fundamentos de robótica - eudim.uta.cl · 2 aplicación de matrices homogéneas traslación...
TRANSCRIPT

Fundamentos de RobóticaHerramientas Matemáticas para la Localización Espacial
Matrices de Transformación Homogéneas
Ricardo-Franco [email protected]
Escuela Universitaria de Ingeniería MecánicaUniversidad de Tarapacá
Arica, Chile
May 12, 2014
R. F. Mendoza-Garcia (Mecánica, UTA) Matrices de Transformación Homogéneas May 12, 2014 1 / 26
Outline
Outline
1 Coordenadas y matrices homogéneasCoordenadas homogéneasMatriz de transformación homogénea
2 Aplicación de matrices homogéneasTraslaciónRotaciónTraslación junto con rotaciónRotación seguida de traslaciónTraslación seguida de rotación
3 Composición de matrices homogéneasRotaciones sobre sistema fijoRotaciones sobre sistema móvil
4 Gráficos de transformación
5 Referencias
R. F. Mendoza-Garcia (Mecánica, UTA) Matrices de Transformación Homogéneas May 12, 2014 2 / 26
Coordenadas y matrices homogéneas
Outline
1 Coordenadas y matrices homogéneasCoordenadas homogéneasMatriz de transformación homogénea
2 Aplicación de matrices homogéneasTraslaciónRotaciónTraslación junto con rotaciónRotación seguida de traslaciónTraslación seguida de rotación
3 Composición de matrices homogéneasRotaciones sobre sistema fijoRotaciones sobre sistema móvil
4 Gráficos de transformación
5 Referencias
R. F. Mendoza-Garcia (Mecánica, UTA) Matrices de Transformación Homogéneas May 12, 2014 3 / 26

Coordenadas y matrices homogéneas Coordenadas homogéneas
Coordenadas homogéneasPermiten la representación conjunta de traslación y rotación.Un vector p(x , y , z) será representado por p(wx ,wy ,wz,w).w es un valor arbitrario; factor escala.
Así, el vector 2i + 3j + 4k puede ser representado en coordenadashomogéneas como: [2,3,4,1]T , o también como [4,6,8,2]T ,[−6,−9,−12,−3]T , etc.
R. F. Mendoza-Garcia (Mecánica, UTA) Matrices de Transformación Homogéneas May 12, 2014 4 / 26
Coordenadas y matrices homogéneas Matriz de transformación homogénea
Matriz de transformación homogéneaMatriz de dimensión 4x4 que representa la transformación de unvector de coordenadas homogéneas de un sistema decoordenadas a otro.Se puede considerar que una matriz homogénea se hayacompuesta por 4 sub-matrices:
I R3x3, matriz de rotación;I p3x1, vector de traslación;I f1x3, transformación de perspectiva; yI w1x1, escalado global.
R. F. Mendoza-Garcia (Mecánica, UTA) Matrices de Transformación Homogéneas May 12, 2014 5 / 26
Coordenadas y matrices homogéneas Matriz de transformación homogénea
Matriz de transformación homogéneaMatriz de dimensión 4x4 que representa la transformación de unvector de coordenadas homogéneas de un sistema decoordenadas a otro.Se puede considerar que una matriz homogénea se hayacompuesta por 4 sub-matrices:
I R3x3, matriz de rotación;I p3x1, vector de traslación;I f1x3, transformación de perspectiva; yI w1x1, escalado global.
R. F. Mendoza-Garcia (Mecánica, UTA) Matrices de Transformación Homogéneas May 12, 2014 5 / 26
Aplicación de matrices homogéneas
Outline
1 Coordenadas y matrices homogéneasCoordenadas homogéneasMatriz de transformación homogénea
2 Aplicación de matrices homogéneasTraslaciónRotaciónTraslación junto con rotaciónRotación seguida de traslaciónTraslación seguida de rotación
3 Composición de matrices homogéneasRotaciones sobre sistema fijoRotaciones sobre sistema móvil
4 Gráficos de transformación
5 Referencias
R. F. Mendoza-Garcia (Mecánica, UTA) Matrices de Transformación Homogéneas May 12, 2014 6 / 26

Aplicación de matrices homogéneas
Aplicación de matrices homogéneaConsiderando la transformación de perspectiva nula y el escaladoglobal unitario:
Así, una matriz de transformación puede representar:I posición y orientación de un sistema O′UVW girado y trasladado
con respecto a OXYZ ;
R. F. Mendoza-Garcia (Mecánica, UTA) Matrices de Transformación Homogéneas May 12, 2014 7 / 26
Aplicación de matrices homogéneas
Aplicación de matrices homogéneaConsiderando la transformación de perspectiva nula y el escaladoglobal unitario:
Así, una matriz de transformación puede representar:I transformación de las coordenadas de un vector r desde sus
coordenadas en O′UVW a sus coordenadas en OXYZ ; o
R. F. Mendoza-Garcia (Mecánica, UTA) Matrices de Transformación Homogéneas May 12, 2014 7 / 26
Aplicación de matrices homogéneas
Aplicación de matrices homogéneaConsiderando la transformación de perspectiva nula y el escaladoglobal unitario:
Así, una matriz de transformación puede representar:I rotación (R) y traslación (p) de un vector r con respecto a un
sistema de referencia fijo OXYZ para transformarlo en r ′.
