general electrical drives what is electrical drives? components of electrical drives advantages of...
TRANSCRIPT

GENERAL ELECTRICAL DRIVES
What is electrical drives?Components of electrical drivesAdvantages of electrical drives
DC drives Vs AC drivesTorque equationsLoad torque profilesFour quadrant operation

DC DRIVES Vs AC DRIVES
DC drives:
Advantage in control unit
Disadvantage in motor
AC Drives:
Advantage in motor
Disadvantage in control unit

• DC DRIVES: Electric drives that use DC motors as the prime movers
• Dominates variable speed applications before PE converters were introduced
• DC motor: industry workhorse for decades
• Will AC drive replaces DC drive ?
– Predicted 30 years ago
– AC will eventually replace DC – at a slow rate
– DC strong presence – easy control – huge numbers
DC DRIVES

DC Motors
• Limitations:
• Advantage: simple torque and speed control without sophisticated electronics
• Regular Maintenance • Expensive motor
• Heavy motor • Sparking

General Torque EquationTranslational (linear) motion:
dt
dJT
Rotational motion:
dt
dvMF
F : Force (Nm)M : Mass (Kg )v : velocity (m/s)
T : Torque (Nm)J : Moment of Inertia (Kgm2 ) : angular velocity ( rad/s )

Torque Equation: Motor drives
dt
dJTTor
dt
dJTT LeLe
0 Le TT Acceleration
0 Le TT Deceleration
0 Le TT Constant speed
Te : motor torque (Nm) TL : Load torque (Nm)
…continue
Drive accelerates or decelerates depending on whether Te is greater or less than TL
During acceleration, motor must supply not onlythe load torque but also dynamic torque, ( Jd/dt ).
During deceleration, the dynamic torque, ( Jd/dt ), hasa negative sign. Therefore, it assists the motortorque, Te.

Torque Equation: Graphical
Te
Forwardrunning
Speed
Forwardbraking
Reverseacc.
Reverserunning
Reversebraking
Forwardacc.

Load Torque
Load torque, TL, is complex, depending on applications.
SPEED
TORQUE
TL = k2TL = k
TL = k
In general:
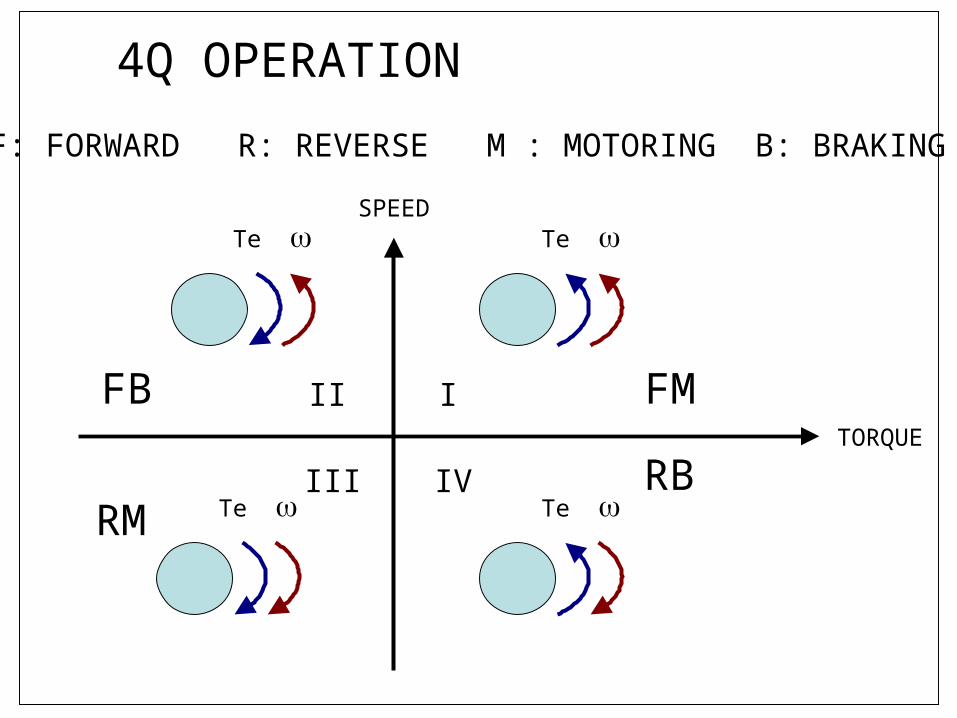
4Q OPERATION
SPEED
TORQUE
I
III
II
IV
TeTe
Te Te
FMFB
RMRB
F: FORWARD R: REVERSE M : MOTORING B: BRAKING

