filtragem de sinais de radiointerferencia^ nos...
TRANSCRIPT

INPE-14467-TDI/1148
FILTRAGEM DE SINAIS DE RADIOINTERFERENCIA
NOS ESPECTROS DE EXPLOSOES SOLARES
ATRAVES DE REDE NEURAL ADALINE
Kleber de Mattos Dobrowolski
Dissertacao de Mestrado do Curso de Pos-Graduacao em Computacao Aplicada,
orientada pelos Drs. Jose Demisio Simoes da Silva, e Jose Roberto Cecatto,
aprovada em 31 de marco de 2004
Registro do documento original:
<http://urlib.net/sid.inpe.br/jeferson/2004/06.08.08.13>
INPE
Sao Jose dos Campos
2009

PUBLICADO POR:
Instituto Nacional de Pesquisas Espaciais - INPE
Gabinete do Diretor (GB)
Servico de Informacao e Documentacao (SID)
Caixa Postal 515 - CEP 12.245-970
Sao Jose dos Campos - SP - Brasil
Tel.:(012) 3945-6911/6923
Fax: (012) 3945-6919
E-mail: [email protected]
CONSELHO DE EDITORACAO:
Presidente:
Dr. Gerald Jean Francis Banon - Coordenacao Observacao da Terra (OBT)
Membros:
Dra Maria do Carmo de Andrade Nono - Conselho de Pos-Graduacao
Dr. Haroldo Fraga de Campos Velho - Centro de Tecnologias Especiais (CTE)
Dra Inez Staciarini Batista - Coordenacao Ciencias Espaciais e Atmosfericas (CEA)
Marciana Leite Ribeiro - Servico de Informacao e Documentacao (SID)
Dr. Ralf Gielow - Centro de Previsao de Tempo e Estudos Climaticos (CPT)
Dr. Wilson Yamaguti - Coordenacao Engenharia e Tecnologia Espacial (ETE)
BIBLIOTECA DIGITAL:
Dr. Gerald Jean Francis Banon - Coordenacao de Observacao da Terra (OBT)
Marciana Leite Ribeiro - Servico de Informacao e Documentacao (SID)
Jefferson Andrade Ancelmo - Servico de Informacao e Documentacao (SID)
Simone A. Del-Ducca Barbedo - Servico de Informacao e Documentacao (SID)
REVISAO E NORMALIZACAO DOCUMENTARIA:
Marciana Leite Ribeiro - Servico de Informacao e Documentacao (SID)
Marilucia Santos Melo Cid - Servico de Informacao e Documentacao (SID)
Yolanda Ribeiro da Silva Souza - Servico de Informacao e Documentacao (SID)
EDITORACAO ELETRONICA:
Viveca Sant´Ana Lemos - Servico de Informacao e Documentacao (SID)

INPE-14467-TDI/1148
FILTRAGEM DE SINAIS DE RADIOINTERFERENCIA
NOS ESPECTROS DE EXPLOSOES SOLARES
ATRAVES DE REDE NEURAL ADALINE
Kleber de Mattos Dobrowolski
Dissertacao de Mestrado do Curso de Pos-Graduacao em Computacao Aplicada,
orientada pelos Drs. Jose Demisio Simoes da Silva, e Jose Roberto Cecatto,
aprovada em 31 de marco de 2004
Registro do documento original:
<http://urlib.net/sid.inpe.br/jeferson/2004/06.08.08.13>
INPE
Sao Jose dos Campos
2009

Dados Internacionais de Catalogacao na Publicacao (CIP)
Dobrowolski, Kleber de Mattos.D656f Filtragem de sinais de radiointerferencia nos espectros de ex-
plosoes solares atraves de rede neural adaline / Kleber de MattosDobrowolski. – Sao Jose dos Campos : INPE, 2009.
126 p. ; (INPE-14467-TDI/1148)
Dissertacao (Mestrado em Computacao Aplicada) – InstitutoNacional de Pesquisas Espaciais, Sao Jose dos Campos, 2004.
Orientadores : Drs. Jose Demisio Simoes da Silva, e Jose Ro-berto Cecatto.
1. Redes neurais. 2. Filtros adaptaveis. 3. Reducao deruıdo. 4. Interferencia em Radio-Frequencia. 5. Explosoes solares.I.Tıtulo.
CDU 004.032.26
Copyright c© 2009 do MCT/INPE. Nenhuma parte desta publicacao pode ser reproduzida, arma-zenada em um sistema de recuperacao, ou transmitida sob qualquer forma ou por qualquer meio,eletronico, mecanico, fotografico, reprografico, de microfilmagem ou outros, sem a permissao es-crita do INPE, com excecao de qualquer material fornecido especificamente com o proposito de serentrado e executado num sistema computacional, para o uso exclusivo do leitor da obra.
Copyright c© 2009 by MCT/INPE. No part of this publication may be reproduced, stored in aretrieval system, or transmitted in any form or by any means, electronic, mechanical, photocopying,recording, microfilming, or otherwise, without written permission from INPE, with the exceptionof any material supplied specifically for the purpose of being entered and executed on a computersystem, for exclusive use of the reader of the work.
ii



Ao meu grande amigo Renato Ferreira Coimbra dos Santos, que nunca me deixou
desistir nas horas difíceis.


RESUMO
O Espectrógrafo Solar Brasileiro (Brazilian Solar Spectroscope - BSS) é um radiotelescópio de alta sensibilidade e alta resolução temporal e espectral, desenvolvido no Instituto Nacional de Pesquisas Espaciais (INPE) para o estudo do espectro das emissões solares na banda de ondas de rádio decimétricas (1000- 2500 MHz). Ele está sujeito às mais diversas fontes de Interferências em Rádio Freqüências (IRF), tais como satélites artificiais, transmissores de estações de rádio e TV, telefonia móvel, etc. Este trabalho apresenta o desenvolvimento de um filtro adaptável, utilizando a abordagem dos trabalhos de Widrow (1975) em cancelamento de ruído, para a redução ou mesmo eliminação destes sinais de IRF. O algoritmo utilizado foi o Least-Mean Square (LMS, Menor Média Quadrática), devido à sua simplicidade de implementação e menor complexidade computacional, já que existe cerca de 3 anos de dados a serem processados. Para estimar os sinais de interferência foi utilizada uma metodologia baseada em interpolação linear, uma vez que os dados no canal contaminado pela interferência são desconhecidos. Seguindo esta abordagem, ouve um problema com a convergência do filtro, que foi sanado através de modificações nos parâmetros do filtro original. Além disto, foi criada uma versão não-linear do filtro, e realizada uma comparação entre estes três tipos de implementação de filtro adaptável: a verão original de Widrow, uma versão “modificada linear” e uma versão “modificada não-linear”. A versão modificada linear foi a mais efetiva na tarefa de reduzir os sinais de IRF dos dados do BSS, obtendo atenuações entre 5 e 30 dB nos sinais de IRF. Através destes resultados, este trabalho conseguiu demonstrar a viabilidade da utilização da técnica de filtragem adaptável nos dados do instrumento BSS. Sugestões sobre aperfeiçoamentos futuros no filtro adaptável modificado são discutidas nas conclusões.


NOISE FILTERING ON SOLAR BURSTS SPECTRUM USING ADALINE NEURAL NETWORK
ABSTRACT
The Brazilian Solar Spectroscope (BSS) is a high sensitivity and high temporal/frequency resolution radio spectroscope, developed at the National Institute for Space Research (INPE). This spectroscope is dedicated to observations of the solar emission in decimetric wavelengths (1000-2500 MHz). BSS feeder is subjected to Radio-Frequency Interference (RFI) signals, such as artificial satellites, radio and TV broadcast, and mobile phone broadcasting stations, etc. Here, it is presented development of an adaptive filter, making use of Widrow’s (1975) noise cancellation approach, for either minimize or eliminate these RFI signals. It makes use of the Least-Mean Square (LMS) algorithm, due to its simplicity on implementation and less computational complexity, since there is about 3 years of data to be processed. For estimate the original signal as well as interference in the affected frequency channel, since there is no prior knowledge of them, a simple process based on linear interpolation was used. The initial filter’s convergence difficulty was fixed through modifications on its original parameters. Moreover, a nonlinear version of the filter was created, and a comparison among three types of adaptable filter implementation: the Widrow’s original filter, a linear modified version and a nonlinear modified done. The modified linear version showed the best performance being most effective in reducing power of RFI signals in BSS data with attenuations between 5 and 30 dB. This work demonstrates the feasibility of use adaptable filtering technique on minimizing/reducing RFI signals in BSS data. Suggestions for future improvements in the modified adaptive filter are discussed in conclusions.

SUMÁRIO
Pág. LISTA DE FIGURAS
LISTA DE TABELAS
CAPÍTULO 1 INTRODUÇÃO ..................................................................................21
1.1 A Filtragem de Sinais Espúrios nos Dados Científicos - Escopo do Trabalho......26
CAPÍTULO 2 O BRAZILIAN SOLAR SPECTROSCOPE E SINAIS DE
INTERFERÊNCIA NA BANDA DE ONDAS DE RÁDIO
DECIMÉTRICAS................................................................................29
2.1 O Brazilian Solar Spectroscope e as Investigações de Fenômenos Solares ..........29
2.2 Espectro Eletromagnético de Absorção da Atmosfera Terrestre ...........................33
2.3 O Problema da Interferência em Radiofreqüências ...............................................34
2.4 Interferência em Radiofreqüências Interna ............................................................35
2.5 Interferência em Radiofreqüências Externa ...........................................................35
2.6 Sinais IRF na Banda de Ondas de Rádio Decimétricas .........................................37
CAPÍTULO 3 REDES NEURAIS ARTIFICIAIS.....................................................41
3.1 Introdução ..............................................................................................................41
3.2 O Perceptron ..........................................................................................................42
3.3 Rede ADALINE.....................................................................................................44 3.3.1 Algoritmo LMS................................................................................................................................ 45 3.3.2 Linha de Atrasos e Filtro Adaptável ............................................................................................... 46 3.4 Perceptrons de Múltiplas Camadas e Algoritmo de Retropropagação..................49
CAPÍTULO 4 ASPECTOS PRÁTICOS DO FILTRO ADAPTÁVEL ...................53
4.1 Filtro Adaptável .....................................................................................................53
4.2 Entradas para o Filtro Adaptável ...........................................................................54
4.3 Taxa de Aprendizagem (Parâmetro α)...................................................................56
4.4 Número de Taps .....................................................................................................62
4.5 Pesos.......................................................................................................................63
4.6 Limiar.....................................................................................................................65

4.7 Função de Ativação................................................................................................65
4.8 Visão Geral do Processo ........................................................................................66
4.9 Aplicações Práticas do Filtro Adaptável ................................................................68
CAPÍTULO 5 MATERIAL E METODOLOGIA DE TRABALHO ......................75
5.1 Introdução ..............................................................................................................75
5.2 Dados do Instrumento BSS ....................................................................................76
5.3 Formato dos Arquivos de Dados............................................................................78
5.4 Programa BSSData ................................................................................................79
5.5 Arquivos de Dados Utilizados neste Trabalho.......................................................82
5.6 Calibração do BSS e Método de Medição da Atenuação ......................................86
5.7 Conversão da Intensidade de Atenuação para a Escala de dB...............................89
5.8 Filtragem Adaptável...............................................................................................96
5.9 Canal de Saída Estimado e Interferência Estimada ...............................................97
5.10 Determinação dos Parâmetros Para o Filtro Adaptável .......................................100
CAPÍTULO 6 RESULTADOS OBTIDOS...............................................................103
6.1 Aplicação da Filtragem Adaptável.......................................................................103
6.2 Comparação entre as Diferentes Implementações do Filtro Adaptável ...............106
6.3 Comparações entre o Filtro Linear Modificado e o Não-Linear Modificado ......107
6.4 Atenuação Obtida pelo Filtro Adaptável .............................................................110
6.5 Resultados para a Aplicação do Filtro a Outros Arquivos de Dados...................111
CAPÍTULO 7 CONCLUSÕES E PERSPECTIVAS ..............................................117
7.1 Conclusões ...........................................................................................................117
7.2 Perspectivas Futuras.............................................................................................118
REFERÊNCIAS BIBLIOGRÁFICAS .....................................................................121
APÊNDICE A - TRABALHOS APRESENTADOS .............................................. 127
APÊNDICE B - ATRIBUIÇÃO DE FAIXAS DE FREQÜÊNCIAS..................... 129
APÊNDICE C – ABERTURA DE ARQUIVOS .ESP NO BSSVIEW.................. 135
APÊNDICE D – FILTROS DIGITAIS ................................................................... 143
APÊNDICE E – CÓDIGOS FONTES .................................................................... 149

LISTA DE FIGURAS
Pág.
1.1 – Espectro dinâmico típico de explosões solares em ondas de rádio. ................. 22
1.2 – Atribuição de faixas de freqüência no Brasil (excerto de 900-2600 MHz)...... 25
2.1 – Espectro dinâmico de explosão solar observada pelo BSS em 27/06/99. ........ 30
2.2 – Antena parabólica de 9 metros do Brazilian Solar Spectroscope. .................. 31
2.3 – Espectro dinâmico visualizado no BSSView. .................................................. 32
2.4 – Espectro eletromagnético, exibindo a transparência relativa da ionosfera e
atmosfera terrestre. ........................................................................................... 34
2.5 – Exemplo de espectro dinâmico corrompido por sinal de IRFE coletado pelo
BSS. ................................................................................................................ 38
3.1 – Esquema de um Perceptron . ........................................................................... 42
3.2 – Tipo de função de ativação do neurônio de Rosemplatt. ................................. 43
3.3 – Arquitetura de uma rede ADALINE. ............................................................. 44
3.4 – Linha de atrasos conectada a uma rede ADALINE. ........................................ 47
3.5 – Sistema adaptável de cancelamento de ruído. .................................................. 48
3.6 – Filtro adaptável utilizado na eliminação de ruído em eletrocardiograma:
(a) entrada contaminada, (b) interferência referência, (c) resultado final. ....... 49
3.7 – Diagrama de uma rede de Perceptrons de múltiplas camadas. ........................ 50

3.8 – Exemplo de eliminação de ruídos utilizando rede de retropropagação........... 51
4.1 – Esquema dos sinais envolvidos em um procedimento de filtragem adaptável. 55
4.2 – Entradas e saída típicas de um filtro adaptável. ............................................... 55
4.3 – Variação estocástica do peso e do limiar em torno do “ponto ótimo”. ............ 57
4.4 – Parâmetro α muito grande, gerando instabilidade e divergência no peso e no
limiar. ............................................................................................................... 58
4.5 – Transiente no sinal de entrada (esquerda) causando instabilidade nos pesos
do filtro adaptável (direita).............................................................................. 59
4.6 – Relação entre o valor do parâmetro α e o tempo de convergência. ................. 60
4.7 – Readaptação dos pesos e limiar em um filtro adaptável. ................................. 61
4.8 – Defasagem entre o sinal de interferência e a interferência real..................... 62
4.9 – Influência da diferença de intensidade no sinal de interferência, no
comportamento dos pesos. ............................................................................... 64
4.10 – Influência do offset do sinal de interferência, no comportamento do limiar. ... 65
4.11 – Funções de ativação: função rampa (esquerda) e função logística (direita)..... 66
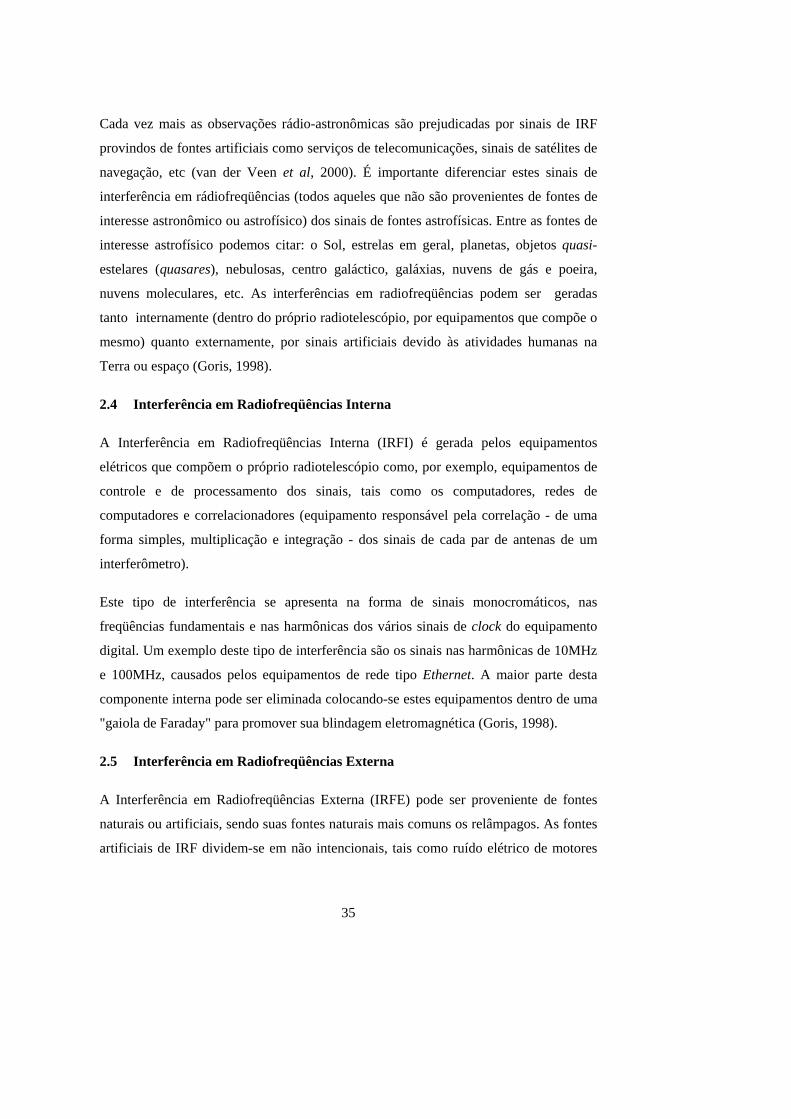
4.12 – Visão esquemática em fases do funcionamento do limiar, pesos e taps no
filtro adaptável.................................................................................................. 67
4.13 – Filtro adaptável aplicado em acústica. ............................................................. 68
4.14 – Filtro adaptável utilizado em uma aplicação aeronáutica típica....................... 69
4.15 – Filtro adaptável separando os sinais de ECG de uma gestante dos sinais de
ECG de um feto. ............................................................................................... 70
4.16 – Filtro adaptável eliminando a interferência de 60 Hz dos sinais de ECG...... 71

4.17 – Filtro adaptável utilizado em radioastronomia. ................................................ 72
5.1 – Diagrama dos equipamentos e processos utilizados na filtragem adaptável.... 75
5.2 – Diagrama representando o Brazilian Solar Spectroscope . ............................. 76
5.3 – Visão geral do programa BSSData................................................................... 79
5.4 – Janela do gerenciador de projetos. ................................................................... 80
5.5 – Visualização de um arquivo .ESP do BSS no programa BSSData. ................. 81
5.6 – Arquivo de dados visualizado com paleta “Red Temperature”. ...................... 82
5.7 – Arquivo de dados visualizado com paleta “Stern Special”. ............................. 82
5.8 – Arquivos com linha de interferência (esquerda) e respectivo cabeçalho
(direita). ............................................................................................................ 84
5.9 – Arquivos de calibração (esquerda) e respectivo cabeçalho (direita). ............... 85
5.10 – Arquivos com fenômeno solar e linha de interferência (esquerda) e
respectivo cabeçalho (direita)........................................................................... 86
5.11 – Perfil temporal em um canal de freqüência (acima) e espectro dinâmico
(abaixo) de uma calibração............................................................................... 88
5.12 – Fluxograma com procedimentos aplicados no arquivo de calibração.............. 90
5.13 – Espectro dinâmico tridimensional de um arquivo de calibração................... 91
5.14 – Detalhe de um perfil temporal de um canal de freqüência de um arquivo de
calibração, exibindo transientes. ...................................................................... 92
5.15 – Médias dos intervalos de calibração em um perfil temporal............................ 92
5.16 – Gráfico de relação entre atenuação e intensidade. ........................................... 94

5.17 – Diferença na resposta do BSS em relação aos canais 16 e 50.......................... 95
5.18 – Diagrama de blocos da criação da saída estimada e interferência estimada. ... 98
5.19 – Perfis temporais dos canais 79, 76 e 80 do arquivo 050702F3.ESP
(esquerda) e estimação do canal de saída por interpolação linear (direita)...... 98
5.20 – Perfil temporal da interferência estimada......................................................... 99
5.21 – Fluxograma exibindo a utilização dos sinais estimados................................. 100
5.22 – Resultados obtidos com a procura do parâmetro α ideal. .............................. 101
6.1 – Arquivo 050702F3.ESP: comparação entre o arquivo original ( superior) e o
arquivo após ser processado pelo filtro adaptável ( inferior). ........................ 104
6.2 – Vista tridimensional do arquivo 050702F3.ESP original, com uma linha de
interferência no canal 79. ............................................................................... 104
6.3 – Arquivo 050702F3.ESP após os dados serem processados pelo filtro
adaptável......................................................................................................... 105
6.4 – Comparação entre a saída do filtro adaptável e o sinal estimado, no início do
processo de filtragem (esquerda) e ao final (direita). ..................................... 106
6.5 – Comparação entre as saídas dos filtro adaptável (esquerda) e de sua
modificação (direita) ...................................................................................... 107
6.6 – Curvas da soma do erro quadrático para o filtro linear adaptável modificado
(esquerda) e não-linear modificado (direita). ................................................. 108
6.7 – Sinal de calibração do canal 80 (esquerda) e curva de aproximação para a
conversão entre unidades de intensidade e dBs.............................................. 110
6.8 – Comparação entre sinal o original, o processado pelo filtro adaptável e o
sinal de calibração correspondente................................................................. 111

6.9 – Vista tridimensional do arquivo 040601C9.ESP original (acima) e após ser
processado pelo filtro adaptável (inferior). .................................................... 112
6.10 – Arquivo 040601C9.ESP: comparação entre o arquivo original ( superior) e o
arquivo após ser processado pelo filtro adaptável ( inferior). ........................ 113
6.11 – Arquivo 090401C3.ESP: comparação entre o arquivo original (superior) e o
arquivo após ser processado pelo filtro adaptável (inferior). ......................... 113
6.12 – Vista tridimensional do arquivo 090401C3.ESP original (acima) e após ser
processado pelo filtro adaptável (inferior). .................................................... 114
7.1 – Diagrama de blocos representando o protótipo do novo programa BSSData,
com a inclusão do filtro adaptável.................................................................. 119


LISTA DE TABELAS
Pág.
1.1 – Principais instrumentos para observação solar na banda de rádio em
operação no mundo. ......................................................................................... 24
2.1 – Espectrógrafos solares em operação em ondas de rádio métricas-
decimétricas...................................................................................................... 33
4.1 – Fatores importantes na escolha da taxa de aprendizagem ideal. ...................... 61
5.1 – Parâmetros do sistema de aquisição do BSS. ................................................... 77
5.2 – Campos do cabeçalho de um arquivo .esp. ...................................................... 78
5.3 – Relação entre níveis de potência de saída e atenuação em dB. ........................ 89
5.4 – Relação entre atenuação em dB e unidades arbitrárias para o perfil temporal
do canal 22........................................................................................................ 93
5.5 – Taxas de aprendizagem obtidas e média. ....................................................... 102
6.1 – Parâmetros utilizados no filtro adaptável. ...................................................... 103
6.2 – Desempenho dos filtros adaptáveis. ............................................................... 106
6.3 – Comparação entre a soma do erro quadrático das duas versões de filtro
adaptável modificado. .................................................................................... 108
6.4 – Comparação entre os tempos de execução das duas versões de filtro
adaptável......................................................................................................... 109
6.5 – Atenuações obtidas pelo filtro adaptável........................................................ 115


21
CAPÍTULO 1
INTRODUÇÃO
Explosões solares são fenômenos responsáveis pela liberação de uma grande quantidade
de energia (1019 – 1025 J; isto equivale a dezenas de bilhões de vezes a energia da
bomba atômica lançada em Hiroxima) em intervalos de tempo que variam de segundos
a até 2 horas, para os fenômenos mais energéticos. Estes fenômenos ocorrem na
atmosfera solar (cromosfera e coroa), onde as temperaturas são de centenas de milhares
a poucos milhões de graus, dentro de regiões densas de campo magnético muito intenso
(de centenas a alguns milhares de Gauss), em forma de arcos, conhecidas como regiões
ativas. A Figura 1.1 exibe o perfil temporal típico de uma explosão solar em vários
comprimentos de onda, desde ondas de rádio até raios-X e raios gama (Cecatto, 1996;
Fernandes, 1997). Já a Figura 1.2 apresenta o espectro típico de explosões observadas
em ondas decamétricas, métricas e decimétricas. Detalhes sobre explosões solares, em
particular daquelas observadas na banda de ondas métricas-decimétricas podem ser
obtidos na literatura, como por exemplo McLean e Labrum, 1985.
FIGURA 1.1 – Perfil temporal típico de explosões solares em vários comprimentos de onda do espectro eletromagnético. FONTE: Adaptada de Kane (1974, p. 105).