R. F. Mendoza-Garcia (Mecánica, UTA) Matrices de Transformación Homogéneas May 12, 2014 7 / 26
Aplicación de matrices homogéneas
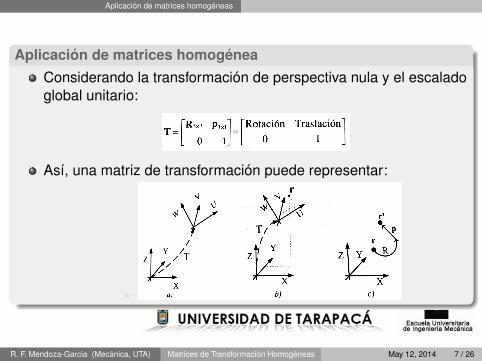
Aplicación de matrices homogéneaConsiderando la transformación de perspectiva nula y el escaladoglobal unitario:
Así, una matriz de transformación puede representar:
I
R. F. Mendoza-Garcia (Mecánica, UTA) Matrices de Transformación Homogéneas May 12, 2014 7 / 26
Aplicación de matrices homogéneas Traslación
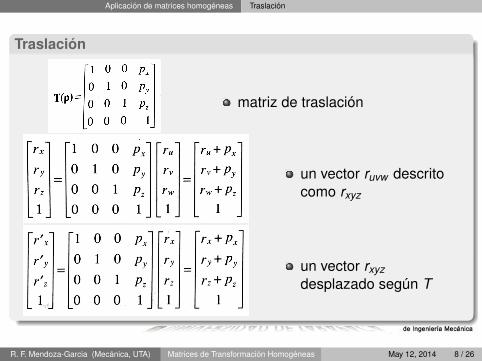
Traslación
matriz de traslación
un vector ruvw descritocomo rxyz
un vector rxyzdesplazado según T
R. F. Mendoza-Garcia (Mecánica, UTA) Matrices de Transformación Homogéneas May 12, 2014 8 / 26
Aplicación de matrices homogéneas Traslación
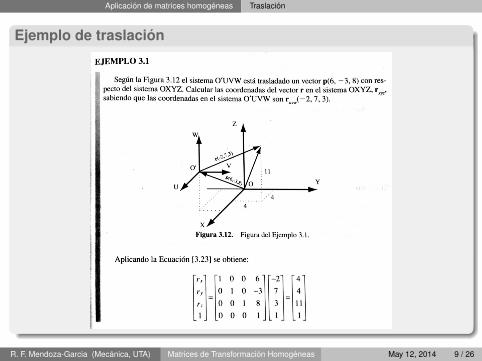
Ejemplo de traslación
R. F. Mendoza-Garcia (Mecánica, UTA) Matrices de Transformación Homogéneas May 12, 2014 9 / 26
Aplicación de matrices homogéneas Rotación
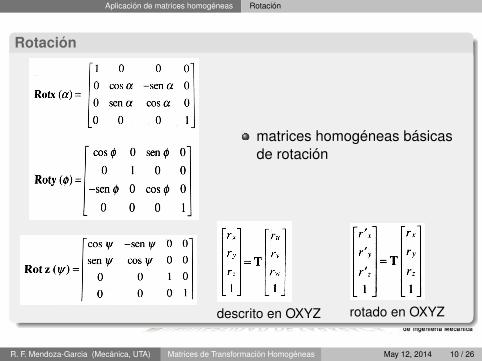
Rotación
matrices homogéneas básicasde rotación
descrito en OXYZ rotado en OXYZ
R. F. Mendoza-Garcia (Mecánica, UTA) Matrices de Transformación Homogéneas May 12, 2014 10 / 26
Aplicación de matrices homogéneas Rotación
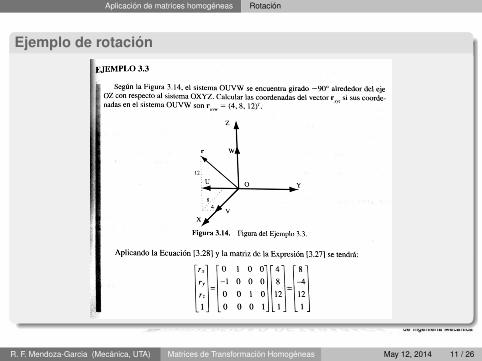
Ejemplo de rotación
R. F. Mendoza-Garcia (Mecánica, UTA) Matrices de Transformación Homogéneas May 12, 2014 11 / 26
Aplicación de matrices homogéneas Traslación junto con rotación
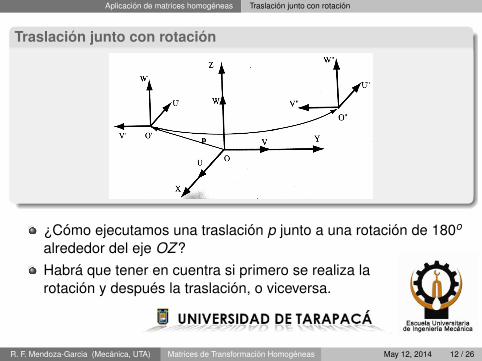
