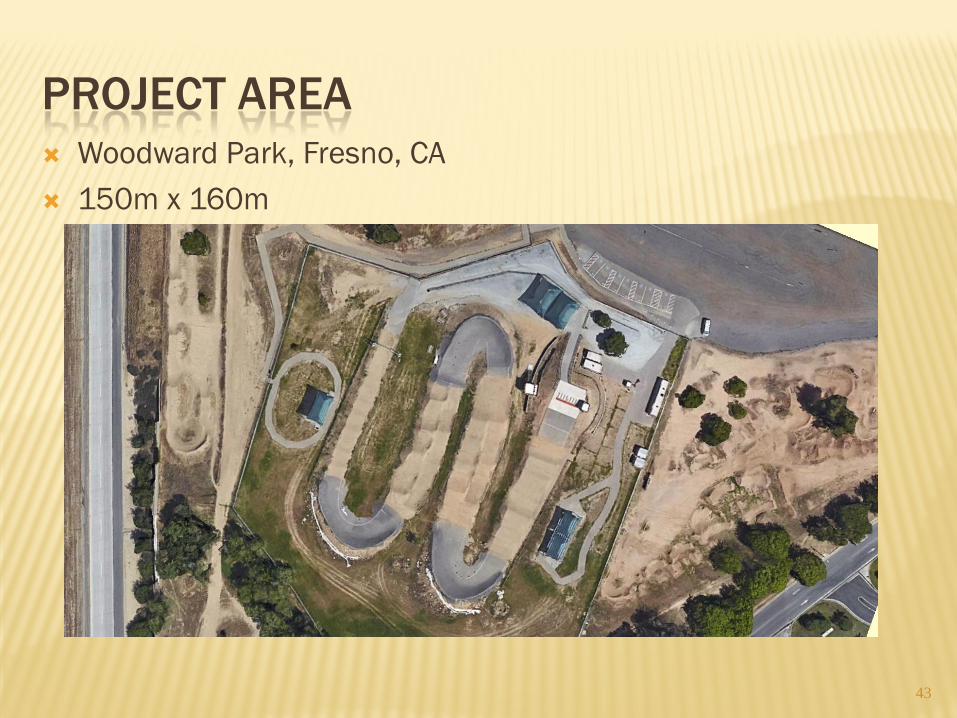
PROJECT AREA Woodward Park, Fresno, CA 150m x 160m
43
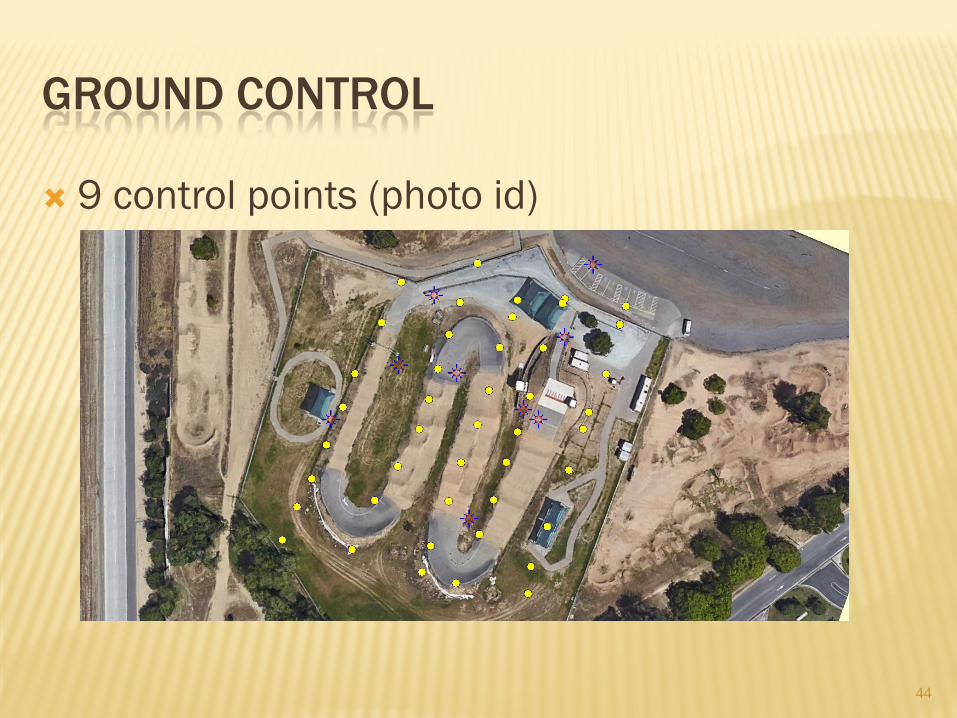
GROUND CONTROL
9 control points (photo id)
44
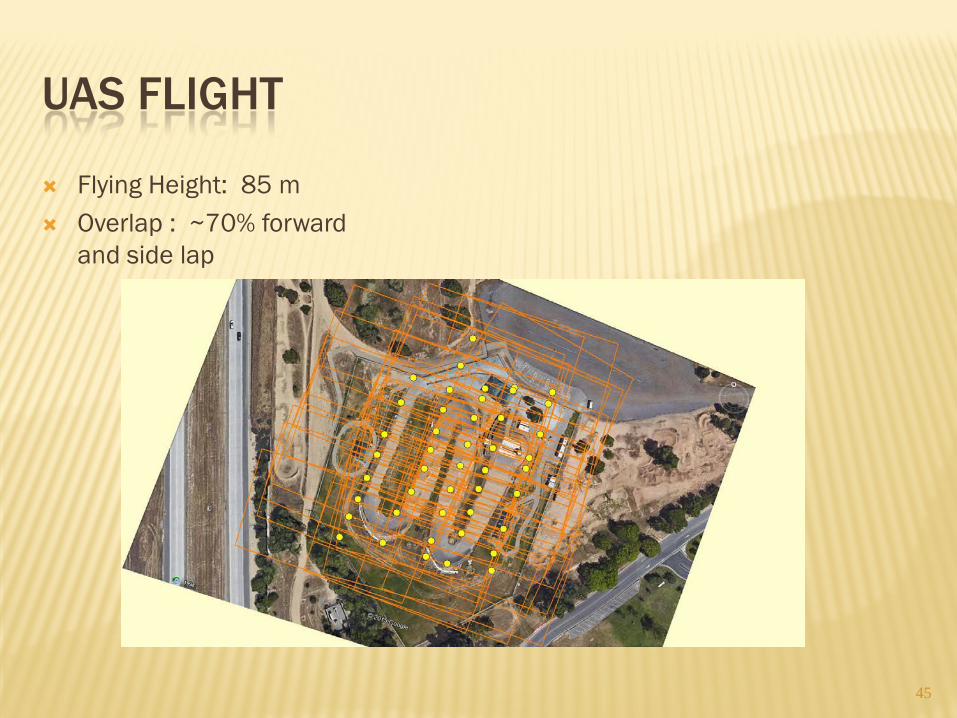
UAS FLIGHT
Flying Height: 85 m Overlap : ~70% forward
and side lap
45
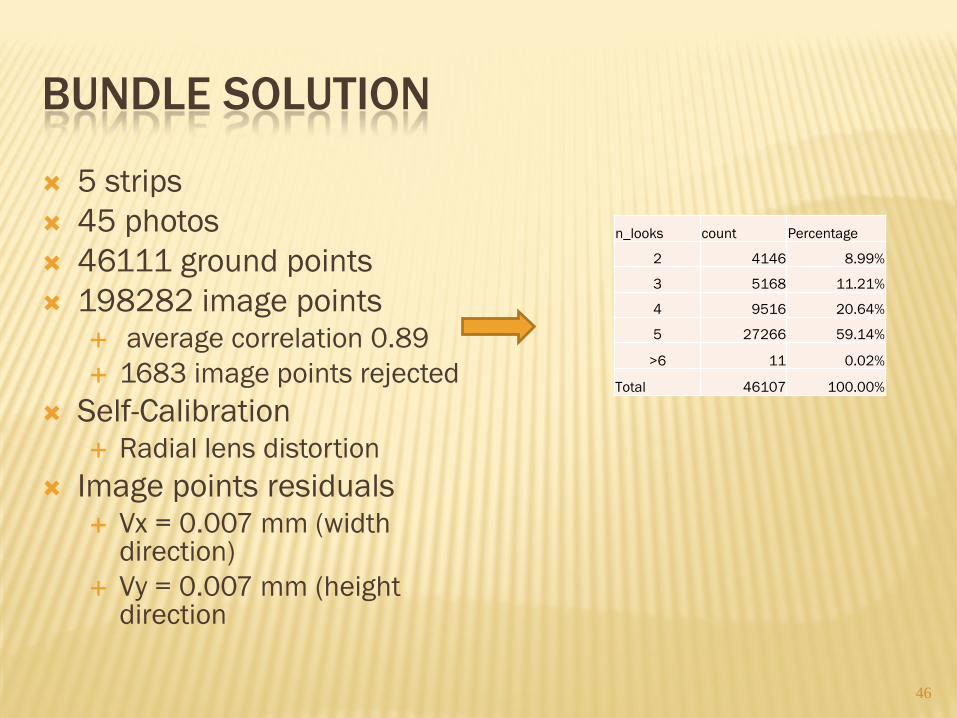
BUNDLE SOLUTION