4Q OPERATION: LIFT SYSTEM
Counterweight Cage
Motor
Positive speed
Negative torque

4Q OPERATION: LIFT SYSTEM
Convention:
Upward motion of the cage: Positive speed
Weight of the empty cage < Counterweight
Weight of the full-loaded cage > Counterweight
Principle:
What causes the motion?
Motor : motoring P =T= +ve
Load (counterweight) : braking P =T = -ve

4Q OPERATION: LIFT SYSTEM
You are at 10th floor, callingfully-loaded cage from gnd floor
You are at gnd floor, callingempty cage from 10th floor
You are at 10th floor, callingempty cage from gnd floor
You are at gnd floor, callingFully-loaded cage from 10th floor
Torque
Speed
FMFB
RM RB
DC MOTOR DRIVES
Principle of operation
Torque-speed characteristic
Methods of speed control
Armature voltage control
Variable voltage source
Phase-controlled Rectifier
Switch-mode converter (Chopper)
1Q-Converter
2Q-Converter
4Q-Converter

Current in
Current out
Stator: field windings
Rotor: armature windings
Principle of Operation
DC Motors

Equivalent circuit of DC motor
at ikTe Electromagnetic torque
Ea ke Armature back e.m.f.
Lf Rf
if
aa
aat edtdi
LiRv
+
ea
_
LaRa
ia+
Vt
_
+
Vf
_
dtdi
LiRv ffff

Torque-speed characteristics
aaaa EIRV In steady state,
T
ae
T
a
k
VT
k
R 2
Therefore speed is given by,
Three possible methods of speed control:
Armature resistance RaField flux Armature voltage Va
aa
aaa edt
diLiRV
Armature circuit:

Torque-speed characteristics of DC motor
Torque
Speed
MaximumloadTorque
No load speed
Separately excited DC motors have goodspeed regulation.
Full load speed
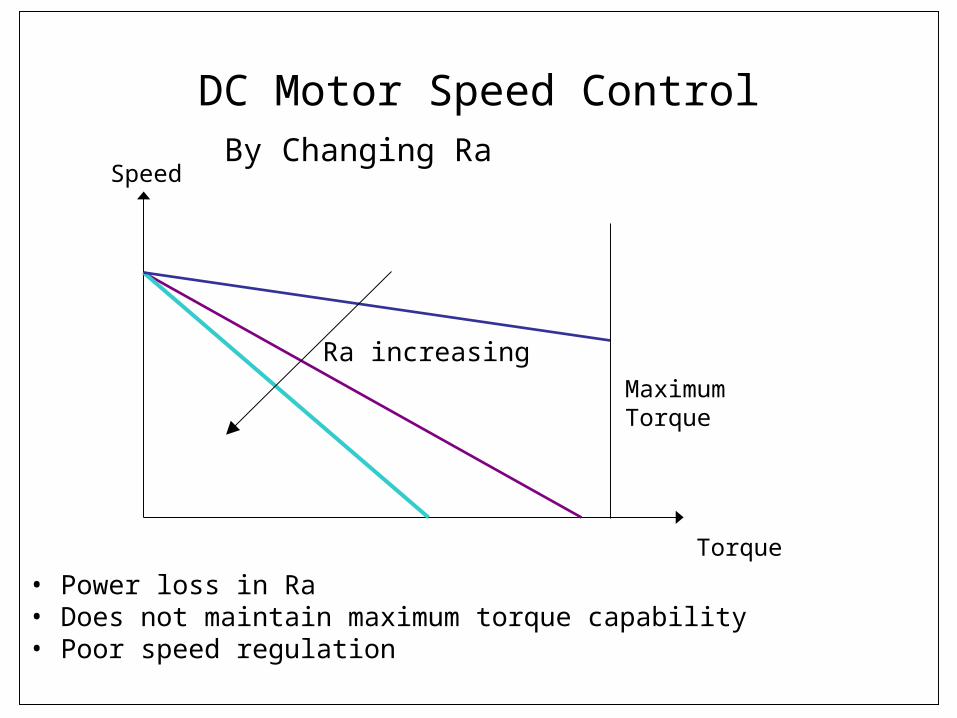
DC Motor Speed Control
Torque
Speed
MaximumTorque
By Changing Ra
Ra increasing
• Power loss in Ra• Does not maintain maximum torque capability• Poor speed regulation