Traslación junto con rotación
¿Cómo ejecutamos una traslación p junto a una rotación de 180o
alrededor del eje OZ?Habrá que tener en cuentra si primero se realiza larotación y después la traslación, o viceversa.
R. F. Mendoza-Garcia (Mecánica, UTA) Matrices de Transformación Homogéneas May 12, 2014 12 / 26
Aplicación de matrices homogéneas Rotación seguida de traslación
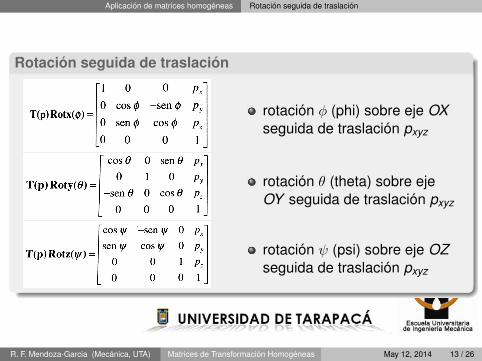
Rotación seguida de traslación
rotación φ (phi) sobre eje OXseguida de traslación pxyz
rotación θ (theta) sobre ejeOY seguida de traslación pxyz
rotación ψ (psi) sobre eje OZseguida de traslación pxyz
R. F. Mendoza-Garcia (Mecánica, UTA) Matrices de Transformación Homogéneas May 12, 2014 13 / 26
Aplicación de matrices homogéneas Traslación seguida de rotación
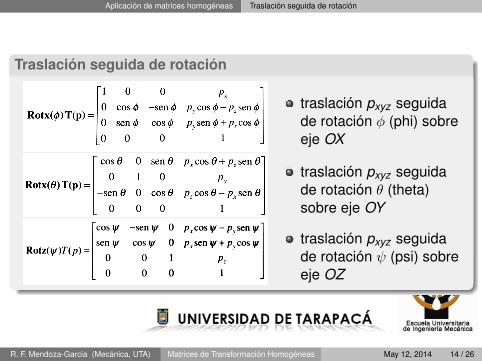
Traslación seguida de rotación
traslación pxyz seguidade rotación φ (phi) sobreeje OX
traslación pxyz seguidade rotación θ (theta)sobre eje OY
traslación pxyz seguidade rotación ψ (psi) sobreeje OZ
R. F. Mendoza-Garcia (Mecánica, UTA) Matrices de Transformación Homogéneas May 12, 2014 14 / 26
Aplicación de matrices homogéneas Traslación seguida de rotación
IMPORTANTENótese que las transformaciones se definen con respecto alsistema fijo. De definirse con respecto al sistema móvil sedeberían intercambiar los resultados!Las matrices que representan “traslación seguida de rotación”representarían “rotación seguida de traslación”, y viceversa.