22
FIGURA 1.2 – Espectro dinâmico típico de explosões solares em ondas de rádio. FONTE: Adaptada de Dulk (1985, p. 169).
Toda a energia liberada no fenômeno aquece o gás ambiente e/ou acelera as partículas e
íons que interagem com o campo magnético e o gás ambiente, emitindo radiação
eletromagnética num amplo espectro de freqüências, desde ondas de rádio até raios-X e
raios gama. Associado ao fenômeno também podem haver feixes de partículas
energéticas que escapam para o espaço ou bolhas de gás e campo magnético que são
ejetadas para fora da atmosfera solar (Cecatto et al., 2003).
Porém, ainda existem várias questões sobre o fenômeno das explosões solares que
necessitam de resposta: (1) a causa das explosões solares ainda não está totalmente
definida; (2) como uma quantidade imensa de energia é armazenada na atmosfera solar;
(3) o que causa sua liberação repentina; e (4) como ocorre a aceleração de um número
gigantesco (1030 – 1035) de partículas a energias que vai de dezenas de keV a alguns
MeV (1eV = 1,6x10-19J).

23
Além disso, é bem conhecido o efeito das radiações ionizantes e feixes de partículas
energéticas sobre a magnetosfera e ionosfera terrestres, causando perturbações em:
sistemas de navegação, sistemas de fornecimento e distribuição de energia,
radiodifusão, telecomunicações, órbita e equipamentos de satélites artificiais em órbita
terrestre, etc. Desta maneira, a pesquisa científica do fenômeno das explosões solares,
para tentar prever e/ou minimizar seus efeitos sobre as atividades humanas é de
fundamental importância (Cecatto et al., 2003).
Existem vários instrumentos que foram construídos, dedicados à observação e
investigação dos fenômenos solares, particularmente das explosões solares. Na faixa de
ondas de rádio, existem vários heliógrafos e espectrógrafos em operação ao redor da
superfície terrestre. A Tabela 1.1 apresenta uma relação com alguns dos principais
instrumentos para observação solar em operação no mundo. No Brasil, existe um
espectrógrafo conhecido como “Brazilian Solar Spectroscope” (BSS, daqui para frente)
que observa diariamente (11-19 UT) o espectro do Sol dentro da banda de rádio,
especificamente na faixa de comprimentos de onda decimétricos. Este instrumento está
em operação com altas resoluções em freqüência (20, 50, 100 canais de freqüência) e
em tempo (10, 20, 50, 100, 200, e 1000 ms) desde 1998 (Sawant et al., 1996; 2001).
Maiores detalhes sobre este instrumento são dados no Capítulo 2.

24
TABELA 1.1 – Principais instrumentos para observação solar na banda de rádio em operação no mundo.
Observatório País Freqüências Tipo GMRT Índia 38 , 1400 MHz Map. bidimensional Gauribidanur Índia 40 - 150 MHz Map. bidimensional Nançay França 150 - 450 MHz Map. bidimensional RATAN-600* Rússia 1 - 20 GHz Feixe largo OVRO USA 1 - 18 GHz Map. Bidimensional / Varredura
freqüência Siberian SRT Rússia 5,7 GHz Map. Bidimensional/ Feixe largo Nobeyama Japão 17,34 GHz Map. bidimensional VLA USA 1.4/4.9/8.4 GHz Map. bidimensional 15/22.5/43 GHz BIMA USA 100 GHz Map. bidimensional BDA BRASIL 1200-1700 MHz Map. bidimensional 2700, 5000 MHz Itapetinga* Brasil 48 GHz Antena multi-feixe SST Argentina 212, 410 GHz Antena freqüência fixa Metsahovi* Finlândia 22, 37, 90 GHz Antena freqüência fixa BSS Brasil 1000-2500 MHz Espectrógrafo
FONTE: Adaptada de Sawant (2001, p. 10).
A emissão de rádio de explosões solares na faixa decimétrica é muito importante porque
se origina de regiões da atmosfera solar próximas ao local onde ocorre a aceleração das
partículas emissoras. Este fato foi constatado pelas observações do experimento
SKYLAB na década de 70. Naquelas regiões, as densidades de partículas são da ordem
de 1015 – 1016 m-3 (Sturrock, 1980). Assim, a investigação nesta faixa de comprimentos
de onda fornece informação sobre o mecanismo de aceleração das partículas. Por este
motivo, nas últimas décadas cresceu o número de instrumentos, principalmente os
espectrógrafos em solo terrestre, operando em ondas de rádio decimétricas para a
investigação científica dos fenômenos solares explosivos.
Entretanto, na última década também cresceu, assustadoramente, o uso da banda de
ondas de rádio - inclusive das faixas reservadas pela legislação para uso científico pela
radioastronomia - para fins comerciais. A carta eletromagnética brasileira (Anatel,
2003), contendo as bandas permitidas para uso comercial, militar, científico, etc, está no
Apêndice 1. A banda de ondas decimétricas de interesse deste trabalho é mostrada na

25
Figura 1.3. Atualmente, já está bem difundido e sabido o uso desta faixa do espectro de
rádio por provedores de internet e telefonia móvel. Estes sinais, dentro das bandas de
uso da radioastronomia causam grande perturbação, criando interferências, nos sinais
captados por instrumentos científicos.
FIGURA 1.3 – Atribuição de faixas de freqüência no Brasil (excerto 900-2600 MHz). FONTE: Adaptada de Anatel (2003).

26
Durante alguns anos (1999-2002), os dados de observações de explosões solares
coletados pelo instrumento BSS foram contaminados pelas interferências geradas por
sinais de provedores de internet via rádio e telefonia celular. Estes sinais espúrios
causaram interferências indevidas e meios para minimizá-los ou extraí-los daqueles
dados já registrados se fazem necessários. Isto para obter informação de qualidade a
partir dos dados registrados e permitir seu uso adequado nas investigações científicas.
Um dos principais meios de tratar os sinais espúrios já registrados nos dados coletados é
através da aplicação de filtragem.
1.1 A Filtragem de Sinais Espúrios nos Dados Científicos - Escopo do Trabalho
Widrow e Stearns (1985) apresentam um estudo detalhado da aplicação de filtros
adaptáveis para o cancelamento de interferências.
Os filtros digitais adaptáveis têm capacidade de se auto-ajustarem de acordo com seus
sinais de entrada. Assim, um filtro digital adaptável pode ser usado em aplicações que
requerem características diferentes em resposta às variações das condições dos sinais.
Basicamente, um filtro digital requer um sinal de entrada e um sinal de referência. A
apresentação de tais sinais leva a uma atualização dos coeficientes do filtro que é
realizada por um algoritmo. O filtro digital adaptável é um tipo especial de filtro de
resposta ao impulso finito (FIR), mas também pode ser um filtro de resposta ao impulso
infinito (IIR), ou qualquer outro tipo de filtro (Widrow e Stearns, 1985).
As aplicações dos filtros digitais são inúmeras, como por exemplo, previsão linear,
tratamento adaptável de sinais, controle adaptável e cancelamento adaptável de ruído ou
de interferências.
Nas duas últimas décadas muitos algoritmos computacionais eficientes para filtragem
digital adaptável foram propostos. Eles são baseados em abordagens estatísticas, tais
como o algoritmo Least-Mean Square (LMS - Menor Média Quadrática) ou abordagens
determinísticas como o algoritmo Recursive Least-Squares (RLS - Menor Quadrado
Recursivo). O algoritmo LMS tem como vantagem a simplicidade de implementação,

27
mas o RLS converge mais rapidamente apesar de maior complexidade computacional,
segundo Widrow e Stearns (1985).
Paraskeva (2003) apresenta um estudo com avaliação e resultados da aplicação de
diferentes tipos de filtros FIR. Nesta dissertação são empregados os filtros digitais
implementados pelo algoritmo LMS, como desenvolvido por Widrow (Demuth e Beale,
2003). A implementação do filtro é feita utilizando o algoritmo Adaptive Linear
Element (ADALINE - Elemento Linear Adaptável) como descrito em Haykin (2001),
classificado como um tipo de Rede Neural Artificial. O filtro mencionado é utilizado
para tentar cancelar interferências em dados de explosões solares coletados pelo
instrumento BSS do INPE, como mencionado anteriormente. As interferências são
geradas principalmente por sinais de provedores de internet via rádio e telefonia celular,
podendo haver intermitências ao longo do dia. Os filtros digitais utilizados para
cancelamento de interferências pressupõem a existência de um sinal de referência (a
interferência) que, para o caso, não está disponível. Assim, nesta dissertação utiliza-se
uma estimativa dos sinais de interferência com base em dados coletados pela antena, e o
filtro é aplicado para eliminar as interferências em arquivos de dados existentes. O
procedimento para extrair o sinal de interferência é mencionado no Capítulo 5.
O objetivo do estudo é conceber um modelo que possa ser implementado em hardware
para ser empregado diretamente na antena do sistema de recepção de dados, eliminando
tarefas exaustivas de tratamento de dados pós-recepção.
A aplicação do filtro adaptável como proposto nesta dissertação produziu resultados
importantes. O mais significativo foi que sua aplicação ao sinal de interferência, que
possui uma natureza randômica, em um canal de freqüência, gera uma redução de até 30
dB neste sinal mantendo as características originais do restante dos dados coletados.
Neste trabalho, no Capítulo 2 apresenta-se uma descrição detalhada sobre o instrumento
Brazilian Solar Spectroscope (BSS) e as características dos dados coletados. No
Capítulo 3 é discutida a teoria de redes neurais e métodos de filtragem. O filtro que foi
desenvolvido para tratar os dados registrados pelo instrumento BSS é detalhado no
Capítulo 4. O Capítulo 5 mostra a metodologia criada para a aplicação do filtro

28
adaptável nos dados do instrumento BSS, enquanto o Capítulo 6 mostra e discute os
resultados da aplicação do filtro desenvolvido àqueles dados. O Capítulo final apresenta
as conclusões e perspectivas futuras do trabalho.

29
CAPÍTULO 2
O BRAZILIAN SOLAR SPECTROSCOPE E SINAIS DE INTERFERÊNCIA NA
BANDA DE ONDAS DE RÁDIO DECIMÉTRICAS
2.1 O Brazilian Solar Spectroscope e as Investigações de Fenômenos Solares
O instrumento conhecido por Brazilian Solar Spectroscope (BSS) foi desenvolvido, no
início da década de 90 (1992), para investigar os fenômenos solares explosivos
relacionados à região de aceleração de partículas. Inicialmente, foi desenvolvido para
operar numa estreita banda (1500-1700 MHz) de freqüências com resoluções temporal
de 100 ms e de até 50 canais em freqüência. A resolução em freqüência do instrumento
era de 3 MHz. Com a combinação adequada de resolução temporal, largura de banda e
resolução em freqüência o instrumento permitia observações com sensibilidade da
ordem de 2-3 Unidades de Fluxo Solar – UFS – 1 UFS = 10-22 W/m2Hz (Sawant et al.,
1993).
Em meados da década de 90 (1995), o instrumento incorporou medidas de tempo
absoluto a partir de um decodificador de tempo do sinal de GPS tomado a partir do
prédio do Centro de Controle de Satélites (CCS) do INPE, São José dos Campos. Este
sistema de obtenção do sinal de tempo possuía uma precisão absoluta de 3 ms. Naquela
época o Sol estava no período de mínimo do ciclo de atividade – baixa freqüência de
ocorrência de fenômenos solares explosivos. O ciclo seguinte se iniciou em 1997.
Naquele ano, o BSS começou a ser reformulado. Foram criados softwares para permitir
a visualização em tempo quasi-real - após 5 minutos do registro dos dados em disco
rígido do microcomputador - e a análise preliminar dos dados coletados pelo
instrumento. Estes softwares foram desenvolvidos em linguagem Interactive Data
Language (IDL). O primeiro permite a visualização dos espectros dinâmicos, após o
registro dos dados no disco rígido do microcomputador. Como cada arquivo de dados é
adquirido durante 5 minutos, o espectro dinâmico aparece na tela do microcomputador
de visualização após 5 minutos do início da aquisição de dados. A Figura 2.1 mostra um
exemplo de espectro dinâmico (gráfico de tempo nas abscissas versus canal de
freqüência nas ordenadas versus intensidade, definida através de uma escala de cores)

30
obtido de observações de fenômenos solares. O segundo software permite o tratamento
preliminar dos dados - perfil temporal de determinado canal, espectro de um dado
instante de tempo, subtração de background, etc (Sawant et al., 2000).
FIGURA 2.1 – Espectro dinâmico de explosão solar observada pelo BSS. FONTE: Adaptada de Nascimento et al. (2002, p. 7).
Também foi aperfeiçoado o software de aquisição de dados permitindo a escolha e
ajuste das resoluções temporal e em freqüência e a largura de banda de freqüências de
observação. Desta forma, tornou-se possível, a partir de 1998, a escolha da resolução
temporal das observações entre, 10, 20, 50, 100, 200 e 1000 ms. Também se tornou
possível a escolha entre 25, 50 e 100 canais de freqüência de observação (Faria, 1999).
Além disso, a banda de freqüências de observação poderia ser ajustada selecionando a
banda de operação do analisador espectral que funcionava como um receptor de
varredura em freqüência no modo-Z (intensidade do sinal). Este sistema opera junto a
uma antena de 9 m de diâmetro equipada no foco com um alimentador log-periódico,
que permite a aquisição do sinal dentro de uma banda de 1000-2500 MHz (Sawant et
al., 1996).
Ainda em 1998 iniciaram-se observações regulares e sistemáticas das explosões solares
pois o Sol já estava se aproximando do máximo do ciclo de atividade – período durante

31
o qual aumenta drasticamente a ocorrência de fenômenos solares explosivos. Esses
fenômenos podem afetar a Terra e as atividades humanas de várias formas. Alguns
exemplos são as perturbações nas telecomunicações, perturbações na órbita de satélites,
perturbações nos sistemas de navegação, e até a produção de blecautes em casos
extremos. As investigações científicas destes fenômenos explosivos de origem solar são
importantes para que seja possível uma melhor compreensão a respeito dos fenômenos
com o intuito de que sejam evitados ou, pelo menos, minimizados seus efeitos sobre as
atividades humanas (Cecatto et al., 2003).
Em suma, o BSS é um radioespectrógrafo decimétrico de banda larga (1000-2500 MHz)
que opera diariamente das ~11:30 – 18:00 UT, junto a uma antena parabólica de 9 m de
diâmetro – vide Figura 2.2, desde abril de 1998 no INPE de São José dos Campos. Suas
principais características são a resolução em freqüência de 3 MHz e temporal ajustável
em 10, 20, 50, 100, 200 e 1000 ms (Sawant et al., 1996 e 2001; Martinon e Fernandes,
2000).
FIGURA 2.2 – Antena parabólica de 9 metros do Brazilian Solar Spectroscope. FONTE: Adaptada de Martinon e Fernandes (2000, p. 9).
Por sua vez, os dados do instrumento são digitalizados e armazenados em disco rígido
de um microcomputador para posterior visualização e processamento. O processo de

32
visualização é efetuado pelo software BSSView que foi desenvolvido para essa
finalidade (Faria, 1999).
Um exemplo de visualização de um arquivo de dados feito pelo BSSView pode ser visto
na Figura 2.3. A tela gráfica do BSSView apresenta o arquivo de dados no formato que
é designado por Espectro Dinâmico. Desta forma, pode-se visualizar todo o arquivo de
dados que foi adquirido segundos após seu armazenamento em disco.
FIGURA 2.3 – Espectro dinâmico visualizado no BSSView. FONTE: Adaptada de Nascimento et al. (2002, p. 6).
A linha de Pesquisas de Física do Meio Interplanetário (FMI) da Divisão de Astrofísica
(DAS) do INPE utiliza as observações solares realizadas pelo BSS para investigar os
fenômenos associados à liberação de energia dos flares solares, através da análise das
explosões solares decimétricas observadas principalmente acima de 1000 MHz,
particularmente emissões tipo III, e estruturas finas, que apresentam uma banda estreita
em freqüência e curta duração, daí a necessidade de altas resoluções temporal e
espectral (Martinon e Fernandes, 2000).
Na faixa de ondas decimétricas o BSS é o único espectrógrafo da América Latina,
conforme pode ser visto na Tabela 2.1. O BSS participa desde 1999 de observações
solares conjuntas com diversos observatórios em solo, tal como o VLA, e satélites tais
como SOHO e RHESSI, promovidas pelo Maximum Millenium Program (Fernandes,
2003).

33
TABELA 2.1 – Espectrógrafos solares em operação em ondas de rádio métricas-decimétricas.
Observatório
Banda de Freqüência(MHz)
Resolução Temporal (ms)
Bern, Suíça 100-8000 0,5-1000
Ondrejov, Rep. Checa 800-2000 2000-4500
100 100
Beijing, China 1000-2000 2600-3800
8 100
Hiraiso, Japão 500-2500 500
Culgoora, Austrália 18-1800 3000
INPE, Brasil 1000-2500 10-1000
FONTE: Adaptada de Fernandes (2003, p. 6).
2.2 Espectro Eletromagnético de Absorção da Atmosfera Terrestre
Nem toda radiação eletromagnética proveniente do espaço atinge o solo terrestre. A
maior parte desta radiação é absorvida ou espalhada antes de chegar ao solo. A
absorção-espalhamento ocorre, pela ionosfera terrestre abaixo de 10 MHz, e pela
atmosfera em várias bandas até o ultravioleta mais energético, a partir do qual a
absorção-espalhamento é total até as freqüências maiores correspondentes aos raios-X e
raios-Gama (Kraus, 1986). A pequena parte da radiação que atinge o solo, o faz através
de determinadas bandas chamadas “janelas”. “Janelas” são regiões do espectro
eletromagnético em que a radiação atravessa toda a atmosfera e a ionosfera sem
absorção e reflexão significativas. A Figura 2.4 apresenta o espectro eletromagnético,
indicando as regiões onde a atmosfera é opaca, e as janelas, onde a radiação atravessa a
atmosfera sem maiores problemas e atinge o solo.

