feedback control for steering needles through 3d deformable tissue using helical paths kris hauser,...
TRANSCRIPT

Feedback Control for Steering Needles Through 3D Deformable Tissue Using Helical Paths
Kris Hauser, Ron Alterovitz, Nuttapon Chentanez, Allison Okamura, Ken Goldberg.
Yajia Zhang

Background
• Needles are used in medicine for a wide range of diagnostic and therapy delivery procedures.
• Needle tip must be positioned accurately at the target in the tissue. But the process requires skills. Errors may occur even under image guidance.
• Feedback controller that steers the needle and places the needle tip at the target even under the perturbation of the tissue and deflection of the needle trajectory.

Background
• Bevel-tip steerable needle• Steering the needle:
1. Force along the z axis. Cause the needle tip rotate about the x axis.
2. Rotate about the z axis. • Constant-Insertion-Speed and Constant-Twist-Rate
Helix Trajectory of needle tip• Needle tip position determined by inserted distance
d and twist rate φ.

Goal
• Feedback controller to steer the bevel-tip needle with:
1.Constant insertion speed2.Different twist rate
to reach the target in the tissue.

Why real time planner• Deformation of the tissue. Cause position of the target change.
• Deflection of the planned trajectory.

Controller Framework• For every iteration:
I. Propose: Generate a set P of proposal trajectories. Different φ maps to different trajectory.
II. Select:Find the trajectory with control φ(d) in the set P that achieves the minimal distance to the target.
III. Execute:Insert according to φ(d) and constant velocity for time Δt.

I. ProposeGenerate Proposal Trajectories
• When inserting the needle into the tissue, we build the coordinate frame according to the position of the needle tip.

Constant-Twist-Rate Helical Paths
• After moving along the helix trajectory, we need to know what the coordinate of the need tip according to the initial frame.
• :Helix with radius a, slope θ and oriented along the z axis.
)(dh

Constant-Twist-Rate Helical Paths
• : coordinate of the needle tip followed under a constant twist rate φ and insertion d.
• Rigid Transformation:
)(dt
)()( dtdAh
2sin)sec)/sin((cos
)sec)/cos((
cossin)sec)/((sin
)(
drda
arda
drda
dt
2cosra rtan

Constant-Twist-Rate Reachable Set• The trajectory with infinity twist rate will almost
along the z axis.
}0),,(|)({)( ddtR

Alternating-Twist Maneuver
• For finite maximum twist rate, alternating-twist maneuver can reduce the gap along the z axis.
}0],,[|)({)( maxmaxmax ddtR )(R
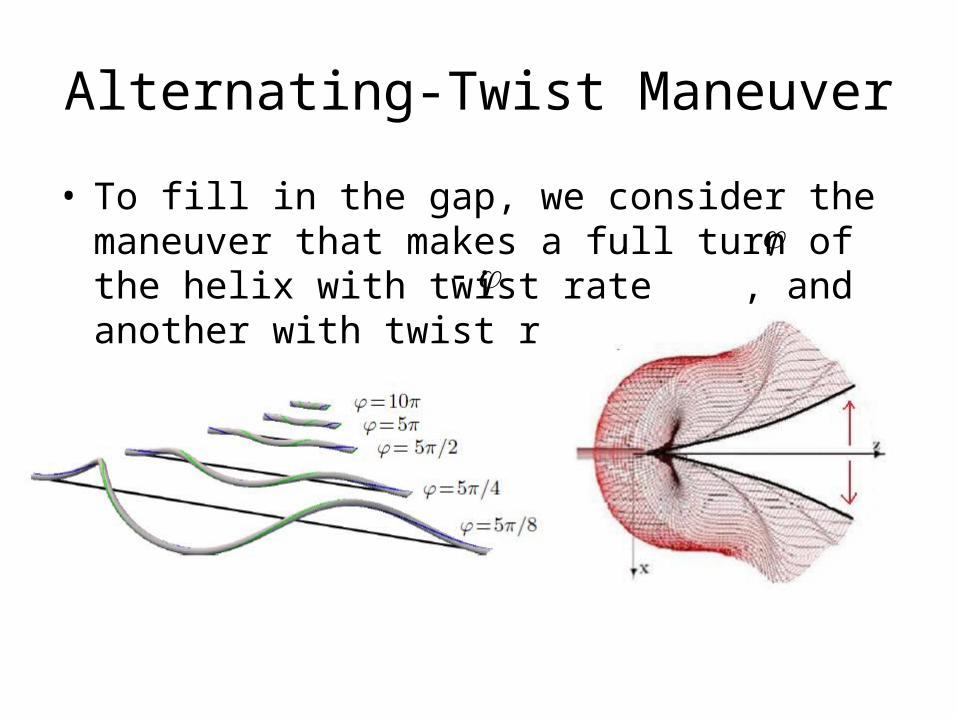
Alternating-Twist Maneuver
• To fill in the gap, we consider the maneuver that makes a full turn of the helix with twist rate , and another with twist rate

II. SelectChoose the trajectory with minimum distance to target
• Minimize • + proposal trajectories in
the gap• Auxiliary function is used to calculate a tight
lower bound of given a region R.
||target)(||),( dtdf }0,|||),{( max ddS
)(RfL),( df

Branch-and-Bound• A search tree recursively split the space into
subregions. We maintain the helix * and insertion distance d* which give the minimum value of f. If of subregion R gives value larger than f, we can safely prune the region. We continue the process until f achieves an ε tolerance.
)(RfL

III. Execute
• Insert according to the select trajectory for time Δt or some distance Δd.

Simulation

Simulation Result
• Accuracy: The final distance from the needle tip to the target when the controller terminates.
• Reference controller: A refresh occurs every 2%r of insertion distance, maximum twist rate = 10π rad/rmax

Simulation Result
• Accuracy Without Perturbations:

Simulation Result
• Accuracy Under Perturbations and Modeling Errors:
• Gaussian Noise

Possible Improvement
• Avoid the obstaclesSet intermediate Target’. When reaching Target’, we may just assume the Target moved.
Target
Target’
Issue About Real Time Planning
• How often should we re-plan?• The reference controller refreshes after inserting
length s= 2%r to achieve high accuracy.• What if the deformation and deflection do not
happen (or some tiny changes)? • Complex system may require intense computation in
re-planning.