R. F. Mendoza-Garcia (Mecánica, UTA) Matrices de Transformación Homogéneas May 12, 2014 15 / 26
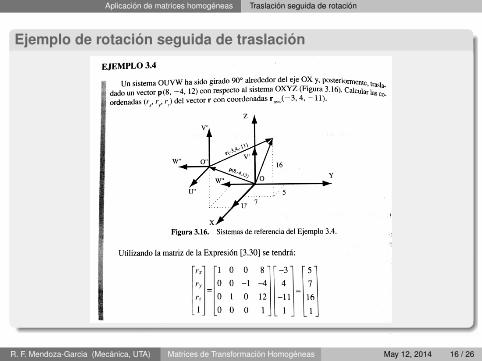
Aplicación de matrices homogéneas Traslación seguida de rotación
Ejemplo de rotación seguida de traslación
R. F. Mendoza-Garcia (Mecánica, UTA) Matrices de Transformación Homogéneas May 12, 2014 16 / 26
Composición de matrices homogéneas
Outline
1 Coordenadas y matrices homogéneasCoordenadas homogéneasMatriz de transformación homogénea
2 Aplicación de matrices homogéneasTraslaciónRotaciónTraslación junto con rotaciónRotación seguida de traslaciónTraslación seguida de rotación
3 Composición de matrices homogéneasRotaciones sobre sistema fijoRotaciones sobre sistema móvil
4 Gráficos de transformación
5 Referencias
R. F. Mendoza-Garcia (Mecánica, UTA) Matrices de Transformación Homogéneas May 12, 2014 17 / 26
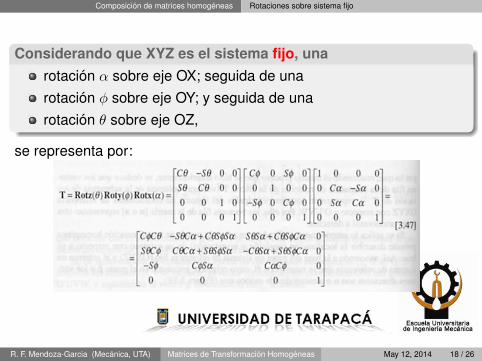
Composición de matrices homogéneas Rotaciones sobre sistema fijo
Considerando que XYZ es el sistema fijo, unarotación α sobre eje OX; seguida de unarotación φ sobre eje OY; y seguida de unarotación θ sobre eje OZ,
se representa por:
R. F. Mendoza-Garcia (Mecánica, UTA) Matrices de Transformación Homogéneas May 12, 2014 18 / 26
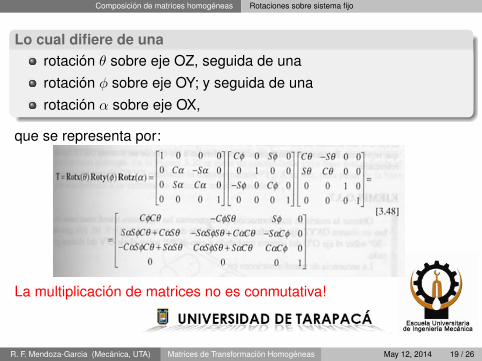
Composición de matrices homogéneas Rotaciones sobre sistema fijo
Lo cual difiere de unarotación θ sobre eje OZ, seguida de unarotación φ sobre eje OY; y seguida de unarotación α sobre eje OX,
que se representa por:
La multiplicación de matrices no es conmutativa!
R. F. Mendoza-Garcia (Mecánica, UTA) Matrices de Transformación Homogéneas May 12, 2014 19 / 26
Composición de matrices homogéneas Rotaciones sobre sistema fijo
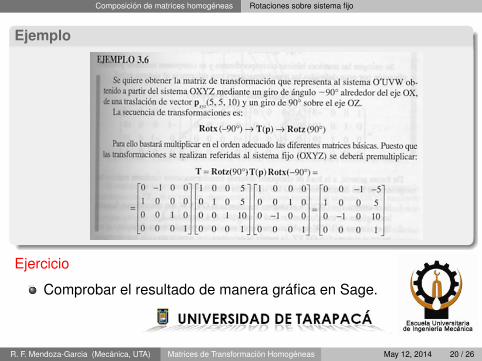
Ejemplo
Ejercicio
Comprobar el resultado de manera gráfica en Sage.
