gabriel caetano da silva - livros grátislivros01.livrosgratis.com.br/cp021254.pdf · de polímeros...
TRANSCRIPT

UNIVERSIDADE DO ESTADO DO RIO DE JANEIRO INSTITUTO POLITÉCNICO – IPRJ
Pós-Graduação em Modelagem Computacional
ESTIMAÇÃO DO ESPECTRO DE RELAXAÇÃO DE POLÍMEROS
ATRAVÉS DO ALGORITMO SIMULATED ANNEALING
Gabriel Caetano da Silva
Nova Friburgo, RJ – Brasil Agosto de 2006

Livros Grátis
http://www.livrosgratis.com.br
Milhares de livros grátis para download.

Gabriel Caetano da Silva
ESTIMAÇÃO DO ESPECTRO DE RELAXAÇÃO DE POLÍMEROS
ATRAVÉS DO ALGORITMO SIMULATED ANNEALING
.
Dissertação de Mestrado apresentada à Universidade
do Estado do Rio de Janeiro para obtenção do título
de Mestre em Modelagem Computacional do curso
de Pós-Graduação Stricto Sensu.
Orientadores: Marisa Cristina Guimarães Rocha
Gustavo Mendes Platt
ii

Dedico esta dissertação a meu pai (in memorian), sábio eterno, que certamente está “tirando um som” lá de cima, e a minha mãe querida, que me deu todo suporte emocional nos momentos mais difíceis e desesperadores desta jornada.
iii

“Quem sabe cala,
Quem não sabe é quem mais fala”
Banda Ponto de Equilíbrio
iv

AGRADECIMENTOS
Agradeço a todos que contribuíram para o desenvolvimento deste trabalho:
• À orientadora, Profa. Marisa Cristina Guimarães Rocha que coordenou
brilhantemente este trabalho.
• Ao orientador Prof. Gustavo Mendes Platt cuja colaboração na implementação
dos métodos numéricos foi imprescindível.
• Ao Prof. Nélio H. de Oliveira pela tranqüilidade e confiança que me passou e
certeza do sucesso deste trabalho.
• Aos colegas Jefferson Gomes e José Rufino de Oliveira que estiveram presentes
nos momentos em que mais precisei de ajuda, um agradecimento especial.
• À Engenheira Química Ana Lúcia Nazareth, do Centro de Pesquisa da Petrobras
– CENPES – pelo apoio e suporte técnico na conclusão desta dissertação.
• Ao Programa de Apoio Técnico da Uerj – PROATEC – pela bolsa de prestação
de serviços, que possibilitou minha estada em Nova Friburgo.
• Aos Laboratórios de Análises e Controle Ambiental – LACAm – e Tecnologia
de Polímeros – TecPoL – e seus respectivos funcionários, bolsistas e alunos de
Iniciação Científica/Extensão por toda compreensão .
• À minha família, amigos e todos demais colegas do Instituto Politécnico
presentes em minha vida acadêmica.
v

RESUMO
A determinação do espectro de relaxação de polímeros utilizando dados de
tensão oscilatória de baixa amplitude pode ser calculada assumindo-se que existe uma
única função contínua H(λ) capaz de descrever o comportamento viscoelástico linear. O
objetivo deste trabalho é determinar esta função ou uma aproximação da mesma
utilizando um algoritmo estocástico denominado “Simulated Annealing”. A estratégia
proposta é similar a proposta por Jensen (2002), entretanto, a lista de resfriamento do
algoritmo foi modificada, objetivando-se uma maior robustez do referido algoritmo. A
ferramenta computacional foi calibrada de forma a estimar com acurácia o espectro de
relaxação discreto de outros polímeros. Os métodos de interpolação lagrangeana e de
regressão não-linear foram aplicados para obter a função contínua do espectro de
relaxação, a partir de um conjunto discreto de dados. Os resultados obtidos para o
polietileno linear de baixa densidade (PELBD) comprovaram a eficiência da ferramenta
computacional de otimização, sendo extremamente próximos aos fornecidos pelo
reômetro AR 2000 (CENPES/PETROBRAS).
Palavras-chave: Reologia de Polímeros, espectro de relaxação, otimização
estocástica.
vi

ABSTRACT
The determination of the relaxation spectrum using data from small amplitude
oscillatory shear rate was accomplished by assuming that exists a unique continuous
function H(λ) which describes linear viscoelasticity. The aim of this work is to
determine this function or a close approximation using a computer stochastic algorithm
called “Simulated Annealing” (SA). The strategy is the same proposed by Jensen, but
the cooling schedule of SA algorithm was modified, in order to enhance the robustness
of the referred algorithm. Besides, a calibration procedure was conducted for estimate
accurate relaxation spectrum for other polymers. Lagrangean interpolation and
nonlinear regression techniques were applied in order to obtain the continuous function
that represent relaxation spectrum, using discrete data. The results generated for low
linear density polyethylene (LLDPE) indicate the efficiency of the optimization
computational tool, being extremely close to that produced by AR 2000 rheometer
(CENPES/PETROBRAS).
Keywords: Polymer rheology, relaxation spectrum, stochastic optimization.
vii

NOMENCLATURA
Reologia de Polímeros
σ - tensão de cisalhamento
σ0 - tensão de cisalhamento inicial
G – módulo elástico em cisalhamento
Gm – módulo elástico em cisalhamento para o modelo de Maxwell
Gv – módulo elástico em cisalhamento para o modelo de Voight
γ - deformação em cisalhamento
e – deformação em tensão
V – Velocidade
y – direção do gradiente de velocidade
η - viscosidade
ηm – viscosidade para o modelo de Maxwell
u – deslocamento na direção x
v – deslocamento na direção y
J(t) – compliância em ‘creep’
λ’ – tempo de retardação
λ - tempo de relaxação
G(t) – módulo de relaxação sob tensão
GU – módulo de relaxação sob tensão ‘não relaxado’
viii

GR – módulo de relaxação sob tensão em equilíbrio.
Algoritmo Simulated Annealing
f – função de aceitação
N – Número Total de ajustes de Parâmetros
NS – Número Máximo de Ciclos
NT – Número Máximo de Iterações antes da RT
T0 – Temperatura Inicial
RT – Fator de Redução de Temperatura
EPS – Erro de Tolerância para o Término do Algoritmo
LB – Limite Inferior para os Parâmetros
UB – Limite Superior para os Parâmetros
Algoritmo de Busca Aleatória
*x – ótimo valor corrente
Z – matriz diagonal com elementos aleatórios entre -1,0 e +1,0
r – vetor contendo os raios das regiões de busca para as variáveis do problema.
ix

LISTA DE FIGURAS
Figura 1.1 – Formas de relaxação de tensões de uma macromolécula
Figura 2.1 – Carga aplicada ao longo do tempo (ciclo carga-tempo)
Figura 2.2 – Resposta da Deformação em função do tempo para comportamento de um sólido elástico ideal.
Figura 2.3 – Resposta da deformação em função do tempo para comportamento viscoso
Figura 2.4 – Resposta da deformação em função do tempo para comportamento viscoelástico
Figura 2.5 – Deformação de um sólido elástico e de um sólido viscoelástico linear
Figura 2.6 – A compliância em “creep” como uma função do tempo.
Figura 2.7 – O Módulo da Relaxação Sob Tensão G(t) em função do tempo
Figura 2.8 – Comportamento de “creep” de um sólido viscoelástico linear
Figura 2.9 – O Modelo de Maxwell
Figura 2.10 – O modelo de Kelvin ou Voight
Figura 2.11 – Solução do Modelo de Zener - Curvas de G(t) e J(t) versus log t
Figura 2.12 – Variação da Compliância J(t) em função do log do tempo, para o Polietileno Linear, em diferentes temperaturas. Figura 2.13 – O modelo de Zener Generalizado para Ensaios de Relaxação sob Tensão
Figura 2.14 – Fluxo Oscilatório em Cisalhamento
Figura 2.15 – O módulo Complexo
x

Figura 3.1 – O problema de otimização
Figura 4.1 – Estrutura simplificada do algoritmo SA em Código em Fortran-77 (adaptado de Jensen, 2002).
Figura 5.1 – Validação do Método de Otimização
Figura 5.2 – Relação do Desvio Padrão com o Número de Modelos de Maxwell
Figura 5.3 – Variação da Função-objetivo em função do número de modelos de Maxwell Figura 5.4 – Gráfico Comparativo da medida de valores de G’ e G’’ em função da freqüência. Figura 5.5 – Espectro de Relaxação do LLDPE (contínuo e discreto).
Figura 5.6 – Espectro de Relaxação Contínuo do LLDPE, obtido por interpolação lagrangeana. Figura 5.7 – Comparação dos Espectros de Relaxação Contínuos entre a metodologia deste trabalho e software comercial da TA Instruments. Figura 5.8 – Ajuste do Espectro Contínuo com 7 Modelos de Maxwell.
Figura 5.9 – Ajuste do Espectro Contínuo com 6 Modelos de Maxwell
Figura 5.10 – Ajuste do Espectro Contínuo com 7 Modelos de Maxwell (em escala logarítmica). Figura 5.11 – Ajuste do Espectro Contínuo com 6 Modelos de Maxwell (em escala
logarítmica)
xi

LISTA DE TABELAS
Tabela 3.1 – Resultados G’(ϖ ) e G’’(ϖ) para o LLDPE
Tabela 4.1 – Variáveis utilizadas no Algoritmo AS.
Tabela 5.1 – Melhores Valores da Lista de resfriamento Tabela 5.2 – Variação da função objetivo com o Número de Modelos de Maxwell.
Tabela 5.3 – Parâmetros ótimos encontrados para calibração do método.
Tabela 5.4 – Dados do LLDPE gerados pelo AR 2000.
Tabela 5.5 – Parâmetros ótimos encontrados para o LLDPE
xii

SUMÁRIO
Capítulo 1 – Introdução 01
Capítulo 2 – Introdução à Reologia de Polímeros 09
2.1 – Conceito de Viscoelasticidade 09
2.2 – Comportamento Viscoelástico Linear 13
2.2.1 – Fluência Viscoelástica (CREEP) 15
2.2.2 – Relaxação sob Tensão 19
2.3 – Tratamento Matemático do Comportamento Viscoelástico Linear 21
2.3.1 – O Modelo de Maxwell 24
2.3.2 – O Modelo de Kelvin ou Voight 27
2.3.3 – O Modelo de Zener 29
2.4 – O Modelo de Zener Aplicado à Ensaios de Creep 34
2.5 – O Modelo de Zener Aplicado à Ensaios de Relaxação sob Tensão 36
2.6 – O Modelo de Zener Generalizado 40
2.7 – Propriedades Reológicas em Regime Oscilatório 44
2.7.1 – Módulo de Estocagem G’ e Módulo de Perda G’’ 44
2.7.2 – O Modelo de Zener em função da Freqüência 48
Capítulo 3 – Formulação do Problema de Otimização 55
3.1. O Problema de Otimização 55
xiii

Capítulo 4 – Métodos Numéricos Utilizados 60
4.1. O Algoritmo Sumulated Annealing 60
4.1.1. Analogia com o Processo Físico de Annealing 61
4.1.2. Convergência Assintótica do Algoritmo Simulated Annealing 62
4.1.3. Utilizando o Algoritmo Simulated Annealing 62
4.2. Métodos de Busca Aleatória 66
4.3. Interpolação Polinomial 67
Capítulo 5 – Resultados e Discussões 72
5.1. Validação do Método 72
5.2. Aplicação da Ferramenta Computacional 79
5.3. Obtenção do Espectro Contínuo a partir do Espectro Discreto 83
5.3.1. Interpolação Lagrangeana 83
5.3.2. Regressão não Linear / Estimação de Parâmetros 85
Capítulo 6 – Conclusões e Sugestões para Trabalhos Futuros 90
6.1. Conclusões 90
6.2. Sugestões para Trabalhos Futuros 91
Referências Bibliográficas 92
ANEXO 96
xiv
CAPÍTULO 1
INTRODUÇÃO
O processamento convencional de polímeros é afetado diretamente pelas
propriedades reológicas no estado fundido. A reologia é a ciência que estuda o
escoamento de um fluido quanto submetido a uma força. O escoamento e a deformação
dos fluidos durante o processamento têm um papel muito importante nas propriedades
finais do produto, especialmente no caso de polímeros, metais e cerâmicas. O
conhecimento das propriedades reológicas é, portanto, essencial para obter produtos
com propriedades desejáveis assim como para o projeto dos equipamentos utilizados no
processamento dos materiais (Callister, 2002).
Durante o processo de extrusão, por exemplo, o polímero sofre cisalhamento no
interior da extrusora e elongação no início da matriz, o que provoca o aparecimento de
tensões normais e, conseqüentemente, o fenômeno de inchamento do extrusado. Na
moldagem por injeção também são observadas deformações de cisalhamento e
elongação em regime transiente no parafuso recíproco, além de cisalhamento elevado
dentro dos canais e cavidades dos moldes. Essas deformações podem provocar o
aparecimento e o armazenamento de tensões internas no artefato moldado ou defeitos
dimensionais na peça (Bretas, 2000).
A morfologia e, conseqüentemente, as propriedades mecânicas desses materiais e
de suas misturas são determinadas por estas deformações e tensões. Assim, torna-se
necessário conhecer o comportamento desses materiais quando em situações de fluxo,
para poder prever e compreender a sua estrutura final.
1

O espectro de relaxação é comumente utilizado na indústria de polímeros para
fornecer informações sobre o processamento destes materiais, uma vez que possibilita
uma descrição completa da dependência do comportamento reológico com o tempo, em
condições de altas deformações ou taxas de deformações. Como é bastante sensível a
pequenas variações estruturais, o espectro de relaxação pode ser utilizado também para
detectar pequenas diferenças entre materiais que a princípio poderiam ser considerados
indistinguíveis (Winter, 1996).
Na verdade, o fenômeno de relaxação de tensões pode ser visualizado em função
dos efeitos que os movimentos por alterações térmicas promovem na orientação das
moléculas poliméricas. Quando uma tensão mecânica é aplicada a um polímero,
introduzindo deformações nas cadeias, a entropia do sistema decresce, pois as
moléculas neste caso podem apenas se apresentar em um número menor de
conformações. Se a amostra for mantida neste estado deformado, a relaxação de tensões
ocorrerá como resultado do movimento das moléculas para retornar as conformações de
equilíbrio anteriores, sendo o excesso de energia livre dissipado como calor.
Os detalhes da relaxação de tensões dependem da multiplicidade de formas pelas
quais as moléculas podem recuperar suas conformações mais prováveis (mais estáveis)
por meio de movimentos térmicos. Estes movimentos complexos da molécula podem
ser expressos como uma série de modos característicos, que requerem vários graus de
cooperação de longo alcance entre os segmentos da cadeia. Uma primeira forma, por
exemplo, corresponderia à translação da molécula inteira, requerendo cooperação
máxima de toda a cadeia; uma segunda forma corresponderia aos movimentos dos
terminais de cadeia em direções opostas, requerendo menos cooperação e, assim por
diante, como pode ser visualizado na Figura 1.1 (Bretas, 2000).
2

Figura 1.1 – Formas de relaxação de tensões de uma macromolécula: a) tensionada; b) relaxando.
A cada uma dessas formas está associado um tempo de relaxação característico e,
como existem muitas formas possíveis de relaxação durante um intervalo de tempo, o
espectro discreto de tempos de relaxação pode ser aproximado por uma distribuição
contínua. Os segmentos que interagem a longa distância contribuem principalmente
para a resposta elástica do fluido polimérico, enquanto os de curto alcance contribuem
para a resposta viscosa do polímero. Sendo assim, a relaxação da molécula polimérica
durante o fluxo determinará a sua resposta a uma dada deformação ou tensão.
Os dados mecânicos dinâmicos contêm todas as informações necessárias para a
obtenção do espectro de relaxação, H(λ). A análise mecânica dinâmica fornece
informações sobre as propriedades reológicas em regime oscilatório ou dinâmico de
cisalhamento de pequena amplitude, ou seja, a tensão de cisalhamento (ou deformação)
aplicada varia com a freqüência.
Na verdade, quando um polímero é submetido a uma deformação oscilatória de
pequena amplitude, ou aplicada de forma suficientemente lenta, as conformações que
poderá apresentar não estarão distantes do equilíbrio, e as medidas ficarão dentro do
regime da viscoelasticidade linear (resposta composta de uma parte elástica e outra
viscosa). Assim a resposta mecânica é um reflexo do processo dinâmico a nível
molecular o qual muda constantemente para um sistema em equilibro. As tensões
resultantes oscilarão com a mesma freqüência ϖ, mas não estarão em fase com a
3

deformação. As propriedades em regime oscilatório podem ser obtidas, por exemplo,
em um fluxo entre placas paralelas, no qual uma das placas se movimenta de forma
oscilatória (Bretas, 2000).
Através desta técnica, como a tensão ou deformação resultante é determinada,
torna-se possível obter o módulo de armazenamento em cisalhamento (G’) e o módulo
de perda em cisalhamento (G’’) em função da freqüência (ϖ). O módulo de
armazenamento G’ está relacionado à componente em fase com a deformação e está
associado à contribuição elástica ou armazenamento de energia em cada ciclo; o módulo
de perda G’’ está associado à componente fora de fase com a deformação, ou seja, está
relacionado à contribuição viscosa ou dissipação de energia em cada ciclo. Estas
grandezas obtidas em uma faixa ampla de freqüências, maxmin ϖϖϖ ≤≤ (três décadas de
tempo ou mais), são definidas abaixo. Deve ser ressaltado que os sólidos apresentam
uma contribuição independente do tempo adicional, definido como o módulo em
equilíbrio G0 (Winter 1996).
λλ
ϖλϖλλϖ dHGG 22
22
00 1
)()('+
+= ∫∞
(1.1)
λλ
ϖλλϖλϖ dHG 22
0 1)()(''
+= ∫
∞
(1.2)
Experimentos na faixa de viscoelasticidade linear, como os de compliância em
creep e os de relaxação sob tensão, podem ser utilizados para a obtenção do espectro de
relaxação de polímero. Dados mais acurados, entretanto, são obtidos a partir da
determinação de G’ e G’’.
Para obter o espectro de relaxação a partir de dados de G’ e G’’ assume-se que há
uma única função contínua H(λ) capaz de descrever o comportamento viscoelástico
linear. Assume-se também que H(λ) é suficientemente contínua tal que possa ser
4

considerada como uma função linear dentro de intervalos pequenos de tempo [
em torno de λ
+−ii λλ , ]
i. Torna-se necessário, portanto, determinar H(λ) ou a melhor aproximação
desta função de acordo com este critério.
Como o espectro de relaxação H(λ) é geralmente utilizado na forma integrada, a
sua determinação através de métodos computacionais requer inicialmente a
discretização desta função, como mostrado abaixo
∑∫ ∑ ∫∞
=
∞ ∞
=
∆≈=−
+ 10 1)()()(
kkk
kHdHdH
k
k
λλλλ
λλλ
λ
λ
(1.3)
Onde: 1
1lnln+
−+
−
≈⎟⎠⎞
⎜⎝⎛=∆
k
k
k
ki λ
λλ
λ . Os limites superior e inferior
encontram-se em torno do intervalo
+kλ −
kλ
kλ + ∆k. O incremento ∆k é sempre positivo devido
a convenção adotada de se iniciar a ordenação dos tempos de relaxação com o valor
máximo desta grandeza ( = ). A variação do tempo de relaxação ∆maxλ kλ k pode ser
considerada constante de forma a simplificar os cálculos, entretanto tem sido
demonstrado na literatura que se ∆k for tratado como uma variável obtém-se um melhor
ajuste das curvas com poucos parâmetros.
O espectro discreto da Equação (1.3) corresponde ao módulo de relaxação
discreto:
∑∞
=
−∆≈−1
0 )/exp()()(k
kkk tHGtG λλ (1.4)
Desta forma, como será demonstrado no Capítulo 3, o espectro de relaxação
discreto pode ser expresso como resultante de um arranjo em que vários modelos de
Maxwell são colocados em paralelo, levando a obtenção da seguinte expressão:
∑∞
=
−≈−1
0 )/exp()(k
kk tGGtG λ (1.5)
5