34
FIGURA 2.4 – Espectro eletromagnético, exibindo a transparência relativa da ionosfera e atmosfera terrestre. FONTE: Adaptada de Kraus (1986, p. 29).
A radiação eletromagnética que consegue chegar ao solo pode ser detectada e estudada
através de instrumentos operando numa banda de freqüências dentro da respectiva
“janela” de observação. Por exemplo, o instrumento BSS opera dentro da faixa de 1000-
2500 MHz, dentro da banda de ondas de rádio, para a investigação de fenômenos
solares.
Entretanto, mesmo a radiação dentro dessas bandas não está livre de perturbações que
podem prejudicar os dados coletados e utilizados nas pesquisas científicas de fontes de
origem cósmica. A presença de sinais de interferência que podem prejudicar os dados é
um problema complexo e cada vez mais perturbador na atualidade. Este aspecto
fundamental das pesquisas científicas dentro da banda de ondas de rádio é abordado nas
seções seguintes.
2.3 O Problema da Interferência em Radiofreqüências
Assim como a astronomia ótica se depara com sérios problemas com a poluição
luminosa, a radioastronomia enfrenta desafios similares, com seu próprio tipo de
poluição luminosa: as interferências em radiofreqüências - IRF (Barnbaum e Bradley,
1998).
35
Cada vez mais as observações rádio-astronômicas são prejudicadas por sinais de IRF
provindos de fontes artificiais como serviços de telecomunicações, sinais de satélites de
navegação, etc (van der Veen et al, 2000). É importante diferenciar estes sinais de
interferência em rádiofreqüências (todos aqueles que não são provenientes de fontes de
interesse astronômico ou astrofísico) dos sinais de fontes astrofísicas. Entre as fontes de
interesse astrofísico podemos citar: o Sol, estrelas em geral, planetas, objetos quasi-
estelares (quasares), nebulosas, centro galáctico, galáxias, nuvens de gás e poeira,
nuvens moleculares, etc. As interferências em radiofreqüências podem ser geradas
tanto internamente (dentro do próprio radiotelescópio, por equipamentos que compõe o
mesmo) quanto externamente, por sinais artificiais devido às atividades humanas na
Terra ou espaço (Goris, 1998).
2.4 Interferência em Radiofreqüências Interna
A Interferência em Radiofreqüências Interna (IRFI) é gerada pelos equipamentos
elétricos que compõem o próprio radiotelescópio como, por exemplo, equipamentos de
controle e de processamento dos sinais, tais como os computadores, redes de
computadores e correlacionadores (equipamento responsável pela correlação - de uma
forma simples, multiplicação e integração - dos sinais de cada par de antenas de um
interferômetro).
Este tipo de interferência se apresenta na forma de sinais monocromáticos, nas
freqüências fundamentais e nas harmônicas dos vários sinais de clock do equipamento
digital. Um exemplo deste tipo de interferência são os sinais nas harmônicas de 10MHz
e 100MHz, causados pelos equipamentos de rede tipo Ethernet. A maior parte desta
componente interna pode ser eliminada colocando-se estes equipamentos dentro de uma
"gaiola de Faraday" para promover sua blindagem eletromagnética (Goris, 1998).
2.5 Interferência em Radiofreqüências Externa
A Interferência em Radiofreqüências Externa (IRFE) pode ser proveniente de fontes
naturais ou artificiais, sendo suas fontes naturais mais comuns os relâmpagos. As fontes
artificiais de IRF dividem-se em não intencionais, tais como ruído elétrico de motores

36
de carros, fornos de microondas ou instalações elétricas, e as intencionais, como por
exemplo sistemas de comunicações, RADAR e radiodifusão comercial em AM e FM
(Goris, 1998).
A cada ano, um número crescente de novos empreendimentos comerciais e militares
utiliza mais espaço nas bandas de VHF, UHF e microondas. Todos estes serviços têm
potencial para interferir nas observações em radioastronomia e, de fato, já causam
problemas para a radioastronomia mesmo em sítios remotos de observação. O potencial
para esta forma de poluição cresce de maneira alarmante (Barnbaum e Bradley, 1998).
Como exemplos destes tipos de serviços, podemos citar: sinais de satélites artificiais,
espaçonaves, transmissores de estações de rádio e TV, telefonia móvel, sistemas de
navegação (GPS), sistemas de comunicação via rádio, internet via rádio, TV a cabo,
redes digitais, radar e sensoriamento remoto.
Esta componente externa (IRFE) pode penetrar no radiotelescópio através de suas
antenas e através do sistema analógico, tal como o sistema de front end – parte de um
receptor de rádio que trabalha com altas freqüências antes dos estágios de conversão
para os sinais de freqüência intermediaria (FI) - e os subsistemas de freqüência
intermediária (sistema responsável por converter os sinais de alta freqüência para uma
freqüência mais baixa, que será detectada, amplificada e registrada na saída do receptor,
correspondendo ao sinal da fonte observada). Devido ao alto ganho das antenas de
radiotelescópios e do fato que os sinais dos corpos celestes geralmente são mais fracos
em comparação com os sinais de IRF, o principal meio de penetração destes sinais de
interferência são as antenas, tanto pelo lóbulo primário quanto pelos lóbulos laterais.
Para evitar a IRFE há necessidade de legislação específica que proteja a banda de
interesse astrofísico ou de técnicas que cancelem ou minimizem estes sinais a níveis
aceitáveis para as necessidades científicas. A despeito da legislação, que em princípio
protege as bandas de rádio de interesse astrofísico, estas bandas são bem restritas. Além
disso, ultimamente a banda L (1-2 GHz) tem sido muito ocupada por sinais de IRFE,
como por exemplo, telefonia móvel e internet via rádio, do ponto de vista astrofísico.
Estes sinais são poluidores e causam grande perturbação nos sinais observados de fontes
astrofísicas. O estabelecimento de nova legislação para proteger esta banda entra em

37
choque com interesses comerciais, portanto o estabelecimento de nova legislação para
proteção de outras bandas de interesse astrofísico é um processo árduo que pode
consumir vários anos. Uma forma de minimizar os efeitos de sinais de radiofreqüência
indesejados, que constituem interferência para os instrumentos radioastronômicos é a
aplicação de técnicas e/ou métodos que cancelem, ou pelo menos minimizem, tais sinais
nas bandas de observação desejadas.
2.6 Sinais IRF na Banda de Ondas de Rádio Decimétricas
O BSS localiza-se em uma zona urbana, estando com isto sujeito às mais diversas fontes
de IRFE, como por exemplo sinais de uma torre de telefonia móvel localizada a menos
de 200m de distância, que foi instalada a cerca de 3 anos. A disseminação cada vez
maior de serviços de telefonia móvel e internet via rádio força os pesquisadores a adotar
procedimentos para tratar a interferência destes sinais. Entre os procedimentos adotados
tem-se a instalação de filtros para determinadas faixas de freqüências onde a
interferência é conhecida, ou o aumento da faixa de freqüência de observações, para
fugir das faixas contaminadas com IRFE. Como agravante tem-se o fato de que muitos
serviços (tais como a telefonia móvel) são intermitentes, tornando difícil prever quando
ou como este tipo de interferência afetará os dados observacionais e, mais difícil ainda,
tomar medidas preventivas para evitá-los. A Figura 2.5 exemplifica a contaminação por
IRFE, exibindo um espectro dinâmico (1000 -2000MHz) das 16:02:30 às 16:07:50 UT
de 5 de julho de 2002. Neste espectro, pode ser observada na região (a) uma linha (cor
preta) de IRF que se estende por todo o arquivo, e na região (b) um evento solar
registrado neste espectro.

38
FIGURA 2.5 – Exemplo de espectro dinâmico corrompido por sinal de IRFE coletado
pelo BSS.
Esta linha de IRF é única, e se situa no canal de freqüências 79, referente à freqüência
de 1.790 MHz.. Os arquivos apresentam linhas de IRF quase sempre sobrepondo-se aos
eventos solares registrados, prejudicando a análise dos mesmos. Como pode ser visto no
espectro da FIGURA 2.5 (“Spectral profile”) a intensidade da linha de IRF é muito
superior à dos outros canais. Daí a necessidade de uma técnica que consiga eliminar ou
minimizar as linhas de IRF sem prejudicar os dados observados. A Figura 1.3, vista no
Capítulo anterior, exibe um excerto da carta da “Atribuição de faixas de freqüência no
Brasil”, conforme a Anatel (Agencia Nacional e Telecomunicações), onde pode ser
observada a faixa coberta pelo BSS (1000 a 2500 MHz) e percebe-se a grande
quantidade de fontes externas que podem interferir diretamente na recepção do
instrumento. A freqüência da linha de IRF observada na FIGURA 2.5 (1.790 MHz) está
em uma zona identificada como sendo ocupada por telefonia fixa e/ou móvel, que
provavelmente é a causadora desta interferência.

39
Deve ser ressaltado que de 1999 a 2002 o BSS registrou regularmente o espectro
dinâmico de fenômenos solares explosivos dentro da banda de freqüências de 1000-
2500 MHz. A maioria dos dados foram coletados contendo uma linha de interferência
dentro da banda de observações. Entretanto, no final de 2001 e início de 2002, a
quantidade de linhas de interferência dentro da banda começou a aumentar
significativamente. Isto exigiu a tomada de medidas preventivas com a instalação de
filtros analógicos na entrada do receptor do instrumento que eliminaram aquelas linhas
de interferência. Além disso, a adoção de medidas que cancelassem-minimizassem a
linha de interferência nos espectros dinâmicos já coletados dentro do período de 1999 a
2001 é de fundamental importância para o bom andamento das pesquisas científicas que
fazem uso dos dados do BSS.
Por este motivo foi proposto este trabalho, o desenvolvimento de um filtro adaptável,
baseado em técnicas de redes neurais, que permita reduzir ou cancelar os sinais de
interferência dos dados coletados pelo BSS entre 1999 e 2002.
No próximo Capítulo, é feita uma descrição sobre redes neurais artificiais, sua utilização
e funcionamento, e também sobre o método de filtragem adaptável proposto neste
trabalho a fim de tratar os sinais de IRF que afetaram os dados do instrumento BSS
entre 1999 e 2002.

40

41
CAPÍTULO 3
REDES NEURAIS ARTIFICIAIS
Neste Capítulo as redes neurais artificiais são abordadas e propostas como uma solução
para o cancelamento ou minimização dos sinais de IRF. É apresentada uma breve
introdução sobre redes neurais, com foco na utilização das mesmas na concepção de
filtros adaptáveis.
3.1 Introdução
A origem das redes neurais está fortemente vinculada aos estudos do cérebro e do
sistema nervoso, porém elas têm sido continuamente desenvolvidas e aperfeiçoadas para
uso na solução dos mais diversos tipos de problemas práticos, sendo que um dos
primeiros trabalhos bem sucedidos na utilização de redes neurais com a finalidade de
cancelar ou eliminar ruídos em sinais foi o trabalho de Bernard Widrow et al (1975).
O início das pesquisas em redes neurais artificiais se deu na década de 1940, com o
trabalho de Warren McCulloch e Walter Pitts, que propuseram um modelo
computacional para um neurônio biológico. Com este trabalho, eles mostraram que
redes de neurônios artificiais poderiam, em princípio, executar qualquer operação lógica
ou aritmética. Este trabalho é comumente citado como a origem do campo das redes
neurais artificiais (Hagan, Demuth e Beale, 1996).
Donald Hebb avançou o desenvolvimento da área de redes neurais artificiais, propondo
em 1949 um modelo para explicar a aprendizagem em neurônios biológicos. Mas foi
apenas com o trabalho de Rosenblatt e seu Perceptron que surgiu a primeira aplicação
prática de uma rede neural artificial (Hagan, Demuth e Beale, 1996).
O campo das redes neurais artificiais está fortemente vinculado ao modelo biológico de
neurônio, sendo que grande parte dos modelos matemáticos utilizados imitam as
estruturas encontradas no cérebro. Porém, algumas arquiteturas de redes têm pouca
relação com o cérebro, e algumas nem têm contrapartidas biológicas correspondentes
(Paraskeva, 2003).

42
3.2 O Perceptron
Na década de 50 Frank Rosenblatt e outros pesquisadores desenvolveram uma classe de
redes neurais chamada de Perceptrons, cujos neurônios são muito similares aos
neurônios originalmente propostos por McCulloch e Pitts. A diferença fundamental no
trabalho de Rosenblatt foi o desenvolvimento de uma estratégia de aprendizagem para
treinar redes Perceptron, a fim de que as mesmas pudessem resolver problemas de
reconhecimento de padrões, problema prático no qual Rosenblatt trabalhava àquela
época (Hagan, Demuth e Beale, 1996). Na Figura 3.1 é exibido o esquema de um
Perceptron que foi concebido com um mecanismo para classificação de classes
linearmente separáveis (Haykin, 2001).
1x
2x
3x
px
M
1kw
2kw
3kw
kpw
Limiarkθ
∑
Saídaky
( )⋅ϕ Limitação de Função
⎪⎪⎪⎪⎪⎪
⎩
⎪⎪⎪⎪⎪⎪
⎨
⎧
Entradas
FIGURA 3.1 – Esquema de um Perceptron . FONTE: Adaptada de Haykin (2001, p. 107).
Na Figura 3.1, o Perceptron consiste de um neurônio com várias entradas, uma saída e
um sinal limiar. As entradas são representadas por 1, , px xL e seus respectivos pesos
como 1, , pw wL . O funcionamento pode ser dividido em duas fases distintas:
• Inicialmente é realizada uma combinação linear dos valores das entradas, ou
seja, a soma das multiplicações dos valores de entrada ( 1, , px xL ) pelos pesos
correspondentes a cada entrada ( 1, , pw wL ). O resultado desta combinação
linear, acrescido do valor de um limiar (bias, cuja função é aumentar ou

43
diminuir a sensibilidade do neurônio e seu conseqüente disparo) kθ , é
denominado campo induzido do neurônio ( v ) ou atividade interna:
1 1 2 2 p p kv x w x w x w θ= + + + +L .
• Em seguida, em função desta atividade interna, o neurônio é disparado ou não.
O mecanismo de disparo é efetuado aplicando-se uma função de ativação ( )vϕ
(função sinal) que limita o valor de saída do neurônio (aqui representada por
ky ) ao conjunto {-1,1}, resultando na saída do Perceptron:
( )1 1 2 2k p py x w x w x wϕ= + + +L .
Através destes procedimentos, o Perceptron é capaz de resolver problemas linearmente
separáveis. A Figura 3.2 ilustra o tipo de função de ativação do neurônio de
Rosemblatt.
FIGURA 3.2 – Tipo de função de ativação do neurônio de Rosemplatt. FONTE: Adaptada de Hagan, Demuth e Beale (1996, p. 4-5)

44
3.3 Rede ADALINE
Em 1960, Bernard Widrow e sua estudante Marcian Hoff introduziram o Adaptive
Linear Neuron (ADALINE) - (Elemento Linear Adaptável) e o algoritmo de
aprendizagem conhecido por Least Mean Square (Hagan, Demuth e Beale, 1996).
Assim como o Perceptron, a ADALINE pode resolver apenas problemas linearmente
separáveis. Mesmo assim, o algoritmo LMS tem características muito atraentes (que
serão vistas adiante), que fizeram com que este tipo de rede neural artificial fosse uma
das redes mais utilizadas em aplicações práticas (Stewart, Harteneck e Weiss, 2000). A
Figura 3.3 exibe a arquitetura de uma rede ADALINE.
1 x
2 x
3 x
p x
M
1 k w
2 k w
3 k w
kp w
Limiar k θ
∑ 1
Saídaky
( ) ⋅ ϕ Limitação de Função
+ Erroe
Desejada Resposta d
∑ 2
FIGURA 3.3 – Arquitetura de uma rede ADALINE. FONTE: Adaptada de Haykin (1991, p. 134).
O funcionamento de uma rede ADALINE é muito similar ao funcionamento de um
Perceptron, porém enquanto este último utiliza uma função de ativação do tipo sinal,
restrita ao conjunto {-1,1}, uma ADALINE apresenta uma função de ativação tipo
linear, podendo exibir em sua saída quaisquer valores dependendo de sua atividade
interna. Outra diferença entre um Perceptron e uma ADALINE é a inclusão do
algoritmo LMS, responsável pela estratégia de atualização dos pesos do neurônio
( 1, , pw wL ). Este algoritmo utiliza no seu funcionamento um sinal de erro (e), gerado

45
pelo comparador 2∑ , sendo este sinal de erro nada mais do que a diferença entre a
resposta do neurônio e a resposta desejada (d).
3.3.1 Algoritmo LMS
O algoritmo de aprendizagem LMS, também conhecido como regra delta de Widrow, é
um algoritmo de minimização de erro, baseado em estimativas instantâneas do erro na
saída. Ele faz parte da família de algoritmos de gradiente estocástico (Haykin, 1991).
Basicamente, ele percorre a superfície de erro da função em busca do ponto de erro
mínimo.
Uma das maiores vantagens do algoritmo LMS é sua simplicidade computacional. Além
disso, ele apresenta uma solução independente de modelo que o torna robusto (Haykin,
2001).
Por se tratar de um algoritmo essencial para o desenvolvimento desta dissertação, os
passos do algoritmo LMS, para um único neurônio, são apresentados a seguir, em uma
notação matricial. Toma-se instantes de tempo discretos que são denotados pelo índice
k, nos quais o vetor de pesos é ( )W kr
e o limiar do neurônio é )(kb . O vetor de entrada
do neurônio é ( )Tp kr e a taxa de aprendizagem do neurônio é α (k). O erro no instante
k é denotado por )(ke e é calculado levando em conta o vetor de saída desejada )(kd e
a saída correspondente do neurônio )(ky .
1) Inicialmente, ajustam-se os pesos do neurônio e o valor do limiar em zero:
( )( )1 0
1 0
W
b
=
=
rr
2) Em seguida, calculam-se os valores de saída do neurônio, bem como o erro
obtido:

46
( ) ( ) ( ) ( )( ) ( ) ( )
Ty k W k p k b k
e k d k y k
= +
= −
rr r
rr r
3) No último passo, novos valores dos pesos e do limiar são calculados e
atualizados:
( ) ( ) ( ) ( )( ) ( ) ( )kekbkb
kpkekWkW T
rrr
rrrr
α
α
21
21
+=+
+=+
4) Os passos (2) e (3) são repetidos até que todo o vetor de entrada tenha sido
processado.
5) Verifica-se o desempenho geral da aprendizagem (através de algum índice, tal
como o erro quadrático médio) para parar ou continuar o treinamento.
Uma descrição mais minuciosa bem como as deduções matemáticas deste
procedimento, além da demonstração do teorema de convergência do perceptron,
podem ser vistos em podem Haykin (2001) e em Hagan, Demuth e Beale (1996).
Convém ainda notar que o maior problema do algoritmo LMS é a taxa de convergência
lenta (Haykin, 2001). A fim de aperfeiçoar este algoritmo diversas variantes foram
propostas, sendo quatro destas variações comparadas com o algoritmo LMS clássico em
Woon-Seng (1996). Duas outras variantes são o algoritmoRecursive Least-Squares
(Haykin, 1991) e o algoritmo LMS adjunto (Wan, 1996).
3.3.2 Linha de Atrasos e Filtro Adaptável
A fim de que uma rede ADALINE possa extrair informação no domínio temporal do
sinal, surge a necessidade de um elemento adicional: uma linha de atrasos - tapped
delay line (Widrow e Stearns, 1985). Com este elemento, o sinal digital sofre sucessivos
atrasos temporais, sendo cada um destes atrasos denominado um tap (Demuth e Beale,
2003). Na prática, a linha de atrasos consiste em um vetor, com tamanho igual ao
número de taps, no qual os elementos do sinal de entrada são deslizados

47
seqüencialmente, um a um, durante os passos de execução da rede ADALINE. A Figura
3.4 mostra uma linha de atrasos conectada à entrada de uma ADALINE.
⎪ ⎪ ⎪ ⎪ ⎪ ⎪
⎩
⎪ ⎪ ⎪ ⎪ ⎪ ⎪
⎨
⎧
Entradas
1x
2x
3x
nx
M
1kw
2kw
3kw
knw
Limiarkθ
∑ 1
Saída k y
( ) ⋅ ϕ Limitação de Função
+ Erro e
Desejada Resposta d
∑ 2
( ) pk
( ) 1 pk −
( ) 2 pk −
( ) pkn −
M M
Linha de Atrasos
FIGURA 3.4 – Linha de atrasos conectada a uma rede ADALINE. FONTE: Modificada de Demuth e Beale (2003, p. 10-9).
O arranjo de uma rede ADALINE mais uma linha de atrasos, forma um filtro adaptável,
sendo este arranjo também referido no campo de processamento digital de sinais como
um filtro de resposta impulsiva finita – FIR (Widrow e Stearns, 1985; Demuth e Beale,
2003). Este filtro tem muitas aplicações práticas, sendo amplamente utilizado em
processamento digital de sinais, em especial em filtragem adaptável. Basicamente, o
conjunto ADALINE + Linha de Atrasos pode ser utilizado em diversas aplicações
(Tsoukalas e Uhrig, 1997; MathWorks, 2003; Vorobyov, Cichocki e Bodyanskiy,
2001), sendo as mais comuns:
1) Identificação ou modelagem de sistemas (controle adaptável).
2) Modelagem inversa (equalização e deconvolução).
3) Predição adaptável.
4) Cancelamento de interferência adaptável.

48
Destes arranjos, somente o item 4 (cancelamento de interferência adaptável) é
examinado em profundidade nesta dissertação.
Quando a natureza da interferência (ruído) é desconhecida e mutável, utiliza-se o
esquema de cancelamento de interferência adaptável. A vantagem deste esquema em
relação à filtragem clássica, é que no cancelamento adaptável a atenuação do sinal é
minimizada, podendo ser nula, o que pode produzir uma relação sinal-ruído muito
maior, em virtualmente qualquer condição (Tsoukalas e Uhrig, 1997).
Um esquema de filtro adaptável, utilizado em cancelamento de ruídos (Hagan et al,
1996), pode ser visto na Figura 3.5. Neste sistema, um filtro adaptável tenta remover a
Ruído Contaminante (c) que é adicionada ao Sinal (s). Note-se que o sistema não tem
acesso direto ao Ruído Contaminante, mas sim ao Ruído Original (r). O filtro adaptável
realiza um ajuste de escala e fase para tentar relacionar o Ruído Original com o Ruído
Contaminante. A diferença entre este sinal relacionado (f) e o Sinal Contaminado (m)
gera um sinal de Erro (e), que é o Sinal restaurado.
FIGURA 3.5 – Sistema adaptável de cancelamento de ruído. FONTE: Modificada de Hagan et al. (1996, p. 10-15).