5 strips 45 photos 46111 ground points 198282 image points
average correlation 0.89 1683 image points rejected
Self-Calibration Radial lens distortion
Image points residuals Vx = 0.007 mm (width
direction) Vy = 0.007 mm (height
direction
46
n_looks count Percentage
2 4146 8.99%
3 5168 11.21%
4 9516 20.64%
5 27266 59.14%
>6 11 0.02%
Total 46107 100.00%
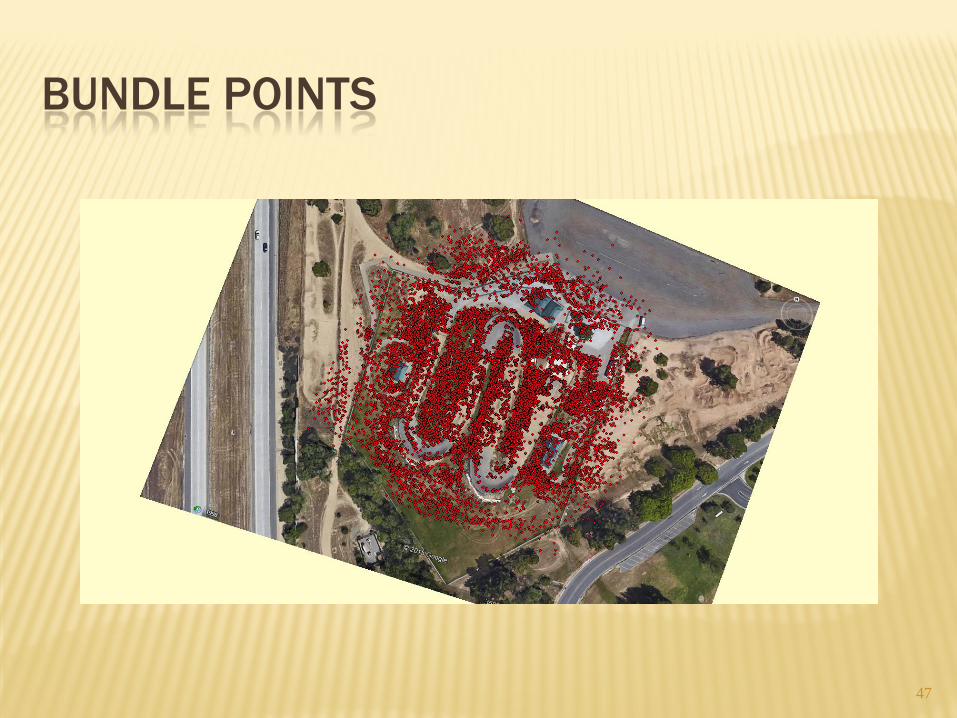
BUNDLE POINTS