Onde Gk é o módulo de relaxação sob tensão do k-ésimo modelo de Maxwell.
Sendo assim, os valores de H nos tempos de relaxação podem ser relacionados
diretamente com o módulo de relaxação sob tensão de cada modelo de Maxwell, através
da expressão:
kλ
kkk HG ∆= )(λ (1.6)
Desta forma, para se obter Gk a partir de H( ) ou vice-versa, é necessário apenas
conhecer os valores de ∆
kλ
k, que é obtido a partir do conjunto de soluções de ( ). kλ
O conjunto de dados se estende através de uma janela de tempo finita,
mínmáx t ωω /1/1 ≤≤ . Desta forma, há somente um número finito N obtido a partir de
todos os possíveis modelos de Maxwell. Isto especifica o conjunto de parâmetros que se
pretende determinar:
∑= +
=N
k k
kkGG
122
22
1)('
ϖλϖλ
ϖ (1.7)
∑= +
=N
k k
kkGG
1221
)(''ϖλ
ϖλϖ (1.8)
onde Gk e λk são os módulos de relaxação sob tensão e os tempos de relaxação
respectivamente .
Ambos Gk e λk são variáveis. O espectro discreto se expressa desta forma como
um módulo discreto que possibilita o ajuste de quaisquer dados de G’ e G’’ através de
uma escolha conveniente de parâmetros Gk e λk com k = 1,2,3,... N. Esta discretização
não compromete de forma alguma os resultados obtidos, uma vez que o espectro
discreto e o espectro contínuo são equivalentes.
A partir de um experimento com M dados, [ωi, G’(ωi) e G’’(ωi)] com i = 1, 2, 3,...,
M, o desvio entre a curva ajustada [Equações (1.7) e (1.8)] e os dados experimentais
pode ser expresso como um desvio padrão dado por:
6
2
122
2
1 122
222
1)(''11
1)´(111..
⎥⎥⎦
⎤
⎢⎢⎣
⎡
+−+
⎥⎥⎦
⎤
⎢⎢⎣
⎡
+−= ∑∑ ∑
== =
N
k ik
ikk
i
M
i
N
k ik
ikk
i
GG
GGM
DSϖλ
ϖλϖϖλ
ϖλϖ
(1.9)
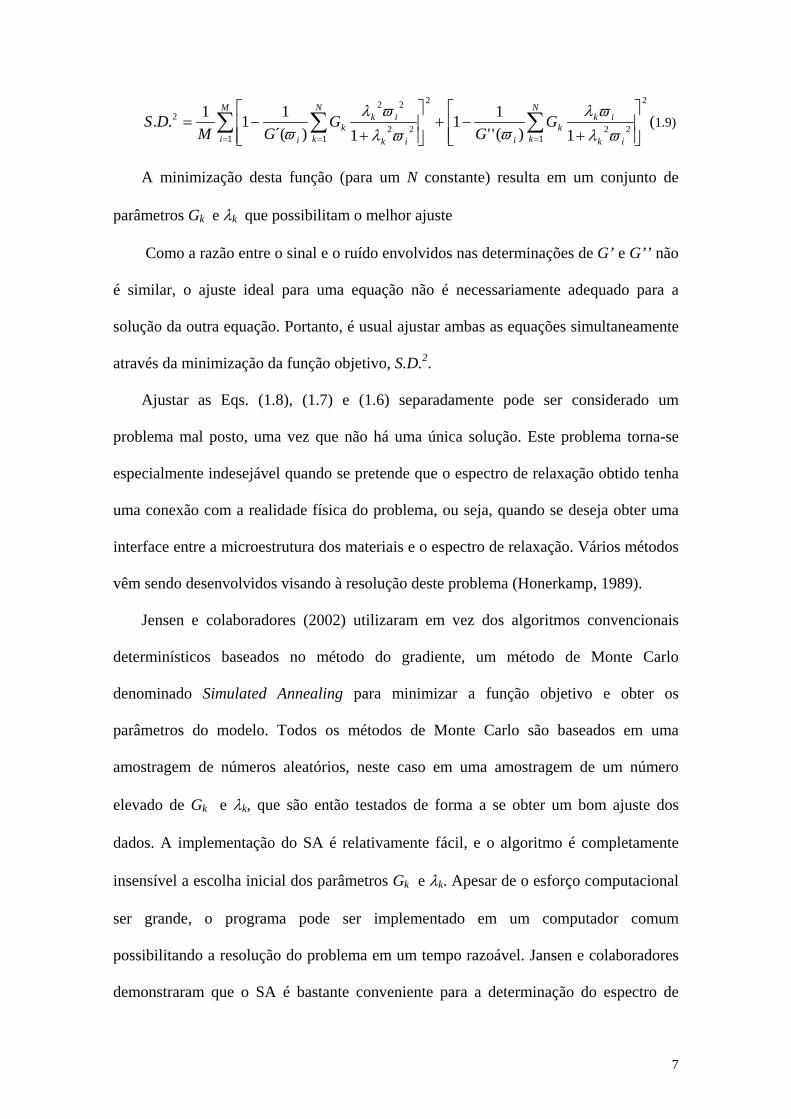
A minimização desta função (para um N constante) resulta em um conjunto de
parâmetros Gk e λk que possibilitam o melhor ajuste
Como a razão entre o sinal e o ruído envolvidos nas determinações de G’ e G’’ não
é similar, o ajuste ideal para uma equação não é necessariamente adequado para a
solução da outra equação. Portanto, é usual ajustar ambas as equações simultaneamente
através da minimização da função objetivo, S.D.2.
Ajustar as Eqs. (1.8), (1.7) e (1.6) separadamente pode ser considerado um
problema mal posto, uma vez que não há uma única solução. Este problema torna-se
especialmente indesejável quando se pretende que o espectro de relaxação obtido tenha
uma conexão com a realidade física do problema, ou seja, quando se deseja obter uma
interface entre a microestrutura dos materiais e o espectro de relaxação. Vários métodos
vêm sendo desenvolvidos visando à resolução deste problema (Honerkamp, 1989).
Jensen e colaboradores (2002) utilizaram em vez dos algoritmos convencionais
determinísticos baseados no método do gradiente, um método de Monte Carlo
denominado Simulated Annealing para minimizar a função objetivo e obter os
parâmetros do modelo. Todos os métodos de Monte Carlo são baseados em uma
amostragem de números aleatórios, neste caso em uma amostragem de um número
elevado de Gk e λk, que são então testados de forma a se obter um bom ajuste dos
dados. A implementação do SA é relativamente fácil, e o algoritmo é completamente
insensível a escolha inicial dos parâmetros Gk e λk. Apesar de o esforço computacional
ser grande, o programa pode ser implementado em um computador comum
possibilitando a resolução do problema em um tempo razoável. Jansen e colaboradores
demonstraram que o SA é bastante conveniente para a determinação do espectro de
7

relaxação discreto a partir de dados de G´ e G´´ . A versão utilizada foi baseada na
implementação de Goffee do algoritmo SA desenvolvido por Corana e colaboradores
(Corana et al., 1987).
O presente trabalho foi baseado em uma abordagem similar a de Jensen (2002),
com as seguintes modificações:
1. Alteração da lista de resfriamento do algoritmo Simulated Annealing;
2. Utilização de outro algoritmo estocástico de otimização global (ainda que não
tenham sidos obtidos bons resultados);
3. Ajuste do espectro discreto de modo a obter-se uma versão contínua do espectro
de relaxação;
4. Aplicação da metodologia para determinação do espectro de relaxação do
polietileno linear de baixa densidade (LLDPE) e comparação do espectro obtido com o
determinado através do reômetro AR 2000, que possui um software para esta finalidade.
O objetivo desta dissertação é determinar o espectro de relaxação H(λ) de
polímeros a partir das propriedades reológicas G’(ϖ) e G’’(ϖ) obtidas em regime
oscilatório de pequena amplitude.
Para consecução deste objetivo, torna-se necessário o desenvolvimento das
seguintes etapas:
• Construção de uma ferramenta computacional que possa ser utilizada para obter
o espectro discreto (Gk e λK) através da minimização da função-objetivo pelo
algoritmo Simulated Annealing;
• Obtenção do espectro de relaxação contínuo, através da interpolação dos pontos
obtidos pelo método de lagrange e pelo método de regressão não linear;
• Comparação com um espectro de relaxação obtido por um reômetro com um
software comercial para uma mesma amostra.
8

CAPÍTULO 2
INTRODUÇÃO À REOLOGIA DE POLÍMEROS
Como mencionado anteriormente, o espectro de relaxação contínuo de polímeros
H(λ) pode ser obtido a partir da determinação do espectro discreto de relaxação [Eqs.
(1.7) e (1.8)] utilizando-se o algoritmo simulated annealing. Neste capítulo, os
princípios básicos da reologia de polímeros, da viscoelasticidade linear, assim como as
deduções das equações fundamentais para obtenção do espectro de relaxação, serão
detalhadas.
2.1 – Conceito de Viscoelasticidade
Um polímero amorfo pode se comportar como um vidro a baixas temperaturas,
como um sólido com características de borracha a temperaturas intermediárias e como
um líquido viscoso à medida que a temperatura ultrapassa a fusão do material.
Para deformações relativamente pequenas, o comportamento mecânico a
temperaturas baixas é elástico, isto é, o material se comporta de acordo com a lei de
Hooke (Eq. 2.1). Em temperaturas mais elevadas prevalece o comportamento viscoso
onde o polímero apresenta características similares as de um líquido polimérico. Em
temperaturas intermediárias, o material sólido apresenta características de uma borracha
exibindo características mecânicas que são uma combinação desses dois extremos; essa
condição é conhecida como viscoelasticidade (Callister,2002)
γσ G= (2.1)
9

onde σ é a tensão de cisalhamento, G é o módulo elástico em cisalhamento e γ é a
deformação em cisalhamento. Esta equação é valida também quando a tensão aplicada é
uma tensão de tração ou compressão.
Existe um fator comum a todos sólidos, líquidos e a esses materiais
“intermediários”. Todos eles se deformarão sob aplicação de uma tensão ou de uma
carga. A deformação poderá ser instantânea ou poderá progredir com o tempo. Os
polímeros fundidos, em sua grande maioria, apresentam uma resposta à tensão ou
deformação aplicada que pode ser dependente tanto da intensidade e do tipo de
deformação como do tempo; apresentam ainda relações dependentes de sua história
termomecânica, ou seja, das deformações sofridas anteriormente. Portanto, torna-se
importante a possibilidade de derivar relações entre tensão, deformação e tempo, através
das equações de estado ou equações constitutivas do material usadas em reologia
(Bretas, 2000).
Para ilustrar as equações de estado básicas, considera-se a aplicação nos diversos
corpos de um programa de carregamento ilustrado na Figura 2.1. Nesta, uma carga é
aplicada instantaneamente no instante ta e liberada em tr (Callister, 2002).
Tempo
ta tr
Car
ga
Figura 2.1 – Carga aplicada ao longo do tempo (ciclo carga-tempo)
10

No caso de um corpo elástico ideal, a deformação elástica é instantânea, o que
significa que a deformação total ocorre no instante em que a tensão é aplicada ou
liberada (isto é, a deformação é independente do tempo). Além disso, com a liberação
das tensões externas a deformação é totalmente recuperada e a amostra assume as suas
dimensões originais. Esse comportamento é representado na Figura 2.2.
Tempo ta tr
Def
orm
ação
Figura 2.2 – Resposta da deformação em função do tempo para comportamento de um sólido elástico ideal
Em contraste, para um comportamento totalmente viscoso a deformação não é
instantânea; isto é, em resposta à aplicação de uma tensão, a deformação é retardada ou
dependente do tempo. Essa deformação não é reversível ou completamente recuperada
após a liberação da tensão. Este fenômeno está demonstrado na Figura 2.3.
Tempo ta tr
Def
orm
ação
Figura 2.3 – Resposta da deformação em função do tempo para comportamento viscoso
11

Para um comportamento viscoelástico a imposição de uma tensão como
ilustrado na Figura 2.1, resulta em uma deformação elástica instantânea, seguida por
uma deformação viscosa dependente do tempo, o que se constitui em uma forma de
anelasticidade. Este comportamento está ilustrado na Figura 2.4 e ocorre devido aos
processos microscópicos e atomísticos dependentes do tempo que acompanham o
processo de deformação.
Tempo ta tr
Def
orm
ação
Figura 2.4 – Resposta da deformação em função do tempo para comportamento viscoelástico
A resistência de um fluido ideal ao escoamento provocado por uma tensão σ –
viscosidade η – é definida pela lei de Newton de viscosidade. Esta relação estabelece
que a tensão σ, é proporcional ao gradiente de velocidade do líquido (Ward, 1985).
yV∂∂
=ησ (2.2)
onde V é a velocidade e y é a direção do gradiente de velocidade. Considerando um
gradiente de velocidade de um líquido no plano xy,
⎟⎟⎠
⎞⎜⎜⎝
⎛∂
∂+
∂∂
=x
Vy
V yxxy ησ (2.3)
Como tuVx∂∂
= e tvVy∂∂
= onde u e v são os deslocamento na direção x e y,
respectivamente. Portanto:
12

⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛∂∂
∂∂
+⎟⎠⎞
⎜⎝⎛∂∂
∂∂
=tv
xtu
yxy ησ (2.4)
Colocando a derivada do tempo em evidência, obtém-se:
⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎠⎞
⎜⎝⎛∂∂
+⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
∂∂
=xv
yu
txy ησ (2.5)
Ou seja, a tensão cisalhante é diretamente proporcional à razão da variação da
deformação com o tempo, ou seja, a derivada da deformação em relação ao tempo.
Assim esta relação é expressa pela Lei de Newton abaixo:
( )txy
Vxy ∂
∂=
γησ (2.6)
2.2 – Comportamento Viscoelástico Linear
A lei de Newton, como visto anteriormente, descreve um comportamento linear
para um líquido viscoso, no qual a tensão é linearmente relacionada com a taxa de
deformação, isto é, com a variação da deformação com o tempo, enquanto que a lei
de Hooke descreve a proporcionalidade entre a tensão aplicada a um sólido elástico e
sua deformação. Portanto, uma formulação possível para o comportamento linear de
um sólido viscoelástico é a combinação linear das duas equações que descrevem as
leis anteriores [Eqs. (2.1) e (2.6)]. Ou seja:
( ) ( )t
G xyxyVxyExyyx ∂
∂+=+=
γηγσσσ (2.7)
Esta equação representa um dos modelos mais simples para o comportamento
viscoelástico linear (Modelos de Kelvin ou Voigt), no qual considera-se que a tensão
total aplicada a um material viscoelástico é igual a soma das duas tensões (elástica e
viscosa). Este modelo será descrito posteriormente.
13

Existem dois tipos de experimentos básicos que descrevem o comportamento
viscoelástico linear de um material. Em um deles, denominado relaxação sob tensão, o
material é submetido a uma deformação constante e o decaimento da tensão com o
tempo é medido. No outro, aplica-se uma tensão com módulo constante ao material
enquanto a deformação é medida como uma função do tempo. Este experimento é
denominado creep ou fluência viscoelástica.
Na definição de relações constitutivas para um sólido elástico assume-se que as
deformações são pequenas e que as relações entre as tensões e deformações são lineares.
O princípio da linearidade pode ser estendido a materiais que apresentam deformações
dependentes do tempo, através do Princípio de Superposição de Boltzmann que
estabelece que na viscoelasticidade linear, os efeitos de uma tensão são meramente
aditivos, assim como na elasticidade clássica. A diferença é que na viscoelasticidade
linear importa em qual instante o efeito foi criado. Embora a aplicação da tensão possa
causar uma deformação dependente do tempo, pode ainda ser assumido que cada
incremento da tensão contribui de forma independente para a deformação. A partir desta
discussão pode ser ressaltado que a teoria da viscoelasticidade linear também deve
conter a hipótese adicional que as deformações são pequenas. Pode-se perceber,
portanto, que a teoria da viscoelasticidade linear envolve ensaios onde tensões baixas
são aplicadas ao sistema. Ensaios realizados com aplicação de altas tensões apresentam
uma relação não-linear entre tensão e deformação (Ward, 1985).
14