DC Motor Speed Control
Torque
Speed
MaximumTorque
Flux Decreasing
Trated
• Slow transient response• Does not maintain maximum torque capability
By Decreasing Flux
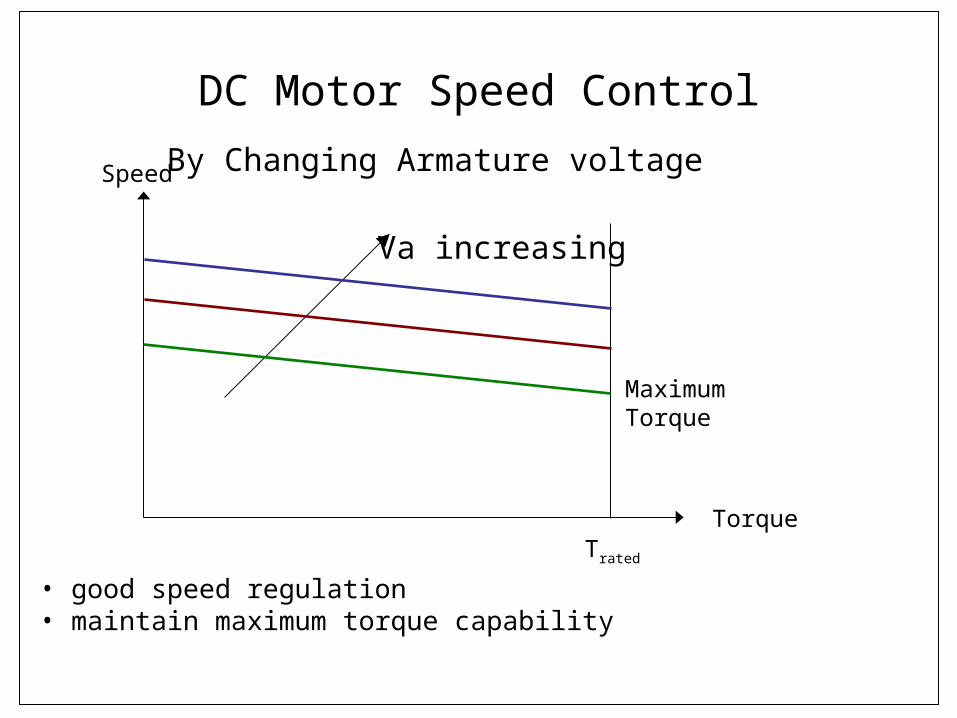
DC Motor Speed Control
Torque
Speed
MaximumTorque
By Changing Armature voltage
Trated
Va increasing
• good speed regulation• maintain maximum torque capability
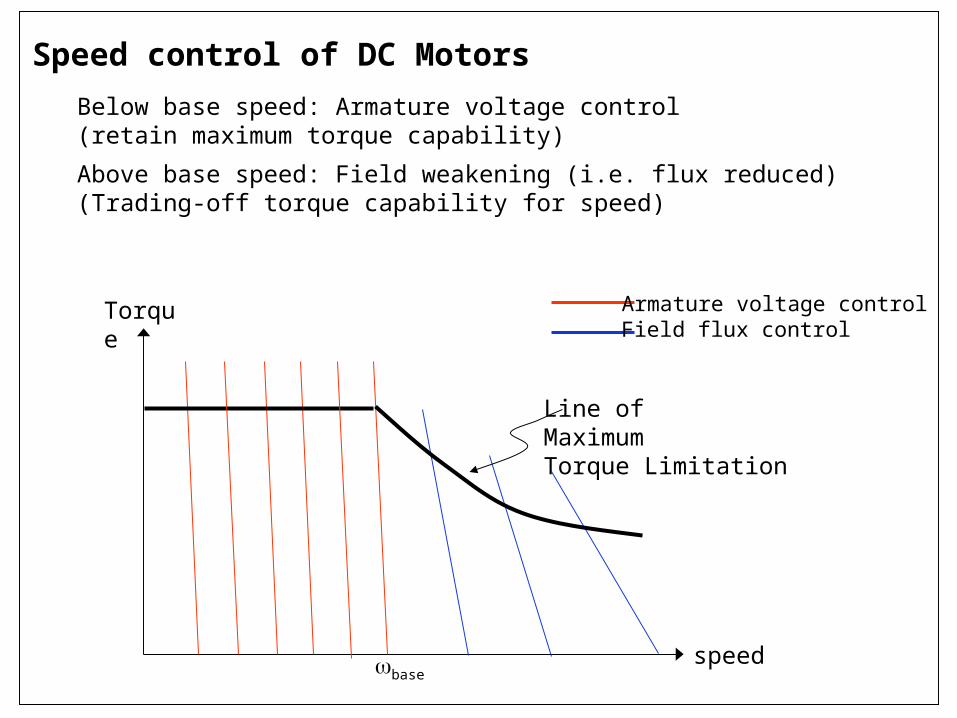
Speed control of DC Motors