R. F. Mendoza-Garcia (Mecánica, UTA) Matrices de Transformación Homogéneas May 12, 2014 20 / 26
Composición de matrices homogéneas Rotaciones sobre sistema móvil
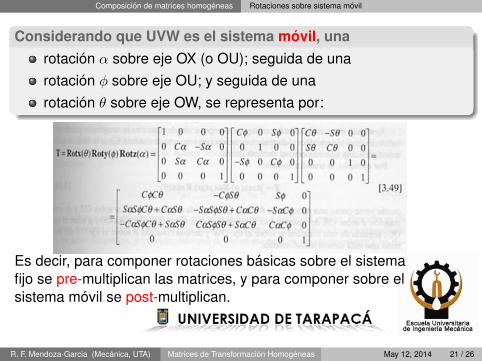
Considerando que UVW es el sistema móvil, unarotación α sobre eje OX (o OU); seguida de unarotación φ sobre eje OU; y seguida de unarotación θ sobre eje OW, se representa por:
Es decir, para componer rotaciones básicas sobre el sistemafijo se pre-multiplican las matrices, y para componer sobre elsistema móvil se post-multiplican.
R. F. Mendoza-Garcia (Mecánica, UTA) Matrices de Transformación Homogéneas May 12, 2014 21 / 26
Composición de matrices homogéneas Rotaciones sobre sistema móvil
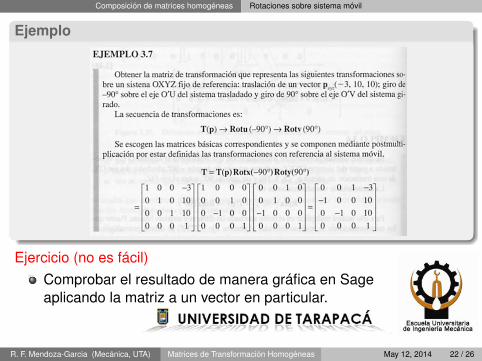
Ejemplo
Ejercicio (no es fácil)Comprobar el resultado de manera gráfica en Sageaplicando la matriz a un vector en particular.
R. F. Mendoza-Garcia (Mecánica, UTA) Matrices de Transformación Homogéneas May 12, 2014 22 / 26
Gráficos de transformación
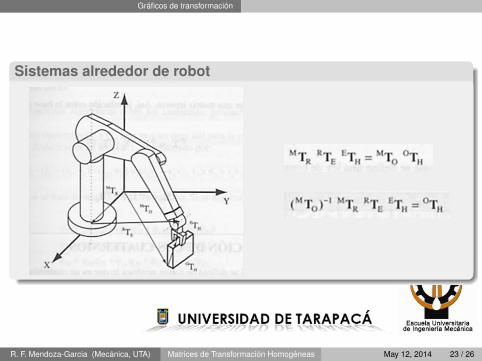
Sistemas alrededor de robot
R. F. Mendoza-Garcia (Mecánica, UTA) Matrices de Transformación Homogéneas May 12, 2014 23 / 26
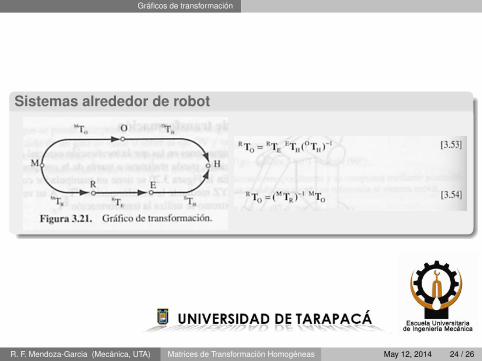
Gráficos de transformación
Sistemas alrededor de robot
R. F. Mendoza-Garcia (Mecánica, UTA) Matrices de Transformación Homogéneas May 12, 2014 24 / 26
Referencias
Outline
1 Coordenadas y matrices homogéneasCoordenadas homogéneasMatriz de transformación homogénea
2 Aplicación de matrices homogéneasTraslaciónRotaciónTraslación junto con rotaciónRotación seguida de traslaciónTraslación seguida de rotación
3 Composición de matrices homogéneasRotaciones sobre sistema fijoRotaciones sobre sistema móvil
4 Gráficos de transformación
5 Referencias
R. F. Mendoza-Garcia (Mecánica, UTA) Matrices de Transformación Homogéneas May 12, 2014 25 / 26
Referencias
BibliografíaBarrientos, A., Peñín, L.F., Balaguer, C., y Aracil, R., 2007,Fundamentos de Robótica, 2nd edition, McGraw-Hill.
R. F. Mendoza-Garcia (Mecánica, UTA) Matrices de Transformación Homogéneas May 12, 2014 26 / 26