2.2.1 – Fluência Viscoelástica (CREEP)
Freqüentemente, os materiais são colocados em serviço a temperaturas elevadas
e ficam expostos a tensões mecânicas estáticas. A deformação sob tais circunstâncias é
conhecida por fluência. A fluência é definida como sendo a deformação permanente e
dependente do tempo de materiais, quando estes são submetidos a uma carga ou tensão
constante. É em geral um fenômeno indesejável e, com freqüência, é o fator de
limitação da vida útil de uma peça (Callister , 2002).
A maioria dos materiais poliméricos é suscetível a estas deformações
dependentes do tempo, quando o nível de tensão é mantido constante; tais deformações
são algumas vezes denominadas fluência viscoelástica. Este tipo de deformação pode
ser significativo mesmo à temperatura ambiente e sob tensões modestas que se
encontram abaixo do limite de escoamento do material (Callister, 2002).
A comparação do comportamento de um sólido elástico com o de um sólido
viscoelástico linear sob uma carga constante é elucidativa. Para um sólido elástico, a
relação entre o programa de carregamento e a deformação é apresentada na Figura 2.5a.
Pode ser verificado que a deformação apresenta o mesmo perfil que o programa de
carregamento. Observa-se também uma relação de proporcionalidade exata entre a
deformação e a intensidade das cargas aplicadas (Ward, 1985).
O efeito da aplicação de um programa de carregamento similar a um sólido
viscoelástico linear apresenta algumas similaridades (Figura 2.5b). No caso mais geral,
a deformação total e é a resultante da soma de três tipos de deformação: e1 , e2 e e3 . As
deformações e1 e e2 são respectivamente denominadas, deformação elástica instantânea
e deformação elástica retardada; e3 é a parte da deformação que é idêntica a deformação
de um líquido viscoso, comportando-se segundo a Lei de Newton da viscosidade. O
15

processo reversível determina o comportamento mecânico sob carregamentos efetuados
em períodos curtos, enquanto que o irreversível controla as propriedades de longo
alcance (Chodák,1998; Callister, 2002).
Como o material apresenta um comportamento linear, as magnitudes das
deformações e1 , e2 e e3 são exatamente proporcionais as intensidades das tensões
aplicadas. Assim um simples experimento de carregamento define a compliância em
“creep”, J ( t ) que é função unicamente do tempo (Ward, 1985).
J ( t ) = J1 + J2 + J3 = σ
)(te (2.8)
onde J1 , J2 e J3 correspondem a e1 , e2 e e3 .
O termo J3 que define o fluxo Newtoniano pode ser negligenciado, para
polímeros rígidos a temperaturas ordinárias, porque as suas viscosidades são muito
elevadas. Polímeros amorfos lineares apresentam um termo J3 finito, em temperaturas
acima da temperatura vítrea, mas em temperaturas mais baixas, seu comportamento é
dominado por J1 e J2. Polímeros reticulados não apresentam o termo J3. Este termo
também pode ser negligenciado no caso de polímeros altamente cristalinos (Callister,
2002).
16

Figura 2.5 – Deformação de um sólido elástico (a) e de um sólido viscoelástico linear (b)
A Figura 2.6 apresenta a variação da compliância com o tempo, a uma
temperatura constante, sob uma ampla escala de tempo, para um polímero amorfo
idealizado que possui somente uma transição-relaxação. Pode ser verificado em
experimentos de curtíssima duração, que a compliância observada é igual a 10 -9 m2 N-1
e corresponde a apresentada por um sólido vítreo. Em experimentos com duração muito
longa, a compliância observada é de 10-5 m2 N-1, e corresponde a apresentada por um
sólido borrachoso. Em ambos os casos, a compliância é independente do tempo. Em
tempos intermediários, a compliância situa-se entre estes valores e é dependente do
tempo.
17

λ’
Figura 2.6 – A compliância em “creep” como uma função do tempo
Pode ser inferido a partir da Figura 2.6 que o comportamento observado,
dependerá da escala de tempo do experimento em relação a algum parâmetro básico do
polímero. Para o “creep”, este parâmetro é denominado tempo de retardação λ’, e cai
no meio da faixa de tempo da escala apresentada na figura acima. Assim, a distinção
entre a borracha e o sólido vítreo é λ’ um tanto artificial, uma vez que depende somente
do valor de λ’ a temperatura ambiente para cada polímero. Para a borracha, o valor de
λ’ é muito pequeno a temperatura ambiente comparado com a duração normal de um
experimento, que é provavelmente maior que 1s, enquanto o oposto é verdadeiro para o
plástico vítreo. O valor de λ’ para um dado polímero é relacionado a sua estrutura
molecular. Estas considerações permitem que a influência da temperatura nas
propriedades dos polímeros seja compreendida. Com o aumento da temperatura, a
freqüência dos rearranjos moleculares aumenta, reduzindo o valor de λ’. Em
temperaturas muito baixas, portanto a borracha se comportará como um sólido vítreo, e
de forma similar o plástico vítreo amolecerá a temperaturas elevadas (Ward, 1985).
18

2.2.2 – Relaxação sob Tensão
O ensaio de relaxação sob tensão é o contraposto do ensaio de creep. Neste caso,
a amostra é submetida a uma deformação constante e, e o decaimento da tensão é o
parâmetro observado. O módulo de relaxação sob tensão G(t), é definido pela relação
abaixo, supondo que o comportamento observado seja linear:
ettG )()( σ
= (2.9)
No caso da relaxação sob tensão, a presença de um fluxo viscoso afetará o valor
limite da tensão. Quando ocorre um fluxo viscoso, a tensão pode decair a zero, em
tempos suficientemente longos. Porém quando não há a presença de um fluxo viscoso, a
tensão decai a um valor finito, obtendo-se, então, um módulo “relaxado” ou de
equilíbrio GR em um tempo infinito.
A Figura 2.7 a seguir pode ser comparada ao gráfico correspondente para o
ensaio de creep (Figura 2.6) já mostrado anteriormente. As mesmas regiões podem ser
notadas em ambos os gráficos, onde o material apresenta comportamento vítreo,
viscoelástico, borrachoso e fluido. O tempo de transição λ também é representado no
gráfico, porém agora é denominado tempo de relaxação λ, caracterizando a escala de
tempo para o comportamento viscoelástico. Embora ambos os tempos, λ e λ’, tenham a
mesma ordem de magnitude, eles não são idênticos.
19

Vítreo Fluxo
Borrachoso
λ
Viscoelástico
log t
Figura 2.7 – O Módulo da Relaxação Sob Tensão G(t) em função do tempo
Os efeitos das variações de temperatura nos ensaios de relaxação sob tensão são
similares aos observados nos ensaios de creep, isto é, a mudança na temperatura
equivale a uma mudança na escala de tempo. A equivalência entre tempo e temperatura
é aplicável a todos os polímeros que apresentam um comportamento viscoelástico
linear.
20

2.3 – Tratamento Matemático do Comportamento Viscoelástico Linear
O princípio de superposição de Boltzmann foi a primeira descrição matemática
do comportamento de viscoleasticidade linear. Este princípio é baseado nas seguintes
hipóteses.
(1) O “creep” em uma amostra é uma função da história de carregamento total a
qual a amostra foi submetida
(2) Cada etapa de carregamento contribui de forma independente à deformação
final, que pode ser determinada pela adição de cada contribuição.
Um ensaio típico de “creep“ consiste em submeter um corpo de prova a uma
carga ou tensão enquanto se mantém a temperatura constante; a deformação é medida e
colocada em gráfico como uma função do tempo decorrido. A maioria dos ensaios é do
tipo com carga constante.
λ’1 λ’2 λ’3
Figura 2.8 – Comportamento de “creep” de um sólido viscoelástico linear
Supondo que a compliância J(t) seja conhecida no intervalo de 1s a 1 Ms; pode-
se determinar, através da Lei de Hooke, o valor da deformação de cisalhamento γ0(t)
para qualquer valor de t (1s<t< 1Ms) resultante da tensão σ0 aplicada no instante t = 0.
21

γ0(t) = σ0 J(t) (2.10)
Supondo que uma nova tensão adicional σ1 seja aplicada no instante t1, a nova
deformação γ1 medida em relação ao tempo total de ensaio t pode ser expressa por:
γ1(t) = σ1 J(t – t1) (2.11)
No instante t, no qual a tensão σ1 foi aplicada, houve em relação ao início do
experimento um intervalo de tempo igual a t - t1. A compliância de cisalhamento
correspondente a esta diferença é a que determina a deformação em cisalhamento γ1(t).
O princípio de Superposição de Boltzmann estabelece que a deformação total no tempo
t é dada por:
γ(t) = γ0(t) +γ1(t) = σ0 J(t) + σ1 J(t – t1) (2.12)
Em outras palavras, o Princípio de Superposição de Boltzmann estabelece que a
aplicação conjunta das tensões σ0 e σ1 em um material dá origem a uma deformação
γ0(t) +γ1(t), uma vez que a aplicação somente da tensão σ0 resulta em uma deformação
γ0(t) e a atuação da tensão σ1 dá origem a uma deformação γ1(t). Se fosse aplicado no
corpo um carregamento como ilustrado na Fig.2.8, ao invés das duas tensões, então a
deformação seria dada por (McCrum, 1995):
γ(t) = ∆σ1 J (t -t1) + ∆σ2 J (t -t2 ) + ∆σ3 J (t - t3) + ... (2.13)
onde: J (t -tn) é a função compliância em “ creep “.
Se a tensão varia continuamente com o tempo e todo o domínio da função é
definido, a Eq. (2.13) pode ser generalizada resultando na forma integral do Princípio de
Superposição de Boltzmann. A deformação no tempo t é obtida para um corpo de prova
que no tempo t’ tenha sofrido a ação de uma tensão σ(t’), onde 0 < t’ < t. O corpo de
prova não havia sofrido nenhuma deformação em t’ = 0, tendo esquecido sua história de
22

carregamento. A submissão da amostra durante um longo período de tempo a uma
tensão zero, causaria o esquecimento da sua história prévia de carregamento. A
deformação no tempo t é então dada por:
∫ −=t
dtdtdttJt
0
''
)'()( σγ (2.14)
No entanto, quando todo carregamento prévio da amostra é considerado,
segundo o Princípio de Superposição de Boltzmann, a deformação no tempo t pode ser
calculada por:
∫∞−
−=t
dtdtdttJt '
')'()( σγ (2.15)
Levando em consideração que há uma resposta elástica instantânea do material
quando submetido a uma tensão, um termo constante, referente a esta deformação, pode
ser incluído à equação acima. Reescrevendo-se a mesma em função do tempo de
retardação λ’, obtém-se a forma matemática mais correta para a integral:
∫∞−
−+⎥⎦
⎤⎢⎣
⎡=
t
U
dddtJ
Gt '
')'()( λλσλσγ (2.16)
Onde GU é o ‘módulo não relaxado’. As Eqs. (2.14), (2.15) e (2.16) são utilizadas para
representar o Princípio de Superposição de Boltzmann.
Para um ensaio específico de Relaxação sob Tensão, o comportamento pode ser
representado de forma similar, só que neste caso a deformação do material é que é
incrementada de γ∆ em intervalos de tempo t’. Através do Princípio de Superposição de
Boltzmann, pode-se concluir que um programa de Relaxação sob Tensão no qual
incrementos de deformação 1γ∆ , 2γ∆ e 3γ∆ são adicionados em instantes de t1, t2 e t3, a
tensão total no tempo t é dada por:
23

...)()()()( 332211 +−∆+−∆+−∆= ttGttGttGt γγγσ (2.17)
Ultilizando as mesmas considerações efetuadas na discussão do ensaio de creep,
e reescrevendo-se a expressão obtida em função do tempo de relaxação λ, obtém-se
[ ] ∫∞−
−+=t
R dddtGGt λλγλγσ )()( (2.18)
Onde GR é o módulo em equilíbrio, parâmetro associado normalmente à polímeros no
estado sólido (Jensen, 2002).
2.3.1 – O Modelo de Maxwell
O modelo de Maxwell é apresentado esquematicamente na Figura abaixo.
σ1, γ1
EmGm
ηm
σ2, γ2
Figura 2.9 – O Modelo de Maxwell
No modelo de Maxwell a tensão total do sistema σ é idêntica àquela aplicada
tanto na mola (σ1) como no pistão (σ2). A deformação total do sistema, entretanto, é
descrita em função da deformação referente a cada constituinte do sistema. A mola,
24

elemento elástico do sistema, não responde da mesma forma que o pistão, elemento
viscoso, à ação de uma dada tensão. Neste caso, a deformação total γ, é igual ao
somatório das deformações da mola γ1, e do pistão γ2. Portanto:
σ = σ1 = σ2
γ = γ1 + γ2 (2.19)
Como σ1 corresponde a tensão aplicada na mola (Lei de Hooke – Eq. 2.1) e σ2 é
a tensão aplicada no pistão (Lei de Newton – Eq. 2.2), obtêm-se:
σ1 = Gmγ1 (2.20)
dtd
m2
2γησ = (2.21)
Derivando a Eq. (2.20) em relação ao tempo, obtém-se
dtdG
dtd
m11 γσ
= (2.22)
Como a deformação total é igual ao somatório das deformações constituintes,
sua variação em função do tempo também obedece a esta relação. Portanto, através da
reorganização das equações anteriores, a seguinte equação diferencial é obtida:
mm dtd
Gdtd
ησσγ
+=1 (2.23)
O modelo de Maxwell é utilizado para os ensaios de relaxação sob tensão, ou
seja, para ensaios onde a deformação é constante e a variação da tensão em função do
tempo é determinada. Sendo assim, a derivada da deformação total em relação ao tempo
é nula, e a equação anterior é reescrita da seguinte maneira:
25

(2.24) dtG
dtd
m
m
ησ
−=
No tempo t = 0, a tensão σ é igual à tensão inicial σ0. Integrando a equação
acima, obtém-se a seguinte solução:
tG
m
m
ησσ −
= exp0 (2.25)
Esta equação mostra que o decaimento da tensão é uma função exponencial do
tempo. O tempo de relaxação λ é definido como uma razão da viscosidade pelo módulo
de relaxação sob tensão,
m
m
Gηλ = (2.26)
Sendo assim, a Eq. (2.25) pode ser reescrita da seguinte maneira:
λσσ t−
= exp0 (2.27)
Este modelo, no entanto, apresenta dois inconvenientes. Se uma tensão constante
for aplicada, sua derivada em relação ao tempo é nula e, a Eq. (2.23) resume-se a
seguinte expressão onde um fluxo Newtoniano é observado:
mdt
dησγ
= (2.28)
Esta relação claramente não é verdadeira para os materiais viscoelásticos, onde o
o comportamento em “creep” é muito mais complexo do que esta equação sugere. Por
outro lado, o comportamento da relaxação sob tensão não pode ser representado apenas
por um único termo de decaimento exponencial, assim como a tensão não decai
necessariamente a zero em um tempo infinito.
26

2.3.2 – O Modelo de Kelvin ou Voight
O modelo de Kelvin ou Voigt consiste em uma mola e um pistão associado em
paralelo, como mostra a Figura 2.10 abaixo:
σ
, Gm σ2, γ2, ηv σ1, γ1, Gv
Figura 2.10 – O modelo de Kelvin ou Voight
Como a mola e o pistão estão em paralelo, a deformação total do sistema será a
mesma que a mola e o pistão sofrerão. A tensão, entretanto, será a soma das tensões em
cada componente do sistema. Portanto:
σ = σ1 + σ2
γ = γ1 = γ2 (2.29)
Sendo assim, a tensão total é dada por:
dtdeG vvγησ += (2.30)
Para ensaios de relaxação sob tensão, nos quais a deformação é constante, o
modelo de Voigth pode ser simplificado, obtendo-se:
27

γσ vG= (2.31)
Esta equação mostra que o material se comporta como um sólido elástico, não
sendo uma boa representação para o comportamento viscoelástico. O modelo de Voight,
entretanto, é muito útil na representação de ensaios de compliância em “creep”, nos
quais a tensão é constante, ou seja, σ = σ0. Para dedução da expressão que relaciona a
deformação com o tempo, faz-se necessário uma reorganização da Eq. (2.30) de modo
que o método de Lagrange possa ser aplicado para a resolução da equação diferencial
ordinária.
0=−+ σγηγdtdG vv (2.32)
A resolução desta equação diferencial é apresentada detalhadamente em anexo. O
aumento da deformação com o tempo é dada por:
'exp0 λ
γγ t−= (2.33)
Onde v
v
Gηλ =' , denominado tempo de retardação.
28

2.3.3 – O Modelo de Zener
O comportamento de um sólido elástico é representado de forma mais
satisfatória através do modelo de Zener, uma vez que este representa todas as
características significativas das relaxações dos polímeros. Este modelo fornece uma
representação aproximada do comportamento observado dos polímeros na faixa
viscoelástica.
O modelo pode ser representado de duas maneiras, que se tornam aparentemente
idênticas. Na primeira forma (Esquema I), a mola, que é o elemento elástico linear, e o
pistão, que é o elemento viscoso linear, encontram-se em paralelo (modelo de Voight).
A este modelo é acoplada uma mola em série. Na outra forma (Esquema II), a mola
encontra-se em paralelo (modelo de Maxwell). As propriedades significativas inerentes
ao modelo de Zener incluem (McCrum, 1985):
i. Duas constantes de tempo, sendo que uma é relacionada a uma tensão
constante – λ’ (tempo de retardação), e a outra a uma deformação constante
– λ (tempo de relaxação);
ii. Uma deformação instantânea no tempo t = 0, quando o material é submetido
a uma tensão representada por uma função degrau;
iii. Recuperação completa da deformação após remoção da tensão.
Nesta discussão, no entanto, serão abordados apenas o caso representado no
Esquema I e a derivação da equação diferencial representativa do modelo de Zener.
29

Esquema I Esquema II
GD
GR
η
γ2
γ1
σ-σ1
JU
JD
γ
σ1
η
σ σ
Figura 2.11 – O modelo de Zener
Pode ser visualizado no Esquema I que a mola e o pistão sofrem a mesma
deformação (modelo de Voight). A deformação na mola U pode ser calculada pela Lei
de Hooke, entretanto, torna-se mais conveniente expressá-la em função da compliância
JU, visto que o modelo representa de forma mais satisfatória os ensaios de creep. Como
a compliância é o inverso do módulo de tensão de cisalhamento G, a lei de Hooke pode,
de uma forma geral, ser expressa da seguinte maneira:
JG
γγσ == (2.34)
Para a mola isolada U:
UJσγ =2 (2.35)
A tensão na mola em paralelo com o pistão é dada pela a diferença entre a tensão
total σ e a tensão no pistão (σ1). A tensão na mola é dada por:
30