47
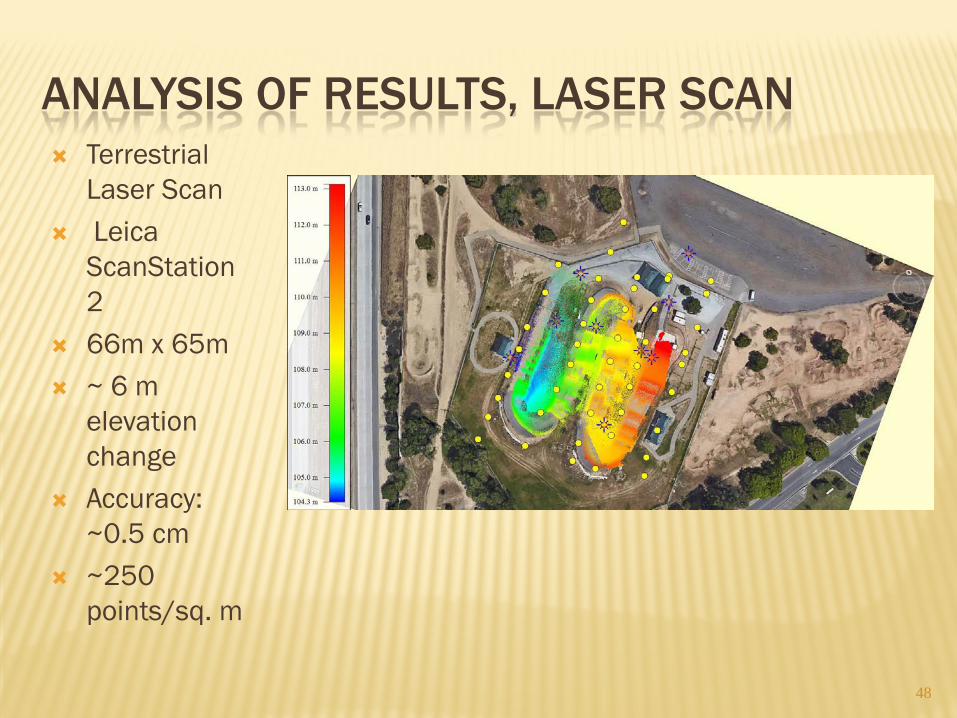
ANALYSIS OF RESULTS, LASER SCAN Terrestrial
Laser Scan Leica
ScanStation2
66m x 65m ~ 6 m
elevation change
Accuracy: ~0.5 cm
~250 points/sq. m
48
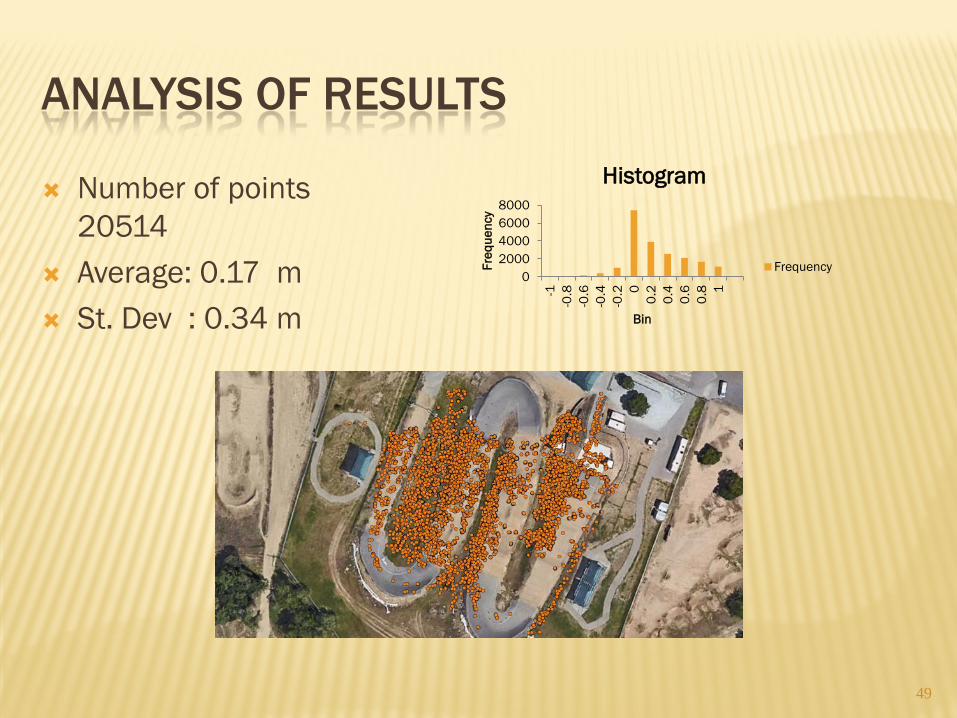
ANALYSIS OF RESULTS
49
Number of points 20514
Average: 0.17 m St. Dev : 0.34 m
0 2000 4000 6000 8000
-1
-0.8
-0
.6
-0.4
-0
.2 0
0.2
0.4
0.6
0.8 1
Freq
uenc
y
Bin
Histogram
Frequency
CONCLUSION
Without good Airborne GPS data, enough ground points need to be provided around and inside the block
It is highly recommended to minimize the camera vibration during flight. This will affect the matching and the final results
UAS photogrammetry can provide acceptable results if planned correctly
50
Thank you Questions
????