49
O cancelamento de interferências utilizando filtros adaptáveis teve seu primeiro trabalho
expressivo com o trabalho de Widrow de 1975 (Widrow e Stearns, 1985). Este trabalho
foi e continua sendo uma importante referência no campo de processamento digital de
sinais. Nele são descritas diversas aplicações práticas de filtragem adaptável. Na Figura
3.6 podem ser vistos sinais fornecidos de um eletrocardiograma tratado por um filtro
adaptável. Na Figura 3.6 c) tem-se o resultado da filtragem, exibindo a atenuação da
interferência.
FIGURA 3.6 – Filtro adaptável utilizado na eliminação de ruído em eletrocardiograma: (a) entrada contaminada, (b) interferência referência, (c) resultado final. FONTE: Adaptada de Widrow, (1975, p. 1702).
3.4 Perceptrons de Múltiplas Camadas e Algoritmo de Retropropagação
Os Perceptrons de Rosenblatt, quando agrupados, originam a arquitetura de rede neural
chamada Perceptrons em múltiplas camadas. Tipicamente, esta rede é formada por um
conjunto de unidades sensoriais, chamado de camada de entrada, uma ou mais camadas
ocultas de neurônios e uma camada de neurônios de saída (Haykin, 2001). Como
diferença do Perceptron de Rosenblatt tem-se que neste tipo de rede a função de
ativação dos neurônios é não-linear, monotonicamente crescente e derivável. Em geral,

50
as funções em forma de ‘S’ (sigmoidal), como a função logística ( ) ( )1
1 expv
avϕ =
+ e a
função tangente hiperbólica ( ) ( )tanhv a bvϕ = , sendo a e b constantes maiores que
zero, são as mais utilizadas. Um exemplo deste tipo de arquitetura de rede neural pode
ser visto na Figura 3.7:
⎪⎪⎪⎪⎪⎪
⎩
⎪⎪⎪⎪⎪⎪
⎨
⎧
Entradas
Saída
4444 84444 76
Neurônios de Camadas 3
FIGURA 3.7 – Diagrama de uma rede de Perceptrons de múltiplas camadas.
Porém, embora esta arquitetura de rede tenha sido proposta por Rosenblatt e Widrow
como forma de transpor a grande limitação dos Perceptrons (a impossibilidade dos
mesmos de resolver problemas não-lineares), eles não conseguiram generalizar o
algoritmo LMS para múltiplas camadas. Foi apenas em meados da década de 80, que o
algoritmo de retropropagação do erro foi proposto independentemente por David
Rumelhart, Geofrey Hinton e Ronald Williams, David Parker, e Yann Le Cun (Hagan,
Demuth e Beale, 1996).
Assim, a união da rede de Perceptrons de múltiplas camadas com o algoritmo de
retropropagação do erro, permitiu a solução de problemas não-lineares, tornando-se
assim uma das arquiteturas de redes neurais mais utilizadas atualmente (Hagan, Demuth
e Beale, 1996; Haykin, 2001). Uma análise detalhada do algoritmo de retropropagação
do erro pode ser encontrada em Haykin (2001).

51
Klimasauskas (1989) utilizou com sucesso uma rede de retropropagação de erro na
eliminação de ruídos ambiente que contaminavam sinais de eletrocardiogramas (tal
como o trabalho original de Widrow, que utilizava filtros adaptáveis com a mesma
finalidade). A técnica de Klimasauskas consiste na compressão dos dados de
eletrocardiogramas através de uma rede de retropropagação com camada oculta. Em
seguida, uma restauração destes dados fornecia uma saída com nível menor de ruído. O
resultado pode ser visto na Figura 3.8, onde na parte inferior da figura tem-se o sinal
original degradado por ruído, e na parte superior da figura a saída filtrada pela rede
neural, praticamente livre de ruído:
FIGURA 3.8 – Exemplo de eliminação de ruídos utilizando rede de retropropagação. FONTE: Modificada de Klimasauskas (1989, p. 44).
Além das arquiteturas de redes vistas acima, existem ainda as Redes de Função de Base
Radial (RBF, mais detalhes em Haykin, 2001), que têm se mostrado eficazes em
cancelamento de ruídos, principalmente de natureza não-linear (Cichocki, Vorobyov e
Rutkowski, 1999; Vorobyov e Cichocki, 2001), e técnicas mistas, baseadas em redes
neurais artificiais em conjunto com lógica nebulosa e algoritmos genéticos (Russo,
1999; Meng Joo e Aung Min, 2002). Mais detalhes sobre as arquiteturas de redes

52
neurais e outras técnicas de inteligência computacional podem ser vistos em Haykin
(2001); Hagan, Demuth e Beale (1996); e Tsoukalas e Uhrig (1997).
Dentre todas estas arquiteturas de redes neurais apresentadas, que possivelmente
poderiam solucionar o problema de interferências em radiofreqüências do BSS, foi
escolhida a utilização da técnica de filtragem adaptável. Os aspectos mais relevantes
nesta escolha foram a simplicidade de implementação e a velocidade de processamento,
devido à grande quantidade de dados existente.
Assim sendo, o Capítulo seguinte aborda detalhes práticos da técnica da filtragem
adaptável, tais como as entradas e saída do filtro e a escolha ideal dos parâmetros do
mesmo, além de serem apresentados alguns exemplos de problemas que podem ser
solucionados com a utilização da filtragem adaptável.

53
CAPÍTULO 4
ASPECTOS PRÁTICOS DO FILTRO ADAPTÁVEL
No Capítulo anterior as redes neurais artificiais foram apresentadas como uma solução
para o cancelamento de interferências em radiofreqüências. O presente Capítulo detalha
aspectos práticos do filtro adaptável que foi criado, suas entradas e saída, escolhas dos
parâmetros de funcionamento ideais, explicações sobre os diversos elementos do filtro,
e finaliza com a apresentação de alguns exemplos ilustrativos de utilização de filtros
adaptáveis. O enfoque aqui apresentado é na utilização do filtro adaptável no
cancelamento de sinais de interferência.
4.1 Filtro Adaptável
Nesta dissertação, o problema da interferência nos dados adquiridos pelo instrumento
BSS é tratado pela aplicação de filtros adaptáveis, que foram utilizados com sucesso na
eliminação de interferências em radiofreqüências na área de radioastronomia. Mitchell e
Bower (2001) obtiveram uma redução de perto de 36 dB no sinal de IRF, quando
aplicaram a técnica de filtragem adaptável nos sinais do Protótipo do Arranjo Ágil
(Rapid Prototyping Array – RPA, protótipo de um instrumento que está sendo
construído junto ao Departamento de Radioastronomia da Universidade da Califórnia).
Nos experimentos foi utilizada uma antena de referência para adquirir os sinais de IRF e
antenas primárias responsáveis pela aquisição dos sinais desejados, em um filtro
ADALINE com neurônio único, um canal de limiar e algoritmo de aprendizagem LMS.
Barnbaum e Bradley (1998) construíram o protótipo de um cancelador adaptável,
consistindo de dois receptores: um canal primário (vindo do feixe principal de um
radiotelescópio) e um canal separado de referência. O canal primário recebe o sinal
astronômico desejado, corrompido por IRF, enquanto o canal de referência recebe
apenas a IRF. Os dois canais são submetidos a um filtro adaptável digital, utilizando um
algoritmo LMS. Foram obtidos resultados com atenuação nas interferências da ordem
de 72 dB.

54
Assim sendo, para o cancelamento ou redução dos efeitos de IRF nos dados do
equipamento BSS, foi proposta inicialmente a utilização de uma rede ADALINE
simples, com o algoritmo de aprendizagem LMS clássico.
Um agravante nesta abordagem é o fato do instrumento BSS possuir apenas uma antena,
não possibilitando a utilização direta do sinal de interferência como referência para a
filtragem adaptável. A solução encontrada será abordada nos Capítulos subseqüentes.
As entradas e saída do filtro são referidos daqui em diante como “sinais”.
O funcionamento do filtro adaptável requer o ajuste de três parâmetros: o valor da taxa
de aprendizagem (α), o número de taps e os valores dos pesos e limiar iniciais. Estes
elementos são apresentados e explicados nos tópicos subseqüentes.
4.2 Entradas para o Filtro Adaptável
A filtragem adaptável é um método de filtragem ótima que pode ser aplicado sempre
que um sinal de interferência estiver disponível, tendo como principais vantagens a
baixa distorção do sinal original e sua capacidade de adaptação (Widrow e Stearns,
1985). A Figura 4.1 ilustra a contaminação de um sinal puro (a) qualquer por um sinal
de interferência (b), resultando no sinal contaminado (c). O objetivo da filtragem
adaptável é restaurar o sinal contaminado à sua forma original através do cancelamento
desta interferência.
Via de regra, o sinal de interferência real é desconhecido (caso contrário, uma simples
subtração do sinal contaminado pela interferência real restauraria completamente o sinal
puro original), mas se tem acesso a um sinal de interferência (d) que, apesar de não ser
idêntico à interferência real, é altamente correlacionado à interferência real. Em geral
este sinal de interferência possui algumas distorções, tais como defasagem temporal,
intensidade diferente ou mesmo um desvio de offset (defasagem), em relação à
interferência real.

55
(b) Interferëncia Real
+ =(a) Sinal Puro (c) Sinal Contaminado
(Sinal de Entrada)
(d) Sinal de Interferëncia
FIGURA 4.1 – Esquema dos sinais envolvidos em um procedimento de filtragem adaptável.
Portanto, os dois sinais disponíveis alimentam o filtro adaptável (e) (conforme pode ser
observado na Figura 4.2): um sinal de entrada contaminado (c) e o sinal de interferência
(d). Durante o funcionamento, o filtro adaptável modifica seus pesos e limiar, ajustando
o sinal de interferência de forma que o mesmo se aproxime do sinal de interferência real
tomado como referência. Subtraindo-se este resultado do sinal de entrada, elimina-se a
interferência. Logo, no final do processo tem-se um sinal de saída (f) restaurado e livre
de interferências.
(c) Sinal de Entrada(contaminado)
(d) Sinal de Interferência
(f) Sinal de Saída(livre de interferências)
(e) Filtro Adaptável
FIGURA 4.2 – Entradas e saída típicas de um filtro adaptável.
Convém notar que em algumas situações o sinal de interferência pode apresentar
componentes de baixa intensidade do sinal de entrada. Neste caso pode ocorrer o
cancelamento de parte do sinal de entrada, resultando em perda da eficiência do filtro
adaptável (Widrow e Stearns, 1985).

56
4.3 Taxa de Aprendizagem (Parâmetro α)
A taxa de aprendizagem está relacionada diretamente com a velocidade com que os
pesos e o limiar do filtro adaptável convergem para valores estáveis. A escolha do valor
ideal deste parâmetro depende de diversos fatores, entre os quais podemos citar
(Haykin, 1991):
• erro residual;
• estabilidade;
• sensibilidade a transientes;
• número de taps;
• tempo de convergência;
• capacidade de readaptação.
Estes fatores precisam ser cuidadosamente levados em conta na hora da escolha da taxa
de aprendizagem de um filtro adaptável, para que este possa convergir rapidamente.
Estes fatores são detalhados e exemplificados a seguir.
Erro residual: após a fase de convergência, os pesos e o limiar de um filtro adaptável
continuam variando estocasticamente nas imediações do “ponto ótimo” (ponto para o
qual os valores dos pesos e limiar convergem assintoticamente). Isto gera um pequeno
erro residual, que pode ser visto no perfil temporal da FIGURA 4.3, que exibe o
comportamento de uma rede ADALINE com apenas um único peso (W0) e o limiar
(B). Na Figura 4.3 pode ser visto que, embora os valores de W0 e B tenham convergido
para os valores “ótimos”, eles continuam oscilando em torno dos mesmos. Assim, via de
regra, quanto maior o valor de α maior este erro residual indesejável (Haykin, 1991).
Em geral, quanto menor for o valor de α, menor será o erro residual.

57
FIGURA 4.3 – Variação estocástica do peso e do limiar em torno do “ponto ótimo”.
Estabilidade: o filtro adaptável em geral é estável e converge para a solução ótima do
problema. Porém, esta estabilidade depende fundamentalmente do parâmetro α. Valores
de α muito grandes podem tornar o filtro instável e causar divergência, fazendo os
valores dos pesos, do limiar e a saída do filtro tenderem ao infinito, conforme pode ser
observado na Figura 4.4:

58
FIGURA 4.4 – Parâmetro α muito grande, gerando instabilidade e divergência no peso e no limiar.
Para uma escolha segura do parâmetro α existem cálculos matemáticos baseados
principalmente no estudo dos sinais de entrada do filtro adaptável (Haykin, 1991;
Butterweck, 1997). Na prática, porém, este estudo nem sempre é possível, pois
dificilmente se conhecem os sinais de entrada a priori. Assim, normalmente a escolha
de um valor seguro para α é realizada empiricamente, testando diferentes valores até
encontrar aqueles que não causem divergência no filtro e, em seguida, escolhe-se um
valor um pouco menor, como margem de segurança (Hagan, Demuth e Beale, 1996). A
estabilidade, em geral, melhora quando a taxa de aprendizagem, α, torna-se menor.
Sensibilidade a Transientes: diretamente relacionada com a estabilidade do filtro
adaptável, a sensibilidade a transientes diz respeito à capacidade do filtro adaptável em
suportar transientes nos sinais de entrada. Existem certas situações onde um filtro
adaptável pode parecer estável com sinais de entrada bem comportados, mas acabar
divergindo na presença de um transiente forte, tal como ilustram os perfis temporais da
Figura 4.5. Deste modo, um valor de α menor faz com que o filtro fique menos sensível
a estes transientes.

59
FIGURA 4.5 – Transiente no sinal de entrada (esquerda) causando instabilidade nos
pesos do filtro adaptável (direita).
Número de taps: deve ser levado em consideração na escolha do parâmetro α pois, em
geral, quanto maior o número de taps, menor deve ser o α correspondente (caso
contrário pode ocorrer instabilidade no filtro adaptável).
Tempo de Convergência: embora teoricamente um filtro adaptável estável sempre tenda
a convergir para a solução ótima, o tempo de convergência pode acabar se tornando
excessivamente grande. Em alguns casos, mesmo após o processamento de 90% do
vetor de entrada, os pesos e o limiar não convergem completamente. Este tempo de
convergência depende fundamentalmente de α, de forma que quanto maior o valor de α,
menor o tempo gasto na convergência do filtro adaptável para a solução ótima. Os perfis
temporais da Figura 4.6 ilustram esta relação, exibindo três simulações onde a única
variação é o valor do parâmetro α. Com α valendo 0.050 o filtro converge rapidamente,
enquanto que com valores menores o tempo de convergência aumenta gradativamente.

60
FIGURA 4.6 – Relação entre o valor do parâmetro α e o tempo de convergência.
Convém lembrar que, via de regra, os dados de saída gerados pelo filtro na fase de
adaptação são descartados. Assim, com vetores de entrada (sinais) de tamanho reduzido
(mil amostras ou menos), a quantidade de dados descartados pode tornar-se excessiva,
em alguns casos, fazendo com que a filtragem adaptável seja inviável.
Capacidade de Readaptação: num ambiente real provavelmente os sinais de
interferência não são estáveis e podem variar durante o tempo. Uma das qualidades do
filtro adaptável é justamente conseguir modificar-se para enfrentar estas situações
(capacidade conhecida como “tracking”, Haykin, 2003), já que cada mudança no
comportamento dos sinais de interferência leva a uma nova readaptação nos pesos do
filtro. O tempo necessário para esta readaptação nos valores dos pesos do filtro depende

61
diretamente de α, sendo tanto menor quanto maior for o valor de α. A Figura 4.7 exibe
um perfil temporal com o desenvolvimento dos pesos e limiar de um filtro adaptável
durante um teste, e exemplifica um caso onde os mesmos passam por uma readaptação
(aproximadamente na varredura 675), devido a mudança na natureza da interferência.
Após um pequeno transiente os novos valores dos pesos e limiar estabilizam-se por
volta da varredura 685.
FIGURA 4.7 – Readaptação dos pesos e limiar em um filtro adaptável.
A Tabela 4.1 resume os fatores discutidos acima, que devem ser levados em conta na
determinação de um valor ideal do parâmetro α.
TABELA 4.1 – Fatores importantes na escolha da taxa de aprendizagem ideal. α menor α maior
• erro residual pequeno; • maior estabilidade; • menor sensibilidade a transientes;• maior número de taps possíveis;
• erro residual grande; • menor estabilidade; • maior sensibilidade a transientes; • menor número de taps possíveis;
• convergência lenta; • readaptação lenta.
• convergência rápida; • readaptação rápida.

62
4.4 Número de Taps
Assim como a taxa de aprendizagem, o número de taps, em um filtro adaptável, deve
ser escolhido com cuidado. Estes taps operam compensando qualquer defasagem
temporal existente entre a interferência real (que contamina os sinais de entrada) e o
sinal de interferência. A quantidade ideal destes taps depende da natureza do sinal, da
amostragem do mesmo, bem como da defasagem existente entre a interferência real e o
sinal de interferência (Tsoukalas e Uhrig, 1997). A Figura 4.8 exibe um perfil temporal,
onde pode-se observar a defasagem existente entre dois sinais (uma defasagem de 50
unidades de tempo):
FIGURA 4.8 – Defasagem entre o sinal de interferência e a interferência real.
Assim sendo, sempre deve ser escolhido um número “suficiente” de taps, de forma a
compensar as defasagens existentes. Um número maior de taps não ocasionará
problemas. Por exemplo, em uma situação onde 5 taps seriam suficientes, um filtro
adaptável com 15 taps funcionaria sem problemas. Porém, convém notar que quanto
maior o número de taps, maior será o erro residual final, já que um número maior de
pesos ficará oscilando em torno dos “pontos ótimos”, além de tornar o processo de
convergência do filtro mais lento (Pradhan e Reddy, 1999), devido à maior
complexidade e gasto de processamento computacional. Uma boa abordagem para

63
determinar o número ideal de taps é empiricamente adicionar taps um a um, até que a
rede apresente sinais de convergência.
4.5 Pesos
Os pesos de um filtro adaptável são responsáveis por eliminar qualquer diferença de
intensidade entre a interferência real (que degrada os sinais de entrada) e o sinal de
interferência que alimenta o filtro adaptável. Assim, os pesos podem atenuar o sinal de
interferência (valores menores que 1) ou mesmo amplificá-lo (valores maiores que 1).
Na Figura 4.9 superior pode ser visto um exemplo, com os perfis temporais da
interferência real e o sinal de interferência (entrada para o filtro adaptável), entre os
quais existe uma diferença de intensidade (o sinal de interferência está 1,5 vezes maior
que a interferência real). Isto força o peso do filtro adaptável a cair para 0,66666
(Figura 4.9, inferior) atenuando este sinal e compensando assim esta diferença de
intensidade .

64
FIGURA 4.9 – Influência da diferença de intensidade no sinal de interferência, no
comportamento dos pesos.
Os valores dos pesos de um filtro adaptável são ajustados dinamicamente, pelo próprio
filtro, dispensando escolhas manuais (como ocorre com o α e o número de taps). O
valor inicial dos mesmos, via de regra, de ser ajustado em zero. Porém, no Capítulo 5, é
mostrado como uma escolha cuidadosa destes valores iniciais pode levar a uma
convergência mais rápida do filtro adaptável.

65
4.6 Limiar
O limiar nem sempre é utilizado nos filtros adaptáveis, sendo dispensável quando os
sinais de entrada forem subtraídos de suas respectivas médias (Tsoukalas e Uhrig,
1997). Basicamente, a função do limiar no filtro adaptável é eliminar a diferença de
offset existente entre a interferência real (que contamina os sinais de entrada), e o sinal
de interferência que alimenta o filtro adaptável. Isto pode ser visto na Figura 4.10, à
esquerda, onde se observam os perfis temporais da interferência real e do sinal de
interferência (entrada para o filtro adaptável). Entre os dois existe uma diferença de
offset de aproximadamente 0,2 unidades. O valor do limiar converge para –0,2 unidades,
compensando assim esta diferença de offset.
FIGURA 4.10 – Influência do offset do sinal de interferência, no comportamento do
limiar.
4.7 Função de Ativação
A função de ativação de uma ADALINE, denotada por ( )vϕ , determina os possíveis
valores de saída, dependendo de sua atividade interna. Em geral, utiliza-se uma função
do tipo linear, mais comumente a função rampa. Neste trabalho foi criada uma versão
modificada do filtro, utilizando uma função de ativação não-linear do tipo sigmóide,
chamada de função logística: ( ) ( )1
1 expv
avϕ =
+, a qual limita os valores de saída da

66
ADALINE entre 0 e 1. Os gráficos destes dois tipos de funções podem ser observados
na Figura 4.11.
FIGURA 4.11 – Funções de ativação: função rampa (esquerda) e função logística (direita).
4.8 Visão Geral do Processo
A Figura 4.12 ilustra as influências dos diversos elementos do filtro adaptável no sinal
de interferência. Em (a) temos a condição inicial, com a interferência real (em azul)
juntamente com o sinal de interferência (em verde). Percebe-se que o sinal de
interferência sofre problemas de defasagem temporal, diferença de intensidade e
deslocamento de offset, em relação à interferência real. Em (b) o sinal foi processado
pelo limiar, que eliminou a diferença de offset entre os dois. Já em (c), os pesos do filtro
amplificam o sinal, eliminando assim a diferença de intensidade entre os dois sinais.
Finalmente, em (d) os taps eliminam completamente a defasagem temporal do sinal de
interferência. Neste ponto, o sinal de interferência já é virtualmente idêntico à
interferência real, bastando ao filtro apenas subtraí-la do sinal de entrada, para restaurar
completamente o mesmo.
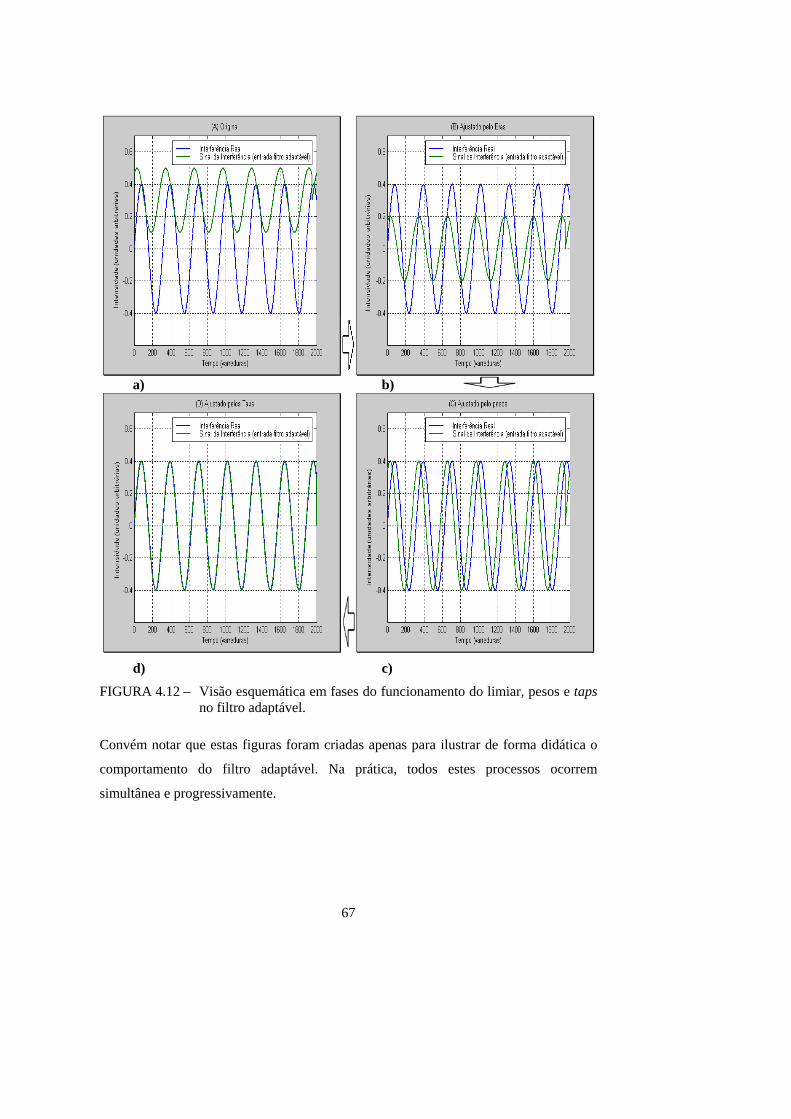
67
a) b)
d) c)
FIGURA 4.12 – Visão esquemática em fases do funcionamento do limiar, pesos e taps no filtro adaptável.
Convém notar que estas figuras foram criadas apenas para ilustrar de forma didática o
comportamento do filtro adaptável. Na prática, todos estes processos ocorrem
simultânea e progressivamente.