( ) DJ11 σσγ −= (2.36)
Como o primeiro conjunto está em série com a mola isolada (mola U), a
deformação total γ pode ser calculada através da soma de ambas deformações.
21 γγγ += (2.37)
Substituindo as Eqs. (2.35) e (2.36) na Eq. (2.37) e rearranjando as equações anteriores,
obtém-se:
γ- UJσ = ( ) DJ1σσ − (2.38)
A deformação no pistão com viscosidade η, pode ser expressa em função da
deformação total. Através da Lei de Newton, a tensão σ1 é dada por:
( )dt
d 21
γγησ −= (2.39)
Como UJσγ =2 , tem-se que:
( )dt
Jd Uσγησ −=1 (2.40)
Substituindo σ1 na Eq. (2. 38), obtém-se:
( )dt
JdJJJ U
DDUσγ
ησσγ−
−=− (2.41)
A Eq. (2.41) pode ser rearranjada da seguinte forma:
⎥⎦⎤
⎢⎣⎡ −−=−
dtdJ
dtdJJJ UDDU
σγησσγ (2.42)
Introduzindo a variável ηλ DJ=' como uma constante característica denominada
tempo de retardação, tem-se:
( )dtdJ
dtdJJ UDU
σλγλσγ '' +−+= (2.43)
31

A compliância resultante é dada pela soma da compliância da mola isolada com
a mola em paralelo com o pistão.
JR = JU + JD (2.44)
Através da Eq. (2.44), obtém-se:
dtdJ
dtdJ UR
σλγλσγ '' +−= (2.45)
A Eq. (2.45) pode ser rearranjada da seguinte maneira:
dtdJJ
dtd
URσλσγλγ '' +=+ (2.46)
Multiplicando a equação anterior por RJ
1 , é possível escrever:
dtd
JJ
dtd
J R
U
R
σλσγλγ ''1+=⎥⎦
⎤⎢⎣⎡ + (2.47)
O termo R
U
JJ
'λ é uma outra constante, denominada constante de tempo de
relaxação λ. Ou seja:
λ =R
U
JJ
'λ (2.48)
A Eq (2.48) pode ser reescrita gerando a Eq. (2.49), onde as duas constantes de
tempo são evidenciadas.
R
U
U
R
GG
JJ
==λλ '
(2.49)
A introdução da constante do tempo de relaxação λ na Eq. (2.47) gera,
finalmente, a equação representativa do modelo de Zener.
dtd
dtd
J R
σλσγλγ +=⎥⎦⎤
⎢⎣⎡ + '1 (2.50)
32

Para uma descrição quantitativa exata do comportamento viscoelástico linear
observado, deveria ser incluído na equação diferencial linear outros termos (derivada
segunda, terceira e etc.). Para a representação satisfatória de dados experimentais,
entretanto, isto não é necessário (McCrum, 1995).
Pode ser observado que esta equação descreve de forma mais satisfatória o
comportamento viscolelástico, visto que ela é válida para ensaios de creep, onde a
tensão é constante, assim como para o ensaio de relaxação sob tensão, onde a
deformação é o termo constante.
33

2.4 – O Modelo de Zener aplicado à Ensaios de “Creep”
No ensaio de creep uma tensão constante σ0 é aplicada no tempo t = 0. Sendo
assim, a Eq. (2.50) é apresentada da seguinte forma:
0' σγλγ RJdtd
=+ (2.51)
Rearranjando-se a equação acima, obtém-se:
'0 λγσγ dt
Jd
R
=−
(2.52)
Esta equação diferencial de primeira ordem pode ser integrada pelo método de
separação de variáveis, onde u, a variável introduzida, é definida por:
u = JRσ0 – γ (2.53)
Assim sendo: du = – dγ (2.54)
Substituindo os valores de u e du na Eq. (2.52), obtem-se as seguintes
expressões:
∫∫ =−
'λdt
udu , logo, ctu +=−
'ln
λ (2.55)
A equação acima pode ser reescrita substituindo os valores de u (Eq. 2.53) e du
(Eq. 2.54) e multiplicando-se esta por (-1).
( ) ctJ R −−=−'
ln 0 λγσ (2.56)
Rearranjando-se a equação acima, obtém-se:
c
t
J R exp'
exp0
⎟⎠⎞
⎜⎝⎛−
=− λγσ (2.57)
Como o inverso da exponencial de uma constante ⎟⎠⎞⎜
⎝⎛
cexp1 é uma outra
constante , tem-se que:
34

⎟⎠⎞
⎜⎝⎛−=−
'exp0 λ
γσ tkJ R (2.58)
onde k é uma constante.
A deformação γ é uma função do tempo t. Assim:
⎟⎠⎞
⎜⎝⎛−−=
'exp)( 0 λ
σγ tkJt R (2.59)
A solução desta equação é dada pela condição de valor inicial, onde a tensão σ0
aplicada ao sistema no tempo t = 0 é igual a deformação instantânea do material, dada
pelo produto da compliância JU e a tensão σ0 aplicada. Portanto:
γ (0) = σ0 JU (2.60)
Aplicando-se a condição de valor inicial (Eq. 2.60) na Eq. (2.59), obtém-se:
=⎟⎠⎞
⎜⎝⎛−−=
'0exp)0( 0 λ
σγ kJ R σ0 JU (2.61)
O valor da constante k é, portanto:
k = σ0(JR – JU ) (2.62)
Substituindo este valor de k na Eq. (2.59), chega-se à expressão abaixo:
⎟⎠⎞
⎜⎝⎛−−−=
'exp)()( 00 λ
σσγ tJJJt URR (2.63)
Dividindo-se a Eq. (2.63) por σ0 , deriva-se o valor da compliância, J(t):
⎟⎠⎞
⎜⎝⎛−−+=
'exp)()(
λtJJJtJ RUR (2.64)
Adicionando-se e subtraindo o termo JU, a equação acima não é alterada e pode
ser reescrita de seguinte maneira:
⎭⎬⎫
⎩⎨⎧
⎟⎠⎞
⎜⎝⎛−−−+=
'exp1)()(
λtJJJtJ URU (2.65)
35
2.5 – O Modelo de Zener aplicado à Ensaios de Relaxação sob Tensão
Nos ensaios de relaxação sob tensão há a aplicação de uma deformação
constante 0γ . Com o decorrer do tempo, observa-se que há o decaimento do módulo de
relaxação G. Assim, o experimento de relaxação sob tensão é melhor descrito em
termos de G. Como este é o inverso da compliância J, a Eq. (2.50), que descreve o
modelo de Zener, pode ser rescrita da seguinte maneira:
dtd
dtdGR
σλσγλγ +=⎥⎦⎤
⎢⎣⎡ + ' (2.66)
Como a deformação é constante e é aplicada em um tempo t = 0, obtém-se a
seguinte expressão:
dtdGRσλσγ +=0 (2.67)
Esta equação pode ser facilmente resolvida da mesma forma utilizada para o
creep, ou seja, através do método de separação de variáveis, onde:
σγσλ −= 0RGdtd (2.68)
Rearranjando-se a Eq. (2.68), obtém-se a seguinte equação diferencial:
λσγσ dt
Gd
R
=−0
(2.69)
Esta equação diferencial de primeira ordem pode ser integrada pelo método de
separação de variáveis, onde u, a variável introduzida, é definido por:
u = GR 0γ –σ (2.70)
Assim sendo: du = – dσ (2.71)
Substituindo os valores de u e du na Eq. (2.69), gera-se:
36

∫∫ =−
λdt
udu , logo, ctu +=−
λln (2.72)
A Eq. (2.72) pode ser reescrita substituindo os valores de u e du [Eq. (2..70) e
(2.71)] e multiplicando-se esta equação por (-1), obtendo-se:
( ) ctGR −−=−λ
σγ 0ln (2.73)
Rearranjando-se a equação acima, obtém-se:
c
t
GR exp
exp0
⎟⎠⎞
⎜⎝⎛−
=− λσγ (2.74)
Como o inverso da exponencial de uma constante ⎟⎠⎞⎜
⎝⎛
cexp1 é uma outra
constante , tem-se que:
⎟⎠⎞
⎜⎝⎛−=−
λσγ tkGR exp0 (2.75)
A tensão σ é uma função do tempo t. Assim:
⎟⎠⎞
⎜⎝⎛−−=
λγσ tkGt R exp)( 0 (2.76)
A solução desta equação é dada pela condição de contorno inicial, onde a tensão
σ0 aplicada ao sistema no tempo t = 0 é igual ao produto da deformação instantânea do
material e seu módulo GU. Portanto:
σ(0) = 0γ GU (2.77)
Aplicando-se a condição de valor inicial na Eq. (2.76), obtém-se:
=⎟⎟⎠
⎞⎜⎜⎝
⎛−−=
eR kG
τγσ
0exp)0( 0 0γ GU (2.78)
Como a exponencial de zero é 1, o valor da constante k é, portanto:
37

k = 0γ (GR –GU) (2.79)
Substituindo este valor na Eq. (2.76),obtem-se:
⎟⎠⎞
⎜⎝⎛−−+=
λγγσ tGGGt RUR exp)()( 00 (2.80)
Dividindo-se a Eq. (2.95) por γ0, tem-se a expressão do módulo de relaxação sob
tensão, G(t):
⎟⎠⎞
⎜⎝⎛−−+=
λtGGGtG RUR exp)()( (2.81)
Adicionando-se e subtraindo o termo GU à equação acima, esta não se altera,
podendo ser reescrita de seguinte maneira:
⎭⎬⎫
⎩⎨⎧
⎟⎠⎞
⎜⎝⎛−−−=λtGGGtG RUU exp1)()( (2.82)
A representação gráfica da Eq. (2.65) , compliância J(t) em função do tempo
(log t) e da Eq. (2.82), módulo de relaxação sob tensão G(t) em função do tempo (log t)
é apresentada na Figura 2.11 a seguir.
log t (s)
38
Figura 2.11 – Solução do Modelo de Zener. Curvas de G(t) e J(t) versus log t; Modelo com JU =1 GPa–1, JR/JU = 10, λ’ =10s e λ =100s

Pode ser observado que em ambos os experimentos de creep e de relaxação sob
tensão, as soluções são idênticas em tempos muito curtos (t << λ’) onde a razão entre a
tensão e a deformação é GU = JU-1 e em tempos muito longos (t >> λ’), onde a razão
entre a tensão e a deformação é GR = JR-1.
Em tempos intermediários pode ser visto que no “creep”, a compliância passa de
um valor JU para JR com uma constante de tempo λ’. Na relaxação sob tensão o módulo
passa de GU para GR com uma constante de tempo λ. Sendo assim em tempos muito
curtos e em tempos muito longos, as tensões e as de deformação são Hookeanas. Em
tempos intermediários, entretanto, onde o tempo t é da ordem dos tempos de relaxação,
isto não é verdadeiro e é nesta região que são observados os efeitos viscoelásticos.
O modelo viscolelástico de Zener pode ser analisado fisicamente. Por exemplo,
quando uma tensão σ0 é aplicada ao conjunto (Esquema I), a resposta instantânea é
representada pela mola de compliância JU, visto que o pistão não se move
instantaneamente. Já no Esquema II, a resposta instantânea é referente às molas de
módulos GR e GD respectivamente. Para este último caso, a deformação instantânea
(para tempo próximo de zero) pode ser também escrita da seguinte forma:
000
0 σσσ
γ UUDR
JGGG
==+
= (2.83)
A relação acima demonstra não somente que o modelo de Zener pode ser
representado pelos dois arranjos (Esquema I e Esquema II), mas também que a relação
entre o módulo de relaxação GR e os outros módulos é dado por:
GR = GU - GD (2.84)
Fisicamente pode ser visto no Esquema II que GR γ0 é a tensão independente do
tempo no elemento GR. A tensão dependente do tempo no outro braço do modelo
nivela-se em t = 0 com valor igual a GD γ0 pois a deformação total é igual a instantânea
Conforme t tende ao infinito, a tensão no pistão tende à zero.
39

2.6 – O Modelo de Zener Generalizado
O modelo de Zener é considerado bastante satisfatório para representação de
materiais viscoelásticos, embora apresente algumas falhas. Através da análise da Figura
2.12 anterior, observa-se que a função compliância J(t), assim como o módulo de
relaxação sob tensão G(t) variam em uma escala logarítmica de aproximadamente três
décadas de tempo. Para a compliância J(t), a região de relaxação ativa se estende no
intervalo de tempo de aproximadamente 1s até 103 s; e no caso do módulo de relaxação
sob tensão G(t) ocorre no intervalo de tempo de 0,1 s até 102 s.
No entanto, a análise do polietileno linear ilustrada na Figura 2.12, por exemplo,
mostra uma relaxação em intervalos de tempo mais amplos do que apenas 3 décadas de
tempo.
log t (s)
40
Figura 2.12 – Variação da Compliância J(t) em função do log do tempo, para o Polietileno Linear, em diferentes temperaturas.

Pode ser observado que para cada temperatura, a variação da compliância em
função do tempo se estende em uma faixa logarítmica de tempo de cerca de quatro
décadas de tempo, contrastando com a previsão do modelo.
Estas falhas do modelo de Zener são facilmente retificadas assumindo-se que o
processo de relaxação em polímeros envolve, na verdade, um conjunto de processos de
relaxação com um espectro de tempos de relaxação que são muito próximos. A
heterogeneidade do sólido polimérico é responsável pelo fato de ter-se uma distribuição
de tempos de relaxação. Assim, todas as relaxações em polímeros são descritas por uma
curva Gaussiana de tempos de relaxação, obtendo-se um espectro de tempo de
relaxação.
Estes processos podem ser analisados a partir do modelo generalizado de Zener,
constituído por n elementos mola/pistão em série (Modelo de Voight) ou em paralelo
(Modelo de Maxwell), onde ambos estão ligados a uma mola no final, caracterizando a
parte do modelo referente à deformação instantânea do material. O modelo de Zener
generalizado, aplicado para o estudo do ensaio de relaxação sob tensão, é ilustrado na
Figura 2.13.
Figura 2.13 – O modelo de Zener Generalizado para Ensaios de Relaxação sob Tensão
41

O i-ésimo elemento deste modelo apresenta módulo de relaxação Gi, viscosidade
do pistão ηi e tempo de relaxação λi. Cada elemento do modelo sofre a ação da aplicação
de uma tensão σ0. A mola isolada do conjunto também sofre os efeitos da aplicação
desta tensão. Para um tempo t = 0, o módulo de relaxação sob tensão é igual a GR. Neste
caso, há uma deformação instantânea do material em resposta à tensão aplicada, que não
depende do tempo.
No entanto, para um tempo t qualquer, a tensão decai com tempo, de acordo com
a Eq. (2.81) descrita para o ensaio de relaxação sob tensão para o modelo de Zener
simplificado. Assim, o módulo da relaxação sob tensão do material em função do tempo
t, G(t), deve ser calculado considerando-se não apenas o elemento elástico linear GR,
mas também a resposta de cada elemento individual do modelo de Zener generalizado
com o tempo t, como demonstra a equação a seguir:
∑=
⎟⎟⎠
⎞⎜⎜⎝
⎛ −+=
m
i iiR
tGGtG1
exp)(λ
(2.85)
A análise das Eqs. (2.81), (2.84) e da Figura 2.14 demostra o termo Gi é
equivalente ao termo GD de cada mola associada em série com o pistão.
Quando m tende a infinito, todo o domínio da função G(t) é mapeado. Em outras
palavras, o passo da discretização do domínio é infinitesimal e passa a ser representado
por um intervalo convexo [0,+∞]. Portanto, o módulo de relaxação em função do tempo
G(t), passa a ser melhor representado pela integral de uma função H(λ), cujo o domínio
é este intervalo. Esta função é denominada espectro do tempo de relaxação.
λλ
λ dtHGtG R ∫∞
⎟⎠⎞
⎜⎝⎛ −+=
0
exp)()( (2.86)
42

Neste caso, para qualquer Gi existe uma área infinitesimal H(λ)dλ associada, que define
a concentração de elementos de Maxwell com tempo de relaxação entre λ e λ + dλ. Na
prática, como discutido anteriormente, é mais conveniente se trabalhar com o tempo na
escala logarítmica. Portanto, um novo espectro de tempo de relaxação H(λ) é definido,
onde H(λ)d(lnλ) está associado ao módulo de relaxação sob tensão dos elementos que
possuem tempo de relaxação entre ln(λ) e lnλ + d(ln λ).
Assim, G(t) é expresso por:
)(lnexp)()(0
λλ
λ dtHGtG R ∫∞
⎟⎠⎞
⎜⎝⎛ −+= (2.87)
O espectro do tempo de relaxação pode ser calculado utilizando o método da
transformada de Laplace ou de Fourier, através de medições sucessivas dos módulos de
relaxação sob tensão. É importante considerar que os espectros de tempo de relaxação
são apenas uma descrição matemática do comportamento macroscópico, e não tem
necessariamente uma interpretação simples em termos moleculares. Não é uma tarefa
simples correlacionar os perfis observados no comportamento de relaxação, tal como o
tempo de relaxação predominante, com um processo molecular específico. Deve ser
também enfatizado que, as interpretações qualitativas em termos moleculares, podem
freqüentemente ser obtidas, diretamente a partir de dados experimentais, sem haver
necessidade de calcular o espectro do tempo de relaxação.
43