Below base speed: Armature voltage control (retain maximum torque capability)
Above base speed: Field weakening (i.e. flux reduced) (Trading-off torque capability for speed)
Torque
speed
Line of MaximumTorque Limitation
Armature voltage controlField flux control
base
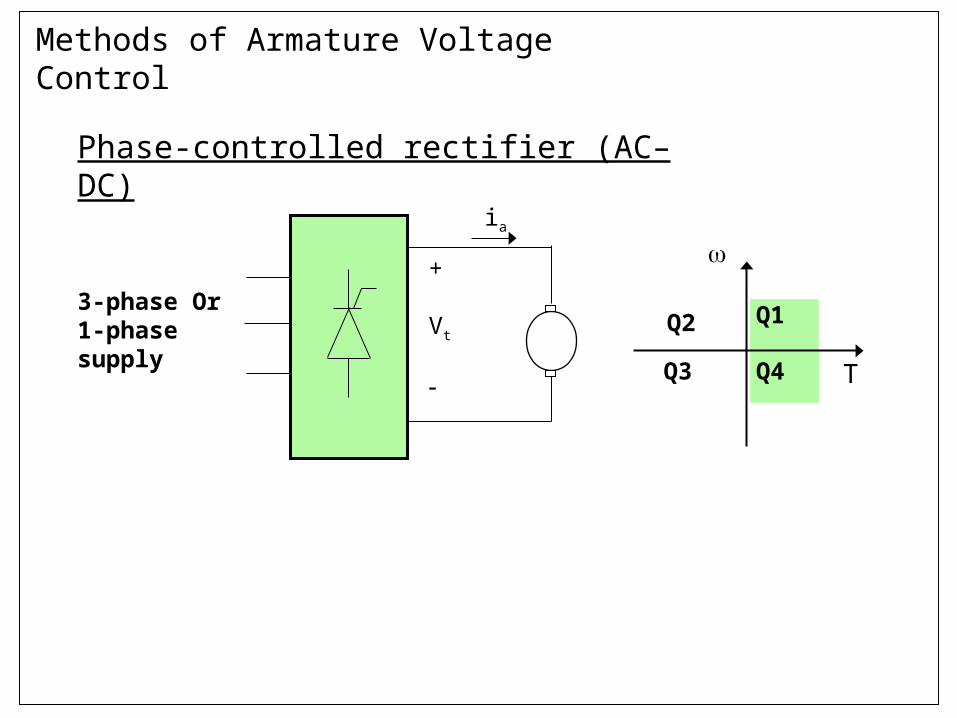
Methods of Armature Voltage Control
Phase-controlled rectifier (AC–DC)
T
Q1Q2
Q3 Q4
3-phase Or 1-phasesupply
+
Vt
ia