68
4.9 Aplicações Práticas do Filtro Adaptável
Para uma melhor compreensão sobre a aplicação dos filtros adaptáveis, são
apresentados a seguir alguns exemplos ilustrativos:
Utilização em Acústica (Widrow et al, 1975): no exemplo mostrado na Figura 4.13
temos uma situação cotidiana, onde um orador (Figura 4.13, a) discursa em uma sala,
em meio a uma platéia ruidosa (Figura 4.13, b). A voz do orador é captada pelo
microfone principal (Figura 4.13, c) mas é corrompida pela interferência acústica da
platéia (gritos, aplausos, conversas). A fim de que a voz do orador possa ser gravada ou
amplificada, sem os ruídos da platéia, pode-se utilizar um filtro adaptável, bastando para
isto a instalação de um segundo microfone (Figura 4.13, d).
(h) Sinal Filtrado
(i) Sistema de Áudio
(c) Microfone Principal
(d) Microfone Auxiliar
(b) Platéia(fonte de interferência)
(a) Orador(sinal desejado)
(f) Sinal + Interferência
(e) Somente Interferência (g) FiltroAdaptável
FIGURA 4.13 – Filtro adaptável aplicado em acústica.
FONTE: Modificada de Widrow et al.(1975, p.1704).
O microfone auxiliar (Figura 4.13, d) fica responsável pela captação do ruído sonoro
criado pela platéia, gerando o sinal de interferência (Figura 4.13, e). Este sinal, em
conjunto com o sinal de voz do orador corrompido pela ruído da platéia (Figura 4.13, f)
é aplicado em um filtro adaptável (Figura 4.13, g), o qual remove o ruído causado pela
platéia e devolve em sua saída um sinal filtrado (Figura 4.13, h) contendo apenas a voz
do orador. Este sinal filtrado pode então ser gravado ou amplificado pelo equipamento
de áudio (Figura 4.13, i).

69
Utilização em Aeronáutica (Hagan, Demuth e Beale, 1996): em cabines de aviões a jato,
onde o nível de ruído gerado pelas turbinas do avião é extremamente grande, a
comunicação entre o piloto e a torre de controle fica gravemente prejudicada. Um filtro
adaptável pode ser utilizado, cancelando o ruído proveniente das turbinas, fazendo a voz
do piloto tornar-se compreensível para os controladores de vôo, conforme o esquema
ilustrado na Figura 4.14:
(g) Sinal Corrompido
(f) Somente Interferência(i) Sinal Filtrado(h) Filtro
Adaptável
(b) Aeronave
(d) Controlador de vôo(c) Microfone
y
(e) Microfone Auxiliar
(a) Piloto
FIGURA 4.14 – Filtro adaptável utilizado em uma aplicação aeronáutica típica.
FONTE: Modificada de Hagan, Demuth e Beale (1996, p. 10-34).
Neste exemplo, um piloto (Figura 4.14, a) de uma aeronave (Figura 4.14, b) tem
dificuldades ao tentar comunicar-se, através de um microfone (Figura 4.14, c), com um
Controlador de Vôo (Figura 4.14, d) em solo, já que a voz do piloto é distorcida pelo
ruído das turbinas do avião. Através da instalação de um Microfone Auxiliar (Figura
4.14, e), instalado próximo à turbina do avião, um Sinal de Interferência (Figura 4.14,
f), contendo o ruído gerado pela turbina é adquirido. Este sinal, em conjunto com o
Sinal Corrompido (Figura 4.14, g) vindo do microfone do piloto, serve como entrada
para o Filtro Adaptável (Figura 4.14, h), que realiza a filtragem e eliminação do ruído da
turbina do avião. Em sua saída, o Sinal Filtrado (Figura 4.14, i), já livre de qualquer
ruído, é repassado para o Controlador de Vôo.
Utilização em Medicina 1 (Widrow e Stearns, 1985): um problema em medicina é a
obtenção do eletrocardiograma (ECG) de um feto em uma gestante, uma vez que os
sinais do coração da gestante são muito mais intensos que os sinais do coração do feto,
misturando-se aos sinais do feto. O arranjo da Figura 4.15 exibe um método, utilizando
filtragem adaptável, para separar os sinais de ECG da gestante dos sinais do feto.

70
(h) Sinal do Feto Filtrado(e) FiltroAdaptável
(d) Sensor Abdominal
(b) Sensor Torácico
(c) Feto
(a) Gestante
(g) Sinal dos Coraçôes da Gestante + do Feto
(f) Sinal do Coração da Gestante
(i) Terminal ECG
FIGURA 4.15 – Filtro adaptável separando os sinais de ECG de uma gestante dos sinais de ECG de um feto. FONTE: Modificada de Widrow e Stearns (1985, p. 335).
Os sinais do coração da Gestante (Figura 4.15, a) são captados por um Sensor Torácico
(Figura 4.15, b), assim como os sinais do coração do Feto (Figura 4.15, c) são captados
por um Sensor Abdominal (Figura 4.15, d). Entretanto, os sinais captados por este
último sensor são na verdade uma soma dos sinais do coração do feto superpostos aos
sinais do coração da gestante. Um Filtro Adaptável (Figura 4.15, e) recebe então estes
dois sinais: o Sinal do Coração da Gestante (Figura 4.15, f) e o Sinal Proveniente do
Feto (Figura 4.15, g) e, após o processamento do filtro adaptável, o sinal do coração da
gestante é suprimido, resultando na saída um Sinal do Feto Filtrado (Figura 4.15, h),
entregue ao Equipamento de ECG (Figura 4.15, i).
Utilização em Medicina 2 (Klimasauskas, 1989): outro problema comum em medicina
envolvendo eletrocardiogramas (ECG) é a contaminação dos mesmos pela interferência
de 60 Hz proveniente da rede elétrica. Soluções como aterramento dos equipamentos
envolvidos e a utilização de cabos com pares trançados minimizam, mas nem sempre
solucionam o problema. Uma abordagem da eliminação da interferência de 60 Hz
utilizando filtragem adaptável pode ser vista na Figura 4.16:

71
(h) Sinal de ECG Filtrado(d) FiltroAdaptável
(c) Sensor ECG
(a) Paciente
(g) Sinal de ECG corrompido por Interferência de 60 Hz
(e) Sinal de Interferência60 Hz
(i) Equipamento de ECG(f) Tomada Elétrica
(b) Interferência60 Hz
FIGURA 4.16 – Filtro adaptável eliminando interferência de 60 Hz dos sinais de ECG.
FONTE: Modificada de Klimasauskas (1989, p. 42).
Neste arranjo, os sinais do eletrocardiograma de um Paciente (Figura 4.16, a) são
contaminados por Interferência de 60 Hz (Figura 4.16, b) provenientes da rede elétrica
que penetram através do Sensor de ECG (Figura 4.16, c). Para eliminar esta
interferência, um Filtro Adaptável (Figura 4.16, d) utiliza um Sinal de Interferência
(Figura 4.16, e) de 60 Hz, obtido de uma Tomada Elétrica (Figura 4.16, f), em conjunto
com o Sinal de ECG Corrompido (Figura 4.16, g) vindo do paciente. Após o processo
de filtragem adaptável, é gerada na saída do filtro um Sinal de ECG Filtrado (Figura
4.16, h), já livre da interferência de 60 Hz, que é então enviado ao Equipamento de ECG
(Figura 4.16, i).
Utilização em Radioastronomia: neste exemplo, ilustrado na Figura 4.17, o objetivo da
Antena Principal (Figura 4.17, a) é captar sinais de rádio oriundos do Sol (Figura 4.17,
b). Porém, estes sinais são corrompidos por sinais de interferências provenientes de
diversas fontes, tais como satélites (Figura 4.17, c), relâmpagos (Figura 4.17, d) e torres
de telefonia móvel (Figura 4.17, e). Como estes sinais de interferência em geral variam
no tempo e são dificilmente previsíveis, o uso de filtros fixos em determinadas
freqüências não consegue eliminar estes sinais de interferência satisfatoriamente. Um
filtro adaptável pode ser utilizado para solucionar este problema.

72
(a) Antena Principal(e) Transmissora de Telefonia Celular
(Fonte de Interferência)
(b) Sol(Sinal Desejado)
(f) Antena Secundária
(d) Relâmpagos(Fonte de
Interferência)
(i) Equipamento Análise
(g) Sinal + Interferência
(c) Satélite(Fonte de Interferência)
(h) Somente Interferência(i) Sinal Filtrado(f) Filtro
Adaptável
FIGURA 4.17 – Filtro adaptável utilizado em radioastronomia.
Primeiramente, utiliza-se uma antena secundária (Figura 4.17, f) com a finalidade de
captar todos os sinais de interferência, menos os sinais desejados do Sol. Ela fornecerá
um sinal de interferência que não será idêntico (devido a diferenças de posicionamento
e, até mesmo, diferenças nos equipamentos que a compõem), mas muito similar aos
sinais de interferência que corrompem o sinal desejado do Sol. Em seguida, um filtro
adaptável (Figura 4.17, f) recebe estes dois sinais em sua entrada, o sinal+interferência
(Figura 4.17, g) e um sinal com apenas interferência (Figura 4.17, h), e realiza a
filtragem, utilizando este sinal com apenas interferência (Figura 4.17, h) para remover a
interferência que corrompe (Figura 4.17, g). Na saída do filtro um sinal filtrado (Figura
4.17, i) livre ou quase totalmente livre dos sinais de interferência é gerado, e em seguida
enviado a um equipamento de análise (Figura 4.17, j) ou simplesmente armazenado.
Este arranjo seria o ideal no caso do instrumento BSS. Porém o instrumento opera com
apenas uma antena, e a instalação de uma nova antena é inviável. A solução adotada
para este problema é vista no Capítulo seguinte.
Este Capítulo abordou aspectos práticos do filtro adaptável, tais como a escolha do
número ideal de taps e do valor ideal da taxa de aprendizagem. O funcionamento dos

73
diversos parâmetros do filtro adaptável foi ilustrado, e foram apresentados exemplos da
utilização do mesmo.
O próximo Capítulo descreve o material utilizado neste trabalho, detalhes sobre o
instrumento BSS e o formato de seus dados, bem como os diversos procedimentos
realizados no pré-tratamento dos dados.

74

75
CAPÍTULO 5
MATERIAL E METODOLOGIA DE TRABALHO
5.1 Introdução
Este Capítulo apresenta uma descrição sobre os dados do instrumento BSS, aborda os
procedimentos utilizados no tratamento dos dados que se referem a este trabalho e
descreve a metodologia utilizada no desenvolvimento do filtro adaptável.
De uma maneira geral, podemos descrever o processo de aplicação de filtragem
adaptável nos dados do BSS da seguinte maneira: os dados observados e adquiridos
pelo instrumento BSS são armazenados em forma de arquivos .ESP e, posteriormente,
os dados são visualizados pelo programa BSSData e BSSView (Martinon e Fernandes,
2000), permitindo a verificação dos dados e da presença de sinais de IRF. Os dados
contaminados por sinais de IRF são processados pelo filtro adaptável proposto. Com
uma nova visualização e o cálculo da atenuação sofrida pelo sinal de interferência é
possível analisar os resultados obtidos pela filtragem adaptável, o desempenho do filtro
e a manutenção da integridade dos dados nos canais livres de IRF. Este processo pode
ser observado no diagrama da Figura 5.1.
Brazilian SolarSpectroscope
BSS(aquisição dados)
BSSData(visualização e cálculo
da atenuação)
Matlab(filtragemadaptável)
BSSData(visualização)IBM PC 2
(armazenagem)
IBM PC 2(armazenagem)
FIGURA 5.1 – Diagrama dos equipamentos e processos utilizados na filtragem adaptável.
76
Os arquivos utilizados no desenvolvimento e testes do filtro foram cedidos pelo
responsável pelo instrumento BSS, da linha de P&D FMI da DAS-INPE.
5.2 Dados do Instrumento BSS
A Figura 5.2 mostra um diagrama esquemático da aquisição, armazenamento e
visualização dos dados do instrumento BSS.
AnalisadorEspectralP8559A
Servidor
Leitor Código de TempoEstação de Tempo
GPS 8820
Conversor A/D12 bits
RS-232
IBM-PC-(1)IBM-PC-(2)
SinalIRGB
Sistema deAquisição deDados
BSSView
Rede Ethernet
Somador
Alimentador Log-periódico Banda Larga
(200-2500MHz) comAntena de 9m diâmetro
LNA BandaLarga
LNA BandaLarga
FIGURA 5.2 – Diagrama representando o Brazilian Solar Spectroscope .
FONTE: Adaptada de Martinon e Fernandes (2000, p. 9).
O instrumento é constituído de uma antena parabólica de 9 m construída em malha de
alumínio (vide Figura 2.2) possuindo em seu foco um alimentador de banda larga (200 a
2500 MHz) composto por um par de antenas log-periódico cruzadas, o que permite a
recepção das componentes ortogonais (vertical e horizontal) do sinal recebido da fonte
(Sol).
A saída do alimentador do sistema é conectada a dois pré-amplificadores de baixo ruído,
ligados por sua vez a um circuito somador de banda larga. Após ser somado o sinal é
introduzido em um analisador espectral (HP8559A), que faz o papel de receptor,
operando no modo Z – medindo a intensidade no plano freqüência versus tempo. A
seguir os sinais de variação de tensão x freqüência, para cada varredura da banda de
freqüências, na saída do analisador seguem para os sistemas de armazenamento e

77
monitoramento. Como as varreduras são feitas em seqüência e durante todo o intervalo
correspondente à duração de um arquivo de dados obtemos na saída o que chamamos de
espectro dinâmico – curva de tempo (abscissa) versus canal de freqüência (ordenada)
versus intensidade (escala de cores).
A digitalização e armazenamento dos dados obtidos pelo BSS são realizados através de
uma placa digitalizadora de 12 bits (vide Figura 5.2). O sistema de aquisição de dados
do BSS digitaliza o sinal, proveniente do analisador espectral, correspondendo às
potências do espectro varrido, que é amostrado com uma resolução temporal que pode
ser selecionada entre 10 e 1000 ms, em até 100 canais de freqüência. Os parâmetros
ajustados na interface gráfica do programa de aquisição por Faria (1999) estão descritos
a seguir na Tabela 5.1:
TABELA 5.1 – Parâmetros do sistema de aquisição do BSS.
Parâmetro do BSS Faixa de Valores
Freqüência central 1000 - 2500 MHz.
Largura da banda 100, 200, 500 ou 1000 MHz.
Resolução temporal 10, 20, 50, 100, 200 ou 1000 milissegundos
Número de canais 25, 50 ou 100 canais
Tempo total de aquisição 1, 2.5, 5, 10, 15 ou 20 minutos FONTE: Adaptada de Faria (1999, p. 22).
O software de aquisição de dados foi criado com uma série de rotinas de digitalização,
inseridas em um módulo que também tem a função de controlar a placa digitalizadora.
Os dados digitalizados são armazenados em um formato binário proprietário (formato
.ESP, Faria, 1999). O tratamento e a visualização dos dados são realizados em tempo
quase-real. Além disto, também é armazenado o tempo absoluto no qual foram
realizadas as observações, através da aquisição do código de tempo gerado pela GPS
Station Clock, do Centro de Controle de Satélites (CCS) do INPE (Martinon e
Fernandes, 2000; Faria, 1999).

78
5.3 Formato dos Arquivos de Dados
Os dados são adquiridos em formato .ESP que é formado por duas partes principais:
• Cabeçalho: contém informações sobre o arquivo, e possui um tamanho fixo de
56 bytes.
• Vetor: armazena os dados digitalizados, e possui um tamanho variável.
O cabeçalho dos arquivos .ESP fornece as informações sobre as características dos
dados adquiridos, tais como: data e hora da aquisição, número de canais, resolução em
freqüência e resolução temporal, entre outros. Estas características estão separadas por
campos. A Tabela 5.2 exibe as designações dos campos, seus tamanhos e respectivas
descrições.
TABELA 5.2 – Campos do cabeçalho de um arquivo .esp. Campo Tamanho
(bytes) Descrição do Campo
Status 2 Utilizado internamente pelo programa de aquisição Df 2 Resolução espectral em MHz Dt 2 Resolução temporal em milissegundos
time_obs 8 Tempo do início da aquisição dos dados (hora, minutos, segundos, milissegundos)
time_end 8 Tempo do fim da aquisição dos dados (hora, minutos, segundos, milissegundos) Date 6 Data de aquisição dos dados (dia, mês e ano)
freq_obs 2 Freqüência inicial em MHz freq_end 2 Freqüência final em MHz
Scans 4 Número de varreduras Channels 2 Número de canais Duration 2 Duração total da aquisição em segundos Data_min 2 Mínimo elemento do conjunto de dados (tipicamente 0) data_max 2 Máximo elemento do conjunto de dados (tipicamente 4095) File_name 12 Nome do arquivo
Total 56
Logo após os 56 bytes referentes ao cabeçalho do arquivo .ESP é armazenado um vetor
com os dados digitalizados pelo BSS, vetor este de tamanho variável, dependendo
unicamente dos parâmetros “número de canais” e “número de varreduras”. Este
tamanho pode ser calculado, em bytes, da seguinte forma: Tamanho (bytes) = Número
de Canais X Número de Varreduras X 2 (multiplica-se por 2 pois cada valor é
armazenado em 2 bytes). Cada ponto digitalizado consiste em um valor inteiro entre 0 e
4095 (12 bits de resolução) e é armazenado como um inteiro longo (16 bits).

79
A leitura destes parâmetros dos cabeçalhos dos arquivos .ESP permite que os mesmos
sejam lidos e importados pelo programa específico de visualização-tratamento de dados.
5.4 Programa BSSData
O programa BSS-Data (Martinon e Fernandes, 2000), utilizado no desenvolvimento
deste trabalho, foi desenvolvido em linguagem C, e possibilita a visualização gráfica e
tratamento preliminar dos dados adquiridos pelo BSS. A Figura 5.3 exibe a tela do
BSSData.
FIGURA 5.3 – Visão geral do programa BSSData.
A entrada de arquivos do BSS no BSS-Data é realizada através do Gerenciador de
Projetos (Project Manager, Figura 5.3, canto superior esquerdo). A ferramenta permite
o agrupamento dos conjuntos de dados do BSS (arquivos .ESP) facilitando o acesso ao
usuário. As informações como a resolução espectral, data de aquisição, etc., são
exibidas quando se seleciona um arquivo do grupo, como pode ser visto na Figura 5.4.

80
Os botões “Add” e “Remove” adicionam ou removem um arquivo da lista,
respectivamente.
FIGURA 5.4 – Janela do gerenciador de projetos.
Por sua vez, através do botão “View”, o espectro dinâmico, perfil temporal e perfil
espectral são exibidos em uma janela gráfica independente, conforme exibido na Figura
5.5. Os perfis temporal e espectral de um arquivo podem ser observados com detalhes
nas janelas “Temporal profile” e “Spectral profile”, respectivamente. Estas janelas
possibilitam a identificação dos canais contendo IRF, e conseqüentemente da freqüência
dos mesmos. Diversos arquivos podem ser visualizados, e as diversas partes de um
arquivo de dados podem ser visualizadas através das barras de rolagem do programa.

81
FIGURA 5.5 – Visualização de um arquivo .ESP do BSS no programa BSSData.
Com o intuito de realçar um evento solar inteiro ou uma parte de interesse deste evento
os pesquisadores do grupo FMI utilizam o Gerenciador de Paletas (Palette Manager,
Figura 5.6, à esquerda), que permite a visualização do arquivo de dados sob uma ampla
gama de paletas de cores. Nas Figura 5.6 e Figura 5.7 pode ser visto o mesmo arquivo
de dados, mas utilizando-se duas paletas de cores diferentes. Via de regra, é utilizada a
paleta denominada “Red Temperature”.
Maiores detalhes sobre o funcionamento do programa BSSData estão dados no
Apêndice 2.