2.7 – Propriedades Reológicas em Regime Oscilatório
As propriedades reológicas podem ser determinadas em regime oscilatório ou
dinâmico de cisalhamento de pequena amplitude. Neste caso, a tensão de cisalhamento
(ou deformação) aplicada varia oscilatoriamente com a freqüência. A amplitude da
tensão ou deformação de cisalhamento aplicada deverá ser pequena para que as medidas
situem-se dentro do regime de viscoelasticidade linear. Essas propriedades são
conhecidas também como propriedades viscoelásticas lineares (Bretas, 2000).
Dentre estas, destacam-se o Módulo Elástico de Armazenamento – G’ e o
Módulo Elástico de Perda – G’’, os quais serão mais detalhados a seguir.
2.7.1 – Módulo de Armazenamento G’ e Módulo de Perda G’’
Um procedimento experimental alternativo para o ensaio de relaxação sob
tensão é submeter a amostra a uma deformação alternada e simultaneamente medir a
tensão. Para um comportamento viscoelástico linear, quando o equilíbrio é alcançado,
tanto a tensão quanto a deformação variam senoidalmente, portanto (Ward, 1985):
)(0
0
δϖσσϖγγ
+==
tsentsen
(2.88)
Como os polímeros fundidos são viscoelásticos e as deformações são de pequena
amplitude, as tensões resultantes oscilarão com a mesma freqüência ϖ da deformação,
mas estarão defasadas de um ângulo de fase δ, conforme mostra a Figura 2.15. As
propriedades em regime oscilatório podem ser determinadas, por exemplo, através de
44

uma geometria de placas paralelas, no qual uma das placas se movimenta de forma
oscilatória.
Tempo
0 τ0
0
e0
e0
Figura 2.14 – Fluxo Oscilatório em Cisalhamento
Eq. (2.88) pode ser reescrita da seguinte forma: A
δϖσδϖσσ sencoscossen tt 00 += (2.89)
Pode ser verificado que a tensão σ é constituída por duas componentes: uma de
agnitude 0 0 m σ cosδ, em fase com a deformação; e a outra de magnitude σ senδ, fora de
fase com a deformação. A relação tensão-deformação pode, portanto, ser definida por
uma grandeza denominada módulo de armazenamento G’, em fase com a deformação, e
por uma outra grandeza denominada módulo de perda G’’, 90o fora de fase com a
deformação. Isto é:
δγσ
cos'0
0=G e δγσ
senG0
0'' = (2.90)
Assim, a tensão pode ser reescrita como:
45

tGtsenG ϖγϖγσ cos''' 00 += (2.91)
A inspeção da equação acima sugere uma representação complexa para o
módulo, como apresentado na Figura 2.16. Para uma representação esquemática em
função de números complexos, pode-se esboçar um gráfico no plano complexo da
seguinte forma (Kreyszig, 1993):
G*
δ
G``
G`
Figura 2.15 – O módulo Complexo
A abscissa representa a parte real do Módulo Complexo de Relaxação sob
Tensão G*, enquanto que a ordenada representa a parte imaginária do módulo. Através
da análise do gráfico acima, pode-se estabelecer a seguinte relação entre os módulos:
G* = G´ + iG´´ (2.92)
O sistema de coordenadas cartesianas leva em consideração que ambos os eixos
possuem a mesma unidade. Portanto, para cada ângulo δ haverá um ponto G* com as
coordenadas (G´ e G´´). Sendo assim, através da Figura 2.16 associada à Eq. (2.90)
pode-se estabelecer a seguinte relação algébrica para o cálculo do Módulo Complexo:
⎟⎟⎠
⎞⎜⎜⎝
⎛+=+=
22
20
2022 cos´´´* δδ
γσ
senGGG Logo: 0
0*γσ
=G
(2.93)
Observa-se que a Eq. (2.93) representa também, uma descrição da Lei de Hooke
para o cálculo do Módulo Complexo de Relaxação sob Tensão G*.
46

A tangente do ângulo δ é facilmente obtida pela razão entre G’’ e G´, visto que o
primeiro é o cateto oposto e o segundo, o cateto adjacente.
´´´tan
GG
=δ (2.94)
Com o objetivo de facilitar a abordagem matemática do problema, pode se
utilizadar a fórmula de Ëuler descrita na equação a seguir. Este método funciona como
uma ferramenta através da qual os números complexos em coordenadas polares são
correlacionados com números complexos em sua forma exponencial, visto que esta
última forma é muito mais fácil de ser trabalhada.
yiyiy sencosexp += (2.95)
A parte real do módulo G´, no qual a tensão está em fase com a deformação é
geralmente denominada de Módulo de Armazenamento, porque define a energia
armazenada na amostra, energia elástica, devido à deformação aplicada. Já a parte
imaginária do módulo, G´´, relacionada à tensão fora de fase com a deformação, define
a energia dissipada sendo chamado de Módulo de Perda.
Na maioria dos casos, G’’ é pequeno comparado ao G’. Portanto, G* é
aproximadamente igual ao G’’. Às vezes, o módulo complexo G* é considerado como
sendo o próprio G’. O ângulo δ também pode ser considerado aproximadamente igual a
sua tangente, quando o módulo de perda G´´ for pequeno.
47

2.7.2 – O Modelo de Zener em função da Freqüência
Como o modelo de Zener é um modelo viscoelástico linear, este obedece ao
Princípio de Superposição de Boltzmann (PSB), já descrito anteriormente.
Considerando-se que a variação da tensão com a deformação é uma função contínua, ou
um experimento virgem em λ = 0, no qual todo histórico prévio de tensões foi
esquecido, a forma integrada do PSB pode ser aplicada diretamente, quando se estuda a
propriedade reológica em regime oscilatório. Sendo assim, considerando apenas os
termos que variam em função do tempo t, a Eq. (2.18) pode ser reescrita em função de
um tempo τ da seguinte forma:
∫ −=t
dddtGt
0
)()( ττγτσ (2.96)
O limite inferior da integral acima é sempre o instante no qual a deformação é
iniciada. Então, considerando um fluxo em que a deformação de cisalhamento γ varia
com tempo de forma senoidal (ou cossenoidal), matematicamente obtêm-se as seguintes
condições de contorno:
γ = 0 para τ < 0 dγ /dτ = 0
γ = γ 0sen(ϖτ) para τ > 0 dγ /dτ = γ 0ϖcos(ϖτ) (2.97)
onde γ 0 é a amplitude da deformação positiva e ϖ é a freqüência.
O termo cos y é dado, através da fórmula de Ëuler (Eq. 2.95), por:
2)exp(expcos iyiyy −+
= (2.98)
Aplicando-se Ëuler na Eq. (2.97), a mesma pode ser reescrita na forma de um número
complexo, constituído pela parte real e imaginária.
⎟⎠⎞
⎜⎝⎛ −+
=2
)exp(exp0
ωτωτωγτγ ii
dd (2.99)
48

O módulo da relaxação sob tensão estabelecido na Eq. (2.81), pode ser reescrito
com uma defasagem de um tempo τ como demonstrado a seguir. Segundo a Eq. (2.84),
a diferença entre os módulos GU e GR pode ser substituída pelo termo GD. Portanto:
⎟⎠⎞
⎜⎝⎛ +−+=−
λτ
λτ tGGtG DR exp)( (2.100)
Substituindo as Eqs. (2.99) e (2.100) no PSB descrito na Eq. (2.96), obtém-se:
τϖτϖτϖγλτ
λσ ∫ ⎥
⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ −+
⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ +−+=
t
DR diitGGt0
0 2)exp()exp( exp)( (2.101)
Retirando-se os termos constantes que não variam com o tempo da integral, e
aplicando-se a propriedade distributiva na expressão acima, a mesma pode ser reescrita
da seguinte maneira:
τϖτλτϖτ
λτϖτϖτ
ϖγσ ∫ ⎥
⎦
⎤⎢⎣
⎡−⎟
⎠⎞
⎜⎝⎛ +−
+⎟⎠⎞
⎜⎝⎛ +−
+−+=t
DDRR ditGitGiGiGt0
0 )exp(exp)exp(exp)exp()exp(2
)(
(2.102)
Analisando a integral acima, a mesma pode ser reescrita de maneira que o
produto das duas potências exponenciais de mesma base seja igual a mesma base
elevado ao somatório dos expoentes da potência.
λϖλτϖτ
λτϖτ
λτ )1(expexp)exp(exp ititit ++−
=++−
=⎟⎠⎞
⎜⎝⎛ +−
λϖλτϖτ
λτ )1(exp)exp(exp itit −+−
=−⎟⎠⎞
⎜⎝⎛ +− (2.103)
O termo GR também pode ser reescrito na Eq. (2.102) em evidência,
)exp()exp( ϖτϖτ iGiG RR −+ = [ ])exp()exp( ϖτϖτ iiGR −+ (2.104)
49

As Eqs. (2.103) e (2.104) podem ser substituídas na Eq. (2.102). A constante ½
retorna a integral de maneira que a fórmula de Ëuler possa ser aplicada novamente,
resultando em:
[ ]∫ ⎥⎦
⎤⎢⎣
⎡ −+−+
++−+
−+=
tDD
R ditGitGiiGt0
0 )1(exp2
)1(exp22
)exp()exp()( τλ
ϖλτλ
ϖλτϖτϖτϖγσ
(2.105)
Aplicando-se a fórmula de Ëuler, e colocando em evidência o termo
⎟⎠⎞
⎜⎝⎛ −λ
tGD exp2
, obtém-se:
τλ
ϖλτλ
ϖλτλ
ϖτϖγσ ∫⎭⎬⎫
⎩⎨⎧
⎥⎦⎤
⎢⎣⎡ −
++
⎟⎠⎞
⎜⎝⎛ −+=
tD
R diitGGt
00 )1(exp)1(expexp
2)cos()( (2.106)
A integral pode ser parcialmente calculada, denominado I o segundo termo da
integral, para posterior integração. O termo ⎟⎠⎞
⎜⎝⎛ −λ
tGD exp2
não varia no intervalo de 0 a
τ, portanto pode ser considerado constante. Como a integral de co-seno é o seno, tem-se
que:
ItGsenGt D
R ⎟⎠⎞
⎜⎝⎛ −+=λ
ϖγϖτγσ exp2
)()( 00 (2.107)
Onde ∫ ⎥⎦⎤
⎢⎣⎡ −
++
=t
diiI0
)1(exp)1(exp τλ
ϖλτλ
ϖλτ (2.108)
A integral I acima pode ser simplificada atribuindo os termos constantes a uma
única constante k, ou seja, os termos que não variam com o tempo podem ser
representados da seguinte maneira:
λϖλ )1(
1ik +
= e λϖλ )1(
2ik −
= (2.109)
50

Portanto a integral é facilmente resolvida pelo método da substituição, como
demonstrado a seguir:
∫t
dk0
1exp ττ Chamando 1kz τ= , dz/dτ=k1 logo dτ= dz/ k1 (2.110)
tt
zkk
dzz0
10 1
exp1exp =∫ (2.111)
Substituindo o valor de z da Eq. (2.110) na Eq. (2.111), utilizando-se o mesmo
procedimento para a segunda parcela da integral.e aplicando-se as condições do limite
de integração da equação acima, obtém-se como resultado a seguinte expressão:
I = ( ) ⎟⎟⎠
⎞⎜⎜⎝
⎛−+⎟⎟
⎠
⎞⎜⎜⎝
⎛−=+∫
22
2
11
1
021
1exp1expexpexp
kktk
kktk
dkkt
τττ (2.112)
Esta equação pode ser reescrita da seguinte forma:
I = 21
1
21
21
21
2
21
12 expexpkk
kkk
tkkkk
kkk
tkk−+− (2.113)
Substituindo os valores de k1 e k2 da Eq. (2.109) na equação acima, obtém-se:
I =
2
222 )1(
)1()1(exp)1()1()1(exp)1(
λϖλ
λϖλ
λϖλ
λϖλ
λϖλ
λϖλ
λϖλ
i
iitiiiti
−
+−
−++
−−
+−
(2.114)
Realizando-se as simplificações necessárias, tal como o cancelamento da
constante λ de todos os denominadores e a parte imaginária do número complexo i2
com valor real de -1, a divisão de duas frações pode ser reescrita como o produto da
primeira pelo inverso da segunda. Portanto o valor da integral I apresenta a seguinte
expressão:
51

⎥⎦
⎤⎢⎣
⎡+−⎟
⎠⎞
⎜⎝⎛ −
++−−⎟⎠⎞
⎜⎝⎛ +
−+
= )1(1exp)1()1(1exp)1(1 22 ϖλ
λϖλϖλϖλ
λϖλϖλ
ϖλλ iitiiitiI
(2.115)
O termo ϖλi pode também ser cancelado na equação acima e a exponencial
pode ser reorganizada da seguinte forma:
( )titit ϖλλ
ϖλ expexp1exp ⎟⎠⎞
⎜⎝⎛=⎟
⎠⎞
⎜⎝⎛ +
( titit ϖλλ
ϖλ−⎟
⎠⎞
⎜⎝⎛=⎟
⎠⎞
⎜⎝⎛ − expexp1exp ) (2.116)
Desta forma, o termo ⎟⎠⎞
⎜⎝⎛λtexp pode ser colocado em evidência originando a
seguinte expressão:
( )[ ]⎭⎬⎫
⎩⎨⎧
−+−+−⎟⎠⎞
⎜⎝⎛
+= 2)1)(exp()1(expexp
1 22 ϖλϖϖλϖλϖλ
λ itiititI (2.117)
Aplicando-se Ëuler novamente, o termo da exponencial de um número
complexo pode ser substituído pelas funções trigonométricas seno e co-seno, portanto,
trabalhando-se apenas com os termos no interior dos colchetes obtém-se a seguinte
equação:
( ) ( ) ( ) )1(sincos)1(sincos)1)(exp()1(exp ϖλϖϖϖλϖϖϖλϖϖλϖ itititititiiti +−+−+=+−+−
(2.118)
Aplicando-se a propriedade distributiva e efetuando algumas simplificações, é
possível concluir que:
( ) tititiiti ϖλϖϖϖλϖϖλϖ sin2cos2)1)(exp()1(exp 2−=+−+− (2.119)
52

Substituindo a Eq. (2.119) na Eq. (2.117), obtém-se:
[⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
−−⎟⎟⎠
⎞⎜⎜⎝
⎛+
= 2)sin2cos2exp1
222 tittI
e
ϖλϖϖτϖλ
λ ] (2.120)
Reescrevendo-se a Eq. (2.120), obtém-se:
[⎭⎬⎫
⎩⎨⎧
−+⎟⎠⎞
⎜⎝⎛
+= 1)sincosexp
12
22 tttI ϖλϖϖλϖλ
λ ] (2.121)
Substituindo I Eq. (2.121) na Eq. (2.107), gera a seguinte expressão,
[ ] ⎟⎟⎠
⎞⎜⎜⎝
⎛
⎭⎬⎫
⎩⎨⎧
−+⎟⎠⎞
⎜⎝⎛
+⎟⎠⎞
⎜⎝⎛ −+= 1)sincosexp
12exp
2)()( 2200 ttttG
tsenGt DR ϖλϖϖ
λϖλλ
λϖγϖγσ
(2.122)
cuja reorganização gera::
⎟⎟⎠
⎞⎜⎜⎝
⎛−⎟
⎠⎞
⎜⎝⎛+⎟
⎠⎞
⎜⎝⎛
⎟⎠⎞
⎜⎝⎛ −
++= 1expexpcosexp
1)()( 22
00 λ
ϖλϖλ
ϖλϖλ
ϖλγϖγσ ttsentttG
tsenGt DR
(2.123)
Logo:
⎟⎠⎞
⎜⎝⎛ −
+−
++
++=
λϖλϖλγϖ
ϖλϖλγϖ
ϖλλϖγϖγσ tGtsenGtGtsenGt DDD
R exp11
cos1
)()( 220
22
220
220
0
(2.124)
Agrupando-se os termos que possuem em comum a expressão sen(ϖt), e de
acordo com a Eq. (2.84), deriva-se a seguinte expressão:
( ) ( ) ( ) ⎟⎠⎞
⎜⎝⎛ −
+−−
+−+⎥
⎦
⎤⎢⎣
⎡+
−+=λϖλ
λϖγϖϖλ
λϖγϖϖλ
ϖλγσ tGGtGGtsenGGGt RURURUR exp1
cos1
)(1
)( 22022022
22
0
(2.125)
O módulo da tensão em função do tempo é descrito pela Eq. (2.125). Os dois
primeiros termos da expressão constituem a resposta no estado estacionário.
53

Os termos sen(ϖt) e cos(ϖt), representam as tensões em fase e 90o fora de fase
com a deformação, respectivamente. Conseqüentemente, analisando a Eq. (2.91), é
possível estabelecer uma relação entre os parâmetros dinâmicos do experimento,
módulo de armazenamento G’ e módulo de perda G’’, com a freqüência. Portanto:
( ) 22
22
1'
ϖλϖλ
+−+= RUR GGGG (2.126)
( ) 221''
ϖλλϖ+
−= RU GGG (2.127)
Para fluídos poliméricos, o módulo de relaxação em equilibrio GR pode ser
negligenciado, e como GU – GR = GD, as equações acima podem ser reescritas da
seguinte maneira:
22
22
1'
ϖλϖλ
+= DGG (2.128)
221''
ϖλλϖ
+= DGG (2.129)
O terceiro termo da Equação (2.125) mostra o decaimento da tensão dentro de
um tempo de relaxação λ.
A determinação do espectro discreto de relaxação é baseada nas Eq. (2.118) e
(2.119) fundamentais, como será discutido nos capítulos posteriores.
54

CAPÍTULO 3
FORMULAÇÃO DO PROBLEMA DE OTIMIZAÇÃO
O espectro de relaxação de polímeros H(λ) pode ser obtido a partir de dados
experimentais do módulo de armazenamento G’ e do módulo de perda G’’, como
descrito no Capítulo 2. Através da otimização de dados experimentais é possível estimar
um conjunto de parâmetros módulos de relaxação sob tensão Gk e os tempos de
relaxação λk correspondentes, obtendo-se o espectro de relaxação discreto. A
determinação da função-objetivo que possibilita a obtenção do espectro de
relaxaçãoserá discutida a seguir.
3.1 – O Problema de Otimização
Os dados mecânicos dinâmicos contêm todas as informações necessárias para a
obtenção do espectro de relaxação, H(λ). A análise mecânica dinâmica fornece
informações sobre as propriedades reológicas em regime oscilatório ou dinâmico de
cisalhamento de pequena amplitude, ou seja, nos quais a tensão de cisalhamento (ou
deformação) aplicada varia com a freqüência.
Através desta técnica experimental, torna-se possível obter o módulo de
armazenamento em cisalhamento G’ e o módulo de perda em cisalhamento G’’, em
função da freqüência ϖ:
22
22
1)('
ϖλϖλϖ
+= DGG (3.1)
55