Methods of Armature Voltage Control
1. Ward-Leonard Scheme2. Phase-controlled rectifier (AC–DC)3. Switch-Mode Converter (Chopper) (DC–DC)

Phase-controlled rectifier: 4Q Operation
Q1Q2
Q3 Q4
T
1 or 3-phasesupply
1 or 3-phasesupply
+
Vt
Methods of Armature Voltage Control

Phase-controlled rectifier : 4Q Operation
Q1Q2
Q3 Q4
T
F1
F2
R1
R2+ Va -
3-phasesupply
AN ALTERNATIVE WAY
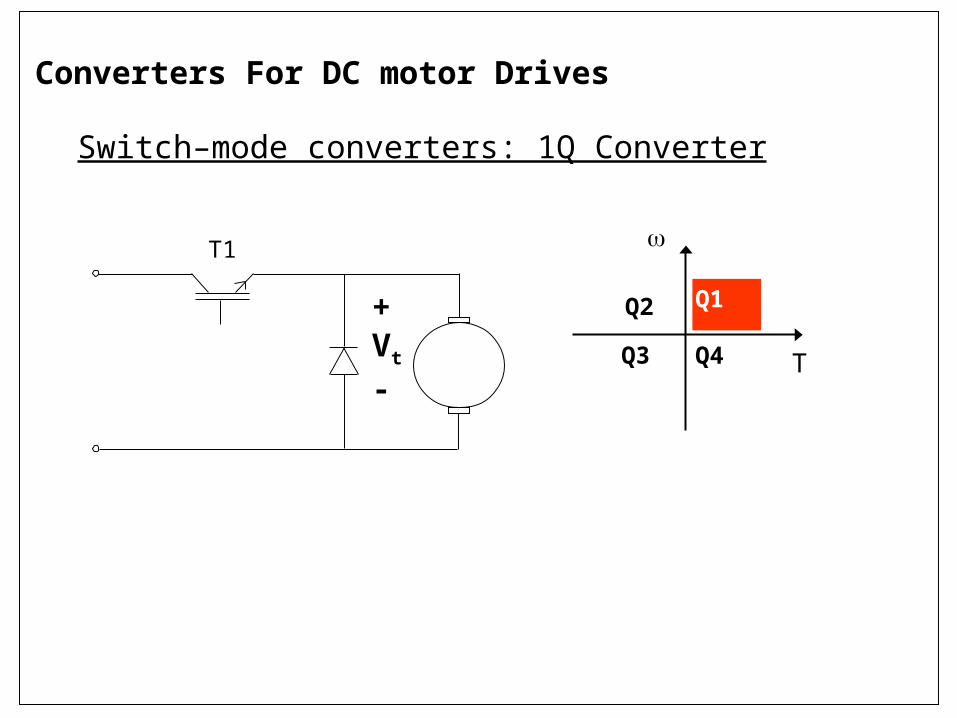
Switch–mode converters: 1Q Converter
Q1Q2
Q3 Q4
T
+Vt
-
T1
Converters For DC motor Drives

Switch–mode converters: 2Q Converter
+Vt
-
T1D1
T2
D2
Q1Q2
Q3 Q4
T
Q1 T1 and D2
Q2 D1 and T2
Converters For DC motor Drives

Switch–mode converters: 4Q Converter
Q1Q2
Q3 Q4
T+ Vt -
T1D1
T2D2
D3
D4
T3
T4
Converters For DC motor Drives
Switch–mode converters
• Switching at high frequency
Reduces current ripple
Increases control bandwidth
• Suitable for high performance applications
Advantages of Switch mode converters