82
FIGURA 5.6 – Arquivo de dados visualizado com paleta “Red Temperature”.
FIGURA 5.7 – Arquivo de dados visualizado com paleta “Stern Special”.
5.5 Arquivos de Dados Utilizados neste Trabalho
Para o desenvolvimento deste trabalho, foram utilizados arquivos de dados observados
pelo instrumento BSS, cedidos pelo responsável pelo instrumento da Linha de Pesquisas
FMI da Divisão de Astrofísica do INPE.
Existem 3 tipos de arquivos: arquivo com linha de interferência, arquivo de calibração e
arquivo com fenômenos solares com linha de interferência. Os arquivos que possuem
apenas linha de interferência foram usados para o conhecimento da natureza e
características do sinal de interferência perturbador dos dados. Já o arquivo de

83
calibração foi necessário para se determinar a atenuação gerada pelo filtro adaptável
sobre o sinal de interferência quando aplicado ao arquivo de dados. Por sua vez, os
testes finais do filtro adaptável construído foram efetuados no arquivo contendo o
fenômeno solar para mostrar que o filtro apenas atenua o sinal de interferência sem
alterar o restante do arquivo de dados e também para validar a utilização do filtro. Para
a validação do filtro foram usados também os arquivos contendo apenas sinal de
interferência.
Arquivos com linha de interferência: Foram utilizados os seguintes arquivos:
090401C2.ESP, 090401C9.ESP, 040601C8.ESP e 040601C9.ESP. Os dois primeiros
foram registrados às 15:19:32 e 16:00:16 UT do dia 09 de abril de 2001, enquanto, os
dois últimos foram registrados as 15:06:48 e 15:12:39 UT do dia 04 de junho de 2001.
Estes arquivos foram adquiridos em 100 canais de freqüência dentro da faixa 1500-2500
MHz, com resolução temporal de 50 ms e duração de 5 minutos – 6000 varreduras.
Estes arquivos são necessários para que se obtenha informação sobre o nível do sinal
nos canais de freqüência adjacentes ou próximos àquele que apresenta o sinal de
interferência. O nível médio obtido dessa forma é utilizado como referencia para o nível
do sinal no canal de freqüência contaminado pelo sinal de interferência. Estes arquivos
podem ser observados na Figura 5.8 a seguir:

84
FIGURA 5.8 – Arquivos com linha de interferência (esquerda) e respectivo cabeçalho (direita).
Arquivos de calibração: Foram utilizados os arquivos 040601D5.ESP e
050702F1.ESP, o primeiro foi registrado às 15:47:44 UT do dia 04 de junho de 2001,
em 100 canais de freqüência, dentro da faixa 1500-2500 MHz, com resolução temporal
de 50 ms e duração de 5 minutos – 6000 varreduras. O segundo arquivo foi registrado às
15:52:21 UT do dia 05 de julho de 2002, em 100 canais de freqüência, dentro da faixa
1000-2000 MHz, com resolução temporal de 100 ms e duração de 5 minutos – 3000
varreduras. Estes arquivos são necessários para que seja possível quantificar a redução
sofrida pelo sinal de interferência, quando da aplicação do filtro adaptável que foi
desenvolvido, e podem ser observados na Figura 5.9:

85
FIGURA 5.9 – Arquivos de calibração (esquerda) e respectivo cabeçalho (direita).
Arquivos com fenômeno solar e linha de interferência: Foram utilizados os arquivos
090401C3.ESP, registrado às 15:25:21 UT do dia 09 de abril de 2001, e 050702F3.ESP,
registrado às 16:02:37 UT do dia 05 de julho de 2002. O primeiro foi observado em 100
canais de freqüência, dentro da faixa 1500-2500 MHz, com resolução temporal de 50
ms e duração de 5 minutos – 6000 varreduras. Por sua vez, o outro arquivo foi
observado em 100 canais de freqüência, dentro da faixa 1000-2000 MHz, com resolução
temporal de 100 ms e duração de 5 minutos – 3000 varreduras. Como já citado acima,
estes arquivos são usados para verificar a operação do filtro adaptável sobre o sinal de
interferência e a integridade dos dados nos outros canais de freqüência. Desta maneira,
pode-se validar ou excluir um determinado filtro que foi criado, de acordo com o
resultado de sua aplicação a um arquivo contendo o fenômeno solar de interesse das
investigações científicas. Estes arquivos podem ser observados na Figura 5.10.

86
FIGURA 5.10 – Arquivos com fenômeno solar e linha de interferência (esquerda) e respectivo cabeçalho (direita).
5.6 Calibração do BSS e Método de Medição da Atenuação
Um aspecto importante deste trabalho é a medida da eficiência da filtragem.
Normalmente, compara-se a saída do filtro com um sinal que não esteja afetado pelo
sinal de interferência, o qual deve ser conhecido a priori. No caso do BSS, o sinal livre
de interferência não está disponível, pois os dados foram armazenados contendo o sinal
de interferência. Além disso, não se conhece a fonte exata do sinal de interferência para
que este seja imediatamente extraído do dado armazenado. Como citado anteriormente,
estamos assumindo que os sinais de interferência sejam provenientes de telefonia fixa,
móvel, ou até mesmo sinal de internet via rádio, já bem difundida em São José dos
Campos. Para maiores detalhes consulte a carta de atribuição de freqüências da Anatel
(Anatel, 2003) ou a figura detalhada fornecida no Apêndice 1 .
Deve ser ressaltado que os dados adquiridos pelo instrumento BSS não são previamente
calibrados quando do armazenamento dos mesmos, pois a calibração dos dados em
todos os canais de freqüência demanda um tempo considerável que não está disponível
quando da aquisição dos dados. Neste caso, o que se faz é efetuar o armazenamento de
um arquivo de calibração periodicamente 1-2 vezes por mês, no caso das condições
observacionais de resolução em freqüência, resolução temporal, número de canais de
freqüência e faixa de freqüências de observação se repetirem durante um determinado
período de tempo. Contudo, se as condições observacionais se alteram, incluindo o

87
surgimento de novos sinais de interferência na faixa de freqüências de observações, uma
nova calibração é efetuada independentemente do tempo ocorrido a partir da última
calibração.
Normalmente, as condições observacionais se repetem ao longo de toda uma campanha
internacional de observações de fenômenos solares. A duração destas campanhas,
durante os períodos de máximo de atividade solar é da ordem de 2-3 semanas, ou mais,
dependendo da taxa de atividade solar. Portanto, como o receptor é bem estável e as
condições observacionais se repetem por um período de 2-3 semanas ou mais, ficou
definido que a taxa de calibrações seria de 1-2 por mês. Entre 1998 e meados de 2002
este foi o procedimento adotado. Em 2002, surgiram outros sinais de interferência
dentro da banda de freqüências de observação do BSS, e isto exigiu a tomada de
medidas para minimizar-eliminar as perturbações causadas por aqueles sinais nos dados
que estavam sendo adquiridos. Neste sentido, foi colocado um filtro analógico na
entrada do receptor para barrar os sinais de interferência. Simultaneamente, as
calibrações passaram a ser feitas diariamente a partir de então.
Além disso, sabendo que a filtragem dos sinais de interferência deve ter seu
desempenho estimado, neste trabalho adotamos a utilização da atenuação medida em
decibéis (dB) sofrida pelo sinal, após a aplicação do filtro adaptável, como estimativa
do desempenho do filtro. Este tipo de estimativa tem sido comumente utilizado nos
trabalhos sobre redes neurais aplicados à radioastronomia (Mitchel e Bower, 2001;
Barnbaum e Bradley, 1998).
O uso da atenuação em dB é necessário devido ao fato dos dados obtidos pelo BSS
estarem em unidades arbitrárias, como explicado acima, sem uma escala específica,
inviabilizando a comparação direta entre níveis de sinais de arquivos de dias diferentes.
Neste caso, a partir do arquivo de dados escolhido, estabelecemos como critério a
determinação do nível médio correspondente ao sinal livre de interferências e a
determinação do sinal puro de interferência para o canal contendo a interferência, como
descrito na penúltima seção deste Capítulo.

88
O procedimento de calibração em dB consiste em aplicar sucessivas - mínimo 3 e
máximo 10 – atenuações ao sinal de entrada, obtendo-se assim uma escala de
intensidade graduada em dB para a resposta do instrumento. As atenuações são
aplicadas e retiradas durante determinados intervalos de tempo, através de atenuadores
graduados em dB, gerando uma escala relativa graduada em dB, conforme pode ser
observado na Figura 5.11.
FIGURA 5.11 – Perfil temporal em um canal de freqüência (acima) e espectro dinâmico (abaixo) de uma calibração. FONTE: Adaptada de Nascimento et al. (2002, p. 11).
As atenuações em dB são de tal ordem que cada 3 dB altera o sinal de entrada por um
fator ~2. Desta forma, podemos obter uma expressão para a escala de intensidade em dB
(Tabela 5.3) como segue:

89
110log2
pdBp
=
Onde, dB é o ganho em decibéis, log é o logaritmo decimal, p1 e p2 são a potência de
saída e de entrada, respectivamente.
TABELA 5.3 – Relação entre níveis de potência de saída e atenuação em dB. Atenuação
(dB) Potência Relativa
0 1,000 3 0,5 6 0,25 9 0,125 12 0,0625
Atualmente, este procedimento de calibração é efetuado diariamente, como citado
acima, e através dele é possível relacionar a intensidade de sinais obtidos pelo BSS em
dias distintos. Deve ser ressaltado que a resposta ideal da calibração seria linear, mas
isto pode não ocorrer principalmente devido a imprecisões geradas pelo operador do
instrumento que executa as operações da calibração. Além disto, devido ao “nível de
fundo” do instrumento poder apresentar variação ao longo da faixa de freqüências de
operação, as respostas podem ser distintas ao longo dos vários canais de freqüência
escolhidos.
5.7 Conversão da Intensidade de Atenuação para a Escala de dB
Para medir o desempenho do filtro adaptável é necessário relacionar os níveis de
intensidade e a atenuação (em dB), seguindo alguns procedimentos ilustrados no
fluxograma da Figura 5.12.

90
ArquivoCalibração
ArquivoIRF
Fórmula de Conversão:Unidades =>dB
Normalizaçãoconjunta
entre [0,1]
Cálculo Médias
Seleção Canal Desejado
Tabela eAjuste Curva
Gráfico:Unidades x dB
FIGURA 5.12 – Fluxograma com procedimentos aplicados no arquivo de calibração.
Inicialmente, são lidos os dados do BSS referentes aos arquivos contendo o sinal de IRF
e a calibração.
Cada um destes arquivos gera uma matriz de dados, que são normalizadas entre 0 e 1,
levando-se em conta os valores mínimo e máximo encontrados, para que ambas tenham
a mesma escala. Na Figura 5.13 pode ser observado, em forma de espectro dinâmico
tridimensional, o resultado desta operação sobre o arquivo de calibração 040601D5.ESP
, referente ao dia 4 de julho de 2001 (convém esclarecer que a linha vertical em azul, à
direita e ao fundo, foi introduzida artificialmente, a fim de manter a compatibilidade de
palete da figura).

91
FIGURA 5.13 – Espectro dinâmico tridimensional de um arquivo de calibração.
A segunda etapa é o cálculo das médias dos intervalos de canal nível (1 dB, 2 dB, 3 dB,
etc...) da calibração para cada canal de freqüência, já que existem flutuações nos níveis.
Uma dificuldade adicional é que o acionamento dos atenuadores do sistema pode
provocar transientes no nível dos sinais, tal como é visto na Figura 5.14. Este problema
foi minimizado descartando-se dez por cento iniciais e dez por cento finais dos dados de
cada intervalo.

92
FIGURA 5.14 – Detalhe de um perfil temporal de um canal de freqüência de um arquivo de calibração, exibindo transientes.
A Figura 5.15 mostra o sinal da calibração num determinado canal de freqüência, com
as respectivas variações dos sinais de cada nível, em azul, e as médias obtidas para cada
nível, em vermelho.
FIGURA 5.15 – Médias dos intervalos de calibração em um perfil temporal.

93
A etapa final é a escolha de um canal em particular (neste caso ilustrativo será adotado o
canal 22) do qual serão extraídas as médias de cada intervalo de atenuação. A diferença
entre as médias obtidas para cada nível (1 dB, 2 dB, …) e a média do nível mínimo –
correspondente a 0 dB – nos fornece a Tabela 5.4, que relaciona a intensidade de cada
um dos níveis em unidades normalizadas à atenuação em dB correspondente aos sinais
daqueles níveis.
TABELA 5.4 – Relação entre atenuação em dB e unidades arbitrárias para o perfil temporal do canal 22.
Atenuação (dB)
Intensidade (unidades)
0 dB 0,0000 -1 dB 0,0185 -2 dB 0,0439 -3 dB 0,0597 -4 dB 0,0871 -5 dB 0,1135 -6 dB 0,1256 -7 dB 0,1362
Utilizando-se os valores desta Tabela cria-se um gráfico relacionando a atenuação (em
dB) com a intensidade e, em seguida, estes dados são ajustados a uma reta utilizando-se
um ajuste de curvas baseado em mínimos quadrados, tal como ilustrado na Figura 5.16.

94
FIGURA 5.16 – Gráfico de relação entre atenuação e intensidade.
Para o caso em particular (arquivo 040501D5.ESP, canal 22), obteve-se a seguinte
fórmula que relaciona diretamente a intensidade e a atenuação em dB:
0.0152- i*48.1214=dB , onde i são as unidades de intensidade e dB é a atenuação
obtida.
Esta fórmula pode agora ser utilizada para calcular diretamente a atenuação em dB
obtida pelo método da filtragem adaptável.
Deve-se observar que nem sempre a curva de atenuação se ajustará perfeitamente a uma
reta; existem variações na resposta do instrumento BSS, conforme a freqüência
analisada; e, além disto, o procedimento de calibração do BSS é manual, podendo
ocorrer imprecisões no manuseio pelo operador. O resultado são curvas de atenuação
variáveis, dependendo do canal de freqüência analisado. Na Figura 5.17 podem ser
observadas duas respostas diferentes para o mesmo arquivo de calibração. Uma resposta
praticamente linear para o canal 16 (à esquerda), enquanto que para o canal 50 (à
direita) a resposta é extremamente não-linear e se ajusta mal a uma reta.

95
FIGURA 5.17 – Diferença na resposta do BSS em relação aos canais 16 e 50.
Convém notar que ao quantificar a atenuação efetiva da filtragem adaptável em um
determinado canal de freqüência deve-se escolher como referência para a criação da
Tabela “dB x Intensidade”, um canal que:
• esteja livre da influência de IRF;
• apresente a curva de resposta mais linear;
• encontre-se o mais próximo possível do canal sendo analisado.
Assim, utilizando-se o procedimento detalhado acima, conseguiu-se uma maneira
prática de quantificar a eficiência da filtragem adaptável, relacionando a atenuação
efetiva da mesma com a atenuação que pode ser obtida através de filtros analógicos.

96
5.8 Filtragem Adaptável
Inicialmente, a utilização da filtragem adaptável nos dados do BSS apresentou
problemas diversos, tais como uma convergência excessivamente lenta, que poderia
inviabilizar o processo. Em algumas situações o filtro só se estabilizava após o
processamento de metade do arquivo de entrada, ou seja, grande parte dos dados eram
descartados. Além disto, na presença de mudanças bruscas ou de alta intensidade nos
sinais de entrada (devido a transientes, interferências ou mesmo explosões solares
intensas) o filtro se desestabilizava, e em algumas situações o processo divergia. Para
sanar estes problemas, foram realizadas modificações no modelo do filtro adaptável:
• Taxa de aprendizagem variável: a taxa de aprendizagem (α) do filtro adaptável
foi modificada de forma a se tornar variável, sendo maior no início do processo
de adaptação, de forma a forçar os pesos e limiar a convergir rapidamente para
os valores estacionários finais, e decrescendo gradativa e linearmente,
deixando assim o filtro imune às rápidas variações de intensidade que ocorrem
ocasionalmente.
• Diminuição da constante que atualiza o valor do limiar: esta constante vale 2
no filtro adaptável [ ( ) ( ) ( )1 2,0b k b k e kα+ = +r r r ], mas foi rebaixada a 0,2
[ ( ) ( ) ( )1 0,2b k b k e kα+ = +r r r ], pois verificou-se que a presença do limiar
distorcia a saída do filtro, principalmente quando ocorriam variações bruscas
no nível do sinal de entrada. Experimentou-se utilizar uma rede adaptável sem
o limiar, mas os resultados obtidos foram ainda piores. Entretanto com a
redução do valor da constante para 0,2 o problema foi minimizado e as
distorções foram suprimidas.
• Pesos e limiar iniciais diferentes de zero: no modelo clássico os pesos e limiar
iniciais são ajustados em zero, e progressivamente convergem para os valores
estacionários. Como nos dados do BSS esta convergência estava
excessivamente lenta, a saída foi observar a tendência dos valores finais dos
pesos e limiar, criar uma média destes valores, e aplicá-los como valores

97
iniciais, de forma a reduzir o período de adaptação do filtro. Após a realização
destas mudanças, o resultado final foi uma melhora no processo de filtragem
adaptável, impedindo o filtro de divergir na presença de transientes de alta
intensidade, viabilizando assim sua utilização efetiva nos dados do BSS.
5.9 Canal de Saída Estimado e Interferência Estimada
A fim de poder medir o desempenho do filtro adaptável para a determinação dos
diversos parâmetros do mesmo, foi necessário definir uma saída estimada do filtro
(devido à impossibilidade técnica de se obter um sinal de entrada puro, livre de
interferências). De posse desta saída, torna-se simples calcular a soma do erro
quadrático, entre a resposta de saída do filtro adaptável e o sinal estimado, e utilizá-lo
como medida de desempenho. Além disto, existe a necessidade da geração de um sinal
de interferência estimado, que será utilizado, juntamente com o sinal original, como
entrada para o filtro adaptável. Para a estimação destes sinais utilizou-se a seguinte
metodologia exibida no diagrama de blocos da Figura 5.18 e descrita abaixo:
• Define-se o canal de freqüência com interferência a ser processado pelo filtro
adaptável (daqui por diante referido como Canal Original).
• Procuram-se dois canais, livres de interferência, adjacentes (um de freqüência
mais alta e outro de freqüência mais baixa) o mais próximo possível do Canal
Original (já que, via de regra, a interferência afeta alguns canais, mas não
todos).
• Utiliza-se uma interpolação linear entre estes dois canais adjacentes, gerando
assim um Canal de Saída Estimado (que é a estimação do Canal Original, caso
não estivesse corrompido por interferência).
• Faz-se a subtração do Canal Original pelo Canal de Saída Estimado, obtendo-
se assim a Interferência Estimada (que normalmente seria adquirida por uma
segunda antena).
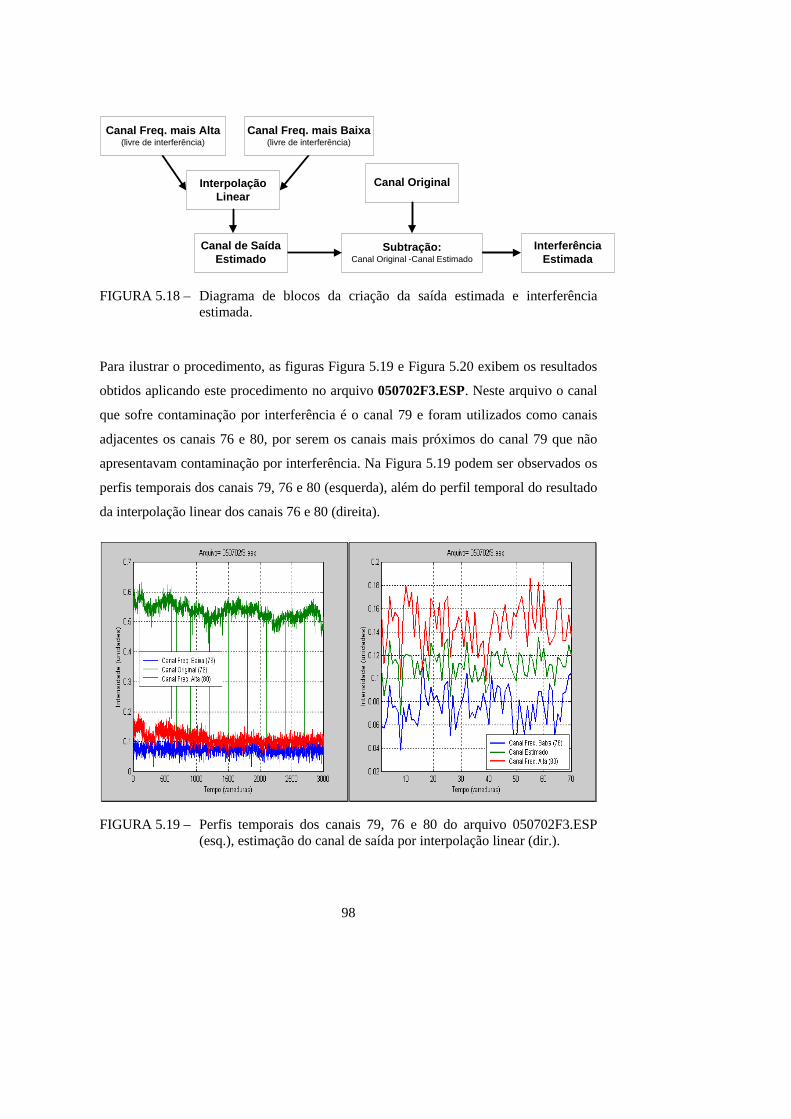
98
InterpolaçãoLinear
Subtração:Canal Original -Canal Estimado
Canal Freq. mais Alta(livre de interferência)
Canal Freq. mais Baixa(livre de interferência)
Canal de SaídaEstimado
Canal Original
InterferênciaEstimada
FIGURA 5.18 – Diagrama de blocos da criação da saída estimada e interferência estimada.
Para ilustrar o procedimento, as figuras Figura 5.19 e Figura 5.20 exibem os resultados
obtidos aplicando este procedimento no arquivo 050702F3.ESP. Neste arquivo o canal
que sofre contaminação por interferência é o canal 79 e foram utilizados como canais
adjacentes os canais 76 e 80, por serem os canais mais próximos do canal 79 que não
apresentavam contaminação por interferência. Na Figura 5.19 podem ser observados os
perfis temporais dos canais 79, 76 e 80 (esquerda), além do perfil temporal do resultado
da interpolação linear dos canais 76 e 80 (direita).
FIGURA 5.19 – Perfis temporais dos canais 79, 76 e 80 do arquivo 050702F3.ESP (esq.), estimação do canal de saída por interpolação linear (dir.).