221)(''
ϖλλϖϖ+
= DGG (3.2)
Como visto no Capítulo 2, o modelo de Zener generalizado é aquele que melhor
se aproxima da física do problema. Neste modelo, para um dado conjunto de modelos
de Maxwell, unidos em paralelo, cada sistema apresenta um módulo de relaxação sob
tensão GD característico associado a um tempo de relaxação λ. O módulo de
armazenamento assim como o módulo de perda podem ser calculados teoricamente
como um somatório de cada conjunto de parâmetros do modelo de Maxwell constituinte
do modelo de Zener generalizado, expressos da seguinte forma:
∑= +
=n
k k
kk
teo GG1
22
22
1)('
ϖλϖλ
ϖ (3.3)
∑= +
=n
k k
kk
teo GG1
221)(''
ϖλϖλ
ϖ (3.4)
onde Gk representa o módulo de relaxação GD de cada modelo de Maxwell.
Quando n torna-se arbitrariamente grande todo o domínio da função G(ϖ) é
mapeado. Em outras palavras, o passo da discretização do domínio é infinitesimal e
passa a ser representado por um intervalo convexo [0,+∞]. Portanto, os módulos de
armazenamento G’(ϖ) e de perda G’’(ϖ) em função da freqüência, são melhor
representados pela integral de uma função H(λ), cujo o domínio é este intervalo. Esta
função é denominada espectro do tempo de relaxação. Assim, pode-se escrever (Ward,
1985):
λϖλ
ϖλλϖ dHG 22
22
0 1)()('+
= ∫∞
(3.5)
λϖλ
λϖλϖ dHG 220 1
)()(''+
= ∫∞
(3.6)
56

onde para qualquer Gk existe uma área infinitesimal H(λ)dλ associada, que define a
concentração de elementos de Maxwell com tempo de relaxação entre λ e λ + dλ.
Há uma série de razões para se escolher dados experimentais de G’ e G’’ ao
invés de parâmetros obtidos através de outros experimentos, dentre os quais se
destacam:
- rápido desenvolvimento no estado quase-estacionário, para intervalos de tempo de
ϖπ /2≈∆t ;
- teste seletivo para modos de relaxação próximos a ϖλ /1= ;
- não há problemas de sinal/ruído no transdutor;
- os dados de G’ e G’’ contém as mesmas informações (com diferentes pesos);
- há uma relação entre ambos (Relação de Kramers-Kroning) que permite uma
checagem consistente dos dados do módulo de armazenamento G’ e de perda G’’:
⎟⎠⎞
⎜⎝⎛≅
ϖϖπϖ
ln)('
2)('''
ddGG ; e (3.7)
- a limitação de uma janela de tempo é finita (evita problema de truncagem).
Outros experimentos efetuados na faixa da viscoelásticidade linear vêm servindo
como fonte para determinação de H(λ), principalmente os de módulo de relaxação e
compliância em “creep”. As informações provenientes destas funções, entretanto, são
geralmente limitadas devido a problemas mal-postos. Não é possível determinar G’ e
G’’ a partir de G(t), o contrário, entretanto, é verdadeiro. A determinação do módulo de
relaxação G(t) é normalmente acurada. Com a utilização dos reômetros atuais, é
possível a determinação de G(t) a partir de dados de G’ e G’’ com mais acurácia do que
através da determinação direta em um ensaio de deformação sob tensão.
57

Várias técnicas vêm sendo propostas na literatura para determinação do espectro
discreto de relaxação a partir de dados experimentais dos módulos de armazenamento e
perda (Orbey, 1991). Neste trabalho será utilizado um método de regressão não-linear
para determinação de N valores de Gk e λk, utilizando as Eq. (3.3) e (3.4) a partir de um
conjunto de M dados experimentais de módulos de armazenagem G’(ϖ)exp e de perda
G’’(ϖ)exp em função da freqüência. Estes valores podem ser determinados facilmente
resolvendo-se o seguinte problema de otimização, com restrições, destacado na Figura
3.1 a seguir:
Sujeito a: ⎪⎩
⎪⎨⎧
=∀≤≤
=∀≤≤
NkGGG
Nk
kkk
kkk
...3,2,1
...3,2,1maxmin
maxmin λλλ
Min 2
122exp
2
1 122
22
exp 1)(''11
1)´(111
⎥⎦
⎤⎢⎣
⎡
+−+⎥
⎦
⎤⎢⎣
⎡
+−= ∑∑ ∑
== =
N
k ik
ikk
i
M
i
N
k ik
ikk
k
GG
GGM
fϖλ
ϖλϖϖλ
ϖλϖ
Figura 3.1 – O problema de otimização
Foi observado, através de testes com diferentes números N de modelos de Maxwell,
o decaimento da função-objetivo acima com o aumento do número de modelos
empregado. Como será abordado no Capítulo 5, constatou-se que o valor da função-
objetivo permanece constante a partir de um número fixo de modelos. Assim, optou-se
pela utilização de 6 (seis) modelos de Maxwell para o cálculo de G’(ϖ) e G’’(ϖ)
teóricos, uma vez que a regressão obtida com mais informações apresentou o mesmo
valor da função-objetivo.
Os dados experimentais de G’(ϖ) e G’’(ϖ) serão obtidos futuramente no
equipamento Rheometric Scientific, Modelo SR5, locado no Laboratório de Tecnologia
de Polímeros do Instituto Politécnico, uma vez que tal equipamento não possui software
58

específico para determinação do espectro de relaxação. Este equipamento fornece dados
como os apresentados abaixo para o polietileno linear de baixa densidade.
Tabela 3.1 – Resultados G’(ϖ) e G’’(ϖ) para o LLDPE
Freqüência ϖ, (rad/s)
Módulo de Armazenamento G’ (Pa)
Módulo de Perda G’’ (Pa)
0,1 96,1354 971,610 0,15849 161,106 1427,55 0,25119 302,278 2161,03 0,39811 557,162 3261,54 0,63096 1003,17 4895,73
1,0 1749,07 7254,96 1,58489 2990,5 10595,3 2,51189 5019,95 15217,8 3,98107 8266,98 21599,4 6,30957 13223,4 29985,8
10,0 20660,5 40988,6 15,8489 31546,3 54765,1 25,1189 47137,2 71292,6 39,8107 68293,7 91048,3 63,0957 96887,4 111560,0 100,0 138360,0 1438560,0
O equipamento é perfeitamente ajustável para obtenção de mais ou menos
pontos, dependendo do tipo de análise. Os dados assim obtidos, valores de G’(ϖ) e
G’’(ϖ) experimentais para uma determinada faixa de freqüência, alimentam a função-
objetivo, de 1 até M, destacada no Quadro 3.1. Os métodos numéricos para resolução
deste problema, os quais serão discutidos com maiores detalhes no Capítulo 4, calculam
valores de G’(ϖ) e G’’(ϖ) teóricos para uma mesma freqüência, a partir de valores
aleatórios de Gk e λk fornecidos pelo programa desenvolvido. Os parâmetros obtidos
serão considerados ótimos ao tornarem o valor da função-objetivo nula.
59

CAPÍTULO 4
MÉTODOS NUMÉRICOS UTILIZADOS
Nesta seção serão apresentados dois métodos estocásticos de otimização global,
utilizados na determinação do espectro de relaxação. Os métodos estocásticos, apesar de
apresentarem facilidades de implementação computacional, consomem maiores tempos
de computação (em relação a algoritmos determinísticos de otimização) e dependem de
parâmetros que variam de um problema para outro.
Neste trabalho, optou-se pela utilização de dois métodos estocásticos de
otimização global para a resolução do problema de minimização do desvio-padrão da
função-objetivo (com vistas a determinação do espectro de relaxação de polímeros): o
método Simulated Annealing (SA) (Kirkpatrick et al., 1983) e um método de busca
aleatória baseado no algoritmo de Luus e Jaakola (1973).
Além disto, será apresentada resumidamente a metodologia de interpolação
lagrangeana, utilizada na determinação de um espectro contínuo a partir do espectro de
relaxação discreto.
4.1 O Algoritmo Simulated Annealing
O algoritmo Simulated Annealing foi proposto por Kirkpatrick et al. (1983),
sendo aplicado para dois problemas combinatoriais clássicos: o “problema do caixeiro-
viajante” (“travelling salesman problem”, comumente referenciado como problemas
TSP na área de otimização combinatorial) e o projeto de circuitos integrados em larga
escala (VLSI). Paralelamente, o conceito de annealing foi aplicado em otimização
combinatorial por Cerny (1985).
60

4.1.1 Analogia com o Processo Físico de Annealing
Em física da matéria condensada, o processo de annealing (recozimento) é
conhecido como um processo térmico para obter-se configurações de baixa energia para
um sólido em um banho de aquecimento. Este processo é constituído de dois passos
básicos:
- Aumentar a temperatura do banho de aquecimento a um valor máximo, onde o
sólido se funde;
- Diminuir cuidadosamente a temperatura do banho de aquecimento até que os
átomos rearrangem-se de modo que a configuração seja de mínima energia.
Cabe observar que, caso o resfriamento não seja feito de maneira suficientemente
lenta, as partículas serão rearranjadas em uma configuração que não é a de mínima
energia. O processo oposto ao annealing é o quenching (têmpera), onde a temperatura
do banho é instantaneamente diminuída.
O processo físico do annealing pode ser simulado computacionalmente,
conforme demonstrado por Metropolis et al. (1953), dando início a uma série de
algoritmos denominados técnicas de Monte Carlo.
O algoritmo Simulated Annealing baseia-se em uma analogia entre um sistema
físico de muitas partículas e um problema de otimização, com as seguintes
equivalências:
- Soluções de um problema de otimização são equivalentes a um estado
(configuração) de um sistema físico;
- O valor da função-objetivo de uma solução é equivalente à energia de um estado.
Portanto, se o método for conduzido de maneira adequada, possibilitará a obtenção
de um valor mínimo de função-objetivo, em perfeita analogia com o sistema físico.
61
4.1.2. Convergência Assintótica do Algoritmo Simulated Annealing
O conceito de Cadeias de Markov tem sido utilizado para demonstrar a
convergência assintótica do algoritmo Simulated Annealing, uma vez que o resultado de
uma tentativa de “movimento” do algoritmo pode ser entendido como uma transição em
uma Cadeia de Markov. Assim como ocorre nas Cadeias de Markov, o resultado de uma
tentativa em particular depende somente do resultado da tentativa anterior (e não do que
ocorre no início do processo). Desta maneira, o algoritmo Simulated Annealing não
deve ser sensível a estimativas iniciais.
Com base nestas idéias, Aarts e Korst (1989) demonstram que o algoritmo
Simulated Annealing, formulado como uma Cadeia de Markov, converge para a solução
ótima (mínimo global), se o “resfriamento” for feito de maneira lenta o suficiente. A
prova deste teorema está fora do escopo da presente pesquisa, e é apresentada em Aarts
e Korst (1989). De fato, em problemas práticos, o método pode eventualmente
convergir para mínimos locais, indicando problemas no procedimento de resfriamento.
4.1.3. Utilização do Algoritmo Simulated Annealing
Tendo em vista os fatos apresentados, observa-se que o algoritmo Simulated
Annealing - SA é um dos muitos métodos de aproximação heurística empregado para
prever pontos de mínimo, não necessariamente globais, de uma função objetivo, com
um tempo computacional razoável (outros métodos de aproximação podem ser
utilizados para a mesma finalidade; por exemplo, consultar Salcedo et al., 1990; Törn et
al., 1999). O algoritmo SA apresenta mais opções de busca do que os algoritmos de
descida. Um simples modelo de algoritmo de descida começa com uma estimativa
inicial (chamada solução inicial), então, um ponto numa vizinhança desta solução é
62

gerado, por algum mecanismo adequado, e a alteração na função objetivo é calculada.
Se o ponto gerado promover um decréscimo em ƒ, então a solução corrente é repassada
para a nova solução, e conseqüentemente a solução prévia é retirada. O processo é
repetido até não promover progresso na função-objetivo para pontos numa vizinhança
da solução corrente. Deste modo, os algoritmos de descida podem terminar num
mínimo local (o que de fato ocorre em diversos problemas). Apesar da popularidade
desta classe de algoritmos, uma clara desvantagam reside no fato de que o ponto de
mínimo local identificado talvez esteja longe do mínimo global; e não ser um “vizinho”
do mínimo global. Um modo de melhorar a solução é aplicar o algoritmo de descida
diversas vezes, começando com diferentes soluções iniciais e selecionando o melhor
ponto encontrado (isto é, aquele que produz o menor valor na função-objetivo). Tal
estratégia também não promove boas garantias de que ao menos a vizinhança do ótimo
global foi atingida.
Por outro lado, o algoritmo SA – em sua gênese – foi concebido de maneira
aceitar (alguns) movimentos que levam a um aumento da função-objetivo, e assim é
capaz de “escapar” de regiões de mínimo local, procurando pontos de mínimo em toda
região do domínio. A aceitação destes pontos de subida é feita de forma controlada,
seguindo o critério probabilístico do tipo distribuição de Boltzmann (ver Corana et al.,
1987, e Eglese, 1990; outras estatísticas de aceitação são também possíveis, ver, por
exemplo, Ahón et al., 2000). A aceitação ou rejeição destes movimentos, numa direção
ascendente, é determinada pela geração de uma seqüência de números aleatórios,
estabelecidos pelos critérios de aceitação do controle probabilístico previamente
mencionado. A função que determina a aceitação provável para um movimento que
causa um aumento na função objetivo ƒ é chamada função de aceitação e é
normalmente expressa por ( ∆fT−exp ) , onde T é o parâmetro de controle, que é análogo
para o correspondente físico do annealing à temperatura do banho. A característica
63

desta função faz com que pontos que promovam “pequenos aumentos” da função-
objetivo tenham grande probabilidade de aceitação, em oposição ao que ocorre com
pontos que promovam grandes aumentos da função-objetivo. A função ( )∆fT−exp
também permite, para valores altos de T, que muitos movimentos de subida sejam
aceitos (de modo a evitar mínimos locais). Contudo, quando T aproxima-se de zero,
movimentos com esta propriedade devem ser rejeitados. Desta forma, o algoritmo SA é
iniciado com valores altos de T, prevenindo-se de uma parada prematura no primeiro
mínimo local encontrado.
Os passos básicos do algoritmo SA estão resumidos no Algoritmo 4.1 (Jensen,
2002), onde as variáveis utilizadas estão descritas na Tabela 4.1.
Tabela 4.1. Variáveis utilizadas no Algoritmo SA.
Parâmetro Significado
N Número Total de ajustes de Parâmetros NS Número Máximo de Ciclos NT Número Máximo de Iterações antes da RT T0 Temperatura Inicial RT Fator de Redução de Temperatura EPS Erro de Tolerância para o Término do Algoritmo LB Limite Inferior para os Parâmetros UB Limite Superior para os Parâmetros
64

begin
while EPS > Critério de término, do
for NT variando de 1 a NT, do
for NS variando de 1 a NS, do
for N variando de 1 a N, do
Testes randômicos para pontos x’
x’(N) = x(N) + r(N)V(N)
if x’(N) < LB ou x’(N) > UB then
Descarte x’(N) e gere outro ponto
else
Calcula f(x’)
end if
if f(x’) > f(x), then
Aplique o Critério de Metropolis
Calcule ⎟⎠⎞
⎜⎝⎛ −
=T
fffP 'exp)(
Gere o número randômico P’ ∈ [0,1]
if P´< P então
Vetor aceito.
else
Vetor rejeitado.
end if
else
Aceite o ponto de descida e atribua a x’(N) como novo ótimo
end if
end for
end for
Ajuste o tamanho do passo para cada parâmetro
end for
Diminuição da temperatura
T = T RT
end while
end
Figura 4.1 – Estrutura simplificada do algoritmo SA em Código Fortran-77
[adaptado de Jensen, 2002]
65

Inicialmente, valores iniciais para as componentes do vetor de variáveis
independentes, x(N), contidas na função f são estimados, assim como um valor para o
parâmetro temperatura, T0; a função f é, então, calculada. Um novo vetor x’(N) é gerado
a partir do anterior, e um novo valor da função f é então calculado. Se o valor da função
f nesta iteração for menor que o valor obtido anteriormente, o vetor é aceito; caso
contrário, o critério de Metropolis é aplicado.
4.2. Métodos de Busca Aleatória
Luus e Jaakola (1973) apresentaram um método de otimização (denominado
usualmente como algoritmo LJ) para problemas de otimização não-linear (NLP)
baseado em uma busca aleatória. Em síntese, o procedimento desenvolvido por Luus e
Jaakola envolve dois passos:
1. Para um número especificado de interações, calcular
rZxx += * (4.1)
onde *x é o ótimo corrente, Z é uma matriz diagonal com elementos aleatórios entre
-1,0 e +1,0 e r é um vetor contendo os raios das regiões de busca para as variáveis do
problema;
2. Ao final do número de interações especificadas no passo 1, *x é substituído pelo
melhor valor obtido no passo anterior, e a região de busca é contraída através de
uma expressão do tipo:
)()1( )1( jj rr ε−=+ (4.2)
onde ε é um número próximo de zero.
Gaines e Gaddy (1976) modificaram o algoritmo LJ de modo que, a cada
melhora obtida com a equação 4.2, *x fosse imediatamente substituído por x .
66

Salcedo et al. (1990) propuseram um melhoramento aos algoritmos
desenvolvidos por Luus e Jaakola (1973) e Gaines e Gaddy (1976) através da
incorporação de uma estratégia para “escapar” de ótimos locais. Segundo estes autores,
a estratégia desenvolvida mostrou-se eficiente em problemas com diversos ótimos
locais.
O método de Luus e Jaakola (1973), embora tenha sido aplicado na
determinação do espectro de relaxação, não produziu bons resultados, convergindo,
usualmente, para mínimos locais. De fato, há algumas evidências na literatura de que
este algoritmo está restrito a problemas de tamanhos pequenos e médios. Para o
problema em questão (com 12 variáveis contínuas, se considerarmos 6 modelos de
Maxwell), as características de convergência foram insatisfatórias. Assim, os resultados
obtidos com o algoritmo de Luus e Jaakola (1973) não serão apresentados no capítulo
de resultados. Por outro lado, o método de Luus e Jaakola (1973) apresentou bons
resultados na geração do espectro contínuo a partir do espectro discreto (ajuste de um
problema com somente duas variáveis).
4.3. Interpolação Polinomial A Interpolação Lagrangeana constitui uma ferramenta matemática que permite
usar n valores de y, correspondentes a determinados valores de x, y = f(x), e faz passar
um polinômio de grau (n-1) através dos n pontos escolhidos. No caso do presente
trabalho, deseja-se obter uma curva (espectro de relaxação contínuo H(λ)) a partir de
um conjunto discreto de pontos (Gk em função de λk,). Cabe ressaltar que a técnica de
interpolação polinomial garante que a curva gerada passa sempre por todos os pontos
tabelados, mas não há nenhuma garantia de que o comportamento da curva fora dos
pontos tabelados represente o comportamento real da função que se deseja obter.
67

No caso linear (n=2), encontra-se xk e xk+1 tais que
1+< <k kx x x (4.3)
Já no caso quadrático, encontra-se xk-1, xk e xk+1 tais que
(4.4) 11 +− <<< kkk xxxx
Em geral, escolhe-se n valores de xi de modo que cerca da metade destes xi
sejam menores que x e metade é maior que x. Esta prática, entretanto, não é necessária.
É necessário apenas é garantir que x seja maior que o menor xi e menor que o maior xi.
Conjuntos diferentes de xi produzirão diferentes valores interpolados.
Uma vez feita a escolha dos n pontos, todavia, chama-se estes pontos (x1,y1),
(x2,y2),..., (xn,yn). Para voltar ao caso linear, o ponto (xk,yk) pode ser batizado como
(x1,y1) e o ponto (xk+1,yk+1), como (x2,y2). Esta mudança de nomes é meramente uma
conveniência para evitar algumas complicações com os índices. Para a presente
pesquisa, os valores da interpolação são resultados de um problema de otimização e,
portanto, não podem ser escolhidos a priori.
Um polinômio geral de grau (n-1) pode ser escrito
(4.5) 012
21
1 ...)( axaxaxaxP nn
nn ++++= −
−−
−
Se ele deve passar através de n pontos, então
0112
121
111 ... axaxaxay nn
nn ++++= −
−−
−
0212
221
212 ... axaxaxay nn
nn ++++= −
−−
−
. .
(4.6) 012
21
1 ... axaxaxay inin
nini ++++= −
−−
−
. . 01
22
11 ... axaxaxay n
nnn
nnnn ++++= −
−−
−
Estas são n equações nas n variáveis a0, a1,..., an-1, onde supõe-se que
nxxx ≠≠≠ ...21 . É possível mostrar que elas têm uma única solução.
68

Considere-se primeiramente as equações homogêneas correspondentes
0112
121
11 ...0 axaxaxa nn
nn ++++= −
−−
−
0212
221
21 ...0 axaxaxa nn
nn ++++= −
−−
−
. . (4.7)
.
012
21
1 ...0 axaxaxa nnnn
nnn ++++= −
−−
−
Suponha que este último sistema homogêneo tenha uma solução não-trivial, isto
é, uma solução para a qual nem todos sejam iguais a zero (ai=0). Então o polinômio
representado pela Eq. (4.5) tem n raízes e aquelas raízes são x1, x2,...,xn. Entretanto, um
polinômio de grau (n-1) com n raízes deve ser identicamente nulo, portanto
0... 0121 ===== −− aaaa nn (4.8)
de modo que a única solução é a trivial. Isto contradiz a hipótese de que uma solução
não-trivial existia. Visto que não existe nenhuma solução não-trivial para o sistema
homogêneo – Eq. (4.7) -, segue-se que o sistema não-homogêneo – Eq. (4.6) – tem uma
única solução. Naturalmente, se todos os yi=0 (i = 1,2,...,n) então a solução única é
. Isto não é uma surpresa, visto que, então, todos os n pontos acham-se no eixo
x. Se, pelo menos, um , então não é identicamente nulo.
0)( ≡xP
0≠iy )(xP
Objetivando resolver o sistema não-homogêneo, introduz-se n novas funções,
todas as quais são polinômios de grau (n-1)
69

∏ −−−=1 32 ))...()(()( nxxxxxxx
∏ −−−=2 31 ))...()(()( nxxxxxxx
. . (4.9)
.
∏ −−−−= +−k nkk xxxxxxxxx ))...()()...(()( 111
. . .
∏ −−−−=n nxxxxxxx ))...()(()( 121
ou, mais concisamente,
∏ ∏ (4.10) ≠=
−=i
n
ijj
jxxx1
)()(
com i = 1,2,...,n e onde o ∏ à direita indica, como usualmente, multiplicação
repetida.
É valido ressaltar que:
(4.11) ∏ ≠i ix 0)(
se todos os xi são distintos, conforme suposto, e além do mais
∏ para i ≠ j (4.12) =
i j )x( 0 Pode ser reescrito como uma combinação linear dos produtórios de 1 até n )(xP
∏∏∏ +++= )x(b...)x(b)x(b)x(P nn2211
Ou, novamente de maneira mais concisa
∑ ∏=
=n
iii )x(b)x(P
1
(4.13)
Isto é um polinômio geral de grau (n-1) visto que cada produtório é um polinômio de
grau (n-1) e há n parâmetros arbitrários b1, b2,...,bn.
70

Substituindo xk em (4.13) e usando (4.11) e (4.12), observa-se que
∏= )x(b)x(P kkkk
visto que todos os termos na soma em (4.13), exceto o k-ésimo, irão desaparecer. Mas
)x(Py kk =
assim
∏=
)x(yb
kk
kk
e isto é válido para k=1,2,...,n.
Portanto, (4.13) torna-se
∏∏∑
=
=)x()x(
y)x(Pii
in
ii
1
(4.14)
Alternativamente, poder-se-ia usar (4.10) para escrever a equação anterior como
∏
∏∑
≠=
≠=
= −
−
= n
ijj
ji
n
ijj
jn
ii
)xx(
)xx(
y)x(P
1
1
1
Ou
∏∑≠==
⎟⎟⎠
⎞⎜⎜⎝
⎛
−−
=n
ijj ji
jn
ii xx
xxy)x(P
11
(4.15)
A equação (4.15) é chamada Fórmula de Interpolação de Lagrange e o processo
de usar esta fórmula é chamado Interpolação Lagrangeana.
71

CAPÍTULO 5
RESULTADOS E DISCUSSÕES
Neste capítulo serão discutidas as estratégias para validação da ferramenta
computacional desenvolvida neste trabalho, sua aplicação às análises reológicas de um
material polimérico e a obtenção do espectro de relaxação discreto e contínuo. O
espectro de relaxação obtido é, por natureza, composto de um conjunto discreto de
pontos (resultado do problema de otimização – minimização do desvio quadrático). A
partir deste espectro discreto, serão apresentadas ainda duas metodologias para a
geração de um espectro contínuo.
5.1 Validação do Método
Para validar o programa utilizado foi realizado o procedimento destacado no
esquema abaixo:
Módulo de Perda, G’’(ϖ) Equação (5.3)
Módulo de Armazenamento, G’(ϖ)Equação (5.2)
Tempo de Relaxação, λk Módulo de Relaxação sob Tensão, Gk
Função-objetivo a ser Minimizada
(Equação 5.1)
72
Figura 5.1 – Validação do Método de Otimização

A Figura 5.1 mostra que para se obter os parâmetros, Gk e λk, é necessário
minimizar a função-objetivo f, que neste caso expressa o quadrado do desvio padrão de
valores de G’(ϖ) e G’’(ϖ) determinados experimentalmente.
A função-objetivo a ser minimizada é:
2
122exp
2
1 122
22
exp 1)(''11
1)´(111
⎥⎦
⎤⎢⎣
⎡
+−+⎥
⎦
⎤⎢⎣
⎡
+−= ∑∑ ∑
== =
N
k ik
ikk
i
M
i
N
k ik
ikk
k
GG
GGM
fϖλ
ϖλϖϖλ
ϖλϖ
(5.1)
Para validar a ferramenta computacional a ser utilizada no desenvolvimento deste
trabalho, dados de G’(ϖ) e G’’(ϖ) foram obtidos a partir de dados de Gk e λk obtidos
por Jensen (2002) de modo a tornar o programa robusto para determinação de espectros
de relaxação. Entenda-se por robustez, neste ponto, a capacidade de localização de
ótimos globais da função-objetivo representada pela Eq. (5.1).
Deve-se ter em conta, entretanto, que Jensen (2002) utilizou-se de 42 pontos
experimentais, para polietileno de baixa densidade, na faixa de freqüência de
0.06 1113ω≤ ≤ rad/s, que não estão disponíveis em forma tabular, mas apenas em um
gráfico de e contra a freqüência. '[G Pa] ]
] ]
''[G Pa
Assim, os parâmetros ótimos encontrados por Jensen (2002) para Gk e λk foram
utilizados para a reconstrução das funções e , através das expressões: '[G Pa ''[G Pa
∑= +
=N
k k
kkGG
122
22
1)('
ϖλϖλ
ϖ (5.2)
∑= +
=N
k k
kkGG
1221
)(''ϖλ
ϖλϖ (5.3)
com 6 (seis) modelos de Maxwell (N=6), onde foram produzidos 50 pontos
“experimentais” para a mesma faixa de freqüência citada anteriormente. Assim, o
procedimento de minimização foi efetuado não sobre os mesmos pontos experimentais
que Jensen (2002) – uma vez que estes não estão disponíveis com a acurácia necessária
73

à modelagem – mas sobre uma função reconstruída com os próprios parâmetros obtidos
por Jensen (2002).
Determinou-se, então, uma lista de resfriamento apropriada para o problema,
através de diversas tentativas. Observou-se que para temperaturas iniciais com valor
muito alto (T0 na Tabela 5.1), por exemplo, geravam um excessivo custo computacional
para a estratégia de otimização. Este parâmetro foi sendo ajustado, portanto, até um
determinado ponto no qual a função-objetivo era minimizada em um mesmo valor.
Tabela 5.1 – Melhores Valores para o controle no Algoritmo SA
(Lista de Resfriamento). Parâmetro Valor
NS 40 NT 180 T0 250 RT 0,90 EPS 1,0E-06
O procedimento de minimização produziu um valor de função-objetivo próximo
a 0,02, o que, a despeito de não se tratar de um ótimo global (que produziria zero de
função-objetivo), é bastante satisfatório. De fato, este valor de função-objetivo é
próximo ao que Jensen (2002) obteve com dados experimentais, conforme ilustra a
Figura 5.2 a seguir.
74

Figura 5.2 – Relação do Desvio Padrão com o Número de Modelos de Maxwell [retirada de Jensen (2002)].
A figura ilustra também uma outra informação relevante constatada na realização
deste trabalho. Foi observado, através de testes com diferentes números de modelos de
Maxwell, o decaimento da função objetivo (S.D2) com o aumento do número de
modelos empregado. Observou-se ainda (Tabela 5.2), que seu valor permaneceu
constante a partir de aproximadamente o mesmo número de modelos utilizados por
Jensen (2002). Assim, optou-se pela utilização de 6 modelos de Maxwell, uma vez que
a regressão obtida com mais informações apresentou valor de função-objetivo
essencialmente igual, não trazendo nenhum ganho adicional para a determinação do
espectro de relaxação.
75

Tabela 5.2 – Variação da função objetivo com o Número de Modelos de Maxwell.
Valor da Função-Objetivo (S.D.2) Número de Modelos de Maxell 0.01714264798 10 0.01714260411 9 0.01714263228 8 0.01714265871 7 0.01716458404 6 0.017543858031 5 0.024199711142 4 0.075811545775 3 0.315986788611 2 0.770034023992 1
A Figura 5.3 ilustra graficamente os resultados apresentados na Tabela 5.2.
Observa-se que o resultado da otimização (valor da função-objetivo) permanece
praticamente constante após 6 (seis) modelos de Maxwell. O tempo de computação não
foi avaliado. Consideramos que, atualmente, está em desuso apresentar tempos de
computação para problemas deste porte, uma vez que os resultados são claramente
dependentes da máquina utilizada.
Figura 5.3 – Variação da Função-objetivo em função do número de modelos
de Maxwell.
76

Os dados de módulo de relaxação e tempo de relaxação, Gk e λk respectivamente,
obtidos para 6 (seis) modelos de Maxwell estão apresentados na Tabela 5.3.
Tabela 5.3 – Parâmetros ótimos encontrados para calibração do método.
kλ Gk
0,00089872 111840,0 0,0072428 22979,0 0,13686 1580,1 0,18905 840,74 0,033981 7722,0 1,3946 177,66
A reconstrução das funções G’(ϖ) e G’(ϖ) com os parâmetros otimizados
mencionados na Tabela 5.3 anterior, pode ser comparada com o esboço inicial do
gráfico publicado por Jensen (2002), como ilustra a Figura 5.4, apresentada a seguir.
------- Jensen (2002) • Este Trabalho
Figura 5.4 – Gráfico Comparativo da medida de valores de G’ e G’’ em função da freqüência.
77

Os resultados obtidos indicam que o procedimento de estimação de parâmetros foi
conduzido satisfatoriamente, uma vez que as curvas para G’ e G’’ apresentam boa
concordância com os resultados relatados por Jensen (2002). Assim, uma ferramenta
computacional de otimização foi validada (ainda que para um único polímero)
possibilitando um estudo aprofundado do comportamento reológico de materiais
poliméricos. Claramente, o procedimento de validação da ferramenta computacional
desenvolvida deve ser novamente avaliado posteriormente, tendo em vista a
complexidade da determinação de todos os parâmetros da lista de resfriamento de um
algoritmo estocástico do tipo Simulated Annealing.
Vale ressaltar que a lista de resfriamento utilizada neste trabalho não foi a mesma
apresentada por Jensen (2002). De fato, acredita-se que o parâmetro de redução de
temperatura na ordem de 0,01 [proposto por Jensen (2002)] apresenta características de
um processo de “quenching” e não de “annealing”, como o proposto por Corana et al.
(1987).
Não foi possível analisar-se a existência ou não de diversos mínimos para este
problema (tendo em vista o grande número de parâmetros da função). A existência de
mais de um mínimo (alguns destes, mínimos locais) pode justificar a utilização de
algoritmos de otimização estocásticos como o Simulated Annealing. Por outro lado,
usar-se um algoritmo desta natureza com fator de redução tão pequeno quanto proposto
por Jensen (2002) retira as características de convergência global assintótica do
algoritmo. Portanto, para este trabalho, utilizou-se um fator de redução de temperatura
modificado, na ordem de 0,90, valor compatível com o normalmente utilizado em
otimização estocástica.
78

5.2 Aplicação da Ferramenta Computacional
Neste trabalho é apresentada uma metodologia de estimação de parâmetros através
do algoritmo estocástico de otimização Simulated Annealing para possibilitar a
obtenção do espectro de relaxação de polímeros, a partir de dados do módulo de
armazenamento G’(ϖ) e de perda G’’(ϖ) obtidos utilizando-se o equipamento
Rheometric Scientific, Modelo SR5, com deformação controlada em 5% e geometria de
placas paralelas, locado no Laboratório de Tecnologia de Polímeros do Instituto
Politécnico da Universidade do Estado do Rio de Janeiro. A temperatura de trabalho foi
realizada à 200 oC em uma faixa de freqüência de 0,1 à 100 Hz.
A ferramenta desenvolvida foi aplicada para determinação do espectro de
relaxação de um material polimérico, em particular, o polietileno linear de baixa
densidade (LLDPE). Os dados do módulo de armazenamento G’(ϖ) e de perda G’’(ϖ),
assim como o espectro de relaxação contínuo e discreto, foram obtidos através do
reômetro AR 2000 (TA Instruments), à temperatura de trabalho de 200 oC, faixa de
freqüência 0,01 - 628,3 rad/s e tensão de oscilação aplicada a 300 Pa. A análise foi
realizada no Laboratório de Tecnologia Petroquímica do Centro de Pesquisas da
Petrobrás – CENPES. O reômetro apresenta um software (desenvolvido pela própria TA
Instruments) capaz de gerar o espectro de relaxação discreto e contínuo do polímero em
questão.
Os dados de G’(ϖ) e G’’(ϖ) obtidos no reômetro AR 2000 foram inseridos no
programa desenvolvido neste trabalho, e não os valores gerados pelo equipamento
Rheometric Scientific, uma vez que deseja-se comparar os resultados obtidos por esta
pesquisa com aqueles automaticamente produzidos pelo software built-in do AR 2000.
79

O procedimento de otimização com vistas à geração do espectro de relaxação
discreto foi reslizado utilizando-se os resultados apresentados na Tabela 5.4.
Tabela 5.4 – Dados do LLDPE gerados pelo AR 2000. Freqüência ϖ
(rad/s) Módulo de Armazenamento G’
(Pa) Módulo de Perda G’’
(Pa) 0,01 3,325 103,4
0,01585 14,93 169,6 0,02512 29,78 266,1 0,03981 51,78 412,2 0,0631 87,76 633,5
0,1 147,7 967,6 0,1585 245,7 1468 0,2512 407,1 2215 0,3982 674,3 3327 0,631 1121 4957
1 1866 7333 1,586 3102 10720 2,512 5132 15450 3,98 8350 21850 6,309 13460 30590
10 21150 41770 15,84 32070 55190 25,12 47170 71050 39,81 67590 89340 63,09 94850 1,12 x105
100 1,29x105 1,32 x105
158,5 1,71 x105 1,54 x105
251,2 2,19 x105 1,76 x105
398,1 2,80 x105 2,01 x105
628,3 3,51 x105 2,27 x105
A partir das observações efetuadas na etapa de validação, o programa foi
ajustado para determinação de 6 (seis) Modelos de Maxwell. Logo, seis pares de pontos
ordenados foram gerados, correspondentes aos valores de Gk e λk respectivamente,
formando o espectro de relaxação discreto. Estes valores encontram-se listados na
Tabela 5.5.
80

Tabela 5.5 – Parâmetros ótimos encontrados para o LLDPE
λk Gk
0,0010986 411.450 0,0070508 144.690 0,029618 59.826 0,12765 19.382 0,74164 3.308,4 10,00 315,68
O equipamento AR 2000 também possibilita a obtenção do espectro discreto a
partir do conjunto de dados listados na Tabela 5.4. A metodologia utilizada para
obtenção destes pontos, infelizmente, não estava disponível no manual do equipamento.
A comparação do espectro discreto gerado neste trabalho com o obtido pelo
equipamento AR 2000 está ilustrada na Figura 5.5. Observa-se uma excelente
concordância entre os dados produzidos pelo equipamento AR 2000 e os obtidos neste
trabalho. Ainda que os pontos obtidos não sejam exatamente iguais, visualmente nota-se
que estão sobre a mesma curva e, por conseguinte, devem produzir espectros contínuos
semelhantes. De fato, não espera-se que o procedimento de otimização produza
exatamente os mesmos valores fornecidos pelo AR 2000; apenas que os conjuntos de
pontos encontrem-se sobre curvas semelhantes.
81