99
Convém notar que a intensidade do Canal Original é muito alta, justamente por causa da
grande intensidade da interferência somada ao mesmo. Após a interpolação e o cálculo
da Saída Estimada, realiza-se a subtração do Canal Original pela Saída Estimada,
obtendo-se assim a Interferência Estimada, como pode ser observado no perfil temporal
da Figura 5.20.
FIGURA 5.20 – Perfil temporal da interferência estimada.
Assim, após a obtenção do Sinal de Interferência Estimada, já é possível realizar a
filtragem adaptável no Canal Original. A saída obtida pela filtragem adaptável, em
conjunto com o Canal de Saída Estimado, será utilizada no cálculo da soma do erro
quadrático, um valor utilizado como medida de desempenho para o filtro adaptável. Este
processo pode ser observado no fluxograma da Figura 5.21.
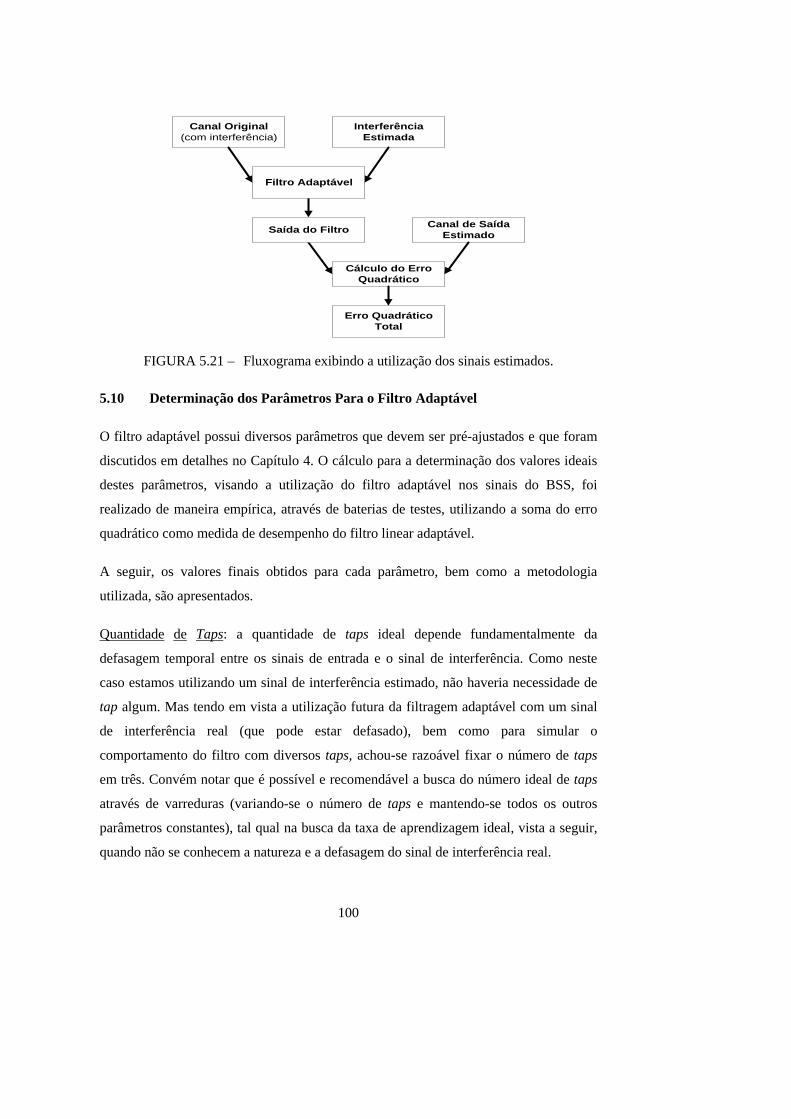
100
Canal Original(com interferência)
InterferênciaEstimada
Filtro Adaptável
Saída do Filtro Canal de SaídaEstimado
Cálculo do ErroQuadrático
Erro QuadráticoTotal
FIGURA 5.21 – Fluxograma exibindo a utilização dos sinais estimados.
5.10 Determinação dos Parâmetros Para o Filtro Adaptável
O filtro adaptável possui diversos parâmetros que devem ser pré-ajustados e que foram
discutidos em detalhes no Capítulo 4. O cálculo para a determinação dos valores ideais
destes parâmetros, visando a utilização do filtro adaptável nos sinais do BSS, foi
realizado de maneira empírica, através de baterias de testes, utilizando a soma do erro
quadrático como medida de desempenho do filtro linear adaptável.
A seguir, os valores finais obtidos para cada parâmetro, bem como a metodologia
utilizada, são apresentados.
Quantidade de Taps: a quantidade de taps ideal depende fundamentalmente da
defasagem temporal entre os sinais de entrada e o sinal de interferência. Como neste
caso estamos utilizando um sinal de interferência estimado, não haveria necessidade de
tap algum. Mas tendo em vista a utilização futura da filtragem adaptável com um sinal
de interferência real (que pode estar defasado), bem como para simular o
comportamento do filtro com diversos taps, achou-se razoável fixar o número de taps
em três. Convém notar que é possível e recomendável a busca do número ideal de taps
através de varreduras (variando-se o número de taps e mantendo-se todos os outros
parâmetros constantes), tal qual na busca da taxa de aprendizagem ideal, vista a seguir,
quando não se conhecem a natureza e a defasagem do sinal de interferência real.

101
Taxa de aprendizagem (α): a determinação deste parâmetro foi realizada de maneira
empírica, com uma bateria de testes nos diversos arquivos do BSS utilizados. Os testes
consistiam de varreduras, nas quais os valores de α eram variados entre um mínimo e
um máximo (geralmente entre zero e um), os outros parâmetros eram mantidos
constantes, e a melhor saída obtida (a que apresentava a menor soma do erro quadrático)
era escolhida. Um exemplo deste procedimento pode ser visto na Figura 5.22.
Taps= 3; a= 0.00350; Erro1= 1.358064; Taps= 3; a= 0.04833; Erro1= 0.317990; Taps= 3; a= 0.09315; Erro1= 0.277997; Taps= 3; a= 0.13798; Erro1= 0.265777; Taps= 3; a= 0.18280; Erro1= 0.262392; Taps= 3; a= 0.22763; Erro1= 0.263544; Taps= 3; a= 0.27245; Erro1= 0.267567; Taps= 3; a= 0.31728; Erro1= 0.273633; Taps= 3; a= 0.36210; Erro1= 0.281278; Taps= 3; a= 0.40693; Erro1= 0.290243; Taps= 3; a= 0.45175; Erro1= 0.300391; Taps= 3; a= 0.49657; Erro1= 0.311677; Taps= 3; a= 0.54140; Erro1= 0.324124; Taps= 3; a= 0.58623; Erro1= 0.337818; Taps= 3; a= 0.63105; Erro1= 0.352901; Taps= 3; a= 0.67588; Erro1= 0.369575; Taps= 3; a= 0.72070; Erro1= 0.388111; Taps= 3; a= 0.76553; Erro1= 0.408864; Taps= 3; a= 0.81035; Erro1= 0.432298; Taps= 3; a= 0.85518; Erro1= 0.459020; Taps= 3; a= 0.90000; Erro1= 0.489839;
FIGURA 5.22 – Resultados obtidos com a procura do parâmetro α ideal.
Convém notar que o valor do parâmetro α é de certa forma crítico, já que um α pequeno
leva a uma convergência lenta e um α muito grande leva o processo de filtragem
adaptável a divergir. Assim, na determinação do parâmetro α ideal para os arquivos do
BSS, o número de taps foi fixado em 3, como visto acima e, após encontrados os
melhores valores de α em cada caso (os que geravam a menor soma do erro quadrático),
foi realizada uma média entre eles de forma a se obter um α geral, que fosse satisfatório
para todos os casos. A Tabela 5.5 exibe os melhores α encontrados em cada caso, bem
como a média entre eles.

102
TABELA 5.5 – Taxas de aprendizagem obtidas e média. Arquivo Testado Canais Utilizados Melhor Taxa de Aprendizagem (α) 090401C3. ESP 41 e 45 0.075 e 0.065 050702F3. ESP 79 0.225 040601C8.ESP 40 e 46 0,080 e 0,090
α Médio= 0.107
Pesos e Limiar iniciais: os valores dos pesos e limiar iniciais foram obtidos verificando
os valores finais destes parâmetros após cada teste, utilizando três taps e o melhor valor
de taxa de aprendizagem, para cada canal e arquivo (conforme determinados no item
anterior). O limiar médio encontrado foi de 0,157. Os pesos W0, W1 e W2 oscilaram
sempre em torno de zero (com valores em geral menores que 0,03 unidades arbitrárias),
e por este motivo foram definidos como zero. O peso W3 médio encontrado foi de
0,913. A utilização destes pesos e limiar iniciais não é fundamental, mas a utilização
dos mesmos como zero inicialmente (conforme a teoria de filtragem adaptável clássica)
faz com que a convergência do filtro seja lenta, sendo que muitas vezes todo o arquivo
de dados é processado sem que a convergência do filtro adaptável seja alcançada.
Este Capítulo apresentou detalhes técnicos sobre todos os materiais envolvidos neste
trabalho, desde as particularidades do instrumento BSS e o formato dos dados obtidos
pelo mesmo, até os detalhes sobre a implementação da filtragem adaptável nos dados do
BSS, além do problema da medição efetiva da atenuação do processo de filtragem
adaptável, bem como a solução adotada para realizar esta medição.
Os resultados obtidos pela filtragem adaptável, os problemas encontrados e soluções
obtidas são apresentados no Capítulo seguinte. Além disto, o procedimento criado para
medir a atenuação efetiva da filtragem adaptável, através dos arquivos de calibração, é
utilizado para validar e quantificar estes resultados obtidos.

103
CAPÍTULO 6
RESULTADOS OBTIDOS
6.1 Aplicação da Filtragem Adaptável
Para demonstrar a eficácia do método de filtragem adaptável foi escolhido para exemplo
o arquivo 050702F3.ESP do BSS. Este arquivo apresenta apenas uma linha de
interferência bem pronunciada, no canal 79 (1.790 MHz), o que torna mais fácil a
observação do trabalho realizado pelo filtro. Os parâmetros utilizados no filtro adaptável
foram aqueles determinados empiricamente como descrito no Capítulo 5. A Tabela 6.1
apresenta os parâmetros determinados e utilizados neste trabalho.
TABELA 6.1 – Parâmetros utilizados no filtro adaptável. Parâmetro Valor
Tipo de filtro Linear modificado Taxa de aprendizagem (α) 0.107 (valor inicial) Número de Taps 3 Pesos iniciais W0= 0, W1= 0, W2= 0, W3= 0.913 Limiar inicial B= 0.157
Na Figura 6.1 (superior e inferior) está mostrado o resultado obtido da aplicação da
versão linear modificada do filtro adaptável. Podemos ver o arquivo original e o
espectro dinâmico contendo uma intensa linha de interferência, exibido na parte
superior da figura. Já o espectro dinâmico da parte inferior mostra o efeito da aplicação
do filtro sobre a linha de interferência. Observa-se claramente que o sinal de
interferência foi quase eliminado ao passo que o fenômeno solar existente neste arquivo
- estrutura alongada em forma de mancha horizontal - tornou-se mais evidente. Isto
ocorre devido à escala da tabela (paleta) de cores do BSSData que é padronizada. De
qualquer maneira, a interferência - linha horizontal - foi minimizada e o restante dos
dados teve sua integridade preservada.

104
FIGURA 6.1 – Arquivo 050702F3.ESP: comparação entre o arquivo original (figura superior) e o arquivo após ser processado pelo filtro adaptável (figura inferior).
Este mesmo resultado, visto em 3 dimensões (para uma melhor análise dos detalhes),
pode ser observado na Figura 6.2, onde fica mais evidente a intensidade da linha de
interferência do canal 79, aqui vista na forma de uma “cortina” que se destaca
visivelmente do nível de fundo da figura. Um evento solar (objeto em forma de mancha
na parte superior direita da figura) é observado nas imediações do canal 20, onde pode-
se observar a magnitude da linha de interferência em comparação com o restante dos
dados.
FIGURA 6.2 – Vista tridimensional do arquivo 050702F3.ESP original, com uma linha de interferência no canal 79.

105
A linha de interferência do canal 79 é praticamente eliminada após o processamento
pelo filtro adaptável, como pode ser observado na Figura 6.3. Note-se a pequena
protuberância nas primeiras dez a quinze varreduras do canal 79 (parte inferior esquerda
da figura), correspondente ao curto período de adaptação do filtro, no qual os valores
dos pesos e o limiar estão variando. Após a convergência dos pesos e do limiar para os
valores ideais, a protuberância desaparece, já que a filtragem adaptável praticamente
elimina a linha de interferência, em uma comparação visual.
FIGURA 6.3 – Arquivo 050702F3.ESP após os dados serem processados pelo filtro adaptável.
A Figura 6.4 exibe o perfil temporal do canal 79, em comparação com o valor estimado
do mesmo (conforme o procedimento visto no Capítulo 5). Pode-se observar que no
início do processo de filtragem (Figura 6.4 à esquerda) a discrepância entre a saída do
filtro e o valor estimado desejado é grande (apresentando uma soma do erro quadrático
entre os dois sinais neste intervalo de 0.8584), mas o filtro adapta-se rapidamente,
convergindo por volta da varredura 20. À medida que o filtro adaptável atua seus pesos
e limiar ajustam-se progressivamente; ao final do processo a diferença entre o canal 79
processado e a estimativa do mesmo é praticamente desprezível (soma do erro
quadrático entre os sinais no intervalo de 0.0106, Figura 6.4 à direita).

106
FIGURA 6.4 – Comparação entre a saída do filtro adaptável e o sinal estimado, no início do processo de filtragem (esquerda) e ao final (direita).
6.2 Comparação entre as Diferentes Implementações do Filtro Adaptável
Como visto no Capítulo 5, foram realizadas modificações na parametrização do
algoritmo do filtro adaptável, tais como a taxa de aprendizagem variável e a mudança na
constante de multiplicação do limiar, além dos pesos iniciais e limiar diferentes de zero.
A fim de atestar a eficiência destas modificações (utilizando como critério a soma do
erro quadrático, calculado entre a saída dos filtros e a saída desejada estimada) foi
realizada uma comparação entre três algoritmos: filtro linear adaptável, o filtro linear
adaptável com modificações e uma versão não-linear do filtro modificado. A Tabela 6.2
exibe esta comparação entre os três tipos de filtros testados.
TABELA 6.2 – Desempenho dos filtros adaptáveis. Tipo de Filtro
Adaptável Soma do Erro
Quadrático Erro Relativo ao Melhor Caso (Filtro
Linear Modificado) Linear Clássico 2,330584 +587% Linear Modificado 0,339264 0% Não-Linear 0,401989 +18%
É notória a grande diferença entre os valores da soma dos erros quadráticos obtida pelo
filtro linear adaptável e sua versão modificada. Isto ocorre porque o primeiro gera

107
“picos” em sua saída, enquanto os outros dois filtros apresentam saídas mais suaves,
como pode ser observado na Figura 6.5. Estes picos ocorrem devido às variações
rápidas na intensidade da interferência, que o filtro adaptável clássico não consegue
compensar.
FIGURA 6.5 – Comparação entre as saídas dos filtro adaptável (esquerda) e de sua modificação (direita).
6.3 Comparações entre o Filtro Linear Modificado e o Não-Linear Modificado
Também foi realizada uma comparação entre um filtro adaptável utilizando uma função
de ativação linear e uma versão utilizando uma função de ativação não-linear (função
logística, como visto no Capítulo 4). O critério de comparação utilizado foi a soma do
erro quadrático, calculado entre a saída do filtro adaptável e a saída desejada estimada,
em cada ponto. Através de um processo de varredura, onde variando-se a taxa de
aprendizagem α nos dois tipos de filtro, e fixou-se os outros parâmetros, foi possível
comparar o melhor caso, ou seja, aquele que apresentou a menor soma do erro
quadrático. Os valores encontrados foram de 0,334169 para a versão linear do filtro
adaptável e de 0,544282 para a versão não-linear.
O resultado completo pode ser observado na Tabela 6.3, com os melhores casos
encontrados grifados.

108
TABELA 6.3 – Comparação entre a soma do erro quadrático das duas versões de filtro adaptável modificado.
Filtro Adaptável Linear Filtro AdaptávelNÃO-LINEAR
Taxa de Aprendizagem (α)
Soma do Erro Quadrático
Taxa de Aprendizagem (α)
Soma do Erro Quadrático
0.04500 0.432529 0.00000 1.387366 0.09000 0.368033 0.45000 1.114450 0.13500 0.345465 0.90000 0.791996 0.18000 0.336348 1.35000 0.658060 0.22500 0.334169 1.80000 0.591637 0.27000 0.336299 2.25000 0.558625 0.31500 0.341434 2.70000 0.545036 0.36000 0.348879 3.15000 0.544282 0.40500 0.358275 3.60000 0.553122 0.45000 0.369468 4.05000 0.570054 0.49500 0.382443 4.50000 0.594586 0.54000 0.397302 4.95000 0.626881 0.58500 0.414253 5.40000 0.667602 0.63000 0.433623 5.85000 0.717894
A Figura 6.6 exibe estes mesmos dados em forma de gráficos, sendo que a curva à
esquerda apresenta os resultados da versão linear modificada, e a curva à direita os
resultados da versão não-linear.
FIGURA 6.6 – Curvas da soma do erro quadrático para o filtro linear adaptável modificado (esquerda) e não-linear modificado (direita).

109
A diferença entre ambos os tipos de função de ativação foi pequena (soma do erro
quadrático de aproximadamente 0,334 na versão linear do filtro, frente aos 0,544 da
versão não-linear). Na prática, a utilização de qualquer um dos filtros seria satisfatória.
Convém notar que apesar da faixa de valores do parâmetro α ser bem maior no caso do
filtro não-linear, isto não afeta a comparação entre os métodos (um valor maior para o
parâmetro α é necessário devido a existência da função exponencial no filtro não linear,
que reduz o valor dos dados de entrada).
Um fator desfavorável à abordagem não-linear do filtro adaptável é o custo
computacional do mesmo. Enquanto a versão linear utiliza apenas somas e
multiplicações, a versão não-linear utiliza divisão e uma função exponencial, que são
computacionalmente mais dispendiosas para o processador. O resultado final é que o
filtro adaptável não-linear torna-se cerca de 73% mais lento, conforme a Tabela 6.4.
TABELA 6.4 – Comparação entre os tempos de execução das duas versões de filtro adaptável.
Versão do Filtro Adaptável
Tempo de Despendido em 100 Execuções
Tempo Médio de Execução
Tempo de Execução Relativo
Linear 266,790 segundos 2,668 segundos 0 % Não-linear 461,560 segundos 4,616 segundos +73 %
O teste foi realizado sobre o arquivo 050702F3.ESP, em um computador Atlhon XP
1800+ (1.53 GHz), com 256 MB de memória RAM. O sistema operacional utilizado foi
o Windows NT 4.0, Service Pack 6, e Matlab 5.2. A prioridade do processo do Matlab
foi ajustada para tempo real, a fim de obter os resultados mais precisos possíveis.
Um ponto positivo a favor da versão não-linear do filtro adaptável é não ocorrência do
fenômeno de overflow (valores da saída tendendo ao infinito), já que a função de
ativação tangente hiperbólica varia estritamente entre –1 e 1. O overflow pode ocorrer
com a versão linear do filtro, freqüentemente travando a execução do programa.
Também vale a pena frisar que o desempenho superior da versão linear modificada do
filtro adaptável foi observado utilizando-se um pequeno conjunto de dados do BSS.

110
Uma análise mais abrangente é necessária (devido à enorme gama de eventos solares
observados pelo BSS) já que podem existir situações em que a eficiência do filtro não-
linear talvez possa se revelar superior.
6.4 Atenuação Obtida pelo Filtro Adaptável
Como explicado no Capítulo 5, um critério utilizado para medir a eficiência de filtros
em radioastronomia é a medida da atenuação que os mesmos causam nos sinais com
interferência, sendo esta atenuação medida em dB. Assim sendo, foram realizadas
calibrações da intensidade em dB a fim de medir a atenuação obtida pelo filtro linear
adaptável, utilizando para isto os procedimentos discutidos naquele Capítulo.
O canal usado para calibrar a escala de intensidade em dB foi o canal 80 do arquivo de
calibração, já que o mesmo se encontra bem próximo do canal processado pelo filtro
adaptável, o canal 79. Um perfil temporal do canal 80 pode ser observado na Figura 6.7
à esquerda. A mesma figura, à direita, exibe a curva relacionando unidades de
intensidade e dB.
FIGURA 6.7 – Sinal de calibração do canal 80 (esquerda) e curva de aproximação para a conversão entre unidades de intensidade e dBs.

111
Desta maneira, chegamos à fórmula para conversão entre unidades arbitrárias e dB para
este caso, que é: 13,4302*i+0,1294dB = , onde i é o valor da intensidade e dB o valor
convertido para decibéis. Tomando as médias dos sinais envolvidos - retas em preto na
Figura 6.8, temos um valor médio de 0,6343 para o sinal original e um valor médio de
0,2871 para a saída do filtro linear adaptável. Isto resulta em uma atenuação efetiva de
0,6343 0, 2871 0,3472− = . Utilizando a fórmula de conversão encontrada acima, temos:
13,4302*i+0,129413,4302*3472+0,12944,7924
dBdBdB
===
FIGURA 6.8 – Comparação entre sinal o original, o processado pelo filtro adaptável e o sinal de calibração correspondente.
Ou seja, o filtro linear adaptável conseguiu uma redução efetiva média na interferência
de aproximadamente 5 dB. Convém notar que esta atenuação ocorre apenas na
interferência, já que o sinal original é preservado.
6.5 Resultados para a Aplicação do Filtro a Outros Arquivos de Dados
No arquivo 040601C9.ESP o processo de filtragem adaptável conseguiu atenuações
variáveis nos canais, chegando a uma atenuação de até 25 dB no canal 40. O resultado

112
pode ser observado em formato de espectro dinâmico tridimensional na Figura 6.9 e em
espectro dinâmico na Figura 6.10 a seguir.
FIGURA 6.9 – Vista tridimensional do arquivo 040601C9.ESP original (acima) e após ser processado pelo filtro adaptável (inferior).

113
FIGURA 6.10 – Arquivo 040601C9.ESP: comparação entre o arquivo original (figura superior) e o arquivo após ser processado pelo filtro adaptável (figura inferior).
Já o arquivo 090401C3.ESP apresentava diversas linhas de interferência, que foram
atenuadas após o processamento pelo filtro, conforme pode ser visto na Figura 6.11.
Devido à presença do evento solar na figura, a observação do resultado da filtragem
adaptável fica dificultada. A Figura 6.12 oferece uma vista tridimensional deste
resultado, para uma melhor observação dos detalhes.
FIGURA 6.11 – Arquivo 090401C3.ESP: comparação entre o arquivo original (superior) e o arquivo após processado pelo filtro adaptável (inferior).