Figura 5.5 – Espectro de Relaxação Discreto do LLDPE obtido pelo equipamento AR 2000 (versão espectro discreto) e pela metodologia empregada neste
trabalho.
Posteriormente, comparou-se o espectro discreto gerado neste trabalho com o
espectro contínuo gerado no equipamento AR 2000, conforme ilustra a Figura 5.6 a
seguir. Obviamente, não foi possível ter acesso ao código computacional para a geração
do espectro desenvolvido pela TA Instruments; contudo, algumas informações foram
obtidas através de contatos com representantes da empresa no Brasil. O procedimento
para geração do espectro discreto é similar ao desenvolvido neste trabalho (difere
possivelmente no que diz respeito à metodologia numérica para a minimização do
resíduo). Por outro lado, obteve-se poucas informações sobre como foi gerado o
espectro contínuo. Uma informação disponibilizada foi a de que a faixa de freqüências
82

utilizada para a geração do espectro contínuo é maior do que aquela empregada na
obtenção do espectro discreto (Rosas, 2006).
Figura 5.6 – Espectro de Relaxação do LLDPE (contínuo e discreto).
Observa-se na Figura 5.6 que para tempos de relaxação superior a 5x10-3 os
resultados apresentam-se bastante satisfatórios. Por outro lado, para baixos valores de
tempo de relaxação o modelo proposto não concorda com o obtido pelo software
comercial.
Entretanto, para uma melhor comparação entre os resultados obtidos, faz-se
necessário a aplicação de uma interpolação entre os pontos obtidos no espectro de
relaxação discreto ou uma regressão de dados para geração de um espectro contínuo.
83

5.3 Obtenção do Espectro Contínuo a partir do Espectro Discreto
As informações contidas no espectro de relaxação discreto são as mesmas do
espectro contínuo, conforme Baumgartel e Winter (1989). Entretanto, em algumas
situações é útil dispor-se de uma função que represente o espectro de relaxação, ao
invés de um conjunto de pares ordenados. Assim, são propostas duas metodologias para
a obtenção do espectro contínuo: uma interpolação polinomial (via interpolação
lagrangeana) e uma regressão de dados.
5.3.1. Interpolação Lagrangeana
Com vista à obtenção do espectro contínuo foi determinado um polinômio de 5º
grau, através da interpolação lagrangeana, utilizando os resultados obtidos na Tabela
5.4. Observou-se um bom ajuste do polinômio nos pontos não-tabelados (obviamente, o
polinômio atende sempre aos pontos tabelados – uma característica de qualquer
interpolante).
A Figura 5.7, apresentada a seguir, apresenta o espectro discreto e o
correspondente contínuo obtido via interpolação lagrangeana.
84

Figura 5.7 – Espectro de Relaxação Contínuo do LLDPE, obtido por interpolação lagrangeana.
A comparação com os resultados obtidos pelo reômetro AR 2000 (TA
Instruments) é ilustrada na Figura 5.8. Observa-se uma boa concordância de resultados
para valores de tempos de relaxação a partir de 10-1. Conforme já ressaltado
anteriormente, o espectro contínuo gerado pelo AR 2000 não utiliza as mesmas
freqüências do espectro discreto. Assim, não deve-se esperar total concordância entre os
resultados.
85

Figura 5.8 – Comparação dos Espectros de Relaxação Contínuos entre a metodologia deste trabalho e software comercial da TA Instruments.
5.3.2. Regressão Não-Linear / Estimação de Parâmetros
Alternativamente, em relação ao procedimento de interpolação polinomial,
pode-se ajustar os dados experimentais a um certo modelo não-linear, de modo a obter-
se uma aproximação do espectro contínuo. A regressão apresenta, contudo, uma
desvantagem: enquanto o polinômio interpolador reproduz, com certeza, os pontos
tabelados, o mesmo não é garantido para o modelo gerado via regressão não-linear.
Entretanto, podem-se obter curvas mais realísticas para a representação do espectro
contínuo.
86

A obtenção dos parâmetros de um modelo não-linear passa, obrigatoriamente,
por outro procedimento de minimização de resíduos (usualmente conhecido como
estimação de parâmetros ou regressão – neste caso – não-linear). Novamente, podem ser
considerados algoritmos determinísticos ou estocásticos neste procedimento de
otimização.
A primeira etapa do procedimento de estimação de parâmetros é uma proposta
de modelo não-linear. Neste caso, será considerado o seguinte modelo:
q 21y xζζ= (5.1)
A proposta de um modelo do tipo potência foi feita mediante uma análise do
gráfico da Figura 5.4. A expressão (5.1) pode ser facilmente linearizada, bastando
aplicar-se logaritmos em ambos os lados da equação, de modo que:
1 2log( ) log( ) log( )y xζ ζ= + (5.2)
Deste modo, pode-se medir a qualidade do ajuste via coeficiente de correlação,
como usualmente é feito em procedimentos do tipo mínimos quadrados.
Do ponto de vista computacional, foi considerado o modelo não-linear dado pela
equação (5.1), sendo minimizada a seguinte função:
( )22
11
1( )2
{ }
nm
k kk
Min F Gζζ ζ λ
ζ=
= −∑ % (5.3)
onde nm refere-se ao número de modelos de Maxwell.
Numericamente, o problema de otimização foi resolvido utilizando-se dois
algoritmos distintos: (i) um método do tipo Quasi-Newton com matriz Hessiana
atualizada pelo método BFGS (Broyden,1970; Fletcher, 1970; Goldfarb, 1970; Shanno,
1970); (ii) o algoritmo estocástico proposto por Luus & Jaakola (1973) (tendo em vista
87

a aplicabilidade deste tipo de algoritmo em problemas de tamanhos pequenos e médios).
Os resultados obtidos foram idênticos, para valores de 1ζ = 3457,73 e 2ζ = - 0,6805.
A Figura 5.8 a seguir ilustra o espectro contínuo obtido para um ajuste com 7
modelos de Maxwell.
Figura 5.8 – Ajuste do Espectro Contínuo com 7 Modelos de Maxwell.
Observa-se que o ponto em baixo tempo de relaxação introduz, aparentemente,
um erro no ajuste do espectro contínuo. Ao retirar-se este primeiro ponto, a seguinte
Figura 5.9 é obtida.
88

Figura 5.9 – Ajuste do Espectro Contínuo com 6 Modelos de Maxwell
Nota-se que, embora o resultado em baixas freqüências tenha melhorado, a partir
do valor 10-2 o ajuste sofreu uma piora em relação ao ajuste com 7 modelos de
Maxwell.
Na verdade, ao traçar-se o gráfico com ambos os eixos em escala logarítmica,
obtem-se a Figura 5.10 (com 7 modelos de Maxwell) e a Figura 5.11 (com 6 modelos de
Maxwell). Visualmente, o ajuste com 7 modelos de Maxwell produz melhores
resultados.
89

Figura 5.10 – Ajuste do Espectro Contínuo com 7 Modelos de Maxwell
[escala logarítmica].
90
Figura 5.11 – Ajuste do Espectro Contínuo com 6 Modelos de Maxwell [escala logarítmica].

CAPÍTULO 6
CONCLUSÕES E SUGESTÕES PARA TRABALHOS FUTUROS
6.1. Conclusões
Neste trabalho foram desenvolvidas ferramentas numéricas para a determinação
de espectros de relaxação de polímeros. Tais ferramentas poderão ser utilizadas para, a
partir de dados de módulo de armazenamento e de módulos de perda (disponibilizados,
por exemplo, pelo Rheometric Scientific, Modelo SR5, locado no Laboratório de
Tecnologia de Polímeros do Instituto Politécnico) gerar um conjunto discreto de pontos
de tempos de relaxação e módulos de relaxação sob tensão, formando um espectro
discreto. Além disto, foram propostas e implementadas duas metodologias para a
geração de um espectro contínuo a partir de um conjunto discreto de pontos: uma
interpolação e um ajuste de curva não-linear.
Em relação aos algoritmos de otimização empregados para a geração do espectro
discreto, pode-se concluir que:
(i) o algoritmo Simulated Annealing foi capaz de determinar, após um ajuste da
lista de resfriamento, os valores de tempos de relaxação e módulos de
relaxação sob tensão com a acurácia necessária;
(ii) a lista de resfriamento apresentada por Jensen (2002) promove um
quenching (resfriamento rápido) e não um annealing (resfriamento lento) e
pode induzir o algoritmo a localizar ótimos locais ao invés do mínimo global
da função;
90

(iii) o algoritmo de busca aleatória de Luus e Jaakola (1973) não foi capaz de
resolver, a contento, o problema de minimização com vistas à obtenção do
espectro de relaxação. Tal fato deve ser explicado pelo número de variáveis
do problema (12 variáveis, se considerarmos o número de modelos de
Maxwell igual a 6);
(iv) o espectro de relaxação obtido nesta pesquisa foi similar ao apresentado pelo
equipamento AR 2000, a menos de um desvio verificado para baixos valores
de tempos de relaxação;
(v) as técnicas de interpolação polinomial e de regressão não-linear foram
capazes de gerar um espectro contínuo com boa aderência em relação aos
dados do espectro discreto.
6.2. Sugestões para Trabalhos Futuros
Como sugestões para trabalhos futuros, pode-se elencar:
(i) utilização de outros algoritmos de otimização (estocásticos e
determinísticos) para a minimização dos resíduos. Por exemplo, os
algoritmos genéticos e algoritmos do tipo PSO (particle swarm
optimization);
(i) efetuar análises em faixas de freqüência maiores;
(ii) abordar a obtenção do espectro contínuo a partir do espectro discreto com
outras metodologias;
(iii) aplicar a metodologia para outros materiais poliméricos;
(iv) utilizar o espectro de relaxação para o cálculo das médias de peso molecular
de polímeros.
91

REFERÊNCIAS BIBLIOGRÁFICAS
1. AHÓN, V. R.; TAVARES, F. W.; CASTIER, M. A comparison of simulated
annealing algorithms in the scheduling of multiproduct serial batch plants. Brazilian
Journal of Chemical Engineering, v. 17, n. 2, p. 199-209, 2000.
2. BAUMGAERTEL, M.; WINTER, H. H. Determination of discrete relaxation and
retardation time spectra from dynamic mechanical data. Rheologica Acta, v. 28, p.
511-519, 1989.
3. BRETAS, R. E. S.; D' AVILA, M.A. Reologia de polímeros fundidos. São Carlos,
SP: UFSCAR, 2000.
4. BROYDEN, C.G., "The Convergence of a Class of Double-Rank
Minimization Algorithms, "Journal Inst. Math. Applic., Vol. 6, pp. 76-90, 1970.
5. CALLISTER, W. D. Ciência e engenharia de materiais: uma introdução. 5.ed. Rio
de Janeiro: LTC, c2002.
6. CARDOSO, M. F.; SALCEDO, S.; AZEVEDO, S. F.; BARBOSA, D. A simulated
annealing approach to the solution of MINLP problems. Computers & Chemical
Engineering, v. 21, n.12, p. 1349-1364, sept. 1997.
7. CORANA, A.; MARCHESI, M.; MARTINI, C.; RIDELLA, S. Minimizing
multimodal functions of continuous variables with the simulated annealing
algorithm. ACM Transactions on Mathematical Software, v. 13, n.3, p. 262-280,
1987.
8. FERRY, J. D. Viscoelastic properties of polymers. 3rd ed. New York: J. Wiley,
c1980. 641p.
92

9. FLETCHER, R.,"A New Approach to Variable Metric Algorithms," Computer
Journal, Vol. 13, pp. 317-322, 1970.
10. GOLDFARB, D., "A Family of Variable Metric Updates Derived by
Variational Means", Mathematics of Computing, Vol. 24, pp. 23-26, 1970.
11. GOMES, J. L. M. A. Modelagem computacional do equilíbrio líquido-vapor de
soluções poliméricas usando uma equação de estado cúbica. 1999. 97f. Dissertação
(Mestrado em Modelagem Computacional)- Instituto Politécnico, Universidade do
Estado do Rio de Janeiro, Nova Friburgo, RJ, 1999.
12. HONERKAMP, J. Ill-posed problem in rheology. Rheologica Acta, v. 28, p. 363-
371, 1989.
13. JENSEN, E. A., Determination of discrete relaxation spectra using simulated
annealing. Journal of Non-Newtonian Fluid Mechanics, v. 107, p. 1-11, 2002.
14. KREYSZIG, E. Advanced engineering mathematics. 7.ed. New York : J.
Wiley,1993.
15. ORBEY, N. Determination of the relaxation spectrum from oscillatory shear data. J.
Rheol, v. l 35, p. 1035-1049, 1991.
16. ROSAS, Abel Gaspar: Depoimento [julho, 2006]. Entrevistador: Gabriel Caetano da
Silva. Entrevista oral.
17. SANTOS, S. F. Análise de filmes poliméricos densos de ACC/PHAMCL por
técnicas de DSC, DMA, XPS, ângulo de contato e AFM. 2005. 70f. Dissertação
(Mestrado) – Departamento de Física, Pontifícia Universidade Católica do Rio de
Janeiro, 2006.
93

18. SILVA, L. F. Predição de pontos críticos de misturas termodinâmicas: uma nova
metodologia usando otimização global. 2005. 109f. Tese (Doutorado em
Modelagem Computacional) – Instituto Politécnico, Universidade do Estado do Rio
de Janeiro, 2005.
19. SHANNO, D.F., "Conditioning of Quasi-Newton Methods for Function
Minimization", Mathematics of Computing, Vol. 24, pp. 647-656, 1970.
20. WARD, I. M. Mechanical properties of solid polymers. 2nd ed. New York: J.
Wiley, 1985.
21. WINTER, H. H. Analysis of dynamic mechanical data: inversion into a relaxation
time spectrum and consistency check. Journal of Non-Newtonian Fluid Mechanics,
v. 68, p. 225-239, 1997.
94

ANEXO
Aplicação do Método de Lagrange para Resolução da Equação Diferencial
Ordinária – EDO – apresentada no Modelo de Voight, Capítulo 2.
A EDO do modelo de Voight pode ser escrita da seguinte forma:.
0=−+ σγηγdtdG vv (A1)
Dividindo a Eq. (A1) pela viscosidade ηv
vv
vGdtd
ησγ
ηγ
=⎟⎟⎠
⎞⎜⎜⎝
⎛+ (A2)
Para facilitar a aplicação de Lagrange, fazem-se as seguintes considerações:
γ = y t = x v
vGη
= P(x) vησ = Q(x) (A3)
Para assim poder aplicar na fórmula de Lagrange abaixo.
∫ +∫=∫ CdxxQydxxPdxxP )()(
exp)(exp (A4)
Portanto:
∫ += Cdxv
yxGxG
v
v
v
v
ηη
ησ expexp (A5)
95

Resolvendo a integral:
CG
yxG
v
v
v
xG
v
v
v
v
+= ηη ηησ expexp (A6)
Cancelando a viscosidade ηv e aplicando a Eq. (A6) na condição inicial do
experimento – deformação (γ = y) e tempo (t = x) iguais a zero – é possível calcular o
valor da constante C.
CGv
+=σ0 Portanto,
vGC σ
−= (A7)
Substituindo o valor da constante C na Eq. (A6),
v
xG
v
xG
GGy v
v
v
v σσ ηη −= expexp (A8)
Isolando y e colocando o termo vG
σ em evidência, obtém-se:
⎟⎟
⎠
⎞⎜⎜
⎝
⎛−=
− xG
v
v
v
Gy ησ exp1 (A9)
Retomando os valores atribuídos na Eq. (A3), obtém-se a relação entre a
deformação e o tempo.
⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎟⎠
⎞⎜⎜⎝
⎛−−= t
GG v
v
v ησγ exp1 (A10)
De fato, a resposta do modelo de Voight, quando submetido a tensão constante,
é mais facilmente compreendida quando se considera a resposta de recuperação, onde a
tensão σ é igual a zero.
96

Pela equação A1:
0=+dtdG vvγηγ (A11)
Através de algebrismo análogo àquele realizado para o modelo de Maxwell
(ensaio de relaxação sob tensão), porém definindo para o caso de ensaio de compliância
em creep, e o tempo de retardação v
v
Gη
λ =' , obtém-se:
dtdG vvγηγ −=
dtGd v
v 1ηγγ
−=
dtd'λ
γγ
−= ∫∫ −='λγ
γ dtd
Resolvendo-se a integral indefinida acima, obtém-se:
'
lnlnλ
γ tC −=+
'
lnλ
γ tC −=
⎟⎠⎞
⎜⎝⎛−=
'exp
λγ tC
⎟⎠⎞
⎜⎝⎛−=
'exp1
λγ t
C
Como o inverso de uma constante C é uma outra constante K,
⎟⎠⎞
⎜⎝⎛−=
'exp
λγ tK (A12)
97

Aplicando-se a condição inicial do problema na expressão acima, é possível
verificar que o valor da constante K é igual a deformação inicial 0γ , ou seja:
Quando o tempo t = 0 a deformação total γ é igual a deformação inicial 0γ . Portanto:
⎟⎠⎞
⎜⎝⎛−=
'0exp0 λ
γ K
K = 0γ (A13)
Substituindo o valor da constante K na Eq. (A12), obtém-se a expressão que
melhor representa o Modelo de Voight:
'exp0 λ
γγ t−= (A14)
98

Livros Grátis( http://www.livrosgratis.com.br )
Milhares de Livros para Download: Baixar livros de AdministraçãoBaixar livros de AgronomiaBaixar livros de ArquiteturaBaixar livros de ArtesBaixar livros de AstronomiaBaixar livros de Biologia GeralBaixar livros de Ciência da ComputaçãoBaixar livros de Ciência da InformaçãoBaixar livros de Ciência PolíticaBaixar livros de Ciências da SaúdeBaixar livros de ComunicaçãoBaixar livros do Conselho Nacional de Educação - CNEBaixar livros de Defesa civilBaixar livros de DireitoBaixar livros de Direitos humanosBaixar livros de EconomiaBaixar livros de Economia DomésticaBaixar livros de EducaçãoBaixar livros de Educação - TrânsitoBaixar livros de Educação FísicaBaixar livros de Engenharia AeroespacialBaixar livros de FarmáciaBaixar livros de FilosofiaBaixar livros de FísicaBaixar livros de GeociênciasBaixar livros de GeografiaBaixar livros de HistóriaBaixar livros de Línguas

Baixar livros de LiteraturaBaixar livros de Literatura de CordelBaixar livros de Literatura InfantilBaixar livros de MatemáticaBaixar livros de MedicinaBaixar livros de Medicina VeterináriaBaixar livros de Meio AmbienteBaixar livros de MeteorologiaBaixar Monografias e TCCBaixar livros MultidisciplinarBaixar livros de MúsicaBaixar livros de PsicologiaBaixar livros de QuímicaBaixar livros de Saúde ColetivaBaixar livros de Serviço SocialBaixar livros de SociologiaBaixar livros de TeologiaBaixar livros de TrabalhoBaixar livros de Turismo