114
FIGURA 6.12 – Vista tridimensional do arquivo 090401C3.ESP original (acima) e após ser processado pelo filtro adaptável (inferior).
Em todos estes casos foram utilizados os mesmos parâmetros ajustados no filtro linear
adaptável do tratamento do arquivo 050702F3, descritos na Tabela 6.1. Um resumo dos
valores de atenuação obtidos pelo filtro nos casos acima vistos pode ser observado na

115
Tabela 6.5. Convém notar a ausência de valores de atenuação no caso do arquivo
090401C3.ESP, já que o mesmo não apresenta um arquivo de calibração relacionado, o
qual é necessário para calcular os valores de atenuação.
TABELA 6.5 – Atenuações obtidas pelo filtro adaptável. Arquivo Canais Processados Atenuação em dB
050702F3.ESP 79 5 040601C8.ESP 40 e 46 30 e 10 040601C9.ESP 40 e 46 25 e 11
Encerra-se assim este Capítulo, o qual apresentou os resultados práticos obtidos pela
utilização de filtragem adaptável nos dados do instrumento BSS e a atenuação em dB
obtida por esta técnica.Também foi realizada uma comparação entre o filtro adaptável
clássico e o filtro adaptável com modificações, bem como comparado o desempenho
entre as versões linear e não-linear (tangente-hiperbólica) do filtro adaptável
modificado.
No último Capítulo são discutidos os resultados obtidos e apresentadas as conclusões
sobre este trabalho e, principalmente, sugeridas diretrizes para a continuação do mesmo,
os próximos passos a serem adotados e idéias sobre implementações futuras.

116

117
CAPÍTULO 7
CONCLUSÕES E PERSPECTIVAS
Neste Capítulo final são discutidas as conclusões, além de apresentadas as perspectivas
que podem dar continuidade a este trabalho.
7.1 Conclusões
Uma metodologia para utilização de filtragem adaptável para minimizar-eliminar sinais
de interferência dos dados de observação solar do instrumento BSS foi criada e aplicada
neste trabalho, sendo os resultados os seguintes:
Modelo modificado: com base no modelo de filtro linear adaptável, foi criado um
modelo modificado, com uma taxa de aprendizagem variável e inclusão de valores
iniciais de pesos e limiar pré-calculados. Este modelo modificado apresentou um
resultado adequado no tratamento dos dados do BSS. Além disto, foi criado um modelo
de filtro adaptável não-linear, utilizando a função de ativação tangente hiperbólica.
Filtro Ideal: a comparação entre os filtros apontou para a versão linear modificada como
a melhor escolha, pois a mesma conseguiu uma soma do erro quadrático menor (soma
do erro quadrático de 0,339264, contra um erro quadrático de 0,401989 para a versão
não-linear), além da versão não-linear ser 73% mais lenta que a versão linear. Porém,
uma pesquisa mais cuidadosa é necessária, pois pode haver situações onde o
desempenho da versão não-linear obtenha resultados melhores. Desta forma, uma
análise cuidadosa e testes adicionais são necessários para que seja melhor caracterizado
o desempenho dos dois tipos de filtros.
Parâmetros Corretos Para o Filtro: após uma grande quantidade de testes empíricos foi
possível determinar parâmetros eficazes para o correto funcionamento da filtragem
adaptável sobre os sinais de interferência dos dados do BSS, de forma que o filtro
convergisse em um tempo satisfatório (tipicamente de 10 a 20 varreduras). Estes
parâmetros, tais como a taxa de aprendizagem, uma quantidade de taps suficiente, e
valores iniciais para os pesos e limiar (observados na TABELA 6.1), funcionaram

118
satisfatoriamente nos arquivos do BSS utilizados para testes, e recomenda-se a
utilização dos mesmos como ponto de partida para testes futuros.
Atenuação Efetiva: utilizando dados de calibração do instrumento BSS, foi possível
medir a atenuação efetiva do filtro linear adaptável nos arquivos de testes. O resultado
foi uma atenuação entre 5 e 30 dB. Deve ser ressaltado que os resultados mostraram que
a atenuação ocorre principalmente na interferência, de forma que o sinal original numa
primeira análise manteve-se inalterado.
Em suma, este trabalhou conseguiu demonstrar a viabilidade da aplicação da técnica de
filtragem adaptável, na diminuição ou mesmo cancelamento de interferências nos dados
armazenados do instrumento BSS. Convém notar que existem 5 anos de dados (1999 a
2003, inclusive, obtidos diariamente das 9 às 16 horas pelo instrumento BSS) com pelo
menos 3 anos e meio de dados contendo sinais de interferência. O filtro adaptável que
foi desenvolvido neste trabalho poderá ser usado junto aos programas de tratamento e
análise de dados do BSS tão logo seja implementado naqueles programas. Poderá servir
também como ferramenta aplicada a outros equipamentos similares ao BSS.
7.2 Perspectivas Futuras
Em vista dos bons resultados apresentados pelo processo de filtragem adaptável,
algumas sugestões e perspectivas futuras para a continuidade deste trabalho são
apresentadas a seguir.
Primeiramente, o BSSData, um dos programas utilizados para analisar os dados do BSS,
está sendo aperfeiçoado com a inclusão de uma biblioteca de rotinas vetorizadas para
filtragem de dados (Martinon et al., 2002b). O procedimento de filtragem adaptável
poderia ser incluído nesta biblioteca, devidamente convertido para a linguagem C++ e
otimizado utilizando-se instruções MMX - Multimedia Extensions, um conjunto de
instruções utilizadas para otimização de programas críticos (Martinon et al., 2002a). O
protótipo para a nova versão do programa BSSData já existe (Martinon, 2003). E como
o mesmo será implementado seguindo um esquema modular, a inclusão do filtro

119
adaptável seria relativamente simples. A Figura 7.1 exibe o diagrama esquemático da
nova versão do BSSData.
O filtro adaptável também poderia ser implementado em hardware para operar, em
tempo real ou quasi-real, junto à aquisição e registro de dados do instrumento BSS
utilizando microprocessadores ou equipamentos similares.
FIGURA 7.1 – Diagrama de blocos representando o protótipo do novo programa BSSData, com a inclusão do filtro adaptável. FONTE: Modificada de Martinon (2003, p. 92).
Além disto, o Grupo FMI está construindo um novo instrumento para recepção de sinais
de rádio. Tal qual o instrumento BSS, este novo instrumento poderá ser afetado por IRF
proveniente de diversas fontes. Uma vez que este instrumento será constituído por um
conjunto de antenas, poderemos testar a utilização de uma ou mais antenas com a
finalidade de adquirir apenas os sinais de IRF, permitindo assim a aplicação do método
de filtragem adaptável em tempo real ou quasi-real durante o processo de aquisição de
dados. Neste caso, devido à maior quantidade de dados e existência de múltiplas
antenas, um computador IBM PC poderá não ter capacidade suficiente de
processamento para esta tarefa. Uma solução para este problema de capacidade de

120
processamento seria a utilização de chips com matriz de portas programáveis no campo
(FPGA - Field Programmable Gate Arrays), um chip lógico programável, capaz de
implementar o algoritmo de filtragem adaptável diretamente em hardware (Blake et
al.,1998; Girau, 2001; Edwards, Forrest e Whelan, 1997; Lim, Rajapakse e Omondi,
2002).

121
REFERÊNCIAS BIBLIOGRÁFICAS
Agência Nacional de Telecomunicações - Anatel. Atribuição de faixas de freqüências no Brasil. Disponível em: <http://www.anatel.gov.br/radiofrequencia/ qaff.pdf>. Acesso em: 12 mar. 2003.
Barnbaum, C.; Bradley, R. F. A new approach to interference excision in radio
astronomy: real-time adaptive cancellation. The Astronomical Journal, n. 115, p. 2598-2614, Nov. 1998.
Blake, J.J.; Maguire, L.P.; McGinnity, T.M.; Roche, B.; McDaid, L.J. The
implementation of fuzzy systems, neural networks and fuzzy neural networks using FPGAs. Information Sciences, n. 112, p. 151-168, Nov. 1998.
Butterweck, H. J. Basic theory of the LMS adaptive filter: recent developments. In:
Annual ProRISC/IEEE Workshop on Circuits, Systems and Signal Processing, 8., Nov. 1997, Mierlo, Netherlands. Proceedings… Utrecht: STW, 1997. p. 101-108. (ISBN 90-73461-12-X).
Cecatto, J. R. Radiômetro milimétrico de alta resolução e fragmentação
temporal de fulgurações solares durante a fase impulsiva. 1996. 147 p. (INPE- 6126-TDI/587). Tese (Doutorado em Astrofísica) - Instituto Nacional de Pesquisas Espaciais, São José dos Campos, 1996.
Cecatto, J. R. O Sol. In: Milone, A. C. et al. (ed.). Introdução à astronomia e
astrofísica. São José dos Campos: INPE, 2003. (INPE- 7177-PUD/38). Disponível na biblioteca digital URLib: <sid.inpe.br/jeferson/2003/08.14.15.10> Acesso em: 13 mar. 2004.
Cichocki, A.; Vorobyov, S. A.; Rutkowski, T. Nonlinear interference cancellation
using neural networks. In: Symposium on Nonlinear Theory and Its Applications, 28 Nov.– 02 Dec. 1999, Hawaii, USA. Proceedings… Hawaii: 1999. v. 2, p. 875-878.
Demuth, H.; Beale, M. Neural network toolbox - for use with MATLAB. Natick,
MA: The MathWorks, Inc., 2000. 842p. Disponível na biblioteca digital URLib: <http://www.mathworks.com/access/helpdesk/help/pdf_doc/nnet/nnet.pdf>. Acesso em: 13 mar. 2003.
Dulk, G. A. Radio emission from the sun and stars. Annual Review of Astronomy
and Astrophysics, n. 23, p. 169-224, Sept. 1985.
[KMD1] Comentário: Butterweck, H.J. Basic theory of the LMS adaptive filter: recent developments. Proc. CSSP-97, 8th Annual ProRISC/IEEE Workshop on Circuits, Systems and Signal Processing, Mierlo, Netherlands, 27-28 November 1997, ISBN 90-73461-12-X, ed. J.P. Veen; STW, Technology Foundation, Utrecht, Netherlands, 1997, pp. 101-108. [ESP-20 b4]
[KMD2] Comentário: A. Cichocki, S.A. Vorobyov, and T. Rutkowski, "Nonlinear Interference Cancellation Using Neural Networks", Proc. Inter. Symposium on Nonlinear Theory and its Applications ``NOLTA'99'', Hilton Waikoloa Village, Hawaii, USA, Vol. 2, pp.875-878, Nov. 28 - Dec. 2, 1999.
[KMD3] Comentário: Annual Review of Astronomy and Astrophysics Vol. 23: 169-224 (Volume publication date September 1985) (doi:10.1146/annurev.aa.23.090185.001125) Radio Emission from the Sun and Stars G A Dulk
[KMD4] Comentário: Acceleration of software algorithms using hardware/software co-design techniques Source Journal of Systems Architecture: the EUROMICRO Journal archive Volume 42 , Issue 9-10 (February 1997) table of contents Pages: 697 - 707 Year of Publication: 1997 ISSN:1383-7621 Authors M. D. Edwards
[KMD5] Comentário: Neural Networks, 2001. Proceedings. IJCNN '01. International Joint Conference on , Volume: 1 Date: 2001 Comparative study of implementing ICNNs on FPGAs, Lim, A.B.; Rajapakse, J.C.; Omondi, A.R. Page(s): 177-182 vol.1 , Digital Object Identifier
[KMD6] Comentário: Falta arrumar: trabalho apresentado em congresso http://bioinfo.cpgei.cefetpr.br/anais/IFAC2002/home.htm
... [2]
... [1]

122
Edwards, M.D.; Forrest, J.; Whelan, A.E. Acceleration of software algorithms using hardware / software co-design techniques. Journal of Systems Architecture, v. 42, n. 9-10, p. 697-707, Feb. 1997. (ISSN:1383-7621).
Faria, C. Um sistema para tratamento e visualização de dados astronômicos
espectrais. 1999. 111p. (INPE-8036-TDI/752). Dissertação (Mestrado em Computação Aplicada) - Instituto Nacional de Pesquisas Espaciais, São José dos Campos, 1999.
Fernandes, F.C.R. BSSup: Atualização do Sistema de Aquisição, Tratamento e
Visualização dedados do Brazilian Solar Spectroscope (BSS). Projeto para Edital CTINFRA – Apoio à manutenção de equipamentos. CNPq 412117/2003-7. São José dos Campos, set. 2003.
Fernandes, F.C.R. Espectrógrafo digital decimétrico de banda larga e
investigações de “flares” solares em ondas decimétricas e raios-X. 1997. 212 p. (INPE- 6396-TDI-612). Tese (Doutorado em Astrofísica) - Instituto Nacional de Pesquisas Espaciais, São José dos Campos, 1997.
Girau, B. On-chip learning of FPGA-inspired neural nets. In: International Joint
Conference on Neural Networks - IJCNN'01, 2001, Washington DC. Proceedings… 2001, p. 222-227.
Goris, M. Categories of radio-frequency interference. Dwingeloo: Netherlands
Found. Res. Astron., 1998. 16 p. (NFRA Tech. Rep. 415/MG/V2.5). Hagan, M.T.; Demuth, H.B.; Beale, M. Neural network design. Boston: PWS
Publishing Company, 1996. 736 p. Haykin, S. Adaptive filter theory. New Jersey: Prentice Hall International, 1991.
936 p. Haykin, S. Redes neurais: princípios e prática. 2.ed. Porto Alegre: Bookman,
2001. 898 p. Haykin, S. Adaptive filters. Disponível na biblioteca digital URLib:
<http://soma.crl.mcmaster.ca/ASL/PUBS/ FTP/Adaptive.IEEE.98.ps>. Acesso em: 10 Jan. 2003.
Johnson, J. R. Introduction to digital signal processing. New Jersey: Prentice
Hall International, 1989. 423 p. Klimasauskas, C. Neural nets and noise filtering. Dr. Dobb’s Journal, p. 32-95,
Jan. 1989.

123
Kane, S.R. Impulsive (flash) phase of solar flares: hard x-ray, microwave, EUV
and optical observations. In: Coronal Disturbances, IAU Symposium No. 57, 1974. Proceedings… G. A. Newkirk, p. 105, 1974.
Kraus, J. D. Radio astronomy. 2.ed. Ohio: Cygnos-Quasar Books, 1986. 719p. Lim, A. B.; Rajapakse, J. C.; Omondi, A. R. Comparative study of implementing
ICNNs on FPGAs. Neural Networks, v.1, p.177-182, 2001. (IJCNN.2001.939013). Lynn, P. A.; Fuerst, W. Digital signal processing. New York: John Winley &
Sons, 1989. 494p. Martinon, A. R. F.; Fernandes, F. C. R., Desenvolvimento/adaptação de software
com aplicação na análise de dados do Brazilian Solar Spectroscope (BSS). São José dos Campos: INPE, 2000. 32 p. (Iniciação Científica, PIBIC/INPE) Anais... São José dos Campos: INPE, 2000. p. 1-32.
Martinon, A. R. F; Dobrowolski, M.; Jônatas Preto, A.; Stephany, S. Otimização de
rotinas do software BSSData utilizando MMX. In: Encontro Regional de Matemática Aplicada e Computacional (ERMAC), 3., 2003, São José dos Campos. Anais... 2003.
Martinon, A.R.F; Sawant, H. S.; Stephany, S.; Jônatas Preto, A.; Dobrowolski, M.
BSSLibrary - Uma biblioteca de rotinas vetorizadas para filtragem de dados em radioastronomia solar. In: Workshop dos Cursos de Computação Aplicada do INPE, 2., 2002, São José dos Campos. Anais... São José dos Campos: INPE, 2002. p. 167-172.
Martinon, A.R.F. BSSDATA - protótipo de um sistema otimizado para tratamento
e análise de dados do BSS. 2003. Dissertação (Mestrado em Computação Aplicada) - Instituto Nacional de Pesquisas Espaciais, São José dos Campos, 2003.
MathWorks, The. Filter design toolbox - for use with MATLAB. Natick: The
MathWorks, 2002. 1052p. Disponível na biblioteca digital URLib: <http://www.mathworks.com/access/helpdesk_r12p1/help/pdf_doc/filterdesign/fdq.pdf>.Acesso em: 10 mar. 2003.
McLean, D.J.; Labrum, N.R. Solar Radiophysics. Cambridge: Cambridge
University Press, 1985. 540p.

124
Meng Joo, E.; Aung Min, S. Adaptive noise cancellation using dynamic fuzzy neural networks algorithm. In: Triennial World Congress of the International Federation of Automatic Control 15., 21–26 July 2002, Barcelona, Spain. Proceedings… [S.l.]: IFAC World Congress, 2002. p. 276.
Mitchell, D. A.; Bower, G. C. Cancelling satellite interference at the Rapid
Prototyping Array. A comparison of voltage and power domain techniques. Rapid Prototyping Array Research, ATA Memo 36, Dec. 2001. 26 p.
Nascimento, V.F.; Sawant, H.S.; Fernandes, F.C.R. Participação no
desenvolvimento de rotinas de calibração e análise dos dados digitais do Brazilian Solar Spectroscope (BSS). São José dos Campos: INPE, 2002. 9 p. (Iniciação Científica, PIBIC/INPE).
Paraskeva, G. Neural fuzzy theory and adaptive noise cancellation techniques.
Disponível na biblioteca digital URLib: < http://www.eng.warwick.ac.uk/ staff/ elh/ es327/GeorgeParaskeva.pdf>. Acesso em: 02 nov. 2003.
Pradhan, S.S.; Reddy, V. U. A new approuch to subband adaptive filtering. IEEE
Transactions On Signal Processing, v. 47, n. 3, p. 655-664, Mar. 1999. Russo, F. Hybrid neuro-fuzzy filter for impulse noise removal. Pattern
Recognition, n. 32, p. 1843-1855, Nov. 1999. Sawant, H. S.; Sobral, J. H. A.; Neri, J. A. C. F.; Fernandes, F. C. R.; Cecatto, J. R.;
Rosa, R. R. High Sensitivity Digital Decimetric Spectroscope. Advances in Space Research, n. 13, p. 199-202, 1993.
Sawant, H. S.; Sobral, J. H. A.; Fernandes, F. C. R.; Cecatto, J. R.; Day, W. R. G.;
Neri, J. A. C. F.; Alonso, E. M. B.; Moraes, A. High sensitivity wide band digital solar polarimetric spectroscope. Advances in Space Research, n. 17, p. 385-388, 1996.
Sawant, H.S.; Subramanian, K.R.; Faria, C.; Stephany, S.; Fernandes, F.C.R.;
Cecatto, J.R.; Rosa, R.R.; Alonso, E.M.B.; Mesquita, F.P.V.; Portezani, V.A. Acquisition and recent results of the Brazilian Solar Spectroscope – BSS. ASP Conference Series, v. 206, p. 347-350, 2000.
Sawant, H.S.; Subramanian, K.R; Faria, C.; Fernandes, F.C.R.; Sobral, J.H.A.;
Cecatto, J.R.; Rosa, R.R.; Vats, H.O.; Neri J.A.C.F.; Alonso, E.M.B.; Mesquita F. P.V.; Portezani, V.A.; Martinon A.R.F. Brazilian Solar Spectroscope (BSS). Solar Physics, n. 200, p. 167-176, 2001.

125
Sawant, H. S. Arranjo interferométrico brasileiro. São José dos Campos: INPE, 2001. 3p. (Projeto Temático Fapesp n. 01/00056-9).
Stewart, R. W.; Harteneck, M.; Weiss, S. Interactive teaching of adaptive signal
processing. IEEE Engineering Science and Education Journal, v. 9, n. 4, p. 161-168, Aug. 2000.
Sturrock, P. A. Solar Flares: a monograph from Skylab Solar Workshop II. Report
of NASA Skylab Workshop on Solar Flares. Boulder: Colorado University Press, 1980.
Tsoukalas, L. H.; Uhrig, R. E. Fuzzy and neural approaches in engineering.
New York: Wiley-Interscience, 1997. 587p. van der Venn, A. L.; van der Venn, A. J.; Boonstra, A. J. Multichannel interference
mitigation techniques in radio astronomy. The Astronomical Journal Supplement Series, n. 131, p. 355-373, Nov. 2000.
Vorobyov, S. A.; Cichocki, A.; Bodyanskiy, Y. V. Adaptive noise cancellation for
multi-sensory signals. Fluctuation and Noise Letters, 2001. Vorobyov, S. A.; Cichocki, A. Hyper radial basis function neural networks for
interference cancellation with nonlinear processing of reference signal. Digital Signal Processing, v. 11, p. 204–221, 2001.
Wan, E. A. Adjoint LMS: an efficient alternative to the filtered-XLMS and multiple
error LMS algorithms. Proceedings of IEEE International Conference on Acoustic. Speech and Signal Processing, v. 3, p. 1842-1845, May 1996.
Widrow, B.; Glover Jr., J. R.; McCool, J. M.; Kaunitz, J.; Williams, C. S.; Hearn,
R. H.; Zeidler, J. R.; Dong Jr., E.; Goodlin, R. C. Adaptive noise canceling: principles and applications. Proceedings of the IEEE, v. 63, n. 12, p. 1692, 1975.
Widrow, B.; Stearns, S. D. Adaptive signal processing. New Jersey: Prentice
Hall, 1985. 528p. Woon-Seng Gan. Fuzzy step-size adjustment for the LMS algorithm. Signal
Processing, n. 49, p. 145-149, 1996.

Página 121: [1] [KMD4] ComentárioKleber de Mattos Dobrowolski 28/4/2006 15:59:00
Acceleration of software algorithms using hardware/software co-design techniques
Source Journal of Systems Architecture: the EUROMICRO Journal archive
Volume 42 , Issue 9-10 (February 1997) table of contents
Pages: 697 - 707
Year of Publication: 1997
ISSN:1383-7621
Authors
M. D. Edwards
J. Forrest
A. E. Whelan
Publisher
Elsevier North-Holland, Inc. New York, NY, USA
Página 121: [2] [KMD5] ComentárioKleber de Mattos Dobrowolski 4/5/2006 15:54:00
Neural Networks, 2001. Proceedings. IJCNN '01. International Joint Conference on , Volume: 1 Date:
2001
Comparative study of implementing ICNNs on FPGAs, Lim, A.B.; Rajapakse, J.C.; Omondi, A.R.
Page(s): 177-182 vol.1 , Digital Object Identifier 10.1109/IJCNN.2001.939013